
Simplified Model Characterization and Control of an Unmanned Surface Vehicle

 , , , , and
, , , , and
Abstract
1. Introduction

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Title | Authors | Methods | Results | Contributions | Advantages and Disadvantages |
|---|---|---|---|---|---|
| Adaptive Control Scheme for USV Trajectory-Tracking Under Complex Environmental Disturbances via Deep Reinforcement Learning | Yuan Zhou et al. [13] | Deep Reinforcement Learning (TD3) for trajectory tracking | Improved tracking under dynamic conditions; enhanced learning stability | Robust DRL-based control for USVs, superior to MPC | A: High adaptability to disturbances; D: High computational cost |
| Network-Based Modeling and Sampling Guaranteed Cost Control for Unmanned Surface Vehicle Systems Under Stochastic Cyber-Attacks | Kui Ding and Quanxin Zhu [15] | DStochastic composite system with Lyapunov functions | Stabilizes USVs under cyber-attacks with controlled cost | Introduces a cost-effective control method for cyber-attack scenarios | A: Ensures system stability under uncertain conditions; D: Relies on precise system modeling |
| Multi-Model Predictive Control Strategy for Path-Following of Unmanned Surface Vehicles in Wide-Range Speed Variations | Yingkai Ma et al. [11] | Multi-model predictive control (MPC) with LMI-based robust control and adaptive LOS guidance | Improved path-following accuracy and robustness under speed variations | Enhanced USV maneuverability and control efficiency in dynamic speed conditions | A: Higher efficiency in dynamic speed conditions; D: Computational complexity and need for precise models |
| Investigation of Wind Effects on UAV Adaptive PID Based MPC Control System | A. S. Martinez Leon et al. [18] | Adaptive PID-based MPC control strategy | Improved UAV stabilization and positioning accuracy in the presence of wind disturbances | Enhanced remote surveillance missions along coastlines; insights into wind effects on UAV control | A: Effective for coastal surveillance missions; D: Limited to UAV applications, not directly applicable to USVs |
| Adaptive Formation Control for Obstacle Avoidance in USVs | Hu Yancai, Liu Yang, et al. [17] | RBF neural networks and APF method for formation control | Effective obstacle avoidance while maintaining formation | Provides robust formation control in dynamic environments | A: Handles complex obstacle avoidance; D: May struggle with numerous obstacles or extreme conditions |
| Safe Autonomy for Uncrewed Surface Vehicles Using Adaptive Control and Reachability Analysis | Karan Mahesh et al. [19] | Model Reference Adaptive Control (MRAC) with Moving Horizon Estimator (MHE) for real-time disturbance estimation | 45–81% reduction in position error compared to PID; enhanced real-time safety certification | Improved USV stability in dynamic environments and robust real-time safety verification | A: Improved stability and safety verification in dynamic environments; D: High implementation complexity and computational requirements |
| Evolution of Algorithms and Applications for Unmanned Surface Vehicles in the Context of Small Craft: A Systematic Review | Luis Castano-Londono et al. [20] | Systematic literature review using PRISMA and bibliometric analysis | Identified 387 studies on USV applications and algorithm trends | Provided a comprehensive mapping of USV research, focusing on small craft applications | A: Comprehensive mapping of USV research; D: Does not propose new methods, only a review |
| Hybrid Adaptive Dynamic Programming for Optimal Tracking Control of USVs | Shan Xue, Ning Zhao, et al. [16] | Integration of IRL and DED mechanisms | Reduced communication overhead and improved tracking | Reduces model dependency in tracking control | A: Efficient learning with minimal data transmission; D: Requires significant computational resources |
| A Model Predictive Control Approach for USV Autonomous Cruising via Disturbance Learning | Maotong Cheng et al. [14] | Learning-based MPC, augmented by LSTM residual model | Improved course-keeping under disturbances; LSTM eliminates model mismatch | Improved hydrodynamics modeling for USVs through MPC and LSTM | A: Enhanced hydrodynamic modeling; D: Dependency on historical data for LSTM training |
| Disturbance Estimation and Rejection in an Underwater Autonomous Vehicle | A. Thomas et al. [21] | Integral observer for disturbance estimation; PID for rejection | Accurate disturbance estimation and effective disturbance rejection in underwater environments | Effective disturbance estimation and rejection for underwater vehicles using integral observer | A: Effective disturbance handling; D: Limited to underwater vehicles, not directly applicable to USVs |
| A Comparison of Intelligent Models for Collision Avoidance Path Planning on Environmentally Propelled Unmanned Surface Vehicles | Carlos Barrera et al. [22] | AI-based path planning using ANN, SVM, Random Forest, and Multiple Logistic Regression | ANN achieved the best accuracy and lowest error in trajectory optimization | Demonstrated AI effectiveness in collision avoidance and compliance with COLREGs | A: Demonstrated effectiveness of AI in collision avoidance; D: Requires significant computational resources for training |
| DRL-Based Motion Control for Unmanned Surface Vehicles with Environmental Disturbances | Xiangyu Wu et al. [23] | TD3 algorithm (DRL) combined with PI controller | Improved stability and efficiency under wind and wave disturbances | Superior motion planning for USVs using TD3-PI under environmental conditions | A: Superior motion planning under environmental conditions; D: Requires extensive training and tuning |
| USV Course Control Strategy based on the Disturbance Observer Under Disturbances of Winds and Waves | Xiuren Yue [24] | Nonlinear disturbance observer; composite control strategy (feedforward/feedback) | Strong anti-disturbance ability, accurate course tracking under continuous disturbances | Improved anti-disturbance strategy and course tracking for USVs | A: Improved anti-disturbance strategy; D: Limited to specific disturbance types |
| Heading Control System Design for a Micro-USV Based on an Adaptive Expert S-PID Algorithm | Runlong Miao et al. [25] | Adaptive expert S-PID algorithm tested in pool and lake environments using STM32-ARM and LabWindows/CVI | Achieved 2–3° heading error vs. 5–6° with traditional PID, with improved stability and responsiveness | Robust framework enhancing precision and reliability in micro-USV control | A: Robust framework for micro-USV control; D: Limited scalability to larger USVs |
2. Experimental Platform
- High-performance embedded controller, CompactRIO-9075.
- Global Position System (GPS) module, VK2828U7G5LF.
- Inertial Measurement Unit (IMU), UM7-LT.
- Ultrasonic speed sensor, CS4500.
- Electric water propeller thrust, a TP100 Inrunner brushless motor.
- Steering nozzle, HS-7954.
- Telemetry systems, based on an Xbee-PRO SX module.
3. Unmanned Surface Vehicle Models
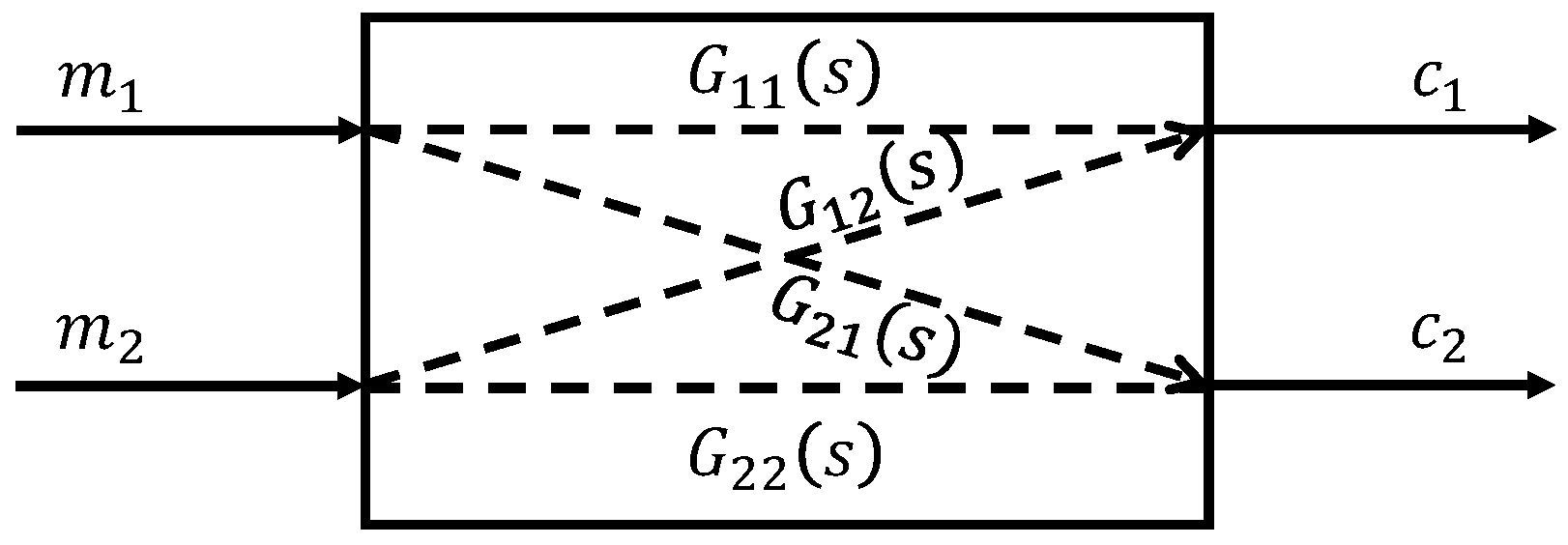
3.1. System Inputs and Outputs
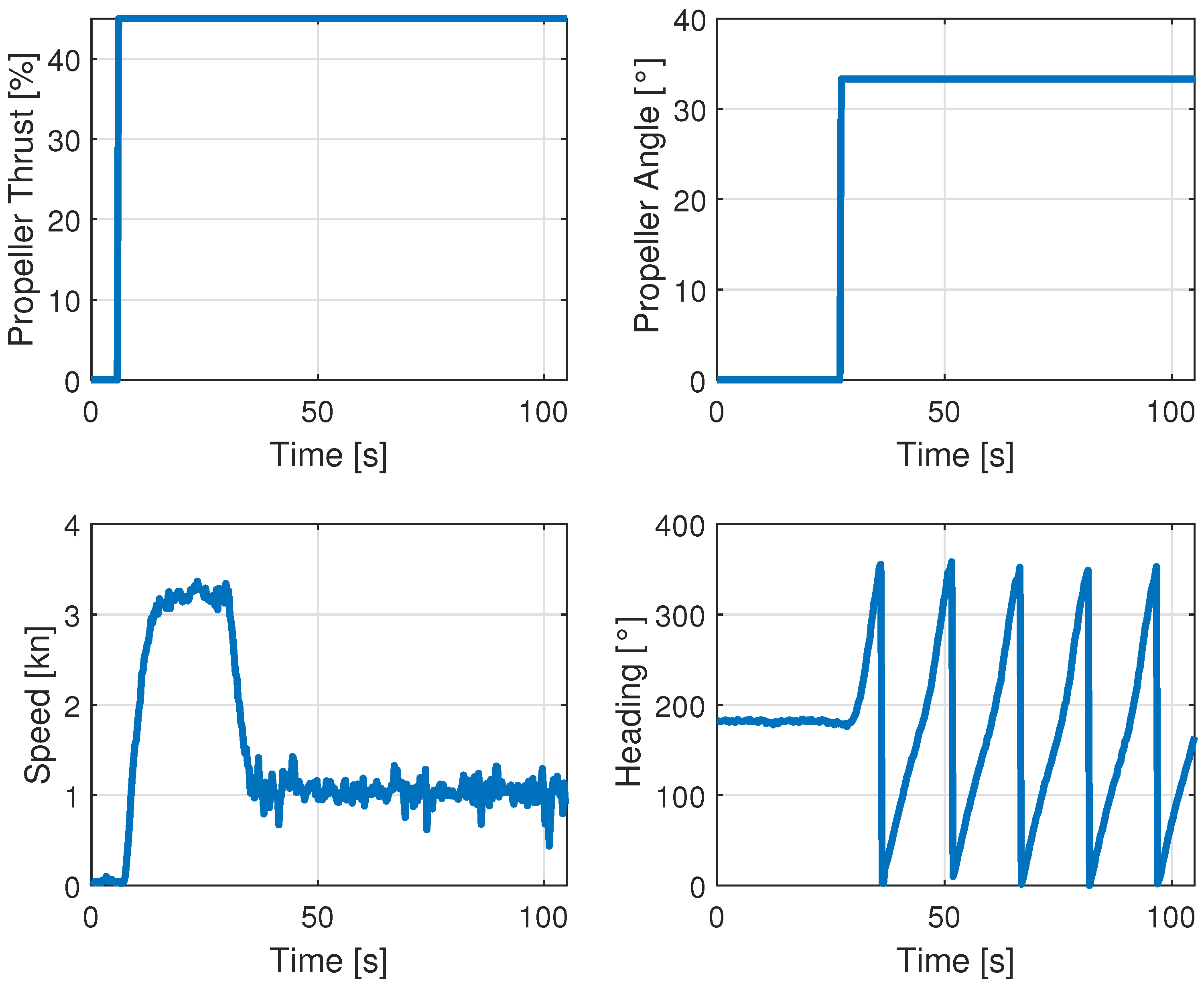
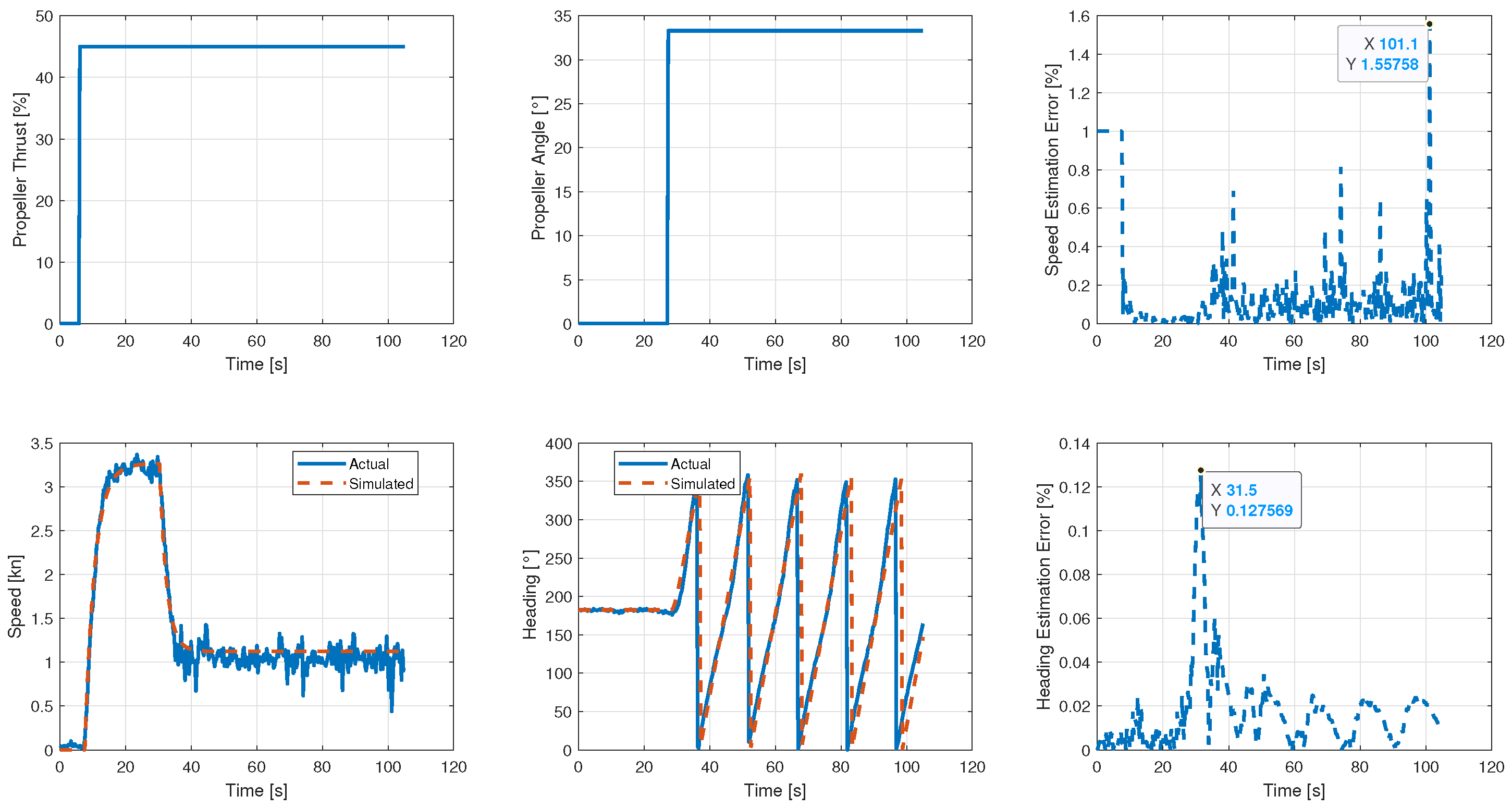
3.2. Experimental Data Generation
3.3. USV Proposed Models
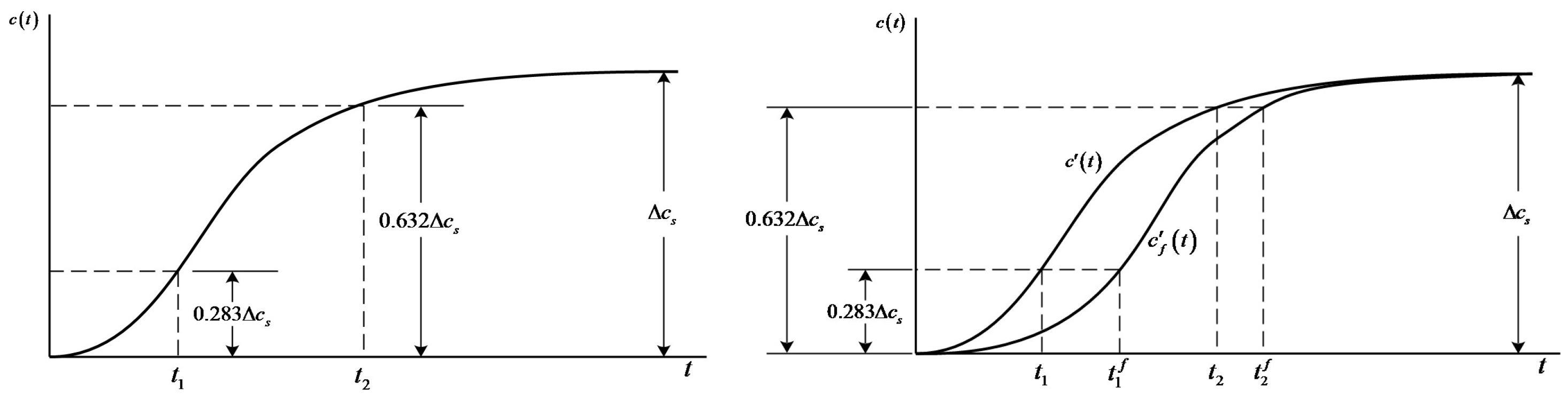
3.3.1. Transfer Function Model
3.3.2. State Space Model
- No iterative optimization: N4SID is non-iterative and therefore fast.
- Numerically robust: Uses Singular Value Decomposition, which is stable and reliable.
- Works well with noise: Especially with short or noisy data records.
- Step 1: Construct block Hankel matrices. For a chosen block size i, construct the block Hankel matrices from the data as follows:Define the future input–output Hankel matrices . The number of columns .
- Step 2: Toeplitz matrix. Compute the oblique projection of future outputs onto the row space of past data , orthogonal to the space covered by , as follows:
- Step 3: Singular Value Decomposition (SVD). Apply SVD to the projection matrix:The system order n is determined by inspecting the singular values in . Retain the dominant n components as follows:Then, estimate the extended observability matrix:
- Step 4: Estimate the state sequence. Estimate the state sequence from the following:where .
- Step 5: Estimate the system matrices. With estimated, solve the following equations via least squares:This yields the state-space matrices and D.
4. Unmanned Surface Vehicle Control
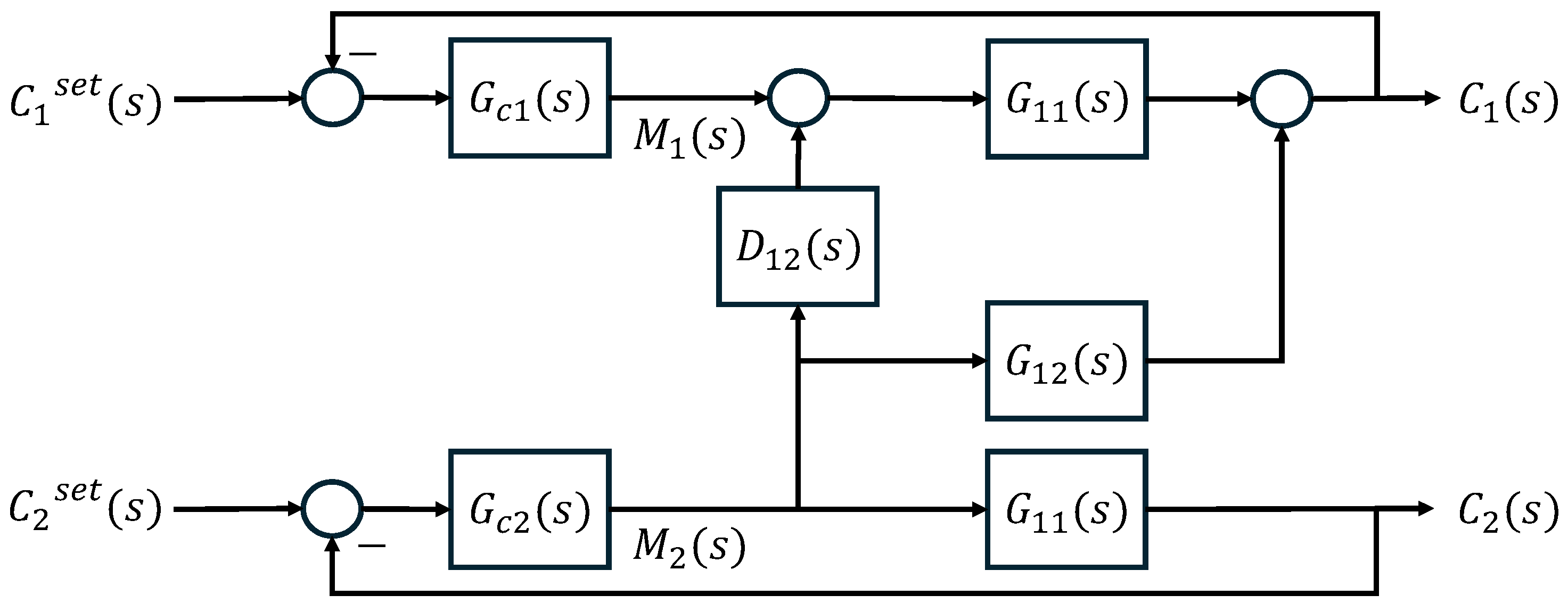
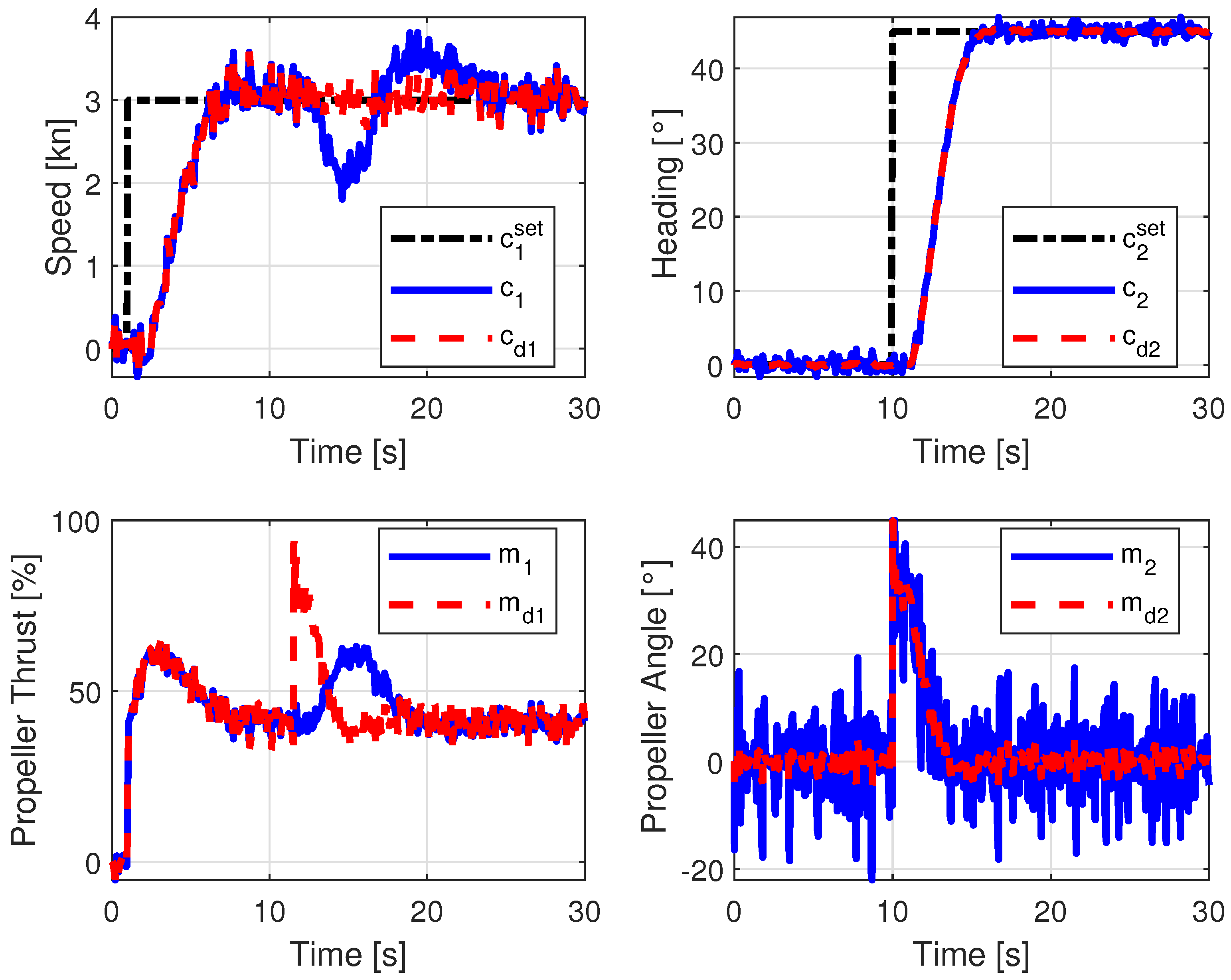
4.1. Control Strategy 1—Independent Control Loops with Decoupling of Interactions
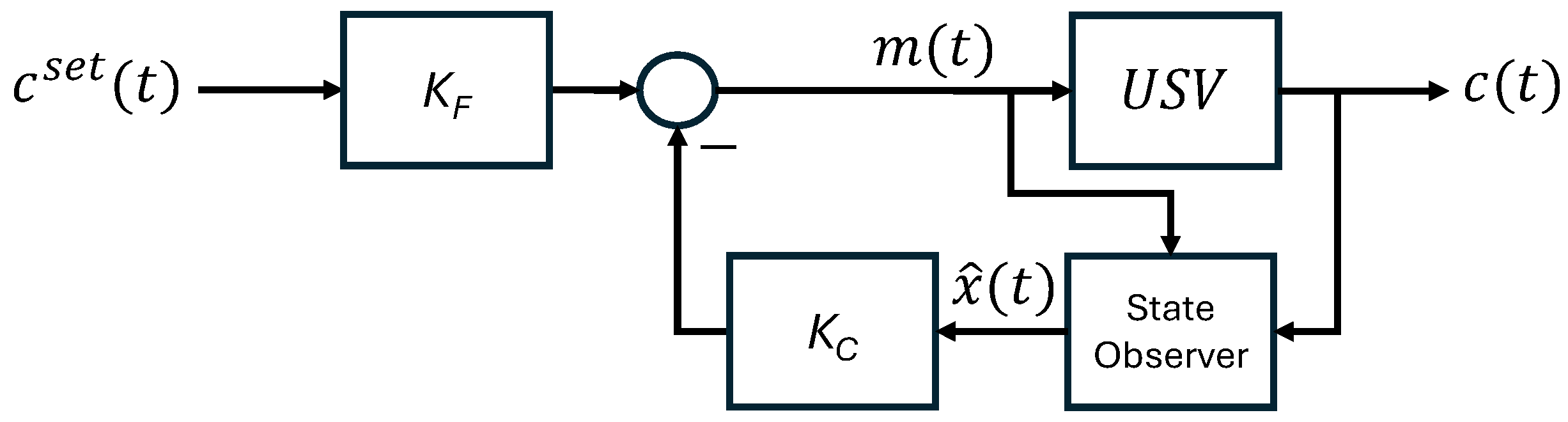
4.2. Control Strategy 2—State Feedback Control
- Step 1. Check controllability: Construct the controllability matrix.If , the system is controllable, and you may proceed. Otherwise, full pole placement is not possible.
- Step 2. Calculate the characteristic polynomial of A.
- Step 3. Choose the desired closed-loop poles: Select n desired eigenvalues based on the desired transient response and stability. Compute the desired characteristic polynomial.
- Step 4. Calculate the feedback gains for the equivalent controllable canonical form.
- Step 5. Calculate the equivalence transformation.
- Step 6. Calculate feedback gains .
5. Discussion
- Interpretability: Simple models are often more transparent and intuitive, making understanding the system’s behavior easier.
- Efficiency: Simpler models typically require fewer computations, making them ideal for real-time applications or iterative simulations.
- Lower hardware demands.
- Reduced data requirements: With fewer parameters, you need less experimental or observational data to calibrate the model.
- Lower risk of overfitting: Simple models are more robust, especially in noisy or limited datasets.
- Control-friendly: Many classic control strategies assume linear or low-order models.
- Observability and controllability: These properties are more straightforward to verify and maintain in simple systems.
- Closed-form solutions: Simpler models often allow for analytical solutions or approximations, revealing key insights into the dynamics.
- Sensitivity analysis: Easier to assess how parameters influence outcomes.
- Model verification: Simpler structures facilitate the identification of errors or inconsistencies in the model assumptions.
- Baseline comparison: Simple models provide a reference for testing the added value of complexity.
- Iterative improvement: Based on performance gaps, you can progressively add complexity as needed.
- Simple structure and intuitive understanding: Easy to implement with minimal code or analog components. Tuning can be performed using basic heuristics or a trial-and-error approach. Little specialist knowledge is needed; it is widely taught and used.
- Required system knowledge and modeling: It can often work with no explicit or straightforward model (e.g., gain and time constant). Design focuses on measured behavior (e.g., step response and frequency response).
- Very low computational load: It can run on inexpensive hardware or analog circuits. It is suitable for high sampling rates and fast dynamics.
- Real-world applicability: It is ideal for single-variable or loosely coupled systems, and these approaches are widely used in typical engineering applications due to their quick deployment and well-understood nature.
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| FOPDT | First Order Plus Dead Time |
| GPS | Global Position System |
| IAE | Integral Absolute Error |
| IFOPDT | Integral First Order Plus Dead Time |
| IMU | Inertial Measurement Unit |
| PI | Proportional-Integral |
| PD | Proportional-Derivative |
| PID | Proportional-Integral-Derivative |
| SMC | Sliding Mode Control |
| USV | Unmanned Surface Vehicles |
| PWM | Pulse Width Modulation |
| NMEA | National Marine Electronics Association |
References
- Qiao, Y.; Yin, J.; Wang, W.; Duarte, F.; Yang, J.; Ratti, C. Survey of deep learning for autonomous surface vehicles in marine environments. IEEE Trans. Intell. Transp. Syst. 2023, 24, 3678–3701. [Google Scholar] [CrossRef]
- Sanjou, M.; Shigeta, A.; Kato, K.; Aizawa, W. Portable unmanned surface vehicle that automatically measures flow velocity and direction in rivers. Flow Meas. Instrum. 2021, 80, 101964. [Google Scholar] [CrossRef]
- Katsouras, G.; Dimitriou, E.; Karavoltsos, S.; Samios, S.; Sakellari, A.; Mentzafou, A.; Tsalas, N.; Scoullos, M. Use of Unmanned Surface Vehicles (USVs) in Water Chemistry Studies. Sensors 2024, 24, 2809. [Google Scholar] [CrossRef]
- Mancini, A.; Frontoni, E.; Zingaretti, P.; Longhi, S. High-resolution mapping of river and estuary areas by using unmanned aerial and surface platforms. In Proceedings of the 2015 International Conference on Unmanned Aircraft Systems (ICUAS), Denver, CO, USA, 9–12 June 2015; IEEE: New York, NY, USA, 2015; pp. 534–542. [Google Scholar]
- Jorge, A.; Vitorino, J.; Fonseca, J. Unmanned Surface Vehicles in the Maritime Environment: A Review. Sensors 2019, 19, 702. [Google Scholar] [CrossRef]
- Abrougui, H.; Nejim, S.; Hachicha, S.; Zaoui, C.; Dallagi, H. Modeling, parameter identification, guidance and control of an unmanned surface vehicle with experimental results. Ocean Eng. 2021, 241, 110038. [Google Scholar] [CrossRef]
- Setiawan, F.A.; Kadir, R.E.A.; Gamayanti, N.; Santoso, A.; Bilfaqih, Y.; Hidayat, Z. Dynamic modelling and controlling Unmanned Surface Vehicle. IOP Conf. Ser. Earth Environ. Sci. 2021, 649, 012056. [Google Scholar] [CrossRef]
- Zhang, Z.; Ren, J. Non-parametric dynamics modeling for unmanned surface vehicle using spectral metric multi-output Gaussian processes learning. Ocean Eng. 2024, 292, 116491. [Google Scholar] [CrossRef]
- Xu, P.F.; Cheng, C.; Cheng, H.X.; Shen, Y.L.; Ding, Y.X. Identification-based 3 DOF model of unmanned surface vehicle using support vector machines enhanced by cuckoo search algorithm. Ocean Eng. 2020, 197, 106898. [Google Scholar] [CrossRef]
- Zhong, Y.; Yu, C.; Cao, J.; Liu, C.; Lian, L. Modeling and Control of Unmanned Surface Vehicles: An Integrated Approach. In Proceedings of the 8th International Conference on Automation, Control and Robotics Engineering (CACRE), Hong Kong, China, 13–15 July 2023; pp. 979–984. [Google Scholar] [CrossRef]
- Ma, Y.; Liu, Z.; Wang, T.; Song, S.; Xiang, J.; Zhang, X. Multi-model predictive control strategy for path-following of unmanned surface vehicles in wide-range speed variations. Ocean Eng. 2024, 295, 116845. [Google Scholar] [CrossRef]
- Wang, X.; Yi, H.; Xu, J.; Xu, C.; Song, L. PID Controller Based on Improved DDPG for Trajectory Tracking Control of USV. J. Mar. Sci. Eng. 2024, 12, 1771. [Google Scholar] [CrossRef]
- Zhou, Y.; Gong, C.; Chen, K. Adaptive Control Scheme for USV Trajectory-Tracking under Complex Environmental Disturbances via Deep Reinforcement Learning. IEEE Internet Things J. 2025, early access. [Google Scholar] [CrossRef]
- Cheng, M.; Yao, J.; Ren, Q. A Model Predictive Control Approach for USV Autonomous Cruising via Disturbance Learning. In Proceedings of the 2024 IEEE 18th International Conference on Control & Automation (ICCA), Reykjavík, Iceland, 18–21 June 2024; IEEE: New York, NY, USA, 2024; pp. 988–993. [Google Scholar]
- Ding, K.; Zhu, Q. Network-Based Modeling and Sampling Guaranteed Cost Control for Unmanned Surface Vehicle Systems Under Stochastic Cyber-Attacks. IEEE Trans. Intell. Transp. Syst. 2024, 25, 6173–6185. [Google Scholar] [CrossRef]
- Xue, S.; Zhao, N.; Zhang, W.; Luo, B.; Liu, D. A Hybrid Adaptive Dynamic Programming for Optimal Tracking Control of USVs. IEEE/ASME Trans. Mechatronics 2024, early access. [Google Scholar] [CrossRef]
- Yancai, H.; Yang, L.; Yan, Z.; Hoang, D.T.M. Adaptive Formation Control for Obstacle Avoidance of USVs with Asymmetric Input Saturation. Sci. Rep. 2024, 14, 73560. [Google Scholar] [CrossRef]
- Martínez-León, A.S.; Jatsun, S.; Emelyanova, O. Investigation of Wind Effects on UAV Adaptive PID Based MPC Control System. Enfoque UTE 2024, 15, 36–47. [Google Scholar] [CrossRef]
- Mahesh, K.; Sharma, A.; Peters, A.; Mehra, R.; Pascoal, A.; Williams, B. Safe Autonomy for Uncrewed Surface Vehicles Using Adaptive Control and Reachability Analysis. arXiv 2024, arXiv:2410.01038. [Google Scholar] [CrossRef]
- Castano-Londono, L.; Marrugo Llorente, S.d.P.; Paipa-Sanabria, E.; Orozco-Lopez, M.B.; Fuentes Montaña, D.I.; Gonzalez Montoya, D. Evolution of Algorithms and Applications for Unmanned Surface Vehicles in the Context of Small Craft: A Systematic Review. Appl. Sci. 2024, 14, 9693. [Google Scholar] [CrossRef]
- Thomas, A.R.; PS, L.P.; Kumar, H. Disturbance Estimation and Rejection in an Underwater Autonomous Vehicle. In Proceedings of the 2024 International Conference on E-mobility, Power Control and Smart Systems (ICEMPS), Thiruvananthapuram, India, 18–20 April 2024; IEEE: New York, NY, USA, 2024; pp. 1–6. [Google Scholar]
- Barrera, C.; Maarouf, M.; Campuzano, F.; Llinas, O.; Marichal, G.N. A Comparison of Intelligent Models for Collision Avoidance Path Planning on Environmentally Propelled Unmanned Surface Vehicles. J. Mar. Sci. Eng. 2023, 11, 692. [Google Scholar] [CrossRef]
- Wu, X.; Wei, C. DRL-Based Motion Control for Unmanned Surface Vehicles with Environmental Disturbances. In Proceedings of the 2023 IEEE International Conference on Unmanned Systems (ICUS), Hefei, China, 13–15 October 2023; IEEE: New York, NY, USA, 2023; pp. 1696–1700. [Google Scholar]
- Yue, X. UsV Course Control strategy based on the Disturbance Observer Under Disturbances of winds and waves. In Proceedings of the 2023 Smart City Challenges & Outcomes for Urban Transformation (SCOUT), Singapore, 29–30 July 2023; IEEE: New York, NY, USA, 2023; pp. 76–80. [Google Scholar]
- Miao, R.; Dong, Z.; Wan, L.; Zeng, J. Heading control system design for a micro-USV based on an adaptive expert S-PID algorithm. Pol. Marit. Res. 2018, 25, 6–13. [Google Scholar] [CrossRef]
- Smith, C.A.; Corripio, A.B. Principles and Practices of Automatic Process Control; John Wiley & Sons: Hoboken, NJ, USA, 2005. [Google Scholar]
- Jorge, C.C.; Jorge, H.N.; Wendell, M.R.; Edalatpanah, S.; Shariq, A.B.; Naz, S.; Javier, J.C.; Gabriel, P.E. Novel characterization and tuning methods for integrating processes. Int. J. Inf. Technol. 2024, 16, 1387–1395. [Google Scholar] [CrossRef]
- Van Overschee, P.; De Moor, B. Subspace Identification for Linear Systems: Theory—Implementation—Applications; Springer Science & Business Media: Cham, Switzerland, 2012. [Google Scholar]
- Zeno, A.; Omtveit, M.; Uhlen, K. Improvement of System Identification using N4SID and DBSCAN Clustering for Monitoring of Electromechanical Oscillations. In Proceedings of the 2023 IEEE Belgrade PowerTech, Belgrade, Serbia, 25–29 June 2023; IEEE: New York, NY, USA, 2023; pp. 1–6. [Google Scholar]
- Ma, H.; Yang, D.; Qin, H.; Cao, Y.; Cheng, D.; Zhang, B.; Hao, X.; Zhou, N. Power System Equivalent Inertia Estimation Method Using System Identification. In Proceedings of the 2022 IEEE 5th International Conference on Electronics Technology (ICET), Chengdu, China, 13–16 May 2022; IEEE: New York, NY, USA, 2022; pp. 360–365. [Google Scholar]
- Coughran, M.T. Lambda Tuning—the Universal Method for PID Controllers in Process Control. Control. Glob. Digit. Ed. 2013. Available online: https://www.controlglobal.com/articles/2013/lambda-tuning-universal-method-for-pid-controllers/ (accessed on 1 March 2025).
- Huang, B.; Lu, B.; Li, Q. A proportional–integral-based robust state-feedback control method for linear parameter-varying systems and its application to aircraft. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2019, 233, 4663–4675. [Google Scholar] [CrossRef]
- Zhang, M.; Li, D.; Xiong, J.; He, Y. GBM-ILM: Grey-Box Modeling Based on Incremental Learning and Mechanism for Unmanned Surface Vehicles. J. Mar. Sci. Eng. 2024, 12, 627. [Google Scholar] [CrossRef]
- Xu, F.; Zhang, K.; Song, S.; Xie, Y. Simulation Technology of Unmanned Surface Vehicle Cluster Based on Digital Modeling. In Proceedings of the International Conference on Autonomous Unmanned Systems, Nanjing, China, 9–11 September 2023; Springer: Singapore, 2023; pp. 37–48. [Google Scholar]
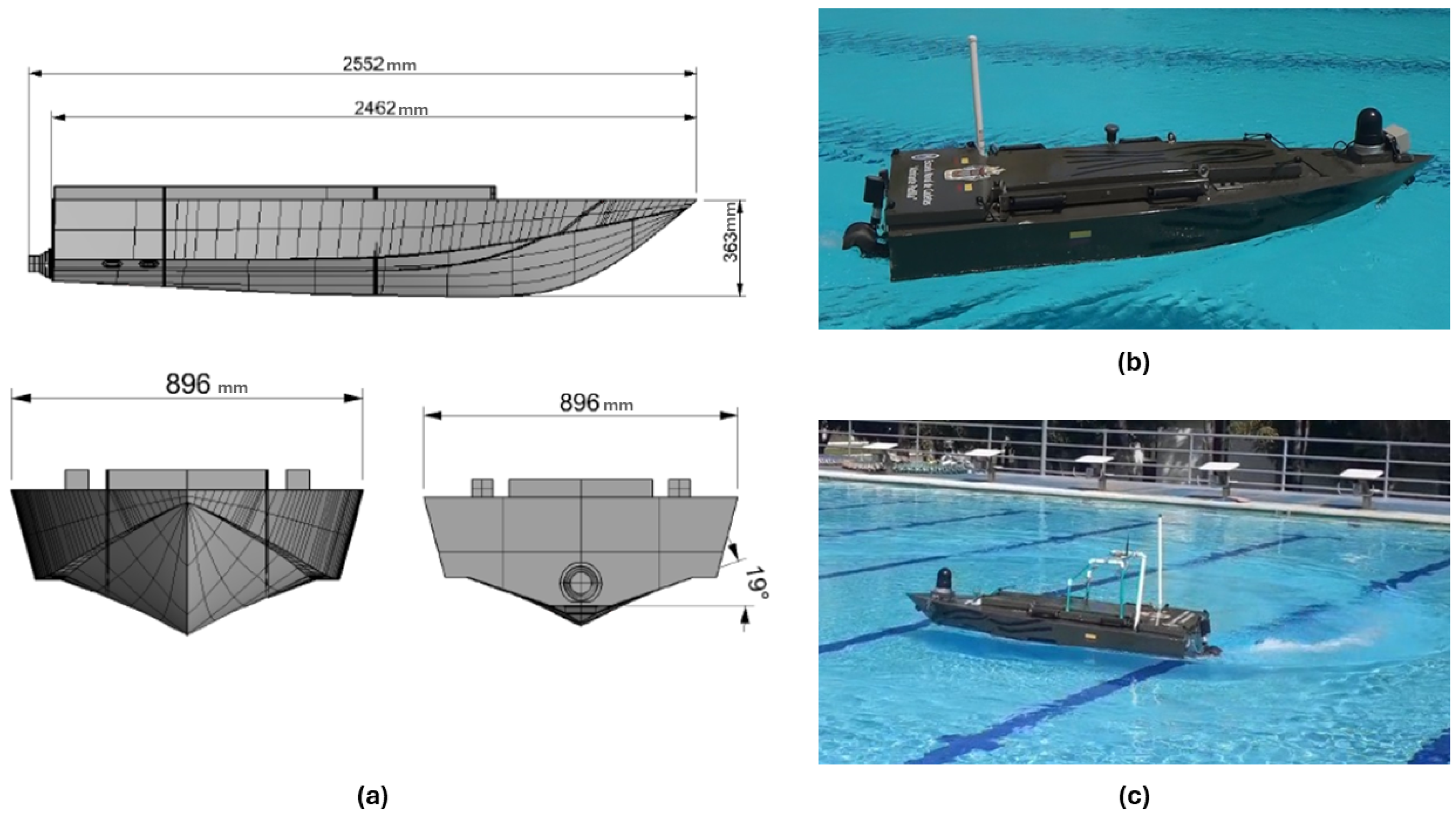


| Parameter | Value |
|---|---|
| Length | 2462 mm |
| Beam | 896 mm |
| Draft | 15 mm |
| Weight | 117 kg |
| Speed | 9 kn |
| Type | Variable | Symbol | Range |
|---|---|---|---|
| Input | Propeller Thrust | 0∼100 % | |
| Propeller Angle | −45°∼45° | ||
| Output | USV Speed | 0∼9 kn | |
| USV Heading | 0°∼360° |
| Controller | Parameter | Value |
|---|---|---|
| PI | 13.7861 | |
| 3 | ||
| PD | 0.7143 | |
| 1 |
| Control Strategy | IAE Index |
|---|---|
| 1 | = 12.39 |
| = 136.9 | |
| 2 | = 7.943 |
| = 37.91 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lovo-Ayala, A.; Soto-Diaz, R.; Gutierrez-Martinez, C.A.; Jimenez-Vargas, J.F.; Jiménez-Cabas, J.; Escorcía-Gutierrez, J. Simplified Model Characterization and Control of an Unmanned Surface Vehicle. J. Mar. Sci. Eng. 2025, 13, 813. https://doi.org/10.3390/jmse13040813
Lovo-Ayala A, Soto-Diaz R, Gutierrez-Martinez CA, Jimenez-Vargas JF, Jiménez-Cabas J, Escorcía-Gutierrez J. Simplified Model Characterization and Control of an Unmanned Surface Vehicle. Journal of Marine Science and Engineering. 2025; 13(4):813. https://doi.org/10.3390/jmse13040813
Chicago/Turabian StyleLovo-Ayala, Aldo, Roosvel Soto-Diaz, Carlos Andres Gutierrez-Martinez, Jose Fernando Jimenez-Vargas, Javier Jiménez-Cabas, and Jose Escorcía-Gutierrez. 2025. "Simplified Model Characterization and Control of an Unmanned Surface Vehicle" Journal of Marine Science and Engineering 13, no. 4: 813. https://doi.org/10.3390/jmse13040813
APA StyleLovo-Ayala, A., Soto-Diaz, R., Gutierrez-Martinez, C. A., Jimenez-Vargas, J. F., Jiménez-Cabas, J., & Escorcía-Gutierrez, J. (2025). Simplified Model Characterization and Control of an Unmanned Surface Vehicle. Journal of Marine Science and Engineering, 13(4), 813. https://doi.org/10.3390/jmse13040813