
A Multi-Resolution Sequence Method with Strong Constraints for Marine Gravity Matching Navigation


Abstract
1. Introduction
- TERCOM estimates underwater vehicle trajectories through correlation analysis between gravity measurement sequences and reference maps. While demonstrating high accuracy and robustness to initial position errors, it exhibits sensitivity to heading deviations. To address the trajectory shape constraints in conventional TERCOM, Wu et al. [19] proposed a Relative Positions-Constrained Pattern Matching (RPCM) method. Han et al. [20] reduced computational burden through algorithmic refinements, while Li and Zhao et al. enhanced computational efficiency via a Novel Hierarchical Neighborhood Threshold Search [21], Soft-Margin Local Semicircular Domain Research Model [22], and Domain-Center Adaptive-Transfer Matching Method (DAMM) [23].
- The ICCP obtains optimal trajectory transformations through iterative objective function minimization, offering high precision but sensitivity to the initial position errors. Liu et al. [24] developed a real-time ICCP algorithm with an Optimized Matching Sequence Length (OMSL-ICCP). By employing a golden section search for sequence length optimization and a Hausdorff distance-based contour point search range determination, this method addresses the limitations of existing real-time ICCP implementations. Wang et al. [25] improved underwater vehicle matching accuracy through a Sliding Window ICCP-based Filtered Marine Map Matching method. Zhang et al. [26] proposed an enhanced ICCP algorithm resolving mismatch issues under large initial position errors, validated through simulations and field tests across flat and rugged terrains.
- Common variants include the Correlation Method (COR), Mean Absolute Differences (MAD), and Mean Square Differences (MSD). Xie et al. [27] employed Taylor’s first-order expansion to establish geomagnetic information relationships between matching and reference points, adopting the MSD for optimal trajectory identification. Gao et al. [28] integrated the MSD with Extended Kalman Filter algorithms to mitigate the initial position error impacts through novel observation equations.
2. Optimized TERCOM and ICCP Algorithm
2.1. TERCOM
2.2. ICCP
- or , where and are thresholds set in advance;
- The increments and of and between two neighboring iterations are less than the set thresholds and ;
- The distance between the estimated track points obtained from two adjacent iterations is less than the set threshold ;
- The number of iterations reaches a set maximum value .
3. mRSMSC Model for Marine Gravity Matching
3.1. Multi-Resolution Sequence-Matching Fusion Algorithm
3.2. Analysis and Modeling of Strong Constraints
3.2.1. Positional Correlation Constraint
3.2.2. Heading Correlation Constraint
3.2.3. Gravity Correlation Constraint
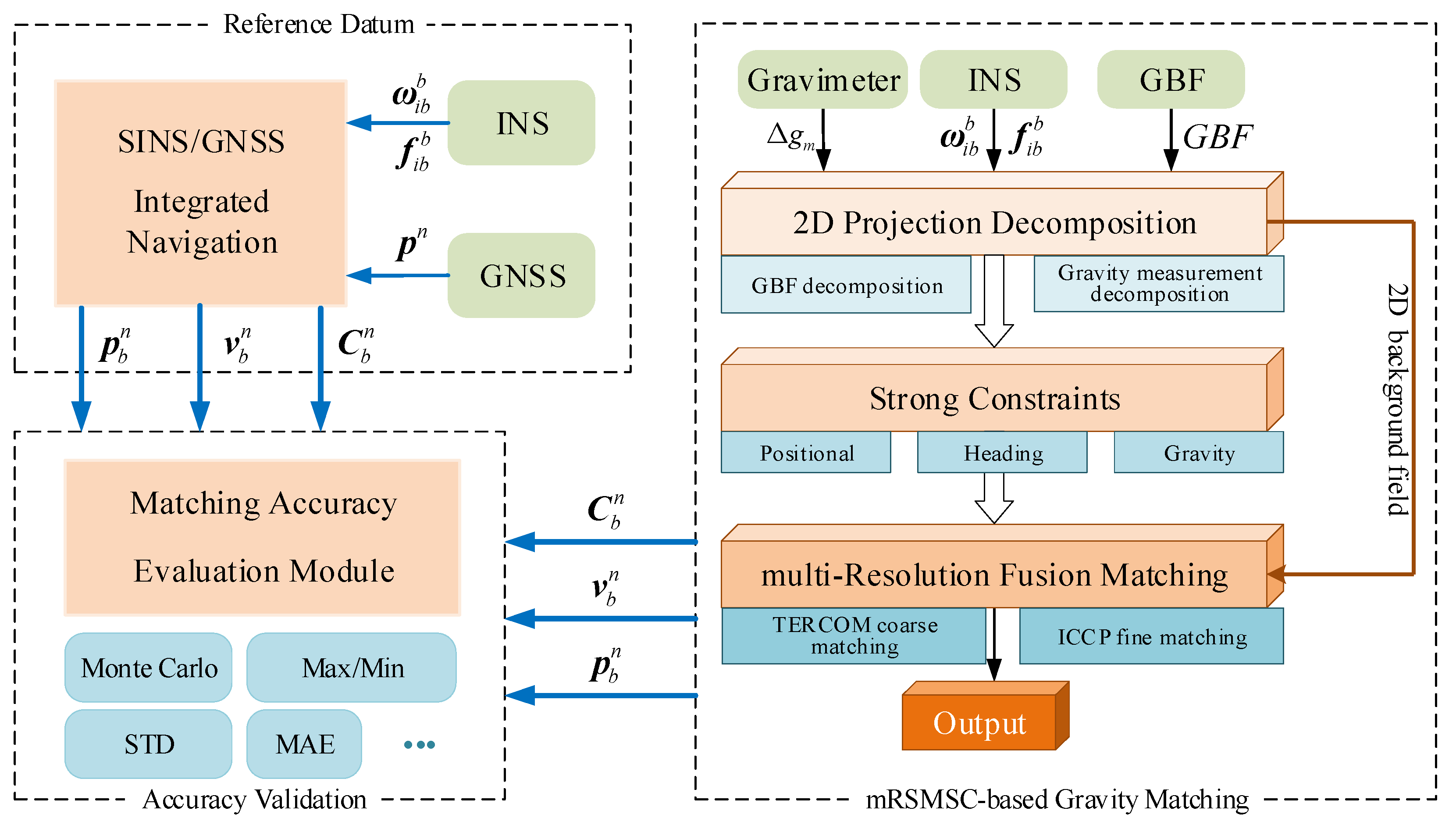
3.3. Algorithm Flow
- Reference Datum: Provided by SINS/GNSS integrated navigation;
- Matching Positioning: Executes mRSMSC-based gravity matching;
- Accuracy Validation: Evaluates reliability by comparing the mRSMSC outputs with SINS/GNSS references.
4. Experimental Study
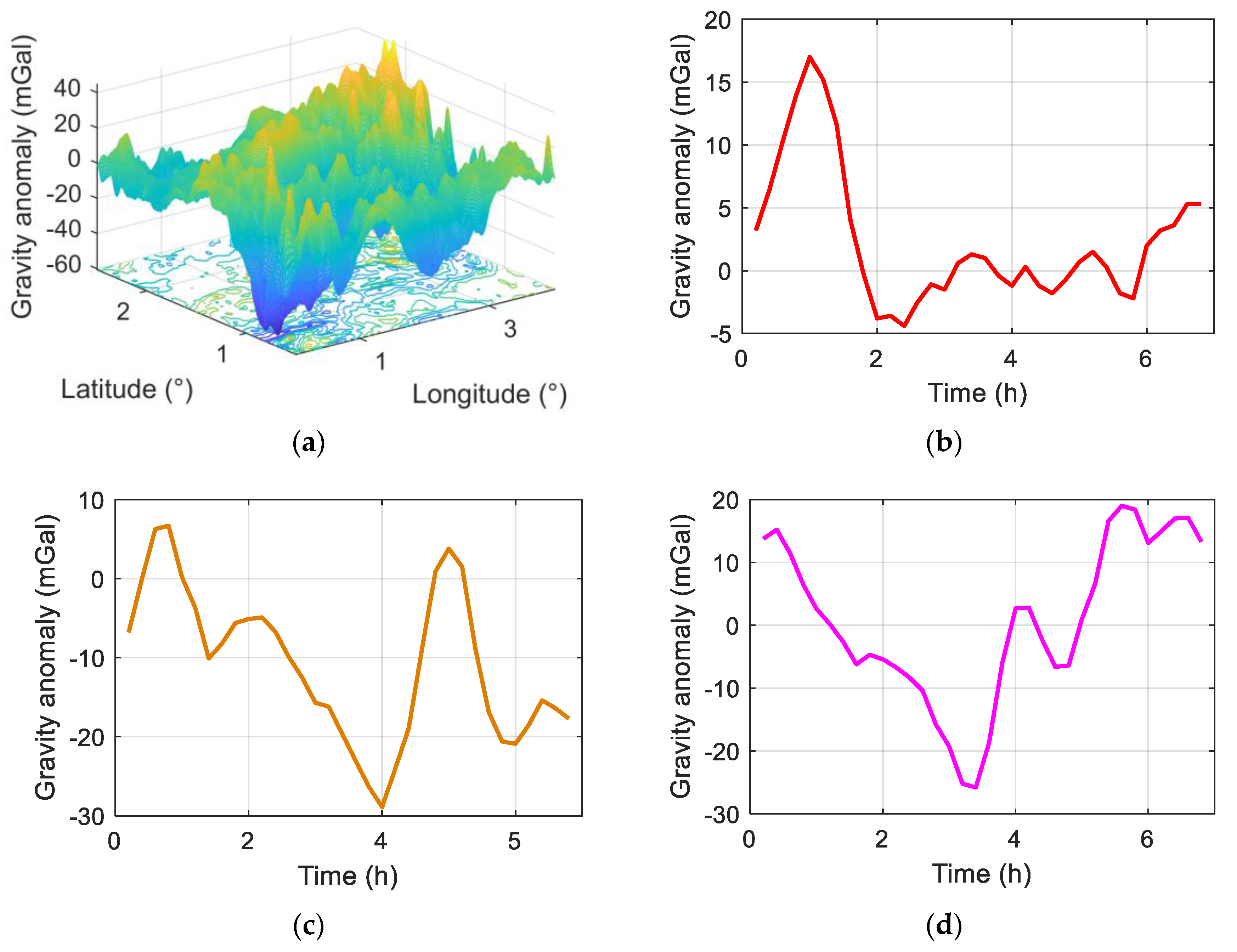
4.1. Field Test
4.2. Results and Analysis
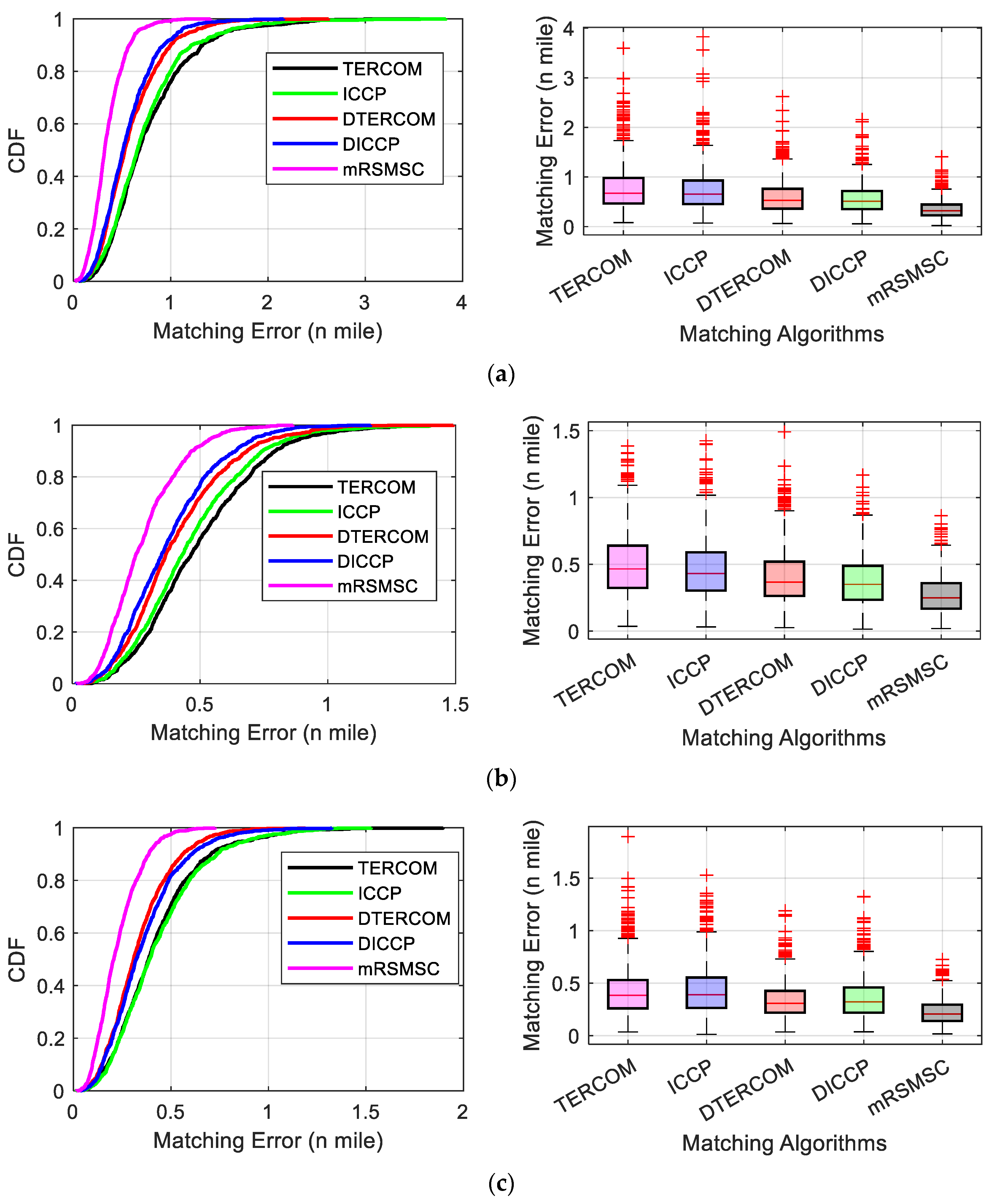
- The average horizontal position errors are positively correlated with the intensity of the gravity anomaly changes on the trajectories, i.e., the more intense the gravity anomaly changes (trajectory 1 < trajectory 2 < trajectory 3), the smaller the average horizontal position error (trajectory 1 > trajectory 2 > trajectory 3) of the matching results;
- The MAE of the mRSMSC is 0.3507 nautical miles (Traj.1), 0.2776 nautical miles (Traj.2), and 0.2276 nautical miles (Traj.3), respectively, which outperformed the TERCOM, ICCP, DTERCOM, and DICCP across all trajectories. Compared with the matching results with the smallest error among the other four algorithms (blue in the table), the mRSMSC improved by about 37.4%, 26.1%, and 32.3%, respectively, with an average improvement of about 31.9%;
- Compared with the remaining four algorithms, the MAE of mRSMSC in the three trajectories improved by about 48.4%, 46.6%, 35.1%, and 33.3%, on average. Combining and comparing the MAE and RMSE of the experimental results, the mRSMSC algorithm shows a better overall performance by having better accuracy and reliability on the three trajectories.
5. Conclusions
- Collecting more extensive field datasets to facilitate a more comprehensive assessment of the algorithm’s performance;
- Explore the combination of the sequence-matching algorithm and filter matching to further improve matching accuracy.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| TERCOM | Terrain Contour Matching |
| ICCP | Doppler Velocity Log |
| DVL | Three letter acronym |
| INS | Inertial Navigation System |
| GAINS | Gravity-Aided Inertial Navigation System |
| COR | Correlation Method |
| MAD | Mean Absolute Differences |
| MSD | Mean Square Differences |
| mRSMSC | Multi-Resolution Sequence Method with Strong Constraints |
| mRSM | multi-resolution sequence matching |
| MAE | Mean Absolute Error |
| RMSE | Root Mean Square Error |
| CDF | Cumulative Distribution Function |
References
- Wang, B.; Wu, L.; Wu, P.; Li, Q.; Bao, L.; Wang, Y. Multidimensional Evaluation of Altimetry Marine Gravity Models with Shipborne Gravity Data from a New Platform Marine Gravimeter. J. Mar. Sci. Eng. 2024, 12, 1314. [Google Scholar] [CrossRef]
- Hwang, C.; Chang, E.T.Y. Seafloor secrets revealed. Science 2014, 346, 32–33. [Google Scholar] [CrossRef] [PubMed]
- Zhao, S.; Zheng, W.; Li, Z.; Zhu, H.; Xu, A. A Novel Cross-line Adaptive Domain Matching Algorithm for Underwater Gravity Aided Navigation. IEEE Geosci. Remote Sens. Lett. 2024, 21, 7503605. [Google Scholar] [CrossRef]
- Gao, S.; Cai, T. Parallel Multiple Methods with Adaptative Decision Making for Gravity-Aided Navigation. J. Mar. Sci. Eng. 2023, 11, 1624. [Google Scholar] [CrossRef]
- Chen, H.; He, Z.; Wang, J.; Zhang, X.; Hou, B. A High-Precision Real-Time Distance Difference Localization Algorithm Based on Long Baseline Measurement. J. Mar. Sci. Eng. 2024, 12, 1724. [Google Scholar] [CrossRef]
- Liu, H.; Wu, L.; Bao, L.; Li, Q.; Zhang, P.; Wang, Y. Gravity matching navigation algorithm based on multiscale search and Hadamard transformed difference. ISA Trans. 2022, 128, 409–422. [Google Scholar] [CrossRef]
- Yu, H.; Li, Z.; Yang, W.; Shen, T.; Liang, D.; He, Q. Underwater Geomagnetic Localization Based on Adaptive Fission Particle-Matching Technology. J. Mar. Sci. Eng. 2023, 11, 1739. [Google Scholar] [CrossRef]
- Wang, B.; Cai, T. Path Planning Method for Underwater Gravity-Aided Inertial Navigation Based on PCRB. J. Mar. Sci. Eng. 2023, 11, 993. [Google Scholar] [CrossRef]
- Liu, H.; Wu, L.; Bao, L.; Li, Q.; Zhang, P.; Xi, M. Comprehensive Features Matching Algorithm for Gravity Aided Navigation. IEEE Geosci. Remote Sens. Lett. 2022, 19, 1505305. [Google Scholar] [CrossRef]
- Han, Y.; Wang, B.; Deng, Z.; Wang, S.; Fu, M. A Mismatch Diagnostic Method for TERCOM-Based Underwater Gravity-Aided Navigation. IEEE Sens. J. 2017, 17, 2880–2888. [Google Scholar] [CrossRef]
- Wang, B.; Zhu, J.; Ma, Z.; Deng, Z.; Fu, M. Improved Particle Filter-Based Matching Method with Gravity Sample Vector for Underwater Gravity-Aided Navigation. IEEE Trans. Ind. Electron. 2021, 68, 5206–5216. [Google Scholar] [CrossRef]
- Wang, Z.; Huang, Y.; Wang, M.; Wu, J.; Zhang, Y. A Computationally Efficient Outlier-Robust Cubature Kalman Filter for Underwater Gravity Matching Navigation. IEEE Trans. Instrum. Meas. 2022, 71, 8500418. [Google Scholar] [CrossRef]
- Han, Y.; Wang, B.; Deng, Z.; Fu, M. A Combined Matching Algorithm for Underwater Gravity-Aided Navigation. IEEE/ASME Trans. Mechatron. 2018, 23, 233–241. [Google Scholar] [CrossRef]
- Zou, J.; Cai, T. Improved Particle Swarm Optimization Screening Iterative Algorithm in Gravity Matching Navigation. IEEE Sens. J. 2022, 22, 20866–20876. [Google Scholar] [CrossRef]
- Ma, Z.; Wang, B.; Huang, L.; Cui, F.; Deng, Z.; Fu, M. Dimension-Expanded-Based Matching Method with Siamese Convolutional Neural Networks for Gravity-Aided Navigation. IEEE Trans. Ind. Electron. 2023, 70, 10496–10505. [Google Scholar] [CrossRef]
- Kamgar-Parsi, B.; Kamgar-Parsi, B. Vehicle localization on gravity maps. Unmanned Ground Veh. Technol. 1999, 3693, 182–191. [Google Scholar]
- Wei, E.; Dong, C. A Robust Solution of Integrated SITAN with TERCOM Algorithm: Weight-Reducing Iteration Technique for Underwater Vehicles’ Gravity-Aided Inertial Navigation System. Navig. J. Inst. Navig. 2017, 64, 111–122. [Google Scholar] [CrossRef]
- Liu, M.; Wang, B.; Deng, Z.; Fu, M. Improved ICCP Algorithm and Its Application in Gravity Matching Aided Inertial Navigation System. In Proceedings of the 33rd Chinese Control Conference, Nanjing, China, 28–30 July 2014. [Google Scholar]
- Wu, L.; Wang, H.; Chai, H.; Hsu, H.; Wang, Y. Research on the Relative Positions-Constrained Pattern Matching Method for R Underwater Gravity-Aided Inertial Navigation. J. Navig. 2015, 68, 937–950. [Google Scholar] [CrossRef]
- Han, Y.; Wang, B.; Deng, Z.; Fu, M. An Improved TERCOM-Based Algorithm for Gravity-Aided Navigation. IEEE Sens. J. 2016, 16, 2537–2544. [Google Scholar] [CrossRef]
- Li, Z.W.; Zheng, W.; Wu, F.; Fang, J. Improving the Matching Efficiency of Undrwater Gravity Matching Navigation Based on a New Hierarchical Neighborhood Threshold Method. Chinese J. Geophys. 2019, 62, 2405–2416. [Google Scholar]
- Zhao, S.; Zheng, W.; Li, Z.; Zhu, H.; Xu, A. Improving Matching Efficiency and Out-of-domain Reliability of Underwater Gravity Matching Navigation Based on a Novel Soft-margin Local Semicircular-domain Re-searching Model. Remote Sens. 2022, 14, 2129. [Google Scholar] [CrossRef]
- Zhao, S.; Zheng, W.; Li, Z.; Zhu, H.; Xu, A. Improving Matching Efficiency and Out-of-Domain Positioning Reliability of Underwater Gravity Matching Navigation Based on a Novel Domain-Cnter Adaptive-Transfer Matching Method. IEEE Trans. Instrum. Meas. 2023, 72, 1001811. [Google Scholar]
- Liu, F.; Li, F.; Lin, N.; Jing, X. Gravity Aided Positioning Based on Real-Time ICCP with Optimized Matching Sequence Length. IEEE Access 2019, 7, 97440–97456. [Google Scholar] [CrossRef]
- Wang, B.; Ma, Z.; Huang, L.; Deng, Z.; Fu, M. A Filtered-Marine Map-Based Matching Method for Gravity Aided Navigation of Underwater Vehicles. IEEE/ASME Trans. Mechatron. 2022, 27, 4507–4517. [Google Scholar] [CrossRef]
- Zhang, J.; Zhang, T.; Zhang, C.; Yao, Y. An Improved ICCP-Based Underwater Terrain Matching Algorithm for Large Initial Position Error. IEEE Sens. J. 2022, 22, 16381–16391. [Google Scholar] [CrossRef]
- Xie, W.; Qu, Z.; Li, Q. A Fast Algorithm of the Geomagnetic Correlaton Matching Based on MSD. In Proceedings of the Third International Conference on Control, Automation and Systems Engineering (CASE-13), Auckland, New Zealand, 28–29 August 2013. [Google Scholar]
- Gao, S.; Cai, T. A Cascade Gravity Matching Algorithm with Large Iniial Position Error. IEEE Sensors J. 2023, 23, 25804–25812. [Google Scholar] [CrossRef]
- Roy, D. Discrete Rayleigh distribution. IEEE Trans. Reliab. 2004, 53, 255–260. [Google Scholar] [CrossRef]
- Mendonça, L.F.; Sousa, J.M.C.; Vieira, S.M. Fault Diagnosis of Maritime Equipment Using an Intelligent Fuzzy Framework. J. Mar. Sci. Eng. 2024, 12, 1737. [Google Scholar] [CrossRef]
- Mao, N.; Li, A.; Xu, J.; Qin, F.; Li, J. A Two-Dimensional Gravity Map Matching Method Based on the Earth’s Axis Projection. J. Chin. Inert. Technol. 2022, 30, 783–790. [Google Scholar]
- Yuan, Y.; Gao, J.; Wu, Z.; Shen, Z.; Wu, G. Performance estimate of some prototypes of inertial platform and strapdown marine gravimeters. Earth Planets Space 2020, 72, 89. [Google Scholar] [CrossRef]
- Sandwell, D.T.; Smith, W.H. Marine gravity anomaly from Geosat and ERS 1 satellite altimetry. J. Geophys. Res. Solid Earth. 1997, 102, 10039–10054. [Google Scholar] [CrossRef]
- Sandwell, D.T.; Müller, R.D.; Smith, W.H.; Garcia, E.; Francis, R. New global marine gravity model from CryoSat-2 and Jason-1 reveals buried tectonic structure. Science 2014, 346, 65–67. [Google Scholar] [CrossRef] [PubMed]
- Sandwell, D.T.; Harper, H.; Tozer, B.; Smith, W.H.F. Gravity field recovery from geodetic altimeter missions. Adv. Space Res. 2021, 68, 1059–1072. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithm: | mRSM |
|---|---|
| Input | , , . |
| Output | after mRSM matching. |
| Step 1 | ) background field, and the large initial position error is quickly suppressed; |
| Step 2 | , ; |
| Step 3 | . |
| Algorithm | Flight Path 1 | Flight Path 2 | Tracks 3 | |||
|---|---|---|---|---|---|---|
| MAE | RMSE | MAE | RMSE | MAE | RMSE | |
| SINS | 9.6001 | 9.6253 | 9.6416 | 9.6667 | 9.5993 | 9.6241 |
| TERCOM | 0.7773 | 0.8383 | 0.4952 | 0.5245 | 0.4240 | 0.4564 |
| ICCP | 0.7389 | 0.7978 | 0.4621 | 0.4983 | 0.4328 | 0.4667 |
| DTERCOM | 0.5949 | 0.6417 | 0.4074 | 0.4380 | 0.3362 | 0.3620 |
| DICCP | 0.5600 | 0.6038 | 0.3757 | 0.4051 | 0.3580 | 0.3842 |
| mRSMSC | 0.3507 | 0.3770 | 0.2776 | 0.2986 | 0.2276 | 0.2444 |
| Improvement * | 37.4% | 37.5% | 26.1% | 26.3% | 32.3% | 32.5% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mao, N.; Li, A.; Xu, J.; Qin, F. A Multi-Resolution Sequence Method with Strong Constraints for Marine Gravity Matching Navigation. J. Mar. Sci. Eng. 2025, 13, 542. https://doi.org/10.3390/jmse13030542
Mao N, Li A, Xu J, Qin F. A Multi-Resolution Sequence Method with Strong Constraints for Marine Gravity Matching Navigation. Journal of Marine Science and Engineering. 2025; 13(3):542. https://doi.org/10.3390/jmse13030542
Chicago/Turabian StyleMao, Ning, An Li, Jiangning Xu, and Fangjun Qin. 2025. "A Multi-Resolution Sequence Method with Strong Constraints for Marine Gravity Matching Navigation" Journal of Marine Science and Engineering 13, no. 3: 542. https://doi.org/10.3390/jmse13030542
APA StyleMao, N., Li, A., Xu, J., & Qin, F. (2025). A Multi-Resolution Sequence Method with Strong Constraints for Marine Gravity Matching Navigation. Journal of Marine Science and Engineering, 13(3), 542. https://doi.org/10.3390/jmse13030542