
Adaptive Sliding Mode Fault-Tolerant Tracking Control for Underactuated Unmanned Surface Vehicles


Abstract
1. Introduction
- By combining the backstepping method and the fast terminal sliding mode method, the ship can track the path. Compared with the traditional sliding mode, the fast terminal sliding mode has the advantages of increased convergence speeds, robustness, and effective chatter elimination.
- A radial basis function (RBF) neural network is used to approximate the synthetic disturbances consisting of external disturbances, unmodeled system, actuator non−executed portions and actuator bias faults.
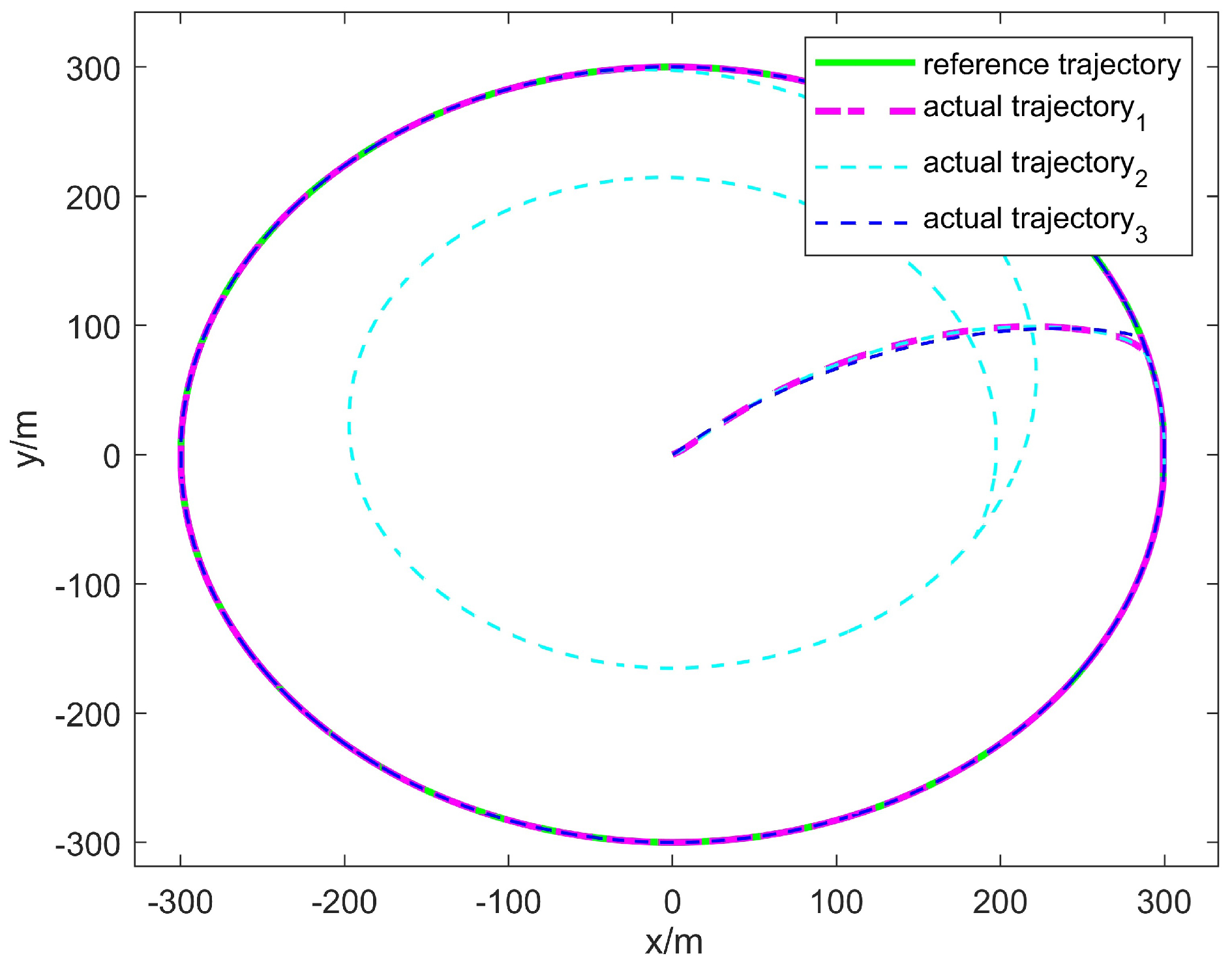
- The designed adaptive sliding mode controller can simultaneously handle the case of simultaneous faults of two actuators.
2. Preliminary
2.1. RBF
2.2. Young’s Inequality
3. Problem Formulation
3.1. USV Model
3.2. Actuator Model
4. Adaptive Control Law Design
4.1. Virtual Control Law Design
4.2. Surge Adaptive Control Law Design
4.3. Steering Torque Adaptive Control Law Design
4.4. Yaw Stability Analysis
5. Simulation Results
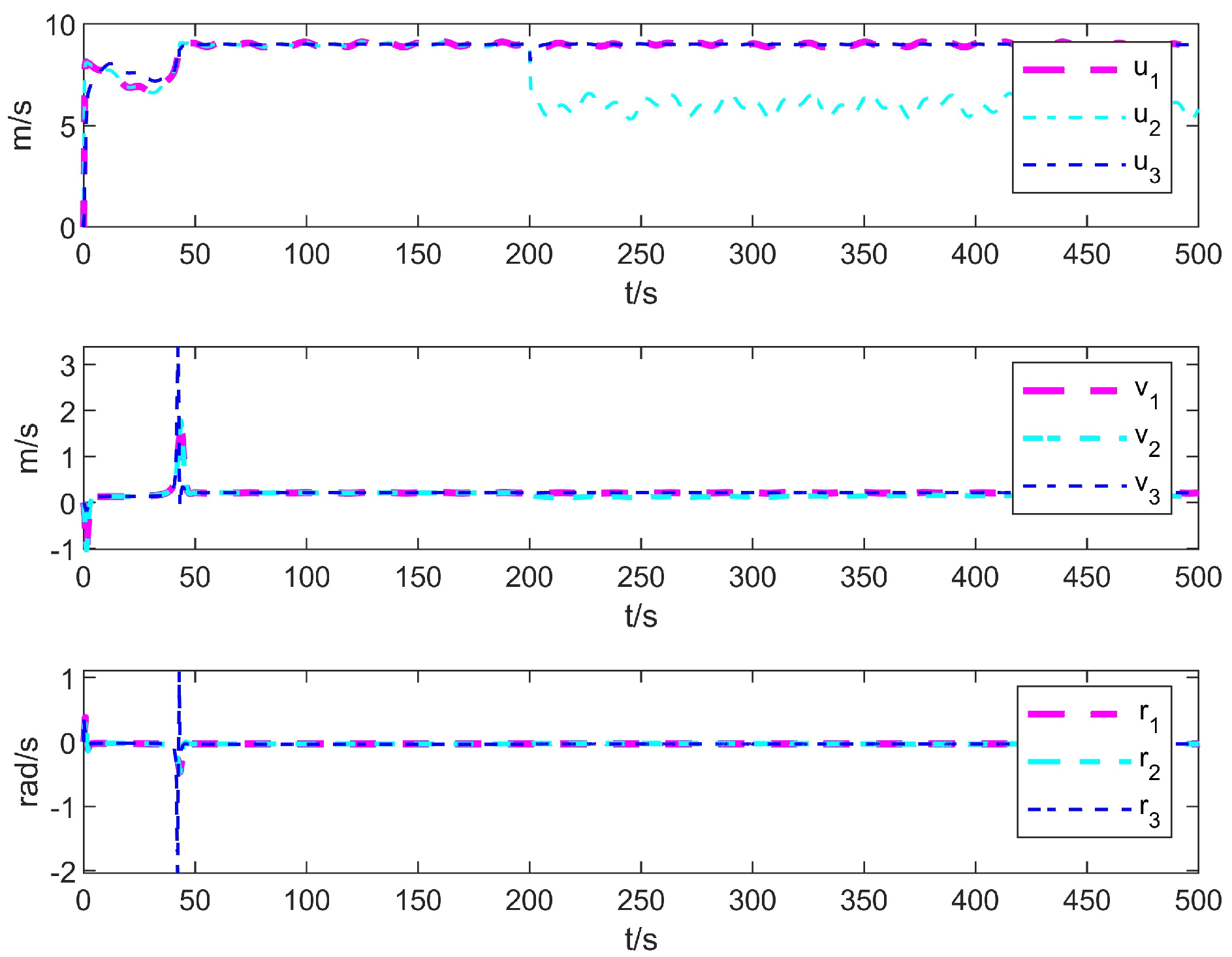
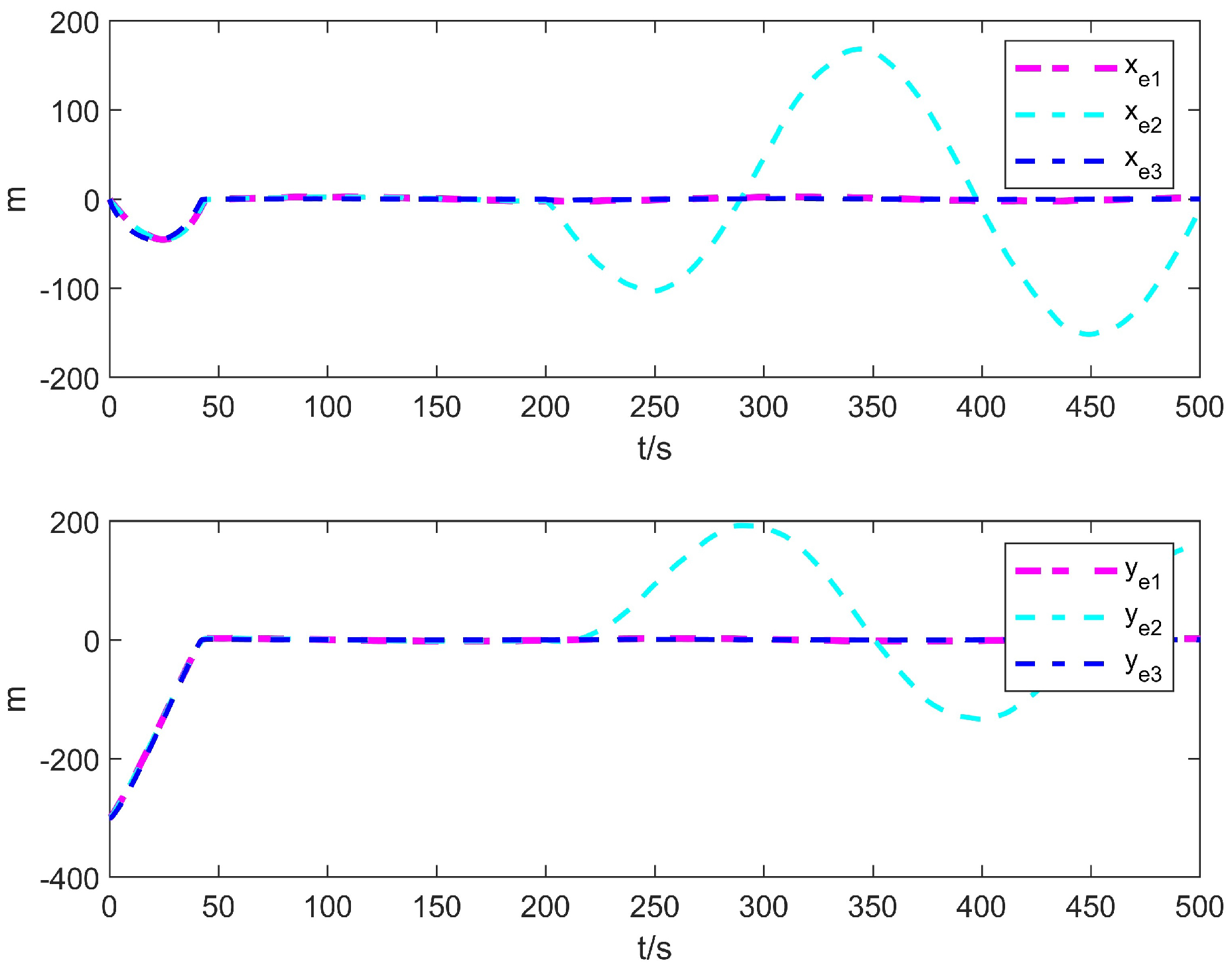
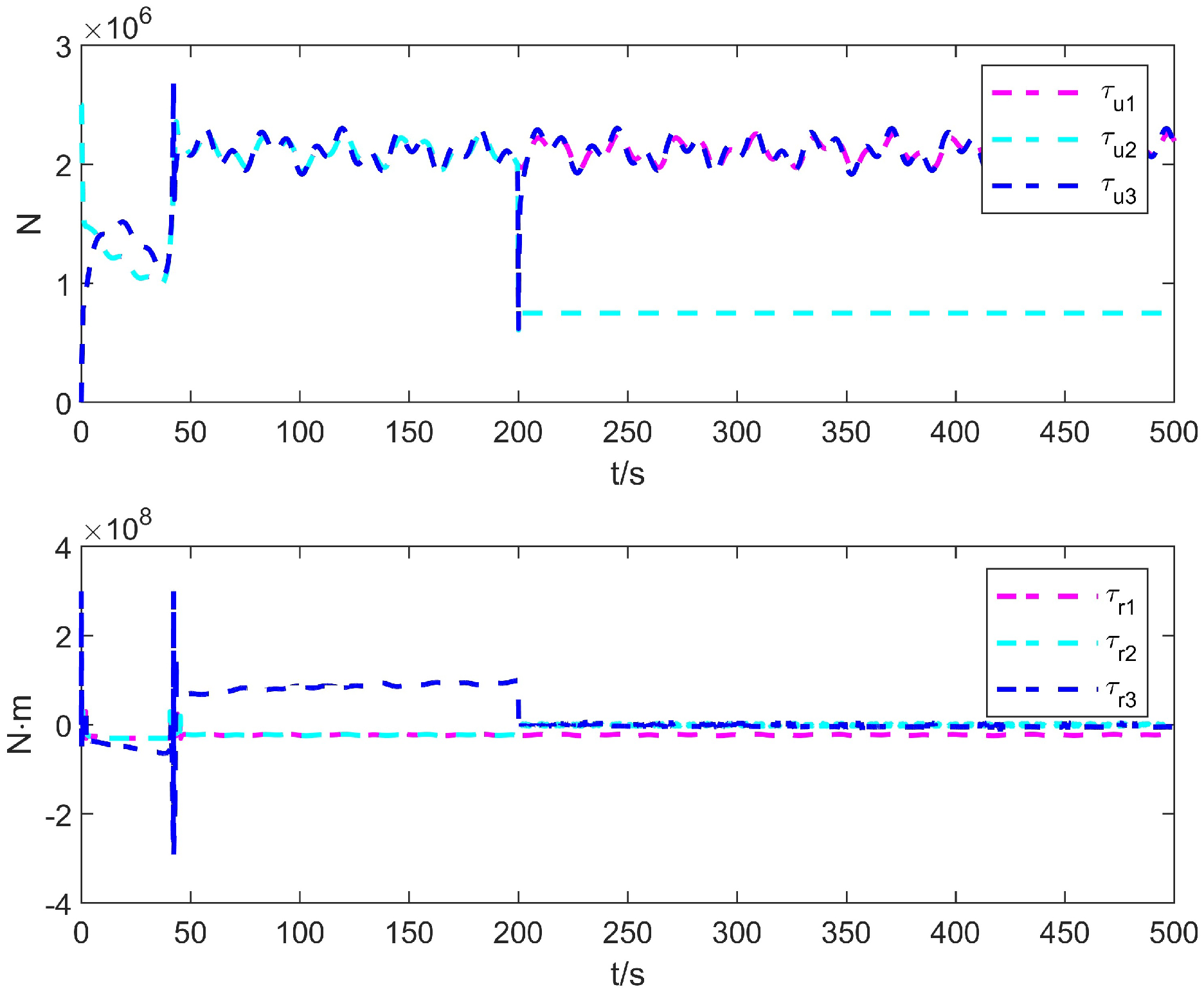
5.1. Control Performance Under Actuator Faults
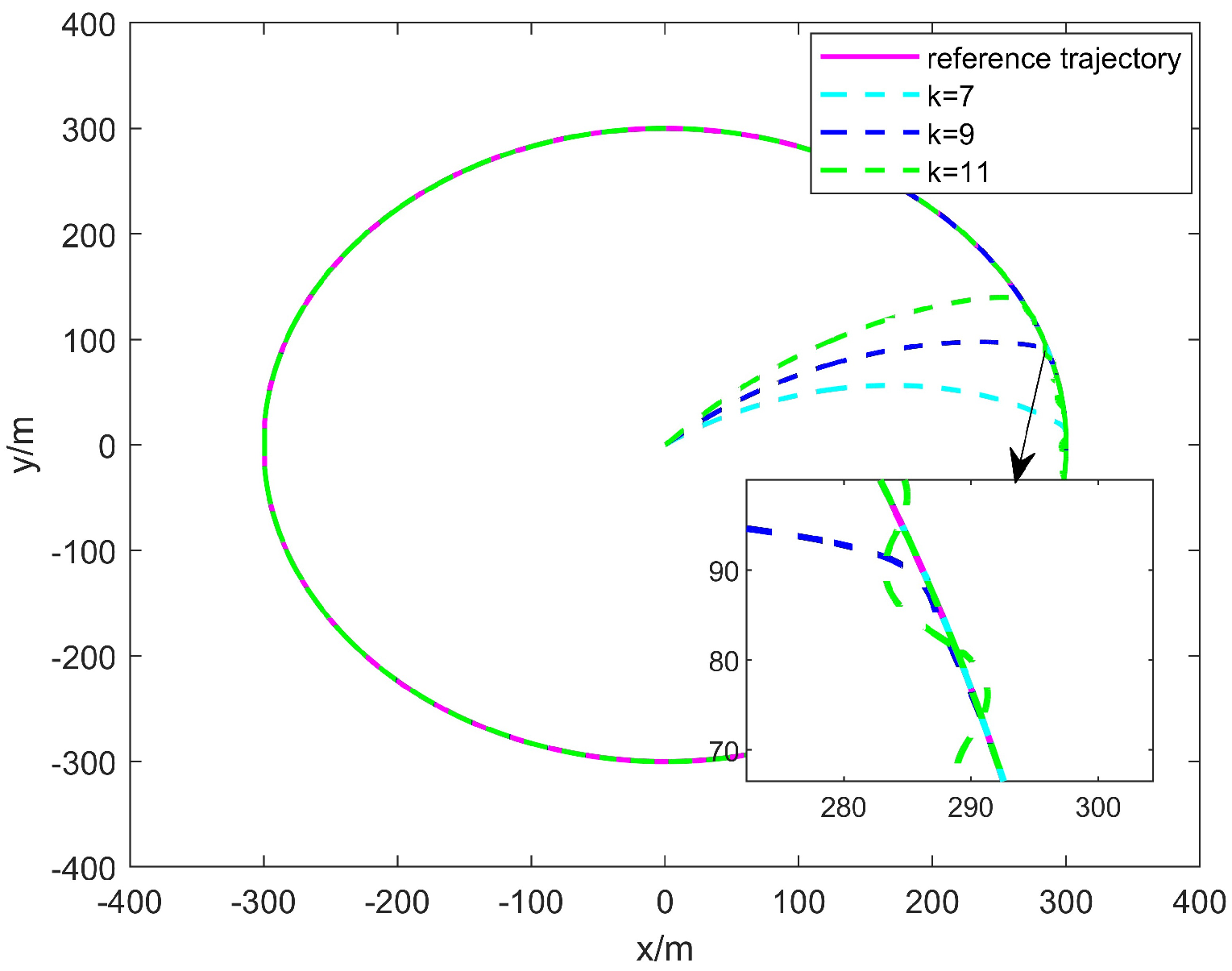
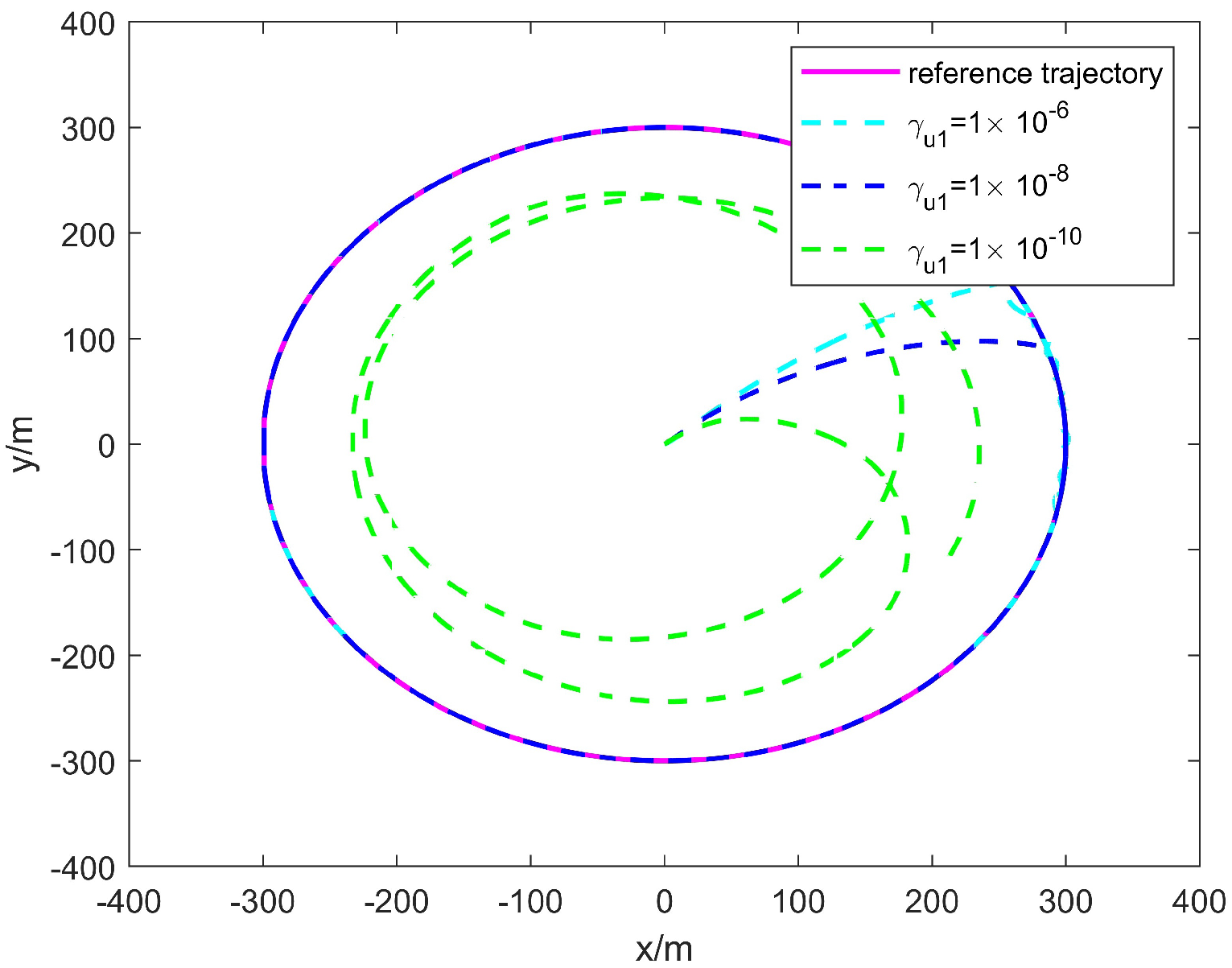
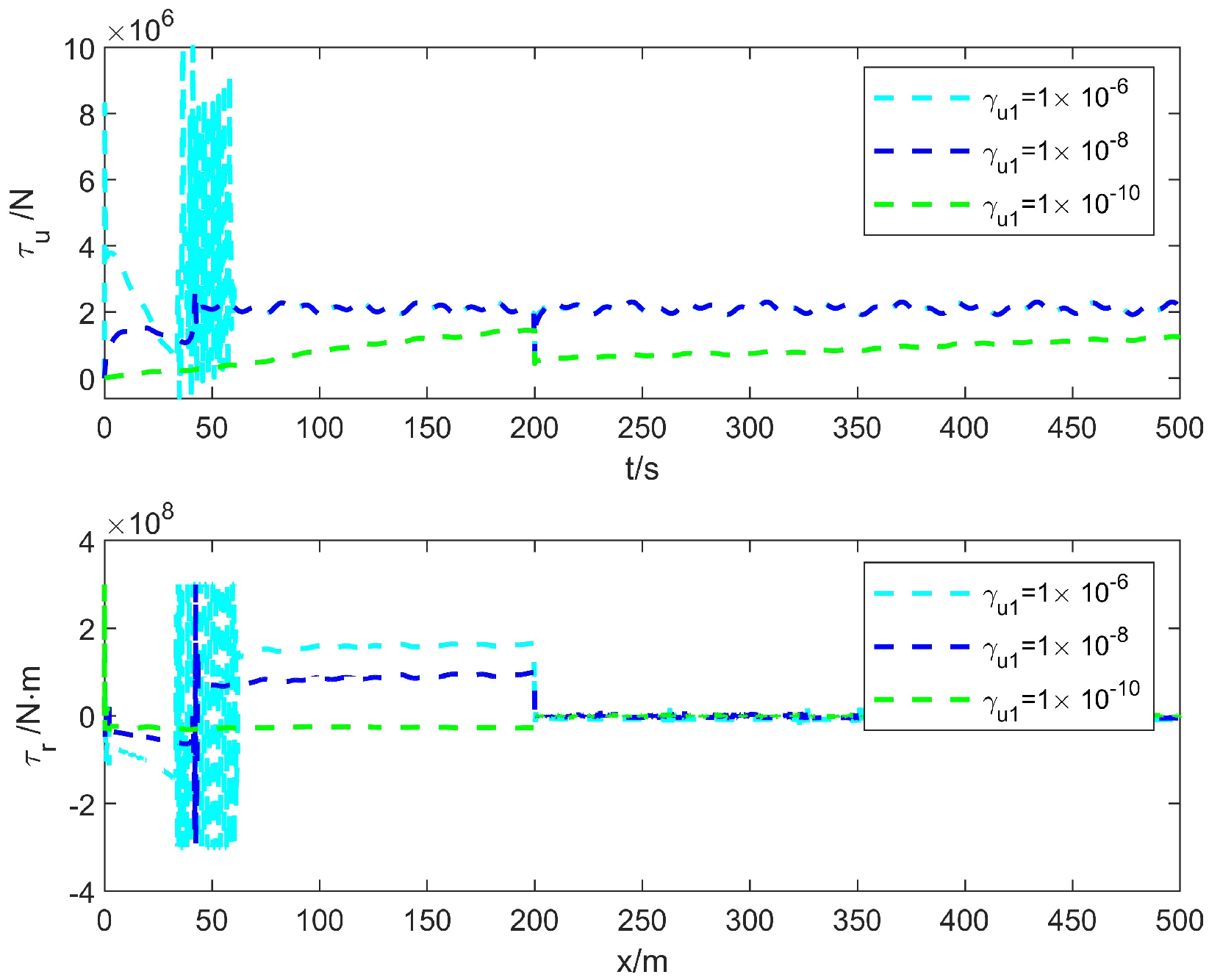
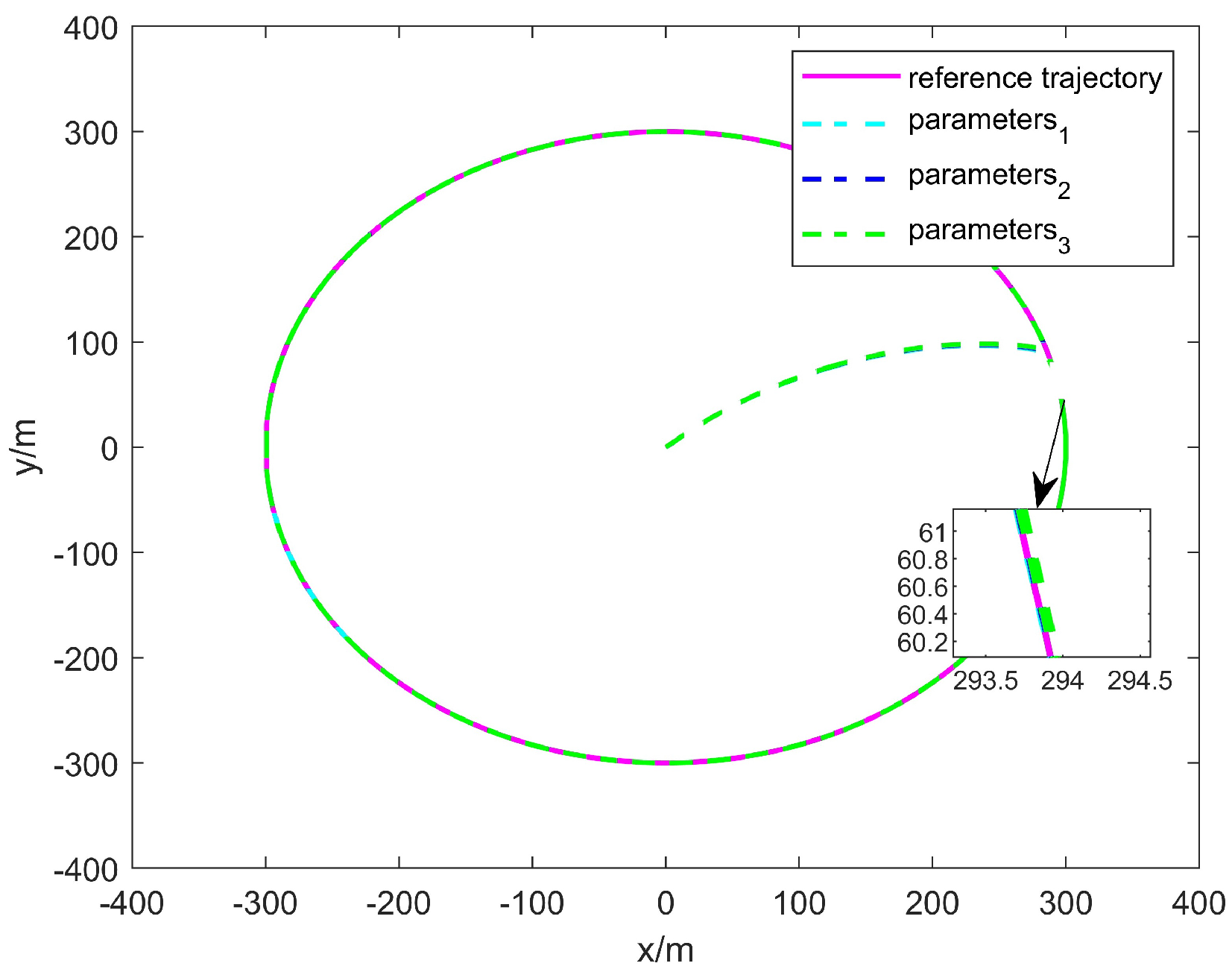
5.2. Impact of Parameters on Control Performance
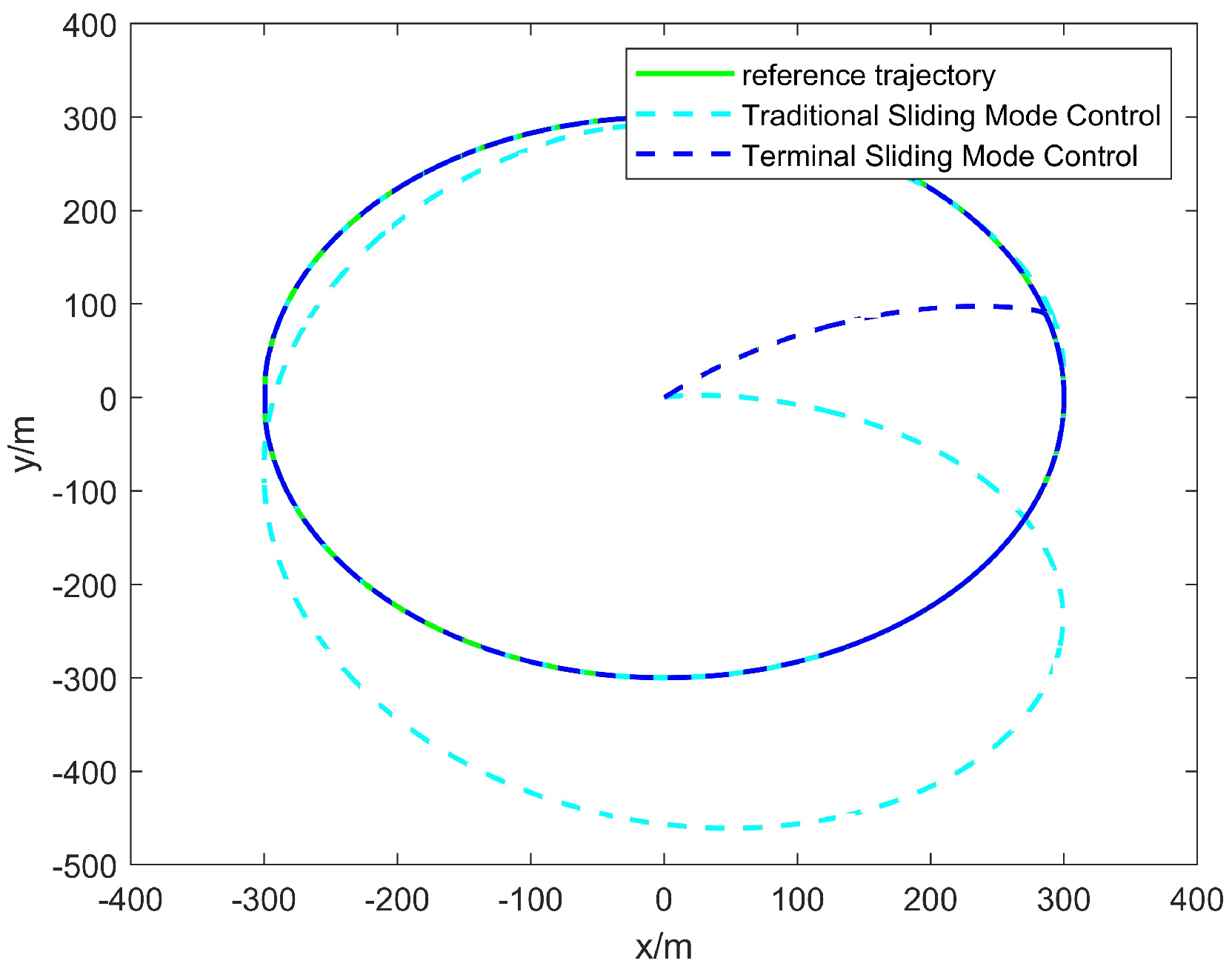
5.3. Comparison with Conventional Sliding Mode Control
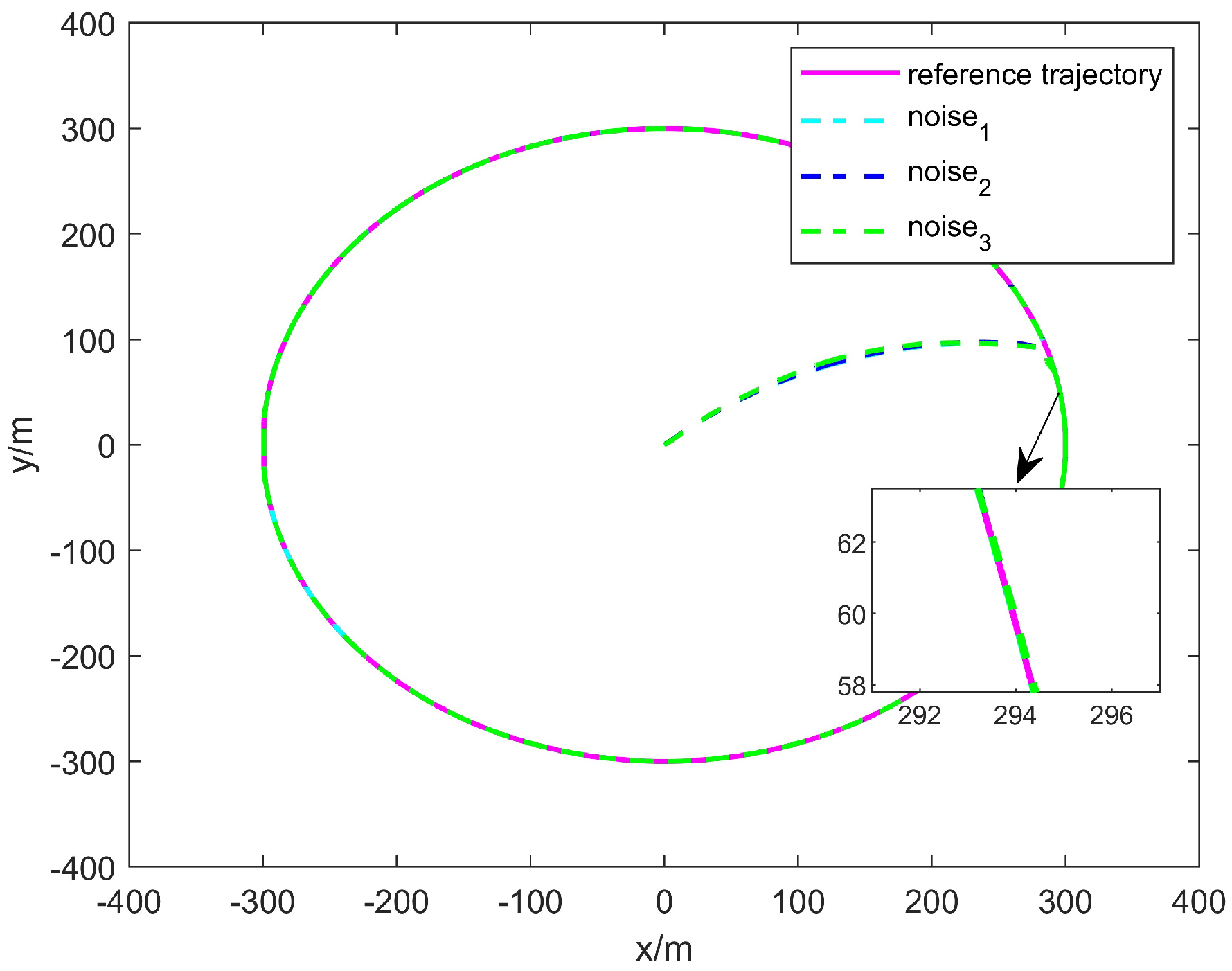
5.4. Robustness
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Li, J.; Zhang, G.; Jiang, C.; Zhang, W. A survey of maritime unmanned search system: Theory, applications and future directions. Ocean Eng. 2023, 285, 115359. [Google Scholar]
- Wang, Y.; Liu, W.; Liu, J.; Sun, C. Cooperative USV–UAV marine search and rescue with visual navigation and reinforcement learning-based control. ISA Trans. 2023, 137, 222–235. [Google Scholar] [PubMed]
- Jiang, X.; Xia, G. Event-Triggered Practical Formation Control of Leaderless Unmanned Surface Vehicles With Environmental Disturbances. IEEE Trans. Circuits Syst. II Express Briefs 2024, 71, 1326–1330. [Google Scholar]
- Lu, N.; Liu, H.; Wang, Y.; Yan, H. A new real-time path planning for USV based on dynamic artificial potential field in complex environments. Int. J. Robust Nonlinear Control. 2024. [Google Scholar] [CrossRef]
- Ning, J.; Wang, Y.; Liu, L.; Li, T. Disturbance observer based adaptive heading control for unmanned marine vehicles with event-triggered and input quantization. Int. J. Robust Nonlinear Control. 2024. [Google Scholar] [CrossRef]
- Fu, M.; Zhang, G.; Xu, Y.; Wang, L.; Dong, L. Discrete-time adaptive predictive sliding mode trajectory tracking control for dynamic positioning ship with input magnitude and rate saturations. Ocean Eng. 2023, 269, 113528. [Google Scholar]
- Zhou, B.; Huang, B.; Su, Y.; Zhu, C. Interleaved Periodic Event-Triggered Communications-Based Distributed Formation Control for Cooperative Unmanned Surface Vessels. IEEE Trans. Neural Netw. Learn. Syst. 2024, 36, 2382–2394. [Google Scholar]
- Peng, H.; Huang, B.; Jin, M.; Zhu, C.; Zhuang, J. Distributed finite-time bearing-based formation control for underactuated surface vessels with Levant differentiator. ISA Trans. 2024, 147, 239–251. [Google Scholar]
- Wang, Z.; Li, Y.; Ma, C.; Yan, X.; Jiang, D. Path-following optimal control of autonomous underwater vehicle based on deep reinforcement learning. Ocean Eng. 2023, 268, 113407. [Google Scholar]
- Xu, Z.; He, S.; Zhou, W.; Li, Y.; Xiang, J. Path Following Control With Sideslip Reduction for Underactuated Unmanned Surface Vehicles. IEEE Trans. Ind. Electron. 2024, 71, 11039–11047. [Google Scholar]
- Wang, S.; Sun, M.; Xu, Y.; Liu, J.; Sun, C. Predictor-Based Fixed-Time LOS Path Following Control of Underactuated USV With Unknown Disturbances. IEEE Trans. Intell. Veh. 2024, 8, 2088–2096. [Google Scholar] [CrossRef]
- Li, J.; Zhu, G.; Lu, J.; Chen, C. FTILOS-based self-triggered adaptive neural path following control for 4DOF underactuated unmanned surface vehicles. Ocean Eng. 2024, 295, 116947. [Google Scholar]
- Liang, H.; Li, H.; Xu, D. Nonlinear Model Predictive Trajectory Tracking Control of Underactuated Marine Vehicles: Theory and Experiment. IEEE Trans. Ind. Electron. 2021, 68, 4238–4248. [Google Scholar]
- Li, Y.; Feng, K.; Li, K. Finite-Time Fuzzy Adaptive Dynamic Event-Triggered Formation Tracking Control for USVs With Actuator Faults and Multiple Constraints. IEEE Trans. Ind. Inform. 2024, 4, 5285–5296. [Google Scholar] [CrossRef]
- Li, K.; Feng, K.; Li, Y. Fuzzy Adaptive Fault-Tolerant Formation Control for USVs With Intermittent Actuator Faults. IEEE Trans. Intell. Veh. 2024, 9, 4445–4455. [Google Scholar] [CrossRef]
- Wrat, G.; Ranjan, P.; Mishra, S.K.; Jose, J.T.; Das, J. Neural network-enhanced internal leakage analysis for efficient fault detection in heavy machinery hydraulic actuator cylinders. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2025, 239, 1021–1031. [Google Scholar] [CrossRef]
- Hao, L.; Wu, Z.; Shen, C.; Cao, Y.; Wang, R. Tube-Based Model Predictive Control for Constrained Unmanned Marine Vehicles With Thruster Faults. IEEE Trans. Intell. Veh. 2024, 20, 4606–4615. [Google Scholar]
- Hao, L.; Zhang, Y.; Shen, C.; Xu, F. Fault-Tolerant Control for Unmanned Marine Vehicles via Quantized Integral Sliding Mode Output Feedback Technique. IEEE Trans. Intell. Transp. Syst. 2023, 24, 5014–5023. [Google Scholar] [CrossRef]
- Yang, X.; Hao, L.; Li, T.; Xiao, Y. Dynamic Positioning Control for Unmanned Marine Vehicles With Thruster Faults and Time Delay: A Lyapunov Matrix-Based Method. IEEE Trans. Syst. Man Cybern. Syst. 2024, 54, 4019–4030. [Google Scholar] [CrossRef]
- Wu, W.; Tong, S. Fixed-time formation fault tolerant control for unmanned surface vehicle systems with intermittent actuator faults. Ocean Eng. 2023, 281, 114813. [Google Scholar] [CrossRef]
- Sun, H.; Shi, J.; Hou, L. Dynamic Event-Triggered Output Feedback Fault-Tolerant Control for Dynamic Positioning of Unmanned Surface Vehicles With Multiple Estimators. IEEE Trans. Veh. Technol. 2024, 73, 3218–3229. [Google Scholar] [CrossRef]
- Liu, Z.; Wang, Y.; Han, Q. Adaptive fault-tolerant trajectory tracking control of twin-propeller non-rudder unmanned surface vehicles. Ocean Eng. 2023, 285, 115294. [Google Scholar] [CrossRef]
- Park, J.; Sandberg, I.W. Universal approximation using radial-basis-function networks. Neural Comput. 1991, 3, 246–257. [Google Scholar] [CrossRef] [PubMed]
- Xu, L.; Yao, B. Adaptive robust control of mechanical systems with non-linear dynamic friction compensation. Int. J. Control. 2008, 81, 167–176. [Google Scholar] [CrossRef]
- Do, K.D.; Jiang, Z.P.; Pan, J. Robust adaptive path following of underactuated ships. Automatica 2004, 6, 929–944. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Fault Model | ||
|---|---|---|
| Normal | ||
| Loss of effectiveness | ||
| Increased bias input | ||
| Both faults occur |
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| c | 9 | k | 5 |
| 2 | 1 | ||
| 5 | 9 | ||
| 1 | 1 | ||
| 5 | 9 | ||
| 10 | 10 | ||
| 1 | 3 | ||
| 1 | |||
| 1 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, W.; Cheng, H.; Chen, Z.; Hua, M. Adaptive Sliding Mode Fault-Tolerant Tracking Control for Underactuated Unmanned Surface Vehicles. J. Mar. Sci. Eng. 2025, 13, 712. https://doi.org/10.3390/jmse13040712
Zhou W, Cheng H, Chen Z, Hua M. Adaptive Sliding Mode Fault-Tolerant Tracking Control for Underactuated Unmanned Surface Vehicles. Journal of Marine Science and Engineering. 2025; 13(4):712. https://doi.org/10.3390/jmse13040712
Chicago/Turabian StyleZhou, Weixiang, Hongying Cheng, Zihao Chen, and Menglong Hua. 2025. "Adaptive Sliding Mode Fault-Tolerant Tracking Control for Underactuated Unmanned Surface Vehicles" Journal of Marine Science and Engineering 13, no. 4: 712. https://doi.org/10.3390/jmse13040712
APA StyleZhou, W., Cheng, H., Chen, Z., & Hua, M. (2025). Adaptive Sliding Mode Fault-Tolerant Tracking Control for Underactuated Unmanned Surface Vehicles. Journal of Marine Science and Engineering, 13(4), 712. https://doi.org/10.3390/jmse13040712