
Research on the Differential Model-Free Adaptive Mooring Control Method for Uncrewed Wave Gliders

Abstract
1. Introduction
- Differential Model-Free Adaptive Control Method for Float Heading: Addressing the strong nonlinear coupling and time-delay issues in the heading control of UWG floats, we propose a differential model-free adaptive control method. Establishing a new criterion function makes the heading control subsystem match the dynamic speed change in MFAC and demonstrates good disturbance resistance.
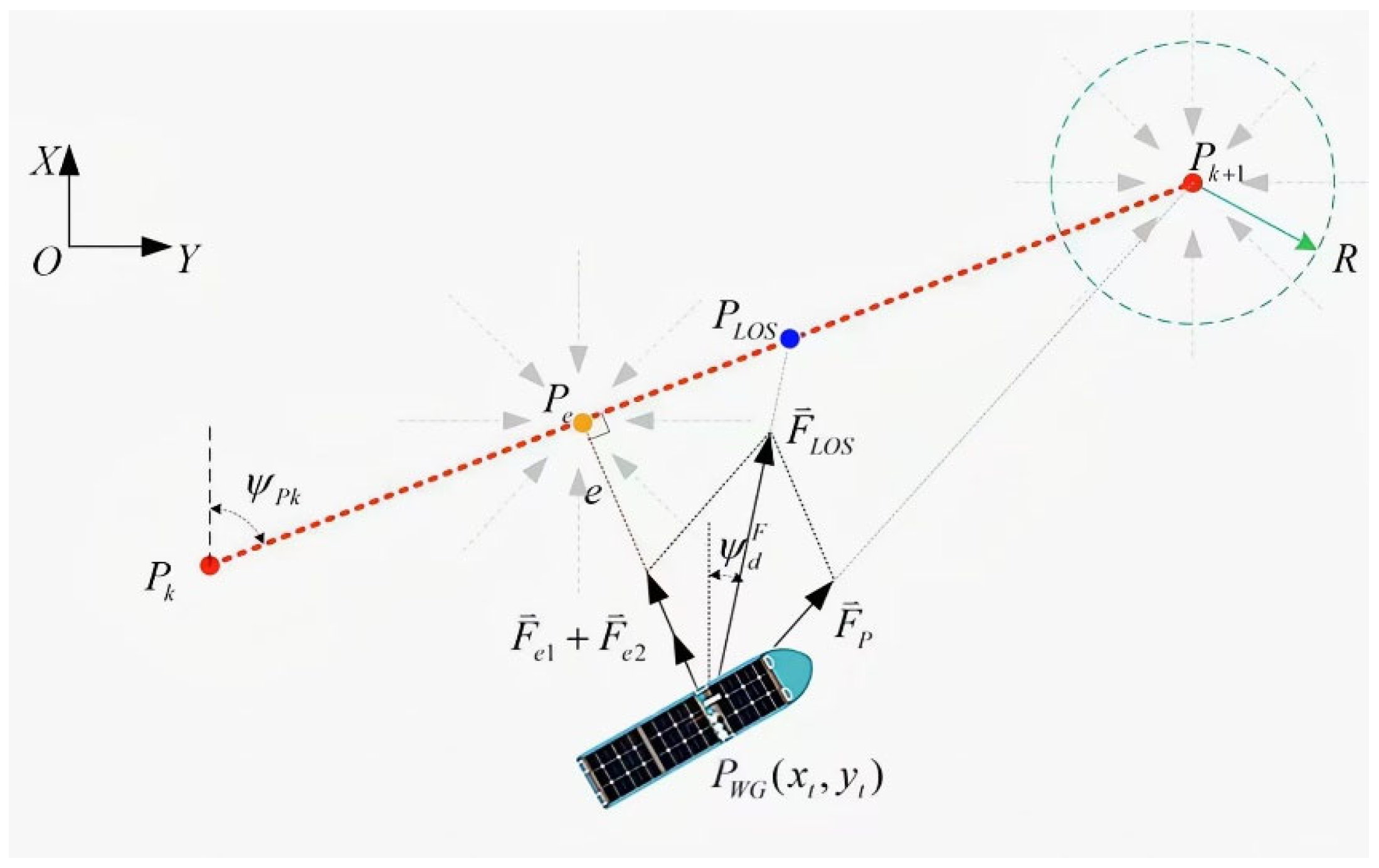
- Improved Gravitational Vector LOS Guidance Strategy for UWGs: For UWGs with limited maneuverability and significant susceptibility to ocean currents, we developed an improved gravitational vector LOS guidance strategy. This strategy involves setting different gravitational terms along the path and updating the integral terms under various conditions. This ensures that the UWG can stably follow the designated path and reach the mooring point. During the mooring process, gravitational forces are only present at the mooring point with energy conservation in mind, and conditions for the presence of gravitational forces are set to ensure the smooth completion of mooring control while achieving energy savings.
2. Mathematical Modeling and Theoretical Foundations
2.1. Mathematical Modeling
2.2. MFAC Theory
3. Design of Mooring Control Scheme for UWG
3.1. Design of Heading Controller for Wave Glider Float
3.2. Design of IAFLOS Mooring Control Scheme
| Algorithm 1: IAFLOS Mooring Guidance Strategy |
| Given: , , |
| , maximum deviation threshold, switching radius , |
| Repeat |
| // whether the distance from the mooring point is too far. |
| , , |
| else close the rudder |
| end |
| // whether the target path point has been reached. |
| during path switching. |
| // whether the lateral tracking error exceeds the maximum deviation threshold. |
| // whether the system has experienced overshoot. |
| , , |
| // when the system experiences overshoot, amplify the accumulation of the reverse error. |
| end |
| else |
| end |
| end |
| end |
4. Stability Analysis
4.1. Conclusion 1 Proof
4.2. Conclusion 2 Proof
5. Simulation
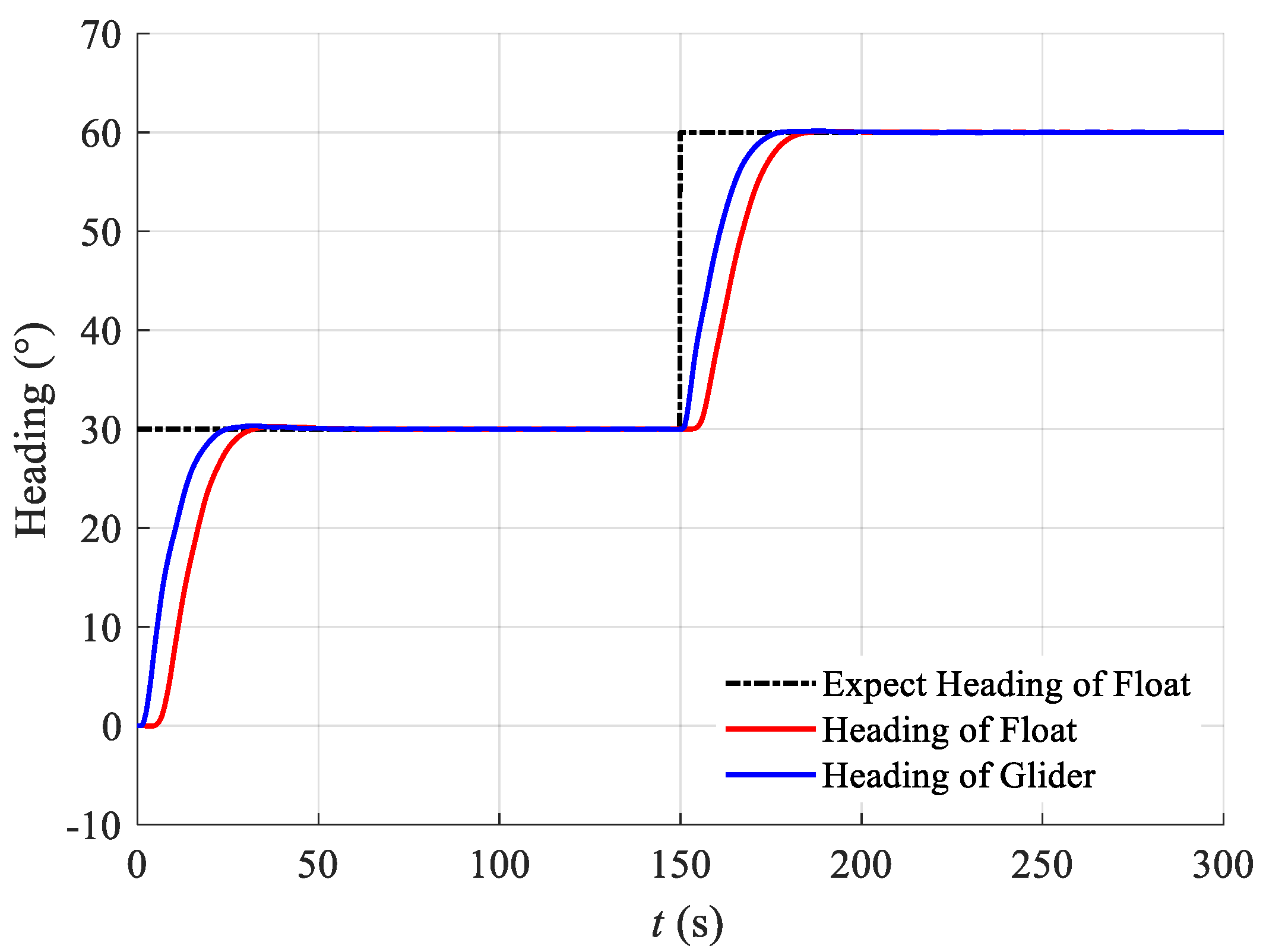
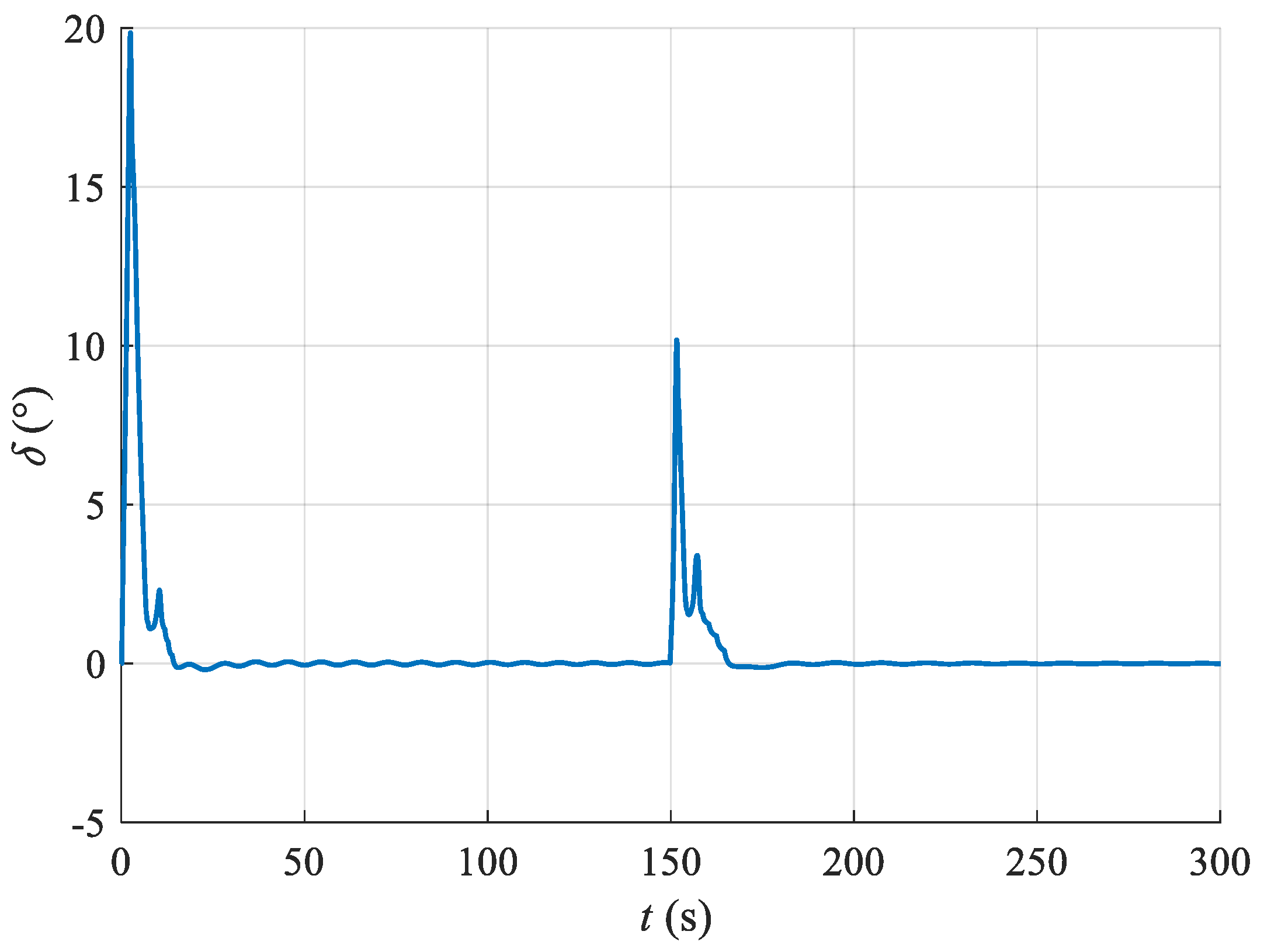
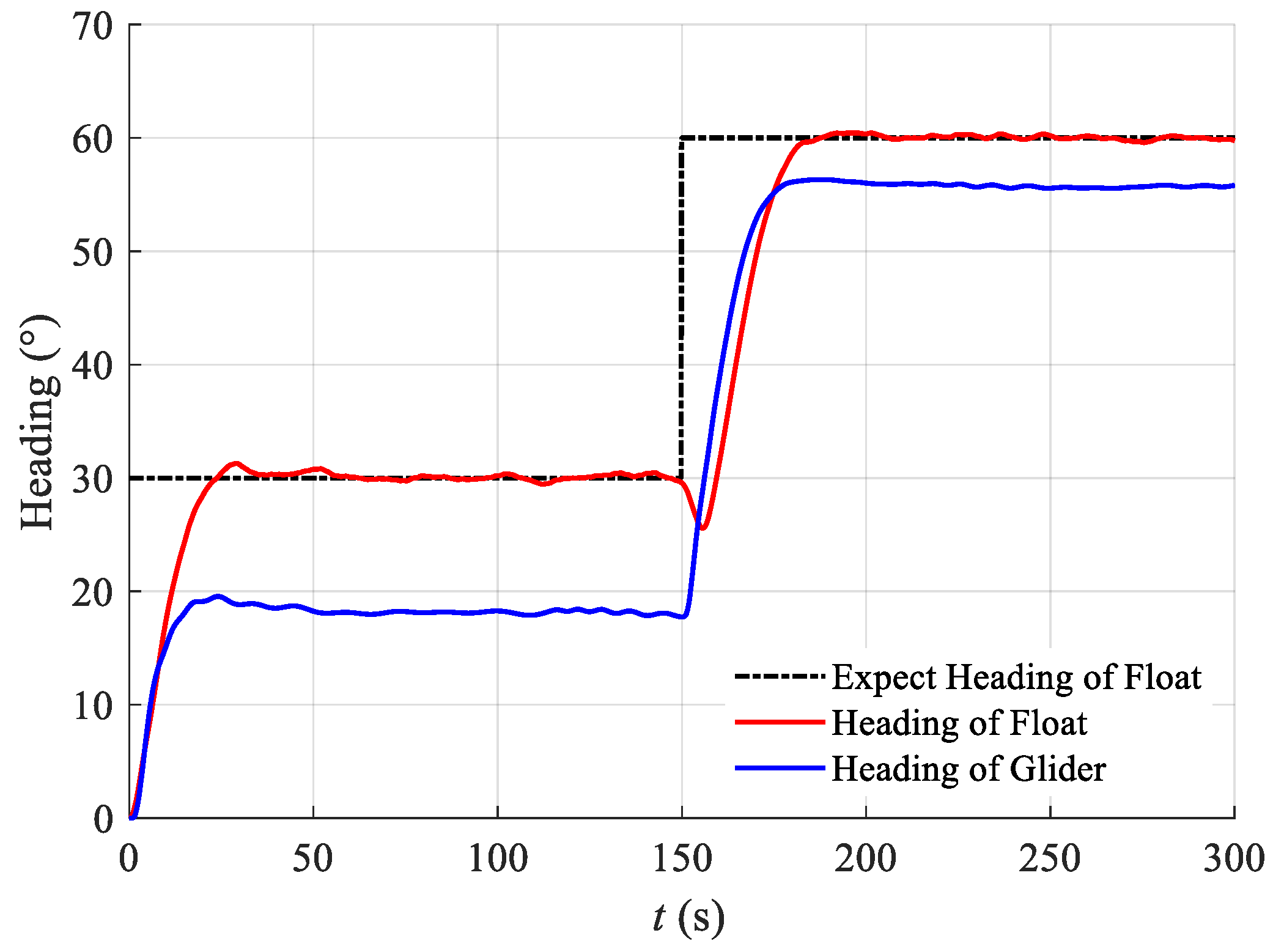
5.1. Float Heading Control Simulation
5.2. Wave Glider Mooring Control Simulation
6. Conclusions
- (1)
- Due to the presence of many unknown nonlinear terms and time delay terms in the UWG floater heading control system, MFAC cannot be directly applied to the floater heading control system. Therefore, this paper introduces differential terms into the criterion function and designed the DMFAC floater heading control method, proving the stability of the control algorithm. This allows the heading control subsystem to match the dynamic change speed of MFAC, solving the problems of oscillation and non-convergence in standard MFAC methods for UWG heading control.
- (2)
- The simulations demonstrated that the designed UWG heading control method can achieve good stability while also exhibiting strong disturbance resistance. The simulation results show that under simulated Beaufort scale 2 sea conditions, in the absence of disturbances, the final heading control error is within 0.1°, and with disturbances applied, the UWG heading control fluctuates within 0.6°, reflecting the excellent disturbance resistance of the heading control system.
- (3)
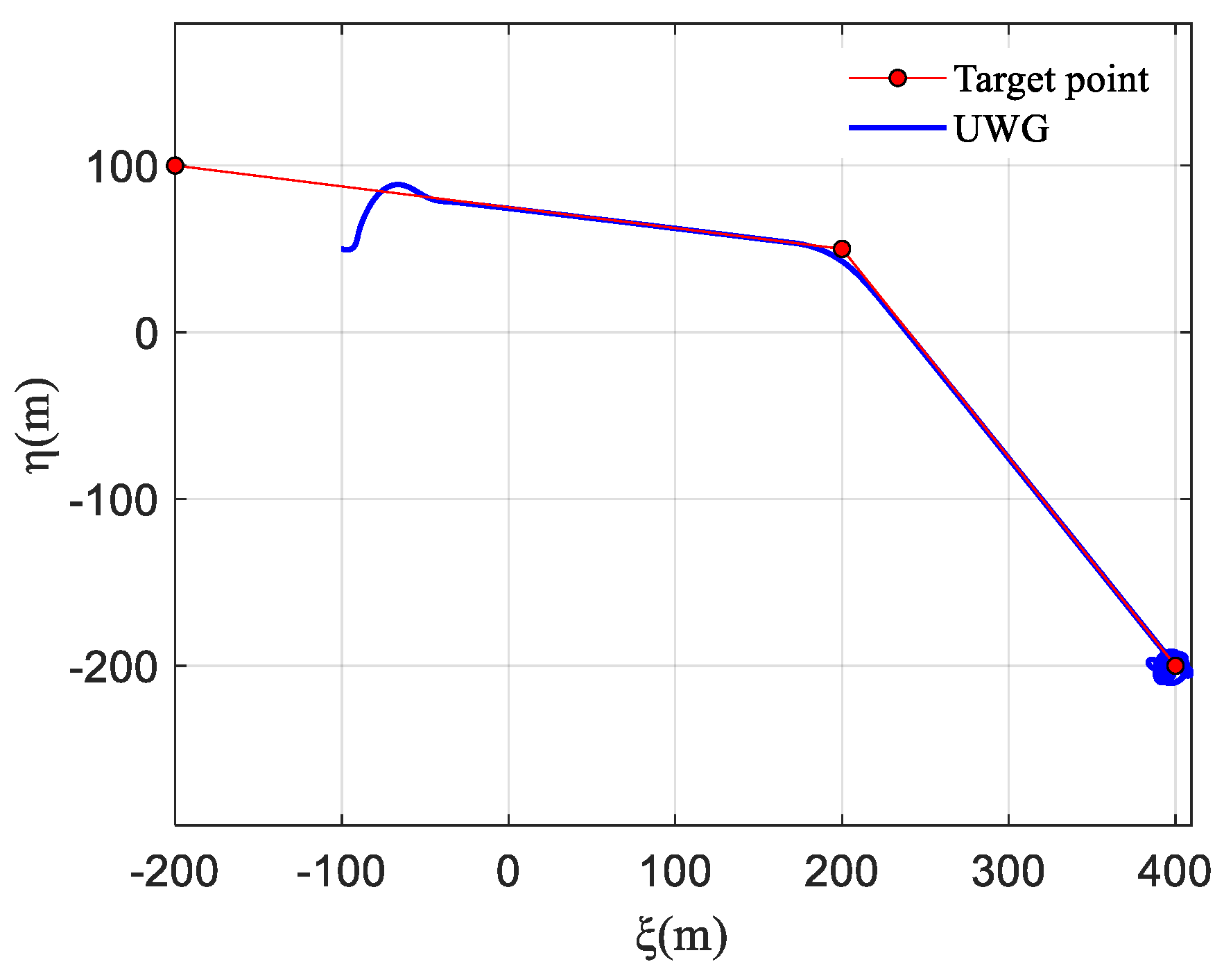
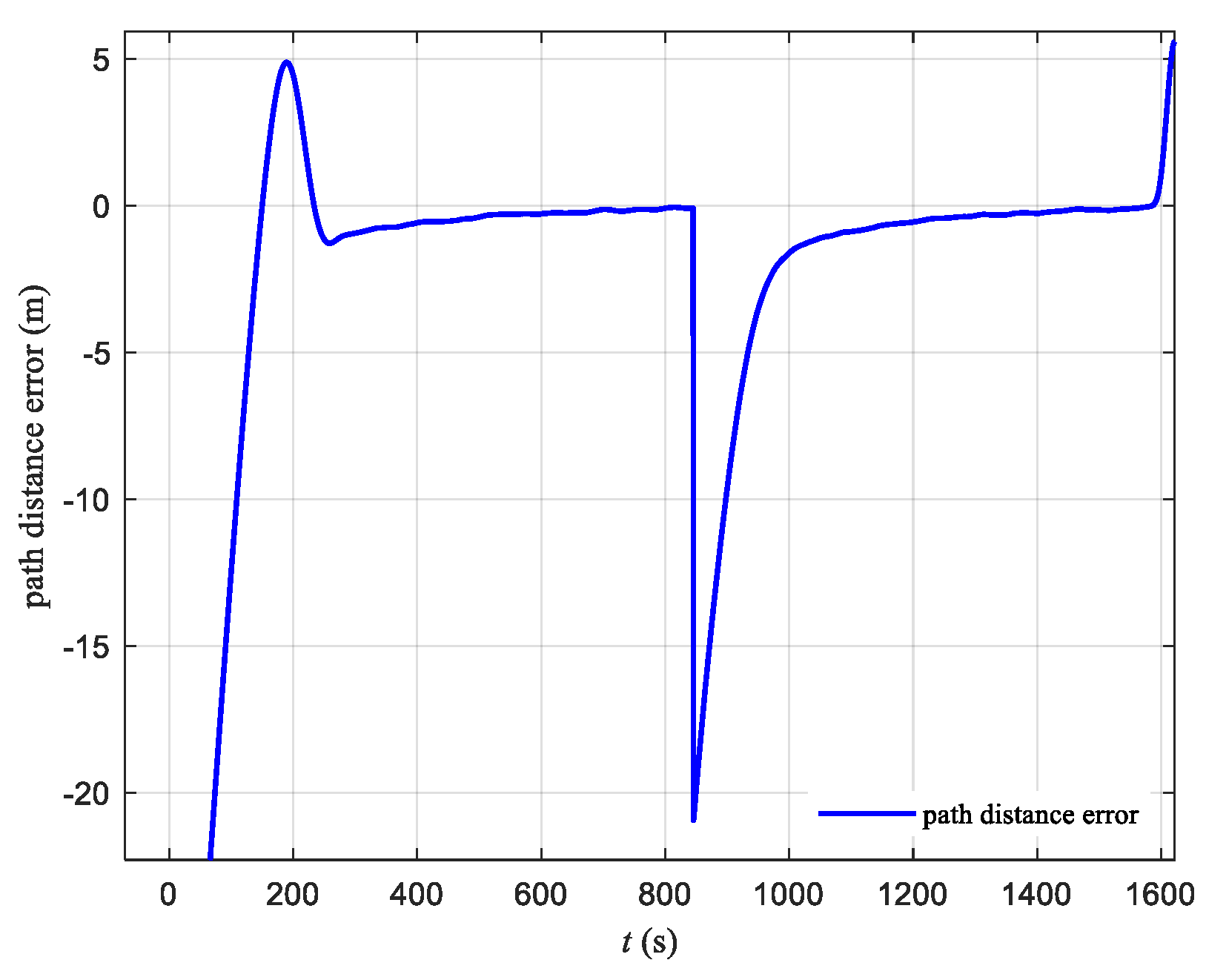
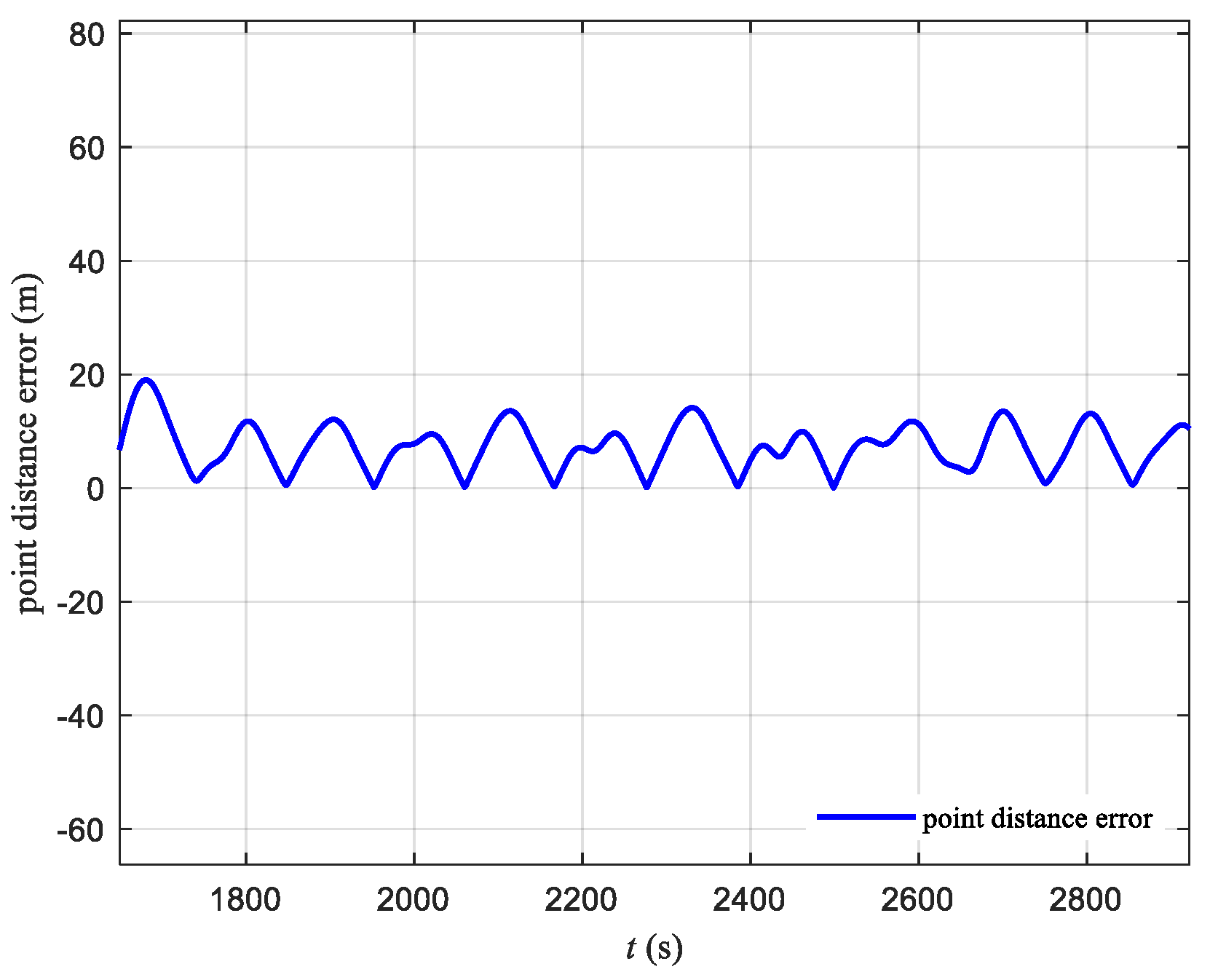
- Considering that a UWG, as a vehicle with weak maneuverability and significant wave influence, may experience control failure when using LOS for path-following control, the IAFLOS path-following and mooring control strategies were designed. The aim was to ensure the successful completion of the mooring process without failure by designing different attractive force terms, while also reducing control overshoot.
- (4)
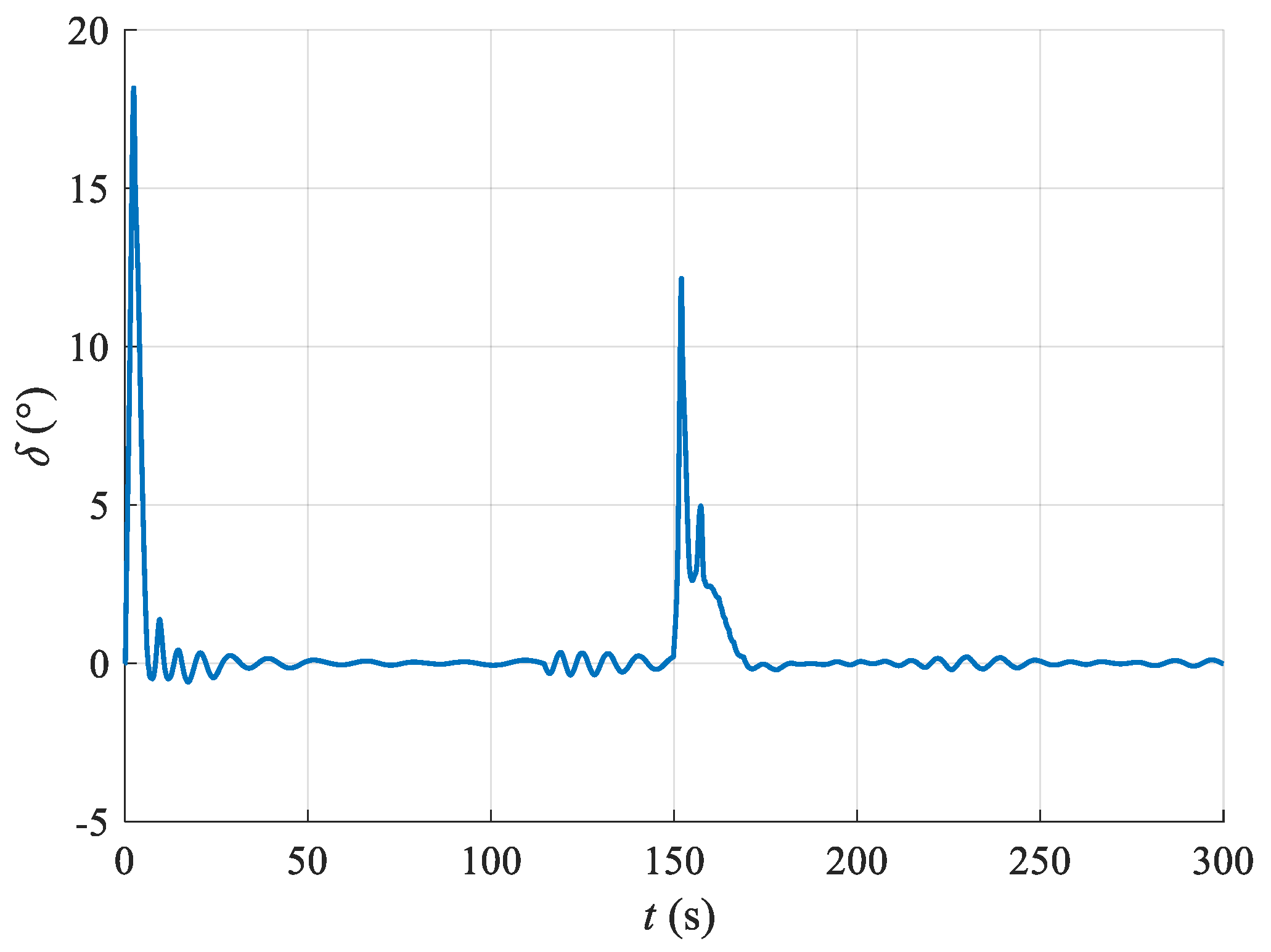
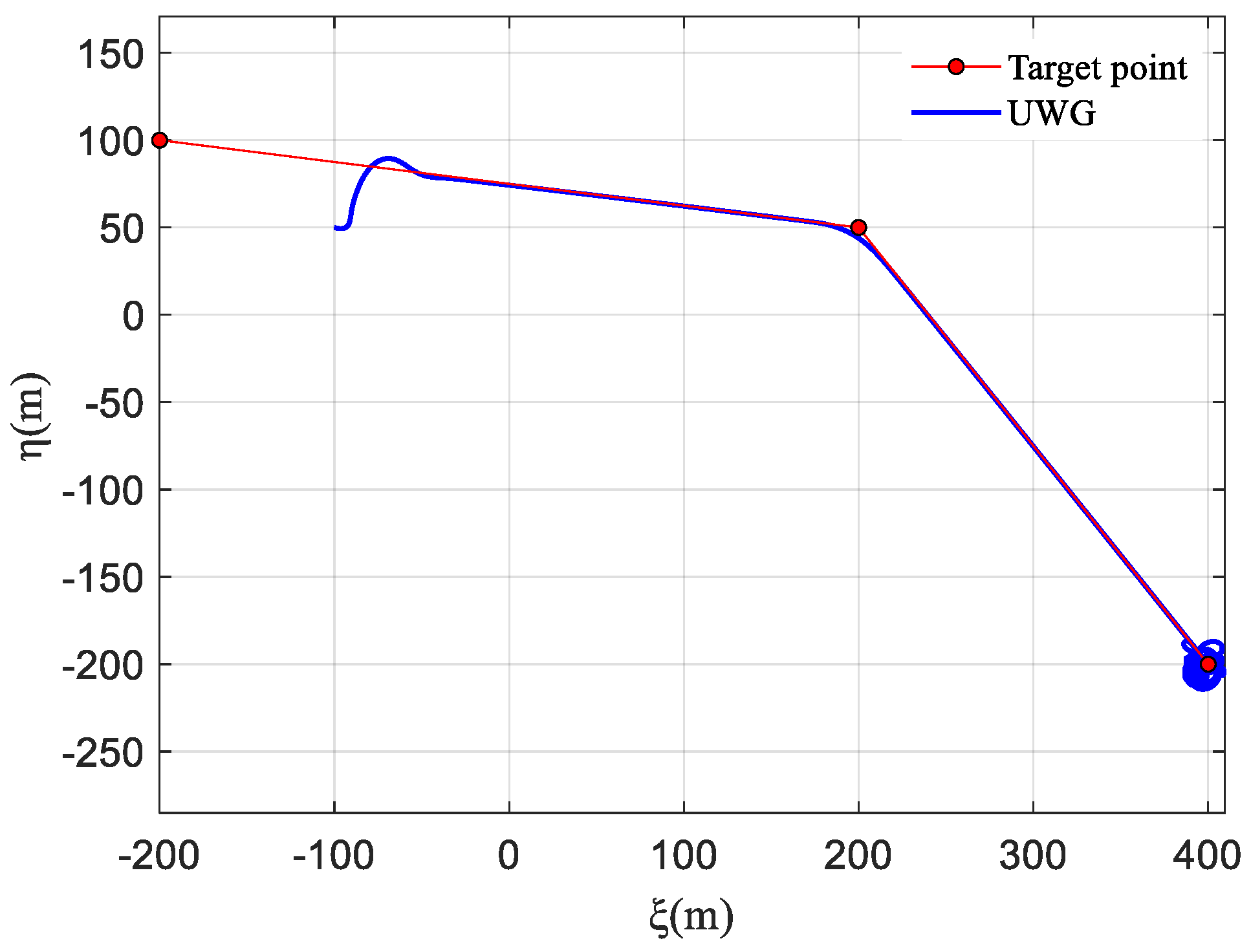
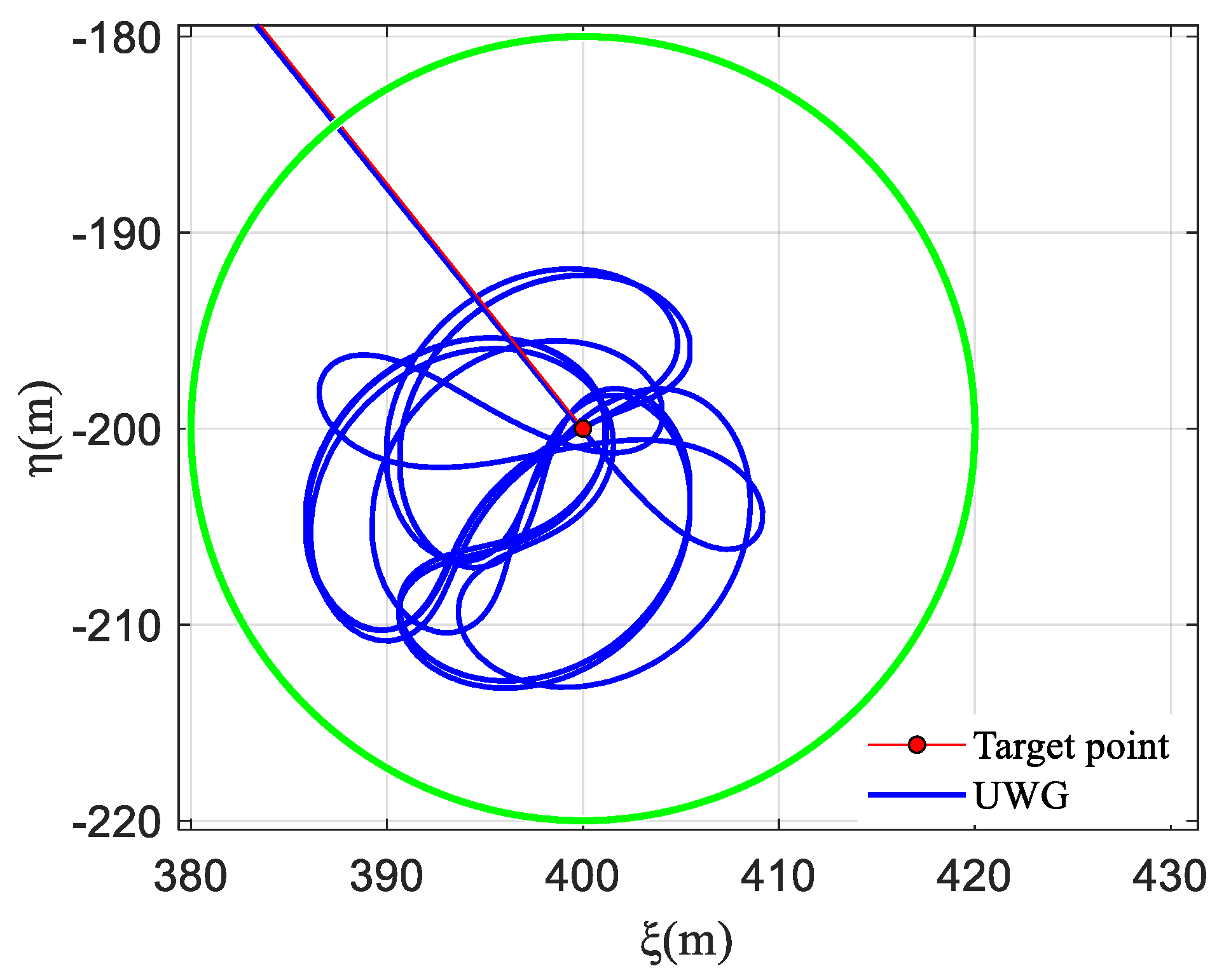
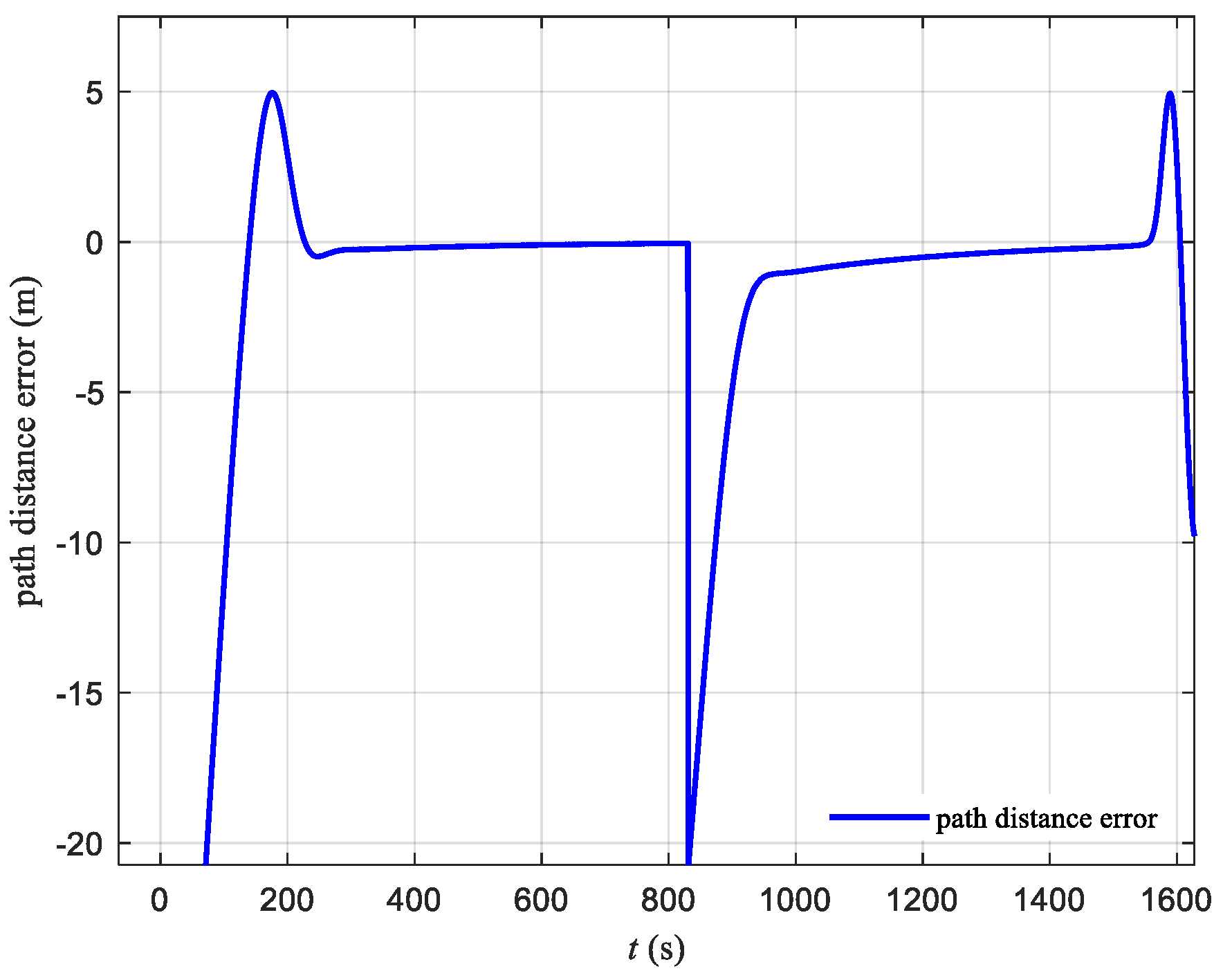
- The simulation verified that the designed mooring control strategy can achieve good path-following and mooring control under Beaufort scale 2 sea conditions. Without disturbances, the maximum overshoot is 4.95 m, and after stabilization, the path oscillation is almost 0. With disturbances applied, the maximum overshoot is 5.03 m, and after stabilization, the path oscillation is within 0.1 m. During the mooring phase, whether with or without disturbances, the maximum distance from the mooring point is controlled within 20 m, meeting the requirements of the mooring control task.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Manley, J.; Willcox, S. The Wave Glider: A New Concept for Deploying Ocean Instrumentation. IEEE Instrum. Meas. Mag. 2010, 13, 8–13. [Google Scholar] [CrossRef]
- Zhou, H.; Xu, H.; Cao, J.; Fu, J.; Mao, Z.; Zeng, Z.; Yao, B.; Lian, L. Robust Adaptive Control of Underwater Glider for Bottom Sitting-Oriented Soft Landing. Ocean Eng. 2024, 293, 116725. [Google Scholar] [CrossRef]
- Bi, Y.; Jin, Y.; Zhou, H.; Bai, Y.; Lyu, C.; Zeng, Z.; Lian, L. Surfing Algorithm: Agile and Safe Transition Strategy for Hybrid Aerial Underwater Vehicle in Waves. IEEE Trans. Robot. 2023, 39, 4262–4278. [Google Scholar] [CrossRef]
- Thomson, J.; Girton, J.B.; Jha, R.; Trapani, A. Measurements of Directional Wave Spectra and Wind Stress from a Wave Glider Autonomous Surface Vehicle. J. Atmos. Ocean. Technol. 2018, 35, 347–363. [Google Scholar] [CrossRef]
- Fu, J.; Zhou, H.; Zhang, X.; Wen, H.; Yao, B.; Lian, L. A Unified Switching Dynamic Modeling of Multi-Mode Underwater Vehicle. Ocean Eng. 2023, 278, 114359. [Google Scholar] [CrossRef]
- Li, Y.; Pan, K.; Liao, Y.; Zhang, W.; Wang, L. Improved Active Disturbance Rejection Heading Control for Unmanned Wave Glider. Appl. Ocean Res. 2021, 106, 102438. [Google Scholar] [CrossRef]
- Berger, J.; Laske, G.; Babcock, J.; Orcutt, J. An Ocean Bottom Seismic Observatory with near Real-Time Telemetry. Earth Space Sci. 2016, 3, 68–77. [Google Scholar] [CrossRef]
- Mitarai, S.; McWilliams, J.C. Wave Glider Observations of Surface Winds and Currents in the Core of Typhoon Danas. Geophys. Res. Lett. 2016, 43, 11312–11319. [Google Scholar] [CrossRef]
- Peng, Z.; Li, J.; Han, B.; Gu, N. Safety-Certificated Line-of-Sight Guidance of Unmanned Surface Vehicles for Straight-Line Following in a Constrained Water Region Subject to Ocean Currents. J. Mar. Sci. Appl. 2023, 22, 602–613. [Google Scholar] [CrossRef]
- Abrougui, H.; Nejim, S. Autopilot Design for an Unmanned Surface Vehicle Based on Backstepping Integral Technique with Experimental Results. J. Mar. Sci. Appl. 2023, 22, 614–623. [Google Scholar] [CrossRef]
- Zhou, H.; Cao, J.; Fu, J.; Zeng, Z.; Yao, B.; Mao, Z.; Lian, L. Swift: Transition Characterization and Motion Analysis of a Multimodal Underwater Vehicle. IEEE Robot. Autom. Lett. 2024, 9, 1692–1699. [Google Scholar] [CrossRef]
- Wang, P.; Wang, D.; Zhang, X.; Guo, X.; Li, X.; Tian, X. Path Following Control of the Wave Glider in Waves and Currents. Ocean Eng. 2019, 193, 106578. [Google Scholar] [CrossRef]
- Li, Y.; Pan, K.; Liao, Y.; Zhang, W.; Wang, L. Dynamics Modeling and Experiments of Wave Driven Robot. Appl. Math. Model. 2020, 79, 451–468. [Google Scholar] [CrossRef]
- Shi, Y.; Shen, C.; Fang, H.; Li, H. Advanced Control in Marine Mechatronic Systems: A Survey. IEEE-ASME Trans. Mechatron. 2017, 22, 1121–1131. [Google Scholar] [CrossRef]
- Yuan, J.; Zhang, W.; Liu, H.; Li, H. Heading and Speed Joint Control of Double-Push Usv Based on Fuzzy Pid. Int. J. Robot. Autom. 2023, 38, 32–41. [Google Scholar] [CrossRef]
- Shin, H.; Baek, S.; Song, Y. Multidimensional Beam Optimization in Underwater Optical Wireless Communication Based on Deep Reinforcement Learning. IEEE Internet Things J. 2024, 11, 28623–28634. [Google Scholar] [CrossRef]
- Wu, C.; Yu, W.; Liao, W.; Ou, Y. Deep Reinforcement Learning with Intrinsic Curiosity Module Based Trajectory Tracking Control for USV. Ocean Eng. 2024, 308, 118342. [Google Scholar] [CrossRef]
- Zhang, X.; Zhou, H.; Fu, J.; Wen, H.; Yao, B.; Lian, L. Adaptive Integral Terminal Sliding Mode Based Trajectory Tracking Control of Underwater Glider. Ocean Eng. 2023, 269, 113436. [Google Scholar] [CrossRef]
- Jia, Q.; Liao, Y.; Xu, P.; Pang, S.; Wang, B.; Li, Y. Modeling Analysis and Experiment for Energy System of Ocean Energy Driven Unmanned Marine Vehicle: The Yulang II Case Study. J. Field Robot. 2024, 41, 735–765. [Google Scholar] [CrossRef]
- Zhang, J.; Zhang, W.; Tong, S. Adaptive Neural Optimal Tracking Control for Uncertain Unmanned Surface Vehicle. Ocean Eng. 2024, 312, 119031. [Google Scholar] [CrossRef]
- Lei, T.; Wen, Y.; Yu, Y.; Tian, K.; Zhu, M. Predictive Trajectory Tracking Control for the USV in Networked Environments with Communication Constraints. Ocean Eng. 2024, 298, 117185. [Google Scholar] [CrossRef]
- Fan, Y.; Qiu, B.; Liu, L.; Yang, Y. Global Fixed-Time Trajectory Tracking Control of Underactuated USV Based on Fixed-Time Extended State Observer. ISA Trans. 2023, 132, 267–277. [Google Scholar] [CrossRef] [PubMed]
- Chen, C.; Liao, Y.; Tang, X.; Sun, J.; Gu, J.; Li, H.; Ren, Z.; Zhai, Z.; Li, Y.; Wang, B.; et al. Research on double-USVs fuzzy-priority NSB behavior fusion formation control method for oil spill recovery. J. Field Robot. 2024, 41, 1–25. [Google Scholar] [CrossRef]
- Liao, Y.; Chen, C.; Du, T.; Sun, J.; Xin, Y.; Zhai, Z.; Wang, B.; Li, Y.; Pang, S. Research on disturbance rejection motion control method of USV for UUV recovery. J. Field Robot. 2023, 40, 574–594. [Google Scholar] [CrossRef]
- Yu, P.; Zhou, Y.; Sun, X.; Sang, H.; Zhang, S. Adaptive Path Following Control for Wave Gliders in Ocean Currents and Waves. Ocean Eng. 2023, 284, 115251. [Google Scholar] [CrossRef]
- Zhang, S.; Sang, H.; Sun, X.; Liu, F.; Zhou, Y.; Yu, P. Research on Path Following Control System of Wave Gliders Based on Maneuverability Demand Estimator. Ocean Eng. 2023, 287, 115932. [Google Scholar] [CrossRef]
- Qi, Z.; Wang, B.; Qin, Y.; Shi, J.; Zhai, J. Planar Path Following Control for Wave Glider and Experimental Study. J. Coast. Res. 2020, 99, 16–20. [Google Scholar] [CrossRef]
- Zhang, S.; Sang, H.; Sun, X.; Liu, F.; Zhou, Y.; Yu, P. Research on the Maneuverability and Path Following Control of the Wave Glider with a Propeller-Rudder System. Ocean Eng. 2023, 278, 114346. [Google Scholar] [CrossRef]
- Liu, R.; Tian, X.; Wang, P.; Liao, N.; Huang, R.; Xu, H.; Wang, F. Experimental-Based Hydrodynamic Simulation of Submarine Glider for Wave Gliders. Appl. Ocean Res. 2024, 153, 104224. [Google Scholar] [CrossRef]
- Wang, P.; Tian, X.; Lu, W.; Hu, Z.; Luo, Y. Dynamic Modeling and Simulations of the Wave Glider. Appl. Math. Model. 2019, 66, 77–96. [Google Scholar] [CrossRef]
- Hou, Z.; Jin, S. A Novel Data-Driven Control Approach for a Class of Discrete-Time Nonlinear Systems. IEEE Trans. Control Syst. Technol. 2011, 19, 1549–1558. [Google Scholar] [CrossRef]
- Hou, Z.; Chi, R.; Gao, H. An Overview of Dynamic-Linearization-Based Data-Driven Control and Applications. IEEE Trans. Ind. Electron. 2017, 64, 4076–4090. [Google Scholar] [CrossRef]
- Hou, Z.; Jin, S. Data-Driven Model-Free Adaptive Control for a Class of MIMO Nonlinear Discrete-Time Systems. IEEE Trans. Neural Netw. 2011, 22, 2173–2188. [Google Scholar] [PubMed]
- Hou, Z.; Jin, S. Model Free Adaptive Control: Theory and Applications; CRC Press: Boca Raton, FL, USA; Taylor & Francis Group: Oxfordshire, UK, 2013. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Heading Overshoot | Maximum Heading Oscillation | Maximum Rudder Angle Oscillation | |
|---|---|---|---|
| With disturbance | / | 0.2° | 0.1° |
| Without disturbance | 1.1° | 0.5° | 0.2° |
| Maximum Path Overshoot | Maximum Distance from the Mooring Point | Average Path-Following Error | |
|---|---|---|---|
| With disturbances | 5.03 m | 19.50 m | 3.98 m |
| Without Disturbances | 4.95 m | 15.98 m | 4.24 m |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shi, J.; Xu, J.; Wei, T.; Liao, Y.; Pan, K.; Jiang, M.; Wu, X. Research on the Differential Model-Free Adaptive Mooring Control Method for Uncrewed Wave Gliders. J. Mar. Sci. Eng. 2024, 12, 2282. https://doi.org/10.3390/jmse12122282
Shi J, Xu J, Wei T, Liao Y, Pan K, Jiang M, Wu X. Research on the Differential Model-Free Adaptive Mooring Control Method for Uncrewed Wave Gliders. Journal of Marine Science and Engineering. 2024; 12(12):2282. https://doi.org/10.3390/jmse12122282
Chicago/Turabian StyleShi, Jian, Jiangning Xu, Tianyu Wei, Yulei Liao, Kaiwen Pan, Min Jiang, and Xiao Wu. 2024. "Research on the Differential Model-Free Adaptive Mooring Control Method for Uncrewed Wave Gliders" Journal of Marine Science and Engineering 12, no. 12: 2282. https://doi.org/10.3390/jmse12122282
APA StyleShi, J., Xu, J., Wei, T., Liao, Y., Pan, K., Jiang, M., & Wu, X. (2024). Research on the Differential Model-Free Adaptive Mooring Control Method for Uncrewed Wave Gliders. Journal of Marine Science and Engineering, 12(12), 2282. https://doi.org/10.3390/jmse12122282