Abstract
Unmanned Surface Vehicles (USVs) have emerged as vital tools in marine monitoring and management due to their high efficiency, low cost, and flexible deployment capabilities. This paper presents a systematic review focusing on four core areas of USV applications: communication networking, navigation, control, and data-driven operations. First, the characteristics and challenges of acoustic, electromagnetic, and optical communication methods for USV networking are analyzed, with an emphasis on the future trend toward multimodal communication integration. Second, a comprehensive review of global navigation, local navigation, cooperative navigation, and autonomous navigation technologies is provided, highlighting their applications and limitations in complex environments. Third, the evolution of USV control systems is examined, covering group control, distributed control, and adaptive control, with particular attention given to fault tolerance, delay compensation, and energy optimization. Finally, the application of USVs in data-driven marine tasks is summarized, including multi-sensor fusion, real-time perception, and autonomous decision-making mechanisms. This study aims to reveal the interaction and coordination mechanisms among communication, navigation, control, and data-driven operations from a system integration perspective, providing insights and guidance for the intelligent operations and comprehensive applications of USVs in marine environments.
1. Introduction
The oceans play a vital role in the Earth’s ecosystem, representing not only the largest ecosystem on the planet but also providing essential resources and ecological services to humankind, such as climate regulation, food supply, and biodiversity conservation [1,2]. However, increasing human activities and the impacts of climate change have posed unprecedented challenges to the marine environment. Ocean monitoring and management both involve the dynamic observation of the marine environment, ecology, and resources through technical means, combined with scientific planning and regulatory oversight to guide the development and utilization of marine areas. The ultimate goal is to achieve ecological protection and sustainable development. As such, both effective monitoring and management of the oceans have become increasingly critical.
Marine communications play a critical role in ocean monitoring and management. Effective communication ensures real-time data transmission and sharing, thereby enhancing the efficiency and accuracy of ocean observations [3]. Furthermore, navigation and control are essential for accomplishing complex maritime tasks. Through efficient navigation and control, resource utilization can be optimized and task execution efficiency can be improved [4,5]. Ocean data-driven tasks involve integrating multi-source data to obtain a more comprehensive understanding of the marine environment, which is crucial for improving the accuracy and reliability of marine monitoring [6,7].
From a systems integration perspective, communication, navigation, control, and data-driven operations are not independent but form a tightly coupled closed-loop system. First, the communication system not only handles telemetry and remote command transmission but also provides real-time environmental perception and multi-node collaborative network support for navigation, enabling continuous updates to trajectory planning in dynamic channel environments. Based on this, the navigation system optimizes path constraints and heading errors jointly by receiving spatiotemporal data from multi-source sensors and communication link status information. Next, the control system integrates navigation outputs and online sensor feedback within the closed-loop process. By combining the environmental models and prediction results generated by the data-driven layer, the control system adapts the propulsion and rudder actions, ensuring robust control of the USV in complex sea conditions. Finally, the data-driven system conducts deep-learning and statistical analysis on historical telemetry data, navigation logs, and control execution records transmitted via the communication link, feeding back into communication link optimization and self-learning control parameters, thus enhancing the overall task execution efficiency and reliability. An illustration of the integrated operation scenario of USVs in the ocean is shown in Figure 1.
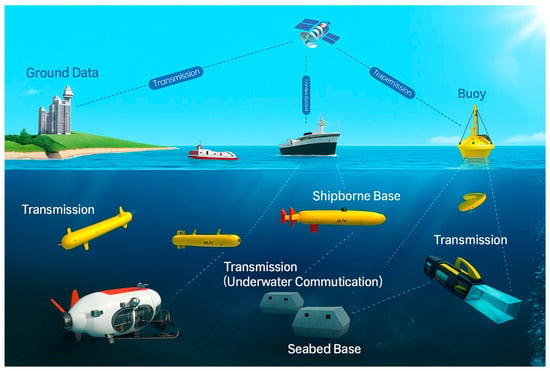
Figure 1.
USV integrated networking operation scenario diagram.
Unmanned surface vehicles are flexible and efficient tools for marine observation, capable of performing a variety of tasks in complex marine environments. While a single USV may have limited performance, the collaborative operation of a USV fleet can significantly enhance the efficiency and observational capabilities of ocean tasks [8]. The application of USVs not only strengthens marine communication capabilities but also optimizes task execution through intelligent task allocation and path planning [4,5,6]. Furthermore, USVs play a crucial role in data-driven tasks, where the collaborative operation of multiple USVs enables more efficient data collection and processing [7].
This paper focuses on Unmanned Surface Vehicles (USVs) and analyzes the progress and system integration characteristics of USVs in four key areas: communication, navigation, control, and data-driven operations. The operational system of a USV (communication, navigation, and control) is closely linked to its data-driven tasks, and together they form an inseparable unified research theme in marine monitoring and management. Therefore, this paper provides a comprehensive review of the current development status and future trends of the technologies in each subsystem, considering both the overall operational capabilities of the USV and its environmental information perception. The aim is to provide systematic support and theoretical reference for the intelligent application of USVs. This paper is divided into six sections. Section 1 introduces the importance of unmanned surface vehicles in marine monitoring and management and introduces the research topic. Section 2 presents different communication networking methods, protocols, and topologies, with a focus on comparing the advantages and disadvantages of each communication method. Section 3 discusses the importance and specific applications of navigation tasks, providing a detailed comparative analysis. Section 4 covers the classification and significance of control tasks, along with a detailed comparison. Section 5 presents the data fusion observation strategy. Section 6 provides a summary and suggestions. The Appendix A shows a list of acronyms, as shown in Table A1.
2. Communication Networking
Communication networking refers to an information transmission and collaboration network established among multiple USVs using wireless communication technologies. This network enables real-time data sharing, task coordination, and path planning between clusters, ensuring collaborative operations and efficient task completion.
2.1. Communication Methods
The communication methods of USV networking can be mainly divided into three types: acoustic communication, electromagnetic wave communication, and optical communication. Acoustic communication refers to the technology that uses underwater sound waves to transmit information. It is widely applied in marine environments and has become an important research direction, particularly in long-distance transmission and low-frequency signal processing [9,10]. In 2018, Lv et al. from Harbin Engineering University proposed a USV-based underwater acoustic communication quality assessment model while studying the integration of USV acoustic modems as nodes in underwater acoustic communication networks [9]. In 2022, Li et al. from the Intelligent Robotics Research Division of the Korea Institute of Robotics and Technology Fusion built a star-topology acoustic communication network centered around USVs [11]. In 2023, Hu et al. from Shanghai University proposed a USV-assisted underwater wireless acoustic network data security collection scheme to ensure secure data acquisition [12]. In 2024, Zhang et al. from Southeast University addressed remote communication issues in underwater wireless networks by proposing a dual-deep Q-network-based algorithm. This algorithm further analyzed the convergence speed and stability of the final strategy of the D2QN-JTP algorithm under varying interference levels and network latency conditions, aimed at jointly optimizing the USV’s trajectory and transmission power, effectively mitigating malicious underwater interference attacks and maximizing achievable end-to-end throughput [13]. These studies focus on communication quality, data security, topology optimization, and anti-jamming capabilities to improve the efficiency and reliability of underwater wireless networks, promoting collaborative operations of USVs in complex environments.
Electromagnetic communication refers to the use of radio waves for data transmission and is widely applied in surface and aerial environments. Integrating EM communication into USV systems enables efficient information exchange, remote control, and real-time monitoring, thereby enhancing the autonomous navigation and collaborative operational capabilities of USVs. Current research primarily focuses on improving signal stability and reducing maritime interference. In 2023, Zi et al. from Northwestern Polytechnical University designed a miniaturized low-frequency communication system based on the magnetoelectric effect, including both transmission and reception devices. Operating at a frequency of 44.75 kHz with a bandwidth of 1.1 kHz, the system required an input voltage of 150 V and achieved an effective communication distance of up to 16 m in air. Under simulated seawater conditions (25 °C, salinity of 35%), the received signal distance reached 1 m [14]. The test scenario for this communication system is shown in Figure 2. In the same year, He et al. from Beijing Engineering Technology Research Institute proposed an anti-design strategy and systematically constructed a monophase underwater metasurface, which provides a potential solution for underwater acoustic communication [15]. In 2024, Hozyn from the Polish Naval Academy addressed the issue of electromagnetic wave attenuation by utilizing deep-learning algorithms to improve the efficiency and reliability of communication network collaboration [16]. In USV communication networks, the underwater transmission performance of electromagnetic waves is poor, with significant signal attenuation, especially in deep water and complex environments, leading to short communication distances and unstable signals. This limits the widespread application of electromagnetic wave communication in marine environments, resulting in limited research in this area.
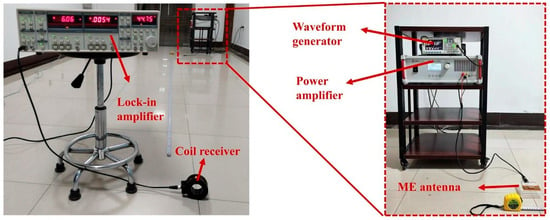
Figure 2.
Test scenario for low-frequency communication systems in the air developed by Northwestern Polytechnical University (Zi et al., 2023) [14].
In contrast, optical communication, as an emerging technology, has gradually become a research hotspot due to its high speed and large bandwidth characteristics [17]. Optical communication refers to the technology of using light waves to transmit high-speed data through free space. Integrating optical communication into USV systems enables rapid information exchange in short-range, high-bandwidth scenarios, enhancing autonomous operations and fine-scale monitoring capabilities. In 2022, Julie et al. from Open Ocean Robotics in Canada equipped a sensor suite during satellite and cellular communication experiments to monitor the environment and detect marine mammals and vessels. The sensor suite included oceanographic and meteorological sensors, optical and thermal cameras, an AIS transponder, and a towed acoustic array, enabling the provision of real-time data to ground observers [18]. In 2024, Shin et al. from the Korea Institute of Ocean Science and Technology studied learning-assisted beam alignment adaptive control, achieving optical beam alignment between unmanned systems and USVs [19]. Future research will focus on integrating different communication methods and developing multimodal, collaboratively optimized communication technologies to enhance the overall performance of USV networks and their adaptability to complex marine environments.
Based on the research findings of acoustic, electromagnetic, and optical communications in USV networks, further critical comparison and synthesis are needed to enhance the feasibility and practicality of communication systems in diverse application scenarios. In terms of transmission performance, acoustic communication is suitable for medium to long-range transmission, with good penetration and environmental robustness. However, it is limited by low bandwidth, slow rates, and high latency, making it more appropriate for low-speed, high-tolerance scenarios such as deep-sea surveying and long-duration collaborative cruising. Electromagnetic communication, while offering good real-time performance and system maturity in air, faces significant limitations in underwater propagation distance and signal stability. Therefore, it is more suitable for surface-to-air link construction and shore-based remote control, rather than pure underwater communication. In contrast, optical communication excels in short-range, high-bandwidth data transmission, enabling real-time transmission of high-speed images and sensor data. However, it is vulnerable to scattering, turbidity, and platform vibration in water, making it better suited for fine-scale observations in near-shore areas and short-range, high-speed interactions between USVs. The advantages and disadvantages of each communication method are summarized in Table 1.

Table 1.
Comparison of various communication methods.
2.2. Communication Protocols
Communication protocols in USV networking are generally categorized into three types: traditional hierarchical protocols, cooperative adaptive protocols, and cross-layer optimization protocols. Traditional hierarchical protocols are typically designed based on fixed-layer architectures, which struggle to cope with the highly dynamic conditions of marine environments—such as channel quality fluctuations and frequent topology changes. These limitations often result in poor resource utilization and lack of flexibility, making them inadequate for meeting the high reliability and adaptability requirements of modern USV networks [20,21].
Cooperative adaptive protocols refer to mechanisms that dynamically adjust communication strategies based on node status and environmental changes. Cooperative adaptive protocols have become a focal point of recent research, as they dynamically adjust communication parameters to accommodate the complex and variable nature of marine environments, thereby significantly improving network reliability and throughput. In 2018, Ali et al. from Mälardalen University in Sweden conducted a comprehensive analysis of major wireless communication technologies in the context of cooperative cyber-physical systems, highlighting protocol development efforts within specific standardization bodies [22]. In 2019, Henry from the Acoustic and Sonar Division of The Hague, Netherlands, introduced the European Defence Agency’s Smart Adaptive Long- and Short-Range Acoustic Networks project, which jointly developed a universal protocol stack for adaptive underwater acoustic communication and cognitive underwater networks [23]. In 2022, Hermans et al. from Florida Atlantic University (Boca Raton) implemented a dynamic mapping of specific signal processing operations within the acoustic communication stack to field-programmable gate arrays, while other operations were mapped to the embedded processing system of a modem-on-chip. They demonstrated that customized programmable logic could achieve a data rate of 2000 bps over distances of up to 50 m [24]. In the same year, Lu et al. from Dalian Maritime University developed a multi-edge cooperative control system for USVs with topological scalability under polymorphic networks and proposed a multi-edge distributed control protocol [25]. In 2023, Dai et al. from the University of Macau studied USV-assisted multiple access computation offloading in marine networking to address inefficiencies and latency caused by limited underwater energy supply and acoustic channel constraints [26]. Research on cooperative adaptive protocols focuses on dynamically adjusting communication parameters to adapt to complex marine environments, while integrating techniques such as distributed control and computation offloading to optimize network performance. These protocols enable USV clusters to autonomously respond to varying channel conditions, node mobility, and task-specific constraints, thereby maintaining stable communication links and minimizing energy consumption. Recent developments also emphasize the incorporation of learning-based decision-making mechanisms, allowing real-time adaptation to unpredictable marine dynamics.
Cross-layer optimization protocols refer to the approach of breaking traditional network layering constraints by collaboratively designing parameters across the physical, link, and network layers to optimize overall system performance. When applied to USV systems, these protocols can improve link adaptability, reduce communication latency, and enhance task execution capabilities in complex environments. In recent years, cross-layer optimization protocols have attracted growing research interest due to their advantages in multi-level resource scheduling and network performance enhancement [27,28]. Figure 3 illustrates the principles and architecture of cross-layer design, where (a) presents the design principles and (b) shows the architectural framework. In 2017, Dhongdi et al. from the Indian Institute of Technology developed a cross-layer protocol stack using a cross-layer design approach, demonstrating superior overall performance [29]. In 2021, Zhao et al. from Harbin Engineering University proposed a cross-layer-assisted opportunistic routing protocol to address the inefficiencies of traditional routing methods. The protocol significantly improved network performance under various traffic rates [21]. In 2024, Liu et al. from Qingdao University of Science and Technology proposed a cross-layer opportunistic routing protocol for underwater sensor networks based on multi-agent reinforcement learning. The protocol achieved a 13.2% improvement in convergence speed, a 25% reduction in network energy consumption, and a 31.2% decrease in network latency [30]. Cross-layer optimization protocols can significantly enhance the performance of underwater sensor networks. By integrating cross-layer design, opportunistic routing, and multi-agent reinforcement-learning techniques, these protocols greatly improve network efficiency, reduce energy consumption and latency, accelerate convergence speed, and optimize overall communication performance.
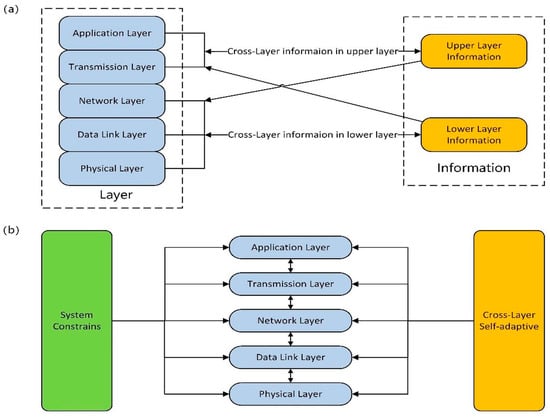
Figure 3.
Block diagram of principles and architecture of cross-tier design: (a) Principles of cross-tier design; (b) Architecture of cross-tier design (Li et al., 2016) [28].
Traditional hierarchical protocols offer clear structure but suffer from poor adaptability in dynamic sea conditions, making them inadequate for long-duration patrol tasks. Cooperative adaptive protocols dynamically adjust parameters based on node status and environmental changes, enhancing robustness and energy efficiency. These protocols are suitable for nearshore monitoring and distributed collaboration but require high local computational capabilities. Cross-layer optimization protocols optimize multiple communication parameters jointly, providing stronger performance scheduling in complex tasks. They are well-suited for dense cooperative tasks but are more complex in design. Overall, cooperative protocols offer strong adaptability, while cross-layer protocols excel in performance. Future research may integrate multi-agent learning and heterogeneous architectures to build task-driven hybrid communication frameworks.
2.3. Communication Topologies
Communication topologies in USV networks are generally categorized into three types: centralized, distributed, and hybrid. Each topology presents distinct advantages and challenges depending on the application scenario. Centralized topologies rely on a single control node to manage the network, offering simplicity and ease of deployment. However, their reliability is heavily dependent on the stability of the central node, making them vulnerable to node failures and dynamic changes in complex marine environments. In 2022, Lindsay et al. from Dalhousie University, Canada, proposed a cooperative system composed of unmanned aerial vehicles, unmanned underwater vehicles, and USVs, managed through a centralized topology [31]. In 2024, Yuan et al. from Zhejiang University developed a centralized cross-layer protocol to address the complexity of acoustic communication channels. This protocol improved network performance in terms of end-to-end latency, service rate, and energy consumption [32]. Related studies have primarily focused on cross-layer protocol design and cooperative architectures, effectively enhancing network performance metrics such as latency and service rate and improving system reliability in acoustic communication environments.
In contrast, distributed topologies offer decentralized control, enabling node collaboration and adaptive adjustment, which significantly enhance network reliability and flexibility. Such topologies are particularly well-suited for highly dynamic and robust marine scenarios [33,34]. In 2019, Sun et al. from Dalian Maritime University proposed a model predictive control method based on a finite control set, which adopted a leader–follower structure and a distributed control strategy [35]. Building on this framework, in 2022, Zhang et al. from the same university investigated an adaptive distributed fault-tolerant formation control scheme for underactuated USVs, incorporating an event-triggered bridge-to-bridge communication mechanism under directed topologies [36]. In the same year, Tan et al. from Harbin Engineering University developed a coordination control method for heterogeneous USV groups based on a distributed null-space behavior approach, addressing the challenge of multi-USV cooperation [37]. These studies primarily focus on adaptive control, fault tolerance, and heterogeneous collaboration, aiming to optimize multi-USV coordination and task execution in highly dynamic marine environments.
Hybrid topology structures have emerged as a growing research focus, as they combine the global management capabilities of centralized architectures with the high flexibility of distributed systems to optimize network performance and enhance overall system adaptability. This topology allows dynamic adjustments based on varying task requirements and environmental conditions, effectively balancing the efficiency of centralized control with the stability of distributed coordination. In 2020, Zhang et al. from Huazhong University of Science and Technology proposed a hybrid communication network architecture for multi-USV communication, integrating long-range communication technologies with wireless ad hoc networking [38]. In 2021, Shan et al. from Dalian Maritime University proposed a topology reconfiguration strategy for multi-USV containment control systems, based on algebraic connectivity. This strategy addressed the limitations of conventional algorithms when exposed to the impacts of complex marine environments [39]. In 2023, Dai et al. from the University of Macau introduced a hybrid sea–air multi-access edge computing scheme for ocean communication networks. Designed to cope with limited marine communication and computing resources, this scheme was deployed on USVs and other devices to improve the quality of service in marine applications [40].
Centralized topology is simple in design and easy to deploy, making it suitable for tasks with clear requirements and high control concentration, such as nearshore monitoring. However, it heavily relies on the central node and struggles to adapt to complex situations like frequent node disconnections or drastic changes in sea conditions. Distributed topology, on the other hand, enhances system robustness and dynamic responsiveness through inter-node collaboration. It is more suitable for tasks such as multi-USV coordinated search and dynamic formation, but there are delays and communication overheads in information consistency and path optimization. Hybrid topology attempts to strike a balance between centralized management and distributed collaboration, offering strong environmental adaptability and topology reconfigurability. It is suitable for complex tasks such as cross-domain collaboration and long-duration patrols. Existing research has proposed targeted strategies in collaborative control, event-triggered communication, topology reconfiguration, and edge computing resource scheduling. However, there is still a lack of quantitative trade-off analysis regarding multi-hop transmission stability, energy efficiency, and real-time performance. The future evolution of topology architectures should combine task requirements, communication link quality, and node heterogeneity, aiming to develop adaptive networking frameworks with resilient reconfiguration capabilities and end-to-end mechanisms to meet the high-reliability communication needs of marine unmanned systems in multi-task and multi-scenario environments.
In the analysis of communication systems, PHY/MAC layer constraints, multi-hop routing mechanisms, and adaptive bandwidth strategies are also important aspects to consider. In 2024, Chen et al. from the National University of Defense Technology incorporated issues such as link state variation, bandwidth limitations, and control overhead into the design of routing protocols. The protocols were categorized into topology-based, geographic information-based, and swarm-intelligence-based types. However, the discussion primarily focused on qualitative comparisons, with limited attention given to quantitative performance metrics such as link failure rate of multiple paths in highly dynamic node environments, rerouting overhead, latency increase, and energy consumption [41]. A typical communication networking innovation is shown in Figure 4.

Figure 4.
Innovations in communication networking: (a) Harbin Engineering University (Tan et al., 2022) [37]; (b) Dalhousie University, Canada (Lindsay et al., 2022) [31]; (c) Korea Institute of Marine Science and Technology (Shin et al., 2024) [19]; (d) Zhejiang University (Yuan et al., 2024) [32].
In practical USV systems, the communication and navigation modules do not operate independently but interact bidirectionally through dedicated networks and system-level buses to jointly support safe and reliable maritime operations. Based on this requirement, in 2019, H. Namgung et al. from the Korea Graduate School of Maritime Transportation Systems constructed an experimental scenario for a USV communication relay system according to different navigation phases. Navigation information was exchanged within a dedicated communication network via a maritime control station, and a series of communication experiments were conducted in the waters off Mokpo. The experiments demonstrated good Signal, Interference, Noise, Propagation, and Overall rating performance, laying a solid foundation for the further exploration of integrated communication and navigation systems [42].
3. Navigation
Navigation is the process of determining a vehicle’s position, heading, and motion parameters to ensure it travels from a starting point to a target destination along a predefined path. Navigation is generally categorized into four main types: global navigation, local navigation, cooperative navigation, and autonomous navigation.
3.1. Global Navigation
Global navigation refers to continuous high-precision positioning and path guidance enabled by technologies such as the Global Positioning System (GPS). When applied to USV systems, it ensures accurate pose estimation and dynamic trajectory planning over large operational areas, thereby enhancing the capability for long-range autonomous missions. In 2022, Wang et al. from Dalian Maritime University proposed a fuzzy generalized learning structure within an integrated Inertial Navigation System (INS) and global positioning system for USVs. The approach employed navigation data from both INS and GPS as inputs to a fuzzy generalized learning system to train the network, aiming to estimate optimal navigation solutions when GPS signals are obstructed [43]. Building on this work, in 2024, Lou et al. from Shanghai Maritime University proposed a robust integrated navigation optimization method to improve signal tracking capability [44]. In the same year, Specht from Gdynia Maritime University in Poland conducted parameter selection and Euler angle testing for an INS/GPS system applied to USV path positioning in inland hydrographic surveys [45]. These studies combined INS and GPS technologies and employed techniques such as generalized learning, robust integration, and navigation parameter optimization to improve positioning accuracy and signal tracking performance in signal-blocked or complex environments.
3.2. Local Navigation
Local navigation refers to the process of generating short-term obstacle avoidance paths in real time based on locally perceived information. When applied to USV systems, it enables effective obstacle avoidance and trajectory adjustment in complex and dynamic environments, thereby ensuring the safety and environmental adaptability of autonomous navigation. In 2022, Yu et al. from Dalian Maritime University proposed a collision avoidance strategy in which trajectory points from the globally planned path were used as local target points under the constraints of the USV’s local environment and dynamic model. This approach enabled the USV to independently and safely reach the final destination [46]. In 2023, Lin et al. from Stevens Institute of Technology in the United States proposed a local path planner based on distributional reinforcement learning to address sensor-based navigation challenges. The planner learns the return distribution to capture the uncertainty of action outcomes. Experimental results showed that, compared with traditional classical local planning methods, the proposed planner demonstrated greater robustness to environmental flow and generated trajectories with improved performance in terms of safety, time efficiency, and energy consumption [47]. In 2024, Song et al. from Dalian Maritime University addressed the problem of limited maneuverability during the exploration process by optimizing both the target detection points and feasible navigation routes. A hierarchical navigation method was implemented at the global level to plan appropriate navigation paths [48]. Currently, research in this area remains limited, indicating a need for further investigation in the future.
3.3. Collaborative Navigation
Cooperative navigation refers to the sharing of perception data and navigation decisions among multiple autonomous agents to achieve global path optimization and mutual localization. When applied to USV systems, it enhances cluster navigation accuracy, fault tolerance, and the overall efficiency of collaborative task execution. In 2022, Wen et al. from Dalian Maritime University proposed a cooperative navigation method that integrated dynamic navigation with regional task allocation [49]. In the same year, Liu et al. from Southeast University developed a factor-graph-based cooperative navigation algorithm by using onboard radar or electro-optical sensors to measure the relative distance and bearing between USVs. They also introduced a decentralized cooperative navigation system architecture to achieve high-precision collaborative localization of USV clusters [50]. In 2023, Nantogma et al. from the University of Electronic Science and Technology of China proposed a cooperative navigation approach that enabled multiple USVs to autonomously capture maneuvering targets while avoiding both static and dynamic obstacles [51]. However, the studies mentioned above lack sufficient consideration of indicators such as stability boundaries. To address this issue, Chen et al. from Guangdong University of Technology and Wang et al. from Qingdao Agricultural University both conducted in-depth research on recursive optimization algorithms to ensure that state estimation errors are controlled within an ellipsoidal range, thereby ensuring stability boundaries [52,53]. Through years of iterative development, cooperative navigation is advancing towards information sharing and relative positioning, integrating advanced technologies such as deep-reinforcement-learning and factor-graph algorithms. The aim is to enhance the positioning accuracy, target capture capability, and anti-jamming performance of the cluster, while also improving its adaptability and collaboration in complex environments.
3.4. Autonomous Navigation
Autonomous navigation refers to the system’s ability to independently perform environment understanding, path planning, and decision execution based on perceptual information. When applied to USV systems, it enables autonomous navigation and dynamic obstacle avoidance without external intervention, thereby improving operational continuity and environmental adaptability. In recent years, autonomous navigation technologies focusing on AI algorithms and multi-sensor fusion have flourished and attracted significant attention. In terms of multi-sensor fusion, in 2018, Chen et al. from the National University of Singapore utilized the Global Positioning System (GPS) and compass to collect data and information in coastal areas for navigation and positioning, equipping sensors for localization and applying autonomous navigation technologies and algorithms for navigation positioning [54]. Regarding AI algorithms, deep-learning-based approaches have been extensively studied, with other algorithms serving as supplementary methods. In 2021, Yan et al. from Anhui University of Technology, Yao et al. from University College London, and Sun et al. from Dalian Maritime University all applied deep-learning methods for USV autonomous navigation [55,56,57]. In 2020, Ma et al. from Harbin Institute of Technology proposed a bidirectional feature pyramid network architecture to achieve autonomous navigation for Unmanned Underwater Vehicles (UUVs) [58]. In 2023, Ahmed et al. from Khalifa University, UAE, introduced an autonomous vision-based navigation framework for target tracking in extreme marine conditions [59]. Regarding innovations in network structures, in 2020, Bovcon from the University of Ljubljana, Slovenia, addressed the issue of visual ambiguity in USV autonomous navigation by proposing a new deep encoder–decoder architecture, the Water Obstacle Separation and Refinement Network [60]. Building on this work, in 2022, Zhou et al. from Shanghai Maritime University proposed a fusion refinement network with an encoder–decoder structure to extract richer visual features and enhance USV autonomous navigation capabilities [61]. In 2025, Chen et al. from Guangdong University of Technology proposed a decision-tree-based Dynamic Window Approach (DWA) to address the obstacle avoidance strategy in autonomous navigation. The main objective of this algorithm is to integrate a decision tree classifier into the DWA while considering certain features that influence decision-making, enabling adaptive adjustment of weights [62].
The current development of USV navigation systems encompasses four main directions—global navigation, local navigation, collaborative navigation, and autonomous navigation—each with its own advantages and applicable scenarios. Global navigation relies on the fusion of GNSS and inertial navigation, making it suitable for long-duration remote patrol tasks. However, its positioning accuracy decreases in the presence of signal blockage or complex sea conditions, requiring robust learning and parameter optimization to enhance interference resistance. Local navigation emphasizes real-time obstacle avoidance and path fine-tuning, making it suitable for dynamic coastal operations. Although emerging distributed reinforcement-learning methods offer environmental adaptability, optimization is still needed in terms of stability and energy consumption control. Collaborative navigation improves positioning and fault tolerance through multi-vehicle information sharing. Its strengths lie in formation operations and coordinated sensing, but its system architecture is complex and highly dependent on communication and computational resources, requiring a trade-off between real-time performance and robustness. Autonomous navigation, combining multi-sensor fusion and AI algorithms, enables fully autonomous operation in the absence of external positioning information, providing high environmental adaptability. It is a key direction for future USV autonomous operations, although it demands high-quality model training and perception fusion accuracy. Overall, for long-duration, low-communication scenarios, a fusion of global and autonomous navigation is ideal, while local or collaborative strategies are more suited for nearshore dynamic tasks. Future research should focus on the switching mechanisms of task-driven navigation modes and multi-model fusion optimization.
In navigation systems, technologies such as Kalman filtering and SLAM play a critical role in addressing GPS denial and sensor degradation. In 2024, Akram et al. from United Arab Emirates University investigated this issue by employing UAV-assisted visual localization. Through field experiments and dynamic error control, they quantitatively evaluated the accuracy and robustness of vision-based localization. Their work provided clear insights and experimental evidence for improving positioning performance under sensor degradation scenarios, particularly GPS loss [63]. In the same year, Shen et al. from Shanghai Ocean University analyzed the performance degradation and compensation mechanisms of navigation systems under GPS-denied environments. They proposed a multi-sensor fusion localization method assisted by LiDAR-SLAM and conducted extensive experimental validation using quantitative metrics such as error reduction ratio, Root Mean Square Error (RMSE), and switching smoothness [64].
The above studies indicate that current research on sensor fusion-based navigation remains relatively limited, highlighting the need for further investigation in this area. Representative experimental scenarios for navigation testing are illustrated in Figure 5, and a comparison of the key innovations, advantages, and limitations of various navigation methods is summarized in Table 2.
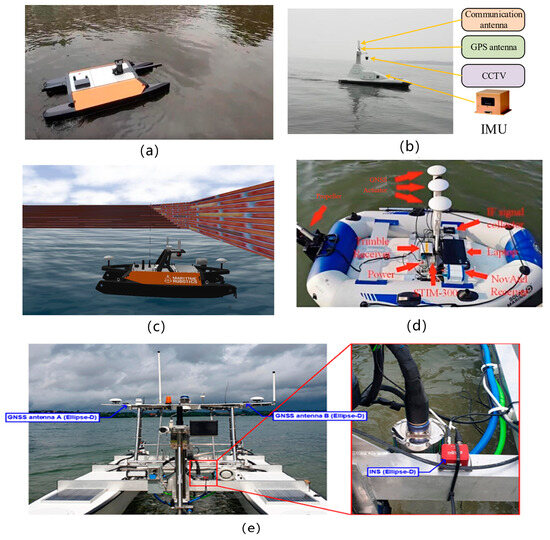
Figure 5.
Navigation testing experimental scenarios at (a) National University of Singapore (Chen et al., 2018) [54], (b) Dalian Maritime University (Wang et al., 2022) [43], (c) Dalian Maritime University (Song et al., 2024) [48] (d) Shanghai Maritime University (Lou et al., 2024) [44] (e) Gdynia Maritime University, Poland (Specht, 2024) [45].
Table 2.
Comparison of various navigation methods.
The navigation system fuses data from multiple sensors and performs real-time path planning to output state variables such as position error, heading deviation, and environmental constraints. Based on this error information, the control system employs adaptive PID or model predictive control algorithms to dynamically adjust thruster forces, rudder angles, and vehicle attitude in order to minimize the deviation between the actual trajectory and the desired route. In addition, control feedback is reinjected into the navigation filter to refine state estimation accuracy, forming a bidirectional iterative closed loop between navigation and control.
4. Control
Control refers to the process of adjusting the state of a USV through algorithms and actuators to accomplish tasks such as path following, stable navigation, and obstacle avoidance. Path planning provides the optimal trajectory, while the control system precisely regulates USV motion, and obstacle avoidance algorithms dynamically correct the heading. The coordination of these three components ensures efficient, safe, and autonomous navigation of the USV.
4.1. Group Control
Swarm control refers to a control method in which multiple intelligent agents achieve globally organized behavior through local interaction rules. When applied to USV systems, it enables coordinated formation navigation, task allocation, and adaptive reconfiguration among multiple vessels, thereby enhancing the efficiency and robustness of large-scale mission execution. This form of control typically relies on a central control node that performs unified planning, scheduling, and task allocation for the entire USV swarm. The central node collects the status information and task progress of each USV in the group and formulates globally optimal task allocation and path planning strategies from a global perspective, thereby improving overall efficiency and coordination of swarm-level missions. In 2019, Jiao et al. from the Naval University designed a new path planning algorithm for the global routing of unmanned underwater vehicles, which combined particle swarm optimization with simulated annealing [65]. In 2021, Yu et al. from Shanghai Jiao Tong University proposed a modified A* algorithm incorporating velocity variation and global optimization, addressing the limitation of traditional global planners being decoupled from the USV control stage [66]. In the same year, He et al. from South China University of Technology investigated the leader–follower problem in swarm control [67]. In 2022, Yang et al. from Jiangsu University of Science and Technology proposed a global path planning algorithm based on Double Deep Q-Networks (Double DQN) to model and optimize multi-task global path planning for amphibious unmanned surface vehicles. A realistic simulation environment was constructed using electronic nautical charts and terrain elevation data. The authors designed a multidimensional state space, a potential-based reward shaping mechanism, and an action masking strategy, which effectively improved the efficiency and energy performance of the path planning process [68]. Building on this research, in 2023, Lee et al. from the Korea Institute of Ocean Science and Technology in Busan developed a swarm control algorithm to overcome the limitations of single-objective systems [69]. In 2024, Wang et al. from Harbin Engineering University proposed a practical global path planning method for USVs by enhancing the traditional Q-learning framework. The approach incorporates a radial basis function neural network to approximate the Q-function, improves the design of the action space, optimizes the reward function and state modeling, and introduces strategies for path smoothing and safe zone expansion [70].
In swarm control environments, key challenges such as fault tolerance, communication delay compensation, and energy-aware routing remain prominent. To address these issues, in 2023, Chen et al. from Guangdong University of Technology employed a Time-Oriented Dispatching (TOD) scheduling strategy and set-membership filtering to enhance fault tolerance, while reducing delay by limiting transmission frequency and mitigating channel conflicts [52]. In 2024, Wang et al. from Qingdao Agricultural University proposed a set of methods including robust filtering, parameter uncertainty modeling, and attack disturbance modeling to improve fault tolerance. They also introduced dynamic encoding compression and distortion compensation mechanisms to mitigate communication delays [53].
The aforementioned studies focus on USV swarm control, global path planning, and obstacle avoidance optimization, integrating intelligent algorithms to enhance autonomous decision-making capabilities. Future research trends will emphasize distributed control, fault tolerance, and multi-agent cooperative optimization, aiming to strengthen the autonomy and adaptability of USV swarms in complex environments.
4.2. Distribution Control
Distributed control refers to a control approach in which each agent makes independent decisions based on local information while collaboratively achieving the overall control objective. When applied to USV systems, it enables autonomous formation, obstacle avoidance, and task reconfiguration without relying on a central node, thereby enhancing system robustness and adaptability. Compared to swarm control, distributed control emphasizes the coordinated control of individual USVs through local information and neighborhood communication. Each USV makes decisions based on its own local perception and the state of neighboring vessels, offering greater flexibility and robustness, which makes it well suited for task allocation and cooperation in dynamic environments. In 2017, Fan et al. from Northwest University of Political Science and Law proposed a formation control strategy for USVs based on a two-layer Model Predictive Control (MPC) framework and designed a distributed MPC algorithm to maintain formation and coordination [71]. In 2019, Xia et al. from Harbin Institute of Technology introduced a local path planning algorithm that combined the velocity obstacle method with an improved quantum particle swarm optimization approach to address local adjustments of global paths during USV navigation [72]. In 2021, Ghommam et al. from Sultan Qaboos University in Muscat, Oman, proposed a novel collision-free distributed formation control method for underactuated USV networks, consisting of a distributed coordination layer and a local fixed-time neural network control layer [73]. In the same year, Hu et al. from Huazhong University of Science and Technology developed a hierarchical framework for distributed estimation and control to predict target states in interconnected networks with jointly inhabited topologies [74]. In 2022, Qu et al. from Northwestern Polytechnical University presented a distributed containment control strategy for multiple USVs under unknown disturbances [75]. In 2023, Pan et al. from Dalian Maritime University proposed a distributed safe formation control method based on model-driven deep reinforcement learning. A deep neural network was trained to learn the USV dynamics model, and model predictive control was incorporated to enable cooperative formation and obstacle avoidance [76]. In 2024, Chen et al. from Harbin Engineering University proposed a distributed fault-tolerant pinning control algorithm to address the problem of distributed fault-tolerant cluster synchronization for multiple USVs under directed communication topologies. This control method ensures cluster synchronization among multiple unmanned surface vehicles [77]. In 2025, Liu et al. from Guangdong Ocean University addressed the problem of formation trajectory control in heterogeneous multi-agent systems by designing a distributed time-varying adaptive state observer for each agent to accurately estimate the state of the virtual leader [78]. Research on distributed control focuses on USV decentralized coordination, emphasizing local perception, neighborhood communication, and autonomous decision-making to enhance system flexibility and robustness.
4.3. Adaptive Control
Adaptive control refers to a control approach in which system parameters are adjusted online in response to environmental changes or model uncertainties. When applied to USV systems, it maintains trajectory tracking accuracy and navigation stability under dynamic variations and external disturbances, thereby enhancing the robustness of mission execution.
In recent years, with the rapid development of emerging technologies such as deep learning, reinforcement learning, and multi-agent cooperation, adaptive control research based on these techniques has also flourished. In 2023, Jiang et al. from Nankai University developed a fully distributed adaptive containment controller for multi-USV containment control under directed communication topologies [79]. In 2024, Wang et al. from Harbin Engineering University designed an adaptive neural control system for underactuated USVs, which consists of a safe envelope motion generator and a trajectory tracking control system [80]. In the same year, Wang et al. from Ningbo University proposed a dynamic target artificial potential field method to address a similar problem [81]. In 2025, Liu et al. from Jiangsu University of Science and Technology addressed the problem of autonomous collision avoidance for USVs by employing risk-level grid mapping and developing a non-uniform algorithm to construct a global path mapping space for navigation in narrow waterways. The method ensures compliance with COLREGs and implements emergency avoidance strategies for non-compliant vessels [82]. The above studies focus on adaptive control for USVs, integrating deep learning, neural networks, and event-triggered mechanisms to enable path planning, obstacle avoidance, and cooperative formation in complex environments. These approaches significantly improve the autonomy, robustness, and real-time performance of USV swarms. A representative control platform used in these studies is illustrated in Figure 6, and a comparative analysis of control strategies is provided in Table 3.
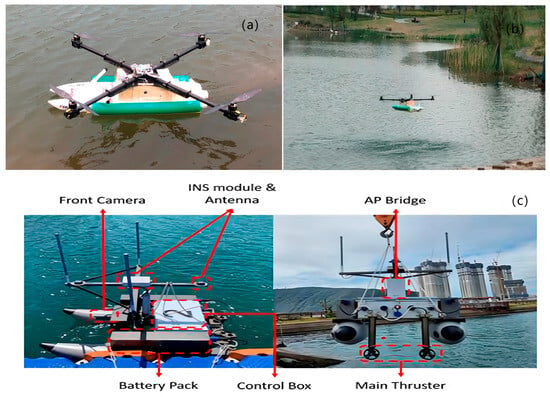
Figure 6.
Control platforms: (a,b) Amphibious USV control platform (Yang et al., 2022) [68]; (c) Leader–follower USV control platform (Lee et al., 2023) [69].
Table 3.
Comparison of different control methods.
4.4. Collaborative Control
Cooperative control, which enables information sharing and collaborative decision-making among multiple autonomous agents, is a key enabling technology for intelligent operations in USV swarms. In recent years, increasing attention has been directed toward heterogeneous system coordination, particularly the integration of USVs and UAVs, which has demonstrated significant potential in a range of maritime tasks. For instance, in 2023, Li et al. proposed a novel cooperative framework integrating 3D environmental mapping and adaptive fuzzy control, enabling effective information exchange and trajectory synchronization between USVs and UAVs in ocean mapping and search missions [83]. In 2024, Li et al. introduced a low-complexity cooperative control algorithm tailored for USV–UAV systems, incorporating a dynamic event-triggered strategy to mitigate communication overload and system uncertainty, commonly encountered in traditional control schemes [84]. In the same year, another study by Li et al. presented a parallel search control framework, which integrated sensor-fault tolerance mechanisms and a neural damping robust controller, thereby enhancing system reliability and stability under complex environmental conditions [85]. These studies collectively indicate that USV–UAV cooperative control has become a prominent research direction, offering valuable insights for the practical deployment of heterogeneous unmanned systems in future marine monitoring and intelligent patrol missions.
Energy efficiency has become a critical concern in control and path planning for Unmanned Surface Vehicles (USVs). To address this issue, Lou et al. from Jiangsu University of Science and Technology proposed an energy-saving path planning method based on curiosity-driven deep reinforcement learning, which enabled USVs to explore more efficient trajectories by leveraging intrinsic motivation mechanisms [86]. In the same year, Wang et al. from Northeastern University introduced a novel framework that enforced trajectory error convergence constraints at the motion control level, while adopting a path-variable quantization scheme at the communication layer. This dual-layer design significantly reduces communication redundancy and improves energy utilization efficiency during cooperative formation tasks [87]. These studies highlight the growing emphasis on energy-aware intelligent control frameworks, which are essential for enhancing the endurance and autonomy of USV systems operating in real-world maritime environments.
Swarm control relies on a centralized node for global planning and coordination, making it suitable for long-duration path optimization and fleet-level scheduling tasks. While it offers strong task organization capabilities, it suffers from limited robustness in the face of communication bottlenecks or central node failures. In contrast, distributed control emphasizes local sensing and neighborhood-based communication, providing greater adaptability and fault tolerance in dynamic scenarios such as multi-task formations and high-frequency obstacle avoidance at sea. However, it poses higher demands on algorithmic coordination and system-wide consistency. Adaptive control excels in environments with uncertain dynamics or frequent disturbances. By incorporating techniques such as reinforcement learning and neural networks, it enables the online optimization of path tracking and attitude stabilization, making it particularly effective for nearshore high-mobility missions. Nevertheless, the computational complexity and learning stability both remain key challenges. Cooperative control has recently extended to heterogeneous USV–UAV systems, enabling cross-domain execution and multi-platform perceptual fusion. This paradigm shows great promise for large-scale maritime monitoring and multi-source search operations, though it introduces substantial complexity in terms of system integration and resource scheduling. In summary, mission profiles with high persistence and predictable paths are better served by centralized swarm control with energy-efficient planning, while frequent environmental changes and spatially distributed operations along coastal zones benefit more from distributed or adaptive architectures. Heterogeneous cooperative systems across domains are expected to play an increasingly vital role in future intelligent marine missions. Future research should focus on multi-strategy fusion, edge-intelligence-enabled cooperation, and closed-loop optimization between control and data to support efficient, safe, and intelligent operation of USV systems under complex task conditions.
After executing adjustments to thruster force and rudder angle, the control system generates detailed execution logs and feedback data. The data-driven system then utilizes historical telemetry, navigation, and control records—employing deep-learning or statistical methods—to build environmental models, issue fault warnings, and update control parameter strategies. In particular, within the “COLREGs-compliant risk inference system for maritime autonomous surface vessels,” real-time collision risk assessments are fed back to the control layer, effectively guiding adaptive adjustments in collision avoidance maneuvers. Through this iterative “control–data-driven–control” framework, USVs can continuously improve trajectory tracking accuracy and mission reliability under complex sea conditions and regulatory constraints [88].
5. Data-Driven Tasks
In USV applications, data fusion observation technologies combine data from multiple sensors for real-time processing, effectively enhancing environmental perception accuracy. This technology is widely applied in marine surveys, environmental measurements, and target detection. By integrating data from radar, sonar, optical sensors, and others, it enables precise positioning, obstacle avoidance, and environmental awareness, providing critical support for autonomous navigation.
5.1. Investigation
Marine surveys refer to the process of acquiring oceanographic, topographic, and biological distribution data using specialized equipment systems. When combined with USV platforms, this process enables efficient, low-cost, and automated maritime exploration and data collection, enhancing the spatial coverage and continuity of survey operations. In 2018, Iovino et al. from Cranfield University, UK, introduced an experimental test for the intermediate-level guidance of USVs. The main objective of this test was to address specific requirements encountered during survey operations [89]. In 2019, Dong et al. from the South China Sea Marine Survey Technology Center, National Oceanic Administration, comprehensively summarized the recent research progress on unmanned underwater vehicles for marine surveys in China [90]. In 2021, Sanchez et al. from the University of Castilla-La Mancha, Spain, presented the ENDURUNS project under the Horizon 2020 framework. The primary objective of this project was to optimize and intelligently use green hydrogen for long-term marine surveys, leveraging USVs and AUVs [91]. These studies primarily focus on the scientific aspects of marine surveys, contributing to the widespread application of USVs in oceanic exploration.
In terms of practical applications in marine surveys, in 2021, Panetta et al. from Michigan State University proposed a compact USV network capable of deploying underwater sensors using an automatic winch, enabling several hours of continuous survey operation [92]. In the same year, De Robertis et al. from the Alaska Fisheries Science Center of the National Oceanic and Atmospheric Administration deployed three USVs equipped with echo sounders to extend the time series of cod abundance from vessel-mounted acoustic trawls, in response to the disruptions caused by the COVID-19 pandemic [93]. In 2022, Liu et al. from Dalian Maritime University introduced a dual-channel, two-stage fog removal network, which ensured reliable vessel detection under foggy conditions [94]. In the same year, Pairet et al. from the Abu Dhabi Technology Innovation Institute completed the production and testing of a new USV named Nukhada, designed specifically for autonomous surveying, inspection, and supporting underwater operations [95]. In 2024, Handegard et al. from the Institute of Marine Research in Bergen, Norway, discussed the goals, system requirements, infrastructure, and regulations for ecological experiments, acoustic trawl surveys, and long-term monitoring using USVs and echo sounders [96]. In 2025, Zhao et al. from Zhejiang University proposed an innovative coverage planning scheme to address various challenges encountered in USV-based bathymetric surveys. They also designed a fuzzy-biased random key evolutionary algorithm to determine the optimal sequence for surveying areas. Real-world lake trials were conducted using the USV SL-20 to validate their approach [97]. The aforementioned studies highlight the diversified application trends of USVs in marine surveys, emphasizing the potential of unmanned technologies in oceanic exploration. They have contributed to the intelligent and sustainable development of marine surveys. The use of USVs in marine surveys is illustrated in Figure 7.
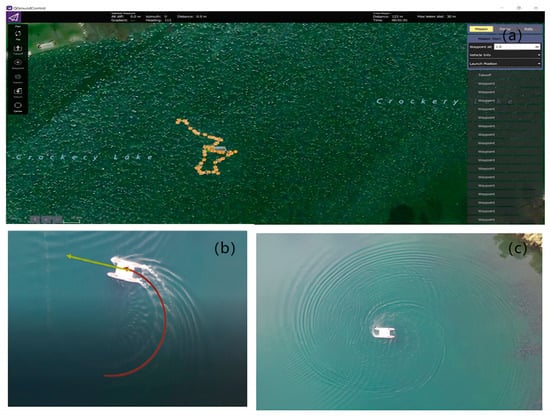
Figure 7.
Oceanographic surveys using USVs: (a) Michigan State University (Panetta et al., 2021) [92]; (b,c) Abu Dhabi Technology Innovation Institute, United Arab Emirates (Pairet et al., 2022) [95].
5.2. Measurement
Hydrographic surveying refers to the process of acquiring data on seafloor topography, water depth, hydrological, and geological features using precision instruments. When integrated with USV platforms, it enables high-precision, multi-scale autonomous mapping operations, thereby enhancing capabilities in marine resource assessment and navigational safety assurance. Hydrographic surveying can be categorized into hydrological measurements and trajectory measurements. Among these, hydrological measurements serve as the core component, focusing on the acquisition of marine environmental parameters such as water depth, temperature, salinity, and turbidity. In 2021, Gao et al. from Shanghai Jiao Tong University analyzed the reliability of USVs in seafloor topographic mapping [98]. In 2023, Douguet et al. from the STICC Laboratory in France introduced a real-time obstacle detection system for unmanned underwater vehicles in marine environments, aimed at improving bathymetric measurements [99]. Also in 2023, Constantinoiu et al. from the Marine Technology and Ocean Engineering Center in Lisbon, Portugal, presented a validated, fast, and reliable technique for processing hydrological data collected via autonomous surveys [100]. In 2024, Specht from Gdynia Maritime University employed GNSS/INS in RTK mode for inland hydrographic surveying and USV trajectory positioning [45]. These studies focused on the application of USVs in hydrological measurements, addressing key aspects such as navigation accuracy, obstacle detection, and data processing. With the integration of GNSS/INS systems, real-time perception, and advanced data processing techniques, the efficiency and reliability of USV-based hydrographic surveys in complex environments are expected to be significantly improved.
Trajectory measurement refers to the precise determination of a USV’s movement path using navigation and positioning technologies, aiming to optimize navigation control and path planning. In 2020, Marchel et al. from Gdynia Maritime University in Poland addressed the issue of path accuracy in bathymetric profiling by introducing a cross-track error measurement, which evaluated the distance between the USV’s position and the bathymetric profile, as well as the lateral computation of the navigation path [101]. In 2021, Jeong et al. from Busan University of Foreign Studies, South Korea, utilized GPS-derived data such as speed, azimuth, and position (latitude and longitude) to measure the vessel’s speed and direction. Additionally, they employed a flow velocity sensor to measure the movement speed of fluid in response to flow velocity changes [102]. In 2025, Shi et al. from the Shanxi Provincial Key Laboratory of Machine Vision and Virtual Reality proposed an image enhancement algorithm based on variable gradient soft threshold correction, specifically designed for USV visual measurement. This method excels in enhancing image details and suppressing noise and is expected to find stable applications in multi-modal data fusion and precise maritime target detection [103]. The above studies primarily focused on high-precision path measurement based on Global Navigation Satellite System (GNSS)/Inertial Navigation System (INS), compensation for fluid environment effects, and the application of deep-learning methods in trajectory optimization, all aimed at improving the navigation stability and measurement accuracy of USVs. A demonstration of the depth measurement system is shown in Figure 8.
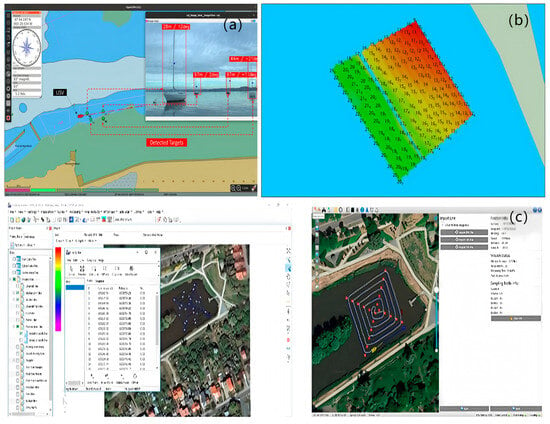
Figure 8.
Hydrographic survey system display: (a) STICC laboratory, France (Douguet et al., 2023) [99]; (b) Maritime University of Gdynia, Poland (Specht, 2024) [45]; (c) Maritime University of Gdynia, Poland (Marchel et al., 2020) [101].
5.3. Perception
Ocean perception refers to the process of acquiring real-time information on the ocean environment and its changes through multi-source sensors. When integrated with USV platforms, it enables multi-scale, dynamic environmental monitoring and feature extraction, enhancing the ability to perceive and respond to complex marine systems. In 2024, Huang et al. from Zhejiang University introduced a novel tracking system for USVs, which ensured continuous target observability through trajectory prediction based on extended Kalman filtering. Simulation experiments validated the effectiveness and robustness of this system [104]. Currently, the primary approaches include visual detection, policy optimization, deep learning, and edge AI deployment.
Visual detection refers to the process of automatically recognizing, classifying, and locating target objects from images or videos using computer vision techniques, playing a key role in the perception of unmanned systems. In 2021, Sun et al. from Harbin Engineering University proposed a USV target detection algorithm based on an optimized feature fusion network to address autonomous environmental perception issues [105]. In 2023, Wang et al. from Shanghai Jiao Tong University introduced a target tracking method based on obstacle perception domains and visual range, enabling USVs to avoid collisions and follow paths in large-scale environments [106]. In the same year, Cheng et al. from Jiangsu University of Science and Technology proposed a collaborative USV–UAV system aimed at enhancing the comprehensive perception capabilities of USVs. The system integrates multi-target recognition, semantic segmentation, and obstacle distance measurement from both USV and UAV perspectives to ensure robust visual perception for USVs [107]. In 2024, Ahmed et al. from Khalifa University in the UAE addressed the issue of low visibility under extreme weather conditions by proposing an autonomous visual perception-based navigation framework for tracking target objects in harsh marine environments [59]. In terms of visual sensor fusion, in 2024, Li et al. from Shanghai Ocean University proposed a surface target detection method based on the fusion of visual and LiDAR point cloud projections, significantly reducing the rate of target misses on the water surface [108]. These studies focused on enhancing the autonomous perception capabilities of USVs in complex environments, with an emphasis on optimizing feature extraction, integrating multi-modal sensor information (visual, radar, LiDAR), and improving environmental adaptability. The goal is to improve target detection, tracking, and obstacle avoidance performance, thereby enabling more reliable autonomous navigation and situational awareness.
Strategy optimization refers to the process of enhancing multi-USV collaboration efficiency and network performance by optimizing communication, coordination, and task allocation strategies, thereby ensuring the stability and effectiveness of the swarm in complex environments. In 2024, Yin et al. from Central South University proposed a distributed CAC method for USVs based on proximal policy optimization to address limitations in perception [109]. In the same year, Li et al. from Central South University introduced a distributed capture strategy optimization approach to tackle the issue of limited sensing range among pursuers [110].
With the increasing complexity of perception tasks, deep learning has emerged as a research hotspot due to its efficient feature extraction and strong environmental adaptability. In 2019, Liu et al. developed a multimodal sensor system aimed at enhancing object detection capabilities for unmanned surface vehicles (USVs) in complex marine environments. The study introduced a deep learning-based object detection network that combines camera images with point cloud data from multiple sensors, achieving high-precision detection of surface objects [111]. In 2023, Sun et al. from Kunming University of Science and Technology proposed an improved PRO-based path planning method for USVs. By incorporating convolutional neural networks to enhance local environmental perception and combining a high-reward sample prioritization learning mechanism, the method accelerates strategy convergence [112]. In 2024, Fan et al. from Harbin Engineering University implemented environmental perception and continuous control for USVs using end-to-end learning based on neural networks [113]. In the same year, Xu et al. proposed a real-time volumetric perception method based on the fusion of radar and cameras for unmanned surface vehicles. The study introduced a volumetric perception network that combines millimeter-wave radar and RGB camera data to achieve low-cost, high-reliability environmental perception. Experimental results demonstrate that the method exhibits strong robustness under extreme weather conditions [114]. Current research has demonstrated that USV perception capabilities can be significantly enhanced through the integration of multi-modal sensors and deep-learning networks. By combining deep reinforcement learning with end-to-end neural architectures, a closed-loop system linking perception and decision-making has been established, enabling more efficient environmental adaptation and autonomous control.
Edge AI deployment refers to the integration of intelligent algorithms directly onto the Unmanned Surface Vehicle (USV) platform, enabling on-site data processing and real-time decision-making. This approach significantly enhances environmental perception capabilities and overall system autonomy in maritime scenarios. In 2024, Gill et al. conducted a comprehensive review of the development, system architecture, and application prospects of edge AI. They proposed a collaborative learning framework for edge AI systems and developed a taxonomy for analyzing collaborative computing between cloud and edge platforms [115]. In the same year, Golec et al. introduced an AI-powered resource scheduling framework based on reinforcement learning for sustainable management in stateless edge computing environments. Their design incorporated energy-aware mechanisms and environmental impact evaluation, with experimental results demonstrating an effective trade-off between energy efficiency and service quality [116]. These studies collectively underscore the increasing relevance of edge AI in enhancing the autonomy, efficiency, and sustainability of intelligent marine systems.
Marine survey missions primarily focus on coverage efficiency and energy sustainability. Centralized sensor scheduling and echo sounding techniques are well-suited for long-endurance tasks, yet they remain limited in extreme environment adaptability and target-level resolution. Environmental measurement, on the other hand, emphasizes high precision and structured modeling. Integrated GNSS/INS systems and multi-channel data processing techniques can significantly improve the accuracy of hydrological measurement and trajectory reconstruction, making them ideal for applications such as port maintenance and resource exploration. However, challenges remain in terms of real-time data processing and navigation error control. Environmental perception places a premium on multimodal sensing and autonomous decision-making capabilities. The fusion of visual, radar, and LiDAR sensors, combined with deep-learning algorithms, has demonstrated strong performance in object detection and obstacle avoidance, especially in dynamic nearshore environments. Nonetheless, the generalization ability of models and the computational load imposed by such methods present challenges for edge deployment. In comparison, survey tasks prioritize wide-area coverage and energy efficiency, measurement tasks demand precision and stability, while perception tasks rely heavily on intelligent processing and environmental adaptability. Future research should aim to establish task-driven perceptual frameworks tailored to specific mission types. By integrating policy optimization, edge AI, and adaptive learning mechanisms, it is possible to achieve a closed-loop system of data sensing and intelligent decision-making, thereby enabling efficient, safe, and intelligent autonomous navigation of USVs across diverse operational scenarios. The marine perception platform is illustrated in Figure 9.

Figure 9.
Ocean sensing platforms: (a) Ocean University of China (Liu et al., 2020) [111]; (b) Harbin Engineering University (Sun et al., 2021) [105]; (c,d) Northwestern Polytechnical University (Xu et al., 2024) [114].
6. Summary and Suggestions
The application of Unmanned Surface Vehicles (USVs) in ocean monitoring and management has made significant progress, driven by their efficiency, low cost, and flexibility, which are essential for marine research. The introduction of machine learning and neural networks has further advanced USV technology towards greater intelligence. However, several key challenges still need to be addressed. These include the need for effective integration of communication, navigation, control, and data-driven systems, which are required to work collaboratively in real-time under dynamic ocean conditions. Issues such as data fusion delays, decision conflicts, and resource competition hinder optimal system performance. Therefore, developing an integrated framework that enables real-time information sharing and adaptive collaboration between different subsystems is a crucial problem that needs to be solved.
Moreover, while the advantages of acoustic, electromagnetic, and optical communication systems are clear, signal attenuation, interference, and instability remain significant challenges. The optimization of these communication methods, through their combined use, will enhance data transmission reliability, resistance to interference, and transmission speeds. Additionally, task scheduling and resource allocation are often tailored to static environments and fall short in the face of dynamic scenarios. The integration of deep reinforcement learning with adaptive optimization methods could significantly improve task distribution and collaboration within USV fleets.
The future of USV technology hinges on advancing multi-modal sensor fusion, which continues to face obstacles such as noise, occlusion, and environmental uncertainty, all of which affect fusion accuracy and real-time capabilities. Further development in this area, coupled with deep-learning and adaptive filtering techniques, will improve the robustness of sensor systems and enhance autonomous navigation and environmental awareness.
Looking ahead, the development of a unified optimization framework that integrates communication, navigation, control, and data-driven subsystems will be essential. By optimizing multi-modal communication, real-time environmental perception, and high-efficiency fusion algorithms, the performance of USVs in complex marine environments can be significantly improved. With continued technological advancements, USVs are poised to play an increasingly critical role in the intelligent and efficient management of marine resources and sustainable marine research.
Author Contributions
Conceptualization, X.W. and G.W.; validation, X.X. and C.L.; investigation, X.W. and Z.L.; resources, G.W. and X.X.; writing—original draft preparation, X.W. and G.W.; writing—review and editing, C.L. and F.Y.; supervision, Z.L. and F.Y.; funding acquisition, Z.L. and F.Y. All authors have read and agreed to the published version of the manuscript.
Funding
This study was supported by the National Key R&D Program Project (2023YFB390720202), (2023YFE0201900); the Key Laboratory of Underwater Acoustic Communication and Marine Information Technology, Ministry of Education (UAC202305); the Qingdao Natural Science Foundation (23-2-1-100-zyyd-jch); the Shandong Postdoctoral Innovation Program (Grant No. SDCX-ZG-202400220); the China Postdoctoral Science Foundation (Grant No. 2024M751857); and the Postdoctoral Fellowship Program of CPSF (Grant No. GZB20240411).
Data Availability Statement
No new data were created or analyzed in this study.
Conflicts of Interest
The authors declare no conflicts of interest.
Appendix A
Table A1.
List of acronyms.
Table A1.
List of acronyms.
| Abbreviation | Full Name | Initial Page |
|---|---|---|
| USV | Unmanned Surface Vehicle | 1 |
| D2QN-JTP | Double Deep Q-Network based Joint Trajectory and Power optimization | 3 |
| AUV | Autonomous Underwater Vehicle | 6 |
| DQN | Deep Q-Network | 6 |
| ME | Magnetoelectric Effect | 6 |
| OAM | Orbital Angular Momentum | 6 |
| HRI | Human-Robot Interaction | 6 |
| DDPG | Deep Deterministic Policy Gradient | 6 |
| SNR | Signal-to-Noise Ratio | 6 |
| BER | Bit Error Rate | 6 |
| DRL | Deep Reinforcement Learning | 6 |
| PHY | Physical Layer | 9 |
| MAC | Medium Access Control Layer | 9 |
| GPS | Global Positioning System | 10 |
| INS | Inertial Navigation System | 10 |
| DWA | Dynamic Window Approach | 13 |
| GNSS | Global Navigation Satellite System | 13 |
| AI | Artificial Intelligence | 13 |
| SLAM | Simultaneous Localization and Mapping | 13 |
| UAV | Unmanned Aerial Vehicle | 13 |
| LiDAR-SLAM | Light Detection and Ranging-based Simultaneous Localization and Mapping | 14 |
| RMSE | Root Mean Square Error | 14 |
| PID | Proportional-Integral-Derivative | 14 |
| FBLS | Fast Broad Learning System | 15 |
| SVM | Support Vector Machine | 15 |
| IMU | Inertial Measurement Unit | 15 |
| RMS | Root Mean Square | 15 |
| RTS | Rauch–Tung–Striebel smoother | 15 |
| GRU | Gated Recurrent Unit | 15 |
| RTK | Real-Time Kinematic | 15 |
| TFMS | Trajectory Feasibility Management System | 15 |
| MPC | Model Predictive Control | 15 |
| RL | Reinforcement Learning | 15 |
| RRT | Rapidly-Exploring Random Tree | 15 |
| MADDPG | Multi-Agent Deep Deterministic Policy Gradient | 15 |
| SM | Sliding Mode | 15 |
| TOD | Time of Departure | 15 |
| BCS | Bayesian Compressive Sensing | 15 |
| Faster R-CNN | Faster Region-based Convolutional Neural Network | 15 |
| LSTM | Long Short-Term Memory | 15 |
| MODD2 | Maritime Object Detection Dataset, version 2 | 15 |
| FPS | Frames Per Second | 15 |
| MOOS-IvP | Mission Oriented Operating Suite—Interval Programming | 15 |
| DNN | Deep Neural Network | 15 |
| GAN | Generative Adversarial Network | 15 |
| MBZIRC | Mohamed Bin Zayed International Robotics Challenge | 15 |
| WaSR | Water-obstacle Separation and Refinement | 15 |
| IMU | Inertial Measurement Unit | 15 |
| MaSTr1325 | Maritime Semantic Trajectory dataset with 1325 images | 15 |
| FRN | Feature Refinement Network | 15 |
| MIoU | Mean Intersection over Union | 15 |
| MPA | Mean Pixel Accuracy | 15 |
| A* | A-star Search Algorithm | 16 |
| COLREG | International Regulations for Preventing Collisions at Sea | 18 |
| DDQN | Double Deep Q-Network | 20 |
| VV-A* | Velocity-Varying A-star | 20 |
| AIS | Automatic Identification System | 20 |
| ANN | Artificial Neural Network | 20 |
| L-F + FT | Leader–Follower with Fault Tolerance | 20 |
| NSFQ-RBF | Non-Singular Fast Terminal Sliding Mode Control with Radial Basis Function Neural Network | 20 |
| IQPSO | Improved Quantum-behaved Particle Swarm Optimization | 20 |
| VO | Velocity Obstacle | 20 |
| DZ | Dead Zone | 20 |
| NMPC | Nonlinear Model Predictive Control | 21 |
| DT | Decision Tree | 21 |
| ANFIS | Adaptive Neuro-Fuzzy Inference System | 21 |
| DET | Deterministic Control | 21 |
| ICM-DDPG | Intrinsic Curiosity Module with Deep Deterministic Policy Gradient | 21 |
| LOS | Line-of-Sight Guidance | 21 |
| ENDURUNS | Energy-based Durable Unmanned Surveying system | 23 |
| COVID-19 | Coronavirus Disease 2019 | 23 |
| USV SL-20 | SL20 Autonomous Survey Boat | 23 |
| CAC | Cooperative Autonomous Capture | 26 |
References
- Kang, Z.; Gao, M.; Liao, Z.; Zhang, A. Collaborative Communication-Based Ocean Observation Research with Heterogeneous Unmanned Surface Vessels. Front. Mar. Sci. 2024, 11, 1388617. [Google Scholar] [CrossRef]
- Patterson, R.G.; Lawson, E.; Udyawer, V.; Brassington, G.B.; Groom, R.A.; Campbell, H.A. Uncrewed Surface Vessel Technological Diffusion Depends on Cross-Sectoral Investment in Open-Ocean Archetypes: A Systematic Review of USV Applications and Drivers. Front. Mar. Sci. 2022, 8, 736984. [Google Scholar] [CrossRef]
- Yang, T.; Guo, Y.; Zhou, Y.; Wei, S. Joint Communication and Control for Small Underactuated USV Based on Mobile Computing Technology. IEEE Access 2019, 7, 160610–160622. [Google Scholar] [CrossRef]
- Zhang, J.; Dai, M.; Su, Z. Task Allocation with Unmanned Surface Vehicles in Smart Ocean IoT. IEEE Internet Things J. 2020, 7, 9702–9713. [Google Scholar] [CrossRef]
- Liu, Y.; Song, R.; Bucknall, R.; Zhang, X. Intelligent Multi-Task Allocation and Planning for Multiple Unmanned Surface Vehicles (USVs) Using Self-Organising Maps and Fast Marching Method. Inf. Sci. 2019, 496, 180–197. [Google Scholar] [CrossRef]
- Zhang, J.; Ren, J.; Cui, Y.; Fu, D.; Cong, J. Multi-USV Task Planning Method Based on Improved Deep Reinforcement Learning. IEEE Internet Things J. 2024, 11, 18549–18567. [Google Scholar] [CrossRef]
- Zhang, J.; Cui, Y.; Fan, X.; Ren, J. Asynchronous Multithreading Reinforcement Control Decision Method for Unmanned Surface Vessel. IEEE Internet Things J. 2023, 10, 22806–22822. [Google Scholar] [CrossRef]
- Liu, Y.; Bucknall, R. Efficient Multi-Task Allocation and Path Planning for Unmanned Surface Vehicle in Support of Ocean Operations. Neurocomputing 2018, 275, 1550–1566. [Google Scholar] [CrossRef]
- Lv, Z.; Zhang, J.; Jin, J.; Li, Q.; Liu, L.; Zhang, P.; Gao, B. Underwater Acoustic Communication Quality Evaluation Model Based on USV. Shock Vib. 2018, 2018, 2609073. [Google Scholar] [CrossRef]
- Chitre, M.; Shahabudeen, S.; Freitag, L.; Stojanovic, M. Recent advances in underwater acoustic communications & networking. In Proceedings of the OCEANS 2008, Quebec City, QC, Canada, 15–18 September 2008; pp. 1–10. Available online: https://ieeexplore.ieee.org/document/5152045 (accessed on 8 March 2025).
- Li, J.-H.; Kang, H.; Kim, M.-G.; Lee, M.-J.; Cho, G.R.; Jin, H.-S. Adaptive Formation Control of Multiple Underactuated Autonomous Underwater Vehicles. J. Mar. Sci. Eng. 2022, 10, 1233. [Google Scholar] [CrossRef]
- Hu, Z.; Su, Z.; Xu, Q. USV-Aided Data Secure Collection Scheme for Underwater Wireless Acoustic Networks. In Proceedings of the GLOBECOM 2023—2023 IEEE Global Communications Conference, Kuala Lumpur, Malaysia, 4–8 December 2023; IEEE: Piscataway, NJ, USA, 2023; pp. 7157–7162. [Google Scholar] [CrossRef]
- Zhang, H.; Wu, L.; Zhi, Y.; Yang, C.; Cao, X.; Zhang, J.; Li, H. Throughput Maximization for USV-Enabled Underwater Wireless Networks Under Jamming Attack. IEEE Sens. J. 2024, 24, 21987–21996. [Google Scholar] [CrossRef]
- Zi, G.; Ma, Z.; Wang, Y.; Wang, Y.; Jia, Z.; Zhao, S.; Huang, D.; Wang, T. Miniaturized Low-Frequency Communication System Based on the Magnetoelectric Effect. Micromachines 2023, 14, 1830. [Google Scholar] [CrossRef] [PubMed]
- He, X.; Dong, H.-W.; Ren, Z.; Zhao, S.-D.; Wang, K.; Hu, Y.; Xiang, P.; Li, Y.; Chen, M.; Fang, D. Inverse-Designed Single-Phase Elastic Metasurfaces for Underwater Acoustic Vortex Beams. J. Mech. Phys. Solids 2023, 174, 105247. [Google Scholar] [CrossRef]
- Hożyń, S. Advancements in Visual Gesture Recognition for Underwater Human–Robot Interaction: A Comprehensive Review. IEEE Access 2024, 12, 163131–163142. [Google Scholar] [CrossRef]
- Routray, S.K.; Javali, A.; Sharma, L.; Gupta, J.; Sahoo, A. The New Frontiers of 800G High Speed Optical Communications. In Proceedings of the 2020 4th International Conference on Electronics, Communication and Aerospace Technology (ICECA), Coimbatore, India, 5–7 November 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 821–825. [Google Scholar] [CrossRef]
- Angus, J.; Bouvier-Brown, M.; Robinson, A. Solar Powered Uncrewed Surface Vehicles (USVs) for Marine Protected Area (MPA) Monitoring. In Proceedings of the OCEANS 2022, Hampton Roads, VA, USA, 17–20 October 2022; IEEE: Piscataway, NJ, USA, 2022; pp. 1–5. [Google Scholar] [CrossRef]
- Shin, H.; Baek, S.; Song, Y. Multidimensional Beam Optimization in Underwater Optical Wireless Communication Based on Deep Reinforcement Learning. IEEE Internet Things J. 2024, 11, 28623–28634. [Google Scholar] [CrossRef]
- Jun-Hong, C.; Jiejun, K.; Gerla, M.; Zhou, S. The Challenges of Building Scalable Mobile Underwater Wireless Sensor Networks for Aquatic Applications. IEEE Netw. 2006, 20, 12–18. [Google Scholar] [CrossRef]
- Zhao, D.; Lun, G.; Xue, R.; Sun, Y. Cross-Layer-Aided Opportunistic Routing for Sparse Underwater Wireless Sensor Networks. Sensors 2021, 21, 3205. [Google Scholar] [CrossRef] [PubMed]
- Balador, A.; Kouba, A.; Cassioli, D.; Foukalas, F.; Severino, R.; Stepanova, D.; Agosta, G.; Xie, J.; Pomante, L.; Mongelli, M.; et al. Wireless Communication Technologies for Safe Cooperative Cyber Physical Systems. Sensors 2018, 18, 4075. [Google Scholar] [CrossRef]
- Dol, H. EDA-SALSA: Towards Smart Adaptive Underwater Acoustic Networking. In Proceedings of the OCEANS 2019—Marseille, Marseille, France, 17–20 June 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Hermans, J.; Sklivanitis, G.; Pados, D.A. A First-of-Its-Kind Low Size, Weight and Power Run-Time Reconfigurable Underwater Modem. In Proceedings of the 2022 Sixth Underwater Communications and Networking Conference (UComms), Lerici, Italy, 30 August–1 September 2022; IEEE: Piscataway, NJ, USA, 2022; pp. 1–5. [Google Scholar] [CrossRef]
- Lu, Y.; Shan, Q.; Xiao, G.; Liang, Y.; Liu, W. Green Polymorphic Cooperative Formation Strategy of Low-Carbon Unmanned Surface Vessels. Front. Energy Res. 2022, 10, 953485. [Google Scholar] [CrossRef]
- Dai, M.; Wu, Y.; Qian, L.; Su, Z.; Lin, B.; Chen, N. UAV-Assisted Multi-Access Computation Offloading via Hybrid NOMA and FDMA in Marine Networks. IEEE Trans. Netw. Sci. Eng. 2023, 10, 113–127. [Google Scholar] [CrossRef]
- Pompili, D.; Akyildiz, I.F. A Multimedia Cross-Layer Protocol for Underwater Acoustic Sensor Networks. IEEE Trans. Wirel. Commun. 2010, 9, 2924–2933. [Google Scholar] [CrossRef]
- Li, N.; Martínez, J.-F.; Meneses Chaus, J.; Eckert, M. A Survey on Underwater Acoustic Sensor Network Routing Protocols. Sensors 2016, 16, 414. [Google Scholar] [CrossRef] [PubMed]
- Dhongdi, S.C.; Nahar, P.; Sethunathan, R.; Gudino, L.J.; Anupama, K.R. Cross-Layer Protocol Stack Development for Three-Dimensional Underwater Acoustic Sensor Network. J. Netw. Comput. Appl. 2017, 92, 3–19. [Google Scholar] [CrossRef]
- Liu, S.; Wang, J.; Shi, W.; Han, G.; Yan, S.; Li, J. CLORP: Cross-Layer Opportunistic Routing Protocol for Underwater Sensor Networks Based on Multiagent Reinforcement Learning. IEEE Sens. J. 2024, 24, 17243–17258. [Google Scholar] [CrossRef]
- Lindsay, J.; Ross, J.; Seto, M.L.; Gregson, E.; Moore, A.; Patel, J.; Bauer, R. Collaboration of Heterogeneous Marine Robots Toward Multidomain Sensing and Situational Awareness on Partially Submerged Targets. IEEE J. Ocean Eng. 2022, 47, 880–894. [Google Scholar] [CrossRef]
- Yuan, Y.; Zhuo, X.; Liu, M.; Wei, Y.; Qu, F. A Centralized Cross-Layer Protocol for Joint Power Control, Link Scheduling, and Routing in UWSNs. IEEE Internet Things J. 2024, 11, 12823–12833. [Google Scholar] [CrossRef]
- Antal, C.; Cioara, T.; Anghel, I.; Antal, M.; Salomie, I. Distributed Ledger Technology Review and Decentralized Applications Development Guidelines. Future Internet 2021, 13, 62. [Google Scholar] [CrossRef]
- Duckham, M.; Nussbaum, D.; Sack, J.-R.; Santoro, N. Efficient, Decentralized Computation of the Topology of Spatial Regions. IEEE Trans. Comput. 2011, 60, 1100–1113. [Google Scholar] [CrossRef]
- Sun, X.; Wang, G.; Fan, Y.; Mu, D.; Qiu, B. A Formation Collision Avoidance System for Unmanned Surface Vehicles with Leader-Follower Structure. IEEE Access 2019, 7, 24691–24702. [Google Scholar] [CrossRef]
- Zhang, G.; Liu, S.; Zhang, X. Adaptive Distributed Fault-Tolerant Control for Underactuated Surface Vehicles with Bridge-to-Bridge Event-Triggered Mechanism. Ocean Eng. 2022, 262, 112205. [Google Scholar] [CrossRef]
- Tan, G.; Sun, H.; Du, L.; Zhuang, J.; Zou, J.; Wan, L. Coordinated Control of the Heterogeneous Unmanned Surface Vehicle Swarm Based on the Distributed Null-Space-Based Behavioral Approach. Ocean Eng. 2022, 266, 112928. [Google Scholar] [CrossRef]
- Zhang, S.; Xiang, X.; Yang, S. Communication Network and Qos Evaluation for Formation Control of Unmanned Surface Vehicles. Brodogradnja 2020, 71, 19–37. [Google Scholar] [CrossRef]
- Shan, Q.; Liu, W.; Li, T.; Zhang, H. A Topology Reconfiguration Strategy for Containment Control of the Multi-USV System Based on Algebraic Connectivity. IEEE Trans. Ind. Electron. 2024, 72, 5322–5332. [Google Scholar] [CrossRef]
- Dai, M.; Huang, N.; Wu, Y.; Qian, L.; Lin, B.; Su, Z.; Lu, R. Latency Minimization Oriented Hybrid Offshore and Aerial-Based Multi-Access Computation Offloading for Marine Communication Networks. IEEE Trans. Commun. 2023, 71, 6482–6498. [Google Scholar] [CrossRef]
- Chen, X.; Tang, J.; Lao, S. Review of Unmanned Aerial Vehicle Swarm Communication Architectures and Routing Protocols. Appl. Sci. 2020, 10, 3661. [Google Scholar] [CrossRef]
- Namgung, H.; Jeong, J.S.; Choi, J.; Geun-ung, K.; Sun-Young, K. An Experimental Result on Information Exchange Using USV Communication Relay System. J. Phys. Conf. Ser. 2019, 1357, 012043. [Google Scholar] [CrossRef]
- Wang, Q.; Liu, S.; Zhang, B.; Zhang, C. FBLS-Based Fusion Method for Unmanned Surface Vessel Positioning Considering Denoising Algorithm. J. Mar. Sci. Eng. 2022, 10, 905. [Google Scholar] [CrossRef]
- Lou, N.; Liu, W.; Hu, Y.; Wang, S.; Han, B. A Robust Integrated Navigation Optimization Method for USV in Signal Occlusion Environment. Phys. Scr. 2024, 99, 096006. [Google Scholar] [CrossRef]
- Specht, M. Testing and Analysis of Selected Navigation Parameters of the GNSS/INS System for USV Path Localization during Inland Hydrographic Surveys. Sensors 2024, 24, 2418. [Google Scholar] [CrossRef]
- Yu, Y.; Fan, Y.; Zhang, Y.; Mu, D.; Sun, X. An Autonomous Collision Avoidance System Unified with the TFMS and the FCS-MPC Strategy for USV. In Proceedings of the 2022 41st Chinese Control Conference (CCC), Hefei, China, 25–27 July 2022; IEEE: Piscataway, NJ, USA, 2022; pp. 3438–3443. Available online: https://ieeexplore.ieee.org/abstract/document/9902408 (accessed on 9 January 2025).
- Lin, X.; McConnell, J.; Englot, B. Robust Unmanned Surface Vehicle Navigation with Distributional Reinforcement Learning 2023. In Proceedings of the 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Detroit, MI, USA, 1–5 October 2023; pp. 6185–6191. Available online: https://ieeexplore.ieee.org/document/10342389 (accessed on 26 March 2025).
- Song, B.; Zhang, J.; Han, X.; Fan, Y.; Sun, Z.; Wang, Y. An Efficient Autonomous Exploration Framework for Unmanned Surface Vehicles in Unknown Waters. J. Mar. Sci. Eng. 2024, 12, 1622. [Google Scholar] [CrossRef]
- Wen, J.; Liu, S.; Lin, Y. Dynamic Navigation and Area Assignment of Multiple USVs Based on Multi-Agent Deep Reinforcement Learning. Sensors 2022, 22, 6942. [Google Scholar] [CrossRef]
- Liu, J.; Guo, H.; Liu, X.; Pan, S. USV Cluster Cooperative Navigation Algorithm Based on Factor Graph. In Proceedings of the 2022 IEEE 6th Advanced Information Technology, Electronic and Automation Control Conference (IAEAC), Beijing, China, 3–5 October 2022; IEEE: Piscataway, NJ, USA, 2022; pp. 955–959. [Google Scholar] [CrossRef]
- Nantogma, S.; Zhang, S.; Yu, X.; An, X.; Xu, Y. Multi-USV Dynamic Navigation and Target Capture: A Guided Multi-Agent Reinforcement Learning Approach. Electronics 2023, 12, 1523. [Google Scholar] [CrossRef]
- Chen, H.; Li, Y.; Liu, C.; Xiao, Z.; Rao, H. Set-Membership State Estimation for Unmanned Surface Vehicle Steering Motion with Try-Once-Discard Protocol. IEEE Sens. J. 2023, 23, 14592–14600. [Google Scholar] [CrossRef]
- Wang, Z.; Lou, P.; Wang, Y.; Li, J.; Wang, J. Motion State Estimation with Bandwidth Constraints and Mixed Cyber-Attacks for Unmanned Surface Vehicles: A Resilient Set-Membership Filtering Framework. Sensors 2024, 24, 6834. [Google Scholar] [CrossRef]
- Chen, Y.; Chen, X.; Zhu, J.; Lin, F.; Chen, B.M. Development of an Autonomous Unmanned Surface Vehicle with Object Detection Using Deep Learning. In Proceedings of the IECON 2018—44th Annual Conference of the IEEE Industrial Electronics Society, Washington, DC, USA, 21–23 October 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 5636–5641. [Google Scholar] [CrossRef]
- Yan, N.; Huang, S.; Kong, C. Reinforcement Learning-Based Autonomous Navigation and Obstacle Avoidance for USVs under Partially Observable Conditions. Math. Probl. Eng. 2021, 2021, 5519033. [Google Scholar] [CrossRef]
- Yao, L.; Kanoulas, D.; Ji, Z.; Liu, Y. ShorelineNet: An Efficient Deep Learning Approach for Shoreline Semantic Segmentation for Unmanned Surface Vehicles. In Proceedings of the 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Prague, Czech Republic, 27 September–1 October 2021; IEEE: Piscataway, NJ, USA, 2021; pp. 5403–5409. [Google Scholar] [CrossRef]
- Sun, W.; Gao, X. Deep Learning-Based Trajectory Tracking Control for Unmanned Surface Vehicle. Math. Probl. Eng. 2021, 2021, 8926738. [Google Scholar] [CrossRef]
- Ma, L.; Xie, W.; Huang, H. Convolutional Neural Network Based Obstacle Detection for Unmanned Surface Vehicle. Math. Biosci. Eng. 2020, 17, 845–861. [Google Scholar] [CrossRef]
- Ahmed, M.; Bakht, A.B.; Hassan, T.; Akram, W.; Humais, A.; Seneviratne, L.; He, S.; Lin, D.; Hussain, I. Vision-Based Autonomous Navigation for Unmanned Surface Vessel in Extreme Marine Conditions. In Proceedings of the 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Detroit, MI, USA, 1–5 October 2023; IEEE: Piscataway, NJ, USA, 2023; pp. 7097–7103. [Google Scholar] [CrossRef]
- Bovcon, B.; Kristan, M. A Water-Obstacle Separation and Refinement Network for Unmanned Surface Vehicles. In Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 31 May–31 August 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 9470–9476. [Google Scholar] [CrossRef]
- Zhou, W.; Huang, X.; Zeng, X. Obstacle Detection for Unmanned Surface Vehicles by Fusion Refinement Network. IEICE Trans. Inf. Syst. 2022, E105.D, 1393–1400. [Google Scholar] [CrossRef]
- Chen, H.; Lin, Z.; Chen, Z.; Jian, J.; Liu, C. Adaptive DWA Algorithm with Decision Tree Classifier for Dynamic Planning in USV Navigation. Ocean Eng. 2025, 321, 120328. [Google Scholar] [CrossRef]
- Akram, W.; Yang, S.; Kuang, H.; He, X.; Din, M.; Dong, Y.; Lin, D. Long-Range Vision-Based UAV-assisted Localization for Unmanned Surface Vehicles. arXiv 2024, arXiv:2408.11429. [Google Scholar] [CrossRef]
- Shen, W.; Yang, Z.; Yang, C.; Li, X. A LiDAR SLAM-Assisted Fusion Positioning Method for USVs. Sensors 2023, 23, 1558. [Google Scholar] [CrossRef] [PubMed]
- Jiao, D.; Xiao, C.; Jianqiang, Z.; Zefang, L. Global Path Planning Algorithm for USV Based on IPSO-SA. In Proceedings of the 2019 Chinese Control And Decision Conference (CCDC), Nanchang, China, 3–5 June 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 2614–2619. [Google Scholar] [CrossRef]
- Yu, K.; Liang, X.; Li, M.; Chen, Z.; Yao, Y.; Li, X.; Zhao, Z.; Teng, Y. USV Path Planning Method with Velocity Variation and Global Optimisation Based on AIS Service Platform. Ocean Eng. 2021, 236, 109560. [Google Scholar] [CrossRef]
- He, S.; Dong, C.; Dai, S.-L. Adaptive Neural Formation Control for Underactuated Unmanned Surface Vehicles with Collision and Connectivity Constraints. Ocean Eng. 2021, 226, 108834. [Google Scholar] [CrossRef]
- Yang, X.; Shi, Y.; Liu, W.; Ye, H.; Zhong, W.; Xiang, Z. Global Path Planning Algorithm Based on Double DQN for Multi-Tasks Amphibious Unmanned Surface Vehicle. Ocean Eng. 2022, 266, 112809. [Google Scholar] [CrossRef]
- Lee, J.; Kang, H.; Choi, J.-H. A Study on the Improvement of USV’s Leader-Follower Swarm Control Algorithm through Fault Coping Algorithm. In Proceedings of the OCEANS 2023—Limerick, Limerick, Ireland, 5–8 June 2023; IEEE: Piscataway, NJ, USA, 2023; pp. 1–5. [Google Scholar] [CrossRef]
- Wang, Y.; Lu, C.; Wu, P.; Zhang, X. Path Planning for Unmanned Surface Vehicle Based on Improved Q-Learning Algorithm. Ocean Eng. 2024, 292, 116510. [Google Scholar] [CrossRef]
- Fan, Z.; Li, H. Two-Layer Model Predictive Formation Control of Unmanned Surface Vehicle. In Proceedings of the 2017 Chinese Automation Congress (CAC), Jinan, China, 20–22 October 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 6002–6007. [Google Scholar] [CrossRef]
- Xia, G.; Han, Z.; Zhao, B. Local Path Planning for USV Based on Improved Quantum Particle Swarm Optimization. In Proceedings of the 2019 Chinese Automation Congress (CAC), Hangzhou, China, 22–24 November 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 714–719. [Google Scholar] [CrossRef]
- Ghommam, J.; Saad, M.; Mnif, F.; Zhu, Q.M. Guaranteed Performance Design for Formation Tracking and Collision Avoidance of Multiple USVs with Disturbances and Unmodeled Dynamics. IEEE Syst. J. 2021, 15, 4346–4357. [Google Scholar] [CrossRef]
- Hu, B.-B.; Zhang, H.-T.; Liu, B.; Meng, H.; Chen, G. Distributed Surrounding Control of Multiple Unmanned Surface Vessels with Varying Interconnection Topologies. IEEE Trans. Contr. Syst. Technol. 2022, 30, 400–407. [Google Scholar] [CrossRef]
- Qu, Y.; Zhao, W.; Yu, Z.; Xiao, B. Distributed Prescribed Performance Containment Control for Unmanned Surface Vehicles Based on Disturbance Observer. ISA Trans. 2022, 125, 699–706. [Google Scholar] [CrossRef]
- Pan, C.; Peng, Z.; Liu, L.; Wang, D. Data-Driven Distributed Formation Control of under-Actuated Unmanned Surface Vehicles with Collision Avoidance via Model-Based Deep Reinforcement Learning. Ocean Eng. 2023, 267, 113166. [Google Scholar] [CrossRef]
- Chen, Z.; Sun, Y.; Li, J.; Liu, M. Distributed Fault-Tolerant Pinning Control for Cluster Synchronization of Multiple Unmanned Surface Vehicles. Ocean Eng. 2024, 296, 116882. [Google Scholar] [CrossRef]
- Liu, H.; Huang, H.; Tian, X.; Zhang, J. Distributed Fixed-Time Formation Control for UAV-USV Multiagent Systems Based on the FEWNN with Prescribed Performance. Ocean Eng. 2025, 328, 120996. [Google Scholar] [CrossRef]
- Jiang, Y.; Wang, F.; Yu, H.; Guo, C.; Liu, Z. Adaptive Prescribed-Time Containment Control for Multiple Unmanned Surface Vehicles with Uncertain Dynamics and Actuator Dead-Zones. Ocean Eng. 2023, 289, 116269. [Google Scholar] [CrossRef]
- Wang, Y.; Qu, Y.; Zhao, S.; Fu, H. Adaptive Neural Containment Maneuvering of Underactuated Surface Vehicles with Prescribed Performance and Collision Avoidance. Ocean Eng. 2024, 297, 116779. [Google Scholar] [CrossRef]
- Wang, D.; Chen, H.; Lao, S.; Drew, S. Efficient Path Planning and Dynamic Obstacle Avoidance in Edge for Safe Navigation of USV. IEEE Internet Things J. 2024, 11, 10084–10094. [Google Scholar] [CrossRef]
- Liu, K.; Ding, S.; Yan, L.; Sun, J.; Wu, S.; Han, S.; Li, F.; Zhou, L. COLREGs-Compliant Autonomous Collision Avoidance and Improved Adaptive LOS-Based Motion Control for USVs in Complex Waters. Ocean Eng. 2025, 318, 120127. [Google Scholar] [CrossRef]
- Li, J.; Zhang, G.; Shan, Q.; Zhang, W. A Novel Cooperative Design for USV–UAV Systems: 3-D Mapping Guidance and Adaptive Fuzzy Control. IEEE Trans. Control Netw. Syst. 2023, 10, 564–574. [Google Scholar] [CrossRef]
- Li, J.; Zhang, G.; Zhang, W.; Shan, Q.; Zhang, W. Cooperative Path Following Control of USV-UAVs Considering Low Design Complexity and Command Transmission Requirements. IEEE Trans. Intell. Veh. 2024, 9, 715–724. [Google Scholar] [CrossRef]
- Li, J.; Zhang, G.; Zhang, X.; Zhang, W. Integrating Dynamic Event-Triggered and Sensor-Tolerant Control: Application to USV-UAVs Cooperative Formation System for Maritime Parallel Search. IEEE Trans. Intell. Transp. Syst. 2023, 25, 3986–3998. [Google Scholar] [CrossRef]
- Lou, M.; Yang, X.; Hu, J.; Wang, Q. Energy-Saving Path Planning Method for Unmanned Surface Vehicles Based on Curiosity-Driven Reinforcement Learning. In Proceedings of the 2024 International Conference on Cyber-Physical Social Intelligence (ICCSI), Doha, Qatar, 8 November 2024; IEEE: Piscataway, NJ, USA, 2024; pp. 1–6. Available online: https://ieeexplore.ieee.org/document/10799486 (accessed on 13 March 2025).
- Wang, H.; Tan, H.; Peng, Z. Quantized Communications in Containment Maneuvering for Output Constrained Marine Surface Vehicles: Theory and Experiment. IEEE Trans. Ind. Electron. 2024, 71, 880–889. [Google Scholar] [CrossRef]
- Namgung, H.; Kim, J.-S. Collision Risk Inference System for Maritime Autonomous Surface Ships Using COLREGs Rules Compliant Collision Avoidance. IEEE Access 2021, 9, 7823–7835. [Google Scholar] [CrossRef]
- Iovino, S.; Savvaris, A.; Tsourdos, A. Experimental Testing of a Path Manager for Unmanned Surface Vehicles in Survey Missions. IFAC-Pap. 2018, 51, 226–231. [Google Scholar] [CrossRef]
- Dong, C.; Li, X.; Chen, X.; Jin, J.; Huang, C. Recent Progress of Marine Survey Unmanned Surface Vehicle in China. Mar. Technol. Soc. J. 2019, 53, 23–29. [Google Scholar] [CrossRef]
- Sanchez, P.J.B.; Márquez, F.P.G.; Govindara, S.; But, A.; Sportich, B.; Marini, S.; Jantara, V.; Papaelias, M. Use of UIoT for Offshore Surveys Through Autonomous Vehicles. Pol. Marit. Res. 2021, 28, 175–189. [Google Scholar] [CrossRef]
- Panetta, C.J. Network of Unmanned Surface Vehicles: Design and Application to Target Tracking. Master’s Thesis, Michigan State University, East Lansing, MI, USA, 2021. [Google Scholar] [CrossRef]
- De Robertis, A.; Levine, M.; Lauffenburger, N.; Honkalehto, T.; Ianelli, J.; Monnahan, C.C.; Towler, R.; Jones, D.; Stienessen, S.; McKelvey, D. Uncrewed Surface Vehicle (USV) Survey of Walleye Pollock, Gadus chalcogrammus, in Response to the Cancellation of Ship-Based Surveys. ICES J. Mar. Sci. 2021, 78, 2797–2808. [Google Scholar] [CrossRef]
- Liu, T.; Zhou, B. Dual-Channel and Two-Stage Dehazing Network for Promoting Ship Detection in Visual Perception System. Math. Probl. Eng. 2022, 2022, 8998743. [Google Scholar] [CrossRef]
- Pairet, È.; Spanò, S.; Mankovskii, N.; Pellegrino, P.; Zhilin, I.; Nicola, J.; Gala, F.L.; Masi, G.D. Nukhada USV: A Robot for Autonomous Surveying and Support to Underwater Operations. In Proceedings of the OCEANS 2022—Chennai, Chennai, India, 21–24 February 2022; pp. 1–6. [Google Scholar] [CrossRef]
- Handegard, N.O.; De Robertis, A.; Holmin, A.J.; Johnsen, E.; Lawrence, J.; Le Bouffant, N.; O’Driscoll, R.; Peddie, D.; Pedersen, G.; Priou, P.; et al. Uncrewed Surface Vehicles (USVs) as Platforms for Fisheries and Plankton Acoustics. ICES J. Mar. Sci. 2024, 81, 1712–1723. [Google Scholar] [CrossRef]
- Zhao, L.; Bai, Y.; Paik, J.K. Optimal Coverage Path Planning for USV-Assisted Coastal Bathymetric Survey: Models, Solutions, and Lake Trials. Ocean Eng. 2024, 296, 116921. [Google Scholar] [CrossRef]
- Gao, C.; Guo, Y.; Zhong, M.; Liang, X.; Wang, H.; Yi, H. Reliability Analysis Based on Dynamic Bayesian Networks: A Case Study of an Unmanned Surface Vessel. Ocean Eng. 2021, 240, 109970. [Google Scholar] [CrossRef]
- Douguet, R.; Heller, D.; Laurent, J. Multimodal Perception for Obstacle Detection for Flying Boats—Unmanned Surface Vehicle (USV). In Proceedings of the OCEANS 2023—Limerick, Limerick, Ireland, 5–8 June 2023; IEEE: Piscataway, NJ, USA, 2023; pp. 1–8. [Google Scholar]
- Constantinoiu, L.-F.; Bernardino, M.; Rusu, E. Autonomous Shallow Water Hydrographic Survey Using a Proto-Type USV. J. Mar. Sci. Eng. 2023, 11, 799. [Google Scholar] [CrossRef]
- Marchel, Ł.; Specht, C.; Specht, M. Assessment of the Steering Precision of a Hydrographic USV along Sounding Profiles Using a High-Precision GNSS RTK Receiver Supported Autopilot. Energies 2020, 13, 5637. [Google Scholar] [CrossRef]
- Jeong, S.-K.; Ji, D.-H.; Oh, J.-Y.; Seo, J.-M.; Choi, H.-S. Disturbance Learning Controller Design for Unmanned Surface Vehicle Using LSTM Technique of Recurrent Neural Network. J. Intell. Fuzzy Syst. 2021, 40, 8001–8011. [Google Scholar] [CrossRef]
- Shi, B.; Cao, T.; Han, H.; Xu, Z.; Wang, Z.; Ge, Q. An Intelligence Enhancement Method for USV Navigation Visual Measurement Based on Variable Gradient Soft-Threshold Correction. Measurement 2025, 242, 116201. [Google Scholar] [CrossRef]
- Huang, T.; Xue, Y.; Xue, Z.; Zhang, Z.; Miao, Z.; Liu, Y. USV-Tracker: A Novel USV Tracking System for Surface Investigation with Limited Resources. Ocean Eng. 2024, 312, 119196. [Google Scholar] [CrossRef]
- Sun, X.; Liu, T.; Yu, X.; Pang, B. Unmanned Surface Vessel Visual Object Detection Under All-Weather Conditions with Optimized Feature Fusion Network in YOLOv4. J. Intell. Robot. Syst. 2021, 103, 55. [Google Scholar] [CrossRef]
- Wang, P.; Liu, R.; Tian, X.; Zhang, X.; Qiao, L.; Wang, Y. Obstacle Avoidance for Environmentally-Driven USVs Based on Deep Reinforcement Learning in Large-Scale Uncertain Environments. Ocean Eng. 2023, 270, 113670. [Google Scholar] [CrossRef]
- Cheng, C.; Liu, D.; Du, J.-H.; Li, Y.-Z. Research on Visual Perception for Coordinated Air–Sea through a Cooperative USV-UAV System. J. Mar. Sci. Eng. 2023, 11, 1978. [Google Scholar] [CrossRef]
- Li, Y.; Wang, Y.; Xie, J.; Xu, C.; Zhang, K. Target Detection on Water Surfaces Using Fusion of Camera and LiDAR Based Information. Comput. Mater. Contin. 2024, 80, 467–486. [Google Scholar] [CrossRef]
- Yin, M.; Zhao, Y.; Li, F.; Liu, B.; Yang, C.; Gui, W. Collision Avoidance Control for Limited Perception Unmanned Surface Vehicle Swarm Based on Proximal Policy Optimization. J. Frankl. Inst. 2024, 361, 106709. [Google Scholar] [CrossRef]
- Li, F.; Yin, M.; Wang, T.; Huang, T.; Yang, C.; Gui, W. Distributed Pursuit-Evasion Game of Limited Perception USV Swarm Based on Multiagent Proximal Policy Optimization. IEEE Trans. Syst. Man Cybern. Syst. 2024, 54, 6435–6446. [Google Scholar] [CrossRef]
- Liu, H.; Nie, J.; Liu, Y.; Wu, Y.; Wang, H.; Qu, F.; Liu, W.; Li, Y. A Multi-Modality Sensor System for Unmanned Surface Vehicle. Neural Process. Lett. 2020, 52, 977–992. [Google Scholar] [CrossRef]
- Sun, P.; Yang, C.; Zhou, X.; Wang, W. Path Planning for Unmanned Surface Vehicles with Strong Generalization Ability Based on Improved Proximal Policy Optimization. Sensors 2023, 23, 8864. [Google Scholar] [CrossRef] [PubMed]
- Fan, Z.; Wang, L.; Meng, H.; Yang, C. Data-Based Deep Reinforcement Learning and Active FTC for Unmanned Surface Vehicles. J. Frankl. Inst. 2024, 361, 106960. [Google Scholar] [CrossRef]
- Xu, H.; Zhang, X.; He, J.; Yu, Y.; Cheng, Y. Real-Time Volumetric Perception for Unmanned Surface Vehicles Through Fusion of Radar and Camera. IEEE Trans. Instrum. Meas. 2024, 73, 5015912. [Google Scholar] [CrossRef]
- Gill, S.S.; Golec, M.; Hu, J.; Xu, M.; Du, J.; Wu, H.; Walia, G.K.; Murugesan, S.S.; Ali, B.; Kumar, M.; et al. Edge AI: A Taxonomy, Systematic Review and Future Directions. Clust. Comput. 2025, 28, 18. [Google Scholar] [CrossRef]
- Golec, M.; Gill, S.S.; Cuadrado, F.; Parlikad, A.K.; Xu, M.; Wu, H.; Uhlig, S. ATOM: AI-Powered Sustainable Resource Management for Serverless Edge Computing Environments. IEEE Trans. Sustain. Comput. 2024, 9, 817–829. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).