
Deep Water Subsea Energy Storage, Lessons Learned from the Offshore Oil and Gas Industry




Abstract
1. Introduction
2. System Description
2.1. Subsea Energy Storage
2.2. Subsea Energy Storage Concept
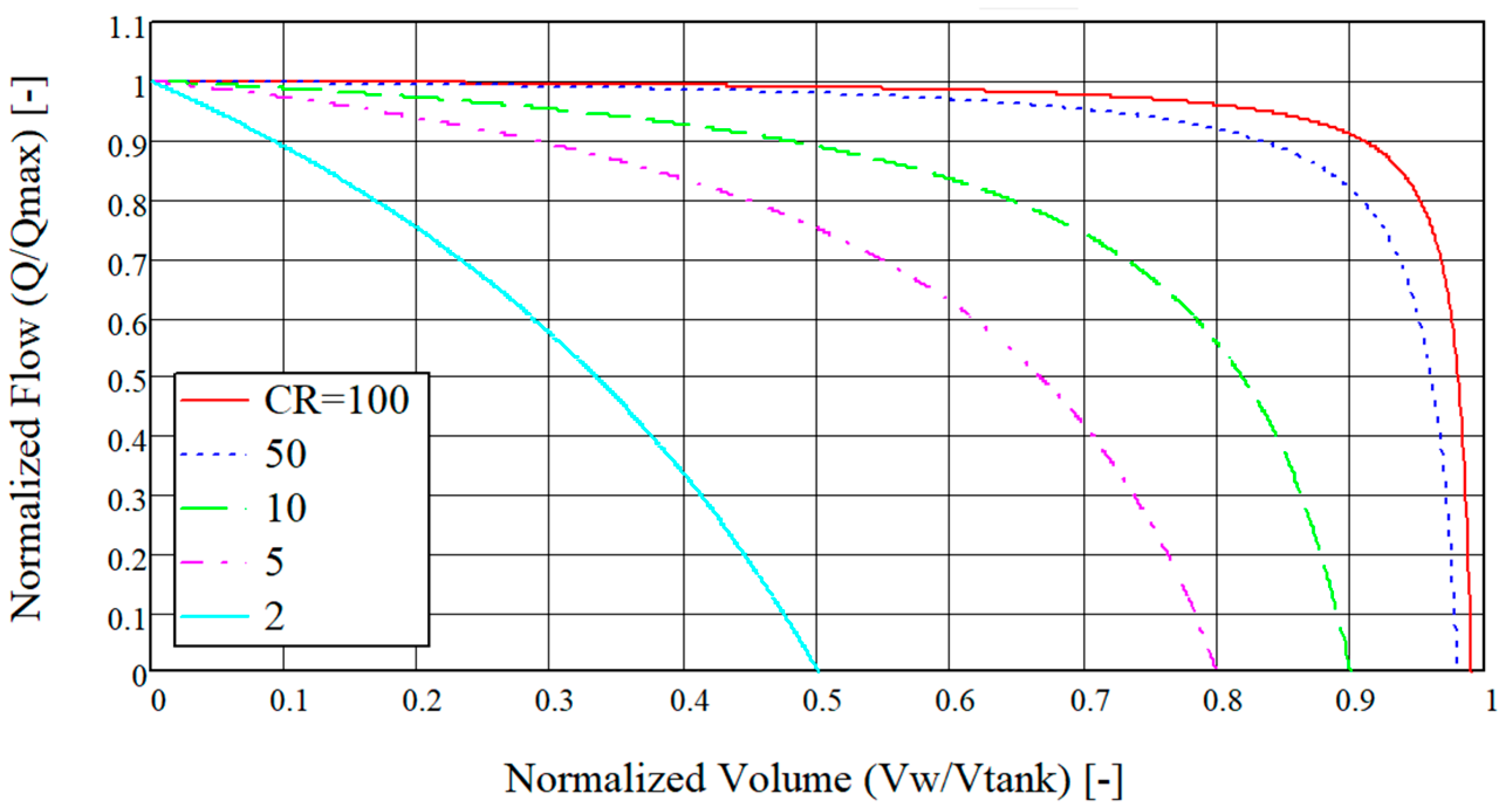
2.2.1. Properties of Subsea Energy Storage in a Rigid Gas Filled Tank
2.2.2. Charging and Discharging
3. State-of-the-Art Subsea Engineering
3.1. Subsea Control Systems and Rotating Machinery
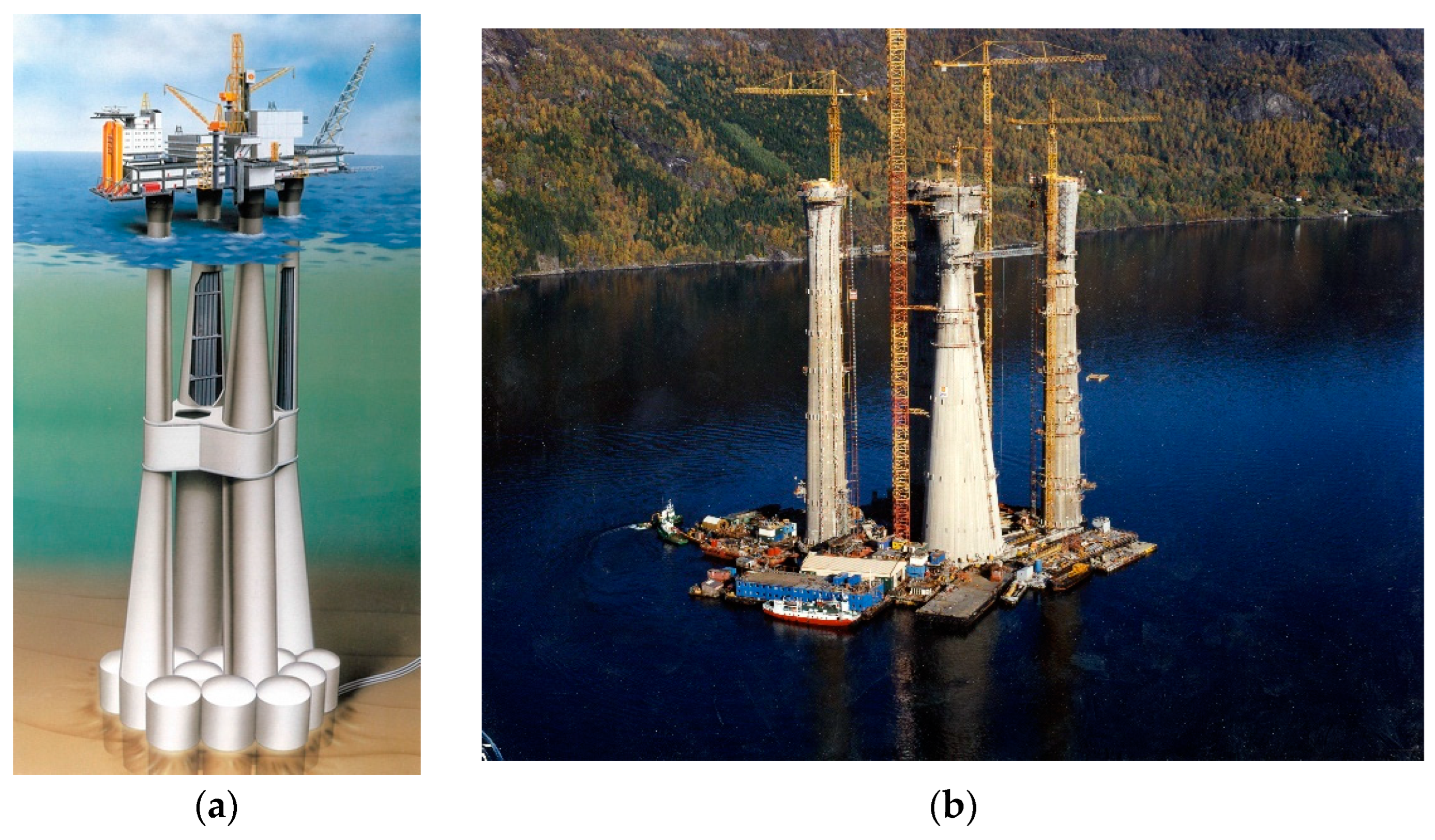
3.2. Installation of Large-Scale Subsea Structures
3.3. Trawl Protection
3.4. Concrete Structural Design
4. Method
4.1. Structural Design

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Source | Total Safety Factor [-] | Comment | Ref. |
|---|---|---|---|
| DNV-ST-C502 Offshore concrete structures | Includes a load factor . The total safety factor depends on the compressive strength of the concrete and an approximate number is shown in this table. | [44] | |
| NCEL | Based on experimental data. Structure not to contain people. | [40] | |
| ORES | [5] |
4.1.1. Ballast Needed
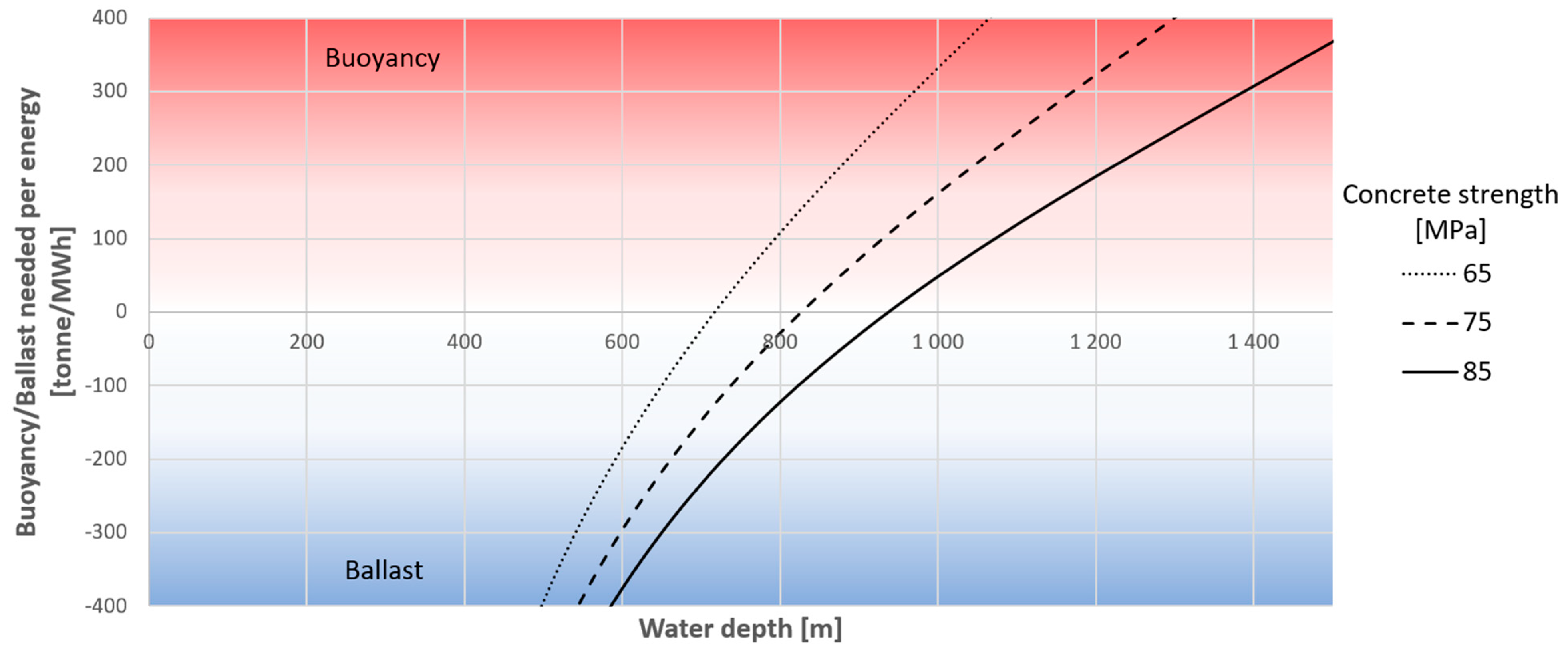
4.1.2. Buoyancy Needed
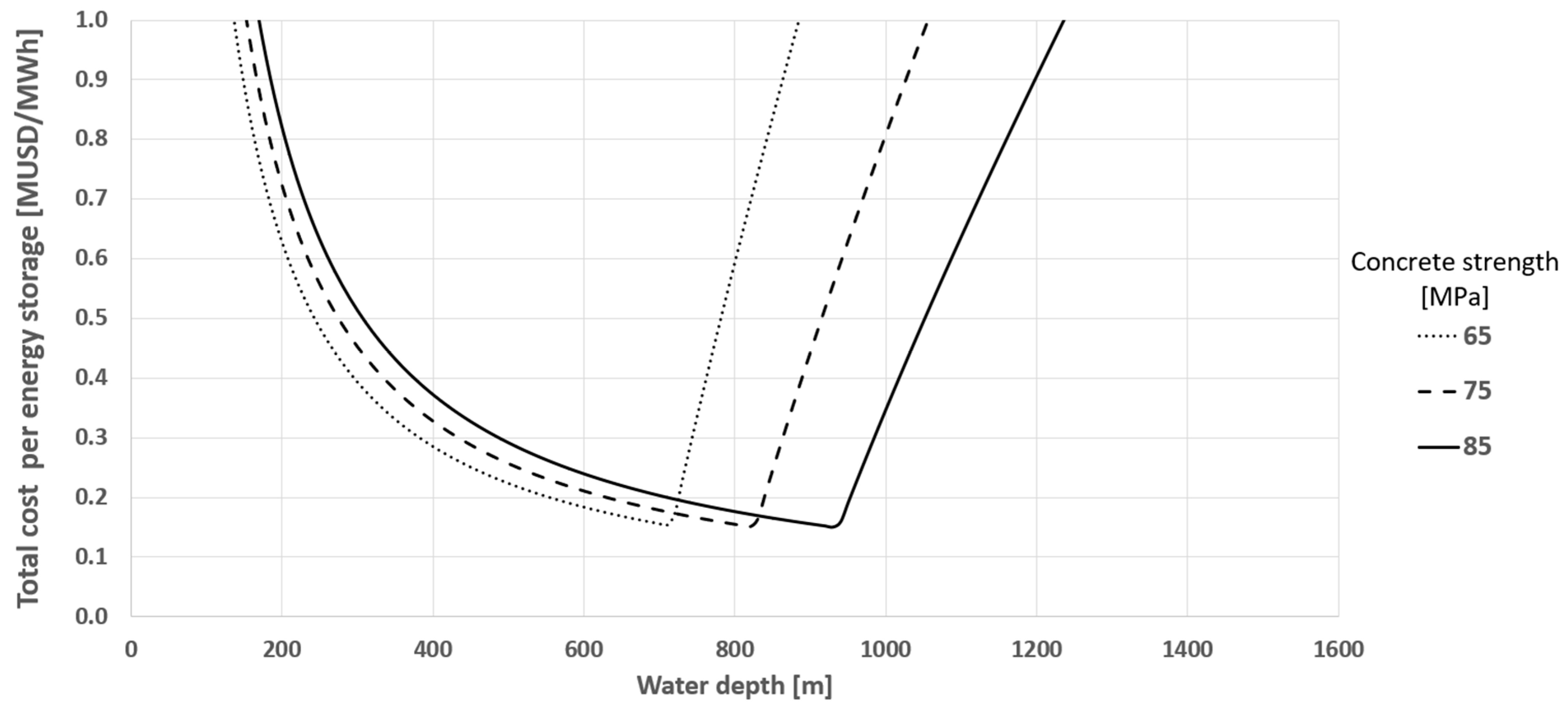
4.2. Total Cost Storage Tank per Energy
5. Results and Discussion
5.1. Buoyancy and Ballast Requirements
5.2. Total Cost Storage Tank
5.3. Further Work
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
| 1 | https://www.onesubsea.slb.com/ (accessed on 11 December 2024). |
| 2 | www.sintef.no (accessed on 11 December 2024) |
| 3 | https://www.trelleborg.com/en/applied-technologies/products-and-solutions/buoyancy (accessed on 11 December 2024). |
| 4 | https://matrixengineered.com/products-services/subsea/ (accessed on 11 December 2024). |
| 5 | https://www.balmoraloffshore.com/solutions/buoyancy/modular-buoyancy (accessed on 11 December 2024). |
References
- Juhlin, R.; Assadi, M. Lessons from the Offshore Oil and Gas Industry for Hydro-Pneumatic Subsea Energy Storage Concepts. In Proceedings of the International Conference of Applied Energy (ICAE), Bochum, Germany, 8–11 August 2022; Volume 28. [Google Scholar] [CrossRef]
- IEA. Battery Innovation Must Drive the 50-Fold Increase in Storage Capacity Needed by 2040; IEA: Paris, France, 2020. [Google Scholar]
- Schmidt, O.; Melchior, S.; Hawkes, A.; Staffell, I. Projecting the Future Levelized Cost of Electricity Storage Technologies. Joule 2019, 3, 81–100. [Google Scholar] [CrossRef]
- Mongird, K.; Viswanathan, V.V.; Balducci, P.J.; Alam MJ, E.; Fotedar, V.; Koritarov, V.S.; Hadjerioua, B. Energy Storage Technology and Cost Characterization Report; Pacific Northwest National Laboratory (PNNL): Richland, WA, USA, 2019; p. 120. [Google Scholar]
- Slocum, A.H.; Fennell, G.E.; Dundar, G.; Hodder, B.G.; Meredith, J.D.C.; Sager, M.A. Ocean Renewable Energy Storage (ORES) System: Analysis of an Undersea Energy Storage Concept. Proc. IEEE 2013, 101, 906–924. [Google Scholar] [CrossRef]
- Cazzaniga, R.; Cicu, M.; Marrana, T.; Rosa-Clot, M.; Rosa-Clot, P.; Tina, G.M. DOGES: Deep ocean gravitational energy storage. J. Energy Storage 2017, 14, 264–270. [Google Scholar] [CrossRef]
- Puchta, M.; Bard, J.; Dick, C.; Hau, D.; Krautkremer, B.; Thalemann, F.; Hahn, H. Development and testing of a novel offshore pumped storage concept for storing energy at sea−Stensea. J. Energy Storage 2017, 14, 271–275. [Google Scholar] [CrossRef]
- Hahn, H.; Hau, D.; Dick, C.; Puchta, M. Techno-economic assessment of a subsea energy storage technology for power balancing services. Energy 2017, 133, 121–127. [Google Scholar] [CrossRef]
- Almén, J.; Falk, J. Subsea Pumped Hydro Storage A Technology Assessment. In Department of Energy and Environment; CHALMERS University of Technology: Gothenburg, Sweden, 2013. [Google Scholar]
- Juhlin, R.; Assadi, M. Investigations of the thermodynamic efficiency limits of a novel subsea energy storage concept. Appl. Energy 2023, 330, 120338. [Google Scholar] [CrossRef]
- Juhlin, R.; Assadi, M. Harnessing ocean depths for energy: A theoretical framework for evaluating the feasibility of Subsea Pumped Hydro Storage. J. Energy Storage 2024, 83, 110510. [Google Scholar] [CrossRef]
- Musial, W.; Hitt, C.C.; Sloan, C.; Pilot, J.; Groenveld, K. National Offshore Wind Research and Development Consortium-Research and Development Roadmap 3.0; National Offshore Wind Research and Development Consortium: Albany, NY, USA, 2021. [Google Scholar]
- Collins, L. Energy islands plan for North Sea ‘feasible’, says consortium. Recharge. 2019. Available online: https://www.rechargenews.com/wind/energy-islands-plan-for-north-sea-feasible-says-consortium/2-1-635620 (accessed on 11 December 2024).
- Jones, C.; Low Carbon Contracts Company, L.C.C. CfD Co-Location Generator Guidance Version 1. 2023. Available online: https://www.lowcarboncontracts.uk/resources/guidance-and-publications/cfd-co-location-generator-guidance/ (accessed on 11 December 2024).
- Juhlin, R.; Eren, E.; Kloster, E.; Hoen, M.; Hörler, M.; Kharabe, S.; Buhagiar, D. Increasing revenues of offshore wind farms with co-located energy storage systems. J. Phys. Conf. Ser. 2024, 2875, 012038. [Google Scholar] [CrossRef]
- Equinor. Equinor Put Trollvind on Hold. 2023. Available online: https://www.equinor.com/news/20230522-trollvind-on-hold (accessed on 11 December 2024).
- Norfolk Boreas: Work on Offshore Wind Farm Stops over Soaring Costs. BBC 2023. Available online: https://www.bbc.com/news/uk-england-norfolk-66263340 (accessed on 11 December 2024).
- Mooney, D. Large-Scale Energy Storage. In Stanford University Global Climate & Energy Project; Stanford University: Stanford, CA, USA, 2015. [Google Scholar]
- Buhagiar, D.; Sant, T.; Farrugia, R.N.; Aquilina, L.; Farrugia, D.; Strati, F.M. Small-scale Experimental Testing of a Novel Marine Floating Platform with Integrated Hydro-pneumatic Energy Storage. J. Energy Storage 2019, 24, 100774. [Google Scholar] [CrossRef]
- Olsen, A. 20 Years of Subsea Boosting Technology Development. In Marine, Construction & Engineering Deepwater Development (MCEDD); OneSubsea: Houston, TX, USA, 2014. [Google Scholar]
- Increasing Deepwater Reservoir Recovery with Subsea Boosting Technology. Scandinavian Oil-Gas Magazine, 2015; No 5/6. 53–54.
- Tønnesen, H.; Hadland, G. Oil and Gas Fields in Norway. Industrial Heritage Plan; Norwegian Petroleum Museum: Stavanger, Norway, 2011; p. 268. [Google Scholar]
- Schwerdtfeger, T.; Scott, B.; Akker, J.v.d. World-First All-Electric Subsea Well. In Proceedings of the Offshore Technology Conference, Aberdeen, UK, 5–8 September 2017; p. D031S038R002. [Google Scholar]
- Hallset, J.-O. Ormen Lange Fase 3-Undervannskompresjon; Shell, A.S.N., Ed.; Norwegian Offshore Directorate: Stavanger, Norway, 2022.
- Petoro. PUD for Ormen Lange Undervannskompresjon; Petoro: Stavanger, Norway, 2021. [Google Scholar]
- Narayanaswamy, V. Review of challenges in reliable electric power delivery to remote deep water enhanced oil recovery systems. Appl. Ocean Res. 2013, 43, 53–67. [Google Scholar] [CrossRef]
- Storstenvik, A. Subsea Compression-Designing and Building a Subsea Compressor Station. In Proceedings of the Offshore Technology Conference, Houston, TX, USA, 2 May 2016. [Google Scholar]
- Birkeland, B.; Bøe, C.; Jensen, R.O. Gullfaks Subsea Compression-Subsea Commissioning, Start-Up and Operational Experiences. In Proceedings of the Offshore Technology Conference, Houston, TX, USA, 2–5 May 2016; p. D021S024R005. [Google Scholar]
- Daasvatn, S.; Juhlin, R.; Sæterdal, M. Modular Integration Platform–Submerged Production Unit for Large Subsea Plants. In Proceedings of the Offshore Technology Conference, Houston, TX, USA, 30 April–3 May 2018. [Google Scholar]
- NORSOK U-001:2021; Subsea Production Systems. NORSOK: Tingvoll, Norway, 2021.
- Wu, J.; Muthanna, C.; Alsos, H.; Juhlin, R.; Karunakaran, D. Experimental Investigation of Over-Trawlability of an Innovative Arctic Subsea Production Unit (SPU). In Proceedings of the ASME 2019 38th International Conference on Ocean, Offshore and Arctic Engineering, Glasgow, Scotland, 9–14 June 2019. [Google Scholar]
- Finn, S.; Marie, S.-S. Norwegian Contractors. 2020. Available online: https://snl.no/Norwegian_Contractors (accessed on 21 May 2023).
- Sandberg, F.H. Condeeps. The Dinosaurs of the North Sea. J. Energy Hist./Rev. D’histoire L’énergie 2019, 2, 1l–15l. [Google Scholar]
- Sandberg, F.H. Ekofisk-Tanken–et Ikon Som Blir Stående. 2019. Available online: https://ekofisk.industriminne.no/nb/ekofisk-tanken-et-ikon-som-blir-staende/ (accessed on 21 May 2023).
- OLJEMUSEUM, N. Ekofisk 2/4 T. Available online: https://ekofisk.industriminne.no/nb/ekofisk-24-t/ (accessed on 21 May 2023).
- Petroleumstilsynet. Investigation of Overpressurisation in Sludge Cell 11 on Statfjord A on 26 November 2019; Petroleumstilsynet: Stavanger, Norway, 2020.
- The Statfjord Area. 2023. Available online: https://www.equinor.com/energy/statfjord (accessed on 22 May 2023).
- Andrei, M. Troll A–The Tallest Structure Ever Moved by Mankind. 2015. Available online: https://www.zmescience.com/other/offbeat-other/tallest-structure/ (accessed on 22 May 2023).
- Concrete for Deep Ocean Construction. Concrete Construction. 1983. Available online: https://www.concreteconstruction.net/how-to/materials/concrete-for-deep-ocean-construction_o (accessed on 11 December 2024).
- Haynes, H.H.; Rail, R.D. Handbook for Design Of Undersea, Pressure-Resistant Concrete Structures; Naval Civil Engineering Laboratory: Port Hueneme, CA, USA, 1986. [Google Scholar]
- Petroleum Safety Authority Norway. Ageing of Offshore Concrete Structures; Petroleum Safety Authority Norway: Stavanger, Norway, 2009.
- Young, W.C.; Budynas, R.G. Roark’s Formulas for Stress and Strain, 7th ed.; McGraw-Hill: New York, NY, USA, 2002. [Google Scholar]
- European Committee for Standardization. Eurocode 4-Design of composite steel and concrete structures. In Part 1–2: General Rules-Structural Fire Design; European Committee for Standardization: Brussels, Belgium, 2014. [Google Scholar]
- DNV. DNV-ST-C502 Offshore Concrete Structures; DNV: Høvik, Norway, 2021. [Google Scholar]


| Ekofisk Tank | Troll A | Statfjord A | Ref. | |
|---|---|---|---|---|
| Total storage capacity, [m3] | 160,000 | 206,000 | 288,000 | [35,36,37] |
| Max. Water depth [m] | 70 | 300 | 150 | [32,35] |
| Under-pressure condition [m] | - 1 | 50 2 | 50 | [36] |
| Height of cell/tank [m] | 70 | 70 | 70 | [36,38] |
| Aver. water depth to center of tank 3, [m] | 35 | 215 | 65 | |
| Round trip efficiency, [-] | 0.8 | 0.8 | 0.8 | |
| Energy potential, [MWh] | 12.5 | 138.4 | 41.8 | |
| Estimated value [$/kWh] | $0.1 | $0.1 | $0.1 | |
| Discharge freq. [cycles/day] | 2 | 2 | 2 | |
| Gross value electricity/day [$] | $2503 | $27,672 | $8366 | |
| Gross value electricity/year [$] | $0.9M | $10M | $3M | |
| Gross value electricity/20 years [$] | $18M | $202M | $61M |
| Concrete | C65 | C75 | C85 |
|---|---|---|---|
| Cost [$/tonne] | 132.9 | 153.3 | 194.2 |
| Composite Buoyancy | Lowest Cost |
|---|---|
| Cost [$/kg uplift] | 4 |
| Parameter | Value | Description |
|---|---|---|
| Cylinder compressive strength for three different concrete grades: C65, C75 and C85 [44]. | ||
| Density of seawater. | ||
| Density of concrete, including rebar. | ||
| General safety factor, chosen according to a value between NCEL and ORES numbers in Table 2. | ||
| Initial pressure in tank. Assumed to be atmospheric pressure. | ||
| 0.8 | Assumed roundtrip efficiency. |
| Concrete Type | Lowest Cost [M$/MWh] | Corresponding Water Depth [m] |
|---|---|---|
| B65 | 0.153 | 710 |
| B75 | 0.152 | 820 |
| B85 | 0.150 | 930 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Juhlin, R.; Slocum, A.H.; Assadi, M. Deep Water Subsea Energy Storage, Lessons Learned from the Offshore Oil and Gas Industry. J. Mar. Sci. Eng. 2024, 12, 2288. https://doi.org/10.3390/jmse12122288
Juhlin R, Slocum AH, Assadi M. Deep Water Subsea Energy Storage, Lessons Learned from the Offshore Oil and Gas Industry. Journal of Marine Science and Engineering. 2024; 12(12):2288. https://doi.org/10.3390/jmse12122288
Chicago/Turabian StyleJuhlin, Rasmus, Alexander H. Slocum, and Mohsen Assadi. 2024. "Deep Water Subsea Energy Storage, Lessons Learned from the Offshore Oil and Gas Industry" Journal of Marine Science and Engineering 12, no. 12: 2288. https://doi.org/10.3390/jmse12122288
APA StyleJuhlin, R., Slocum, A. H., & Assadi, M. (2024). Deep Water Subsea Energy Storage, Lessons Learned from the Offshore Oil and Gas Industry. Journal of Marine Science and Engineering, 12(12), 2288. https://doi.org/10.3390/jmse12122288