
Unmanned Surface Vessels in Marine Surveillance and Management: Advances in Communication, Navigation, Control, and Data-Driven Research

Abstract
1. Introduction
2. Communication Networking
2.1. Communication Methods
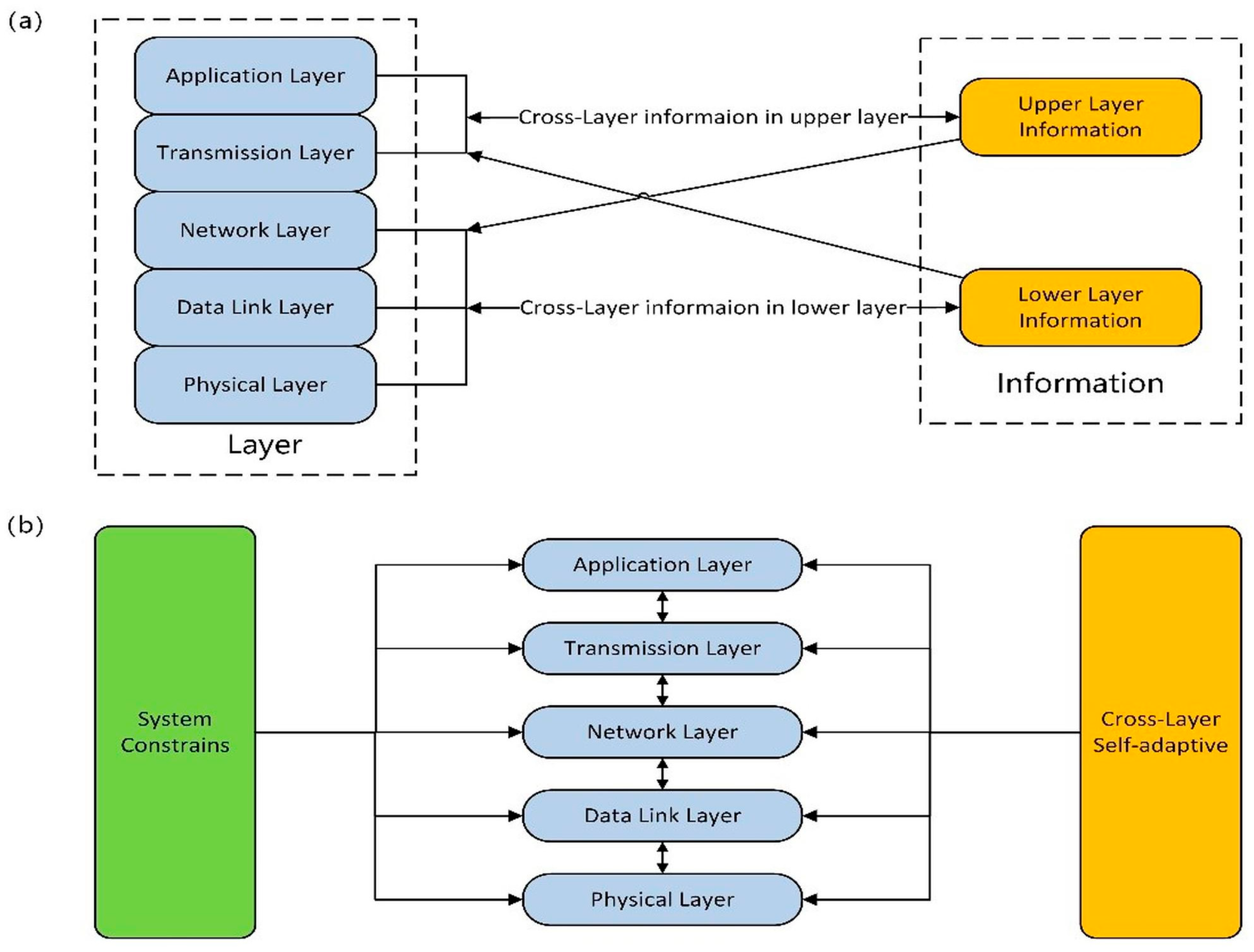
2.2. Communication Protocols
2.3. Communication Topologies
3. Navigation
3.1. Global Navigation
3.2. Local Navigation
3.3. Collaborative Navigation
3.4. Autonomous Navigation
4. Control
4.1. Group Control
4.2. Distribution Control
4.3. Adaptive Control
4.4. Collaborative Control
5. Data-Driven Tasks
5.1. Investigation
5.2. Measurement
5.3. Perception
6. Summary and Suggestions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Abbreviation | Full Name | Initial Page |
|---|---|---|
| USV | Unmanned Surface Vehicle | 1 |
| D2QN-JTP | Double Deep Q-Network based Joint Trajectory and Power optimization | 3 |
| AUV | Autonomous Underwater Vehicle | 6 |
| DQN | Deep Q-Network | 6 |
| ME | Magnetoelectric Effect | 6 |
| OAM | Orbital Angular Momentum | 6 |
| HRI | Human-Robot Interaction | 6 |
| DDPG | Deep Deterministic Policy Gradient | 6 |
| SNR | Signal-to-Noise Ratio | 6 |
| BER | Bit Error Rate | 6 |
| DRL | Deep Reinforcement Learning | 6 |
| PHY | Physical Layer | 9 |
| MAC | Medium Access Control Layer | 9 |
| GPS | Global Positioning System | 10 |
| INS | Inertial Navigation System | 10 |
| DWA | Dynamic Window Approach | 13 |
| GNSS | Global Navigation Satellite System | 13 |
| AI | Artificial Intelligence | 13 |
| SLAM | Simultaneous Localization and Mapping | 13 |
| UAV | Unmanned Aerial Vehicle | 13 |
| LiDAR-SLAM | Light Detection and Ranging-based Simultaneous Localization and Mapping | 14 |
| RMSE | Root Mean Square Error | 14 |
| PID | Proportional-Integral-Derivative | 14 |
| FBLS | Fast Broad Learning System | 15 |
| SVM | Support Vector Machine | 15 |
| IMU | Inertial Measurement Unit | 15 |
| RMS | Root Mean Square | 15 |
| RTS | Rauch–Tung–Striebel smoother | 15 |
| GRU | Gated Recurrent Unit | 15 |
| RTK | Real-Time Kinematic | 15 |
| TFMS | Trajectory Feasibility Management System | 15 |
| MPC | Model Predictive Control | 15 |
| RL | Reinforcement Learning | 15 |
| RRT | Rapidly-Exploring Random Tree | 15 |
| MADDPG | Multi-Agent Deep Deterministic Policy Gradient | 15 |
| SM | Sliding Mode | 15 |
| TOD | Time of Departure | 15 |
| BCS | Bayesian Compressive Sensing | 15 |
| Faster R-CNN | Faster Region-based Convolutional Neural Network | 15 |
| LSTM | Long Short-Term Memory | 15 |
| MODD2 | Maritime Object Detection Dataset, version 2 | 15 |
| FPS | Frames Per Second | 15 |
| MOOS-IvP | Mission Oriented Operating Suite—Interval Programming | 15 |
| DNN | Deep Neural Network | 15 |
| GAN | Generative Adversarial Network | 15 |
| MBZIRC | Mohamed Bin Zayed International Robotics Challenge | 15 |
| WaSR | Water-obstacle Separation and Refinement | 15 |
| IMU | Inertial Measurement Unit | 15 |
| MaSTr1325 | Maritime Semantic Trajectory dataset with 1325 images | 15 |
| FRN | Feature Refinement Network | 15 |
| MIoU | Mean Intersection over Union | 15 |
| MPA | Mean Pixel Accuracy | 15 |
| A* | A-star Search Algorithm | 16 |
| COLREG | International Regulations for Preventing Collisions at Sea | 18 |
| DDQN | Double Deep Q-Network | 20 |
| VV-A* | Velocity-Varying A-star | 20 |
| AIS | Automatic Identification System | 20 |
| ANN | Artificial Neural Network | 20 |
| L-F + FT | Leader–Follower with Fault Tolerance | 20 |
| NSFQ-RBF | Non-Singular Fast Terminal Sliding Mode Control with Radial Basis Function Neural Network | 20 |
| IQPSO | Improved Quantum-behaved Particle Swarm Optimization | 20 |
| VO | Velocity Obstacle | 20 |
| DZ | Dead Zone | 20 |
| NMPC | Nonlinear Model Predictive Control | 21 |
| DT | Decision Tree | 21 |
| ANFIS | Adaptive Neuro-Fuzzy Inference System | 21 |
| DET | Deterministic Control | 21 |
| ICM-DDPG | Intrinsic Curiosity Module with Deep Deterministic Policy Gradient | 21 |
| LOS | Line-of-Sight Guidance | 21 |
| ENDURUNS | Energy-based Durable Unmanned Surveying system | 23 |
| COVID-19 | Coronavirus Disease 2019 | 23 |
| USV SL-20 | SL20 Autonomous Survey Boat | 23 |
| CAC | Cooperative Autonomous Capture | 26 |
References
- Kang, Z.; Gao, M.; Liao, Z.; Zhang, A. Collaborative Communication-Based Ocean Observation Research with Heterogeneous Unmanned Surface Vessels. Front. Mar. Sci. 2024, 11, 1388617. [Google Scholar] [CrossRef]
- Patterson, R.G.; Lawson, E.; Udyawer, V.; Brassington, G.B.; Groom, R.A.; Campbell, H.A. Uncrewed Surface Vessel Technological Diffusion Depends on Cross-Sectoral Investment in Open-Ocean Archetypes: A Systematic Review of USV Applications and Drivers. Front. Mar. Sci. 2022, 8, 736984. [Google Scholar] [CrossRef]
- Yang, T.; Guo, Y.; Zhou, Y.; Wei, S. Joint Communication and Control for Small Underactuated USV Based on Mobile Computing Technology. IEEE Access 2019, 7, 160610–160622. [Google Scholar] [CrossRef]
- Zhang, J.; Dai, M.; Su, Z. Task Allocation with Unmanned Surface Vehicles in Smart Ocean IoT. IEEE Internet Things J. 2020, 7, 9702–9713. [Google Scholar] [CrossRef]
- Liu, Y.; Song, R.; Bucknall, R.; Zhang, X. Intelligent Multi-Task Allocation and Planning for Multiple Unmanned Surface Vehicles (USVs) Using Self-Organising Maps and Fast Marching Method. Inf. Sci. 2019, 496, 180–197. [Google Scholar] [CrossRef]
- Zhang, J.; Ren, J.; Cui, Y.; Fu, D.; Cong, J. Multi-USV Task Planning Method Based on Improved Deep Reinforcement Learning. IEEE Internet Things J. 2024, 11, 18549–18567. [Google Scholar] [CrossRef]
- Zhang, J.; Cui, Y.; Fan, X.; Ren, J. Asynchronous Multithreading Reinforcement Control Decision Method for Unmanned Surface Vessel. IEEE Internet Things J. 2023, 10, 22806–22822. [Google Scholar] [CrossRef]
- Liu, Y.; Bucknall, R. Efficient Multi-Task Allocation and Path Planning for Unmanned Surface Vehicle in Support of Ocean Operations. Neurocomputing 2018, 275, 1550–1566. [Google Scholar] [CrossRef]
- Lv, Z.; Zhang, J.; Jin, J.; Li, Q.; Liu, L.; Zhang, P.; Gao, B. Underwater Acoustic Communication Quality Evaluation Model Based on USV. Shock Vib. 2018, 2018, 2609073. [Google Scholar] [CrossRef]
- Chitre, M.; Shahabudeen, S.; Freitag, L.; Stojanovic, M. Recent advances in underwater acoustic communications & networking. In Proceedings of the OCEANS 2008, Quebec City, QC, Canada, 15–18 September 2008; pp. 1–10. Available online: https://ieeexplore.ieee.org/document/5152045 (accessed on 8 March 2025).
- Li, J.-H.; Kang, H.; Kim, M.-G.; Lee, M.-J.; Cho, G.R.; Jin, H.-S. Adaptive Formation Control of Multiple Underactuated Autonomous Underwater Vehicles. J. Mar. Sci. Eng. 2022, 10, 1233. [Google Scholar] [CrossRef]
- Hu, Z.; Su, Z.; Xu, Q. USV-Aided Data Secure Collection Scheme for Underwater Wireless Acoustic Networks. In Proceedings of the GLOBECOM 2023—2023 IEEE Global Communications Conference, Kuala Lumpur, Malaysia, 4–8 December 2023; IEEE: Piscataway, NJ, USA, 2023; pp. 7157–7162. [Google Scholar] [CrossRef]
- Zhang, H.; Wu, L.; Zhi, Y.; Yang, C.; Cao, X.; Zhang, J.; Li, H. Throughput Maximization for USV-Enabled Underwater Wireless Networks Under Jamming Attack. IEEE Sens. J. 2024, 24, 21987–21996. [Google Scholar] [CrossRef]
- Zi, G.; Ma, Z.; Wang, Y.; Wang, Y.; Jia, Z.; Zhao, S.; Huang, D.; Wang, T. Miniaturized Low-Frequency Communication System Based on the Magnetoelectric Effect. Micromachines 2023, 14, 1830. [Google Scholar] [CrossRef] [PubMed]
- He, X.; Dong, H.-W.; Ren, Z.; Zhao, S.-D.; Wang, K.; Hu, Y.; Xiang, P.; Li, Y.; Chen, M.; Fang, D. Inverse-Designed Single-Phase Elastic Metasurfaces for Underwater Acoustic Vortex Beams. J. Mech. Phys. Solids 2023, 174, 105247. [Google Scholar] [CrossRef]
- Hożyń, S. Advancements in Visual Gesture Recognition for Underwater Human–Robot Interaction: A Comprehensive Review. IEEE Access 2024, 12, 163131–163142. [Google Scholar] [CrossRef]
- Routray, S.K.; Javali, A.; Sharma, L.; Gupta, J.; Sahoo, A. The New Frontiers of 800G High Speed Optical Communications. In Proceedings of the 2020 4th International Conference on Electronics, Communication and Aerospace Technology (ICECA), Coimbatore, India, 5–7 November 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 821–825. [Google Scholar] [CrossRef]
- Angus, J.; Bouvier-Brown, M.; Robinson, A. Solar Powered Uncrewed Surface Vehicles (USVs) for Marine Protected Area (MPA) Monitoring. In Proceedings of the OCEANS 2022, Hampton Roads, VA, USA, 17–20 October 2022; IEEE: Piscataway, NJ, USA, 2022; pp. 1–5. [Google Scholar] [CrossRef]
- Shin, H.; Baek, S.; Song, Y. Multidimensional Beam Optimization in Underwater Optical Wireless Communication Based on Deep Reinforcement Learning. IEEE Internet Things J. 2024, 11, 28623–28634. [Google Scholar] [CrossRef]
- Jun-Hong, C.; Jiejun, K.; Gerla, M.; Zhou, S. The Challenges of Building Scalable Mobile Underwater Wireless Sensor Networks for Aquatic Applications. IEEE Netw. 2006, 20, 12–18. [Google Scholar] [CrossRef]
- Zhao, D.; Lun, G.; Xue, R.; Sun, Y. Cross-Layer-Aided Opportunistic Routing for Sparse Underwater Wireless Sensor Networks. Sensors 2021, 21, 3205. [Google Scholar] [CrossRef] [PubMed]
- Balador, A.; Kouba, A.; Cassioli, D.; Foukalas, F.; Severino, R.; Stepanova, D.; Agosta, G.; Xie, J.; Pomante, L.; Mongelli, M.; et al. Wireless Communication Technologies for Safe Cooperative Cyber Physical Systems. Sensors 2018, 18, 4075. [Google Scholar] [CrossRef]
- Dol, H. EDA-SALSA: Towards Smart Adaptive Underwater Acoustic Networking. In Proceedings of the OCEANS 2019—Marseille, Marseille, France, 17–20 June 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Hermans, J.; Sklivanitis, G.; Pados, D.A. A First-of-Its-Kind Low Size, Weight and Power Run-Time Reconfigurable Underwater Modem. In Proceedings of the 2022 Sixth Underwater Communications and Networking Conference (UComms), Lerici, Italy, 30 August–1 September 2022; IEEE: Piscataway, NJ, USA, 2022; pp. 1–5. [Google Scholar] [CrossRef]
- Lu, Y.; Shan, Q.; Xiao, G.; Liang, Y.; Liu, W. Green Polymorphic Cooperative Formation Strategy of Low-Carbon Unmanned Surface Vessels. Front. Energy Res. 2022, 10, 953485. [Google Scholar] [CrossRef]
- Dai, M.; Wu, Y.; Qian, L.; Su, Z.; Lin, B.; Chen, N. UAV-Assisted Multi-Access Computation Offloading via Hybrid NOMA and FDMA in Marine Networks. IEEE Trans. Netw. Sci. Eng. 2023, 10, 113–127. [Google Scholar] [CrossRef]
- Pompili, D.; Akyildiz, I.F. A Multimedia Cross-Layer Protocol for Underwater Acoustic Sensor Networks. IEEE Trans. Wirel. Commun. 2010, 9, 2924–2933. [Google Scholar] [CrossRef]
- Li, N.; Martínez, J.-F.; Meneses Chaus, J.; Eckert, M. A Survey on Underwater Acoustic Sensor Network Routing Protocols. Sensors 2016, 16, 414. [Google Scholar] [CrossRef] [PubMed]
- Dhongdi, S.C.; Nahar, P.; Sethunathan, R.; Gudino, L.J.; Anupama, K.R. Cross-Layer Protocol Stack Development for Three-Dimensional Underwater Acoustic Sensor Network. J. Netw. Comput. Appl. 2017, 92, 3–19. [Google Scholar] [CrossRef]
- Liu, S.; Wang, J.; Shi, W.; Han, G.; Yan, S.; Li, J. CLORP: Cross-Layer Opportunistic Routing Protocol for Underwater Sensor Networks Based on Multiagent Reinforcement Learning. IEEE Sens. J. 2024, 24, 17243–17258. [Google Scholar] [CrossRef]
- Lindsay, J.; Ross, J.; Seto, M.L.; Gregson, E.; Moore, A.; Patel, J.; Bauer, R. Collaboration of Heterogeneous Marine Robots Toward Multidomain Sensing and Situational Awareness on Partially Submerged Targets. IEEE J. Ocean Eng. 2022, 47, 880–894. [Google Scholar] [CrossRef]
- Yuan, Y.; Zhuo, X.; Liu, M.; Wei, Y.; Qu, F. A Centralized Cross-Layer Protocol for Joint Power Control, Link Scheduling, and Routing in UWSNs. IEEE Internet Things J. 2024, 11, 12823–12833. [Google Scholar] [CrossRef]
- Antal, C.; Cioara, T.; Anghel, I.; Antal, M.; Salomie, I. Distributed Ledger Technology Review and Decentralized Applications Development Guidelines. Future Internet 2021, 13, 62. [Google Scholar] [CrossRef]
- Duckham, M.; Nussbaum, D.; Sack, J.-R.; Santoro, N. Efficient, Decentralized Computation of the Topology of Spatial Regions. IEEE Trans. Comput. 2011, 60, 1100–1113. [Google Scholar] [CrossRef]
- Sun, X.; Wang, G.; Fan, Y.; Mu, D.; Qiu, B. A Formation Collision Avoidance System for Unmanned Surface Vehicles with Leader-Follower Structure. IEEE Access 2019, 7, 24691–24702. [Google Scholar] [CrossRef]
- Zhang, G.; Liu, S.; Zhang, X. Adaptive Distributed Fault-Tolerant Control for Underactuated Surface Vehicles with Bridge-to-Bridge Event-Triggered Mechanism. Ocean Eng. 2022, 262, 112205. [Google Scholar] [CrossRef]
- Tan, G.; Sun, H.; Du, L.; Zhuang, J.; Zou, J.; Wan, L. Coordinated Control of the Heterogeneous Unmanned Surface Vehicle Swarm Based on the Distributed Null-Space-Based Behavioral Approach. Ocean Eng. 2022, 266, 112928. [Google Scholar] [CrossRef]
- Zhang, S.; Xiang, X.; Yang, S. Communication Network and Qos Evaluation for Formation Control of Unmanned Surface Vehicles. Brodogradnja 2020, 71, 19–37. [Google Scholar] [CrossRef]
- Shan, Q.; Liu, W.; Li, T.; Zhang, H. A Topology Reconfiguration Strategy for Containment Control of the Multi-USV System Based on Algebraic Connectivity. IEEE Trans. Ind. Electron. 2024, 72, 5322–5332. [Google Scholar] [CrossRef]
- Dai, M.; Huang, N.; Wu, Y.; Qian, L.; Lin, B.; Su, Z.; Lu, R. Latency Minimization Oriented Hybrid Offshore and Aerial-Based Multi-Access Computation Offloading for Marine Communication Networks. IEEE Trans. Commun. 2023, 71, 6482–6498. [Google Scholar] [CrossRef]
- Chen, X.; Tang, J.; Lao, S. Review of Unmanned Aerial Vehicle Swarm Communication Architectures and Routing Protocols. Appl. Sci. 2020, 10, 3661. [Google Scholar] [CrossRef]
- Namgung, H.; Jeong, J.S.; Choi, J.; Geun-ung, K.; Sun-Young, K. An Experimental Result on Information Exchange Using USV Communication Relay System. J. Phys. Conf. Ser. 2019, 1357, 012043. [Google Scholar] [CrossRef]
- Wang, Q.; Liu, S.; Zhang, B.; Zhang, C. FBLS-Based Fusion Method for Unmanned Surface Vessel Positioning Considering Denoising Algorithm. J. Mar. Sci. Eng. 2022, 10, 905. [Google Scholar] [CrossRef]
- Lou, N.; Liu, W.; Hu, Y.; Wang, S.; Han, B. A Robust Integrated Navigation Optimization Method for USV in Signal Occlusion Environment. Phys. Scr. 2024, 99, 096006. [Google Scholar] [CrossRef]
- Specht, M. Testing and Analysis of Selected Navigation Parameters of the GNSS/INS System for USV Path Localization during Inland Hydrographic Surveys. Sensors 2024, 24, 2418. [Google Scholar] [CrossRef]
- Yu, Y.; Fan, Y.; Zhang, Y.; Mu, D.; Sun, X. An Autonomous Collision Avoidance System Unified with the TFMS and the FCS-MPC Strategy for USV. In Proceedings of the 2022 41st Chinese Control Conference (CCC), Hefei, China, 25–27 July 2022; IEEE: Piscataway, NJ, USA, 2022; pp. 3438–3443. Available online: https://ieeexplore.ieee.org/abstract/document/9902408 (accessed on 9 January 2025).
- Lin, X.; McConnell, J.; Englot, B. Robust Unmanned Surface Vehicle Navigation with Distributional Reinforcement Learning 2023. In Proceedings of the 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Detroit, MI, USA, 1–5 October 2023; pp. 6185–6191. Available online: https://ieeexplore.ieee.org/document/10342389 (accessed on 26 March 2025).
- Song, B.; Zhang, J.; Han, X.; Fan, Y.; Sun, Z.; Wang, Y. An Efficient Autonomous Exploration Framework for Unmanned Surface Vehicles in Unknown Waters. J. Mar. Sci. Eng. 2024, 12, 1622. [Google Scholar] [CrossRef]
- Wen, J.; Liu, S.; Lin, Y. Dynamic Navigation and Area Assignment of Multiple USVs Based on Multi-Agent Deep Reinforcement Learning. Sensors 2022, 22, 6942. [Google Scholar] [CrossRef]
- Liu, J.; Guo, H.; Liu, X.; Pan, S. USV Cluster Cooperative Navigation Algorithm Based on Factor Graph. In Proceedings of the 2022 IEEE 6th Advanced Information Technology, Electronic and Automation Control Conference (IAEAC), Beijing, China, 3–5 October 2022; IEEE: Piscataway, NJ, USA, 2022; pp. 955–959. [Google Scholar] [CrossRef]
- Nantogma, S.; Zhang, S.; Yu, X.; An, X.; Xu, Y. Multi-USV Dynamic Navigation and Target Capture: A Guided Multi-Agent Reinforcement Learning Approach. Electronics 2023, 12, 1523. [Google Scholar] [CrossRef]
- Chen, H.; Li, Y.; Liu, C.; Xiao, Z.; Rao, H. Set-Membership State Estimation for Unmanned Surface Vehicle Steering Motion with Try-Once-Discard Protocol. IEEE Sens. J. 2023, 23, 14592–14600. [Google Scholar] [CrossRef]
- Wang, Z.; Lou, P.; Wang, Y.; Li, J.; Wang, J. Motion State Estimation with Bandwidth Constraints and Mixed Cyber-Attacks for Unmanned Surface Vehicles: A Resilient Set-Membership Filtering Framework. Sensors 2024, 24, 6834. [Google Scholar] [CrossRef]
- Chen, Y.; Chen, X.; Zhu, J.; Lin, F.; Chen, B.M. Development of an Autonomous Unmanned Surface Vehicle with Object Detection Using Deep Learning. In Proceedings of the IECON 2018—44th Annual Conference of the IEEE Industrial Electronics Society, Washington, DC, USA, 21–23 October 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 5636–5641. [Google Scholar] [CrossRef]
- Yan, N.; Huang, S.; Kong, C. Reinforcement Learning-Based Autonomous Navigation and Obstacle Avoidance for USVs under Partially Observable Conditions. Math. Probl. Eng. 2021, 2021, 5519033. [Google Scholar] [CrossRef]
- Yao, L.; Kanoulas, D.; Ji, Z.; Liu, Y. ShorelineNet: An Efficient Deep Learning Approach for Shoreline Semantic Segmentation for Unmanned Surface Vehicles. In Proceedings of the 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Prague, Czech Republic, 27 September–1 October 2021; IEEE: Piscataway, NJ, USA, 2021; pp. 5403–5409. [Google Scholar] [CrossRef]
- Sun, W.; Gao, X. Deep Learning-Based Trajectory Tracking Control for Unmanned Surface Vehicle. Math. Probl. Eng. 2021, 2021, 8926738. [Google Scholar] [CrossRef]
- Ma, L.; Xie, W.; Huang, H. Convolutional Neural Network Based Obstacle Detection for Unmanned Surface Vehicle. Math. Biosci. Eng. 2020, 17, 845–861. [Google Scholar] [CrossRef]
- Ahmed, M.; Bakht, A.B.; Hassan, T.; Akram, W.; Humais, A.; Seneviratne, L.; He, S.; Lin, D.; Hussain, I. Vision-Based Autonomous Navigation for Unmanned Surface Vessel in Extreme Marine Conditions. In Proceedings of the 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Detroit, MI, USA, 1–5 October 2023; IEEE: Piscataway, NJ, USA, 2023; pp. 7097–7103. [Google Scholar] [CrossRef]
- Bovcon, B.; Kristan, M. A Water-Obstacle Separation and Refinement Network for Unmanned Surface Vehicles. In Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 31 May–31 August 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 9470–9476. [Google Scholar] [CrossRef]
- Zhou, W.; Huang, X.; Zeng, X. Obstacle Detection for Unmanned Surface Vehicles by Fusion Refinement Network. IEICE Trans. Inf. Syst. 2022, E105.D, 1393–1400. [Google Scholar] [CrossRef]
- Chen, H.; Lin, Z.; Chen, Z.; Jian, J.; Liu, C. Adaptive DWA Algorithm with Decision Tree Classifier for Dynamic Planning in USV Navigation. Ocean Eng. 2025, 321, 120328. [Google Scholar] [CrossRef]
- Akram, W.; Yang, S.; Kuang, H.; He, X.; Din, M.; Dong, Y.; Lin, D. Long-Range Vision-Based UAV-assisted Localization for Unmanned Surface Vehicles. arXiv 2024, arXiv:2408.11429. [Google Scholar] [CrossRef]
- Shen, W.; Yang, Z.; Yang, C.; Li, X. A LiDAR SLAM-Assisted Fusion Positioning Method for USVs. Sensors 2023, 23, 1558. [Google Scholar] [CrossRef] [PubMed]
- Jiao, D.; Xiao, C.; Jianqiang, Z.; Zefang, L. Global Path Planning Algorithm for USV Based on IPSO-SA. In Proceedings of the 2019 Chinese Control And Decision Conference (CCDC), Nanchang, China, 3–5 June 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 2614–2619. [Google Scholar] [CrossRef]
- Yu, K.; Liang, X.; Li, M.; Chen, Z.; Yao, Y.; Li, X.; Zhao, Z.; Teng, Y. USV Path Planning Method with Velocity Variation and Global Optimisation Based on AIS Service Platform. Ocean Eng. 2021, 236, 109560. [Google Scholar] [CrossRef]
- He, S.; Dong, C.; Dai, S.-L. Adaptive Neural Formation Control for Underactuated Unmanned Surface Vehicles with Collision and Connectivity Constraints. Ocean Eng. 2021, 226, 108834. [Google Scholar] [CrossRef]
- Yang, X.; Shi, Y.; Liu, W.; Ye, H.; Zhong, W.; Xiang, Z. Global Path Planning Algorithm Based on Double DQN for Multi-Tasks Amphibious Unmanned Surface Vehicle. Ocean Eng. 2022, 266, 112809. [Google Scholar] [CrossRef]
- Lee, J.; Kang, H.; Choi, J.-H. A Study on the Improvement of USV’s Leader-Follower Swarm Control Algorithm through Fault Coping Algorithm. In Proceedings of the OCEANS 2023—Limerick, Limerick, Ireland, 5–8 June 2023; IEEE: Piscataway, NJ, USA, 2023; pp. 1–5. [Google Scholar] [CrossRef]
- Wang, Y.; Lu, C.; Wu, P.; Zhang, X. Path Planning for Unmanned Surface Vehicle Based on Improved Q-Learning Algorithm. Ocean Eng. 2024, 292, 116510. [Google Scholar] [CrossRef]
- Fan, Z.; Li, H. Two-Layer Model Predictive Formation Control of Unmanned Surface Vehicle. In Proceedings of the 2017 Chinese Automation Congress (CAC), Jinan, China, 20–22 October 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 6002–6007. [Google Scholar] [CrossRef]
- Xia, G.; Han, Z.; Zhao, B. Local Path Planning for USV Based on Improved Quantum Particle Swarm Optimization. In Proceedings of the 2019 Chinese Automation Congress (CAC), Hangzhou, China, 22–24 November 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 714–719. [Google Scholar] [CrossRef]
- Ghommam, J.; Saad, M.; Mnif, F.; Zhu, Q.M. Guaranteed Performance Design for Formation Tracking and Collision Avoidance of Multiple USVs with Disturbances and Unmodeled Dynamics. IEEE Syst. J. 2021, 15, 4346–4357. [Google Scholar] [CrossRef]
- Hu, B.-B.; Zhang, H.-T.; Liu, B.; Meng, H.; Chen, G. Distributed Surrounding Control of Multiple Unmanned Surface Vessels with Varying Interconnection Topologies. IEEE Trans. Contr. Syst. Technol. 2022, 30, 400–407. [Google Scholar] [CrossRef]
- Qu, Y.; Zhao, W.; Yu, Z.; Xiao, B. Distributed Prescribed Performance Containment Control for Unmanned Surface Vehicles Based on Disturbance Observer. ISA Trans. 2022, 125, 699–706. [Google Scholar] [CrossRef]
- Pan, C.; Peng, Z.; Liu, L.; Wang, D. Data-Driven Distributed Formation Control of under-Actuated Unmanned Surface Vehicles with Collision Avoidance via Model-Based Deep Reinforcement Learning. Ocean Eng. 2023, 267, 113166. [Google Scholar] [CrossRef]
- Chen, Z.; Sun, Y.; Li, J.; Liu, M. Distributed Fault-Tolerant Pinning Control for Cluster Synchronization of Multiple Unmanned Surface Vehicles. Ocean Eng. 2024, 296, 116882. [Google Scholar] [CrossRef]
- Liu, H.; Huang, H.; Tian, X.; Zhang, J. Distributed Fixed-Time Formation Control for UAV-USV Multiagent Systems Based on the FEWNN with Prescribed Performance. Ocean Eng. 2025, 328, 120996. [Google Scholar] [CrossRef]
- Jiang, Y.; Wang, F.; Yu, H.; Guo, C.; Liu, Z. Adaptive Prescribed-Time Containment Control for Multiple Unmanned Surface Vehicles with Uncertain Dynamics and Actuator Dead-Zones. Ocean Eng. 2023, 289, 116269. [Google Scholar] [CrossRef]
- Wang, Y.; Qu, Y.; Zhao, S.; Fu, H. Adaptive Neural Containment Maneuvering of Underactuated Surface Vehicles with Prescribed Performance and Collision Avoidance. Ocean Eng. 2024, 297, 116779. [Google Scholar] [CrossRef]
- Wang, D.; Chen, H.; Lao, S.; Drew, S. Efficient Path Planning and Dynamic Obstacle Avoidance in Edge for Safe Navigation of USV. IEEE Internet Things J. 2024, 11, 10084–10094. [Google Scholar] [CrossRef]
- Liu, K.; Ding, S.; Yan, L.; Sun, J.; Wu, S.; Han, S.; Li, F.; Zhou, L. COLREGs-Compliant Autonomous Collision Avoidance and Improved Adaptive LOS-Based Motion Control for USVs in Complex Waters. Ocean Eng. 2025, 318, 120127. [Google Scholar] [CrossRef]
- Li, J.; Zhang, G.; Shan, Q.; Zhang, W. A Novel Cooperative Design for USV–UAV Systems: 3-D Mapping Guidance and Adaptive Fuzzy Control. IEEE Trans. Control Netw. Syst. 2023, 10, 564–574. [Google Scholar] [CrossRef]
- Li, J.; Zhang, G.; Zhang, W.; Shan, Q.; Zhang, W. Cooperative Path Following Control of USV-UAVs Considering Low Design Complexity and Command Transmission Requirements. IEEE Trans. Intell. Veh. 2024, 9, 715–724. [Google Scholar] [CrossRef]
- Li, J.; Zhang, G.; Zhang, X.; Zhang, W. Integrating Dynamic Event-Triggered and Sensor-Tolerant Control: Application to USV-UAVs Cooperative Formation System for Maritime Parallel Search. IEEE Trans. Intell. Transp. Syst. 2023, 25, 3986–3998. [Google Scholar] [CrossRef]
- Lou, M.; Yang, X.; Hu, J.; Wang, Q. Energy-Saving Path Planning Method for Unmanned Surface Vehicles Based on Curiosity-Driven Reinforcement Learning. In Proceedings of the 2024 International Conference on Cyber-Physical Social Intelligence (ICCSI), Doha, Qatar, 8 November 2024; IEEE: Piscataway, NJ, USA, 2024; pp. 1–6. Available online: https://ieeexplore.ieee.org/document/10799486 (accessed on 13 March 2025).
- Wang, H.; Tan, H.; Peng, Z. Quantized Communications in Containment Maneuvering for Output Constrained Marine Surface Vehicles: Theory and Experiment. IEEE Trans. Ind. Electron. 2024, 71, 880–889. [Google Scholar] [CrossRef]
- Namgung, H.; Kim, J.-S. Collision Risk Inference System for Maritime Autonomous Surface Ships Using COLREGs Rules Compliant Collision Avoidance. IEEE Access 2021, 9, 7823–7835. [Google Scholar] [CrossRef]
- Iovino, S.; Savvaris, A.; Tsourdos, A. Experimental Testing of a Path Manager for Unmanned Surface Vehicles in Survey Missions. IFAC-Pap. 2018, 51, 226–231. [Google Scholar] [CrossRef]
- Dong, C.; Li, X.; Chen, X.; Jin, J.; Huang, C. Recent Progress of Marine Survey Unmanned Surface Vehicle in China. Mar. Technol. Soc. J. 2019, 53, 23–29. [Google Scholar] [CrossRef]
- Sanchez, P.J.B.; Márquez, F.P.G.; Govindara, S.; But, A.; Sportich, B.; Marini, S.; Jantara, V.; Papaelias, M. Use of UIoT for Offshore Surveys Through Autonomous Vehicles. Pol. Marit. Res. 2021, 28, 175–189. [Google Scholar] [CrossRef]
- Panetta, C.J. Network of Unmanned Surface Vehicles: Design and Application to Target Tracking. Master’s Thesis, Michigan State University, East Lansing, MI, USA, 2021. [Google Scholar] [CrossRef]
- De Robertis, A.; Levine, M.; Lauffenburger, N.; Honkalehto, T.; Ianelli, J.; Monnahan, C.C.; Towler, R.; Jones, D.; Stienessen, S.; McKelvey, D. Uncrewed Surface Vehicle (USV) Survey of Walleye Pollock, Gadus chalcogrammus, in Response to the Cancellation of Ship-Based Surveys. ICES J. Mar. Sci. 2021, 78, 2797–2808. [Google Scholar] [CrossRef]
- Liu, T.; Zhou, B. Dual-Channel and Two-Stage Dehazing Network for Promoting Ship Detection in Visual Perception System. Math. Probl. Eng. 2022, 2022, 8998743. [Google Scholar] [CrossRef]
- Pairet, È.; Spanò, S.; Mankovskii, N.; Pellegrino, P.; Zhilin, I.; Nicola, J.; Gala, F.L.; Masi, G.D. Nukhada USV: A Robot for Autonomous Surveying and Support to Underwater Operations. In Proceedings of the OCEANS 2022—Chennai, Chennai, India, 21–24 February 2022; pp. 1–6. [Google Scholar] [CrossRef]
- Handegard, N.O.; De Robertis, A.; Holmin, A.J.; Johnsen, E.; Lawrence, J.; Le Bouffant, N.; O’Driscoll, R.; Peddie, D.; Pedersen, G.; Priou, P.; et al. Uncrewed Surface Vehicles (USVs) as Platforms for Fisheries and Plankton Acoustics. ICES J. Mar. Sci. 2024, 81, 1712–1723. [Google Scholar] [CrossRef]
- Zhao, L.; Bai, Y.; Paik, J.K. Optimal Coverage Path Planning for USV-Assisted Coastal Bathymetric Survey: Models, Solutions, and Lake Trials. Ocean Eng. 2024, 296, 116921. [Google Scholar] [CrossRef]
- Gao, C.; Guo, Y.; Zhong, M.; Liang, X.; Wang, H.; Yi, H. Reliability Analysis Based on Dynamic Bayesian Networks: A Case Study of an Unmanned Surface Vessel. Ocean Eng. 2021, 240, 109970. [Google Scholar] [CrossRef]
- Douguet, R.; Heller, D.; Laurent, J. Multimodal Perception for Obstacle Detection for Flying Boats—Unmanned Surface Vehicle (USV). In Proceedings of the OCEANS 2023—Limerick, Limerick, Ireland, 5–8 June 2023; IEEE: Piscataway, NJ, USA, 2023; pp. 1–8. [Google Scholar]
- Constantinoiu, L.-F.; Bernardino, M.; Rusu, E. Autonomous Shallow Water Hydrographic Survey Using a Proto-Type USV. J. Mar. Sci. Eng. 2023, 11, 799. [Google Scholar] [CrossRef]
- Marchel, Ł.; Specht, C.; Specht, M. Assessment of the Steering Precision of a Hydrographic USV along Sounding Profiles Using a High-Precision GNSS RTK Receiver Supported Autopilot. Energies 2020, 13, 5637. [Google Scholar] [CrossRef]
- Jeong, S.-K.; Ji, D.-H.; Oh, J.-Y.; Seo, J.-M.; Choi, H.-S. Disturbance Learning Controller Design for Unmanned Surface Vehicle Using LSTM Technique of Recurrent Neural Network. J. Intell. Fuzzy Syst. 2021, 40, 8001–8011. [Google Scholar] [CrossRef]
- Shi, B.; Cao, T.; Han, H.; Xu, Z.; Wang, Z.; Ge, Q. An Intelligence Enhancement Method for USV Navigation Visual Measurement Based on Variable Gradient Soft-Threshold Correction. Measurement 2025, 242, 116201. [Google Scholar] [CrossRef]
- Huang, T.; Xue, Y.; Xue, Z.; Zhang, Z.; Miao, Z.; Liu, Y. USV-Tracker: A Novel USV Tracking System for Surface Investigation with Limited Resources. Ocean Eng. 2024, 312, 119196. [Google Scholar] [CrossRef]
- Sun, X.; Liu, T.; Yu, X.; Pang, B. Unmanned Surface Vessel Visual Object Detection Under All-Weather Conditions with Optimized Feature Fusion Network in YOLOv4. J. Intell. Robot. Syst. 2021, 103, 55. [Google Scholar] [CrossRef]
- Wang, P.; Liu, R.; Tian, X.; Zhang, X.; Qiao, L.; Wang, Y. Obstacle Avoidance for Environmentally-Driven USVs Based on Deep Reinforcement Learning in Large-Scale Uncertain Environments. Ocean Eng. 2023, 270, 113670. [Google Scholar] [CrossRef]
- Cheng, C.; Liu, D.; Du, J.-H.; Li, Y.-Z. Research on Visual Perception for Coordinated Air–Sea through a Cooperative USV-UAV System. J. Mar. Sci. Eng. 2023, 11, 1978. [Google Scholar] [CrossRef]
- Li, Y.; Wang, Y.; Xie, J.; Xu, C.; Zhang, K. Target Detection on Water Surfaces Using Fusion of Camera and LiDAR Based Information. Comput. Mater. Contin. 2024, 80, 467–486. [Google Scholar] [CrossRef]
- Yin, M.; Zhao, Y.; Li, F.; Liu, B.; Yang, C.; Gui, W. Collision Avoidance Control for Limited Perception Unmanned Surface Vehicle Swarm Based on Proximal Policy Optimization. J. Frankl. Inst. 2024, 361, 106709. [Google Scholar] [CrossRef]
- Li, F.; Yin, M.; Wang, T.; Huang, T.; Yang, C.; Gui, W. Distributed Pursuit-Evasion Game of Limited Perception USV Swarm Based on Multiagent Proximal Policy Optimization. IEEE Trans. Syst. Man Cybern. Syst. 2024, 54, 6435–6446. [Google Scholar] [CrossRef]
- Liu, H.; Nie, J.; Liu, Y.; Wu, Y.; Wang, H.; Qu, F.; Liu, W.; Li, Y. A Multi-Modality Sensor System for Unmanned Surface Vehicle. Neural Process. Lett. 2020, 52, 977–992. [Google Scholar] [CrossRef]
- Sun, P.; Yang, C.; Zhou, X.; Wang, W. Path Planning for Unmanned Surface Vehicles with Strong Generalization Ability Based on Improved Proximal Policy Optimization. Sensors 2023, 23, 8864. [Google Scholar] [CrossRef] [PubMed]
- Fan, Z.; Wang, L.; Meng, H.; Yang, C. Data-Based Deep Reinforcement Learning and Active FTC for Unmanned Surface Vehicles. J. Frankl. Inst. 2024, 361, 106960. [Google Scholar] [CrossRef]
- Xu, H.; Zhang, X.; He, J.; Yu, Y.; Cheng, Y. Real-Time Volumetric Perception for Unmanned Surface Vehicles Through Fusion of Radar and Camera. IEEE Trans. Instrum. Meas. 2024, 73, 5015912. [Google Scholar] [CrossRef]
- Gill, S.S.; Golec, M.; Hu, J.; Xu, M.; Du, J.; Wu, H.; Walia, G.K.; Murugesan, S.S.; Ali, B.; Kumar, M.; et al. Edge AI: A Taxonomy, Systematic Review and Future Directions. Clust. Comput. 2025, 28, 18. [Google Scholar] [CrossRef]
- Golec, M.; Gill, S.S.; Cuadrado, F.; Parlikad, A.K.; Xu, M.; Wu, H.; Uhlig, S. ATOM: AI-Powered Sustainable Resource Management for Serverless Edge Computing Environments. IEEE Trans. Sustain. Comput. 2024, 9, 817–829. [Google Scholar] [CrossRef]



| Reference | Methods | Scenario | Indicators | Results | Merit | Limitations |
|---|---|---|---|---|---|---|
| [9] | Modeling + partial field test | Simulation + lake test | Comm. quality, signal strength, channel gain | Adaptable to USV acoustics | Adaptable to USV acoustics | Only shallow water; complex conditions not covered |
| [11] | Adaptive sliding mode + observer | Simulation (multi-AUV formation) | Formation error, convergence speed | Fast convergence, error < 0.2 | Robust under disturbance | Only simulation; lacks sea test; idealized model |
| [12] | Power control + game theory | Simulation only | Link utility, eavesdropping rate, power efficiency | Utility +23%, leakage ↓ to 3%, power use +18% | Proactive anti-leak | Ideal channels; no delay/power analysis |
| [13] | Dueling DQN trajectory optimization | Simulation (multi-USV comm.) | Throughput, power control | Throughput +28%, better anti-jamming | Power/path optimized | Sim only; no real underwater tests |
| [14] | ME device design + perf. test | Air + simulated water | Comm. range, freq. response, signal strength | Up to 30 m, stable freq. response | Mini, low-power | Needs real ocean testing |
| [15] | Inverse design (multi-objective) | Sim + water pool test | Pressure distrib., transmission efficiency | Pressure +10 dB, efficiency +20% | Precise OAM beam | Complex design; limited adaptability |
| [16] | Lit. review + algorithm classification | No real test (theoretical) | Accuracy, robustness | Max 95% recognition (5-year summary) | Improves HRI | Lacks quantitative/practical analysis |
| [17] | Tech review + std. comparison | No direct test | Speed, power, link length | 800+ Gbps, lower energy use | Network planning | Uncertain tech path |
| [18] | Field study + energy eval | Arabian Gulf field test | Endurance, data rate | >48 h endurance per mission | Zero-emission patrol | Weather-dependent; limited flexibility |
| [19] | DDPG + simulation | Underwater optical sim | SNR, BER, beam offset | SNR +15%, BER ↓ | DRL enhances link | Idealized sim; no noise factors |
| Reference | Method | Scenario | Indicators | Results | Merit | Limitations |
|---|---|---|---|---|---|---|
| [43] | FBLS + Wavelet + SVM | GPS loss sim & test | IMU/GPS error | RMS ↓ 56–82% | Robust low-GPS navigation | Weak in turns, data-dependent |
| [44] | RTS + GRU fusion | Blocked & open sea sim | Pos./Speed error | Pos. error ↓ 44.7% | GRU-assisted robust navigation | Complex model, real-time unverified |
| [45] | RTK-GNSS/INS | Lake Kłodno survey | Pos./Att. error | <0.941 m pos., <0.1° att. | RTK-validated survey precision | Signal blocking untested |
| [46] | TFMS + MPC | Multi-target sim | Safety dist., path dev. | 94% success, <0.5 m error | Global-local hybrid planning | Ideal sim, no comm constraints |
| [47] | Dist. RL | No prior sim | Safety, smoothness, energy | 98% avoid rate | Risk-aware robust planning | No sea test, costly training |
| [48] | RRT + frontier | Virtual waters | Eff., collision rate | 2× efficiency | Hierarchical efficient search | No dynamics, sea states |
| [49] | MADDPG | 2–4 USVs, OpenAI sim | Conv. speed, coll., comm. | ↓ 30% coll., ↑ 20% alloc. | Joint area-path optimization | No delay model, no sea test |
| [50] | Decentralized factor graph | 3 USVs dynamic | Localization error | 0.13–0.28 m | Decentralized cluster localization | Unverified for large teams |
| [51] | Guided multi-agent RL | Obstacle sim | Success rate, time | 94.6% success, ↓ 21% time | Heuristic-guided target pursuit | Delay/fault tolerance unassessed |
| [52] | SM + TOD protocol | Net-limited sim | Error range, collision | ↓ 30% collision | TOD-scheduled bounded estimation | Protocol scope limited |
| [53] | Improved SM filter | Bandwidth/attack sim | Error, convergence | Conv. < 0.4 s | BCS-based resilient estimation | No sea test, energy not eval. |
| [54] | Faster R-CNN | Coastal test | Detection accuracy | ↑ small target detect. | Onboard deep object detection | View/sample limits |
| [55] | DQN + LSTM | Unity sim | Conv. speed, range | ↑ 30% conv., ↑ 25% nav. | LSTM-enhanced partial observability | No field validation |
| [56] | ShorelineNet | MODD2 dataset | F-score, FPS | 73.1%, 25 fps | Real-time shoreline detection | Light/weather sensitive |
| [57] | Deep tracking | MOOS-IvP sim | Trajectory error | ↓ 19% error | DNN-enhanced tracking accuracy | No field test |
| [58] | ResNet + DenseNet | Custom & public data | Detection rate | ↑ detection in waves | Multiscale feature fusion | Small dataset |
| [59] | GAN + YOLOv5 | MBZIRC sim | Detection, error | ↑ 28% detect, ↓ 34% error | GAN-based visibility enhancement | No dynamic obstacle test |
| [60] | WaSR + IMU | MaSTr1325 + MODD2 | F-measure, FPS | ↑ 14%, 10 fps | IMU-vision fusion segmentation | Limited environment adapt. |
| [61] | FRN | 3 ocean datasets | MIoU, MPA | 97.01%, 98.37% | Lightweight multi-feature fusion | Wake confusion errors |
| [62] | DWA + Decision Tree | Dynamic sim | Avoid rate, response | ↑ local adaptivity | Classifier-driven path tuning | No sea trial |
| Reference | Method | Scenario | Indicators | Results | Merit | Limitations |
|---|---|---|---|---|---|---|
| [65] | DDQN | Small sim | ↑ Succ, ↓ Len, ↓ Time | ↑ Path adaptivity vs. DQN/A*/RRT | Hybrid swarm optimization | No sea test |
| [66] | VV-A* | AIS sim | ↓ Len, ↓ Energy, ↓ Time | ↑ Long-range path quality | AIS-guided global planning | ~AIS quality |
| [67] | ANN | Multi-USV sim | ↓ Track err | ↑ Formation, no collision | Sensor-based formation | Delay not tested |
| [68] | L-F + FT | Sim | ↓ Recovery time | ↑ Stability | Multi-task DDQN planning | No sea env |
| [69] | NSFQ-RBF | Sim | ↓ Conv, ↓ Time | ↑ Smooth, short nav | Leader failure recovery | No sea test |
| [71] | MPC | Dyn/static sim | ↓ Track err | ↑ Efficient, less compute | Hierarchical MPC coordination | Simple env |
| [72] | IQPSO + VO | Obstacle sim | ↑ Avoid rate | ↑ Local avoid | Quantum-enhanced optimization | No field test |
| [73] | Coll.-aware | Obst. sim | ↓ Track err | ↑ Collision-free | Robust dual-layer tracking | Simplified model |
| [74] | Topo-Adap. | Net sim | ↑ Accuracy | +10% prec. | Surrounding adaptive coordination | No pkt loss |
| [75] | Obsrv. + Perf | Formation sim | ↓ Err, ↑ Conv. | ↑ Rejection | Disturbance-aware control | No real test |
| [76] | DRL | Multi-USV sim | ↓ Form err | ↑ 15% acc | Model-free formation | ↑ Train cost, no delay |
| [77] | Pinning | Fault sim | ↓ Sync err | ↑ >90% recovery | Fault-tolerant clustering | No fault inject |
| [78] | Hetero | Sim | ↓ Time, ↓ Err | ↑ Fixed-time ctrl | Heterogeneous fixed-time control | ~Delay tolerant |
| [79] | Presc. + DZ | Sim | Conv < 20 s, ↓ Energy | ↑ Fast, robust | Low-bandwidth robustness | Ideal sim |
| [80] | ANN + Perf | Group sim | Err < 0.5 m,<40 s | ↑ Interf. tolerant | Collision-aware containment | Delay/ft? |
| [81] | Edge + COLREGs | Dynamic sim | ↑ Succ, ↓ Coll. | ↑ Real-time safety | Edge-assisted avoidance | No sea test |
| [82] | NMPC | Multi-sim | ↓ Dev, ↑ Avoid | ↑ Autonomy | DT-guided path reconstruction | Multi-ship weak |
| [83] | 3DMap + Fuzzy | Mixed UAV-USV sim | ↑ Track acc | ↑ Boundedness | Hetero fuzzy guidance | No field test |
| [84] | DET + L-rule | UAV-USV sim | ↓ Command | ↑ Stability | Low-transmit path ctrl | Idealized comm. |
| [85] | DET + SensorTol | Search sim | ↑ Tracking | ↑ Fault-tolerant | Robust fault adaptivity | No real platform |
| [86] | ICM-DDPG | Currents sim | ↓ Energy | ↑ Path eff. | Curiosity-guided planning | Only sim verified |
| [87] | LOS + Quant | MSV sim/exp | ↑ Track conv. | ↓ Comms | Quantized coop ctrl | Only 2-leader |
| [88] | ANFIS | MATLAB sim | ↑ Early warn | ↑ Compliance | Fuzzy COLREGs compliance | No sea test |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lv, Z.; Wang, X.; Wang, G.; Xing, X.; Lv, C.; Yu, F. Unmanned Surface Vessels in Marine Surveillance and Management: Advances in Communication, Navigation, Control, and Data-Driven Research. J. Mar. Sci. Eng. 2025, 13, 969. https://doi.org/10.3390/jmse13050969
Lv Z, Wang X, Wang G, Xing X, Lv C, Yu F. Unmanned Surface Vessels in Marine Surveillance and Management: Advances in Communication, Navigation, Control, and Data-Driven Research. Journal of Marine Science and Engineering. 2025; 13(5):969. https://doi.org/10.3390/jmse13050969
Chicago/Turabian StyleLv, Zhichao, Xiangyu Wang, Gang Wang, Xuefei Xing, Chenlong Lv, and Fei Yu. 2025. "Unmanned Surface Vessels in Marine Surveillance and Management: Advances in Communication, Navigation, Control, and Data-Driven Research" Journal of Marine Science and Engineering 13, no. 5: 969. https://doi.org/10.3390/jmse13050969
APA StyleLv, Z., Wang, X., Wang, G., Xing, X., Lv, C., & Yu, F. (2025). Unmanned Surface Vessels in Marine Surveillance and Management: Advances in Communication, Navigation, Control, and Data-Driven Research. Journal of Marine Science and Engineering, 13(5), 969. https://doi.org/10.3390/jmse13050969