
Real-Time Digital Twin of Ship Structure Deformation Field Based on the Inverse Finite Element Method


Abstract
1. Introduction
2. Methodology
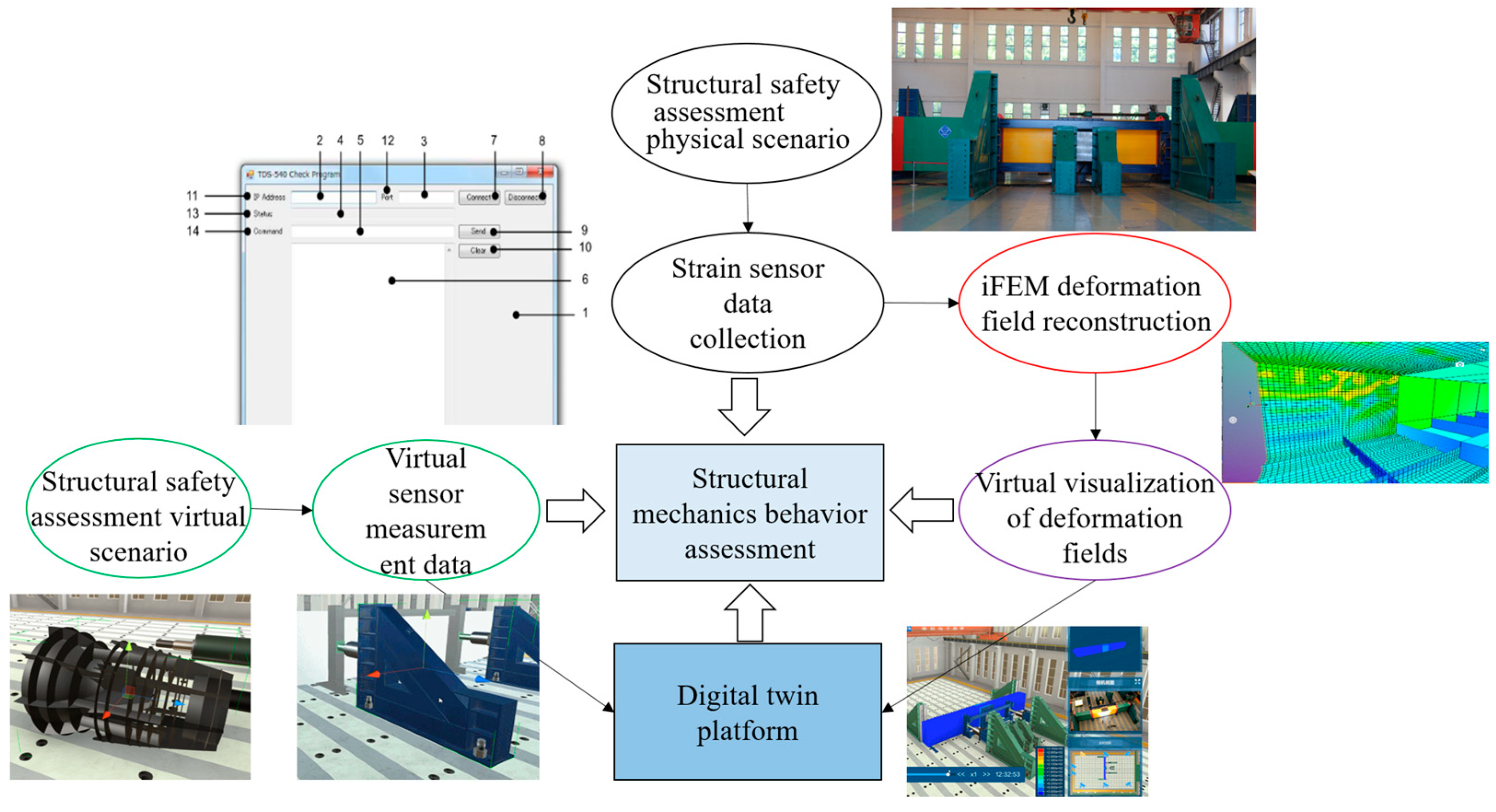
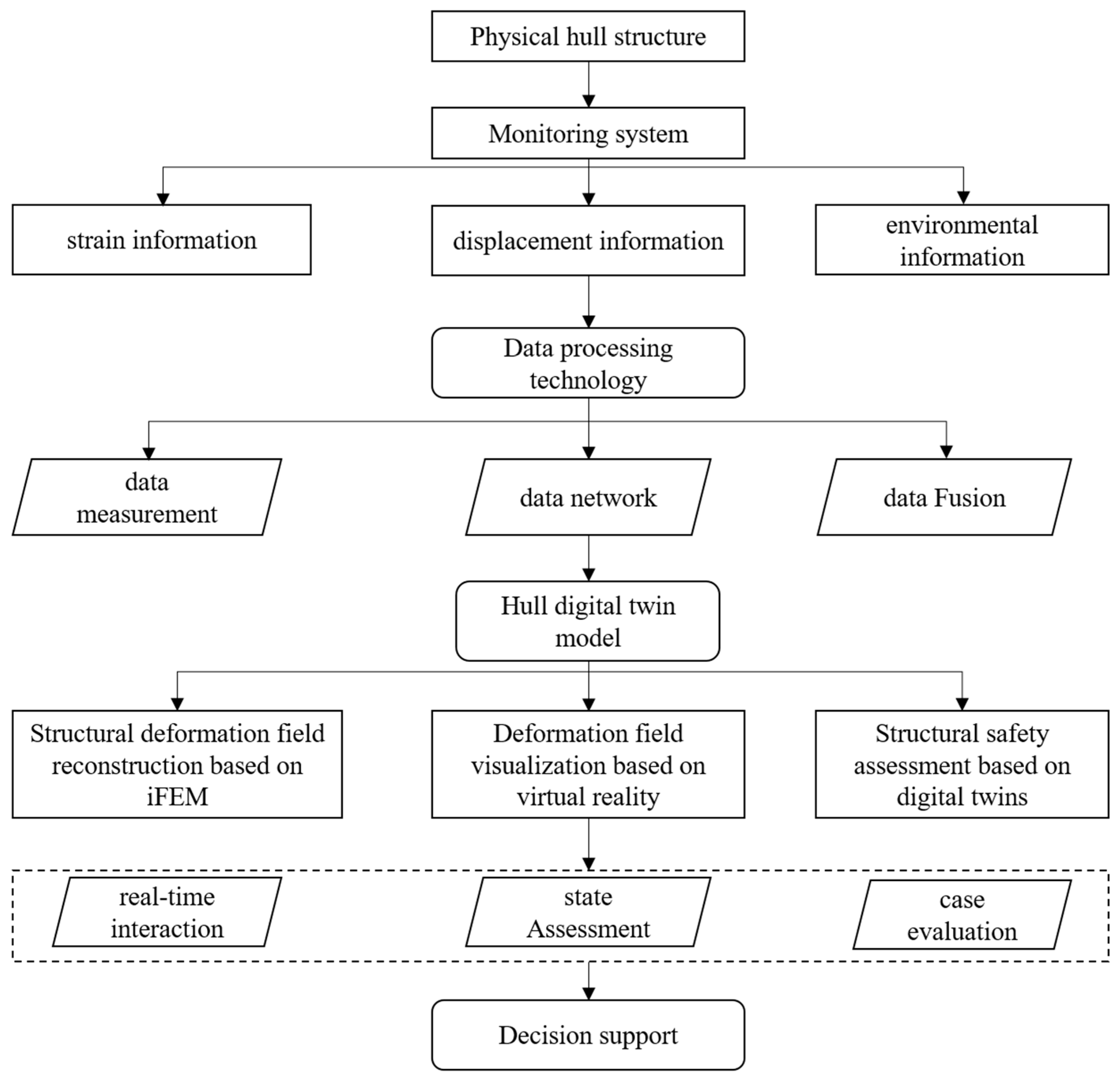
2.1. Real-Time Digital Twin of Ship Structure Deformation Field
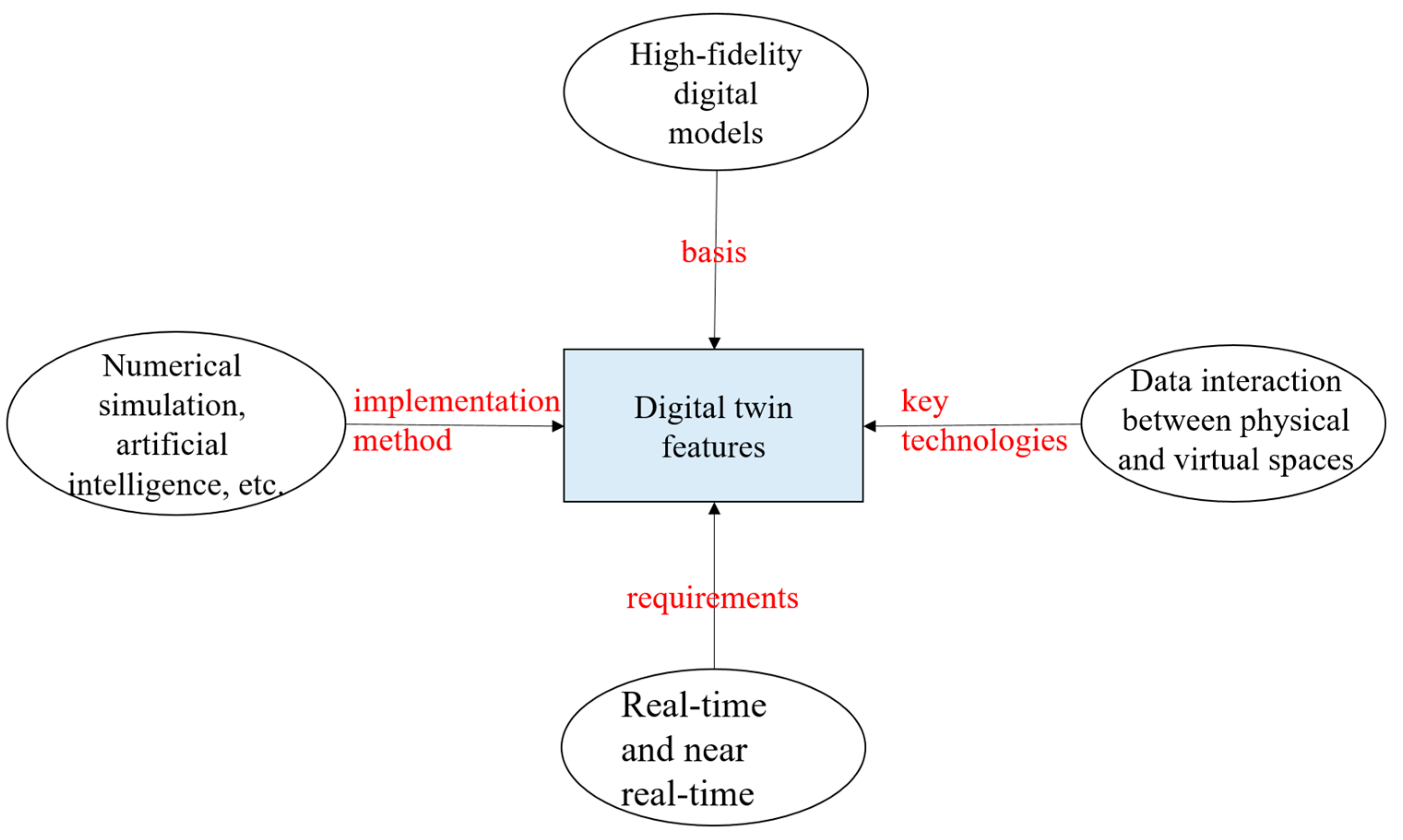
2.2. Digital Twin Architecture
- (1)
- The transition from physical space to virtual space rests on the premise that the digital model possesses high fidelity.
- (2)
- The implementation approach involves numerical simulation technology and artificial intelligence.
- (3)
- The key technology lies in facilitating data interaction between physical and virtual spaces.
- (4)
- The implementation requirement is to meet real-time performance as much as possible.
2.3. Inverse Finite Element Formulation for Shells
2.3.1. Quadrilateral Inverse-Shell Element
2.3.2. Input Data from In Situ Strain Sensors
2.3.3. Weighted Least-Squares Function
2.4. Visualization and Visual Interaction
- (1)
- Improve access to data sources and automation level.
- (2)
- Provide higher data processing efficiency and facilitate verification by design and engineering personnel.
- (3)
- Enhance the immersive exploration of data results.
- (4)
- Enhance the interactivity of simulation results.
- (5)
- Traceability and consistency of data result conversion.
3. Case Studies for Real-Time Digital Twin
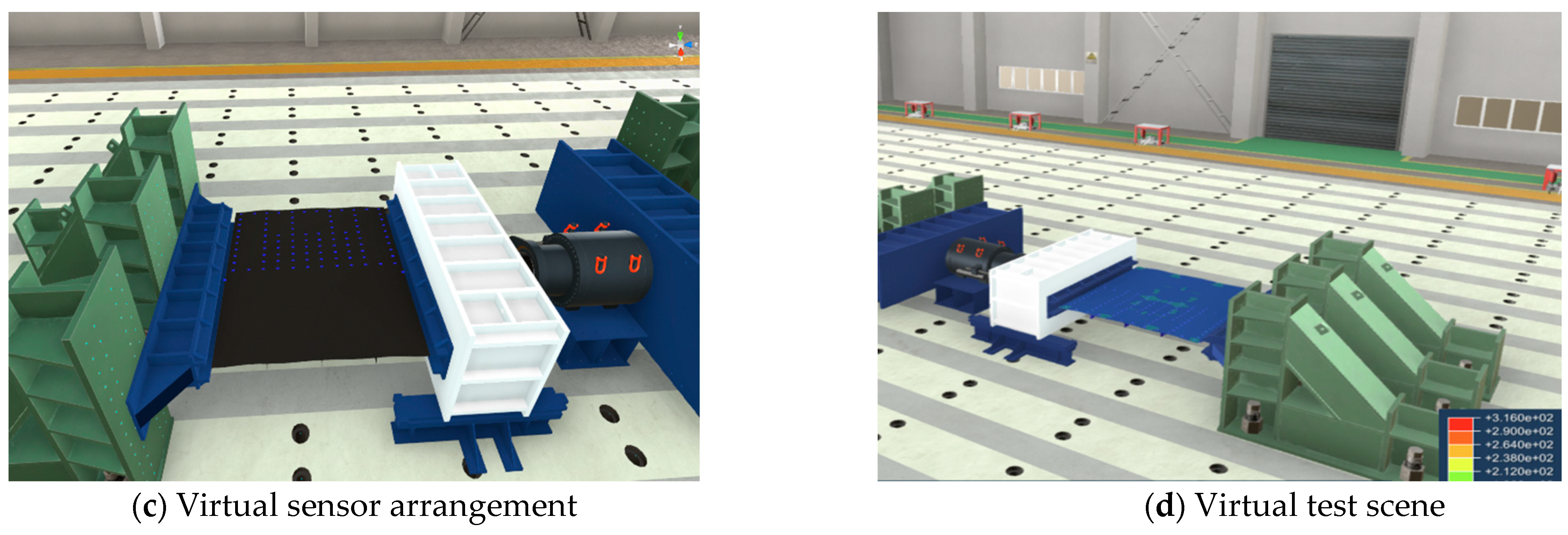
3.1. Application Objects and Test Preparation
3.2. Ship Structural Mechanics Test Digital Twin
3.3. Visualization and Interaction
3.4. Real-Time Digital Twin Platform
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Fonseca, Í.A.; Gaspar, H.M. Challenges when creating a cohesive digital twin ship: A data modelling perspective. Ship Technol. Res. 2021, 68, 70–83. [Google Scholar] [CrossRef]
- Momdoro, A.; Soliman, M.; Frangopol, D.M. Prediction of structural response of naval vessels based on available structural health monitoring data. Ocean. Eng. 2016, 125, 295–307. [Google Scholar] [CrossRef]
- Johnson, N.R.; Lynch, J.P.; Collette, M.D. Response and fatigue assessment of high speed aluminium hulls using short-term wireless hull monitoring. Struct. Infrastruct. Eng. 2018, 14, 634–651. [Google Scholar] [CrossRef]
- Jo, J.; Jo, B.; Khan, R.M.A.; Kim, J. A cloud computing-based damage prevention system for marine structures during berthing. Ocean. Eng. 2019, 180, 23–28. [Google Scholar] [CrossRef]
- Chung, W.C.; Pestana, G.R.; Kim, M. Structural health monitoring for TLP-FOWT (floating offshore wind turbine) tendon using sensors. Appl. Ocean. Res. 2021, 113, 102740. [Google Scholar] [CrossRef]
- Mieloszyk, M.; Majewska, K.; Ostachowicz, W. Application of embedded fiber Bragg grating sensors for structural health monitoring of complex composite structures for marine applications. Mar. Struct. 2021, 76, 102903. [Google Scholar] [CrossRef]
- Karvelis, P.; Georgoulas, G.; Kappatos, V.; Stylios, C. Deep machine learning for structural health monitoring on ship hulls using acoustic emission method. Ships Offshore Struct. 2021, 16, 440–448. [Google Scholar] [CrossRef]
- Silionis, N.E.; Anyfantis, K.N. Static strain-based identification of extensive damages in thin-walled structures. Struct. Health Monit. 2022, 21, 2026–2047. [Google Scholar] [CrossRef]
- Arrichiello, V.; Gualeni, P. Systems engineering and digital twin: A vision for the future of cruise ships design, production and operations. Int. J. Interact. Des. Manuf. 2020, 14, 115–122. [Google Scholar] [CrossRef]
- Ibrion, M.; Paltrinieri, N.; Nejad, A.R. Learning from failures in cruise ship industry: The blackout of Viking Sky in Hustadvika, Norway. Eng. Fail. Anal. 2021, 125, 105355. [Google Scholar] [CrossRef]
- Woolley, A.; Whitehouse, T. A modelling and simulation framework to assess integrated survivability of naval platforms in high threat environments. Ocean. Eng. 2022, 257, 111479. [Google Scholar] [CrossRef]
- Mauro, F.; Kana, A.A. Digital twin for ship life-cycle: A critical systematic review. Ocean. Eng. 2022, 269, 113479. [Google Scholar] [CrossRef]
- Ludvigsen, K.B.; Smogeli, Ø. Digital Twins for Blue Denmark. Marine Cybernetics Advisory; DNV GL Maritime: Hamburg, Germany, 2018. [Google Scholar]
- Coraddu, A.; Oneto, L.; Baldi, F.; Cipollini, F.; Atlar, M.; Savio, S. Data driven ship digital twin for estimating the speed loss caused by the marine fouling. Ocean. Eng. 2019, 186, 106063. [Google Scholar] [CrossRef]
- Tofte, B.L.; Vennemann, O.; Mitchell, F.; Millington, N.; McGuire, L. How digital technology and standardisation can improve offshore operations. In Proceedings of the Offshore Technology Conference, Offshore Technology Conference, Houston, TX, USA, 6–9 May 2019. [Google Scholar]
- Bernasconi, A.; Kharshiduzzaman, M.; Anodio, L.F.; Bordegoni, M.; Re, G.M.; Braghin, F.; Comolli, L. Development of a monitoring system for crack growth in bonded single-lap joints based on the strain field and visualization by augmented reality. J. Adhes. 2014, 90, 496–510. [Google Scholar] [CrossRef]
- Schirmann, M.; Collette, M.; Gose, J. Ship motion and fatigue damage estimation via a digital twin. In Proceedings of the 6th International Symposium on Life-Cycle Civil Engineering (IALCCE), Ghent, Belgium, 28–31 October 2018; Caspeele, R., Taerwe, L., Frangopol, D.M., Eds.; CRC Press: Boca Raton, FL, USA, 2018; pp. 2075–2082. [Google Scholar]
- Lloyds Register. ShipRight Ship Event Analysis; Lloyds Register: London, UK, 2004. [Google Scholar]
- American Bureau of Shipping. American Bureau of Shipping Guide for Hull Condition Monitoring Systems; American Bureau of Shipping: Houston, TX, USA, 1995. [Google Scholar]
- Majewska, K.; Mieloszyk, M.; Ostachowicz, W.; Król, A. Experimental method of strain/stress measurements on tall sailing ships using Fibre Bragg Grating sensors. Appl. Ocean. Res. 2014, 47, 270–283. [Google Scholar] [CrossRef]
- Tessler, A. A Variational Principle for Reconstruction of Elastic Deformations in Shear Deformable Plates and Shells; National Aeronautics and Space Administration, Langley Research Center: Hampto, VA, USA, 2003. [Google Scholar]
- Tessler, A.; Spangler, J.L. Inverse FEM for full-field reconstruction of elastic deformations in shear deformable plates and shells. In Proceedings of the 2nd European Workshop on Structural Health Monitoring, Munich, Germany, 7–9 July 2004. [Google Scholar]
- Gherlone, M.; Cerracchio, P.; Mattone, M.; Di Sciuva, M.; Tessler, A. Shape sensing of 3D frame structures using an inverse finite element method. Int. J. Solids Struct. 2012, 49, 3100–3112. [Google Scholar] [CrossRef]
- Gherlone, M.; Cerracchio, P.; Mattone, M.; Di Sciuva, M.; Tessler, A. An inverse finite element method for beam shape sensing: Theoretical framework and experimental validation. Smart Mater. Struct. 2014, 23, 045027. [Google Scholar] [CrossRef]
- Wang, Y.; Nnaji, B.O. Document-driven design for distributed CAD services in service-oriented architecture. J. Comput. Inf. Sci. Eng. 2006, 6, 127–138. [Google Scholar] [CrossRef][Green Version]
- Freeman, I.; Salmon, J.; Coburn, J. A bi-directional interface for improved interaction with engineering models in virtual reality design reviews. Int. J. Interact. Des. Manuf. 2018, 12, 549–560. [Google Scholar] [CrossRef]
- Kefal, A.; Oterkus, E. Displacement and stress monitoring of a chemical tanker based on inverse finite element method. Ocean. Eng. 2016, 112, 33–46. [Google Scholar] [CrossRef]
- CEI—Creators of Ensight Visualization Software. 2011. Available online: http://www.ensight.com/ (accessed on 29 November 2011).
- VTFx Format—Ceetron. 2011. Available online: http://www.ceetron.com/vtfx format.aspx (accessed on 29 November 2011).
- Song, I.-H.; Yang, J.; Jo, H.; Choi, S. Development of a lightweight CAE middleware for CAE data exchange. Int. J. Comput. Integ M. 2001, 22, 823–835. [Google Scholar] [CrossRef]
- Cho, S.W.; Kim, S.W.; Park, J.-P.; Yang, S.W.; Choi, Y. Engineering collaboration framework with CAE analysis data. Int. J. Precis. Eng. Man. 2011, 12, 635–641. [Google Scholar] [CrossRef]
- Liu, Q.; Li, J.; Liu, J. ParaView visualization of Abaqus output on the mechanical deformation of complex microstructures. Comput. Geosci. 2017, 99, 135–144. [Google Scholar] [CrossRef]
- Hambli, R.; Chamekh, A.; Salah HB, H. Real-time deformation of structure using finite element and neural networks in virtual reality applications. Finite Elem. Anal. Des. 2006, 42, 985–991. [Google Scholar] [CrossRef]
- Connell, M.; Tullberg, O. A framework for immersive FEM visualization using transparent object communication in a distributed network environment. Adv. Eng. Softw. 2002, 33, 453–459. [Google Scholar] [CrossRef]
- Tzong-Ming, C.; Tu, T.H. A fast parametric deformation mechanism for virtual reality applications. Comput. Ind. En. 2009, 57, 520–538. [Google Scholar] [CrossRef]
- Ryken, M.J.; Vance, J.M. Applying virtual reality techniques to the interactive stress analysis of a tractor lift arm. Finite Elem. Anal. Des. 2000, 35, 141–155. [Google Scholar] [CrossRef]
- Lee, J.H.; Nam, Y.S.; Kim, Y.; Liu, Y.; Lee, J.; Yang, H. Real-time digital twin for ship operation in waves. Ocean. Eng. 2022, 266, 112867. [Google Scholar] [CrossRef]
- Assani, N.; Matić, P.; Katalinić, M. Ship’s digital twin—A review of modelling challenges and applications. Appl. Sci. 2022, 12, 6039. [Google Scholar] [CrossRef]
- Tessler, A.; Spangler, J.L. A least-squares variational method for full-field reconstruction of elastic deformations in shear-deformable plates and shells. Comput. Methods Appl. Mech. Eng. 2005, 194, 327–339. [Google Scholar] [CrossRef]
- Maleshkov, S.; Chotrov, D. Post-processing of engineering analysis results for visualization in VR system. Int. J. Comput. Sci. Issues 2013, 10, 258–263. [Google Scholar]
- Rodriguez, I. Dynamic Occlusion Culling Using Octrees with Unity for Virtual Reality; The University of Texas at San Antonio: San Antonio, TX, USA, 2017. [Google Scholar]
- Chen, L.; Xu, J. Optimal delaunay triangulations. J. Comput. Math. 2004, 22, 299–308. [Google Scholar]
- Woo, Y. Abstraction of mid-surfaces from solid models of thin-walled parts: A divide-and-conquer approach. Comput-Aided Des. 2014, 47, 1–11. [Google Scholar] [CrossRef]
- Yeh, T.P.; Vance, J.M. Applying virtual reality techniques to sensitivity-based structural shape design. J. Mech. Des. 1998, 120, 612–619. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Length | Width | Panel Length | Panel Width |
|---|---|---|---|
| 400 | 416.7 | 100 | 69.4 |
| Plate Thickness | Number of T Profiles | Number of Flat Bars | T Profile Parameters hw × tw/bf × tf | Flat Steel Parameters hw × tw |
|---|---|---|---|---|
| 6 | 1 | 4 | 22 × 6/17 × 6 | 10 × 6 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wei, P.; Li, C.; Jiang, Z.; Wang, D. Real-Time Digital Twin of Ship Structure Deformation Field Based on the Inverse Finite Element Method. J. Mar. Sci. Eng. 2024, 12, 257. https://doi.org/10.3390/jmse12020257
Wei P, Li C, Jiang Z, Wang D. Real-Time Digital Twin of Ship Structure Deformation Field Based on the Inverse Finite Element Method. Journal of Marine Science and Engineering. 2024; 12(2):257. https://doi.org/10.3390/jmse12020257
Chicago/Turabian StyleWei, Pengyu, Chuntong Li, Ze Jiang, and Deyu Wang. 2024. "Real-Time Digital Twin of Ship Structure Deformation Field Based on the Inverse Finite Element Method" Journal of Marine Science and Engineering 12, no. 2: 257. https://doi.org/10.3390/jmse12020257
APA StyleWei, P., Li, C., Jiang, Z., & Wang, D. (2024). Real-Time Digital Twin of Ship Structure Deformation Field Based on the Inverse Finite Element Method. Journal of Marine Science and Engineering, 12(2), 257. https://doi.org/10.3390/jmse12020257