

Comparison of Collision Avoidance Algorithms for Unmanned Surface Vehicle Through Free-Running Test: Collision Risk Index, Artificial Potential Field, and Safety Zone

 ,
,  ,
,
Abstract
1. Introduction
2. Materials and Methods
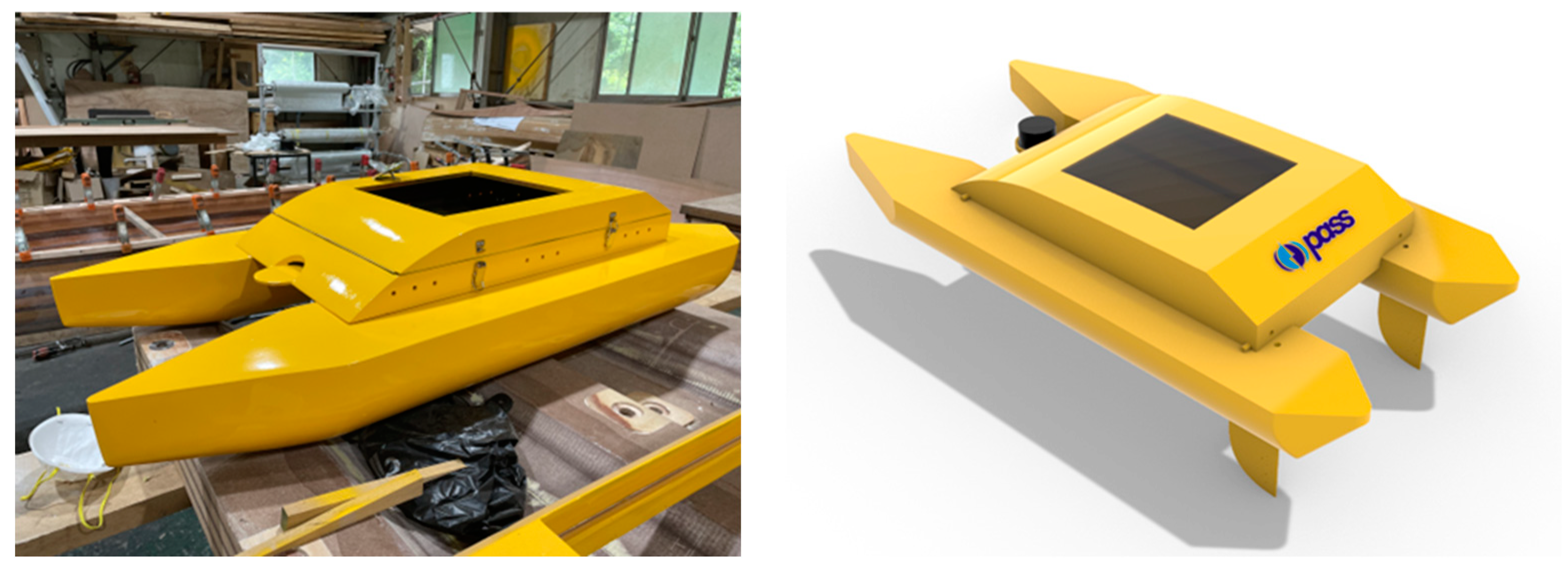
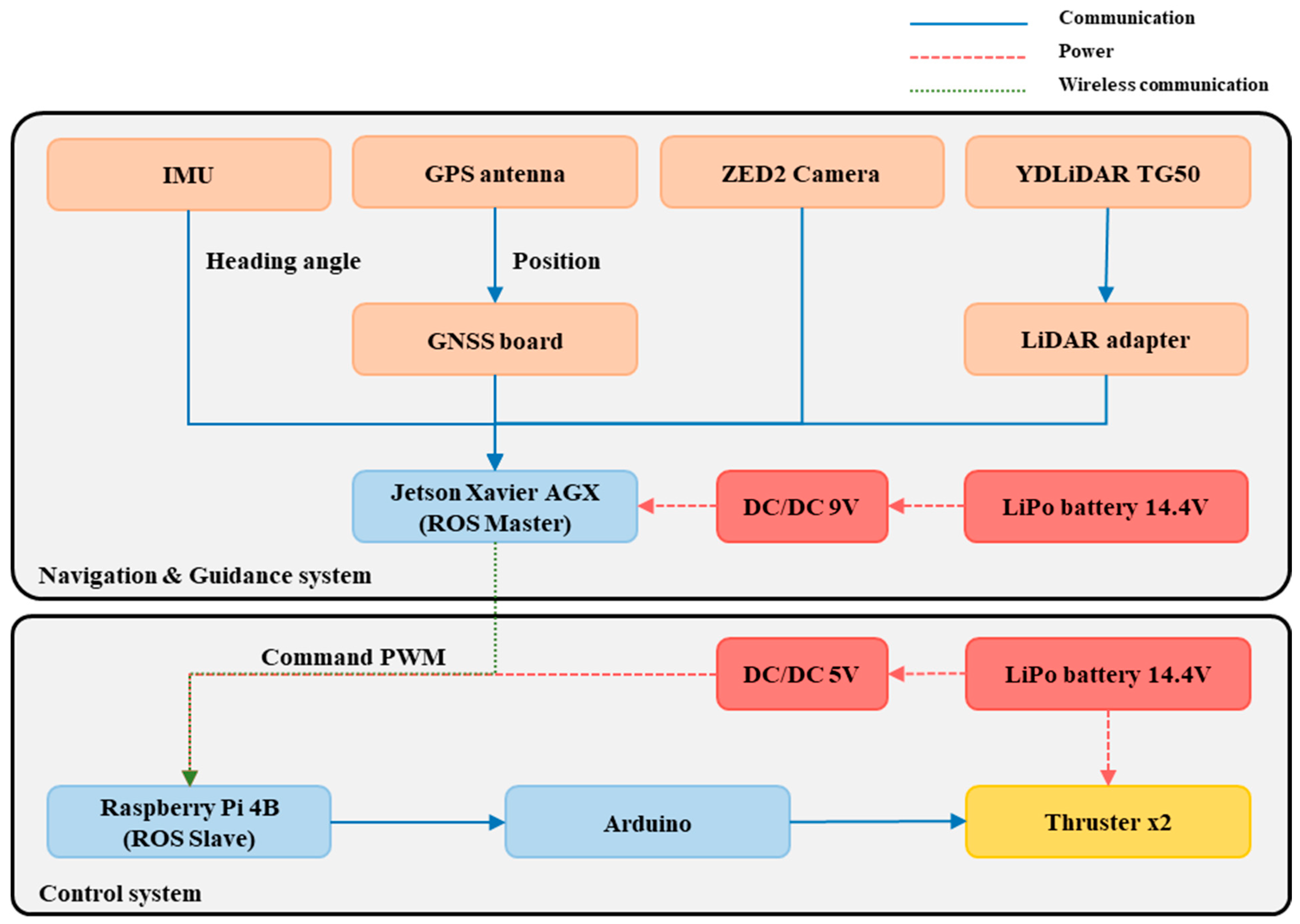
2.1. Hardware System
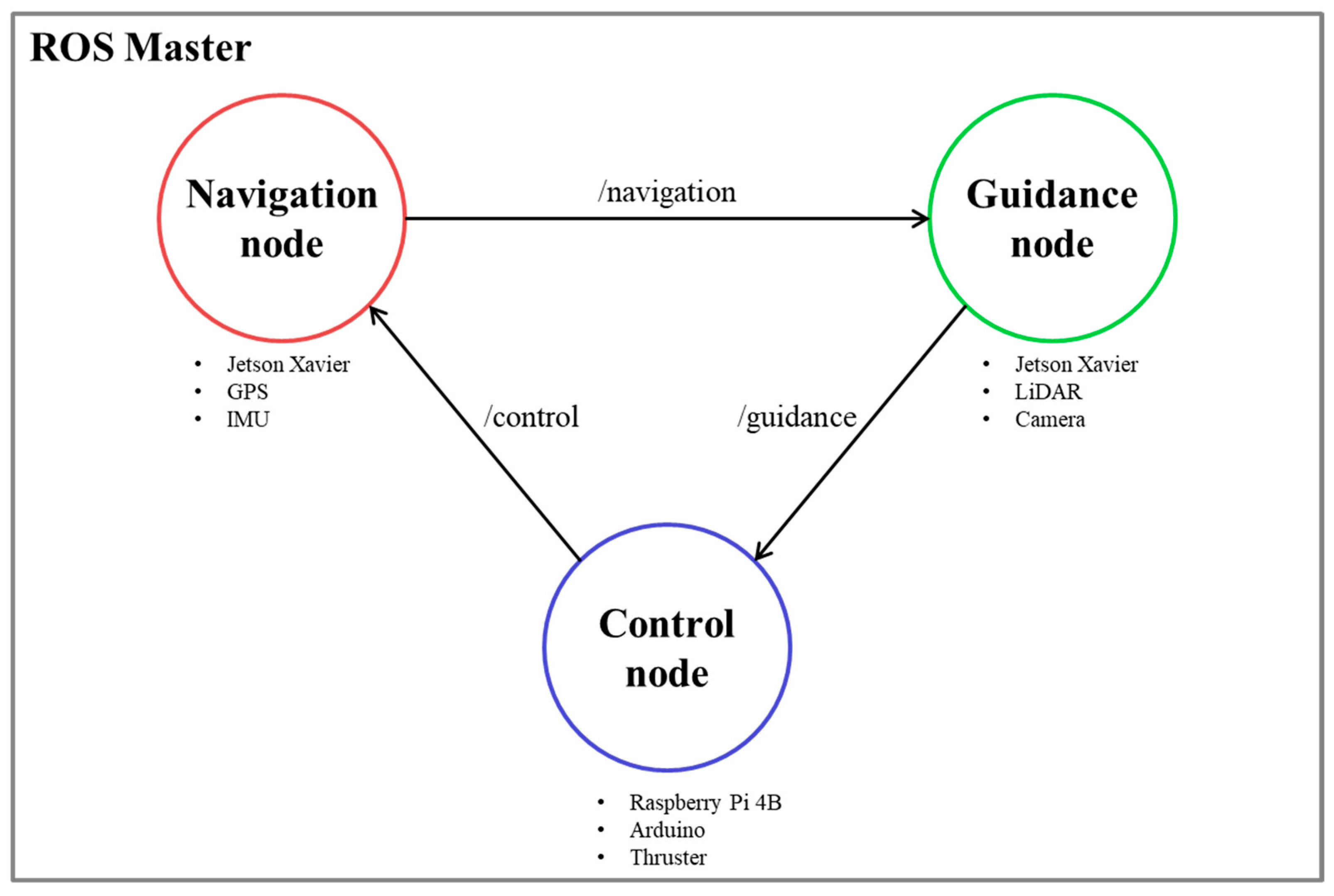
2.2. Software System
2.3. Collision Avoidance Algorithm
2.3.1. Guidance and Control Algorithm
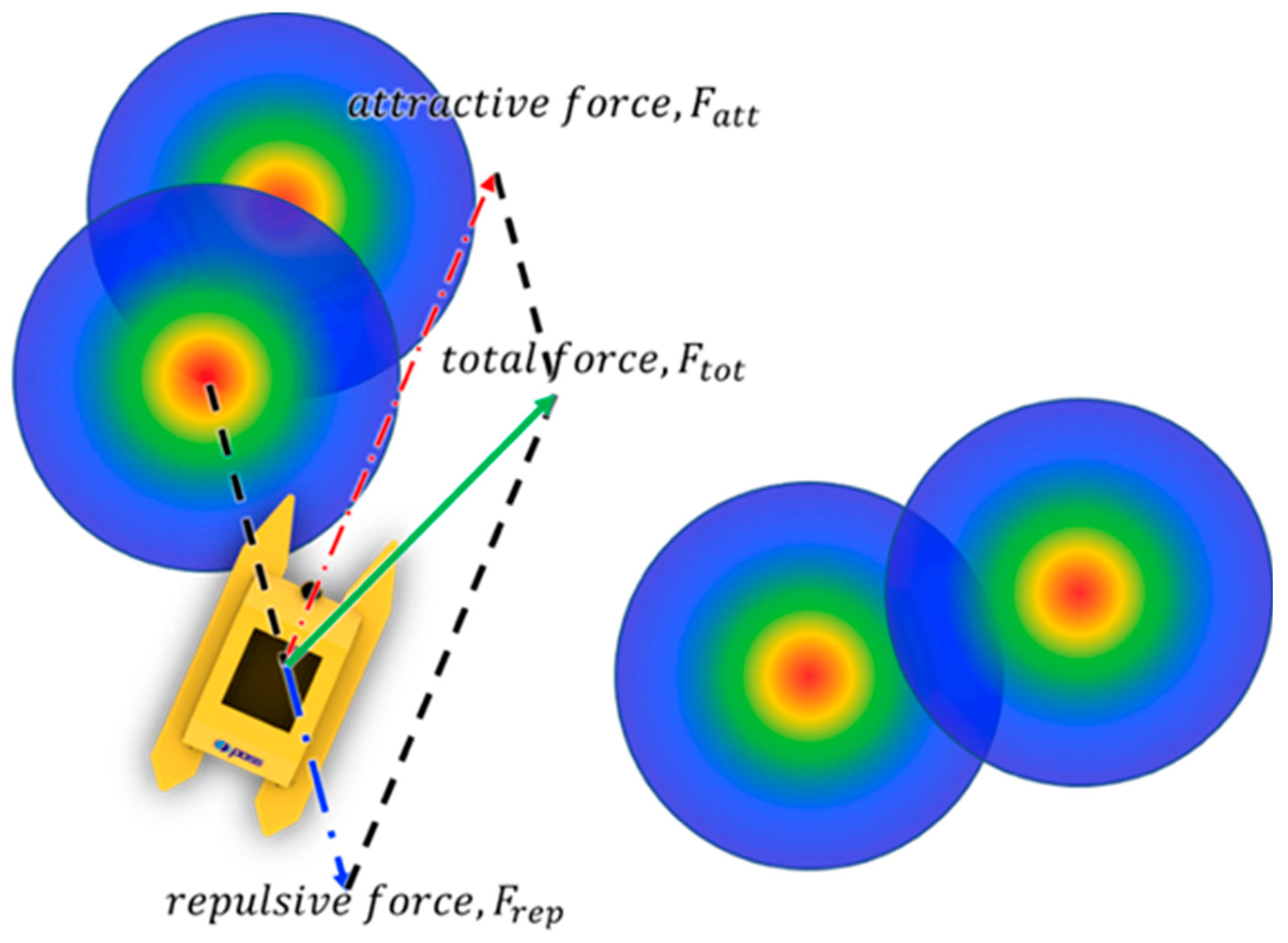
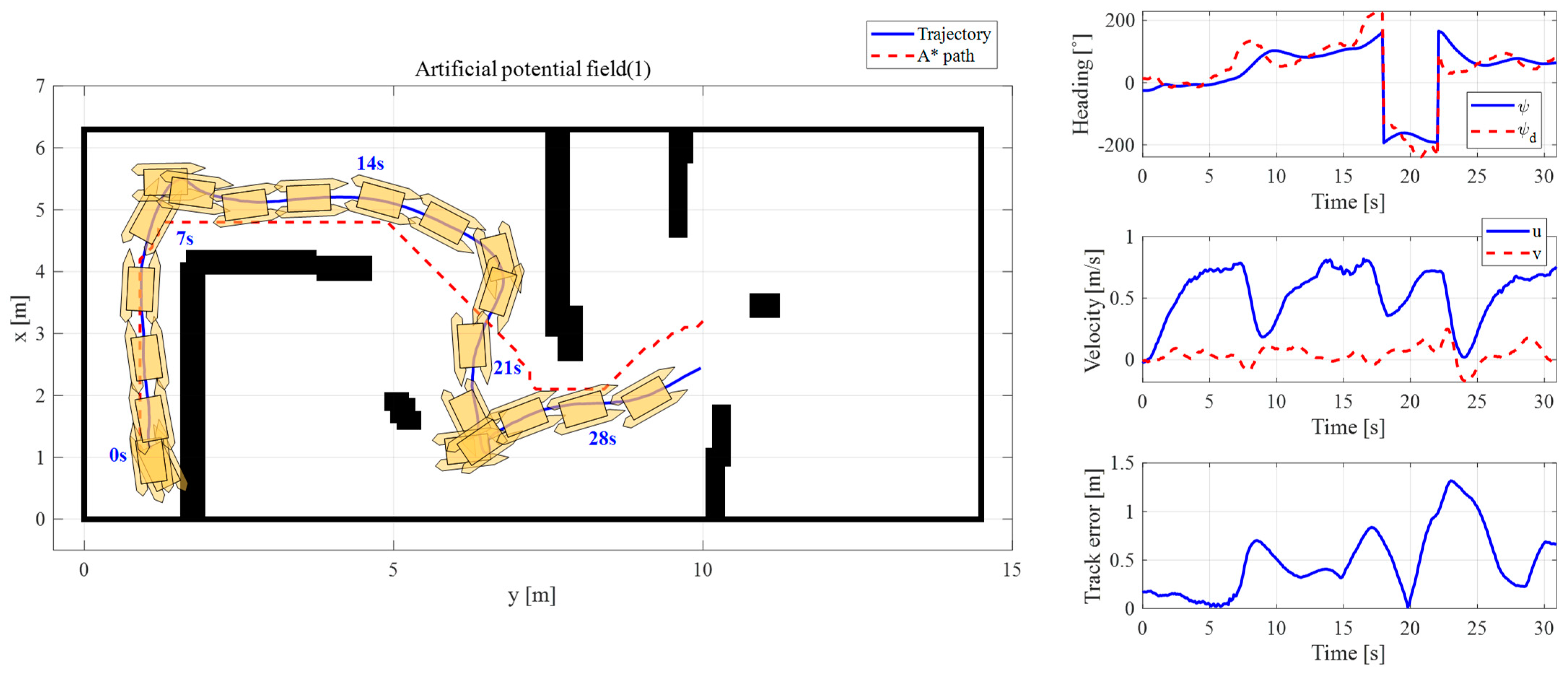
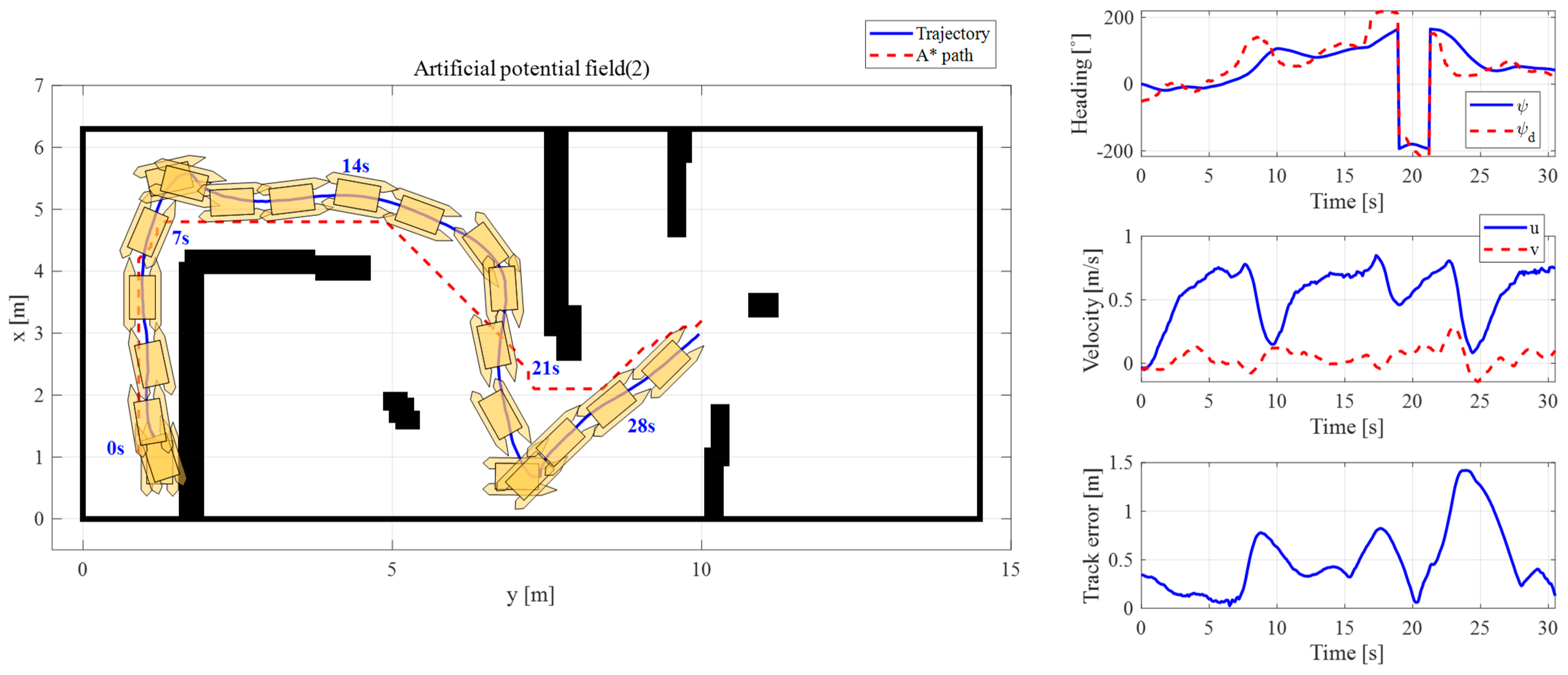
2.3.2. APF Method
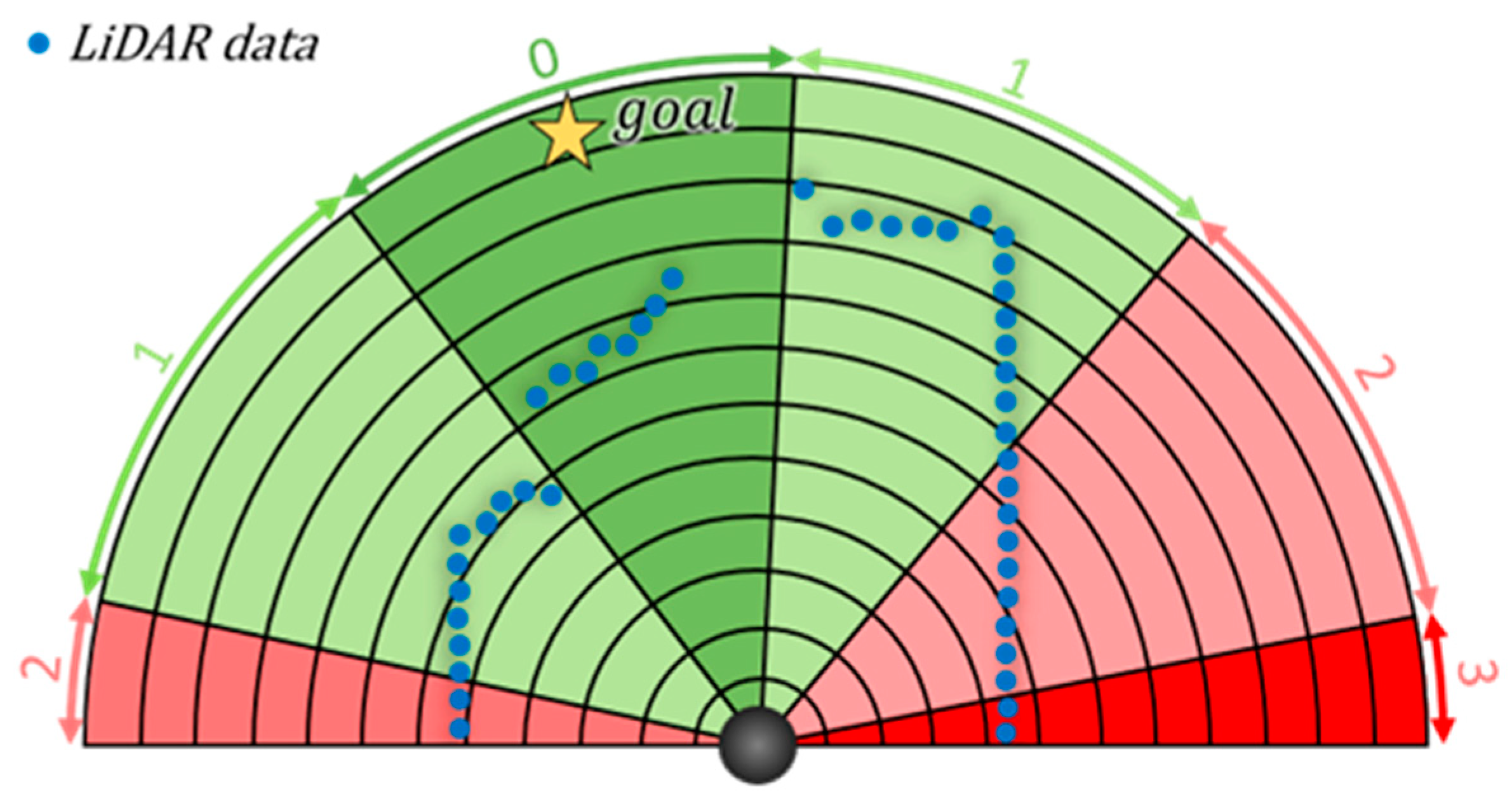
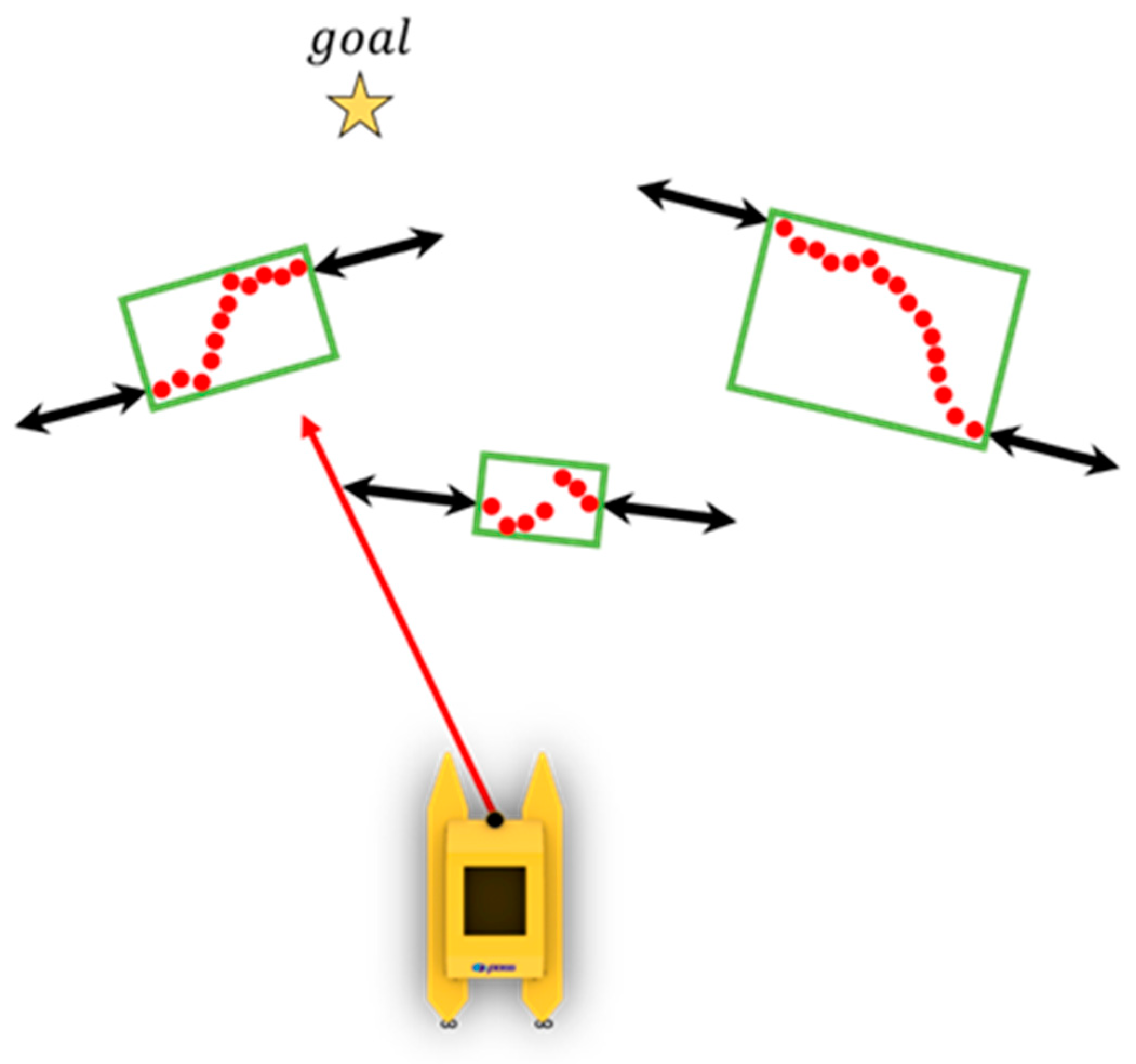
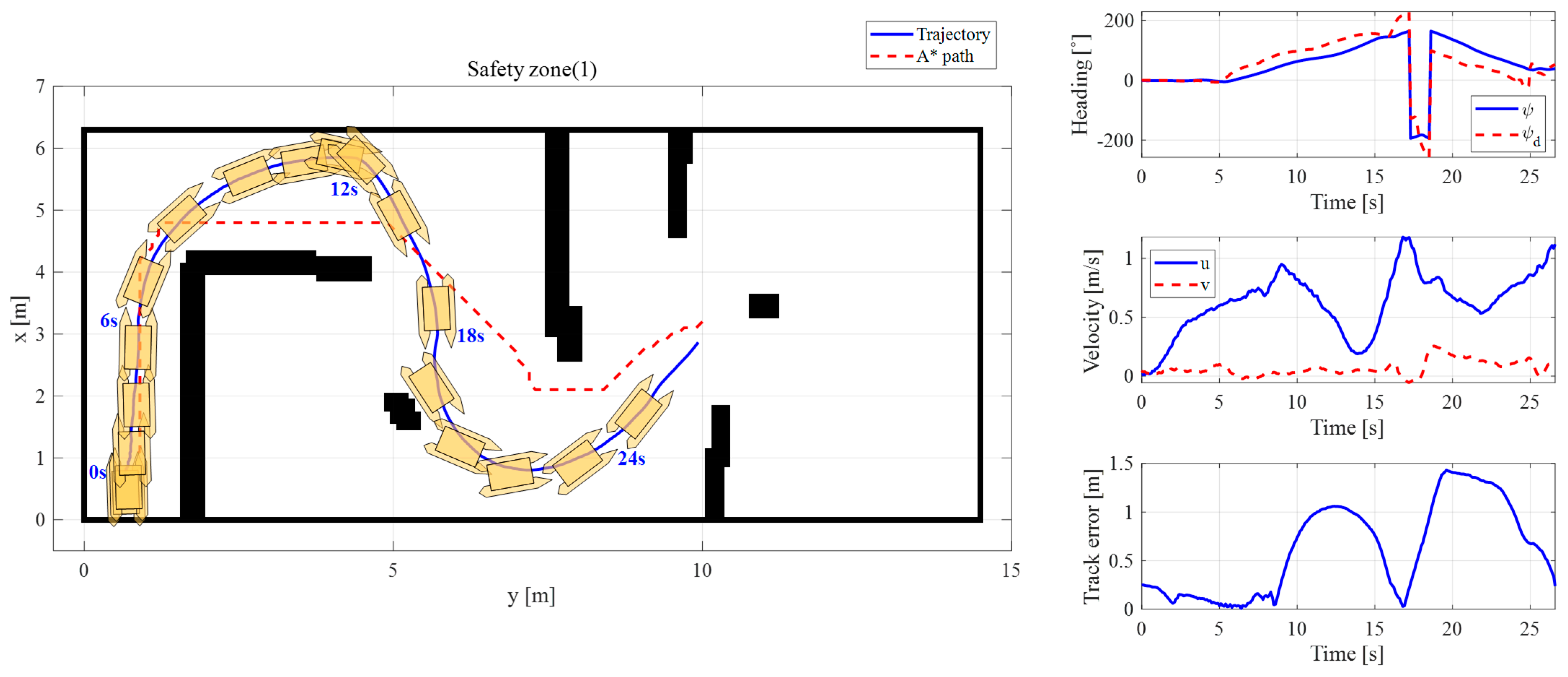
2.3.3. Safety Zone Method
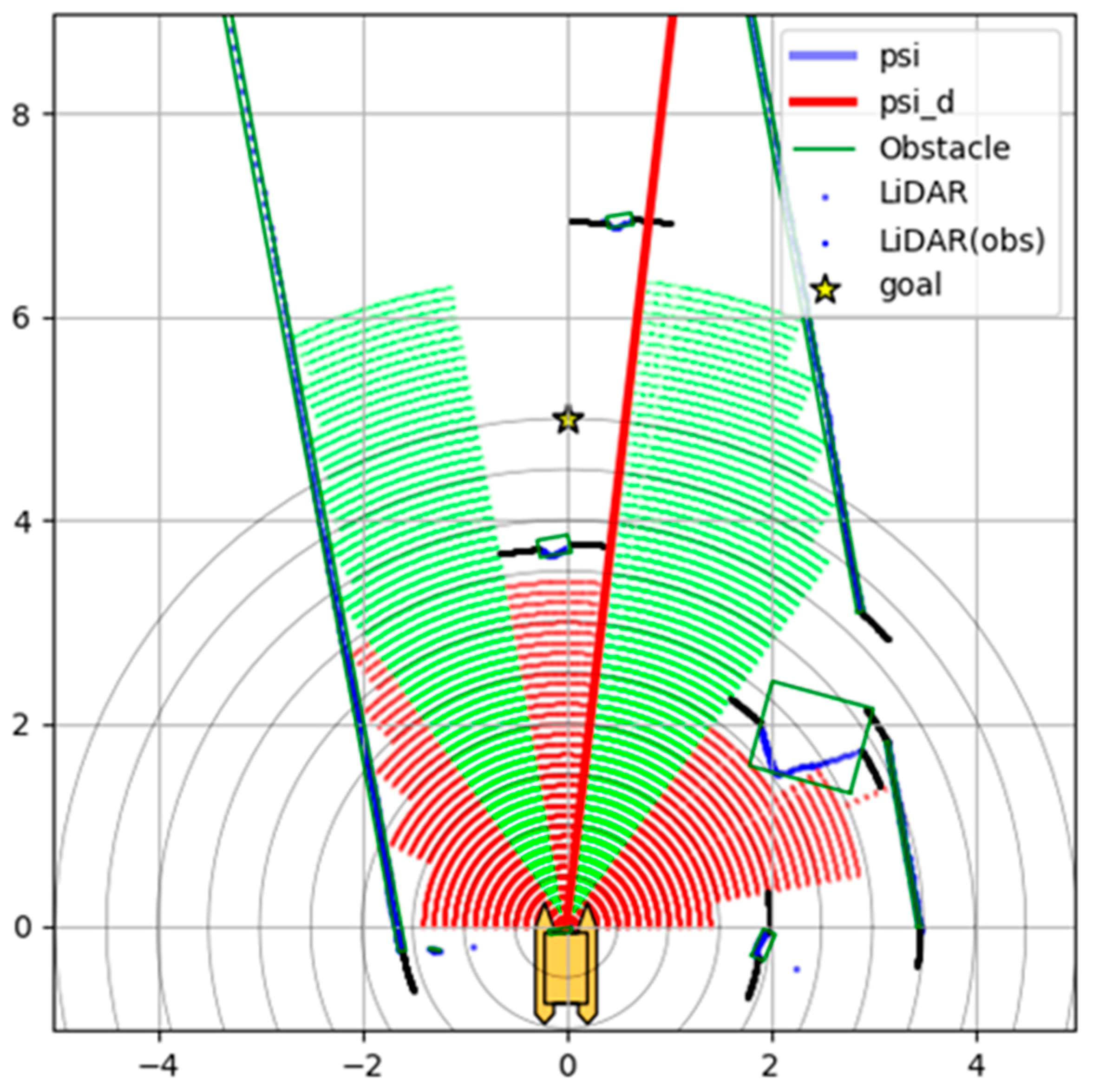
2.3.4. CRI Method
3. Results and Discussion
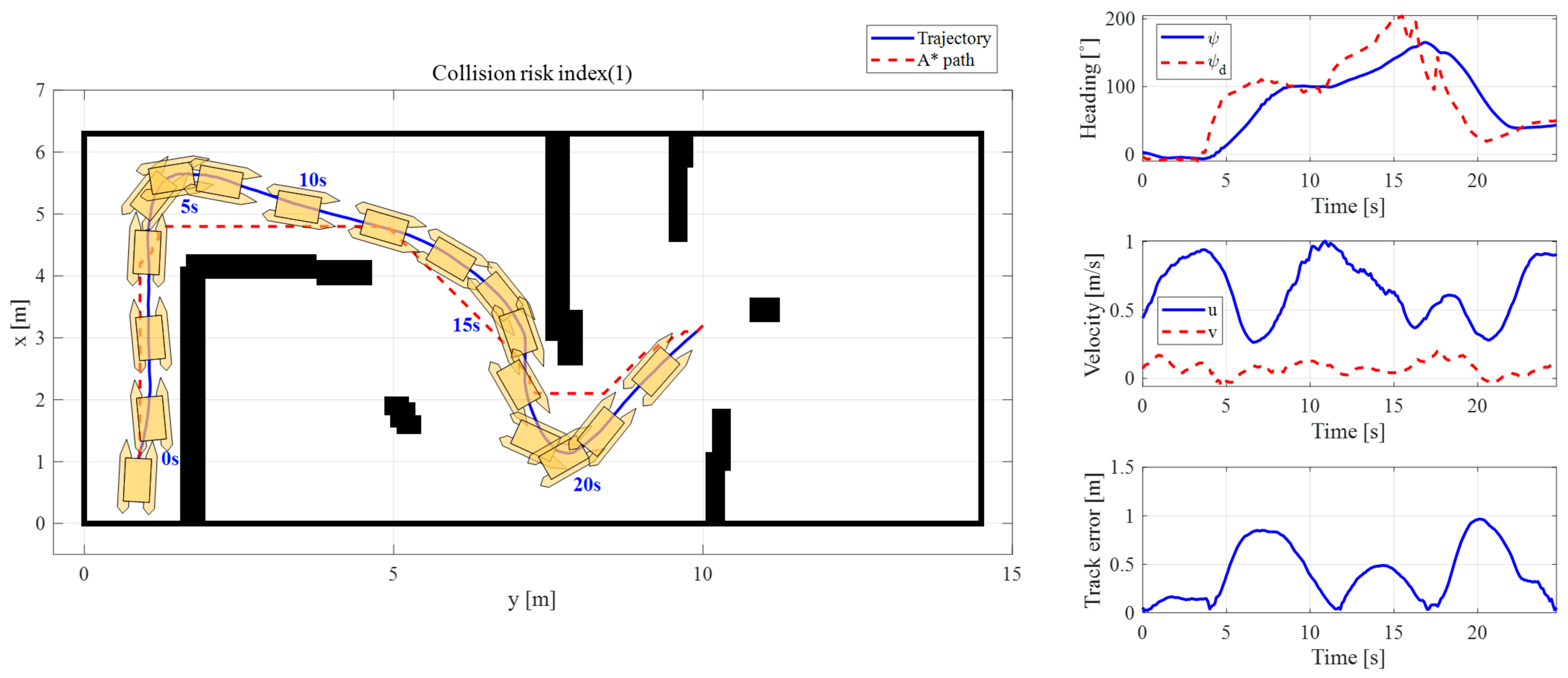
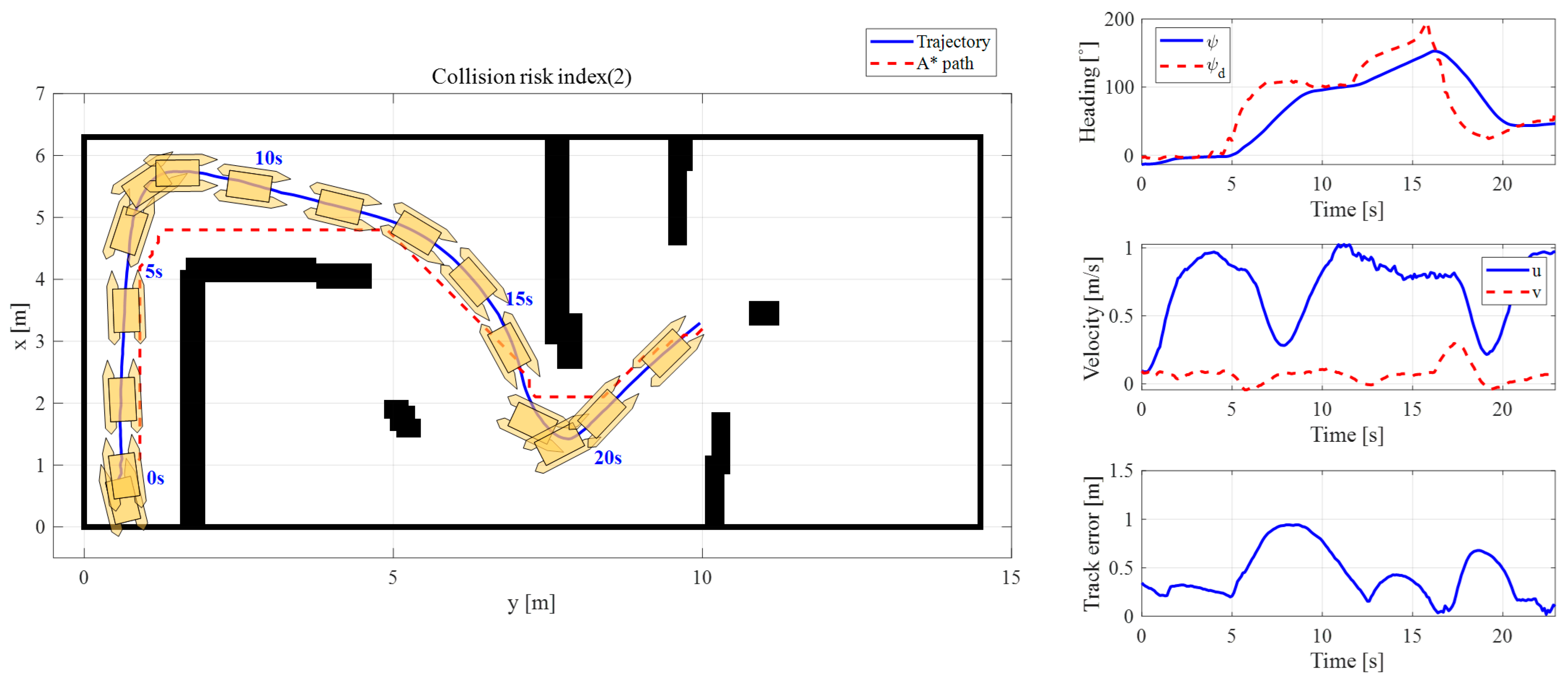
- The CRI method arrived at the destination approximately 22.5% and 8.5% faster than the APF and the safety zone methods, respectively, proving to be the most effective in terms of time savings.
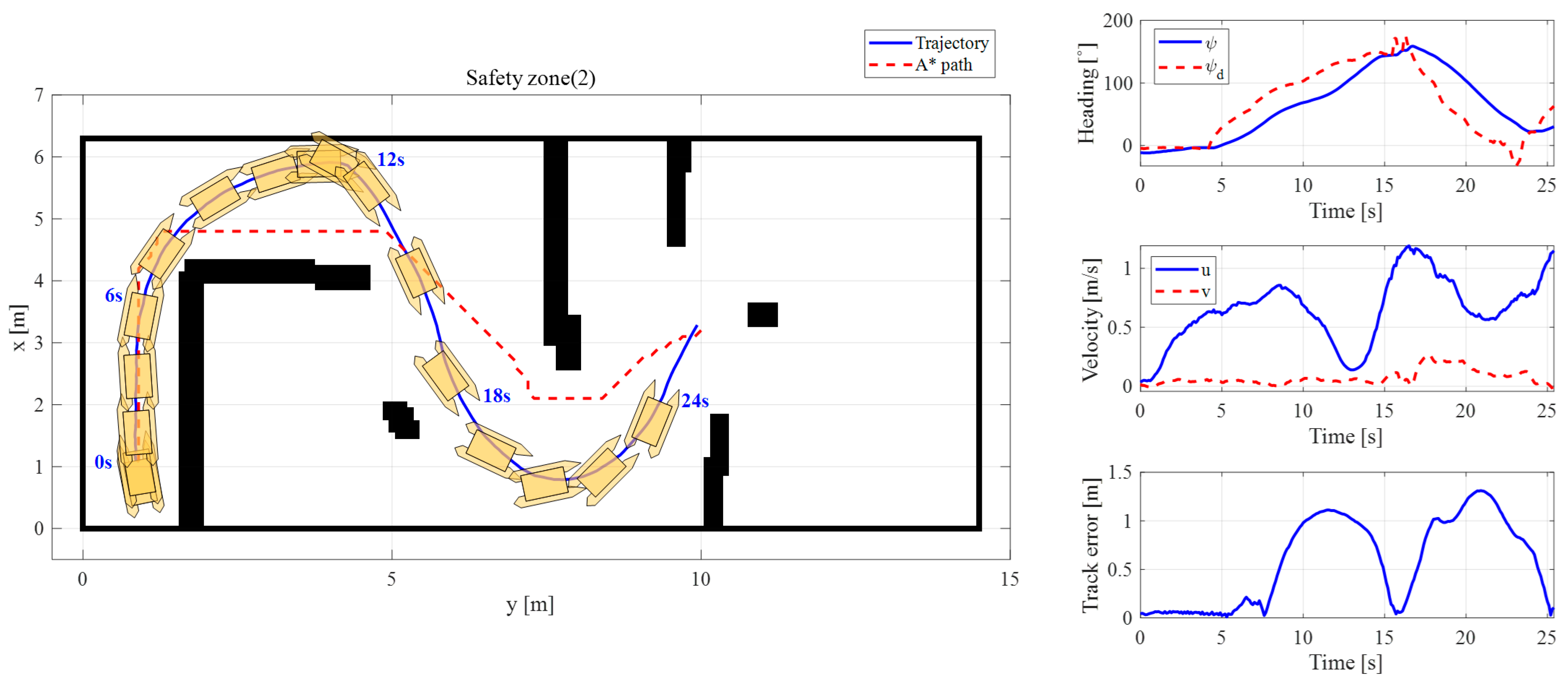
- The CRI method had a mean track error that was approximately 14.3% and 31.2% less than the APF and the safety zone methods, respectively, showing excellent performance in terms of optimal navigation.
- The APF method’s mean PWM was approximately 9.0% less than that of the other two methods, suggesting more efficient navigation in terms of control power consumption.
4. Conclusions
- The APF method is notable for its simplicity and low computational cost, proving its efficacy across different platforms and environments. However, it may become trapped in local minima, particularly in narrow waterways or near obstacles, leading to erratic movements.
- The safety zone method operates by navigating within a designated safe zone between obstacles. Its main advantage is the development of the algorithm without specific parameters, relying solely on the distance and angle to obstacles. Nevertheless, due to its focus solely on obstacles without considering the goal waypoint, it may result in risky maneuvers near walls or other barriers, potentially compromising consistent achievement of the goal.
- The CRI method consistently outperforms the other algorithms in terms of time efficiency and path precision. By reaching the destination more quickly and adhering closely to the optimal route, it maintains a track error under 1 m, demonstrating robust obstacle avoidance capabilities.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Jo, H.-J.; Kim, S.-R.; Kim, J.-H.; Park, J.-Y. Comparison of velocity obstacle and artificial potential field methods for collision avoidance in swarm operation of unmanned surface vehicles. J. Mar. Sci. Eng. 2022, 10, 2036. [Google Scholar] [CrossRef]
- Park, J.; Kang, M.; Lee, Y.; Jung, J.; Choi, H.-T.; Choi, J. Multiple autonomous surface vehicles for autonomous cooperative navigation tasks in a marine environment: Development and preliminary field tests. IEEE Access 2023, 11, 36203–36217. [Google Scholar] [CrossRef]
- Kuwata, Y.; Wolf, M.T.; Zarzhitsky, D.; Huntsberger, T.L. Safe maritime autonomous navigation with COLREGS, using velocity obstacles. IEEE J. Ocean. Eng. 2014, 39, 110–119. [Google Scholar] [CrossRef]
- Khatib, O. Real-time obstacle avoidance for manipulators and mobile robots. In Proceedings of the 1985 IEEE International Conference on Robotics and Automation, St. Louis, MO, USA, 25–28 March 1985; pp. 500–505. [Google Scholar] [CrossRef]
- Lyu, H.; Yin, Y. COLREGS-constrained real-time path planning for autonomous ships using modified artificial potential fields. J. Navig. 2019, 72, 588–608. [Google Scholar] [CrossRef]
- Fox, D.; Burgard, W.; Thrun, S. The dynamic window approach to collision avoidance. IEEE Robot. Autom. Mag. 1997, 4, 23–33. [Google Scholar] [CrossRef]
- Loe, Ø.A.G. Collision Avoidance for Unmanned Surface Vehicles. Master’s Thesis, Institutt for Teknisk Kybernetikk, Trondheim, Norway, 2008. [Google Scholar]
- Kim, H.-G.; Yun, S.-J.; Choi, Y.-H.; Ryu, J.-K.; Suh, J.-H. Collision Avoidance Algorithm Based on COLREGs for Unmanned Surface Vehicle. J. Mar. Sci. Eng. 2021, 9, 863. [Google Scholar] [CrossRef]
- Meyer, E.; Heiberg, A.; Rasheed, A.; San, O. COLREG-Compliant Collision Avoidance for Unmanned Surface Vehicle Using Deep Reinforcement Learning. IEEE Access 2020, 8, 165344–165364. [Google Scholar] [CrossRef]
- Chen, L.; Fu, Y.; Chen, P.; Mou, J. Survey on cooperative collision avoidance research for ships. IEEE Trans. Transp. Electrif. 2023, 9, 3012–3025. [Google Scholar] [CrossRef]
- Cho, Y.; Kim, J.; Kim, J. Intent inference-based ship collision avoidance in encounters with rule-violating vessels. IEEE Robot. Autom. Lett. 2022, 7, 518–525. [Google Scholar] [CrossRef]
- Ko, K. Study on Collision Avoidance Performance of a Ship in Waves. Master’s Thesis, Seoul National University, Seoul, Republic of Korea, 2022. [Google Scholar]
- Lee, D.; Woo, J. Reactive Collision Avoidance of an Unmanned Surface Vehicle through Gaussian Mixture Model-Based Online Mapping. J. Mar. Sci. Eng. 2022, 10, 472. [Google Scholar] [CrossRef]
- Woo, J.; Kim, N. Collision avoidance for an unmanned surface vehicle using deep reinforcement learning. Ocean Eng. 2020, 199, 107001. [Google Scholar] [CrossRef]
- Han, J.; Cho, Y.; Kim, J.; Kim, J.; Son, N.; Kim, S.Y. Autonomous collision detection and avoidance for ARAGON USV: Development and field tests. J. Field Robot. 2020, 37, 987–1002. [Google Scholar] [CrossRef]
- Jo, H.-J.; Kim, J.-H.; Kim, S.-R.; Woo, J.-H.; Park, J.-Y. Development of autonomous algorithm for boat using robot operating system. J. Soc. Nav. Archit. Korea 2021, 58, 121–128. [Google Scholar] [CrossRef]
- Kim, J.-S.; Lee, D.-H.; Kim, D.-W.; Park, H.; Paik, K.-J.; Kim, S. A numerical and experimental study on the obstacle collision avoidance system using a 2D LiDAR sensor for an autonomous surface vehicle. Ocean Eng. 2022, 257, 111508. [Google Scholar] [CrossRef]
- Gonzalez-Garcia, A.; Collado-Gonzalez, I.; Cuan-Urquizo, R.; Sotelo, C.; Sotelo, D.; Castañeda, H. Path-following and LiDAR-based obstacle avoidance via NMPC for an autonomous surface vehicle. Ocean Eng. 2022, 266, 112900. [Google Scholar] [CrossRef]
- Fossen, T.I. Nonlinear Modelling and Control of Underwater Vehicles. Ph.D. Thesis, The Norwegian Institute of Technology, Trondheim, Norway, 1991. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Specifications | PASS Mk II |
|---|---|
| Length | 1.2 m |
| Breadth | 0.6 m |
| Height | 0.22 m |
| Draft | 0.075 m |
| Mass | 15.27 kg |
| Processors | Nvidia Xavier AGX (NVIDIA Corporation, Santa Clara, CA, USA), Raspberry Pi 4B+ (Raspberry Pi Foundation, Cambridge, UK), Arduino Uno (Arduino LLC, Somerville, MA, USA) |
| Power | Lithium polymer (Li-Po) battery (14.4 V) × 2 ea |
| Propulsion | Bluerobotics T200 × 2 ea (Blue Robotics, Torrance, CA, USA) |
| Sensors | GPS (ZED G9P) × 2 ea (Septentrio NV, Leuven, Belgium), IMU (Microstrain 3DM-GX5-25) (Parker Hannifin Corporation, Microstrain Sensing Systems, Williston, VT, USA), LiDAR (YDLiDAR TG50) (Shenzhen YDLidar Technology Co., Ltd., Shenzhen, China), Camera (ZED 2) (Stereolabs, San Francisco, CA, USA) |
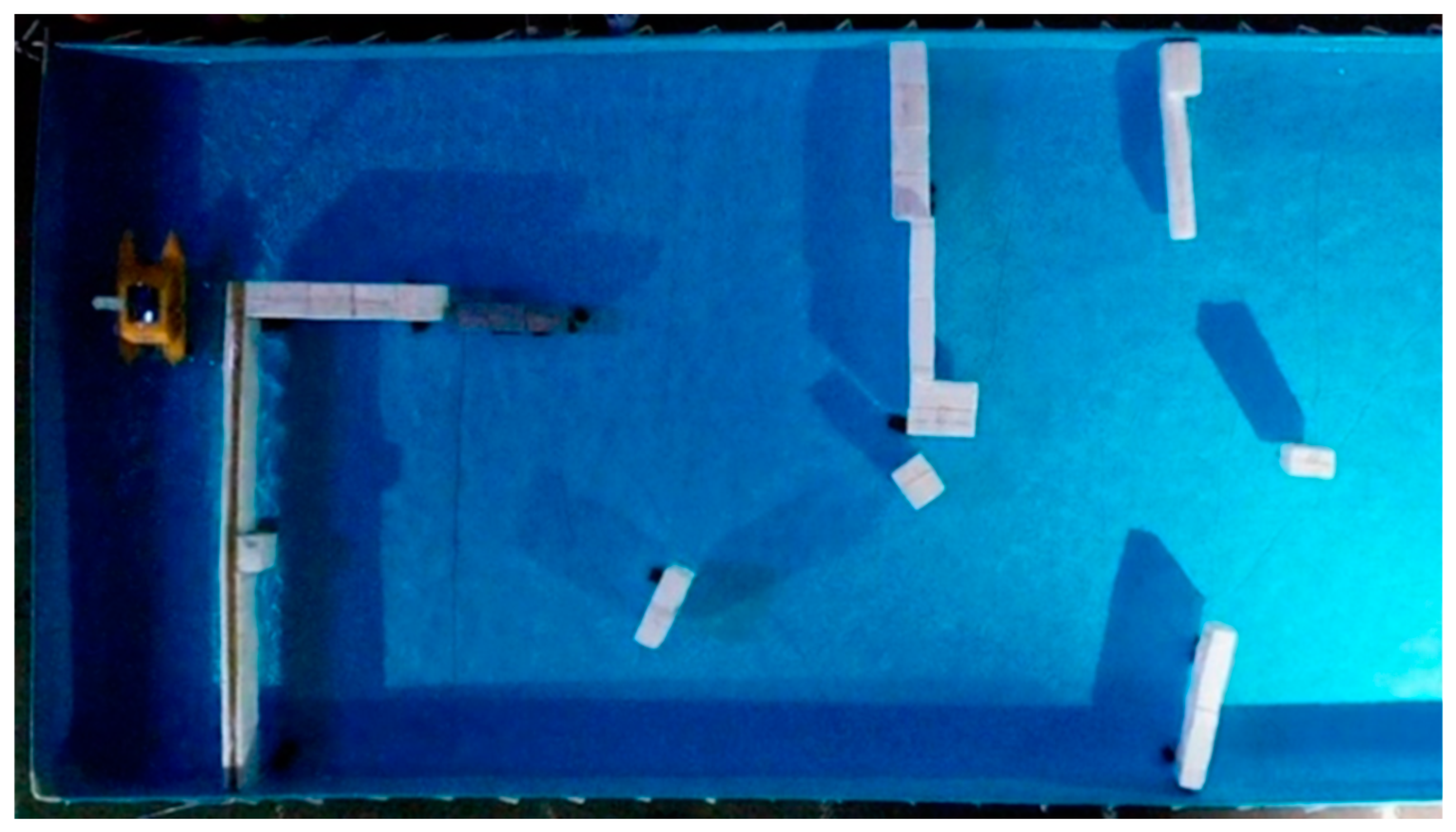
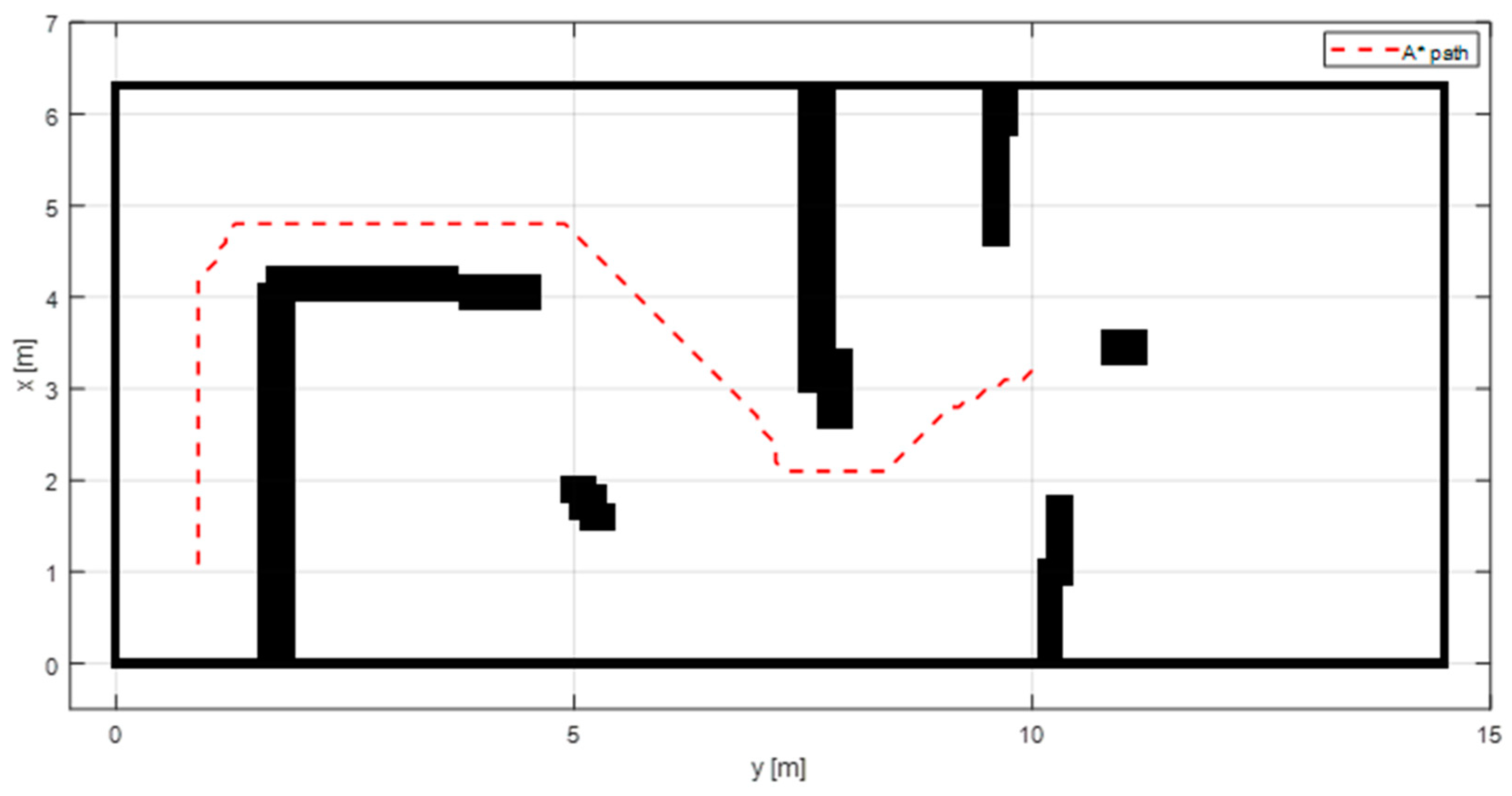
| Map | Dimension |
|---|---|
| Width | 14.5 m |
| Height | 6.3 m |
| Start waypoint | (0.8, 1) |
| Goal waypoint | (10, 3.2) |
| Method | Time [s] | Mean Track Error [m] | Mean PWM [-] |
|---|---|---|---|
| APF (1) | 30.9 | 0.478 | 92 |
| APF (2) | 30.5 | 0.489 | 91 |
| APF (average) | 30.7 | 0.484 | 92 |
| Safety zone (1) | 26.6 | 0.623 | 98 |
| Safety zone (2) | 25.4 | 0.584 | 104 |
| Safety zone (average) | 26.0 | 0.603 | 102 |
| CRI (1) | 24.7 | 0.409 | 97 |
| CRI (2) | 22.9 | 0.421 | 108 |
| CRI (average) | 23.8 | 0.415 | 103 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, J.-H.; Jo, H.-J.; Kim, S.-R.; Choi, S.-W.; Park, J.-Y.; Kim, N. Comparison of Collision Avoidance Algorithms for Unmanned Surface Vehicle Through Free-Running Test: Collision Risk Index, Artificial Potential Field, and Safety Zone. J. Mar. Sci. Eng. 2024, 12, 2255. https://doi.org/10.3390/jmse12122255
Kim J-H, Jo H-J, Kim S-R, Choi S-W, Park J-Y, Kim N. Comparison of Collision Avoidance Algorithms for Unmanned Surface Vehicle Through Free-Running Test: Collision Risk Index, Artificial Potential Field, and Safety Zone. Journal of Marine Science and Engineering. 2024; 12(12):2255. https://doi.org/10.3390/jmse12122255
Chicago/Turabian StyleKim, Jung-Hyeon, Hyun-Jae Jo, Su-Rim Kim, Si-Woong Choi, Jong-Yong Park, and Nakwan Kim. 2024. "Comparison of Collision Avoidance Algorithms for Unmanned Surface Vehicle Through Free-Running Test: Collision Risk Index, Artificial Potential Field, and Safety Zone" Journal of Marine Science and Engineering 12, no. 12: 2255. https://doi.org/10.3390/jmse12122255
APA StyleKim, J.-H., Jo, H.-J., Kim, S.-R., Choi, S.-W., Park, J.-Y., & Kim, N. (2024). Comparison of Collision Avoidance Algorithms for Unmanned Surface Vehicle Through Free-Running Test: Collision Risk Index, Artificial Potential Field, and Safety Zone. Journal of Marine Science and Engineering, 12(12), 2255. https://doi.org/10.3390/jmse12122255