1. Introduction
Mussels represent an affordable and environmentally sustainable source of protein, with minimal greenhouse gas emissions [
1]. It is estimated that approximately 94% of global mussel production is currently derived from aquaculture, with raft culture representing one of the most efficient techniques, enabling consistent year-round production [
2]. However, the expansion of raft culture is constrained by spatial limitations [
3]. Concurrently, the accelerated growth of renewable energy sources has established offshore wind farms as a crucial element in the global drive toward a clean energy future. However, as offshore wind installations expand, they increasingly occupy limited coastal waters, which may result in potential conflicts with existing aquaculture activities. To address these spatial challenges, integrating wind energy infrastructure with raft aquaculture facilities represents a promising solution [
4]. By deploying aquaculture structures within the confines of a wind farm, the utilization of ocean space can be optimized. Meanwhile, turbine foundations can serve as dual-purpose anchoring points for aquaculture, potentially functioning as artificial reefs that support marine biodiversity [
5]. This integrated approach represents a compelling opportunity for economic synergy. Despite the existence of numerous conceptual designs for integrated systems of this nature, only a small number have progressed to the stage of commercial operation. The majority of countries remain at the pilot development stage [
6,
7,
8].
The combination of offshore wind farms with aquaculture systems has the potential to offer several benefits, including the optimization of marine space usage and advancement of sustainable development. Specifically, integrating mussel raft culture with wind farms could facilitate efficient, year-round production by leveraging shared infrastructure. However, a notable gap exists in the literature regarding the effective layouts and structural interactions between mussel raft systems and offshore wind turbines. Despite the proposal by Buck et al. (2004) that combines bivalve raft culture with offshore wind turbines [
7], detailed research on the structural interactions between wind turbine foundations and aquaculture facilities remains scarce. The potential for wind turbine monopiles to be effectively utilized as anchor points for mussel raft structures has yet to be investigated, and the optimal structural arrangements for aquaculture within offshore wind farms have not been thoroughly explored.
The majority of studies have concentrated on the integration of offshore wind farms with aquaculture cages rather than raft systems. Since cage aquaculture requires extensive marine areas, it is typically combined with floating wind turbines. Floating platforms for floating wind turbines can be categorized into the following three types [
9]: (1) spar buoy platform, (2) tension leg platform, and (3) semi-submersible platform. A semi-submersible platform is the most suitable type of floating platforms to be integrated with aquaculture structures due to its high stability and ample space. For example, Zheng et al. (2018) evaluated the dynamic response of an innovative floating offshore wind turbine integrated with a steel fish-farming cage (FOWT-SFFC) under diverse environmental conditions, confirming its exceptionally dynamic performance [
10]. Similarly, Zhao et al. (2023) employed OpenFOAM software to simulate the structural load interactions between the combined wind turbine and fish cage systems, with a particular focus on the effects of the wave height and water depth on the load amplitude [
11]. Further investigation of the dynamic behavior of wind–cage structures was conducted by Zhang et al. (2022) and Cao et al. (2022), who observed the damping effects of cage nets on platform dynamics [
12,
13]. Yi et al. (2024) demonstrated that the aquaculture cage serves to reduce the oscillation amplitude and acts as a damper in an integrated offshore wind–wave–aquaculture (WWA) system [
14]. Overall, the hydrodynamic interactions and coupling effects between wind turbines and aquaculture cage systems under wind and wave conditions have been adequately studied [
15,
16,
17]. These findings underscore the focus on fish cage systems and highlight the lack of equivalent research on raft culture within offshore wind farms.
In the past, studies tended to focus on the hydrodynamic characteristics of wind turbines and raft aquaculture structures as separate entities. In recent years, an increasing number of studies underscore the value of numerical simulations based on computational fluid dynamics (CFD) for evaluating the performance of floating wind turbines and aquaculture structures. CFD-based numerical models have been widely applied in the study of wave–structure interactions. For example, by solving the Navier–Stokes equations (i.e., viscous flow solver), it is possible to effectively investigate the gap resonance problems between two boxes [
18,
19,
20], a stationary box and a vertical wall [
21], and two side-by-side barges [
22]. By solving the Reynolds-averaged Navier–Stokes (RANS) equations coupled with advanced turbulence models, CFD can account for highly nonlinear effects, such as wave breaking, vortex shedding, and transient loads, which become particularly significant under extreme environmental conditions (e.g., large wave heights and strong currents). For example, Zhong et al. (2023) analyzed the dynamics of a semi-submersible platform designed for a 15 MW wind turbine in the context of freak wave conditions, with a particular focus on the platform’s motion responses and mooring line tension [
23]. Tang et al. (2021) employed CFD to examine the nonlinear wave load impacts on a 10 MW scale monopile offshore wind turbine by investigating the variations in wave pressure and horizontal forces under diverse sea conditions [
24]. Investigations into raft aquaculture structures have concentrated on the hydrodynamic behavior of isolated structures. In a recent study, Wang et al. (2023) employed numerical simulations to investigate the hydrodynamic characteristics of an attenuator-type wave energy converter with varying raft shapes, with a particular focus on parameters such as the wave period and structural design [
25]. Wang et al. (2022) proposed that the scale and spatial layout of the floating raft aquaculture structures should be considered when assessing the impact of aquaculture activities on the hydrodynamic environment [
26]. The aforementioned studies provide valuable insights into the hydrodynamic characteristics of monopile foundations or raft facilities, addressing various factors such as the wave loads, structural integration, and dynamic responses under different environmental conditions. The wind monopiles in offshore wind farms significantly affect the forces on raft aquaculture structures by altering the flow field, wave field, and their coupling with environmental factors. This impact is multifaceted, including the drag force, wave force, dynamic loads, resonance effects, and foundation stability. To accurately assess the force conditions of raft aquaculture facilities, it is necessary to conduct an in-depth study on the coupling effects between monopiles, waves, and currents. However, current research on the hydrodynamic characteristics of raft aquaculture facilities within offshore wind farms is notably insufficient, particularly in revealing the interaction mechanisms of the current–wave structure in complex wind farm environments. This highlights the necessity for further systematic research in this field.
Mooring line tension directly affects the stability of offshore structures in the marine environment. The potential consequences of high mooring line tension are multifaceted. Increased tension may lead to a higher risk of mooring line failure and shorten the service life of the mooring system. Additionally, the structural integrity of the mooring system itself may be compromised, impacting the overall stability and safety of the structure. Tomasicchio et al. (2018) conducted experimental research on a spar-type floating offshore wind turbine under different wave–wind conditions, and the results indicate that waves have a more significant impact on structural dynamics compared with wind [
27]. Lauria et al. (2024) proposed that the peak frequency of mooring line tension is primarily influenced by the wave frequency [
28]. Therefore, fully understanding and accurately assessing the impact of wave action on the mooring line tension of aquaculture facilities within offshore wind farms is crucial for ensuring their long-term structural reliability and safety.
At present, the applied research on the combination of a wind monopile and aquaculture structures is still in the preliminary stage, although some studies have been conducted on the integration of floating wind turbines with fish cages. There is a lack of practical technical guidance on how to arrange raft facilities around the wind monopile. Therefore, this study investigated the hydrodynamic forces of pontoon raft aquaculture facilities (PRAFs) that used the wind farm monopile foundation as an anchor. Our previous paper (Ai et al., 2024) considered the mooring line tension [
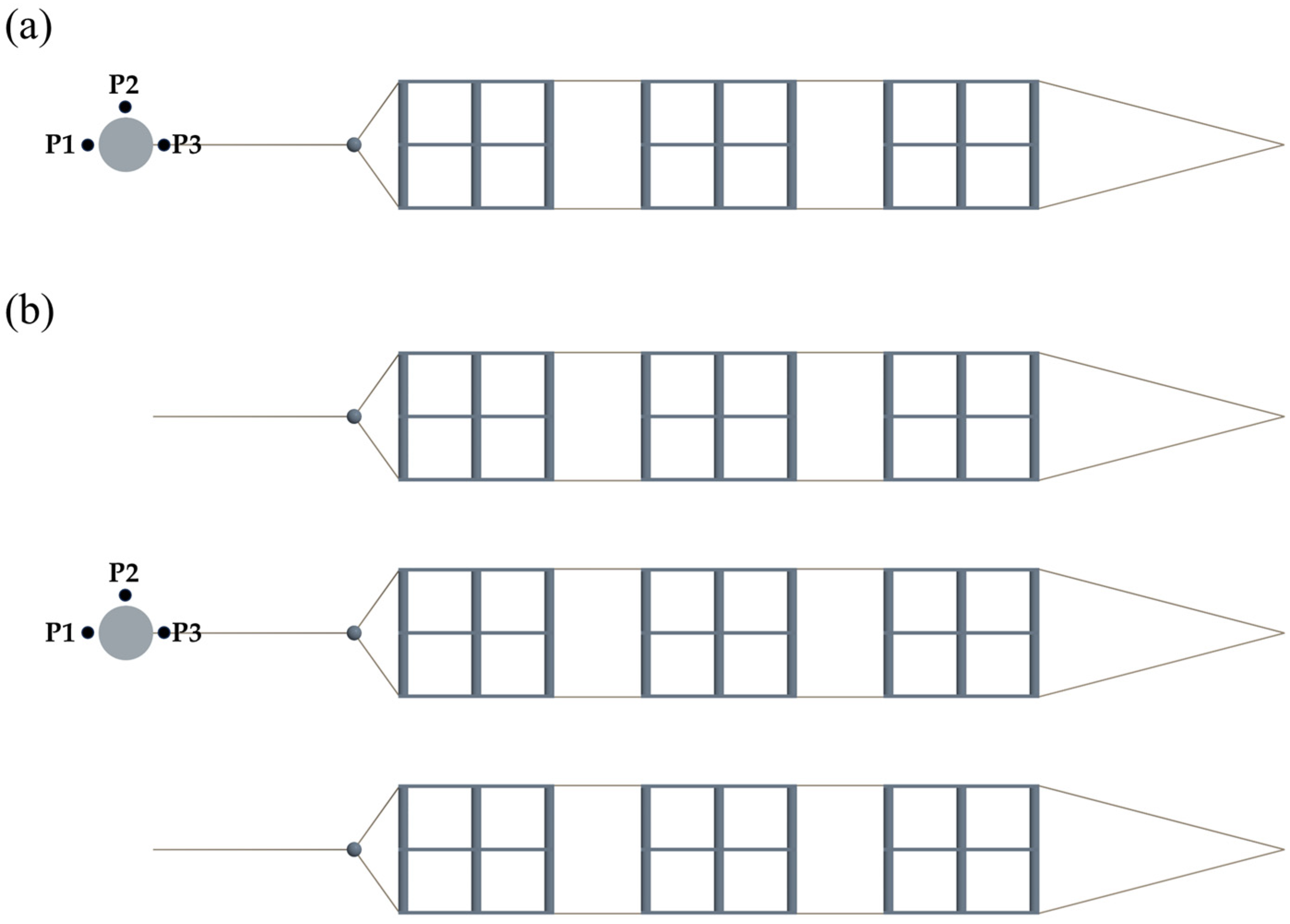
29]. In this study, we extend our previous work by incorporating both the mooring line tension and bridle line tension to achieve a more comprehensive understanding of the hydrodynamic loads acting on the PRAFs. This dual focus represents a novel perspective, as prior research has rarely examined the internal connection forces (bridle lines) alongside mooring forces. Moreover, the hydrodynamic performance of the single-row PRAF arrangement and multi-row PRAF arrangement were compared. The effects of the wind monopile on wave propagation were assessed through numerical simulations. By integrating water tank experiments and numerical simulations, this work clarified wave–structure interaction mechanisms in the presence of a monopile—an area that has not been extensively addressed in the literature. Ultimately, this study advanced the understanding of co-locating wind and aquaculture structures, laying the groundwork for safer and more efficient offshore operations. The findings can provide valuable insights into the design and optimization of integrated wind–aquaculture areas.
4. Results and Discussion
In this study, multiple wave parameters (e.g., wave height, wave period, and raft layouts) were considered to evaluate their respective impacts on the hydrodynamic forces (mooring line tension and bridle line tension) on the PRAFs. Moreover, to better visualize the actual hydrodynamic performance of the aquaculture facilities at sea, the model test results were converted to full-scale results according to the model criterion. The following subsections present the results of this study and summarize our expanded discussion regarding the physical mechanisms at play.
4.1. Mooring Line Tensions of PRAF
The structural integrity of aquaculture facilities relies heavily on the mooring system. Mooring line failure is an important factor in exposing the structure to risks. This study analyzed the effect of different arrangements on the mooring system of the PRAF, which can provide an important reference for the design and construction of raft aquaculture facilities, as well as the decision-making of wind turbine foundations as anchorage points.
4.1.1. The Maximum Mooring Line Tensions of the Single-Row PRAF Under Wave Conditions
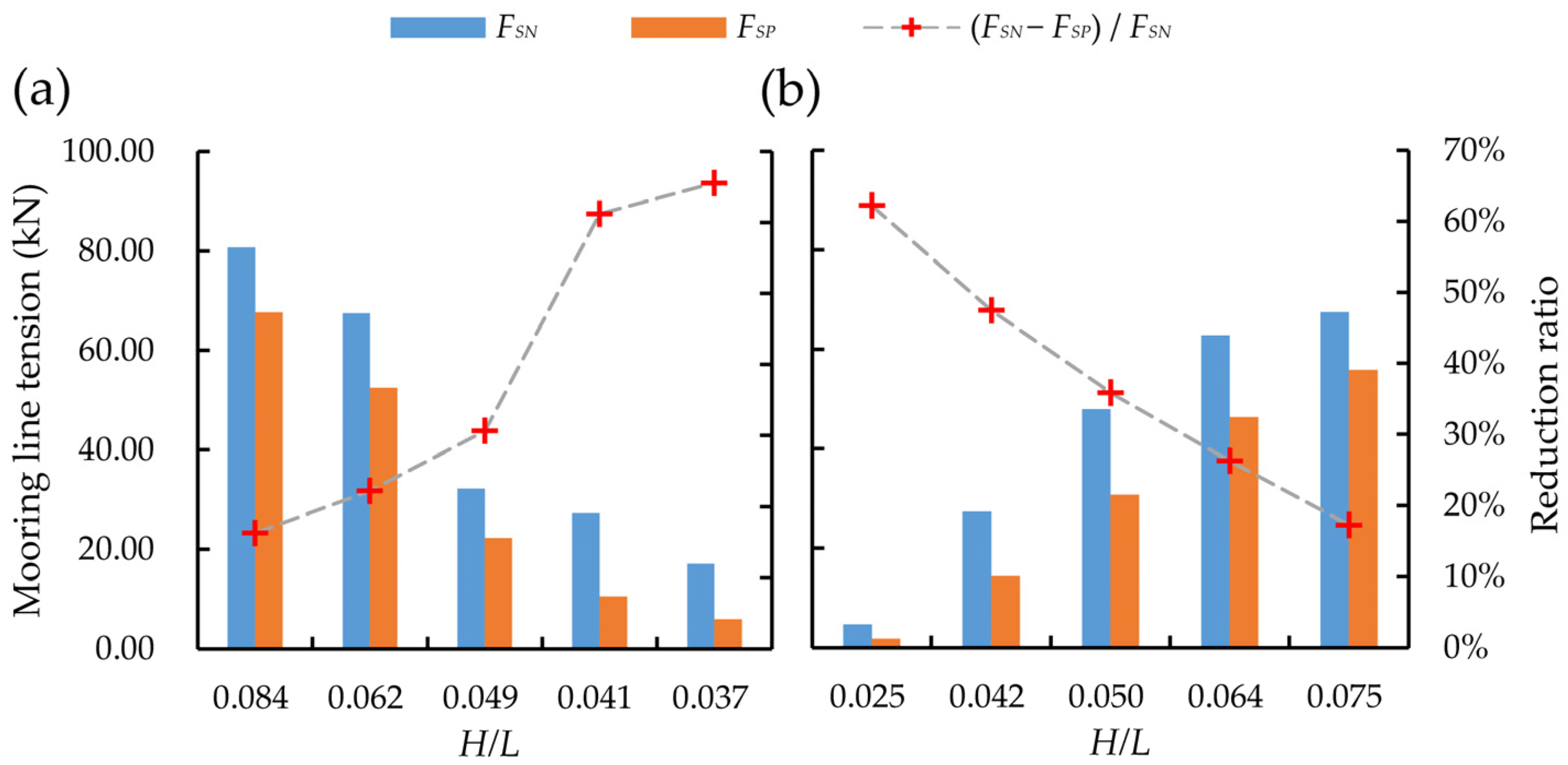
Figure 11 shows the maximum tensions of the upstream mooring line for a single-row PRAF under different wave periods and heights. Here,
and
represent the maximum mooring line tension without and with a monopile, respectively. The results indicate that regardless of the presence of the wind turbine monopile in the wave tank, the maximum mooring line tension decreased in the wave periods from 1.0 s to 1.4 s when the wave height was 0.1125 m (
Figure 11a). Under longer wave periods, the incident wave energy was distributed over a slower timescale, meaning that each crest exerted a force over a longer duration but generally had a lower peak value. As a result, both the mooring cables and the raft had more time to adjust to the motion of the waves, which could reduce the maximum tension in the cables. Meanwhile, shorter wave periods increased the frequency of the crest impacts within the same timeframe, which led to higher acceleration and velocity variations for the structure. This could result in amplified instantaneous forces, which caused increases in the mooring line tensions and more pronounced high-frequency oscillation. When the wave period was 1.0 s and the wave height was 0.1125 m (Case 1), the wave steepness was at its maximum (
= 0.084), which corresponded to the highest recorded mooring line tension
of 80.73 kN.
The wave height determines the overall magnitude of the wave energy, while the wave steepness reflects its nonlinearity. Higher waves carry more energy; consequently, the inertia and viscous drag forces on the PRAF system and mooring lines are elevated. When the wave period was 1.237 s, the maximum mooring line tension increased as the wave height rose from 0.063 m to 0.188 m (
Figure 11b). This trend is consistent with previous research findings [
30,
39]. Our results indicate that as the wave height increased, the maximum tension in the mooring lines also grew. This enhanced motion contributed further to the increased dynamic loads on the mooring lines. These observations follow a well-established pattern in marine engineering: as the wave steepness increases, the structural stability decreases and the wave-induced force on the structure grows, thereby leading to higher tension levels in the mooring system [
40,
41].
By comparing and analyzing the effects of the wind monopile on the PRAF,
represents the reduction ratio of the maximum mooring line tension in the presence of the wind monopile relative to the condition without it. The results show that when the monopile was present, the maximum mooring line tension was decreased by 16% to 66%, and the reduction ratio increased as the wave steepness decreased. This effect was the most pronounced when the wave steepness was 0.037. As a type of marine structure, a wind turbine monopile disrupts wave propagation, with wave diffraction and reflection being the main mechanisms of wave energy loss when waves encounter an obstacle. The likelihood and intensity of diffraction effects are closely related to the length scale ratio between the monopile diameter (
) and the wavelength (
): at small
ratios, the flow separation is important while diffraction is minimal, whereas at large
ratios, diffraction becomes dominant and the flow separation is less significant. de Leon et al. (2011) [
42] noted that the monopile creates a shadow zone downstream with a lower significant wave height (
. Meanwhile, the interaction between waves and the monopile leads to a weakened and more confined oscillating flow in the vicinity of the monopile [
43]. These wave–structure interaction effects contribute to a reduction in mooring line tension compared with conditions without a monopile.
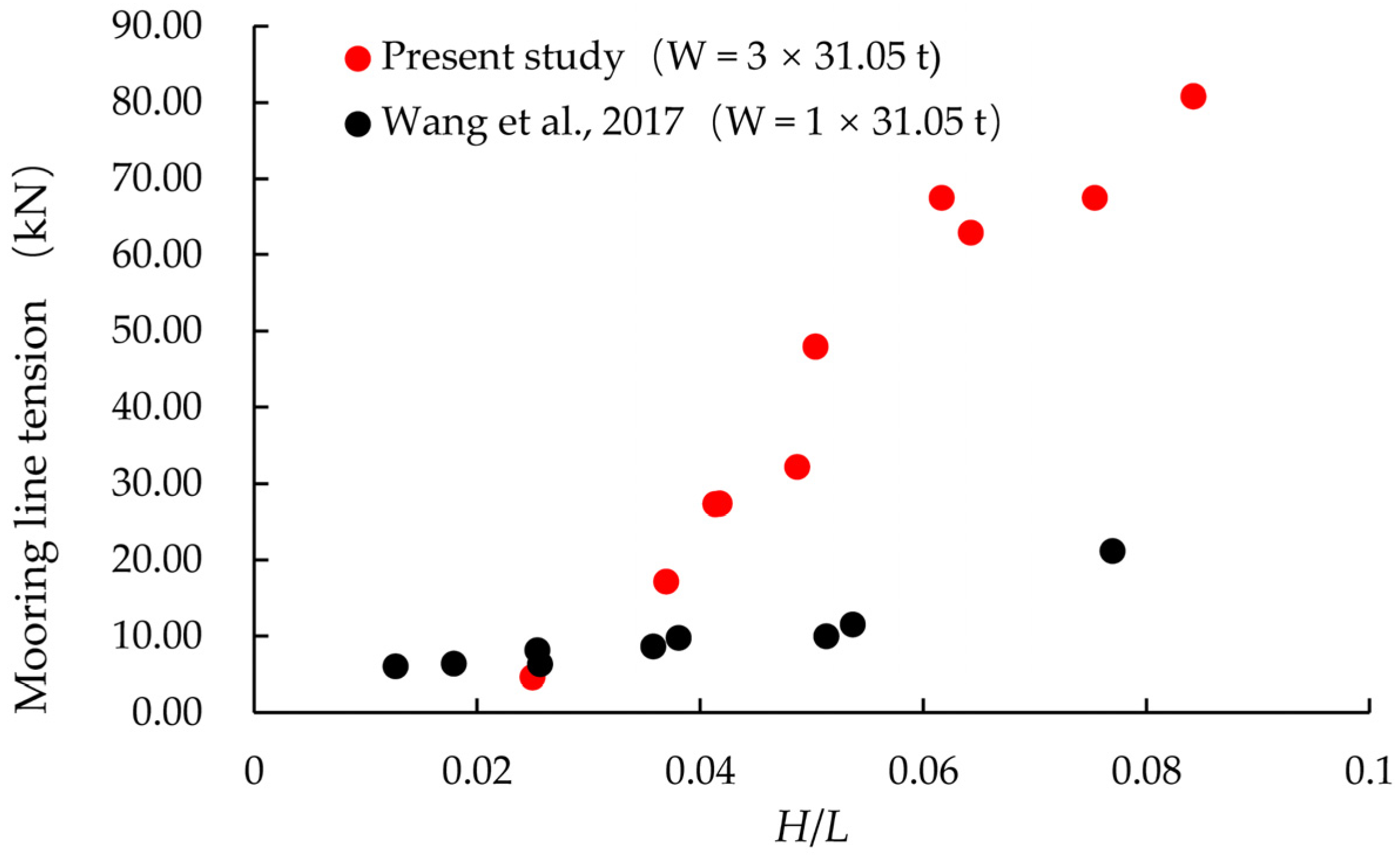
Figure 12 compares the
at full scale for a single-row PRAF with three rafts (each raft supported 31.05 t of mussel weight) with a raft facility described in [
39]. As the wave steepness increased from 0.025 to 0.084, the maximum mooring line tension rose from 4.60 kN to 80.73 kN. This trend aligns with the numerical simulation results of a raft facility reported by Wang et al. (2017), where the maximum mooring line tension increased from 5.96 kN to 21.13 kN at wave steepnesses that ranged from 0.013 to 0.077 [
39]. The consistency suggests that the relationship between the wave steepness and the mooring line tension is robust for different configurations, supporting both the validity of the present experimental setup and the importance of wave steepness as a key parameter in pontoon raft aquaculture systems [
41]. The comparison also indicates that the mooring line tension increases with the addition of each pontoon raft, yet not in a manner strictly proportional to the number of rafts. The increased tension suggests complex hydrodynamic interactions between the additional pontoons, which could amplify the structural loads beyond a simple summation effect. Moreover, Masoudi et al. (2024) showed that the number of pontoons significantly affects diffraction wave amplitudes, with multi-pontoon structures improving the breakwater efficiency by up to 45% within the same cross-sectional area [
44]. These findings highlight the importance of considering such interactions when designing multi-pontoon raft aquaculture systems.
4.1.2. The Maximum Mooring Line Tensions of the Three-Row PRAFs Under Wave Conditions
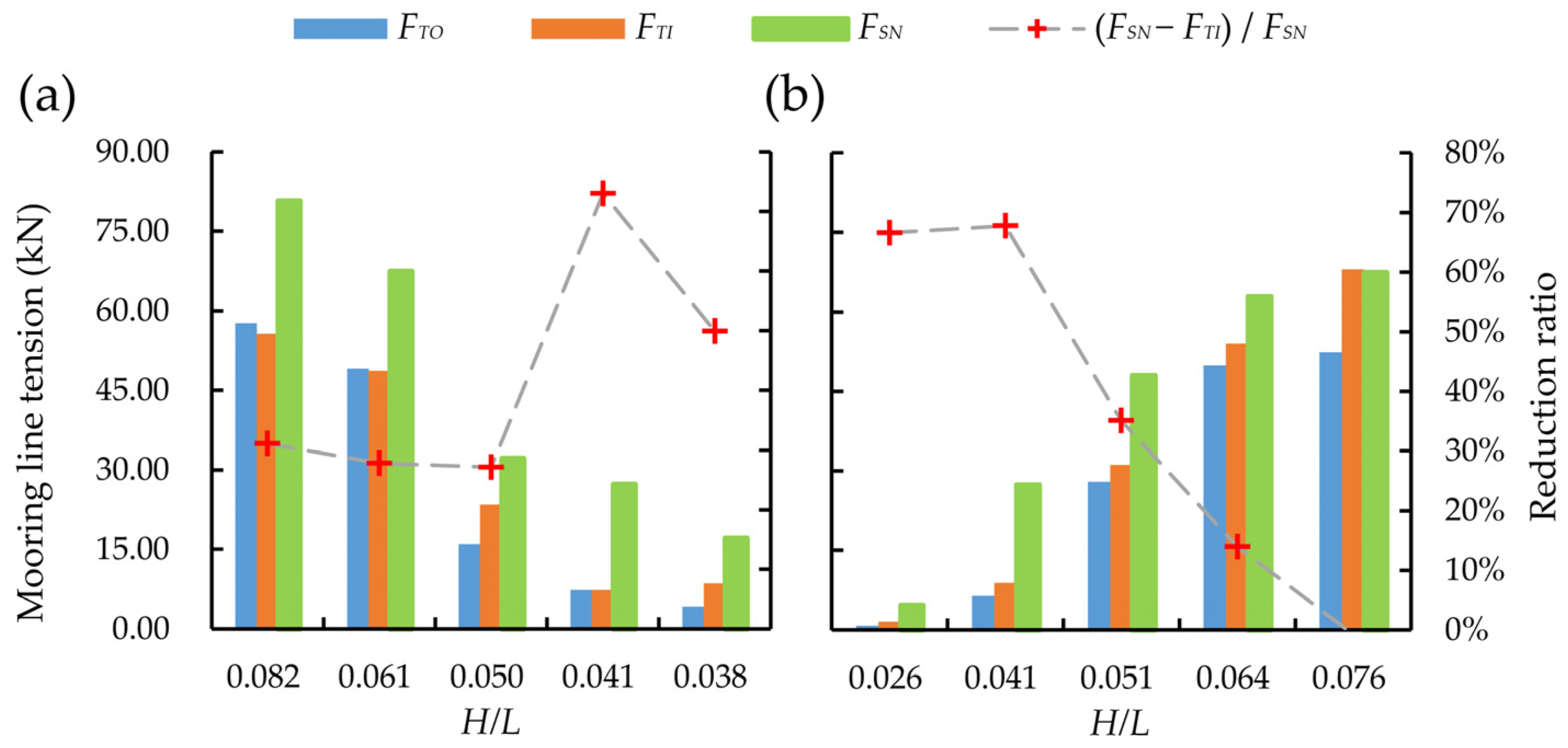
Figure 13 compares the maximum tensions of the upstream mooring line for the outer (
) and the inner (
) raft facility in the three-row PRAFs. Similar to the single-row PRAF, when the wave height was 0.1125 m, the maximum mooring line tension decreased as the wave period increased from 1.0 s to 1.4 s. However, at the wave period of 1.237 s, the maximum mooring line tension increased in response to wave heights that ranged from 0.063 m to 0.188 m. The comparison showed no significant difference between
and
, indicating that under these test conditions, whether the raft facility was located in the outer or inner position did not notably affect the mooring line tension. This finding suggests that the PRAFs in the multi-row configuration may be equally exposed to wave impact under different wave conditions.
Moreover, it can be observed in
Figure 13 that the maximum tensions of the upstream mooring line in the three-row configuration were generally smaller than those in the single-row configuration under the same wave conditions. When the wave steepness was 0.041, the maximum mooring line tension had a maximum reduction ratio of 73%. This finding suggests that the multi-row PRAFs could effectively reduce the impact of the wave forces by altering the wave propagation and promoting energy dissipation around these structures. The reduction in the maximum mooring line tension for the three-row configuration can be attributed to the intensified energy dissipation that resulted from the interference between multiple rows of pontoons, which collectively scattered and dampened the wave energy more effectively than a single-row arrangement. These results align with the work of Masoudi et al. (2024) and Li et al. (2022), who showed that the multi-row arrangement significantly reduces both the wave energy and mooring loads compared with the single-row system [
44,
45]. Furthermore, the presence of multiple rows of pontoons may create constructive and destructive interference patterns within the wave field, thereby reducing the overall force acting on individual mooring lines.
Compared with the single-row setup, the multi-row configuration distributed the hydrodynamic loads more evenly, which reduced the concentration of forces on the individual mooring lines and enhanced the overall system stability. By lowering the mooring line tension, the multi-row arrangement underscored the importance of optimizing pontoon raft layouts to improve the wave attenuation performance. Moreover, the multi-row configuration provided greater stability across a range of wave conditions and mitigated the wave-induced loads effectively, which contributed to the long-term sustainability and safety of offshore aquaculture facilities. In future work, we will continue to conduct both experimental and numerical studies to explore how different spacing arrangements affect multi-row setups. These findings will ultimately provide practical guidance for the spatial layout of multi-row raft aquaculture in offshore wind farms.
4.2. Bridle Line Tensions of PRAFs
The combination of raft aquaculture facilities offers several advantages, including enhanced comprehensive utilization of aquaculture waters, reduced equipment investment costs, and improved feasibility for large-scale management. In addition to the mooring lines, the connecting lines between individual rafts within the PRAFs are also subjected to hydrodynamic loads. This section presents the variation in bridle line tensions for both the single-row PRAF (e.g., ) and three-row PRAFs (e.g., ).
4.2.1. The Maximum Bridle Line Tensions of the Single-Row PRAF Under Wave Conditions
Figure 14 shows the relationship between the bridle line tensions
and the wave steepness under different wave conditions, with and without the presence of a wind monopile. Similar to the mooring line tension, the bridle line tension increased as the wave steepness increased. The bridle line tensions had maximums when the wave steepness approached values near 0.08. The maximum values of
were 25.82 kN, 24.96 kN, 32.80 kN, and 29.94 kN, respectively. It should be noted that the maximum values of
and
occurred with the monopile, while the maximum values of
and
occur without the monopile.
Figure 14a,b show that the presence of the monopile increased the bridle line tensions
and
with rising wave steepness, which exhibited similar sensitivities to both the wave height and wave period. In contrast,
Figure 14c,d show the presence of the monopile weakened the tensions
and
, and that these tensions were more responsive to changes in the wave height than to the wave period. This outcome aligns with the understanding that the wave height primarily affects the maximum force amplitude, whereas the wave period plays a larger role in determining the force distribution. Consequently, the increase in the wave height led to a noticeable rise in the maximum bridle line tension. Furthermore,
Figure 15a,c also demonstrate that in the presence of the monopile,
and
exceeded
and
across Cases 1–5. This was precisely the opposite of the situation without the monopile. The difference between
and
can be attributed to the distinct positions of the connecting lines within the raft system. The monopile altered the surrounding wave field, particularly the upstream region of the raft facilities, which intensified the hydrodynamic loads on the upstream bridle lines closest to it. Miles et al. (2017) found that oscillatory velocities decreased immediately behind the pile but recovered and even exceeded the background levels rapidly within a distance of approximately 1.65 to 3.5 times the pile diameter [
46]. Consequently, the first raft in the wave propagation direction (located 3.15 m from the monopile center, i.e., beyond 3.5 times the diameter of the pile) experienced greater wave forces than in the no-monopile scenario while consuming more wave energy, and thus, exposing subsequent rafts to lower significant wave heights (
). This phenomenon underlay the marked differences in
and
between the monopile and no-monopile configurations. In the future, further research is required to investigate the effects of the geometric parameters of the monopile, wave characteristics, and other factors on the hydrodynamic performance. This will facilitate a more comprehensive understanding and enable improved prediction of the hydrodynamic responses of raft aquaculture facilities in offshore wind farms.
Figure 15 also shows the mooring and bridle line tensions for a single-row PRAF under different wave conditions with and without the monopile. The tensions
remained lower than
or
, and the mooring line tensions rose more sharply than the bridle line tensions as the wave period decreased or the wave height increased. These observations differed from the findings of Martinelli et al. (2008) on the floating breakwaters [
47]. This was because in this study, both the mooring line and bridle line were in a slack state initially, and the mooring line was exposed to the incident wave earlier. Their peak values did not coincide due to phase differences between the rafts. In contrast to the mooring lines, which largely responded to the incident wave, the bridle line tensions arose from interactions between the adjacent rafts.
and
measured the connecting forces between pairs of rafts, where each raft experienced distinct motion states. Furthermore, the wave energy was dissipated through impacts and reflections on the mussel ropes and pontoons, which led to varying hydrodynamic loads on each raft. According to Liao et al. (2017), combined raft structures under regular wave conditions can substantially reduce mooring forces, suggesting that combined raft structures may outperform single raft structures in terms of wave-induced loads if the ropes of the system are strong enough [
48].
4.2.2. The Maximum Bridle Line Tensions of the Three-Row PRAFs Under Wave Conditions
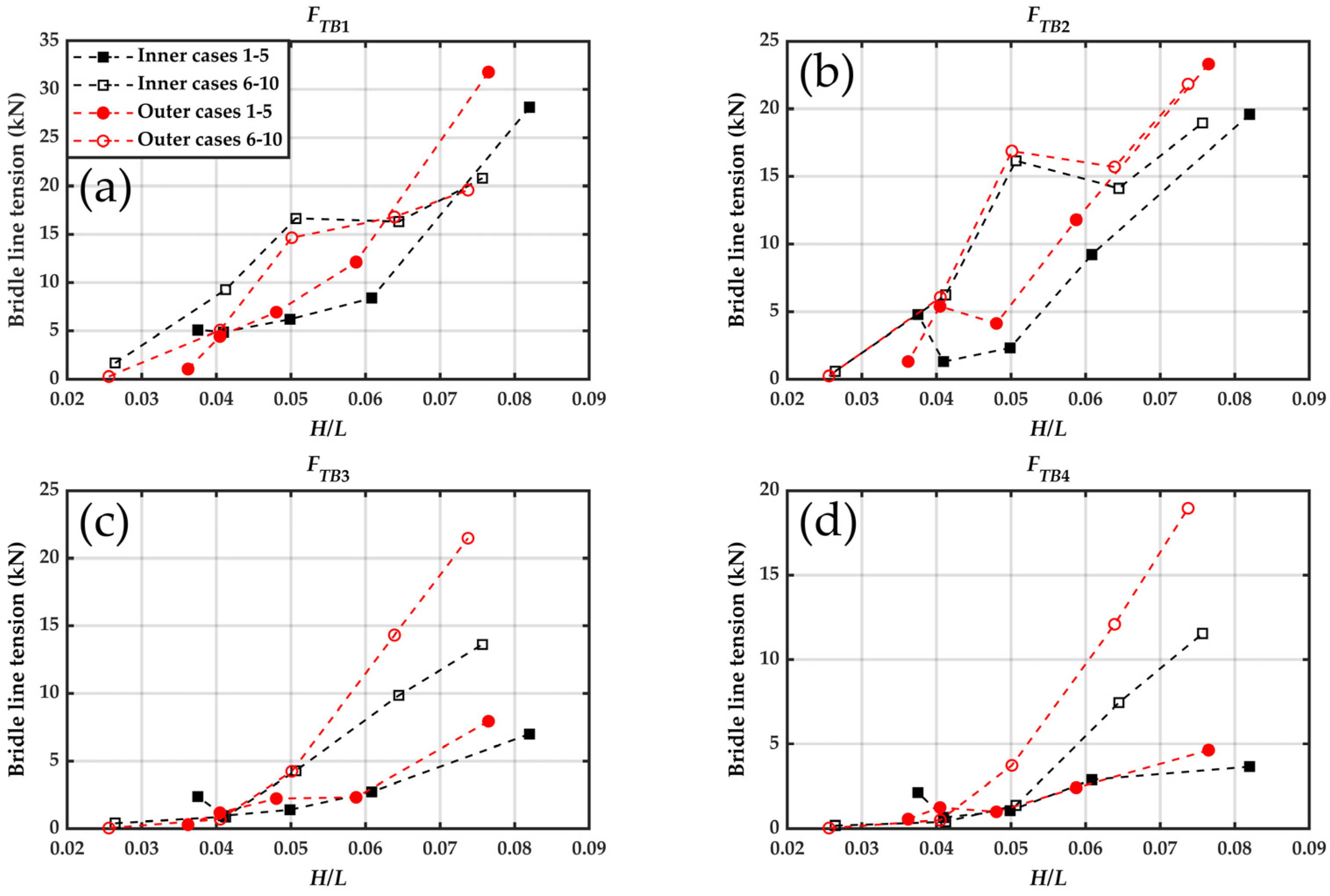
Figure 16 shows the effects of different wave periods and wave heights on the bridle line tensions
, including the outer structure and inner structure of the three-row PRAFs.
tended to increase with increasing wave steepness. As the wave steepness approached 0.08,
had maximum values of 31.79 kN, 23.30 kN, 21.47 kN, and 18.95 kN, respectively.
Figure 16a,b indicate that
and
of the outer structure were slightly higher than those of the inner structure with rising wave steepness. The sensitivities of
and
to the wave height and wave period were not obvious.
Figure 16c,d indicate that
and
of the outer structure were notably greater than
and
of the inner structure with increasing wave steepness, and the sensitivities of
to changes in the wave height were stronger than in the wave period.
In the three-row PRAFs, significant interactions between the structures were observed. The bridle line tension results suggest that the inner structure exhibited greater stability under varying wave conditions. This can likely be attributed to the redistribution of the wave field after the waves encountered the raft system. In the three-row configuration, the outer structures diffracted the incoming waves around both sides, which caused these wave components to converge upon the inner structure. Because the converging waves often arrived with varying phases, partial destructive interference occurred, which effectively reduced the local wave energy around the inner structure and led to lower hydrodynamic loads, especially under stronger wave conditions (e.g., high wave height or greater wave steepness). These findings highlight the importance of wave interference and energy reduction for multi-row configurations, which inspires the spatial deployment of offshore aquaculture.
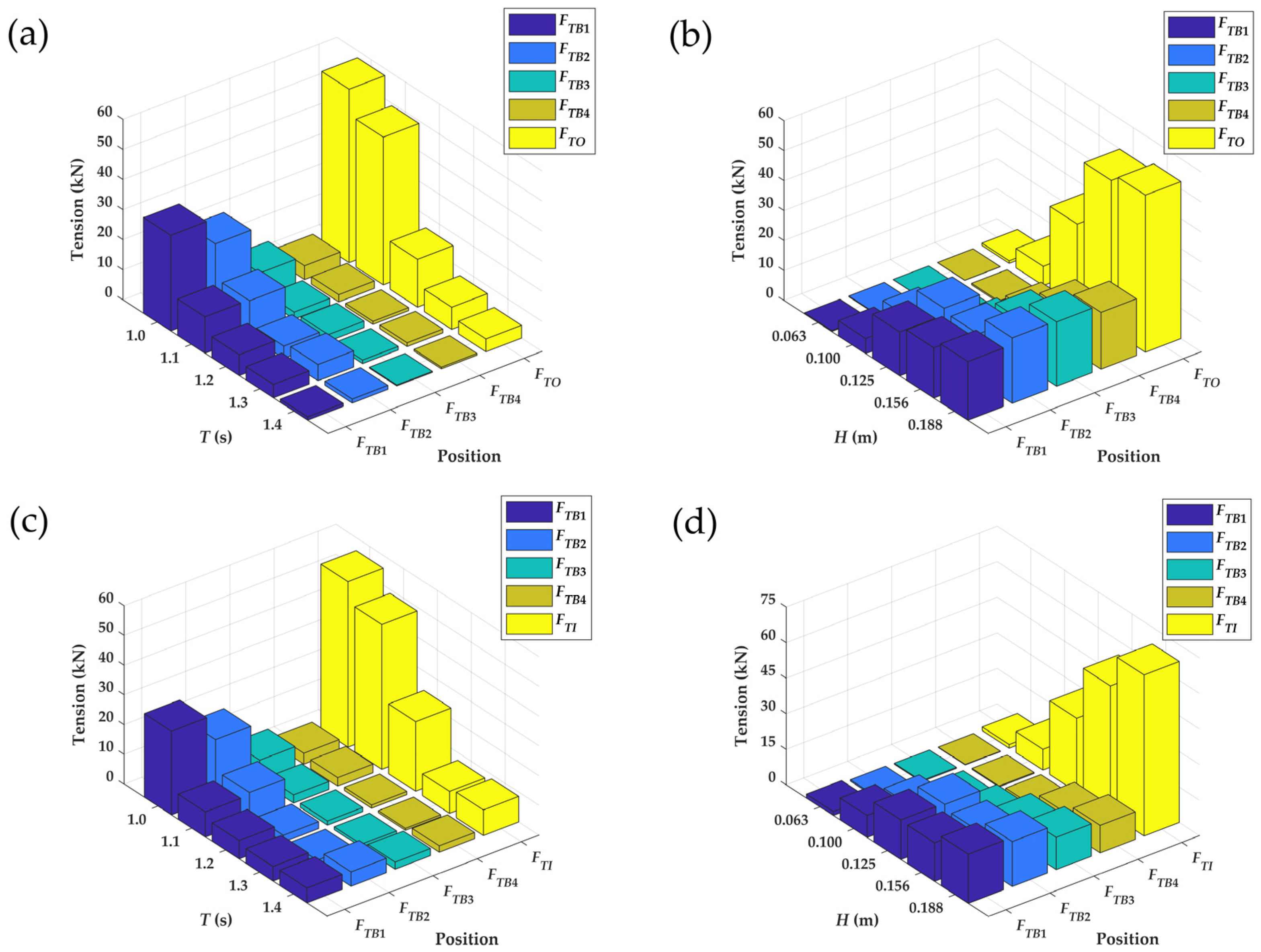
Figure 17 compares the mooring line tensions (
,
) and bridle line tensions (
) for the three-row PRAFs under different wave conditions. Overall, these tensions (
) tended to remain lower than the upstream mooring line tensions
or
. However, under more energetic wave conditions (e.g., larger wave heights or steeper waves), especially at shorter wave periods, the tensions in
and
became significantly higher than
and
. This phenomenon indicates that shorter-period, high-steepness waves imparted greater localized loads on the forward bridle lines than on those positioned further inward.
The primary reason for the observed tension difference was the attenuation and the redistribution of wave energy caused by the multi-row configuration. In the single-row configuration, the rear rafts were directly exposed to waves that had undergone minimal dissipation, which led to cumulative wave impacts on the trailing rafts. By contrast, in the three-row configuration, the upstream raft directly encountered the undisturbed incident waves and experienced higher hydrodynamic loads on the front bridle lines. Acting much like a small breakwater, these upstream rafts dissipated a portion of the wave energy through diffraction, viscous effects, and local turbulence, and thus, reduced the wave forces transmitted to the subsequent rafts.
Furthermore, the constructive and destructive interference patterns that arose from the wave diffraction at the edges of the upstream rafts redistributed the hydrodynamic loads between the inner and rear rows. In particular, the destructive interference could diminish the wave amplitudes in the lee of the front row, which lowered the bridle line tensions downstream. Additionally, the shadowing effect of the front-row rafts provided further protection for the interior and rear rows from the full incident wave energy.
In summary, the difference in tension distribution between the single- and three-row raft systems can be attributed to the combined mechanisms of the wave energy dissipation, interference, and shadowing effects. As illustrated in
Figure 13, the three-row configuration effectively decreased the wave forces on the downstream rafts, which resulted in lower overall mooring line tensions. In contrast, a single-row arrangement exposed the raft directly to the undistributed wave field, which led to higher cumulative forces on its mooring line.
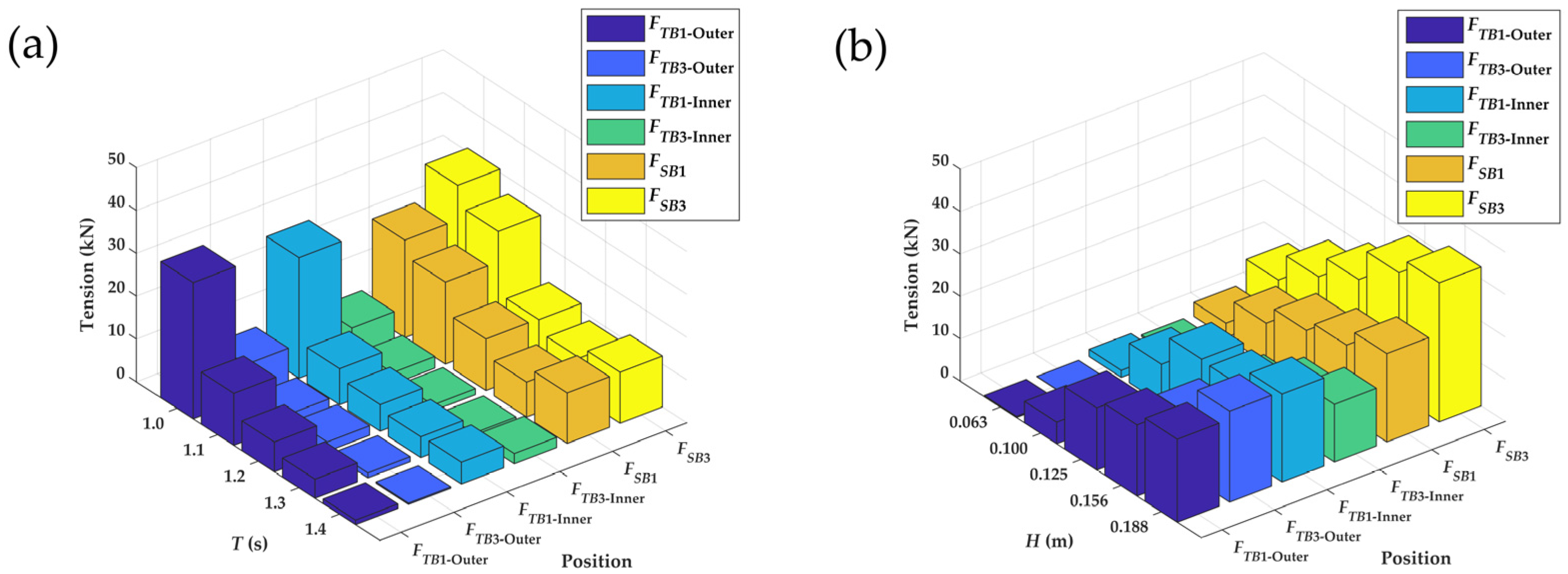
Figure 18 shows the comparison of the bridle line tensions of the single-row PRAF (
and
) and those of the three-row raft facilities (
and
). The results indicate that the three-row configuration generally reduced the bridle line tensions compared with the single-row configuration, except under the condition of
= 1.0 s and
= 0.1125 m, where
exceeded
. As shown in
Figure 17a,
under this specific condition appeared to be an abnormal value. One possible explanation was that certain components of the three-row PRAFs may have a natural vibration period similar to the incident wave period (
= 1.0 s), which led to localized resonance and generating the higher-than-expected bridle line tensions. This phenomenon suggests that resonance effects in a multi-row configuration can significantly impact structure loads under specific wave conditions. Martinelli et al. (2008) also observed that under perpendicular wave conditions, mooring and intermodal connector forces can vary significantly with increasing layout complexity [
47]. Therefore, the findings highlight the importance of optimizing the spatial layout of aquaculture facilities to enhance their hydrodynamic performance and reduce structural loads, particularly in multi-row configurations.
4.3. The Impact of the Monopile Foundation on the Wave Propagation
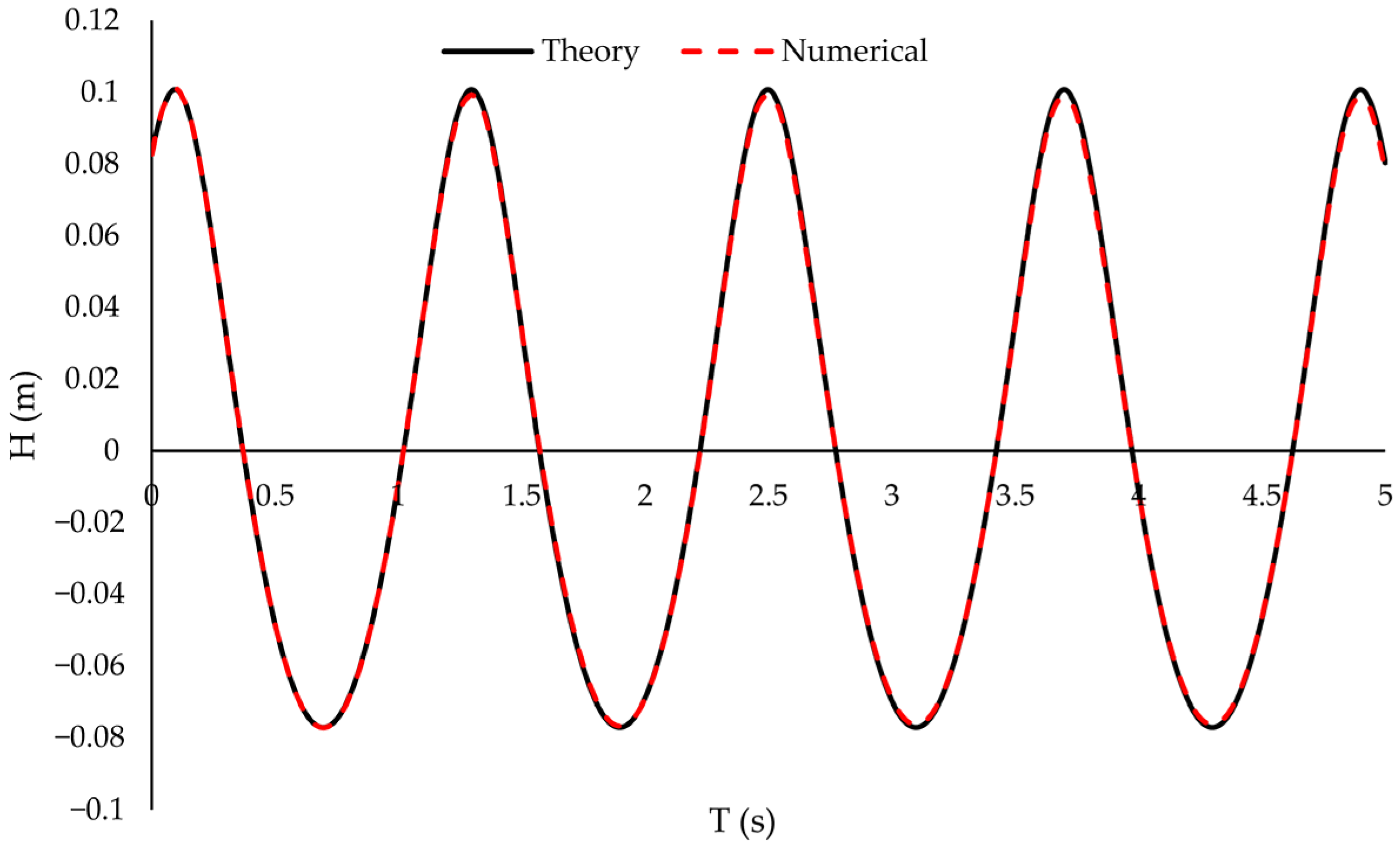
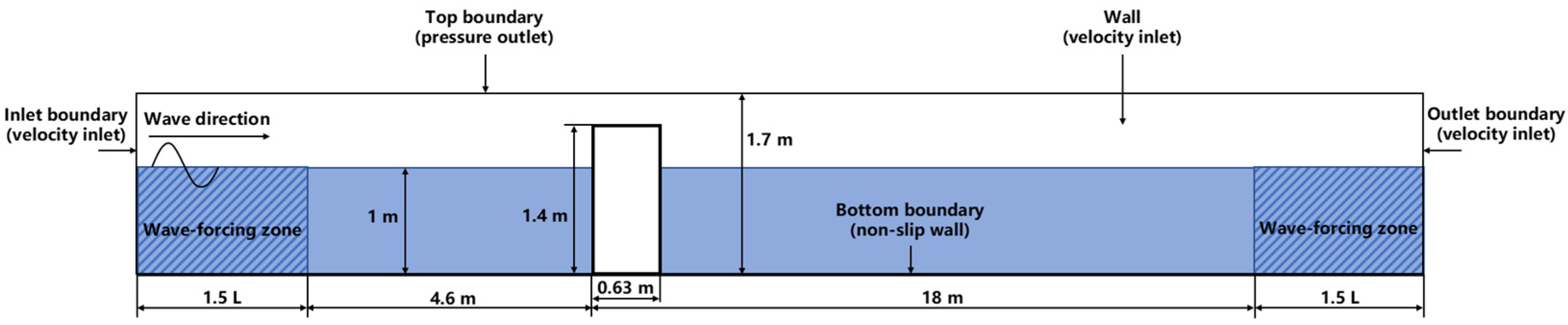
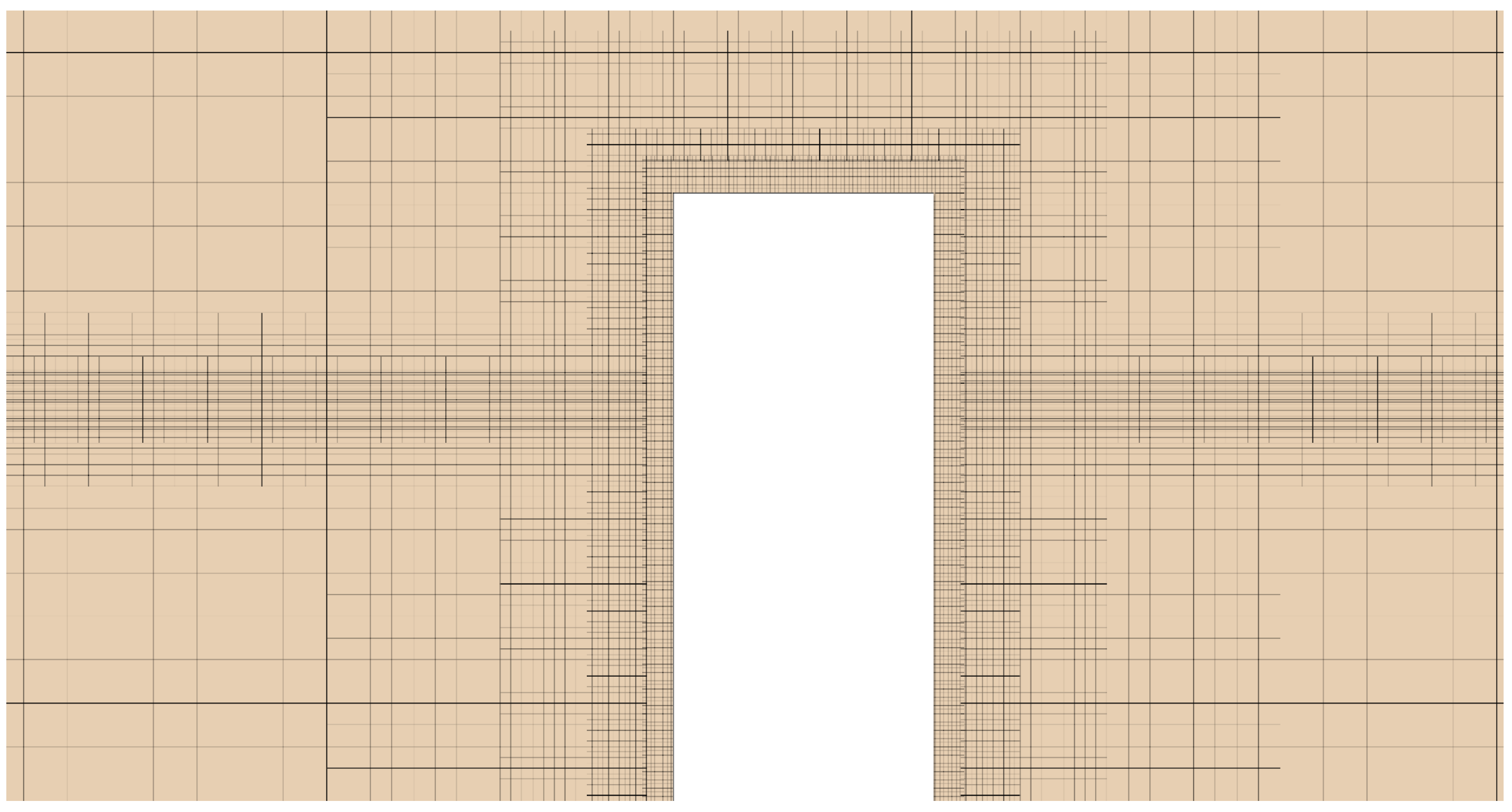
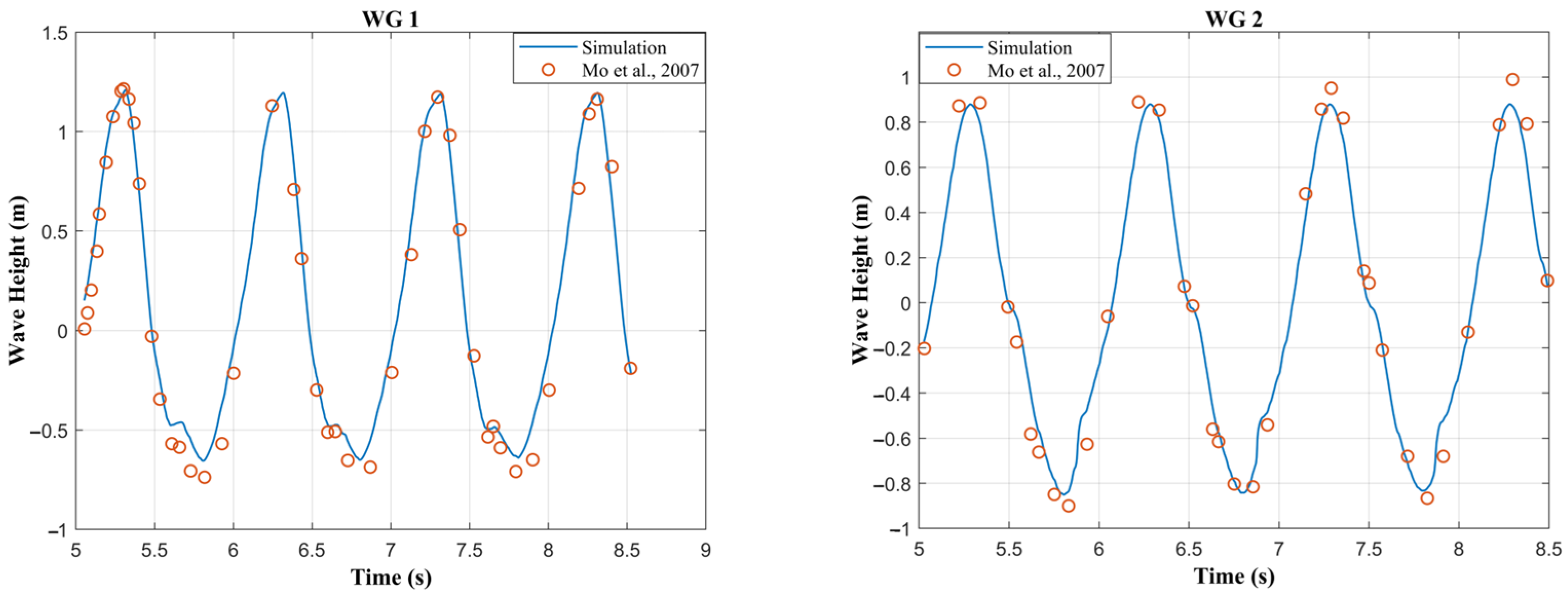
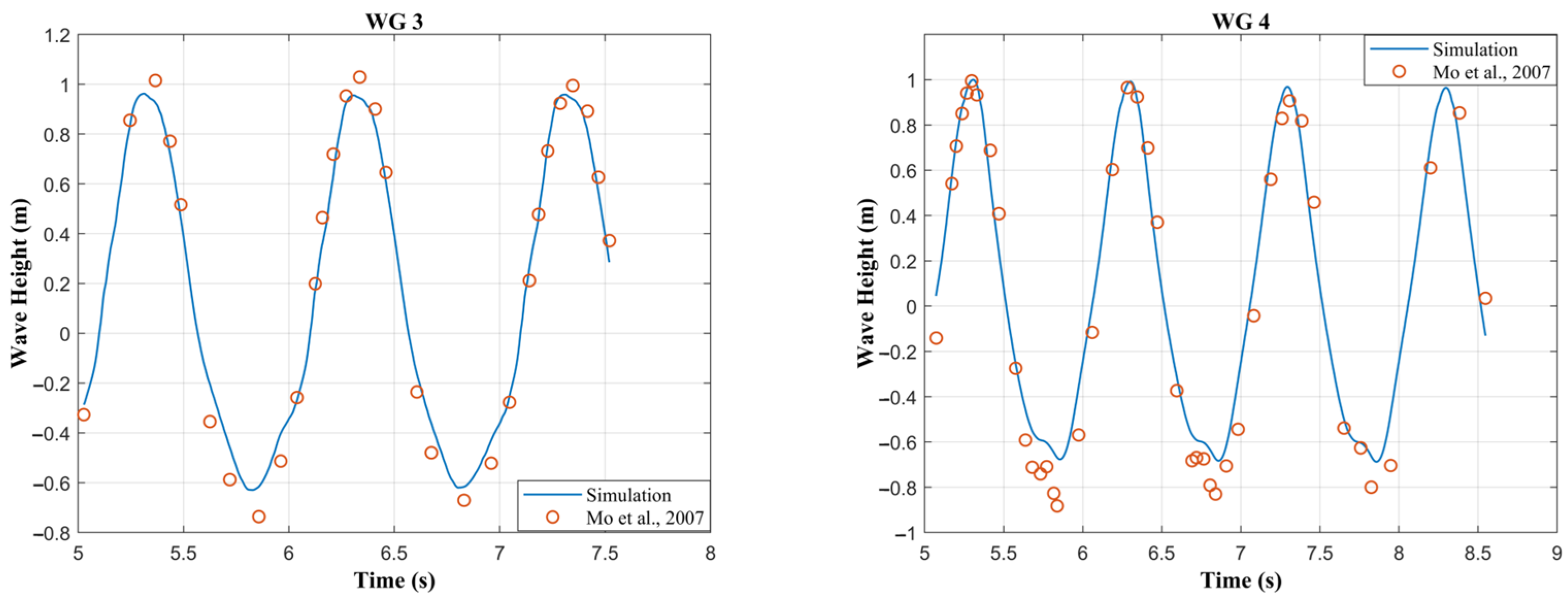
In this section, we examined how the presence of the wind turbine monopile foundation influenced the wave propagation and, consequently, the mooring line tensions of the raft aquaculture system. Detailed validation of the numerical flume model against the experiment by Mo et al. [
49] is provided in
Appendix A, which confirmed that our simulation setup reliably captured key wave–structure interactions.
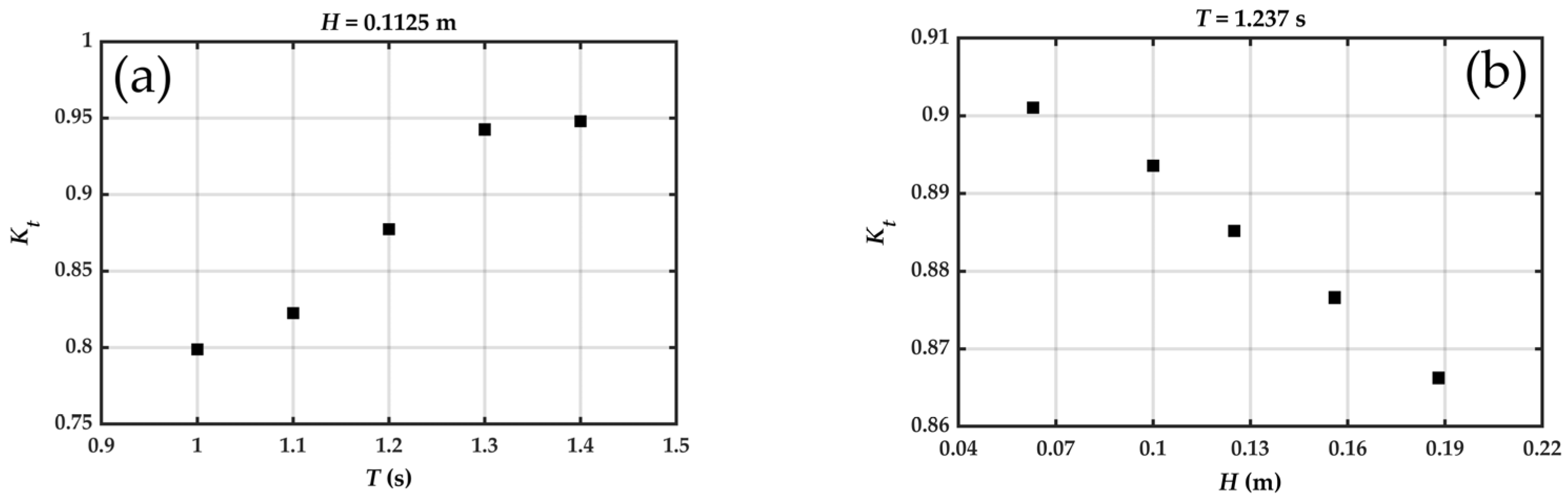
The numerical results are shown in
Table 3. The transmission coefficient (
/
) is an important coefficient used to reflect the wave attenuation performance of the monopile. In Cases 1–5,
decreased with the increase in
and
was greater than 0.799. When
> 0.2, the diffraction effects of waves start to become significant [
50]. In the design of a breakwater,
> 0.25 is considered as a reference to be able to effectively resist waves [
44]. This rule coincides with our results. The presence of the monopile helped to reduce the wave height in the transmitted region. This study concentrates on the
. As shown in
Figure 19, it can be seen that
increased with increasing wave period and decreased with increasing wave height.
Figure 20 shows the relationship between the reduction in the mooring line tension
(
) and the attenuation coefficient
(
). For Cases 1–5, when
< 0.07 (
< 0.25),
could not be used as a reference for the change in the mooring line tension because the monopile was not a means of wave attenuation in this condition.
increased initially from 0.12 to 0.18 of
and decreased from 0.18 to 0.2 of
. For Cases 6–10,
increased initially from 0.1 to 0.11 of
and decreased from 0.11 to 0.13 of
. Consequently, the response of
to
was more sensitive to the wave height compared with the wave period, which suggests that when the wave period was constant, the wave height condition was more restrictive to maintain a high
. As shown in
Figure 20, when
ranged from 0.11 to 0.20, the monopile could effectively reduce the mooring line tension of the PRAF.
Therefore, the numerical results corroborate the experimental finding that the mooring line tensions were reduced in the presence of the wind turbine monopile. For instance, under moderate wave steepness (
H/
L = 0.03), we observed an up to 40–50% tension reduction on the mooring lines behind the monopile compared with no monopile. This reduction can be explained by
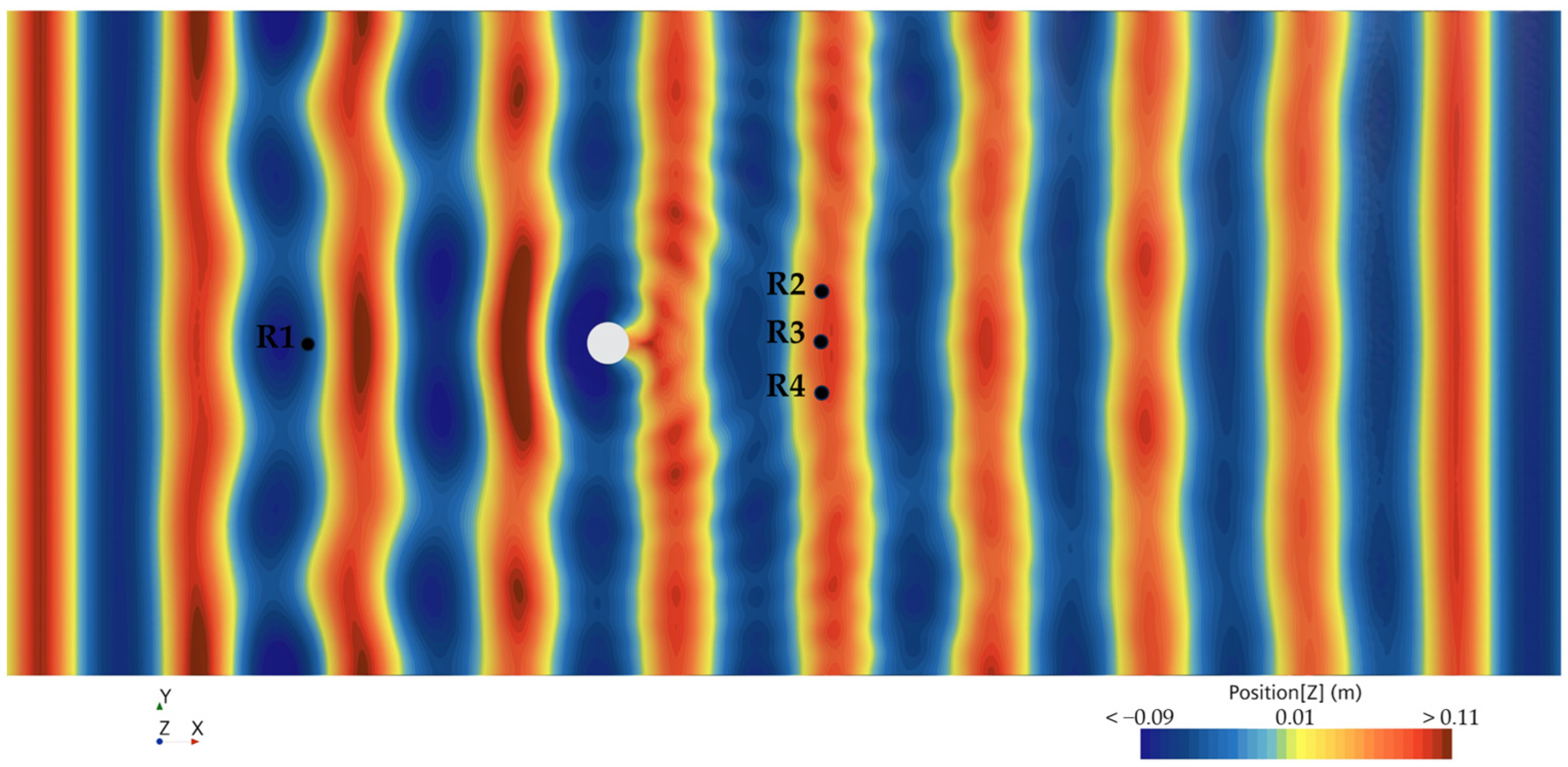
Figure 21: (i) wave diffraction around the monopile edges, where we can see a downstream “shadow zone” with lower wave amplitude, and (ii) partial reflection and turbulence-induced dissipation near the monopile surface, where high waves were formed in front of the monopile due to the superposition of reflected and incident waves. As the wave steepness increased, the local flow separation and vortex shedding enhanced these dissipation effects, which further decreased the transmitted wave energy. This wave energy reduction was particularly beneficial for the multi-row raft arrangements. The rafts located behind the monopile were subjected to smaller wave heights, which experienced reduced hydrodynamic loading and lower peak tensions in the mooring system. Combined with the physical experiments on the single-row and three-row raft systems, the numerical analysis confirmed that strategically placing a monopile upstream could serve as a mini-breakwater, which shielded the aquaculture rafts from fully developed waves. As the wave energy was partially blocked or scattered, the inner and rear rows experienced reduced the hydrodynamic loads and consequently lowered the mooring line tensions. Thus, if multiple rows of PRAFs are placed behind a monopile, the wave field will first undergo diffraction at the pile, then interact with the leading PRAF row, further attenuating the wave energy for the subsequent rows. The second or third rafts will experience a significantly reduced disturbance, lowering both the motion amplitude of the rafts and the peak loads on the mooring line. These mechanisms are crucial for optimizing large-scale aquaculture system configurations in wind farm areas, contributing to both the economic efficiency and structural safety considerations.
4.4. The Impact of the PRAF on the Wave Force Acting on the Monopile Foundation and the Surrounding Wave Field
In actual offshore wind farms, a monopile is subjected to multiple simultaneous loads, including those from wind, waves, and currents. However, this study specifically focused on the interaction between the monopile and the PRAF within the integrated structure. When the monopile foundation was used as the anchorage point for the PRAF, the influence of the PRAF on the monopile force was mainly reflected in two aspects: one was the mooring line tension, as the PRAF exerted a direct tension on the monopile foundation, and the magnitude of this part of the force had already been measured by the model flume test; the second was the additional hydrodynamic loading on the monopile foundation from reflected waves generated by the PRAF. To study the mechanism underlying these interactions, we conducted a comparative analysis of the forces that acted on the monopile foundation in two scenarios: “with PRAF” and “without PRAF”. This approach enabled us to quantify the extent to which the PRAF influenced the wave loads on the monopile foundation. Through this comparative study, we aimed to provide a comprehensive assessment of the additional effects associated with the deployment of the PRAF around the monopile foundation.
As shown in
Table 4, the deployment of the single-row PRAF behind the monopile foundation resulted in a reduction in the wave forces that acted on the monopile. Specifically, the forces decreased by 8.75%, 1.59%, and 1.35% for the incident wave period of 1.237 s and wave heights of 0.063 m, 0.125 m, and 0.188 m, respectively. However, when the three-row PRAFs were deployed, an increase in the wave forces on the monopile foundation was observed, with increases of 3.77%, 1.00%, and 2.46% corresponding to the same wave conditions. These findings indicate that the influence of the PRAF on the wave force experienced by the monopile foundation was relatively minimal.
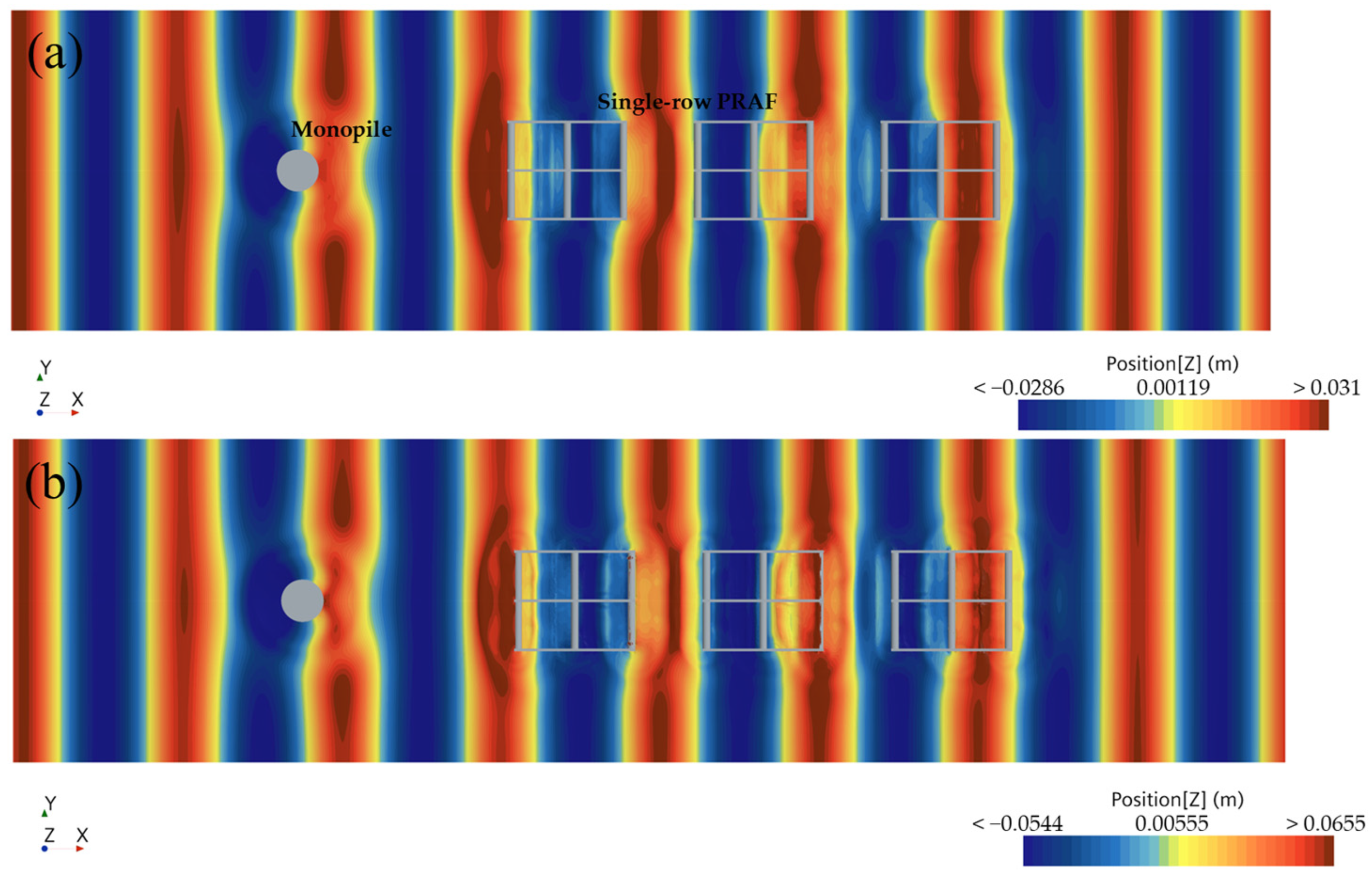
Figure 22 shows the effects of the monopile foundation and single-row PRAF on the wave dynamics. As the waves propagated, there were obvious diffraction and reflection phenomena that occurred around the monopile foundation and the PRAF, which resulted in corresponding changes in the distribution of wave heights in both the upwind and downwind areas that surrounded these structures. It can be observed that the wave height behind the monopile foundation was weakened, which formed a localized wave shadow area, which showed a typical diffraction phenomenon. The PRAF that was positioned downstream of the monopile foundation exhibited a significant distortion in the wave color bands in its vicinity. This indicates that the reflected waves from the PRAF were superimposed with the waves diffracted by the monopile foundation, which led to a wave interference phenomenon. Additionally, as the wave height increased, the expansion of the wave color band areas that surrounded both the monopile foundation and the PRAF became increasingly pronounced, which signified an enhancement in the disturbance intensity of the wave field caused by these structures. As presented in
Table 4, the wave height
in front of the pile was significantly larger than the incident wave height, and the wave run-up increased as the incident wave height rose. Due to wave diffraction, the wave height
along the side of the monopile experienced only slight variations, whereas the wave height
behind the pile decreased. These numerical results support the observations made in
Figure 21. When comparing the scenario in which only the monopile was present to the case that included the PRAF, it is evident that the presence of the PRAF slightly reduced
while it increased both
and
. And the PRAF further changed the wave propagation characteristics behind the pile, which made the distribution of the wave field around the pile more complicated. Therefore, the PRAF had a certain weakening or redistribution effect on the local wave field, although this effect caused only a slight change in the wave height.
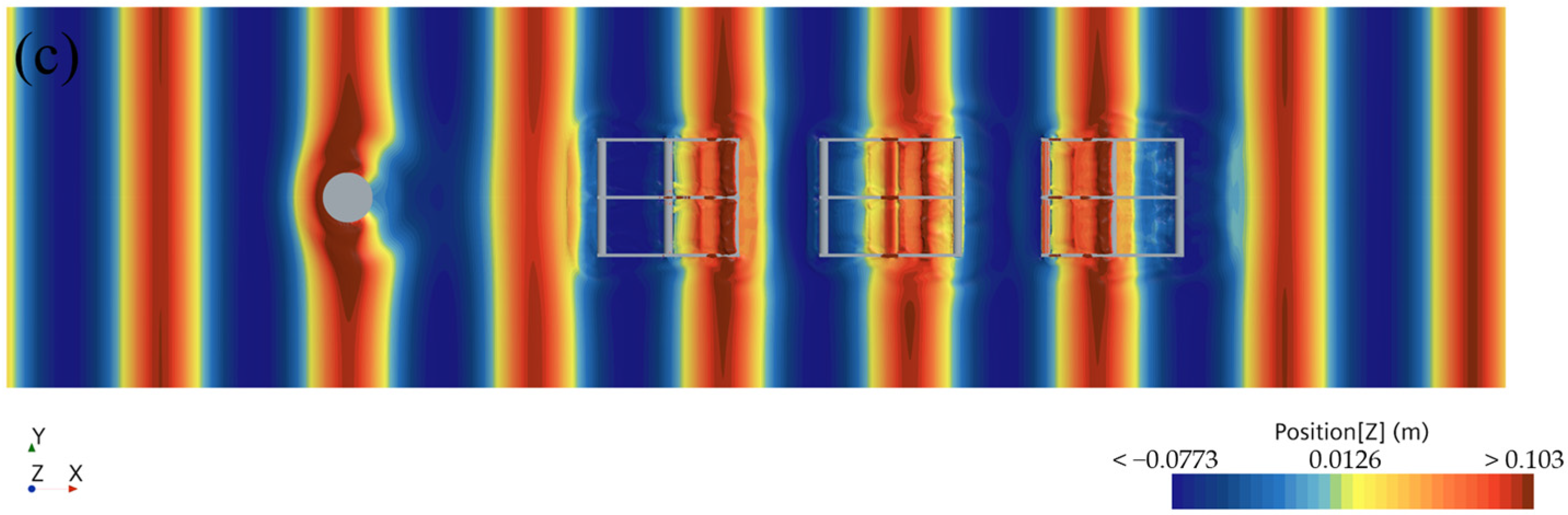
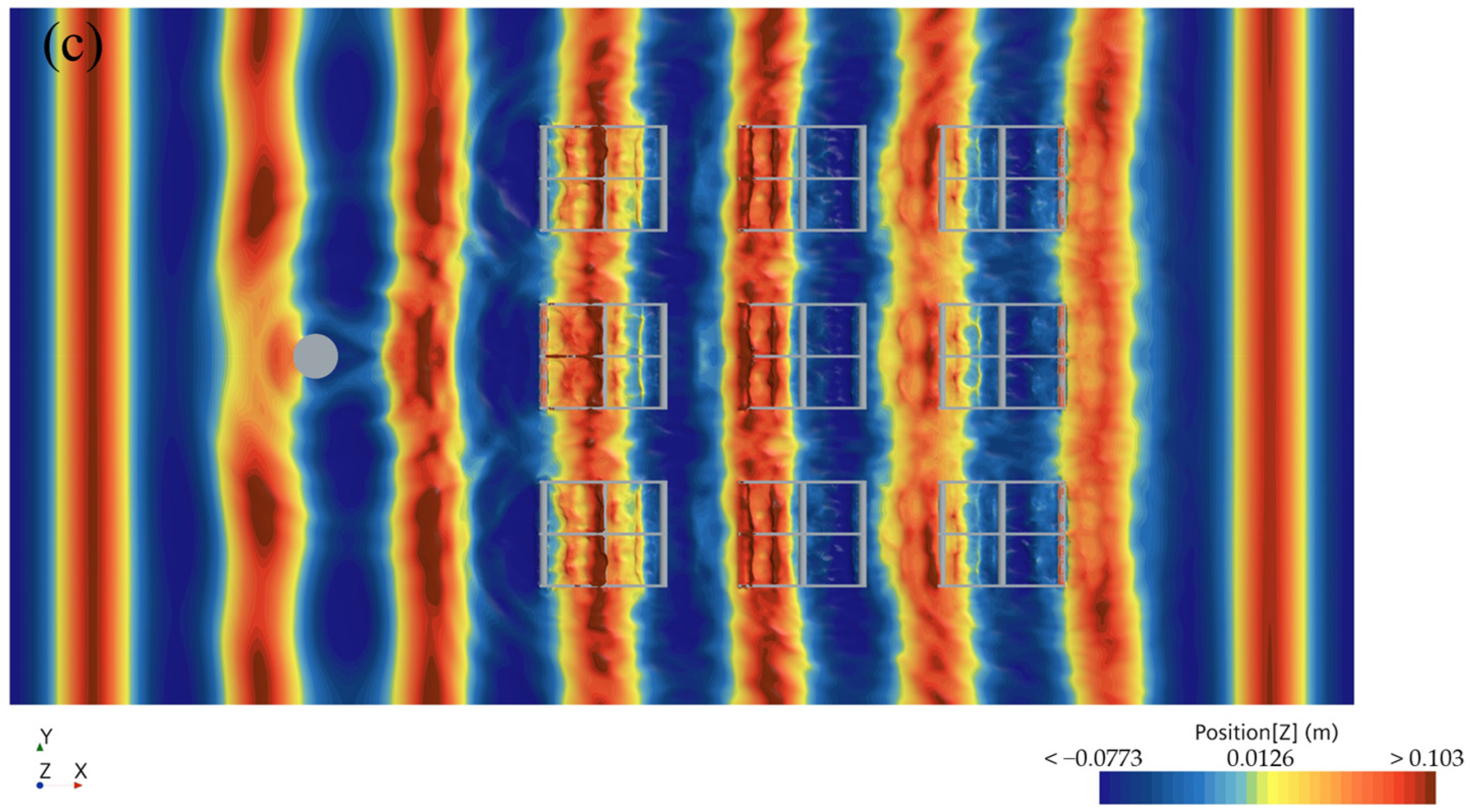
Figure 23 illustrates the impacts of the monopile foundation and the three-row pontoon raft aquaculture facilities (PRAFs) on the wave dynamics. The variations in wave heights depicted in this figure reveal that both the monopile foundation and the three-row PRAFs created distinct sheltered areas within the overall wave field. Compared with the single-row PRAF, the three-row configuration exhibited more pronounced reflection and diffraction phenomena, which affected a larger area of the wave field. Notably, the wave heights in the regions between the rafts showed a regular ripple-like distribution. As the wave height increased, the fluid–structure coupling effects became more pronounced, which led to an increase in local wave heights due to enhanced reflection and diffraction. However, the presence of the three-row PRAFs exerted only a minimal effect on the wave heights around the monopile foundation itself.
5. Conclusions
In this study, we investigated the hydrodynamic performance of a PRAF placed around a wind farm monopile under different wave conditions. Our experimental and numerical analyses focused on the mooring line and bridle line tensions, with an additional emphasis on how wave height attenuation impacts these forces. The results yield several key insights that have broader significance for designing and deploying integrated offshore wind–aquaculture systems:
- (1)
Influence of wave parameters
The mooring line and bridle line tension of the PRAF consistently decreased with the increasing wave period and increased with increasing wave height. This finding underscores the critical role of wave steepness (H/L) in determining the magnitude of the hydrodynamic forces. By highlighting specific wave conditions, particularly within the range of 0.02 to 0.09 of H/L, this study helps designers anticipate and manage peak loads more effectively.
- (2)
Effects of the wind farm monopile
Both the experimental and computational results demonstrate a significant sheltering effect behind the monopile. Part of the incoming wave energy was reflected or dissipated at the front side of the monopile, which decreased the wave energy available in the downstream region. The presence of a wind monopile significantly impacted both the mooring line tension and the bridle line tension for the PRAF. The mooring line tension was reduced, and the reduction ratio decreased when the wave steepness increased, where it ranged from 16% to 66%. Furthermore, there was an increase in the bridle line tension on the upstream component, with a decrease in the bridle line tension on the downstream component.
- (3)
Significance for multi-row PRAF configurations
The results from the single-row and multi-row PRAF arrangements highlight a clear attenuation effect and a more even distribution of hydrodynamic loading in multi-row configurations. This is particularly relevant for large-scale offshore aquaculture operations, where a multi-row layout can enhance the resilience to extreme waves and reduce the peak stresses on individual lines to improve both the safety and long-term durability. Thus, in the future, we have an opportunity to achieve robust structural performance by optimizing the raft layouts, a crucial step for large-scale applications in offshore wind farms.
- (4)
Wave height loss of waves passing around the monopile
Wave height attenuation occurred as the waves propagated around the monopile, where the wave height loss () ranged from 5% to 20%. It was observed that the monopile’s influence on the wave height diminishes with an increasing wave period. Additionally, a greater wave height corresponded to an increased . When ranged from 0.11 to 0.20, the presence of the monopile could effectively reduce the mooring line tension of the PRAF. Meanwhile, our results show that using the monopile itself as a mooring point may induce a high-level mooring load, potentially affecting the monopile’s stability and safety. We therefore advise caution and do not recommend directly attaching the PRAF mooring lines to the monopile in practical applications.
- (5)
Influence of the PRAF on the force on the monopile foundation
The numerical simulation results show that a single-row PRAF deployed behind the monopile could reduce the wave forces on the foundation by up to 8.75% for certain conditions, while the three-row PRAF setups produced minor increases in forces (up to 4%). Overall, the impact on the monopile wave forces remained minimal, indicating the viability of rationally deploying PRAFs in offshore wind farms.
In conclusion, these research findings provide valuable insights into the co-location of offshore wind and aquaculture systems. By placing PRAFs near a wind monopile, existing infrastructure can be effectively utilized, thus conserving marine space and mitigating hydrodynamic loads. Nevertheless, due to the inherent complexity of marine environments, this study primarily examined wave-induced responses. A more comprehensive investigation of wind, combined wave–current, and combined wind–wave effects remains an important avenue for future work. Moreover, the geometric dimensions of the monopile and the configuration of aquaculture facilities have a significant influence on the force distribution and motion behavior. Consequently, subsequent investigations should extend to multiple environmental loading scenarios and conduct deeper analyses of monopile geometry and aquaculture layout. From a modeling perspective, developing refined hydrodynamic and structural coupling models for PRAFs in offshore wind farms will optimize the facility design under a wider range of sea states, ensuring both structural stability and operational efficiency. Advancing these research directions will further support the sustainable development of offshore wind–aquaculture integration.


 ,
, 

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}