1. Introduction
As artificial intelligence advances, control systems, and control tasks have become increasingly complex and diverse. A solitary intelligent agent typically faces significant challenges in meeting the predefined requirements and attaining the established goals. Inspired by biological swarm phenomena [
1], scholars have proposed the concept of multi-agent systems. Multi-agent systems can jointly complete complex tasks, which a single system cannot accomplish, through cooperation and coordination, thus cutting down costs and improving execution efficiency. Currently, research in multi-agent systems has achieved rich theoretical results, which have been widely applied in engineering practice. Among them, the realization of consensus, which has the typical characteristics of aggregation behavior, has become a research hotspot. It includes multi-robot cooperative assembly [
2], intelligent traffic scheduling [
3], aircraft formation [
4], autonomous driving [
5], etc.
To date, some achievements have been made in the research on the consensus control for multi-agent systems in the presence of actuator malfunctions and sensor faults [
6,
7,
8]. However, study on the fault-tolerant consensus of heterogeneous multi-agent systems is relatively scarce. References [
9,
10,
11] provide fault detection and fault-tolerant consensus control methods for distributed multi-agent systems. The leader–follower multi-agent systems have the advantages of high execution efficiency and low energy consumption compared with the distributed multi-agent systems. References [
12,
13,
14] provide a fault-tolerant consensus or formation methods for leader–follower multi-agent systems with a single leader or multiple leaders, but these methods cannot achieve the optimal fault-tolerant effect. Reference [
15] explores sensor fault-tolerant strategies, actuator reconfiguration problems, and the unsolved scientific issues of the multi-unmanned undermarine vehicle system. References [
16,
17,
18], respectively, provide fault-tolerant methods for multiple UAVs, multiple USVs, and multiple UUVs, but they do not combine the three into a heterogeneous system or propose a fault-tolerant method. Reference [
19] proposes a joint design scheme of UAVs, USVs, and UUVs to solve the target hunting problem, but this method does not consider the fault-tolerance issue. Reference [
20] proposes a control allocation method to solve a kind of optimal problem, but it has not been applied to the consensus control problem when the actuator malfunctions in a heterogeneous multi-agent system. References [
21,
22], respectively, designed a model of a predictive fault-tolerant controller and a fuzzy adaptive optimal fault-tolerant controller for addressing the actuator fault issues of underwater vehicles. However, the fault-tolerant efficiency of these methods still needs to be improved. Reference [
23] proposed an optimal fault-tolerant control method based on neural networks and dynamic event-triggered conditions for solving the fault-tolerant problem of underwater vehicles. Nevertheless, as the types and quantities of agents increase, the computational burden of the neural network structure greatly increases. As a result, the fault-tolerant effect for various types of agents on aerial–marine surfaces and submarines will be significantly reduced. Owing to the harsh working environment of the air–marine surface–submarine system, malfunctions occur frequently, making it impossible to guarantee consensus. This paper aims to establish a leader–follower system and design a consensus controller for three different types of agents, namely those operating in the air, on the sea surface, and underwater. This ensures that these agents can achieve optimal consensus in all states, even when there are partial actuator failures and interruption faults.
This paper makes contributions in three ways: Firstly, by combining the control allocation algorithm, an HMAS model of the leader–follower, including for multiple UAVs, multiple USVs, and multiple UUVs, is constructed. Secondly, by combining the control allocation algorithm, optimal control method, and FTC method, an optimal FTC control method is proposed. This method not only improves the system’s adaptability to faults but also optimizes the control performance under fault conditions. Thirdly, an optimal FTC consensus protocol for the leader–follower HMAS under partial actuator failure and interruption faults is proposed, ensuring the operation and stability of the HMAS.
The rest of this paper is arranged as follows: In
Section 2, preliminary knowledge is introduced and relevant lemmas are presented.
Section 3 constructs a mathematical model for the leader–follower HMAS composed of UAVs, USVs, and UUVs. Based on this model, an optimal FTC consensus protocol is designed. Through systematic application of Lyapunov stability theory, the asymptotic stability of the closed-loop system under the proposed control protocol is rigorously proven, providing theoretical guarantees for multi-domain cooperative missions.
Section 4 conducts simulation experiments to verify the effectiveness of the control protocol and the feasibility of the control strategy. Finally,
Section 5 summarizes the core content of this paper.
4. Simulation
In this section, three sets of simulations are carried out in this paper. The first set of simulations is a performance comparison experiment between the algorithm proposed in this paper and the traditional FTC algorithm, aiming to illustrate the superiority of the algorithm proposed in this paper in terms of performance. The second set of experiments is a simulation of the consensus control strategy without a fault-tolerance mechanism under fault conditions, aiming to clarify the advantages of the FTC mechanism. Finally, another set of fault scenarios is selected, and the universality of the proposed algorithm is demonstrated by expanding the scope of experimental scenarios.
The correlation coefficient matrix designed for this experiment is the following:
The following failure coefficient scenarios are set for this experiment. (When all diagonal elements of the failure matrix are less than 1, partial actuator failure occurs; if any diagonal element equals 1, it is determined as an actuator interruption failure):
MATLAB 2020b simulations are used to test the protocol. The initial values of all agents are given in the following
Table 1:
The control protocol proposed in this paper is applied to the leader–follower heterogeneous system composed of UAVs, USVs, and UUVs, and the simulation results are denoted as experimental group (a). The traditional distributed optimal FTC protocol is applied to the same leader–follower HMAS for simulation, and the corresponding results are denoted as control group (b). The two groups of experiments adopt the same parameters, the initial values of each intelligent agent are shown in
Table 1. and the comparison of the results is shown in the figure:
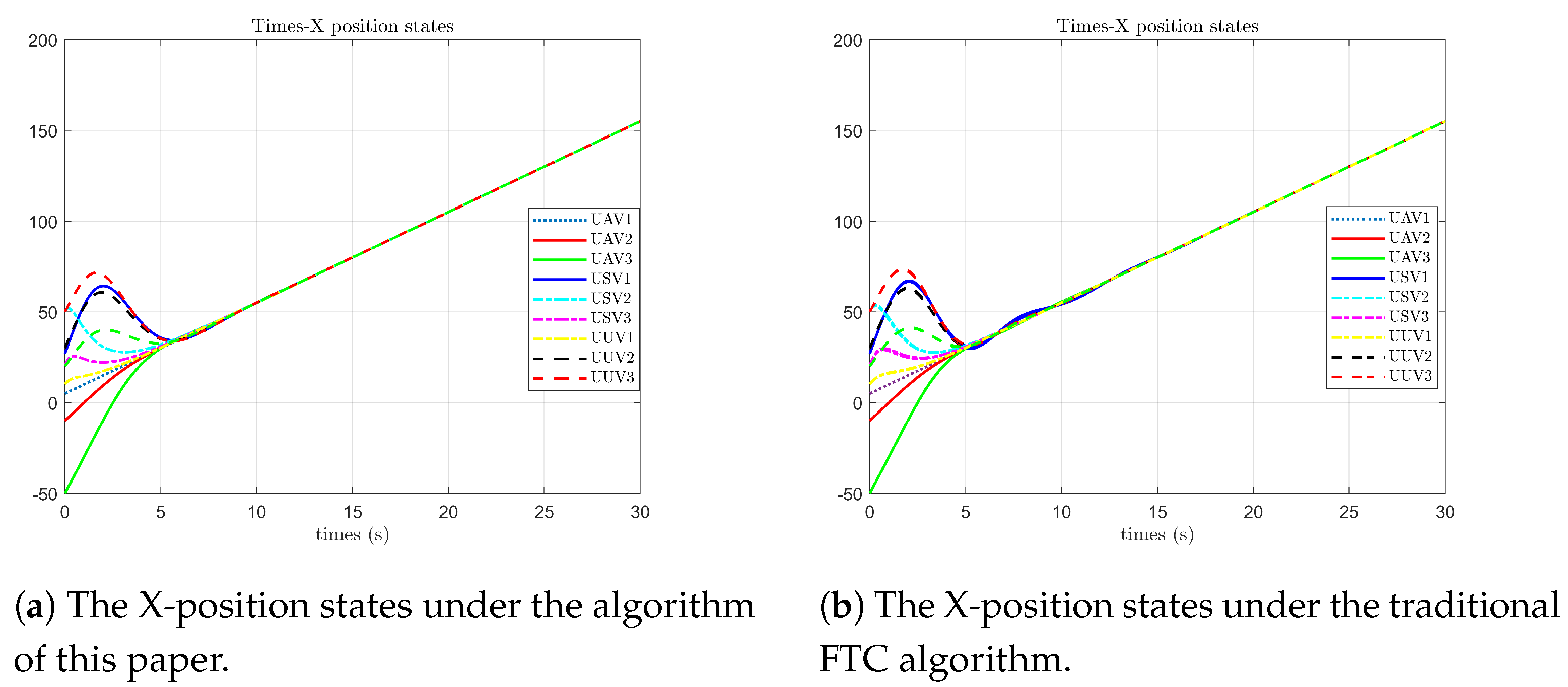
As shown in
Figure 4, (a) is the simulation diagram of the algorithm proposed in this paper, and (b) is the simulation diagram of the optimal fault-tolerant algorithm. The simulation results indicate that under the algorithm proposed in this paper, the position states of each follower agent on the X-axis first reach agreement with the leader’s state at 5 s and still fluctuate within a small range due to the influence of faults from 5 s to 8 s. In contrast, under the optimal fault-tolerant algorithm, the position states of each follower agent on the X-axis also first reach agreement at 5 s but fluctuate significantly due to the influence of faults from 5 s to 13 s.
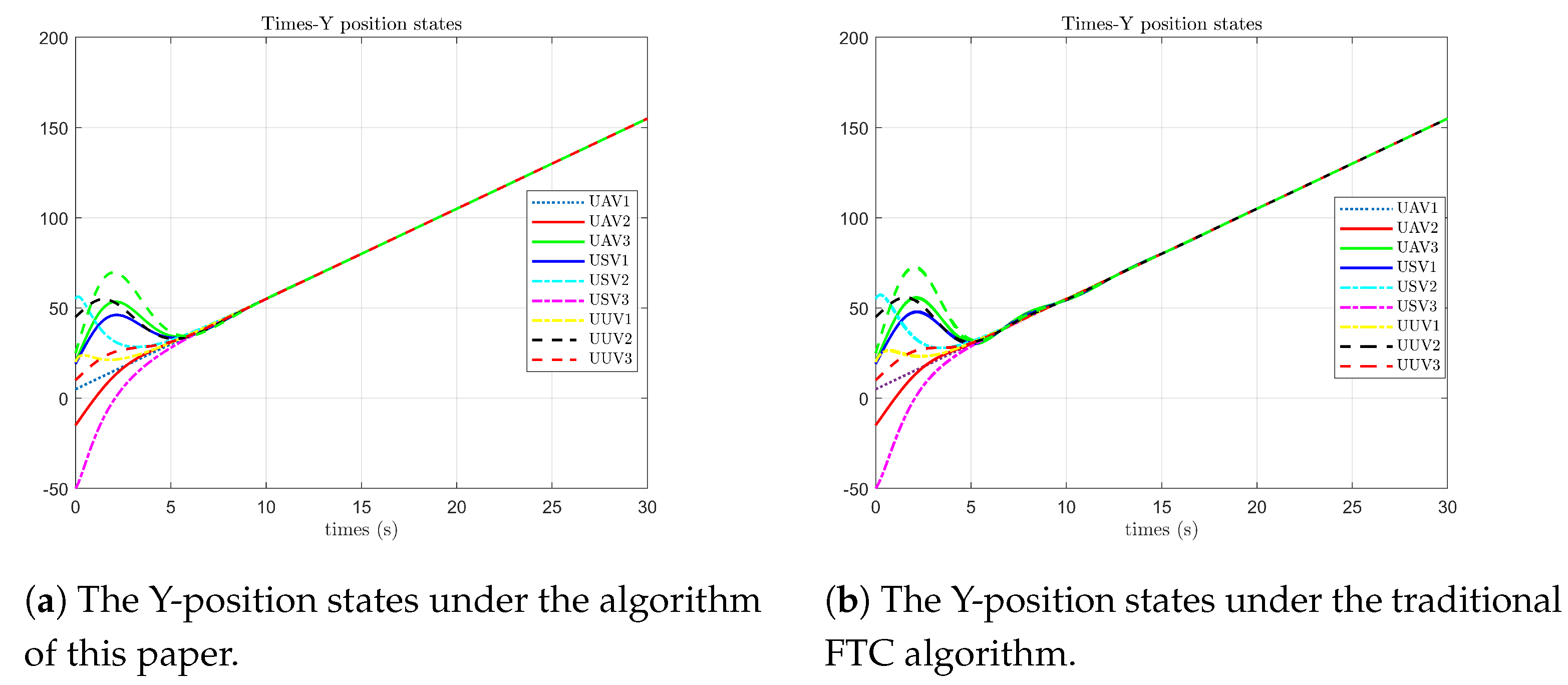
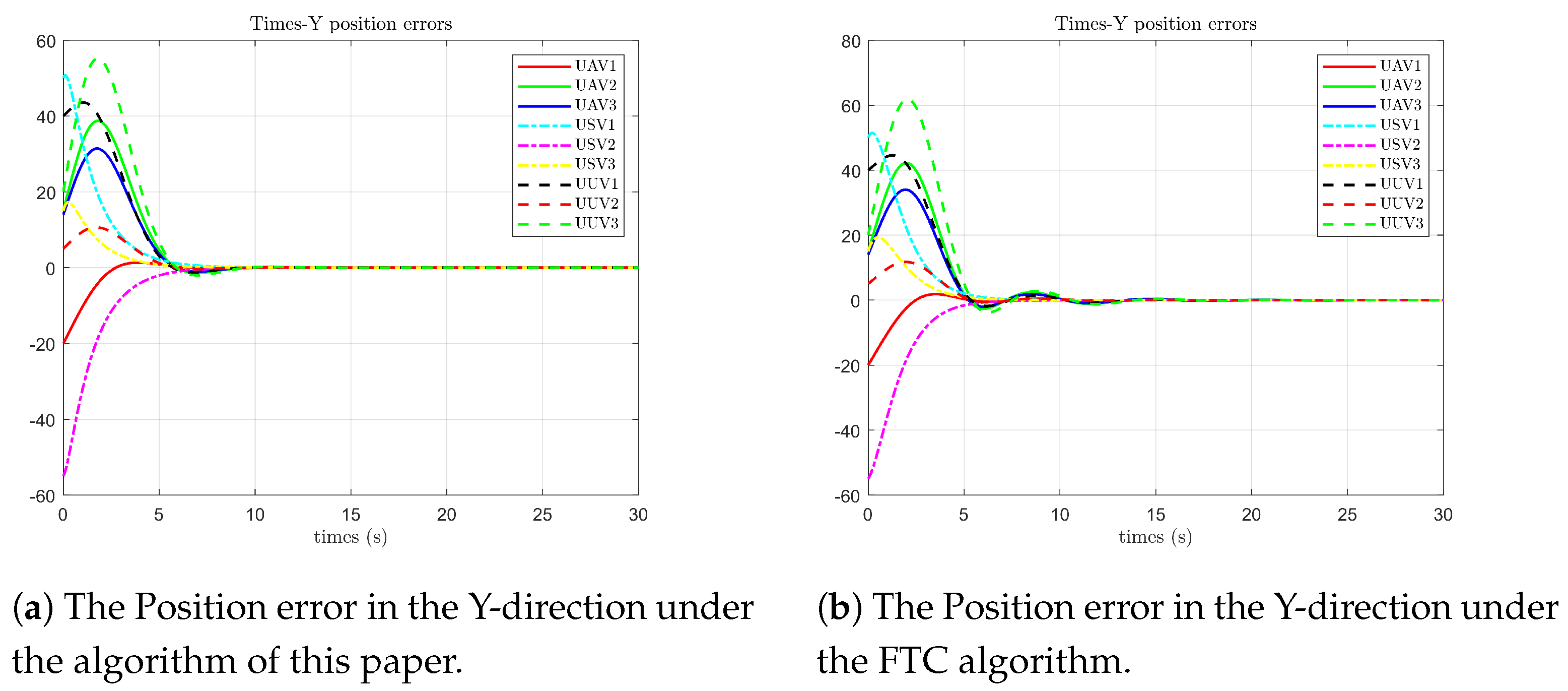
As shown in
Figure 5, under the algorithm proposed in this paper, the position states of each follower agent on the Y-axis first reach agreement with the leader’s state at 6 s and still fluctuate within a small range due to the influence of faults from 7 to 8 s. In contrast, under the optimal fault-tolerant algorithm, the position states of each follower agent on the Y-axis first reach agreement at 5 s but fluctuate significantly due to the influence of faults from 7 to 11 s.
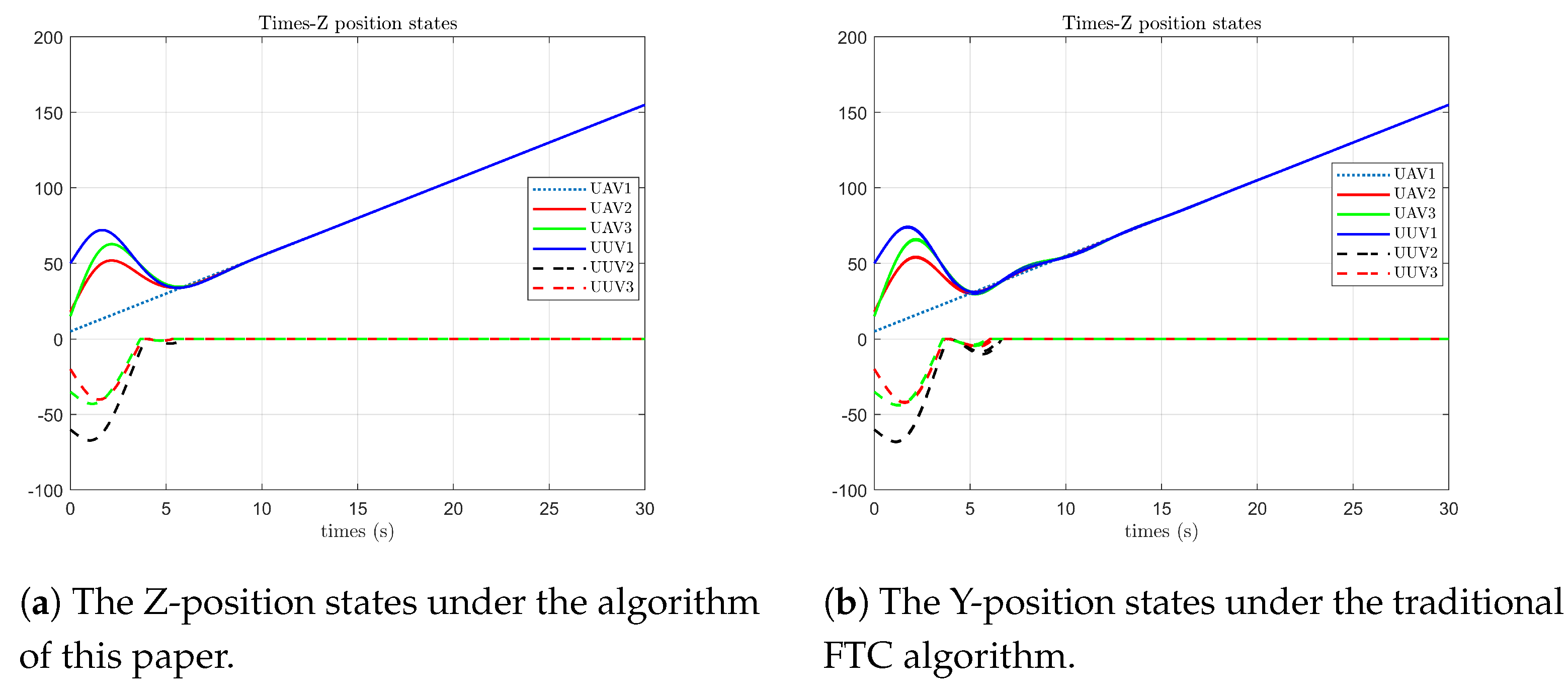
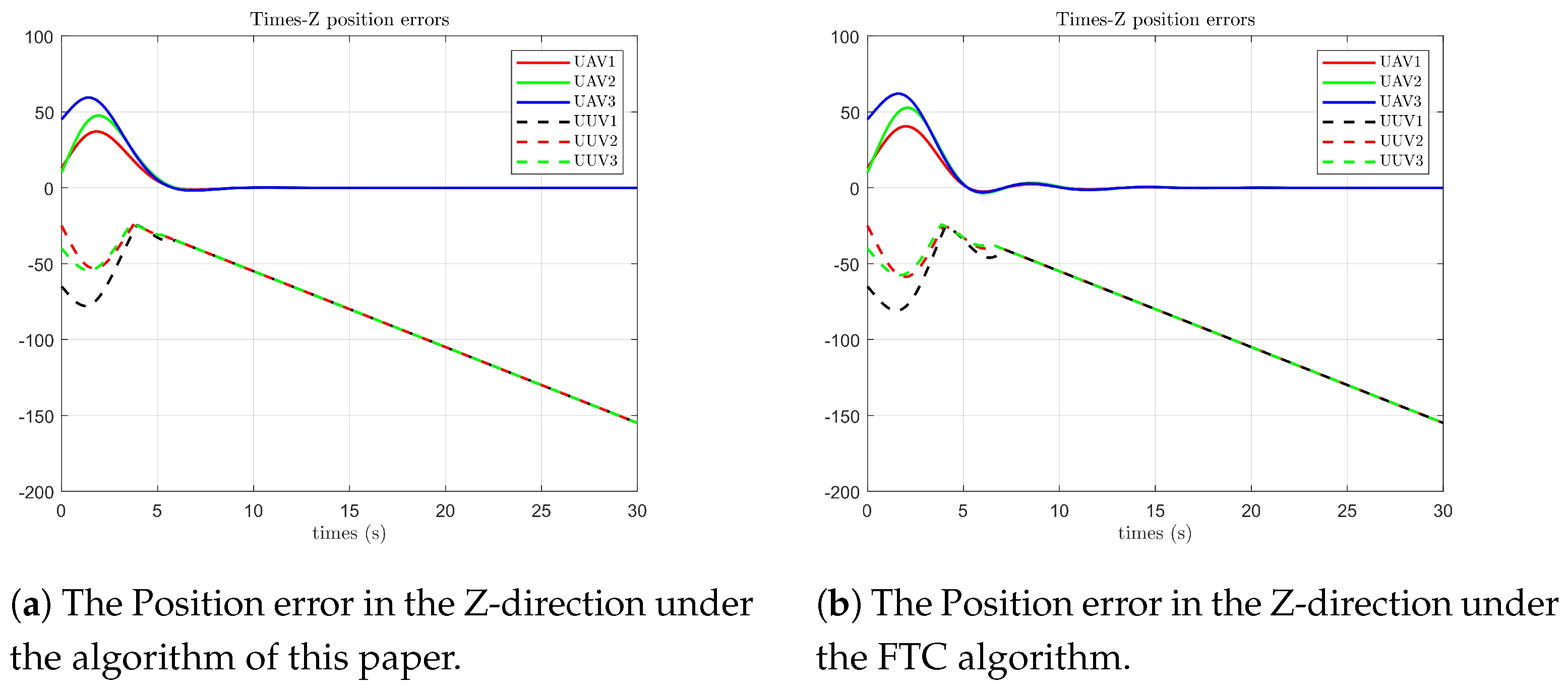
As shown in
Figure 6, under the algorithm proposed in this paper, the position state of the follower UAV on the Z-axis reaches agreement with the leader’s state at 6 s. The position state of the follower UUV on the Z-axis is 0 at 4 s (at this time, it is operating at the horizontal plane). The follower UAV still has small-range fluctuations due to the influence of faults from 6 to 7 s, and the follower UUV has small-range fluctuations from 4 to 6 s. In contrast, under the optimal fault-tolerant algorithm, the position state of the follower UAV on the Z-axis reaches agreement with the leader’s state at 5 s. The position state of the follower UUV on the Z-axis is 0 at 4 s. The follower UAV fluctuates significantly due to the influence of faults from 5 to 13 s, and the follower UUV fluctuates significantly from 4 to 7 s.
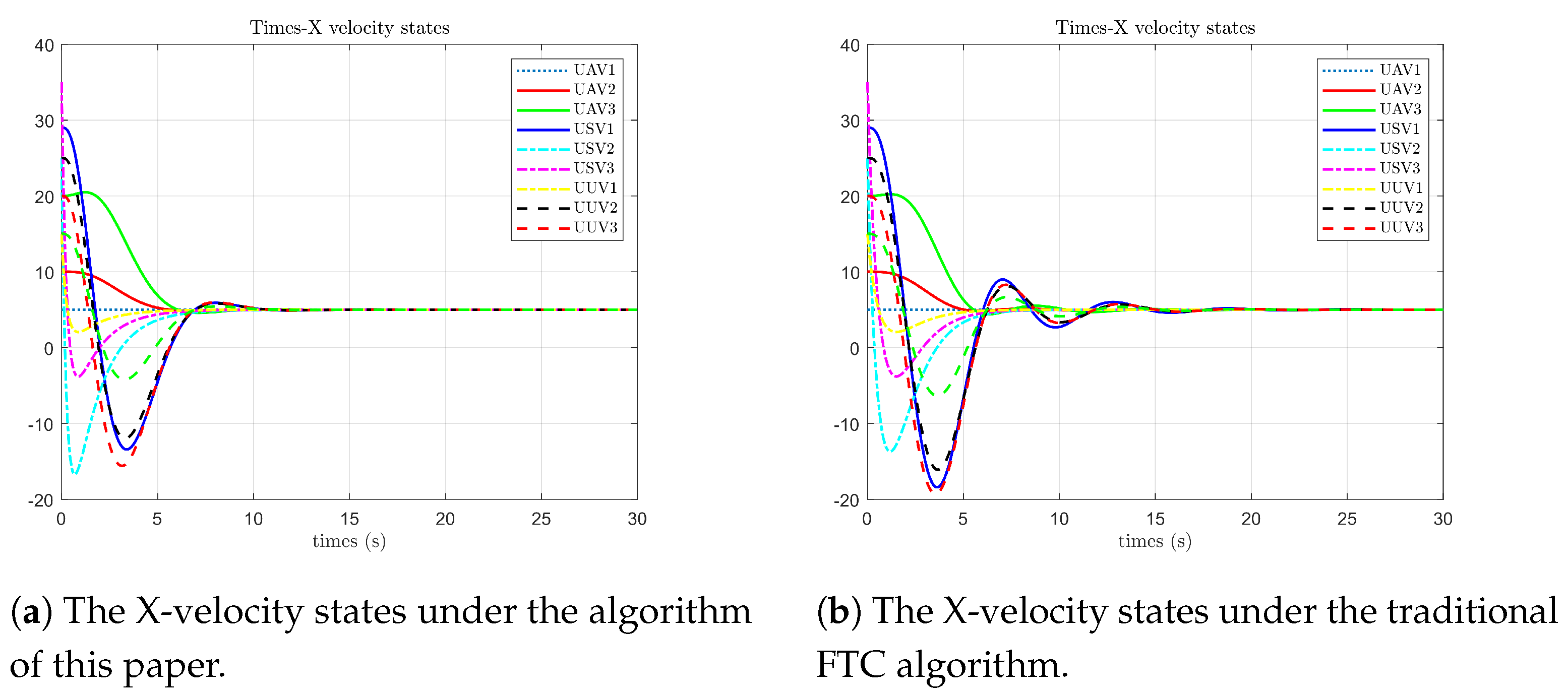
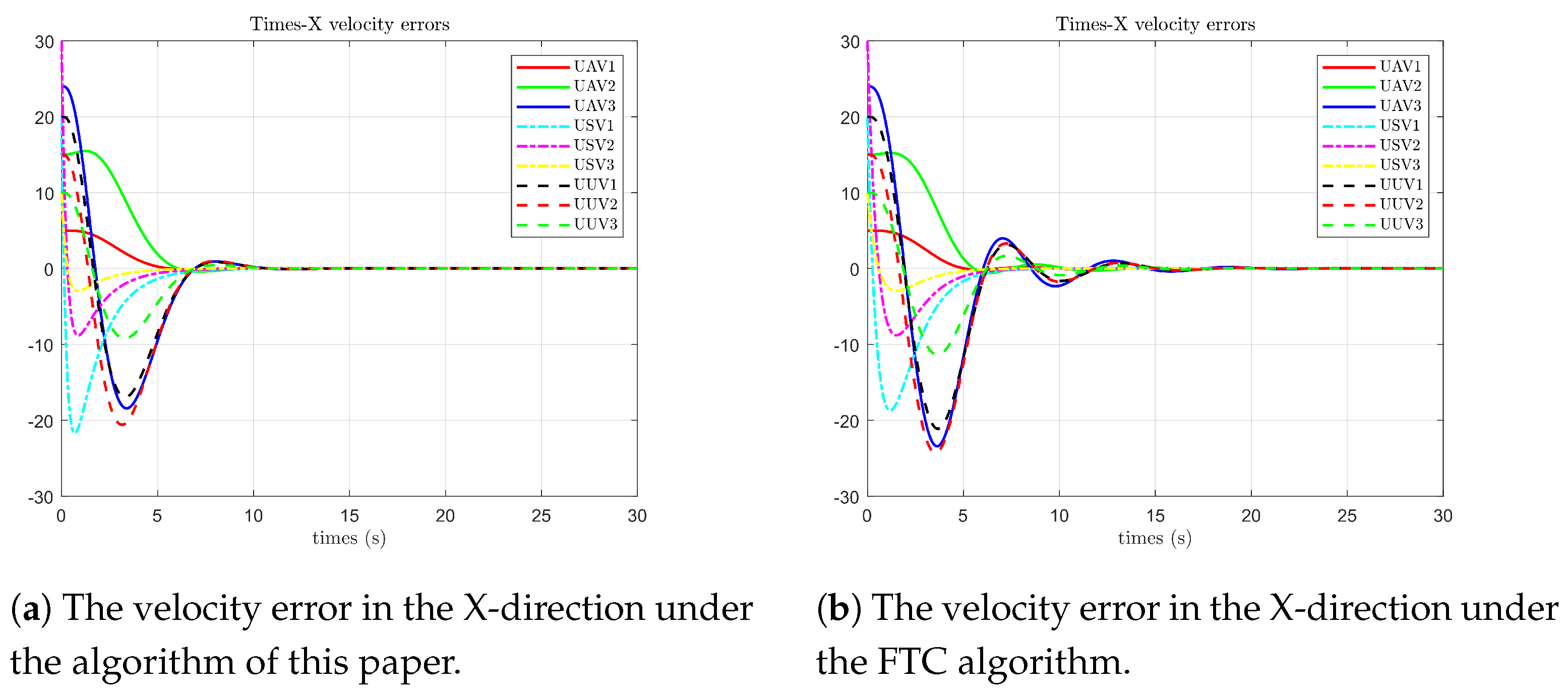
As shown in
Figure 7, under the algorithm proposed in this paper, the velocity states of each follower agent on the X-axis first reach agreement with the leader’s state at 7 s. Due to the influence of faults, they still fluctuate within a small range from 7 s to 10 s. In contrast, under the optimal fault-tolerant algorithm, the velocity states of each agent on the X-axis first reach agreement at 6 s. The frequency and amplitude of the fluctuations affected by faults are relatively large, from 6 s to 17 s.
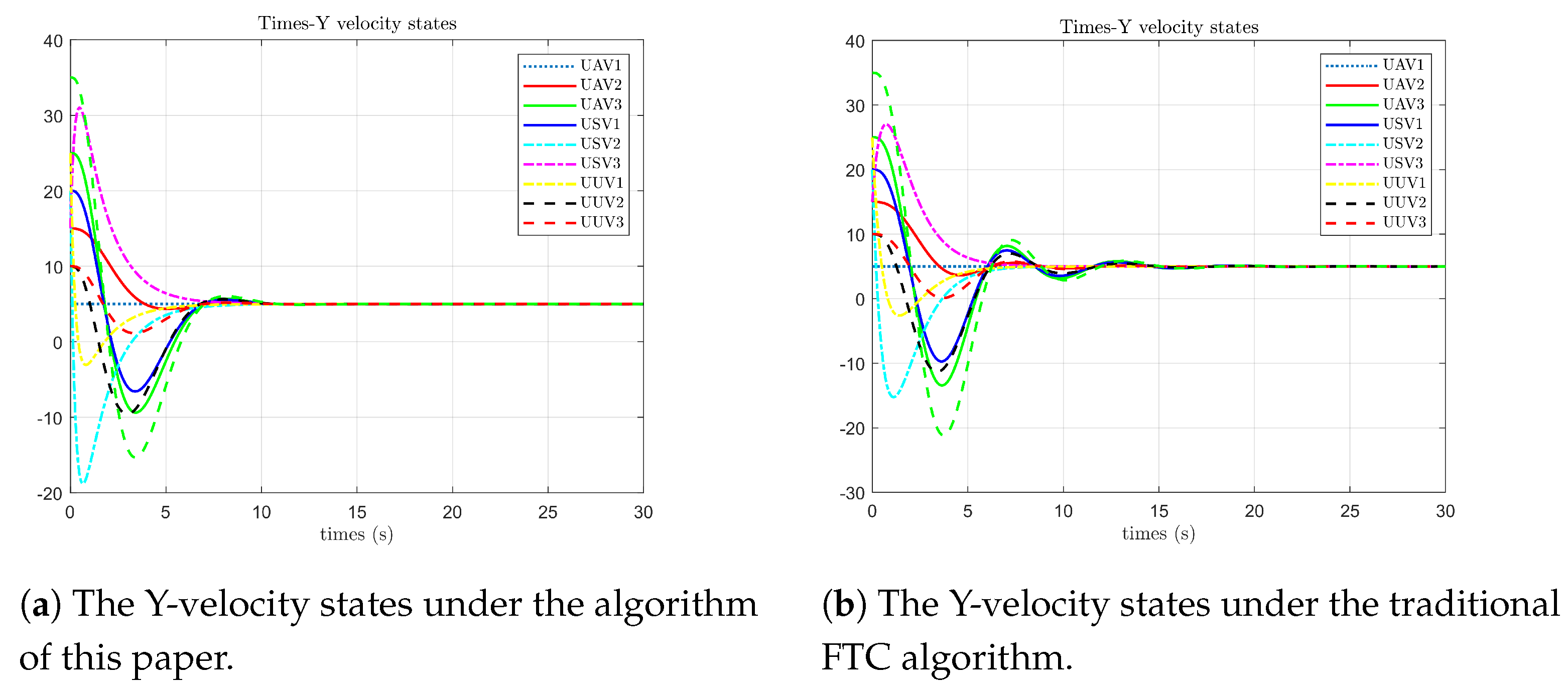
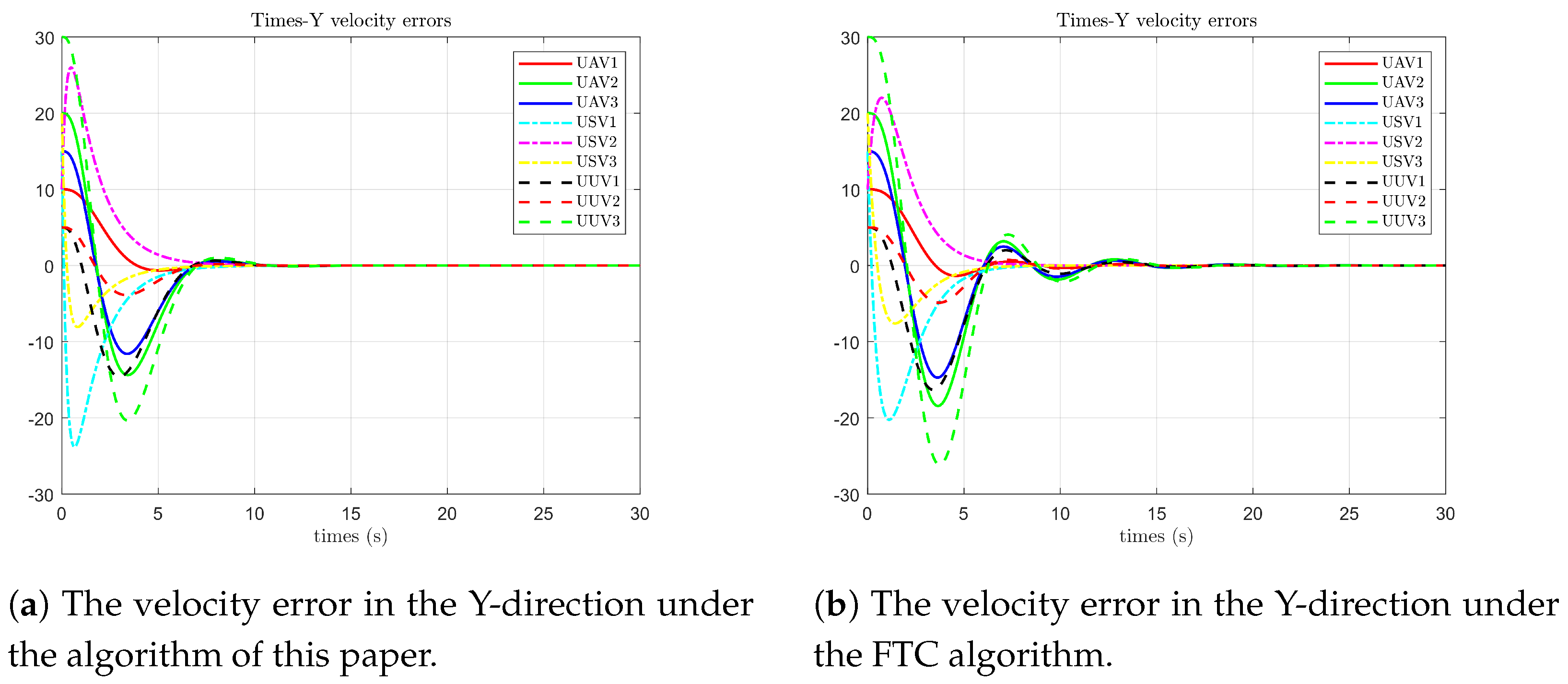
As shown in
Figure 8, under the algorithm proposed in this paper, the velocity states of each follower agent on the Y-axis first reach agreement with the leader’s state at 7 s. From 7 to 10 s, they still fluctuate within a small range due to the influence of faults. In contrast, under the optimal fault-tolerant algorithm, the velocity states of each agent on the Y-axis first reach agreement at 6 s. From 6 to 18 s, both the frequency and amplitude of the fluctuations are relatively large due to the influence of faults.
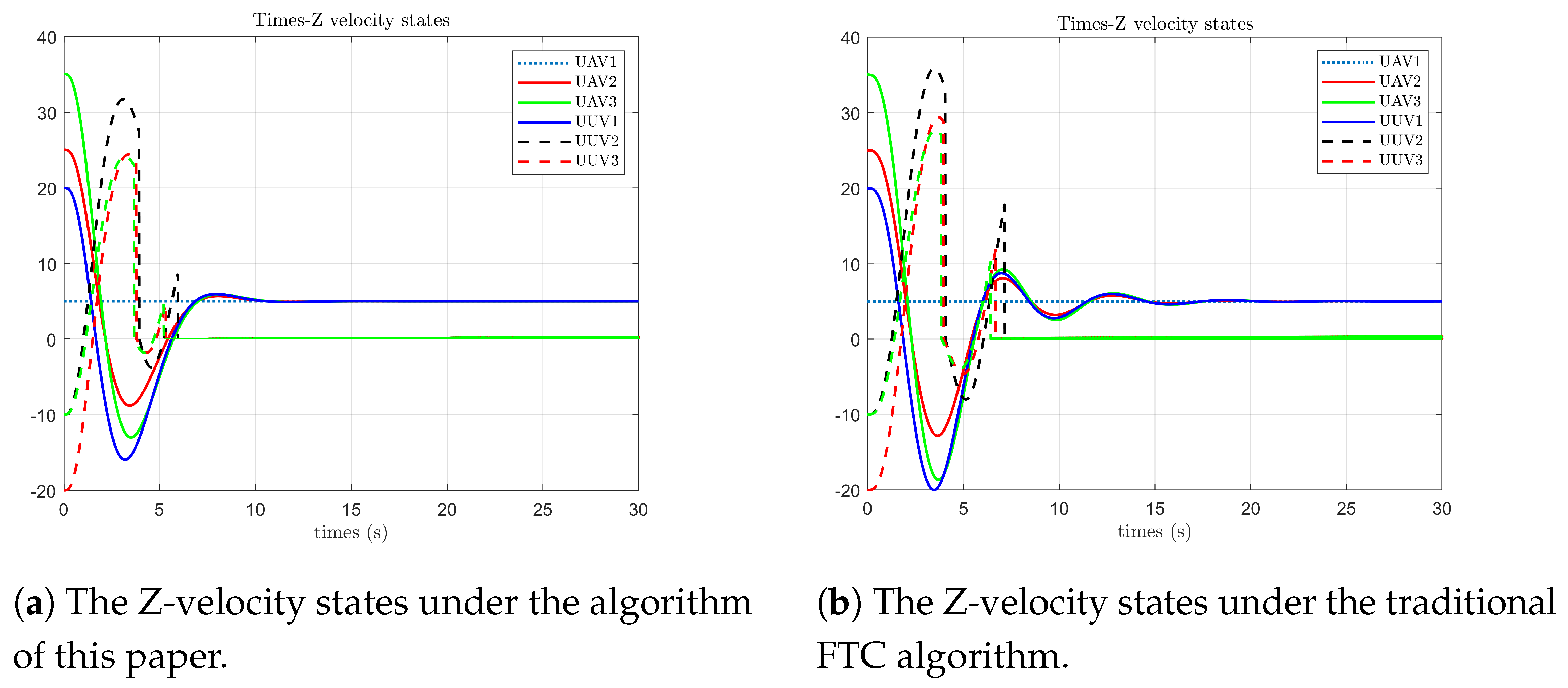
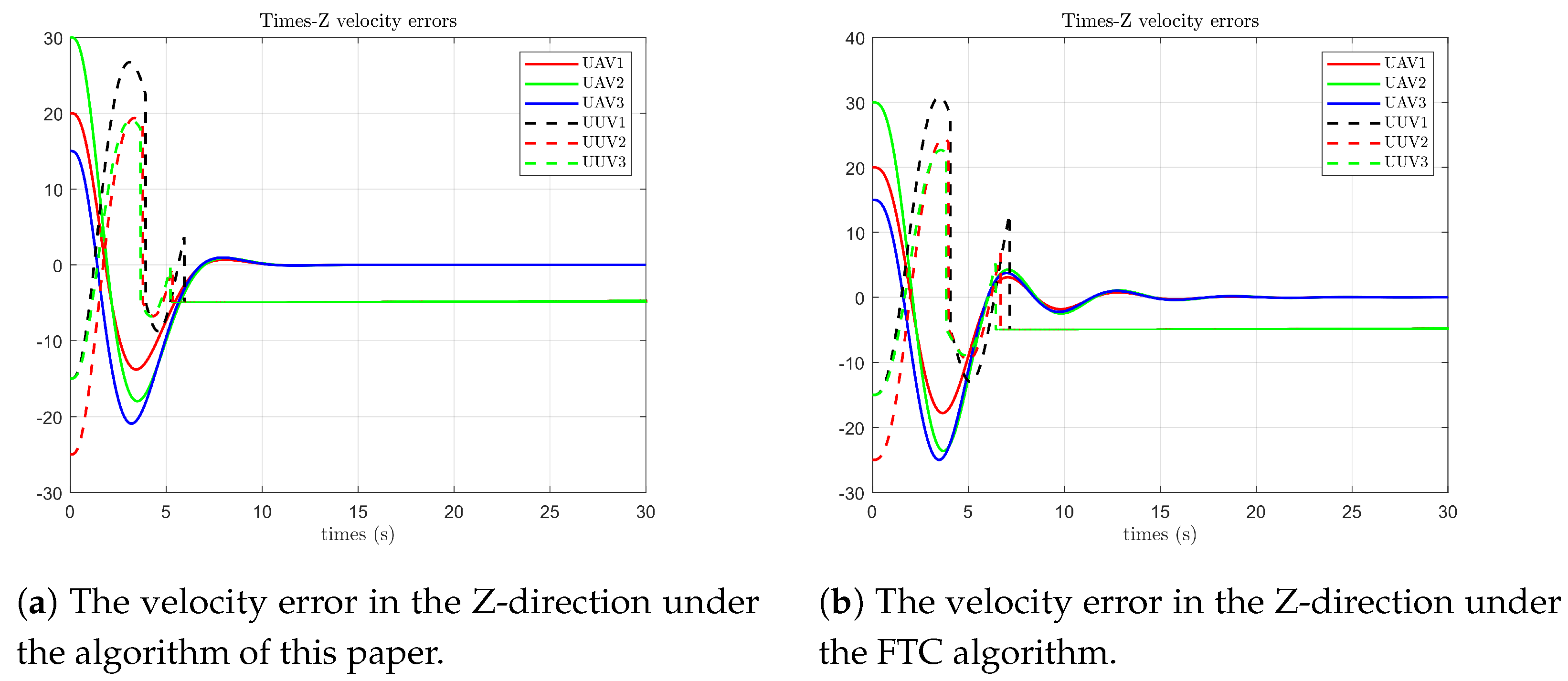
As shown in
Figure 9, under the algorithm proposed in this paper, the velocity state of the follower UAV on the Z-axis first reaches agreement with the leader’s state at 6 s. The velocity state of the follower UUV on the Z-axis is 0 at 6 s (at this time, it is operating in the horizontal plane), and the follower UAV still has small-range fluctuations from 6 to 10 s. In contrast, under the optimal fault-tolerant algorithm, the position state of the follower UAV on the Z-axis first reaches agreement with the leader’s state at 6 s. The velocity state of the follower UUV on the Z-axis is 0 at 6 s, and the follower UAV experiences a relatively large number of fluctuations with larger amplitudes from 6 to 18 s due to the influence of faults. Through comparison, it can be seen that when the algorithm proposed in this paper is applied to the aerial–marine surface submarine system, it has better real-time performance. Under the influence of faults, it has fewer state fluctuations, smaller amplitudes, fast convergence, and superior performance.
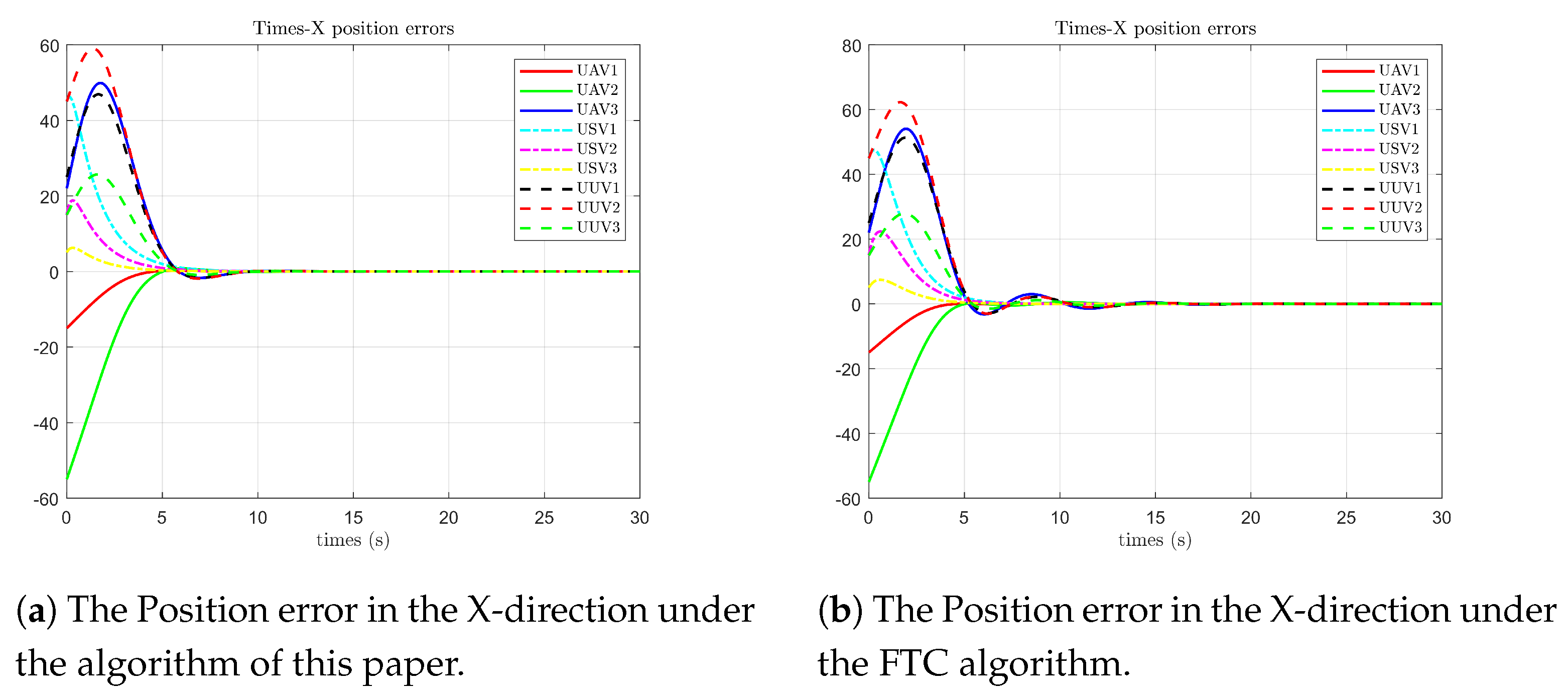
As shown in
Figure 10, under the algorithm proposed in this paper, the position error states of each follower agent on the X-axis first reach 0 compared with the leader’s state at 6 s. From 6 to 9 s, due to the influence of faults, there is only one fluctuation, with the maximum peak value being 3. In contrast, under the optimal fault-tolerant algorithm, the position error states of each agent on the X-axis first reach 0 at 5 s. From 5 to 11 s, due to the influence of faults, there are four fluctuations, with the maximum peak value being 8.
As shown in
Figure 11, under the algorithm proposed in this paper, the position error states of each follower agent on the Y-axis first become zero compared with the leader’s state at 6 s. From 6 to 9 s, there is one fluctuation with a maximum peak value of −2 due to the influence of faults. However, under the optimal fault-tolerant algorithm, the position error states of each agent on the X-axis first become zero at 5 s. From 5 to 15 s, affected by the faults, these states fluctuate three times, with a maximum peak value of 5.
As shown in
Figure 12, under the algorithm proposed in this paper, the position error state of the follower UAV on the Z-axis first becomes 0 compared with the leader’s state at 6 s. Affected by the fact that the UUV cannot break away from the water surface, the position error state of the follower UUV on the Z-axis is relatively consistent with that of the leading UAV at 4 s (it is operating on the horizontal plane at this time). The position error state of the follower UAV still has small-scale fluctuations within 5 to 7 s, while there is no fluctuation for the UUV. Under the optimal fault-tolerant algorithm, the position error state of the follower UAV on the Z-axis first becomes 0 compared with the leader’s state at 5 s. The position state of the follower UUV on the Z-axis is first relatively consistent with that of the leading UAV at 4 s. The follower UAV is affected by faults and has more frequent fluctuations with larger amplitudes within 5 to 14 s. The follower UUV is affected by faults and experiences a fluctuation with a relatively large amplitude within 4 to 7 s.
As shown in
Figure 13, under the algorithm proposed in this paper, the velocity error states of each follower agent on the X-axis first become 0 compared with the leader’s state at 6 s. From 6 to 10 s, due to the influence of faults, there is still one fluctuation, with the maximum peak value being 2. However, under the optimal fault-tolerant algorithm, the velocity error states of each follower agent on the X-axis first become 0 at 6 s. From 5 to 18 s, affected by the faults, the states fluctuate four times, with the maximum peak value being 5.
As shown in
Figure 14, under the algorithm proposed in this paper, the velocity error states of each follower agent on the Y-axis first become 0 compared with the leader’s state at 6 s. From 6 to 9 s, due to the influence of faults, there is one fluctuation, with the maximum peak value being 1.5. However, under the optimal fault-tolerant algorithm, the velocity error states of each agent on the Y-axis first become 0 at 6 s. From 5 to 15 s, affected by the faults, the states fluctuate three times, with the maximum peak value being 4.
As shown in
Figure 15, it can be known from the simulation that under the algorithm in this paper, the velocity error state of the follower UAV on the Z-axis first becomes 0 compared with the leader’s state at 7 s. Affected by the fact that the UUV cannot break away from the water surface, the velocity state of the follower UUV on the Z-axis is relatively consistent with that of the leading UAV at 6 s (it is operating on the horizontal plane at this time), and the follower UAV still has small-scale fluctuations within 7 to 9 s. Under the optimal fault-tolerant algorithm, the velocity error state of the follower UAV on the Z-axis first becomes 0 compared with the leader’s state at 7 s. The velocity error state of the follower UUV on the Z-axis is relatively consistent with that of the leading UAV at 8 s, and the follower UAV is affected by faults and has more frequent fluctuations with larger amplitudes within 7 to 19 s.
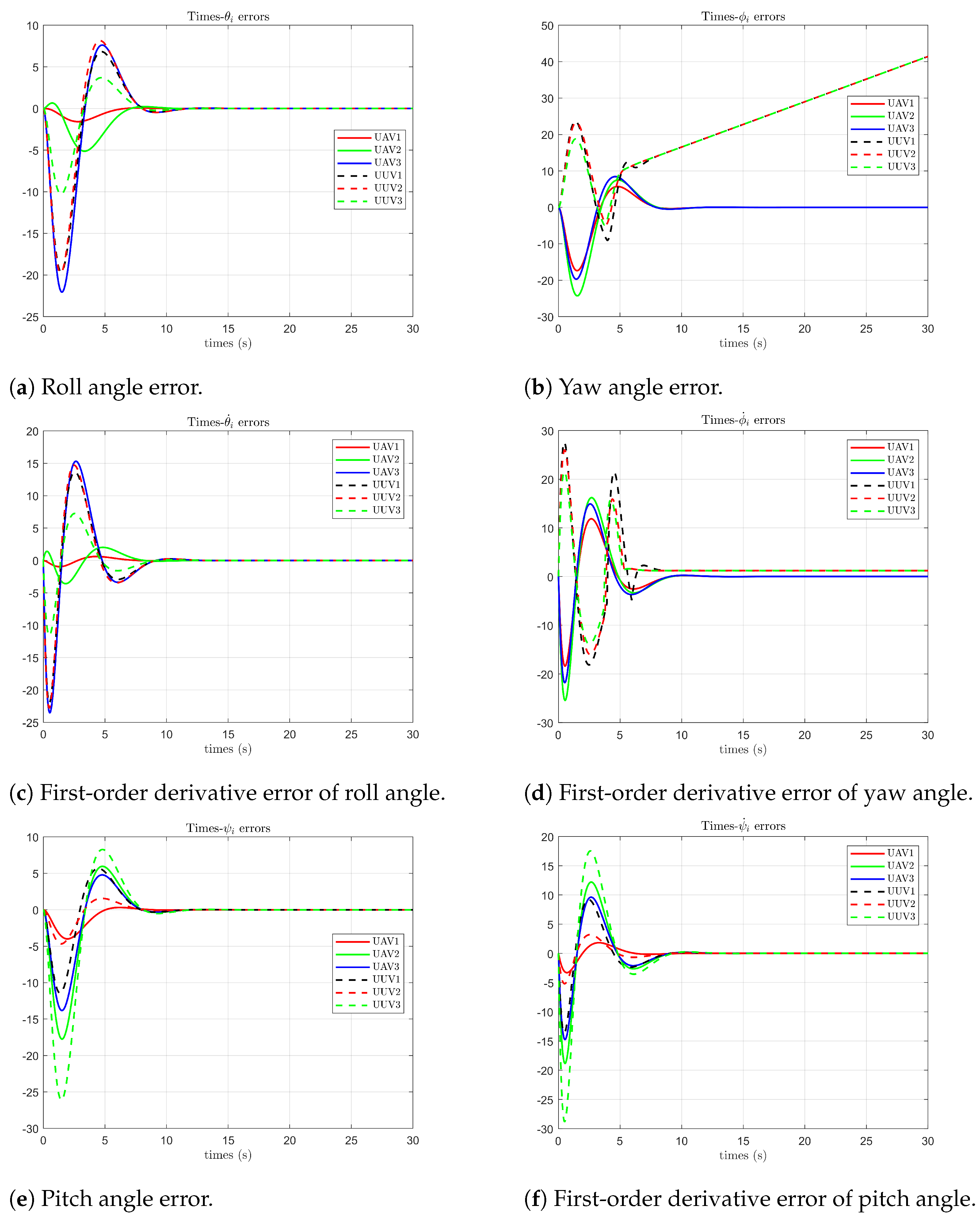
Figure 16 demonstrate that the roll angle errors, pitch angle errors, first-order derivative errors of the roll angle, and first-order derivative errors of the pitch angle of UAVs and UUVs relative to the leader UAV exhibit fluctuations at 10 s due to fault impacts, and gradually stabilize after 15 s. The yaw angle errors and first-order derivative errors of the yaw angle between UUVs, UAVs, and the leader UAV remain oscillatory at 10 s under the combined effects of marine surface constraints and faults, achieving relative stability after 15 s.
Figure 17 illustrates that in a three-dimensional space, UAVs maneuver above the horizontal plane, USVs navigate on the horizontal plane, and UUVs operate submarines. Constrained by the respective dynamic models, only the follower UAVs can achieve full 3D consensus (X, Y, and Z directions) with the leader UAV. The follower USVs and UUVs will maintain their operations on the marine surface and submarine domains beneath the leader UAV.
Faults are incorporated into the distributed consensus control framework of multi-agent systems. The parameters employed in this experimental setup are consistent with those detailed in the preceding sections. The corresponding experimental outcomes are visually presented in the subsequent figure:
As depicted in
Figure 18, when faults occur, the position errors along the X, Y, and Z-axes and the velocity errors along the X, Y, and Z-axes for each intelligent agent exhibit multiple significant fluctuations. The most pronounced amplitude fluctuation resulting from the faults is observed in the velocity component along the X-axis, where a drastic fluctuation with an amplitude of 15 is registered. Eventually, the error states of all the intelligent agents converge and achieve consistency with those of the leader agent.
The second set of experimental scenarios is selected to simulate the algorithm proposed in this paper, and the fault matrix is as follows:
As shown in
Figure 19, and affected by the fault, the position error of each agent in the X-direction experiences a fluctuation with a maximum peak of −1.2 between 6 and 8 s, and then the error with the leader becomes 0.The position error of each agent in the Y-direction experiences a fluctuation with a maximum peak of −0.8 between 6 and 8 s, and then the error with the leader becomes 0. There is almost no fluctuation in the error of each agent in the Z-direction. The velocity error of each agent in the X-direction experiences a fluctuation with a maximum peak of 1.5 between 6 and 8 s, and then the error with the leader becomes 0. The velocity error of each agent in the Y-direction experiences a fluctuation with a maximum peak of 0.9 between 6 and 8 s, and then the error with the leader becomes 0. The velocity error of the UAV in the Z-direction experiences a fluctuation with a maximum peak of 0.4 between 6 and 8 s, and then the error with the leader becomes 0, while the UUV is hardly affected by the fault.










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}