
Detailed Investigation of Cobalt-Rich Crusts in Complex Seamount Terrains Using the Haima ROV: Integrating Optical Imaging, Sampling, and Acoustic Methods

 , , ,
, , ,
Abstract
1. Introduction
2. Materials and Methods
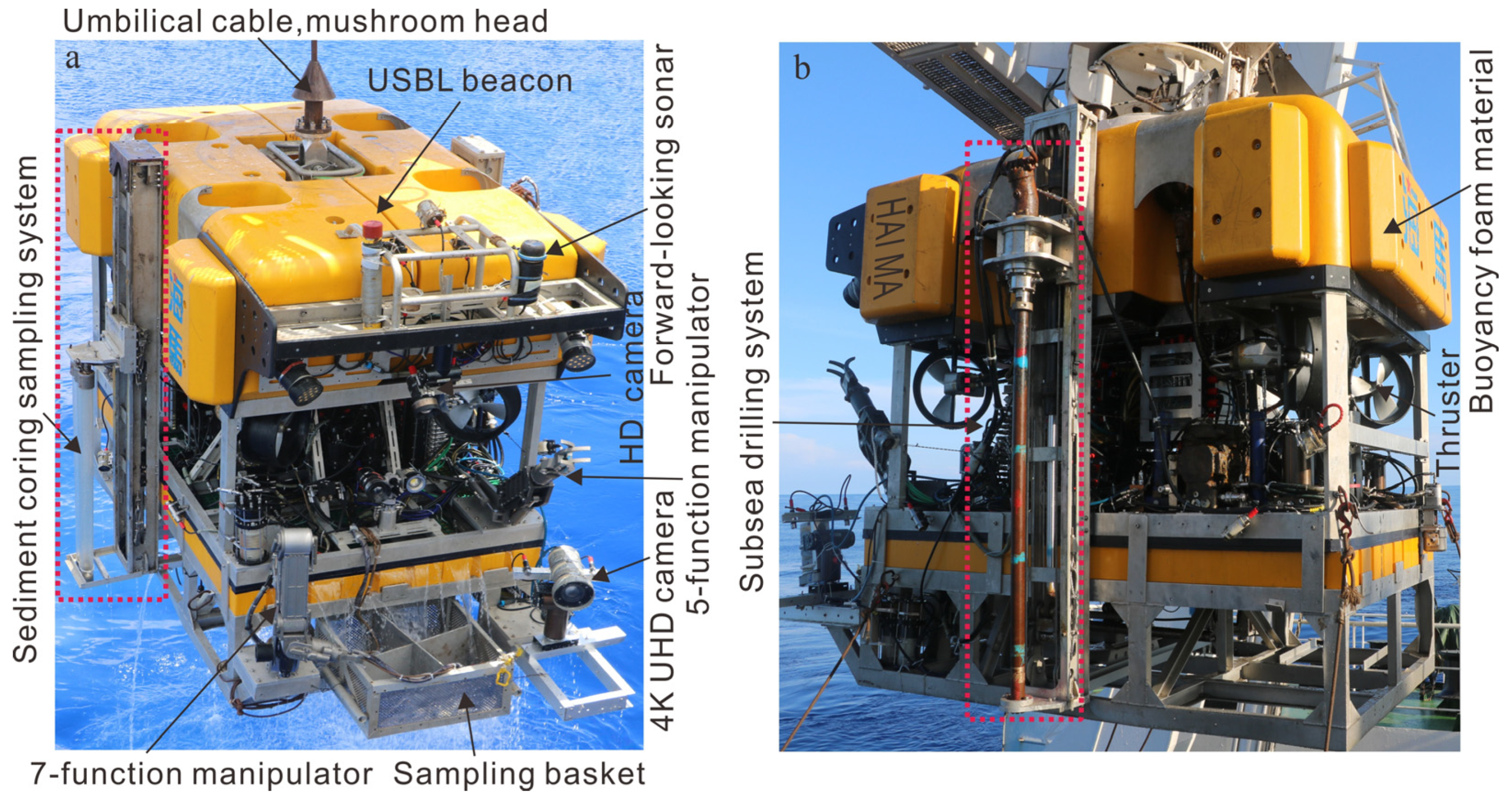
2.1. Survey Equipment
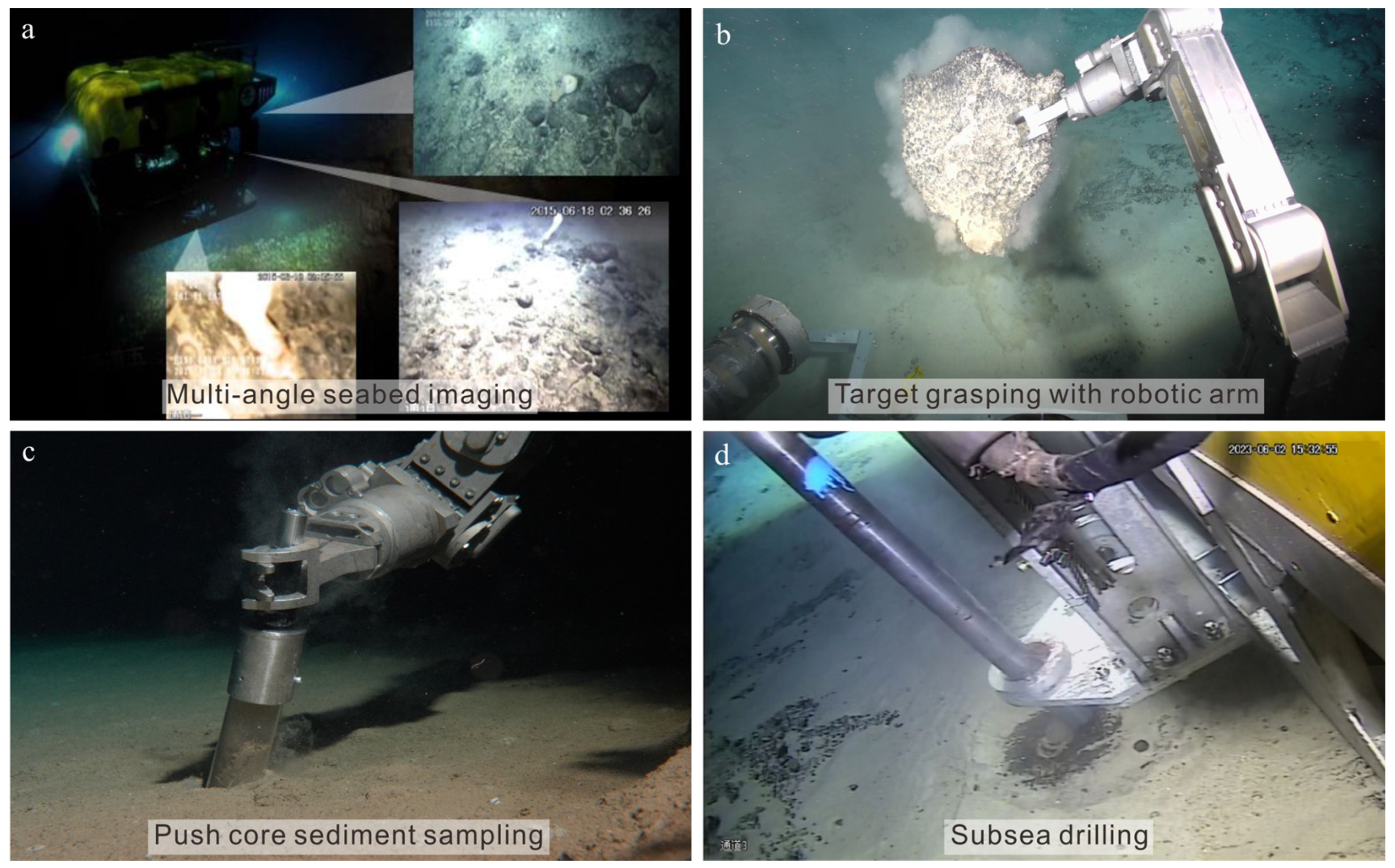
2.2. Detailed Survey Methods
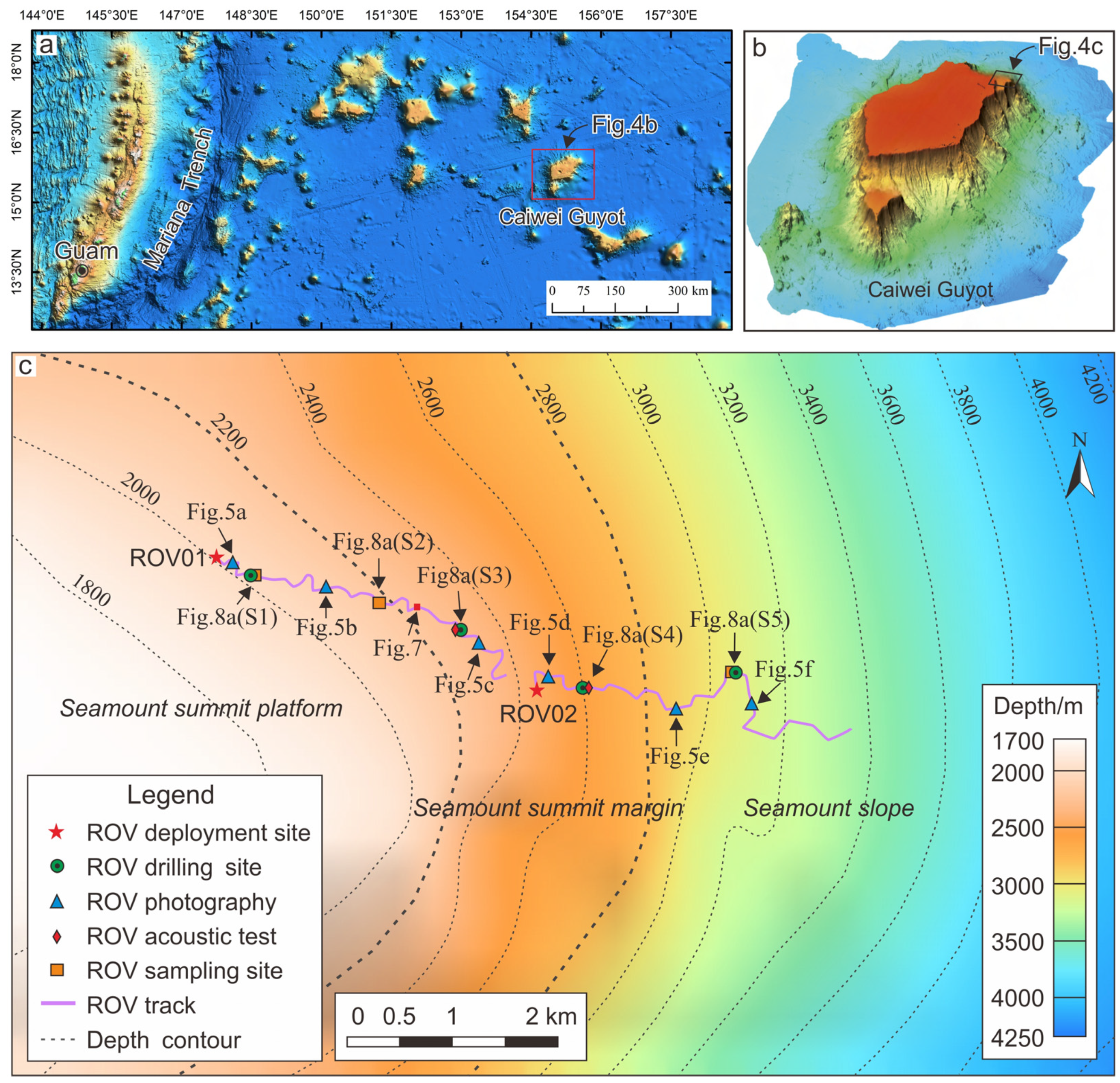
2.3. Data Collection Process in Caiwei Guyot
3. Results
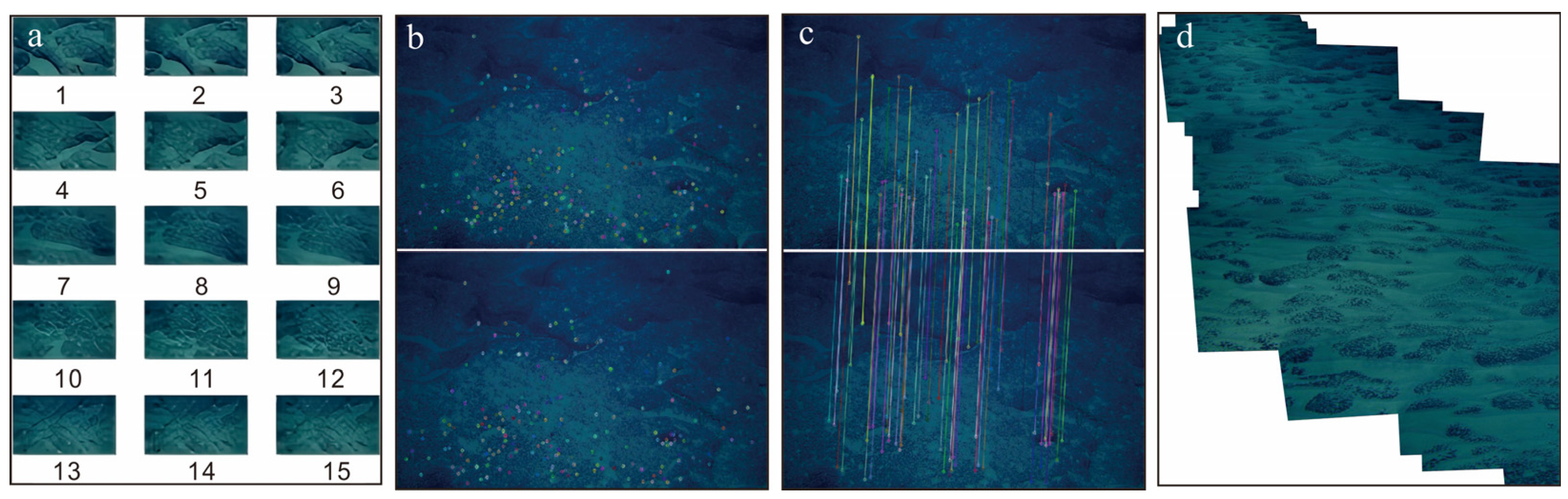
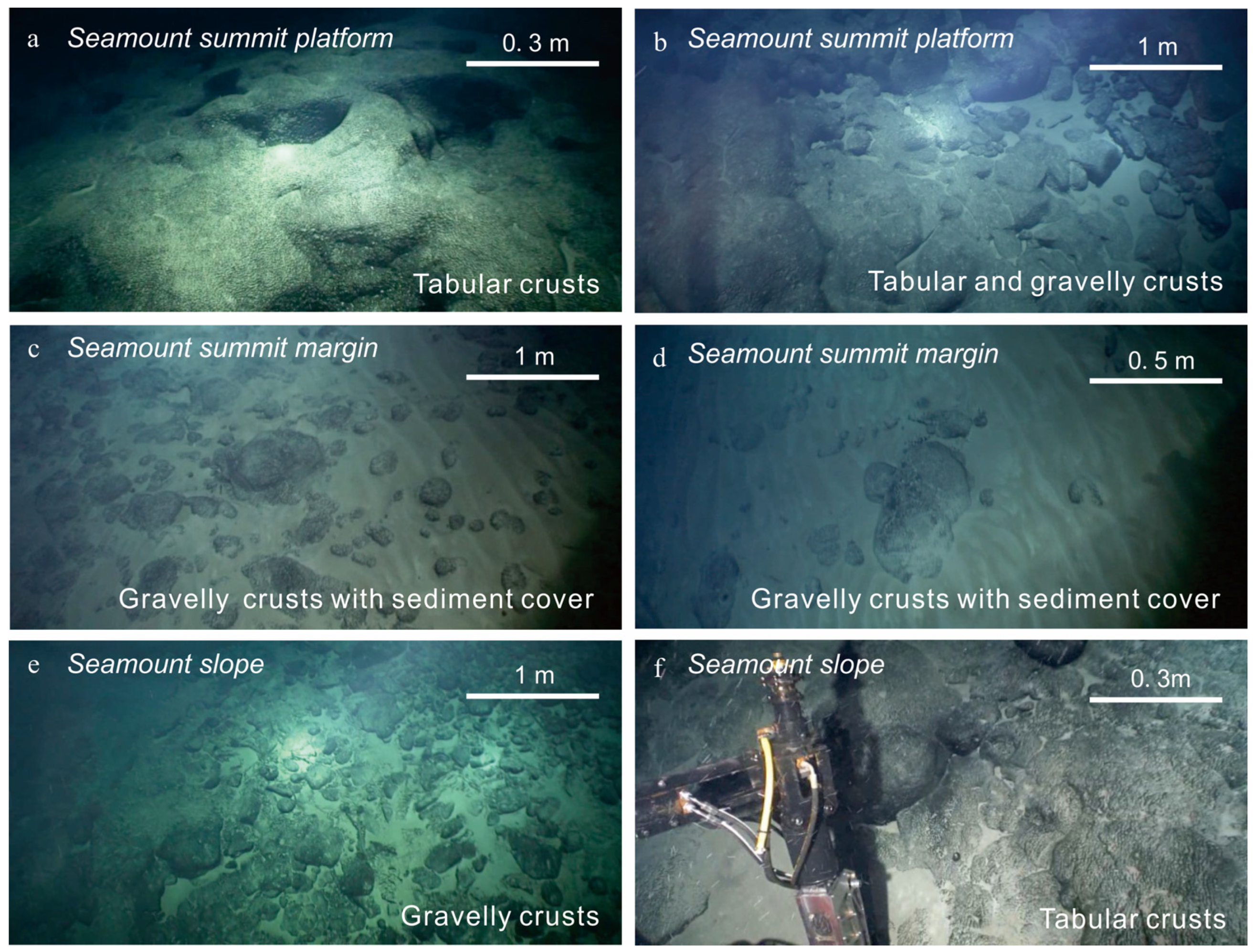
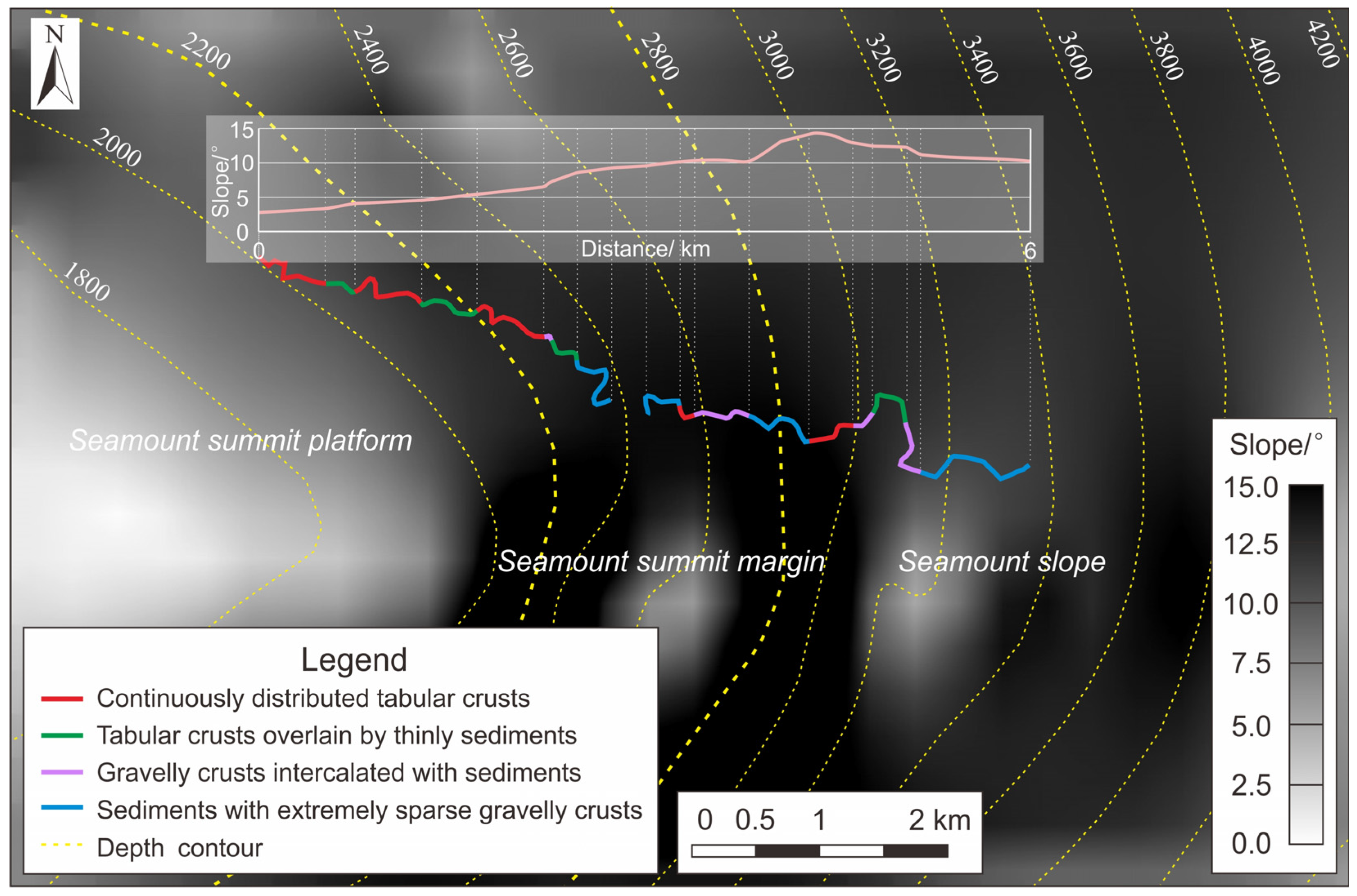
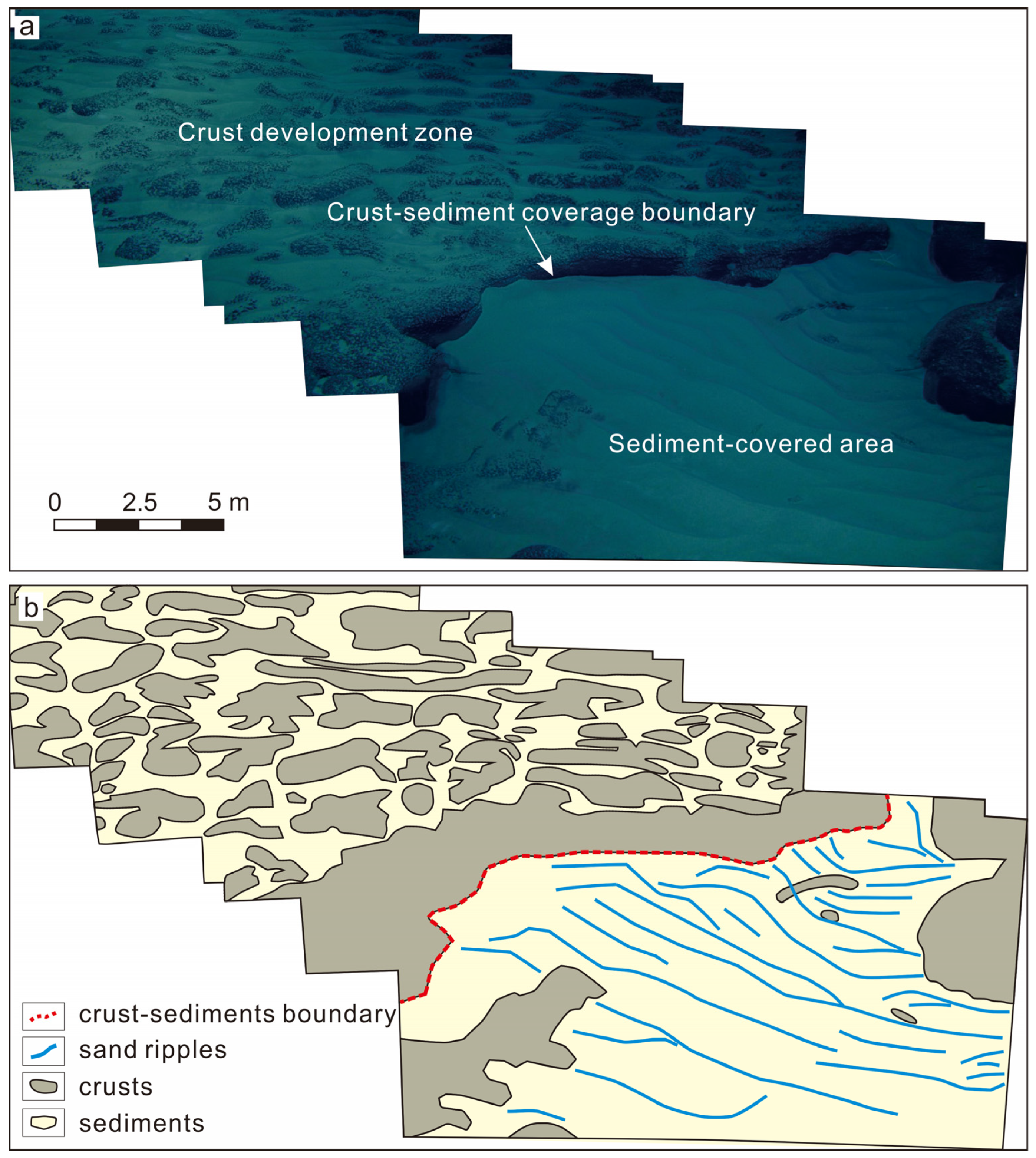
3.1. Optical Imaging: Spatial Distribution of Crusts
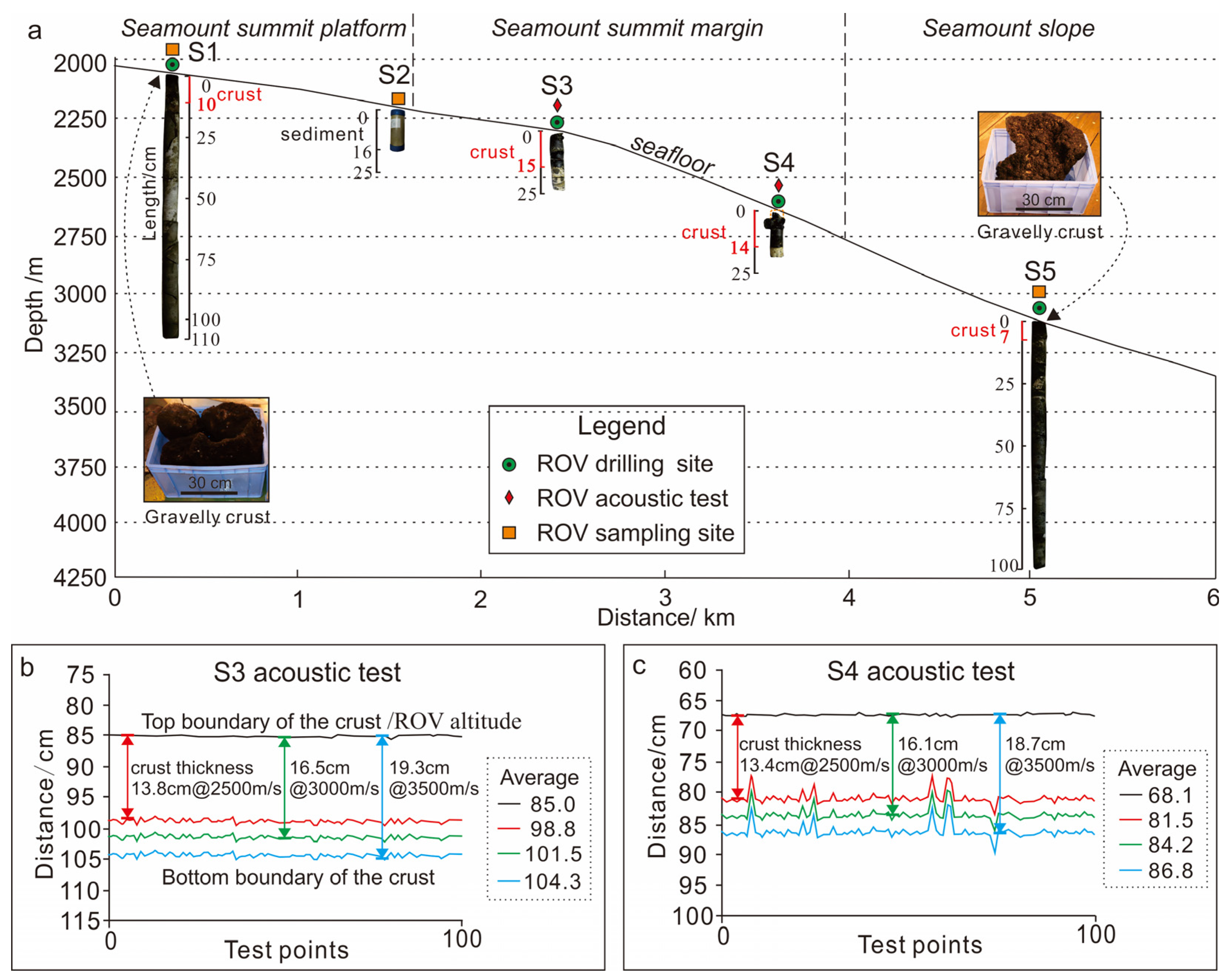
3.2. Sampling and Acoustic Measurements: Crust Thickness and Sample Component
4. Discussion
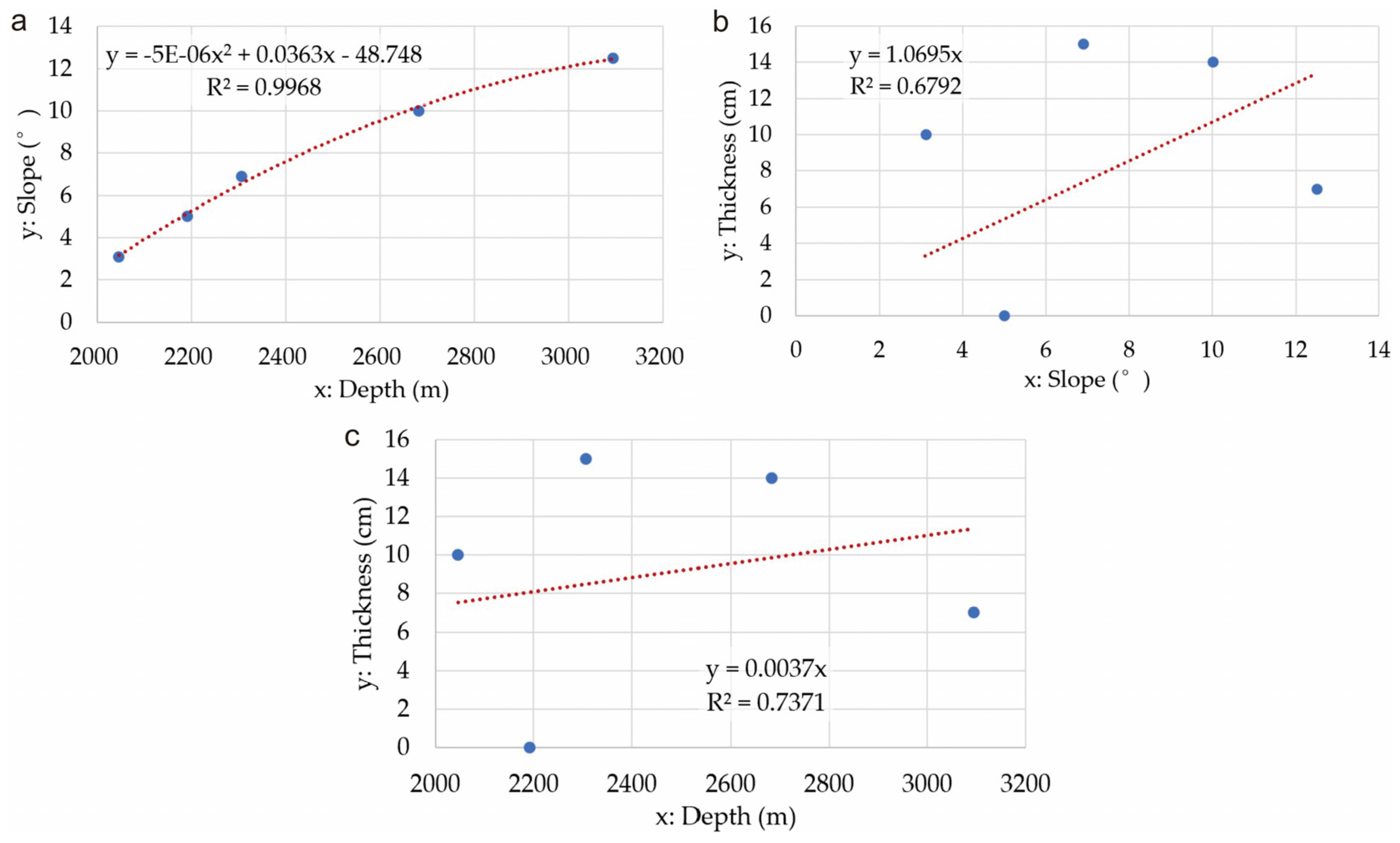
4.1. Analysis of Spatial Distribution and Thickness Characteristics of Crusts in Seamount Complex Terrain
4.2. Characteristics and Advantages of ROV-Based Fine-Scale Surveys in Complex Seamount Terrain
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Friedrich, G.; Schmitz-Wiechowski, A. Mineralogy and chemistry of a ferromanganese crust from a deep-sea hill, central Pacific, “Valdivia” cruise VA 132. Mar. Geol. 1980, 37, 71–90. [Google Scholar] [CrossRef]
- Aplin, A.C.; Cronan, D.S. Ferromanganese oxide deposits from the central Pacific Ocean, I. Encrustations from the Line Islands Archipelago. Geochim. Cosmochim. Acta 1985, 49, 427–436. [Google Scholar] [CrossRef]
- Halbach, P. Processes controlling the heavy metal distribution in Pacific ferromanganese nodules and crusts. Geol. Rundsch. 1986, 75, 235–247. [Google Scholar] [CrossRef]
- Hein, J.R.; Koschinsky, A.; Bau, M.; Manheim, F.T.; Kang, J.K.; Roberts, L. Cobalt-rich ferromanganese crusts in the Pacific. In Handbook of Marine Mineral Deposits; Cronan, D.S., Ed.; CRC Press: Boca Raton, FL, USA, 2000; pp. 239–279. [Google Scholar]
- Ma, W.; Chu, F.; Jin, X. Method approach of resource assessment and ore delineation for the cobalt-rich crust. Acta Oceanol. Sin. 2008, 29, 67–73. [Google Scholar]
- Okamoto, N.; Usui, A. Regional distribution of Co-rich ferromanganese crusts and evolution of the seamounts in the Northwestern Pacific. Mar. Georesour. Geotechnol. 2014, 32, 187–206. [Google Scholar] [CrossRef]
- Hein, J.R.; Mizell, K.; Koschinsky, A.; Conrad, T.A. Deep-ocean mineral deposits as a source of critical metals for high and green technology applications: Comparison with land-based resources. Ore Geol. Rev. 2013, 51, 1–14. [Google Scholar] [CrossRef]
- Hein, J.R.; Koschinsky, A. Deep-ocean ferromanganese crusts and nodules. Treatise Geochem. 2014, 13, 273–291. [Google Scholar]
- Jiao, D.; Jin, X.; Chu, F.; Hu, G.; Wang, Y. Formation conditions and control factors of thick Co-rich ferromanganese crusts. Miner. Deposits 2007, 26, 296–306. [Google Scholar]
- Zhang, F.; Zhang, W.; Ren, X.; Zhang, X.; Zhu, K. Resource estimation of Co-rich crusts of seamounts in the three oceans. Acta Oceanol. Sin. 2015, 37, 88–105. [Google Scholar]
- Halbach, P.E.; Jahn, A.; Cherkashov, G. Marine Co-rich ferromanganese crust deposits: Description and formation, occurrences and distribution, estimated worldwide resources. In Deep-Sea Mining; Sharma, R., Ed.; Springer: Cham, Switzerland, 2017; pp. 65–141. [Google Scholar]
- Usui, A.; Nishi, K.; Sato, H.; Nakasato, Y.; Thornton, B.; Kashiwabara, T.; Tokumaru, A.; Sakumaru, A.; Yamaoka, K.; Kato, S.; et al. The continuous growth of hydrogenetic ferromanganese crusts since 17 Myr ago on Takuyo-Daigo Seamount, NW Pacific, at water depths of 800–5500 m. Ore Geol. Rev. 2017, 87, 71–87. [Google Scholar] [CrossRef]
- Liu, Y.; He, G.; Yao, H.; Yang, Y.; Ren, J.; Guo, L.; Mei, Y. Global distribution characteristics of seafloor cobalt-rich encrustation resources. Miner. Deposits 2013, 32, 1275–1284. [Google Scholar]
- Riemann, F. Biological aspects of deep-sea manganese nodule formation. Oceanol. Acta 1983, 6, 303–311. [Google Scholar]
- Yamazaki, T.; Tsurusaki, K.; Chung, J.S. A gravity coring technique applied to cobalt-rich manganese deposits in the Pacific Ocean. Georesour. Geotechnol. 1996, 14, 315–334. [Google Scholar] [CrossRef]
- Anderson, J.T.; Holliday, D.V.; Kloser, R.; Dave, G.R.; Simard, Y.; Brown, C.J.; Chapman, R.; Coggan, R.; Kieser, R.; Michaels, W.L.; et al. Acoustic seabed classification of marine physical and biological landscapes. ICES Coop. Res. Rep. 2007, 286, 1–6. [Google Scholar]
- Usui, A.; Okamoto, T. Geophysical and geological exploration of cobalt-rich ferromanganese crusts: An attempt of small-scale mapping on a Micronesian seamount. Mar. Georesour. Geotechnol. 2010, 28, 192–206. [Google Scholar]
- Luo, W.; He, S. Application of rock dredge to cobalt-rich crust investigation. Mar. Geol. Front. 2017, 33, 66–70. [Google Scholar] [CrossRef]
- He, Q.; Yuan, B. A preliminary study on detecting the thickness of cobalt-rich crust in the ocean by acoustic wave. Min. Technol. 2003, 3, 93–95. [Google Scholar]
- Jin, X. The development of research in marine geophysics and acoustic technology for submarine exploration. Prog. Geophys. 2007, 22, 1243–1249. [Google Scholar]
- Anderson, J.T.; Van, H.D.; Kloser, R.; Reid, D.G.; Simard, Y. Acoustic seabed classification: Current practice and future directions. ICES J. Mar. Sci. 2008, 65, 1004–1011. [Google Scholar]
- Yu, Q.; He, G.; Yang, Y. Status quo and prospect in acoustic detection technology for submarine cobalt-rich crust exploration. Mar. Geol. Front. 2024, 40, 83–92. [Google Scholar]
- Yeo, I.A.; Howarth, S.A.; Spearman, J.; Cooper, A.; Crossouard, N.; Taylor, J.; Turnbull, M.; Murton, B.J. Distribution of and hydrographic controls on ferromanganese crusts: Tropic Seamount, Atlantic. Ore Geol. Rev. 2019, 114, 103131. [Google Scholar]
- Yang, Y.; He, G.; Liu, Y.; Ma, J.; Wei, Z.; Guo, B. Automated multi-scale classification of the terrain units of the Jiaxie Guyots and their mineral resource characteristics. Acta Oceanol. Sin. 2022, 41, 129–139. [Google Scholar] [CrossRef]
- Johnson, H.P.; Helferty, M. The geological interpretation of side-scan sonar. Rev. Geophys. 1990, 28, 357–380. [Google Scholar]
- Atallah, L.; Smith, P.P. Automatic seabed classification by the analysis of side-scan sonar and bathymetric imagery. IEEE Proc. Radar Sonar Navig. 2004, 151, 327–336. [Google Scholar] [CrossRef]
- Lee, T.G.; Hein, J.R.; Lee, K.; Moon, J.W.; Ko, Y.T. Sub-seafloor acoustic characterization of seamounts near the Ogasawara Fracture Zone in the Western Pacific using chirp (3-7 kHz) sub-bottom profiles. Deep Sea Res. Part I 2005, 52, 1932–1956. [Google Scholar]
- He, G.; Liang, D.; Song, C.; Wu, S.; Zhou, J.; Zhang, X. Determining the distribution boundary of cobalt-rich crusts of Guyot by synchronous application of sub-bottom profiling and deep-sea video recording. Earth Sci. J. China Univ. Geosci. 2005, 30, 509–512. [Google Scholar]
- Li, S.; Tao, C.; Chu, F.; Wu, Z. A practical application of sub-bottom profile system to cobalt-rich crust investigation in middle Pacific Ocean. Ocean Technol. 2007, 26, 54–57. [Google Scholar]
- Mel’nikov, M.E.; Tugolesov, D.D.; Pletnev, S.P. The structure of the incoherent sediments in the Ita Mai Tai Guyot (Pacific Ocean) is based on acoustic profiling data. Oceanology 2010, 50, 582–590. [Google Scholar]
- Liu, Y.; Yao, H.; Deng, X. Application of the Jiaolong HOV to the seamount ferromanganese crust resource exploration. Geol. Rev. 2017, 63 (Suppl. S1), 231–232. [Google Scholar]
- Tian, L.; Sheng, Y. The Hai Ma ROV rich cobalt crust drilling technology research. Mech. Electr. Eng. Technol. 2015, 44, 13–15. [Google Scholar]
- Liu, G.; Wei, Z.; Lu, M.; Lu, Q.; Deng, D. Development of deep-sea shallow sampling drill on board ROV. In Proceedings of the 20th National Exploration Engineering (Geotechnical Drilling Engineering) Academic Exchange Conference, Geological Society of China, Beijing, China, 11–15 October 2019; pp. 343–347. [Google Scholar]
- Thornton, B.; Asada, A.; Ura, T.; Ohira, K.; Kirimura, D. The development of an acoustic probe to measure the thickness of ferromanganese crusts. In Proceedings of the Oceans 2010 IEEE, Sydney, NSW, Australia, 24–27 May 2010; pp. 1–9. [Google Scholar]
- Thornton, B.; Asada, A.; Bodenmann, A.; Sato, T.; Ura, T. Instruments and methods for acoustic and visual survey of manganese crusts. IEEE J. Ocean. Eng. 2013, 38, 86–203. [Google Scholar]
- Neettiyath, U.; Thornton, B.; Sugimatsu, H.; Sunaga, T.; Sakamoto, J.; Hino, H. Automatic detection of buried Mn-crust layers using a sub-bottom acoustic probe from AUV based surveys. In Proceedings of the Oceans 2022-Chennai, Chennai, India, 21–24 February 2022; pp. 1–7. [Google Scholar]
- Neettiyath, U.; Thornton, B.; Sangekar, M.; Ishii, K.; Sato, T.; Bodenmann, A. Automatic extraction of thickness information from sub-surface acoustic measurements of manganese crusts. In Proceedings of the OCEANS 2017-Aberdeen, Aberdeen, UK, 19–22 June 2017; pp. 1–7. [Google Scholar]
- Hong, F.; Feng, H.; Huang, M.; Wang, B.; Xia, J. China’s first demonstration of cobalt-rich manganese crust thickness measurement in the Western Pacific with a parametric acoustic probe. Sensors 2019, 19, 4300. [Google Scholar] [CrossRef]
- Feng, H.; Ren, X.; Huang, M.; Yang, Z. Key techniques of parametric array sonar for detecting the thickness of cobalt-rich crusts in deep sea. Technol. Acoust. 2020, 39, 267–271. [Google Scholar]
- Lian, L.; Ma, X.; Tao, J. Development history of 4500 m class “Haima” ROV. Nav. Archit. Ocean Eng. 2015, 31, 9–12. [Google Scholar]
- Chen, Z.; Tian, L.; Hu, B.; Chen, C.; Zhang, X.; Sheng, Y.; Tao, J. Application of “Haima” ROV in gas hydrate exploration. J. Ocean Technol. 2018, 37, 24–29. [Google Scholar]
- Tao, J.; Chen, Z.H. Development and application of HAIMA (ROV). J. Eng. Stud. 2016, 8, 185–191. [Google Scholar]
- Tian, L.; Sun, Y.; Zhang, Y. Motion control research based on ROV “Haima” sea trial. Mech. Electr. Inf. 2017, 6, 52–55. [Google Scholar]
- Johnson-Roberson, M.; Pizarro, O.; Williams, S.B.; Mahon, I. Generation and visualization of large-scale three-dimensional reconstructions from underwater robotic surveys. J. Field Robot. 2010, 27, 21–51. [Google Scholar]
- Zhang, X. Application of crust and shell acoustic thickness gauge in the exploration of oceanic cobalt-rich crusts resources. Mech. Electr. Eng. Technol. 2018, 47, 157–159. [Google Scholar]
- Zhang, H.; Yao, H.; Yang, Y.; Zhang, H. Origin of multiple flat tables on Caiwei Guyots in West Pacific. Mar. Geol. Quat. Geol. 2018, 38, 91–97. [Google Scholar]
- He, G.; Wang, H.; Ren, J.; Yang, Y.; Wang, F.; Zhang, L.; Deng, X.; Liu, S.; Zhao, B.; Lu, L.; et al. Research on the metallogenic mechanism of deep sea sedimentary mineral resources: Review and outlook. Acta Geol. Sin. 2024, 98, 3202–3212. [Google Scholar]
- He, G.; Yang, Y.; Wei, Z.; Yang, S.; Liu, Y.; Deng, X.; Yao, H.; Deng, Y.; Gao, J.; Fang, N.; et al. Mineral deposit characteristics of cobalt-rich Fe-Mn crusts in COMRA contract area, Western Pacific Ocean. Chin. J. Nonferrous Met. 2021, 31, 2649–2664. [Google Scholar]
- Anokhin, V.M.; Mel’nikov, M.E. Structural features of the northeastern slope of Govorov Guyot, Magellan Seamounts, Pacific Ocean. Russ. J. Pac. Geol. 2010, 4, 304–313. [Google Scholar]
- Ding, Z.; Pan, W.; Lin, Y. Research on simulating cobalt-rich crust in the ocean by high frequency acoustic waves. J. Ocean Technol. 2018, 37, 23–27. [Google Scholar]
- Pan, W.; Ding, Z.; Fan, C. Ultrasonic thickness measurement of ocean cobalt-rich crusts. Nondestr. Test. 2018, 40, 31–34. [Google Scholar]
- He, G. Preliminary fractal analysis of cobalt-rich crust distribution. Mar. Geol. Quat. Geol. 2001, 21, 89–92. [Google Scholar]
- Hein, J.R. Cobalt-rich ferromanganese crusts: Global distribution, composition, origin and research activities. In Minerals Other than Polymetallic Nodules of the International Seabed Area; International Seabed Authority: Kingston, Jamaica, 2004; pp. 188–256. [Google Scholar]
- Cheng, Y.; Jiang, X.; Song, S. Delineation of cobalt crust blocks and estimation of Co-rich crust resource of Govorov Guyot, Magellan Seamounts, Pacific Ocean. J. Jilin Univ. Earth Sci. Ed. 2015, 45, 1642–1656. [Google Scholar]
- Ma, W.; Yang, K.; Bao, G.; Zhang, K.; Dong, R.; Chu, F. Spatial distribution study of cobalt-rich crusts ore formation on the central Pacific seamount. Acta Oceanol. Sin. 2014, 36, 77–89. [Google Scholar] [CrossRef]
- Yamazaki, T.; Sharma, R. Morphological features of Co-rich manganese deposits and their relation to seabed slopes. Mar. Georesour. Geotechnol. 2000, 18, 43–76. [Google Scholar]
- Zhang, H.; Hu, J.; Zhao, J.; Han, Z.; Yu, P.; Wu, G.; Lei, J.; Lu, B.; Pulyaeva, I.A. Variations of calcareous nannofossils of cobalt-rich crusts and geological records at the Eocene-Oligocene transition in western Pacific seamounts. Sci. China Earth Sci. 2015, 58, 784–794. [Google Scholar] [CrossRef]
- Gao, J.; Liu, J.; Zhang, H.; Yan, S.; Wang, H. Geochemistry and source of platinum group elements in cobalt-rich crusts from Caiwei Seamounts in the western Pacific. Haiyang Xuebao 2023, 45, 82–94. [Google Scholar]
- Cao, J.; Liu, X.; Zhang, F.; Li, Q.; Zhang, D.; Wang, H. Application of DTA-6000 acoustic deep-tow system to cobalt-rich crust investigation. Mar. Geol. Quat. Geol. 2016, 36, 173–181. [Google Scholar]
- Xu, J.; Zheng, Y.; Bao, G.; Wu, X.; Zhang, K.; Jin, X. Research of seamount micro-topography based on acoustic deep-tow system investigation: A case from the Marcus-Wake Ridge area. J. Mar. Sci. 2011, 29, 17–24. [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Category | Specifications and Performance |
|---|---|
| Dimensions, Weight, Power |
|
| Underwater Lighting |
|
| Auxiliary Sensors |
|
| Underwater Cameras |
|
| Manipulation System and Chassis |
|
| Drilling System |
|
| Acoustic Detection System | Acoustic crust thickness gauge (1 set): Nonlinear parametric array (primary frequency: 1 MHz, difference frequency: 100 kHz) |
| Site | Crust Thickness (cm) | Acoustic Crust Thickness (cm) | Min. RE | Slope (°) | Depth (m) | ||
|---|---|---|---|---|---|---|---|
| Velocity: 2500 m/s | Velocity: 3000 m/s | Velocity: 3500 m/s | |||||
| S1 | 10.0 | / | / | / | / | 3.1 | 2046.3 |
| S2 | 0 | / | / | / | / | 5.0 | 2192.1 |
| S3 | 15.0 | 13.8 | 16.5 | 19.3 | 8.0% | 6.9 | 2307.0 |
| S4 | 14.0 | 13.4 | 16.1 | 18.7 | 4.3% | 10.0 | 2682.8 |
| S5 | 7.0 | / | / | / | / | 12.5 | 3095.0 |
| Platform | Operational Mode | Advantages | Limitations |
|---|---|---|---|
| ROV | Tethered, free navigation, bottom landing | Extended operational duration (>12 h), high power capacity, superior modular expandability, high maneuverability in localized areas, real-time data transmission; capable of deploying heavy drilling rigs | High dependency on support vessels, limited operational depth range, constrained survey coverage (expanded via vessel mobility) |
| HOV | Untethered, free navigation, bottom landing | Exceptional maneuverability, full ocean depth capability, real-time human-in-the-loop control | Limited mission duration (8–12 h), restricted survey coverage, elevated personnel safety risks, insufficient power capacity for heavy drilling equipment |
| AUV | Untethered, autonomous navigation | High maneuverability, operational stability, support for swarm collaboration, low dependency on support vessels | Short mission duration (hours to days), frequent recovery requirements, delayed data retrieval; limited to acoustic/optical/chemical sensors, incapable of heavy equipment deployment |
| DTS | Tethered, towed navigation | Most extended operational duration, real-time data transmission, centimeter-level positioning accuracy | Poor maneuverability (large turning radius), sensitivity to platform dynamics; restricted to acoustic/optical/chemical sensors, incapable of heavy equipment deployment |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Y.; Yao, H.; Chen, Z.; Wang, L.; Zhou, H.; Zhang, S.; Zhao, B. Detailed Investigation of Cobalt-Rich Crusts in Complex Seamount Terrains Using the Haima ROV: Integrating Optical Imaging, Sampling, and Acoustic Methods. J. Mar. Sci. Eng. 2025, 13, 702. https://doi.org/10.3390/jmse13040702
Li Y, Yao H, Chen Z, Wang L, Zhou H, Zhang S, Zhao B. Detailed Investigation of Cobalt-Rich Crusts in Complex Seamount Terrains Using the Haima ROV: Integrating Optical Imaging, Sampling, and Acoustic Methods. Journal of Marine Science and Engineering. 2025; 13(4):702. https://doi.org/10.3390/jmse13040702
Chicago/Turabian StyleLi, Yonghang, Huiqiang Yao, Zongheng Chen, Lixing Wang, Haoyi Zhou, Shi Zhang, and Bin Zhao. 2025. "Detailed Investigation of Cobalt-Rich Crusts in Complex Seamount Terrains Using the Haima ROV: Integrating Optical Imaging, Sampling, and Acoustic Methods" Journal of Marine Science and Engineering 13, no. 4: 702. https://doi.org/10.3390/jmse13040702
APA StyleLi, Y., Yao, H., Chen, Z., Wang, L., Zhou, H., Zhang, S., & Zhao, B. (2025). Detailed Investigation of Cobalt-Rich Crusts in Complex Seamount Terrains Using the Haima ROV: Integrating Optical Imaging, Sampling, and Acoustic Methods. Journal of Marine Science and Engineering, 13(4), 702. https://doi.org/10.3390/jmse13040702