1. Introduction
In light of the intensification of the global greenhouse effect, there has been a global consensus to actively respond to the dual-carbon development goal of low-carbon and zero-carbon fuels. In order to effectively reduce carbon emissions from the shipping sector, the International Maritime Organization (IMO) has introduced a series of laws and regulations. However, despite these measures, the global shipping industry is still facing tremendous pressure, and there is an urgent need for in-depth research and exploration of innovative solutions [
1,
2].
As a significant component of global trade, shipping has emerged as a crucial mode of transportation in transoceanic trade, offering substantial economic and regional advantages. Statistical data indicate that approximately 90% of global trade is dependent on maritime transportation, yet 3% of the total global carbon footprint is attributed to this sector [
3]. In response to the issue of marine pollution and excessive carbon emissions resulting from fuel consumption, the advancement of novel energy hybrid (or all-electric) vessels, waste heat recovery, and other technologies has emerged as a pivotal research area, with the objective of enhancing the energy efficiency of ships [
4]. These ships integrate environmentally friendly fuels, including methanol (Sinopharm Chemical Reagent Co. Ltd., Shanghai, China), ammonia (KBR, Houston, TX, USA), and methane–ammonia blends (MAN Energy Solutions, Hamburg, Germany), with novel energy sources, such as solar and wind, to create hybrid ship propulsion systems, representing a significant stride toward sustainable container shipping [
5,
6,
7]. Nevertheless, the performance of the propulsion motor, which constitutes a pivotal element in the ship electric propulsion system, will inevitably influence the overall efficiency of the system. While the implementation of wind–light–electric–fuel hybrid propulsion systems allows for the comprehensive utilization of multiple energy sources, enhancing energy utilization efficiency [
8], various propulsion motors still encounter significant challenges in the dynamic and evolving marine environment. These challenges include the fluctuating parameters of internal resistance and the friction coefficient, as well as external sea state-induced disturbances. These factors collectively impact the control performance of electric propulsion systems [
9].
PMSMs are widely utilized in high-speed precision machinery, flywheel energy storage, aerospace, and shipboard transportation due to their simple structure, high torque density, superior efficiency, and good reliability. They have become the predominant propulsion motors for current hybrid ships [
10,
11]. However, their nonlinear and time-varying characteristics, as well as the coupling of motor parameters, make it challenging to measure disturbances in the control process, while the motor parameters also change over time [
12]. To ensure the controllability and maneuverability of the ship during navigation, the control strategy of the motor drive must meet stricter requirements.
The present study examines the multi-branch fusion research architecture of the control algorithm of the PMSM drive system, which comprises four major categories: traditional control, intelligent control, robust control, and nonlinear control. The central problem that needs to be solved in this field is the construction of a controller with dynamic parameter-adaptive ability to improve the system’s anti-disturbance performance. The following analysis reviews the research progress of different control strategies: In the realm of traditional controllers, notable examples include classical Proportional–Integral Differentiation (PID) control and backstepping control, which are distinguished by their simplicity and ease of engineering implementation. In a recent study, Fadzrizan Mohd Hanif et al. [
13] proposed a novel piecewise affine PI controller for a buck converter-generated DC motor. The proposed PA function is expected to provide better control accuracy. Zhang et al. [
14] proposed an adaptive proportional–integral resonance controller to suppress inverter speed pulsation and improve the stability of the system at different speeds. Wang et al. [
15] and Nguyen et al. [
16] proposed a backstepping observer based on a backstepping control algorithm that estimates the inverse electromotive force and disturbances of the motor system, thereby reducing the system state error. In terms of the intelligent controller, the system’s ability to handle nonlinear disturbances is significantly improved by incorporating artificial intelligence techniques such as fuzzy inference and neural networks. In a recent research analysis, Subarao et al. [
17] presented the design, control, and performance comparison of PI and ANFIS controllers for BLDC motor-driven electric vehicles and verified that the ANFIS controller exhibited superior dynamic performance. In another study, Kroics et al. [
18] proposed a BLDC motor speed control with a digital adaptive PID–fuzzy controller and reduced the harmonic content to shorten the transition time and avoid the overshoot phenomenon. The authors of [
19] proposed a PID control algorithm based on a multi-strategy enhanced dung beetle optimizer and back-propagation neural network for DC motor control, which was applied to improve the control accuracy of the DC motor system. Lotfi et al. [
20] proposed a data-driven Brain Emotional Learning-Based Intelligent Controller (BELBIC) for nonlinear MIMO systems to study the control of nonlinear multiple-input multiple-output (MIMO) systems by dynamically adjusting the probability coefficients. Liu et al. [
21], Wang et al. [
22], and Yue et al. [
23] used intelligent control strategies combining neural networks, deep learning, and data-driven methods, which were applied to improve the dynamic performance of Permanent Magnet Synchronous Motors (PMSMs) and optimize the regulation effect of controller parameters and power allocation. In the domain of robust controllers, sliding mode control (SMC) and the algorithms derived from it represent a fundamental framework, exhibiting distinct advantages in addressing uncertainties. The efficacy of these methods is further enhanced by the introduction of various observers, including the Sliding Mode Observer (SMO) [
24], the Extended Sliding Mode Load Torque Observer with Variable Structure (ESMLTO) [
25], the Learning Observer [
26], the Hyper-Twisted Observer [
27], etc., which enable the controller to be effectively applied to situations with variable system parameters and complex perturbations. For example, Chen et al. [
28] designed a robust model-free ultra-twisted sliding mode control method based on the Extended Sliding Mode Disturbance Observer (ESMDO) for improving the anti-interference capability of motor systems. Tian et al. [
29] proposed a robust adaptive resonance control method, which is applied to the problem of poor robustness of adaptive resonance control in the face of non-periodic disturbances, and Wang et al. [
30] proposed a robust model-free super-twisted sliding mode control method based on the Adaptive Active Disturbance Rejection Controller (AADRC) to improve the Extended State Observer (ESO), which realizes the compensation of disturbance estimation for a PMSM current loop in a complex sea state. In the realm of nonlinear controllers, the development and utilization of advanced mathematical tools by advanced mathematical engineers has led to significant advancements in the field of traditional control theory. Jabari et al. [
31] proposed an efficient DC motor speed control using a Novel Multi-Stage FOPD (1 + PI) Controller optimized by the Pelican Optimization Algorithm for the purpose of the speed regulation of DC motors. Suid et al. [
32] proposed an optimal parameterization method based on the Nonlinear Sine Cosine Algorithm (NSCA) for the sigmoid PID controller applied to the Automatic Voltage Regulator (AVR). The proposed method ensures the accurate compensation of unknown disturbances. Senhaji et al. [
33] and Chaou et al. [
34] proposed a backstepping control technique for regulating the speed and current of a PMSM in a standard operating environment. However, given the unavoidable presence of external environmental effects, uncertainties in motor parameters, and unknown external disturbances, Karabacak et al. [
35] proposed the speed and current regulation of a PMSM via nonlinear and adaptive backstepping control. On this basis, the present study explores a series of issues, including the command implementation and filtering design of the virtual controller, steady-state error, and finite-time convergence, among others.
A thorough review of the extant literature reveals that a singular control method invariably falls short in attaining an optimal control effect. This is evidenced by the occurrence of a shivering phenomenon, exacerbated by non-matching perturbations, and the issue of system state error in robust control. Moreover, high-frequency switching in SMC still gives rise to the shivering phenomenon, and the implementation of inverse-stepping control in the controller will unavoidably lead to an increase in the complexity of the differential derivation of the system state. In addressing the aforementioned challenges in ship PMSM control, this paper proposes a cascaded vector control technique, namely, the Adaptive Finite-Time Command-Filtered Backstepping Controller (AFTCFBC), which is derived from a mathematical model of a PMSM with unknown perturbations and uncertain parameters. A comparative analysis of the AFTCFBC with other nonlinear control schemes, including the recent neuroendocrine PID controller, BELBIC PID controller, sigmoid PID controller, and fractional-order PID controller, reveals the significant advantages of the AFTCFBC in multiple domains.
In terms of control accuracy, the AFTCFBC has the capacity to effectively manage complex working conditions in ship PMSM control. This includes scenarios involving unknown disturbances, such as waves and wind, as well as uncertainties, such as load changes and motor parameter changes. By accurately controlling the motor operation state, it ensures the stable output of the ship’s power system. In contrast, other control schemes may face challenges in maintaining such high levels of accuracy. In terms of anti-interference capacity, the AFTCFBC’s adaptive and finite-time control characteristics enable swift adaptation to disturbances, effectively mitigating their effects. For instance, when a ship encounters adverse sea conditions, it can swiftly adjust its control strategy to maintain the normal operation of the PMSM. In contrast, controllers such as the sigmoid PID exhibit limited anti-interference effectiveness in response to sudden disturbances of this nature. In terms of dynamic response speed, the AFTCFBC, when combined with the advantages of finite-time control, can respond more quickly to rapid changes in the ship’s operating conditions (e.g., emergency acceleration, deceleration, etc.) by adjusting the motor speed and torque and other parameters to ensure the ship’s maneuverability. In contrast, other control schemes have difficulty responding to the demand for rapid dynamic control of the ship. From the standpoint of system stability assurance, the AFTCFBC, through the judicious design of exponential decay, sliding mode function, and backstepping feedback control strategy, ensures the integrity of the entire control system in the face of a range of uncertainties. This approach enables the system to maintain optimal stability throughout the ship’s long-term operation. This is particularly noteworthy in the context of a ship’s long-term voyage, where the reliability of the PMSM control system is paramount. In comparison to alternative control schemes, the AFTCFBC exhibits superior stability maintenance capabilities, with a tendency to exhibit less variability and more reliability. This superiority is evident in scenarios where system stability must be ensured, as the AFTCFBC provides a comprehensive and effective guarantee, while other control schemes may exhibit fluctuations and deficiencies in stability maintenance. Consequently, the AFTCFBC is anticipated to be a suitable option for PMSM control, ensuring the efficient and reliable operation of vessels in complex navigation environments.
The design of the AFTCFBC in this paper takes into account the complexity and specificity of ship PMSM control, integrating the advantages of multiple control methods. The paper proposes finite-time convergence control based on an adaptive law and a backstepping sliding mode control method based on a command filter, which effectively solves the key problems of control accuracy, anti-interference ability, dynamic response speed, and stability guarantee. The rest of this paper is structured as follows:
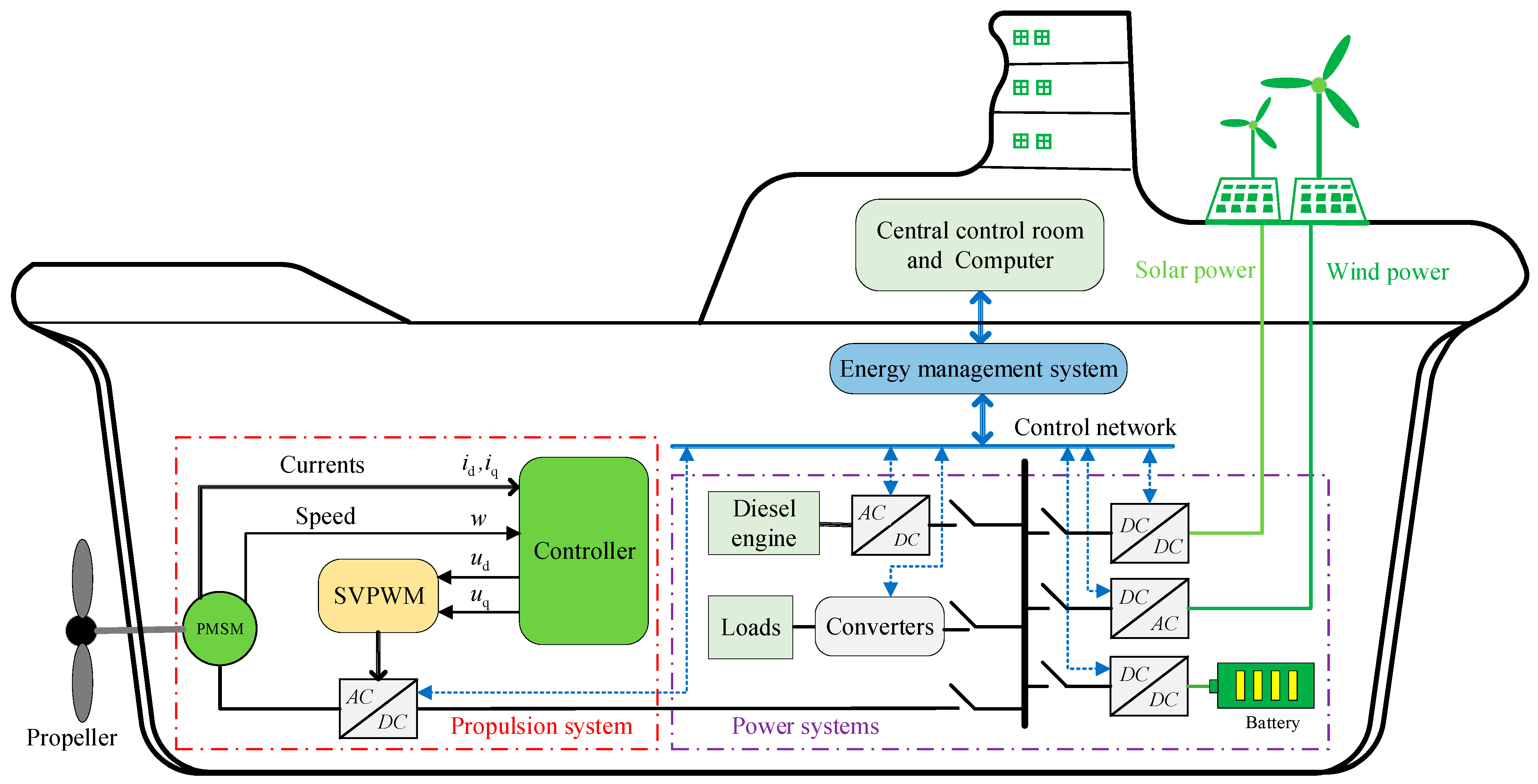
Section 2 presents the structural framework of the new energy hybrid ship propulsion system and the construction of the PMSM mathematical model with matched or unmatched perturbations.
Section 3 provides the design of the AFTCFBC to enable the output of the system to track the desired rotational speed within a finite period of time.
Section 4 demonstrates the stability of the proposed AFTCFBC by applying Lyapunov theory.
Section 5 outlines a simulation of the designed controller.
Section 6 offers a summary and conclusions.
3. AFTCFBC Design
This section of the paper is concerned with the issue of how to achieve effective improvement in the control of the ship’s PMSM parameters in the context of unknown load disturbance variations in a complex marine environment. In doing so, it considers the phenomenon of controller oscillation and overshoot, which may occur as a result of jitter vibration during the SMC process. In order to achieve the accurate tracking of the nonlinear system (2) output (
w) relative to the reference signal (
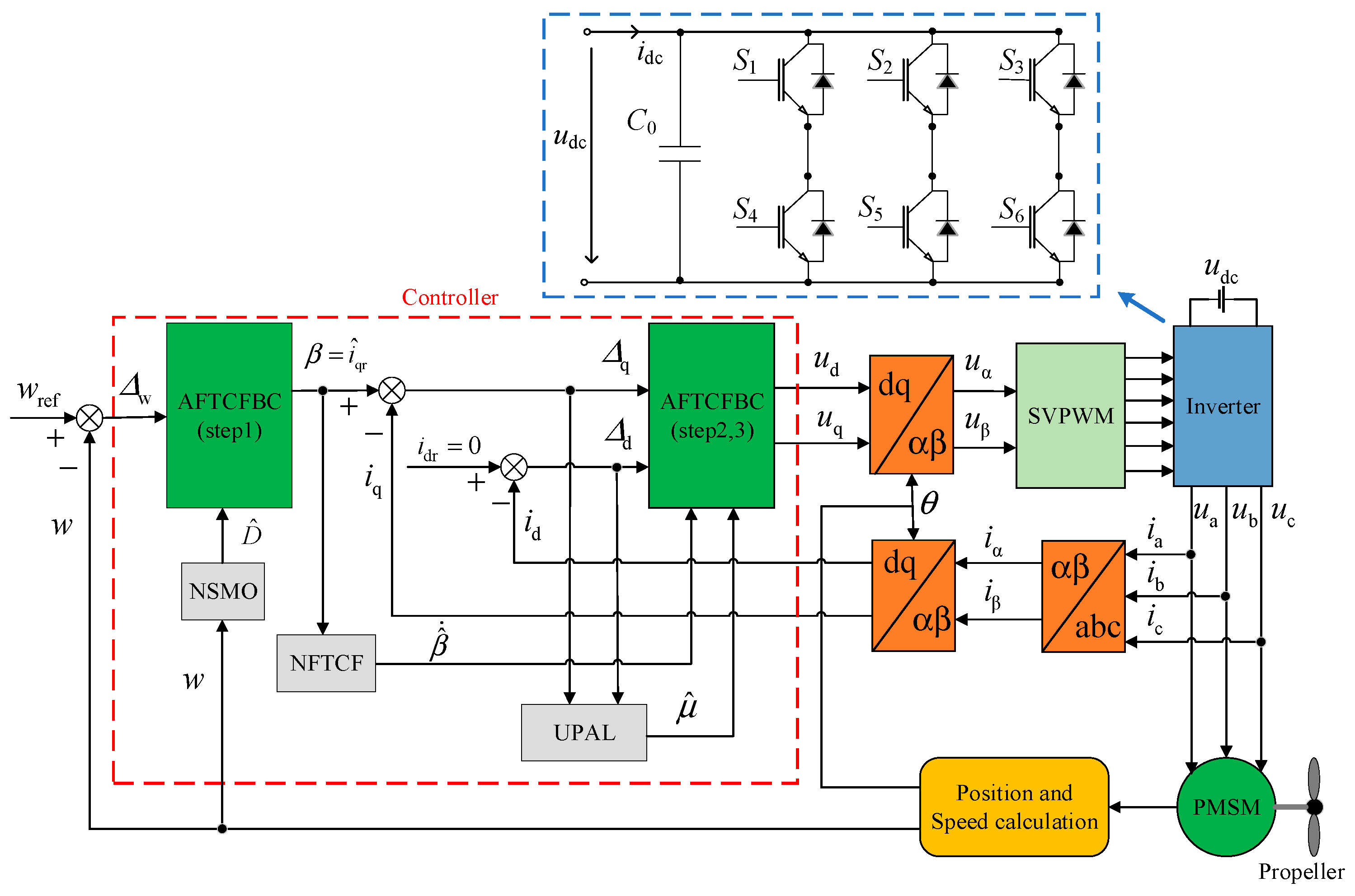
wref) within a finite time frame, an AFTCFBC control strategy is proposed. The block diagram of the controller structure is divided into two sections: outer-loop speed control and single inner-loop current control, as expressed in
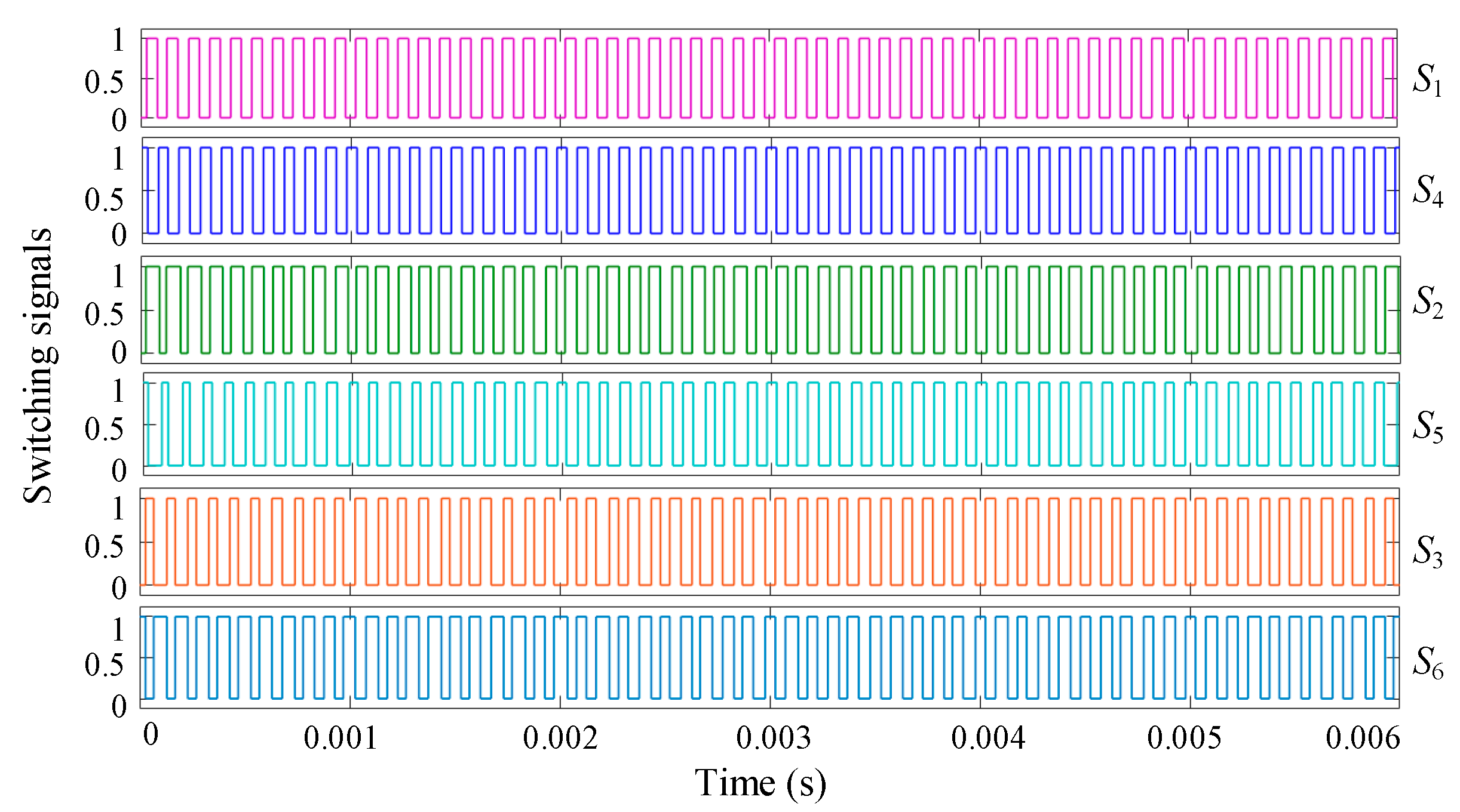
Figure 2. The configuration of the inverter depicted in the figure comprises
C0, which denotes capacitance,
udc, representing the inverter’s DC-side voltage, and
idc for the inverter’s DC-side current. Additionally,
S1,
S2,
S3,
S4,
S5, and
S6 refer to six switching signals, with the input being facilitated by SVPWM. In this configuration, the transistors of SVPWM act as switching devices.
Step 1 involves the construction of the virtual current controller via NSMC. Steps 2 and 3 then proceed with the design of the d-axis and q-axis voltage controllers, utilizing the virtual control currents iqr, NFTCF, and UPAL to obtain the control signals (ud, uq). The control signals ud and uq are transformed in a series of steps, beginning with an inverse Park transform, followed by space vector pulse-width modulation (SVPWM), an inverter, and finally a Clarke transform. This sequence of transformations is used to obtain the direct (id) and intersection (iq) currents, which are then fed back to the controller as part of a single inner-loop current feedback control loop. In the field of motor control, the Park and Clarke transforms are two widely used mathematical transformations that facilitate the conversion of variables in a three-phase (abc) coordinate system into a two-phase (αβ) stationary coordinate system, as well as the synchronous rotation of direct-axis (d) and cross-axis (q) coordinate systems. This enables the development of more intuitive and efficient control strategies. The inverter is responsible for converting the direct-current power supply to an alternating-current power supply. The SVPWM technique is a common inverter control technique that precisely controls the output voltage waveform and frequency by adjusting the pulse width. The rotor position (θ) and speed (w) of the PMSM are obtained from the position and speed calculation module, which constitutes the external-loop speed feedback control of the controller. This results in a cascaded dual closed-loop vector control strategy.
3.1. Designing Nonlinear Finite-Time Command Filter
The designed command filter can be employed to address the issue of the complexity of the differential derivative calculation resulting from the implementation of backstepping control, thereby reducing the maximum steady-state error of the system output as expressed in Equation (3).
where
denotes the cross-axis desired virtual current control quantity, as shown in
Figure 2.
is the estimated state signal
β, and
β denotes the virtual current filtering signal, the design procedure for which is outlined in
Section 3.2.2. Additionally, 0 <
r < 1,
r,
δ is a positive constant. In this particular study, we have set
r = 0.5.
In Equation (3), and denote monotonically bounded functions with respect to the variable t, with the stipulation that both functions must be non-negative. The design of for distinct rotational speeds, denoted by , enables the dynamic adjustment of the filter’s (3) filtering capability in response to the variation in rotational speed, . Assume that the state signal β and its first-order derivatives are bounded. In this case, the filter error will converge to a value close to zero within a finite time frame.
The present study analyzes the stability of command filters in the context of Lyapunov candidate functions, as expressed in Equation (4).
The derivation of
ultimately yields Inequation (5).
If there exists a positive constant
M such that
and there exists
, then there exists the inequality shown in Inequation (6).
where
.
When satisfying
, we have
, and if there exists a positive constant
m such that at this point
, then we can obtain the equation shown in Equation (7).
where
.
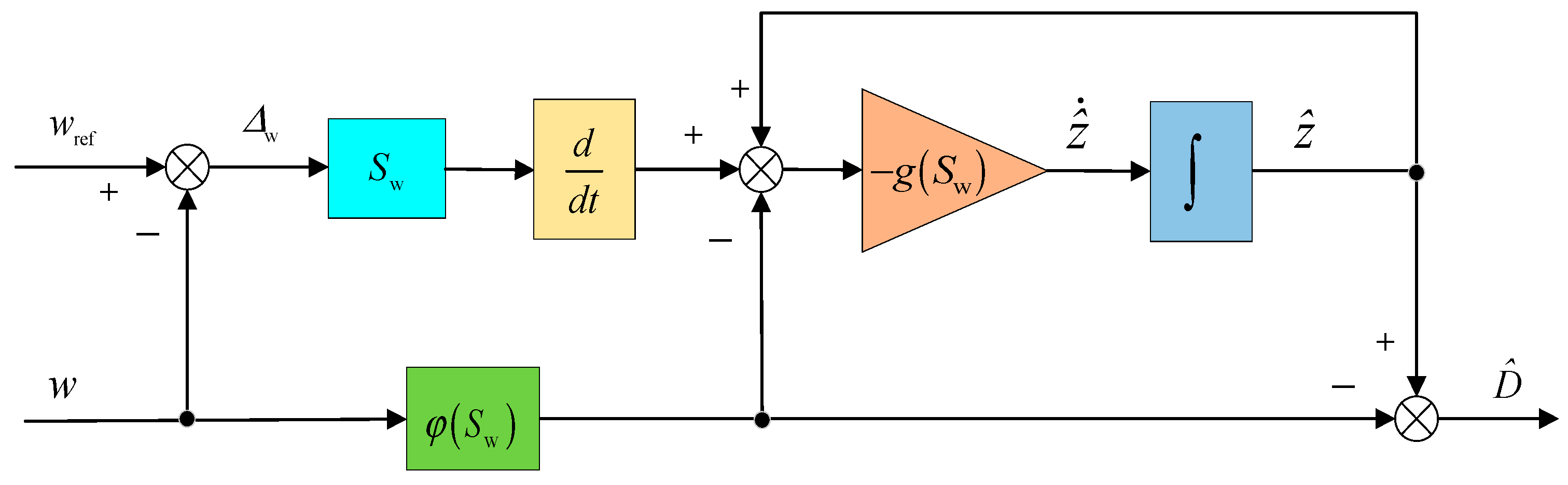
According to Lemma 3, the nonlinear command filter (3) is finite-time-stable. The control structure diagram of the filter shown in
Figure 3 is constructed, and the stability of the proposed NFTCF is verified by simulation.
The input signal
β(
t) is given by Equation (8).
where
f is the signal frequency in Hertz (Hz).
The nonlinear function is shown in Equation (9).
where
are positive constants, the specific values of which are related to
β and
w(
t); in this paper,
. The given signal
w(
t) is a random white noise interference signal superimposed at the speed of 500 r/min.
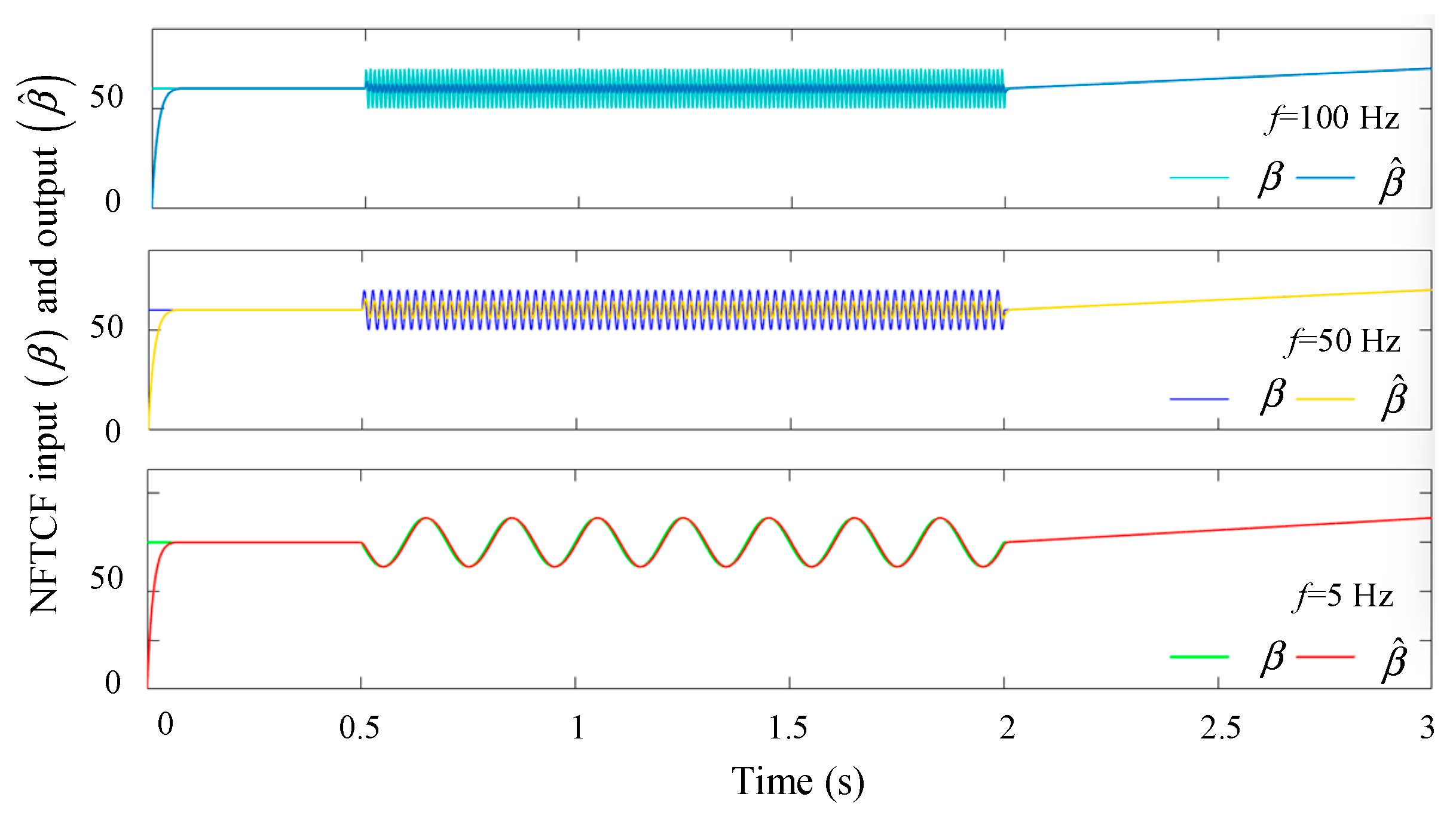
The tracking performance of the NFTCF output
signal, which is tracked at different frequencies (
f = 5 Hz, 50 Hz, 100 Hz) of the input
β signal, is analyzed through simulations. The effect of the input signal
β at different frequencies on the stability of the filter is investigated through these simulations. The parameters
of Equation (3) are analyzed for their effect on the filter’s stability under the selected input signal
β of the same frequency. The values of their best performance are selected. The results of these analyses can be found in
Figure 4,
Figure 5,
Figure 6 and
Figure 7.
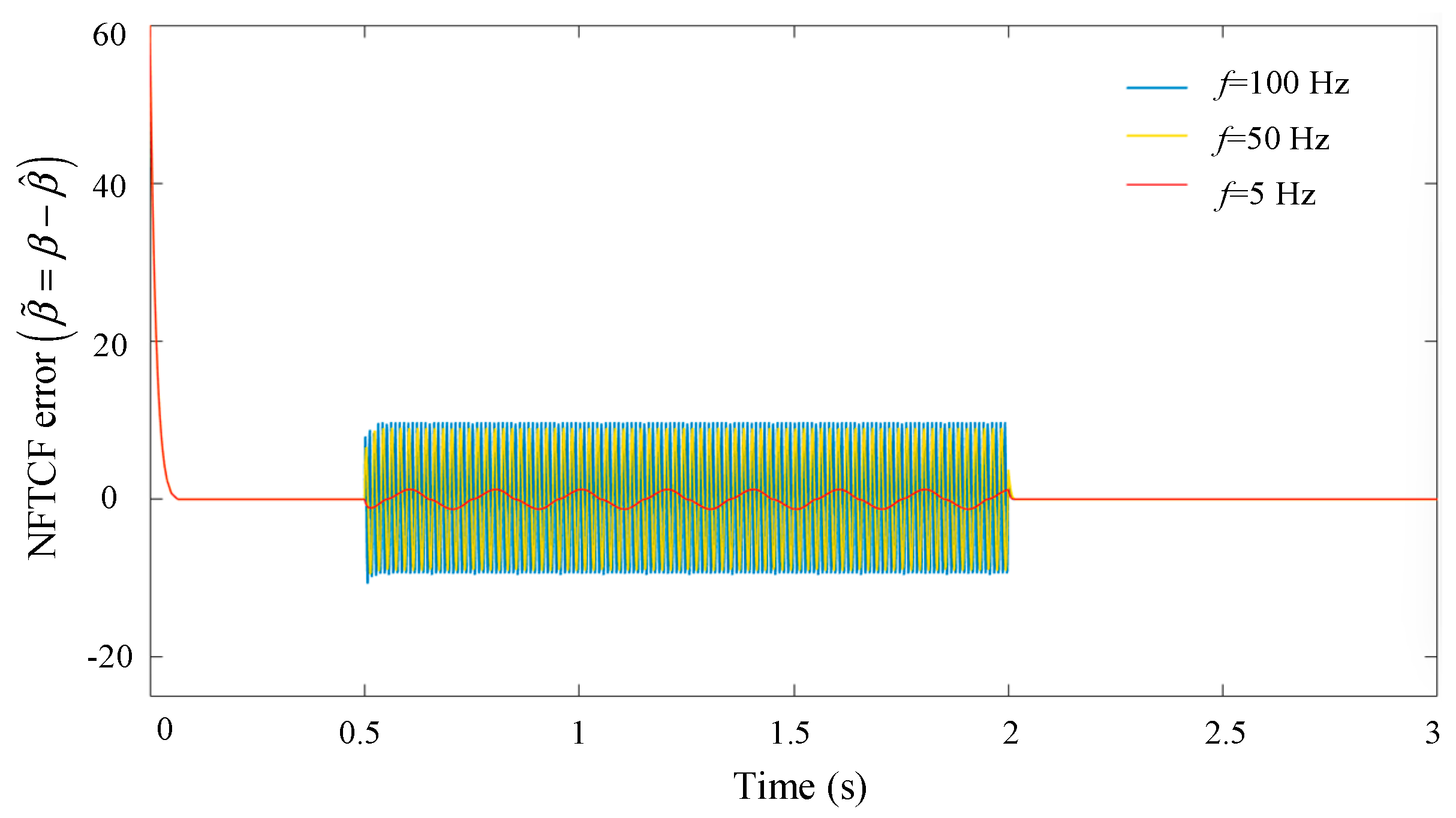
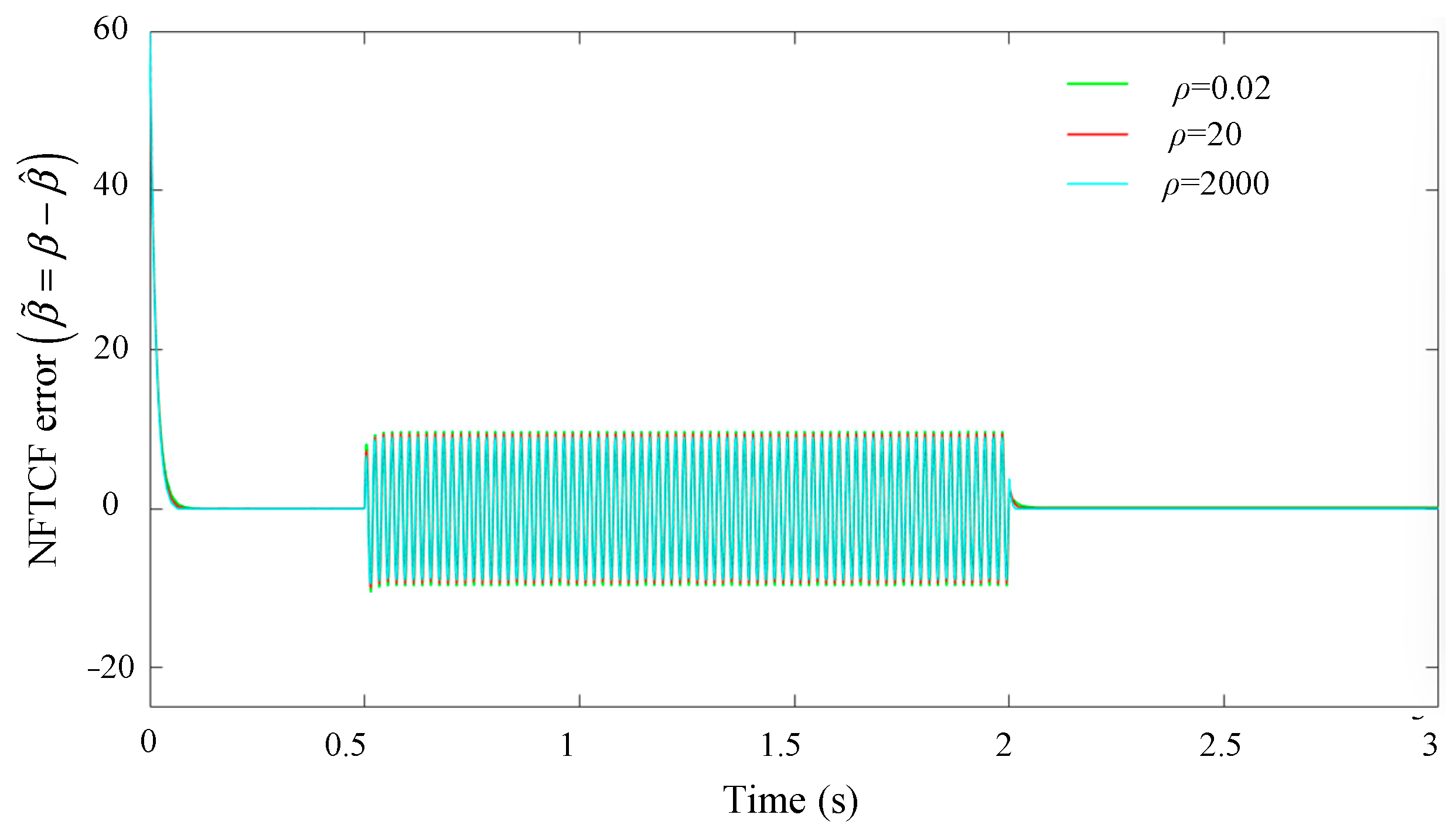
As demonstrated in
Figure 4,
Figure 5,
Figure 6 and
Figure 7, the designed filter demonstrates superior tracking performance in the low-frequency band. Conversely, the tracking error
increases with the frequency of the input signal
β and decreases with the parameters
ρ and
δ. Concurrently, the response speed accelerates.
As demonstrated in
Figure 3 and
Figure 4 and in accordance with Equation (3), the filter exhibits low-pass characteristics, thereby attenuating high-frequency signals more significantly than low-frequency signals. Consequently, in scenarios where the input signal comprises a substantial proportion of high-frequency components, the signal undergoes significant attenuation upon filtration, resulting in increased signal distortion and error.
3.2. Designing Backstepping Sliding Mode Controller
In accordance with the tenets of backstepping sliding mode control theory, the exponentially decaying sliding mode surface is given by the equation , wherein represents the state error, denotes the initial value, and γ is a positive constant. Given that system (2) is an equation in semi-strict feedback form, the objective of employing backstepping control is to effectively eliminate the state variable errors in the rotational speed (w) and current () in system (2) through the feedback mechanism and to achieve high-precision control of the output.
3.2.1. Design of d-q-Axis Voltage Input Controller
In consideration of the second and third equations in the PMSM system (2), the design of the
q-axis current sliding mode function is presented in Equation (10).
where
is a positive constant, speed error
denotes the cross-axis desired virtual current state variable, and
, wherein
and
represent the initial value.
The differential equation of the closed-loop tracking error is derived from the sliding mode function and analyzed using Lyapunov stability theory as outlined below.
It is imperative to consider the Lyapunov candidate function
in Equation (11), wherein
.
The derivation of
is shown in Equation (12).
where
is the q-axis desired virtual current state derivative, and
.
Subsequently, the q-axis voltage input controller is designed as shown in Equation (13).
where
is a positive constant and
represents an estimate of the parameter
, and its design process is given in
Section 3.3.2.
In the absence of consideration of the parameter-adaptive law design (
) and taking
into account in Equation (12), we obtain in Equation (14).
where
.
Upon analysis of the aforementioned integral inequality (14), it becomes evident that if
, when
, there is
. This signifies that
is an invariant set
with respect to
, as illustrated in Equation (15).
The analysis of Equation (15) shows that is subject to the constraint . This observation leads to the conclusion that is bounded. Therefore, when the sliding mode exponential function is utilized as a Lyapunov function, it can be ensured that the system is globally exponentially stable and the q-axis current error will converge to zero in finite time.
Similarly, the d-axis current sliding mode function is designed in Equation (16).
where
is a positive constant and speed error
, wherein
and
represent the initial value. Assume that
.
The differential equation of the closed-loop tracking error is derived from the sliding mode function and analyzed using Lyapunov stability theory as outlined below.
It is imperative to consider the Lyapunov candidate function
in Equation (17), wherein
.
The derivation of
is shown in Equation (18).
where
is the d-axis desired virtual current state derivative, and
.
Subsequently, the
d-axis voltage input controller is designed as shown in Equation (19).
where
is a positive constant and
represents an estimate of the parameter
, and its design process is given in
Section 3.3.2.
In the absence of consideration of the parameter-adaptive law design (
) and taking
into account in Equation (18), we obtain in Equation (20).
where
.
It is evident that an identical analytical process to that delineated in Equation (14) results in the derivation of in Equation (21).
The analysis of Equation (21) shows that is subject to the constraint . This observation leads to the conclusion that are bounded. Therefore, when the sliding mode exponential function is utilized as a Lyapunov function, it can be ensured that the system is globally exponentially stable and the d-axis current error will converge to zero in finite time.
3.2.2. Designing a Virtual Current Filter Controller
Given the first equation of the PMSM system (2), the function
of the speed sliding mode is designed as expressed in Equation (22).
where
is a positive constant, speed error
, wherein
denotes the given desired reference speed input.
, wherein
and
denotes the initial value.
The differential equation of the closed-loop tracking error is derived from the sliding mode function and analyzed using Lyapunov stability theory as outlined below.
It is imperative to consider the Lyapunov candidate function
in Equation (23), wherein
.
The derivation of
is shown in Equation (24).
where the cross-axis current error
, wherein cross-axis current virtual control
is designed as
.
Subsequently, the virtual current filtering control
signal is designed as shown in Equation (25).
where
is an estimate of
D, and its design process is given in
Section 3.3.1.
In the absence of consideration of the parameter-adaptive law design (
) and the disturbance estimation design (
) and taking
into account in Equation (24), we obtain in Equation (26).
where
.
It is evident that an identical analytical process to that delineated in Equation (14) results in the derivation of in Equation (27).
The analysis of Equation (27) shows that is subject to the constraint . This observation leads to the conclusion that are all bounded. Therefore, when the sliding mode exponential function is utilized as a Lyapunov function, it can be ensured that the system is globally exponentially stable and the speed error will converge to zero in finite time.
3.3. Designing NSMO and UPAL
3.3.1. Designing Exponential Nonlinear Sliding Mode Observer
A nonlinear function is introduced for the NSMO to estimate the load torque, and the design is shown in Equation (28).
where
is actually designed according to the need for a nonlinear function, and
is a bounded function, wherein
is designed to resist the perturbation caused by changes in the external environment, and is required to satisfy
. The values of
Gmin and
Gmax are both constants, with values greater than zero.
The selection of an appropriate nonlinear gain function enables the embedding of both linear and nonlinear dynamics into the motor system (2), while simultaneously suppressing the impact of disturbances originating from within and outside the system. Consequently, the sliding mode is identified as the optimal nonlinear gain function for the NSMO. Its block diagram is illustrated in
Figure 8.
The error equation for the NSMO is shown in Equation (29).
The nonlinear sliding mode observer, designed using the closed-loop tracking differential Equation (29), has been proven to be globally exponentially stable.
It is imperative to consider the Lyapunov candidate function
, with the derivation of
shown in Equation (24).
Substituting Equation (29) into Equation (30) yields in Equation (31).
where
.
The disturbances
and their first-order derivatives
in the system are bounded, continuous, and differentiable. It is evident that an identical analytical process to that delineated in Equation (14) results in the derivation of in Equation (32).
An analysis of Equation (32) reveals a limitation of by . Consequently, it can be deduced that is bounded. This indicates that the system can be ensured to be globally exponentially stable, and the parameter error can converge to zero in a finite time.
The nonlinear function
is designed in accordance with the specifications set forth in Equation (33).
where
are all positive constants. Assume that
In light of the fact that
D(
t) represents a random white noise interfering signal, the bounded input signal
w(
t) is illustrated in Equation (34).
In order to validate the soundness of the NSMO designed in this paper, a simulation model was constructed in accordance with the specifications set forth in Equation (29). The fundamental principles underlying the NSMO design were then subjected to a simulation verification process, the results of which are presented in subsequent figures.
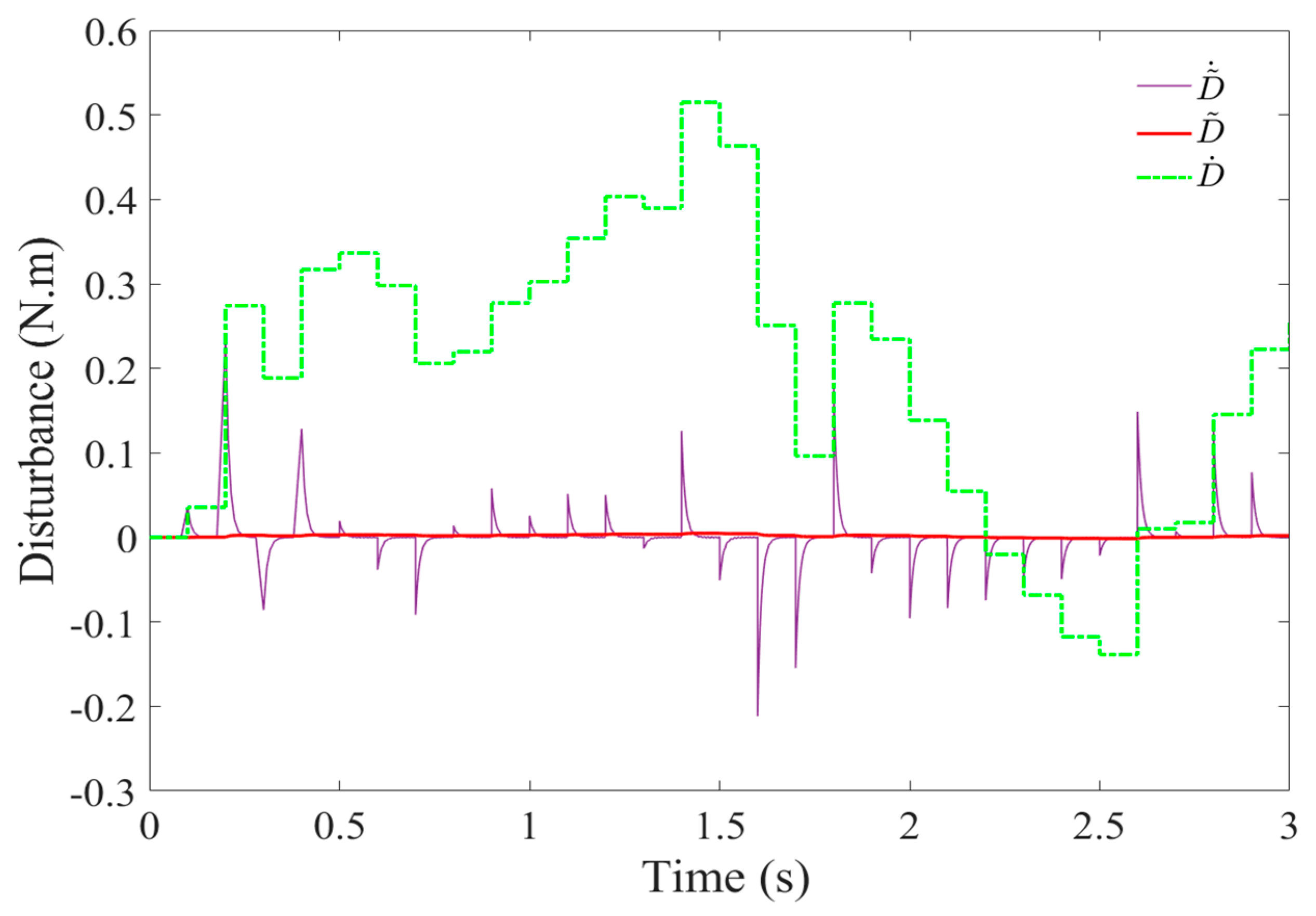
As illustrated in
Figure 9, the error
of the NSMO rapidly approaches 0 at the initial stage of the simulation and subsequently stabilizes. Concurrently, the error Equation (29),
, exhibits fluctuations around 0, attributable to the impact of the input disturbance signal
. Notably, the first-order derivative of the NSMO is constrained at the commencement of the simulation period. Additionally,
Figure 9 demonstrates that the first-order derivative
of the interfering signal
remains within certain limits during the simulation time, thereby validating the practicality of the NSMO and nonlinear function
design.
3.3.2. Designing μ1,μ2 Parameter-Adaptive Law
In the absence of consideration of the filter design (
) and the disturbance estimation design (
), integrating the equations listed in footnotes (13), (19), and (25) with respect to the derivative of Equation (23) results in
where
is an error of
, which is an error of
The adaptive law for parameter
is designed as shown in Equation (36).
where
are symmetric positive definite matrices.
and
, wherein
and
are all positive constants, and
.
As illustrated in
Figure 2, Equations (28) and (36) demonstrate a clear relationship between an increase in the external perturbation of the system and the subsequent effect on the system output
w. This, in turn, exerts an influence on the input of the motor d-q-axis voltages, thereby inducing parametric instability in the motor. The development of an adaptive law (UPAL) to counteract system instability due to variations in motor current and voltage, resulting from disturbances, constitutes a pivotal approach to ensure operational stability and reliability.
It is imperative to consider the Lyapunov candidate function
in Equation (37), wherein
.
The derivation of
is shown in Equation (38).
The application of
to Equation (38) results in Equation (39).
where
.
It is evident that an identical analytical process to that delineated in Equation (14) results in the derivation of in Equation (40).
A thorough examination of Equation (40) reveals a limitation of by . Consequently, it can be deduced that are bounded. This indicates that the system can be ensured to be globally exponentially stable, and the parameter error can converge to zero in a finite time.
4. Stability Proof
For the purposes of facilitating the proof and analysis, the following assumptions are posited with respect to the desired trajectory wref(t):
Assumption 1. The requisite reference input trajectories wref(t) and their derivatives are bounded, continuous, and known.
Assumption 2. The disturbances and their first-order derivatives in the system are bounded, continuous, and differentiable, and have positive constants.
Assumption 3. The designed composite filters and their derivatives are known to be bounded, continuous, and well defined.
In an analysis of the stability of a specific nonlinear system, Lyapunov theory provides an effective method to solve the problem of nonlinear system stability that cannot be addressed by the stability criteria in classical control theory (e.g., algebraic criterion, Laws criterion, root-trajectory method, etc.). According to the Lyapunov theory of the energy stability of systems, all controllers in the entire control system, including the designed NSMO and UPAL, are taken into account. The stability of the AFTCFBC is thus proven and analyzed in detail.
The Lyapunov candidate function
is selected in accordance with the specifications outlined in Equation (41).
The derivation of
is shown in Equation (42).
The result of combining the solutions to Equations (3), (7), (19), (25), (29) and (35) with Equation (42) is shown in in Equation (43).
The simplified Equation (43), derived from the premises of Lemma 1, is thus written as in Equation (46).
Ultimately, the simplification is represented by Equation (45).
where
are constant, with
and
.
Upon analysis of the aforementioned integral Equation (45), it becomes evident that if
, when
, there is
. This signifies that
is an invariant set
with respect to
, as illustrated in Equation (46).
It is evident that V(t) is subject to the constraint ϕ. This observation leads to the conclusion that and are bounded. When this result is considered in conjunction with the finite-time stability theorem for nonlinear systems, it becomes evident that system (2) is finite-time-stable in the designed controller.








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}