
A Feature Extraction Method of Ship Underwater Noise Using Enhanced Peak Cross-Correlation Empirical Mode Decomposition Method and Multi-Scale Permutation Entropy


Abstract
:1. Introduction
2. The Proposed Method for Extracting Features from Ship Underwater Noise Signals
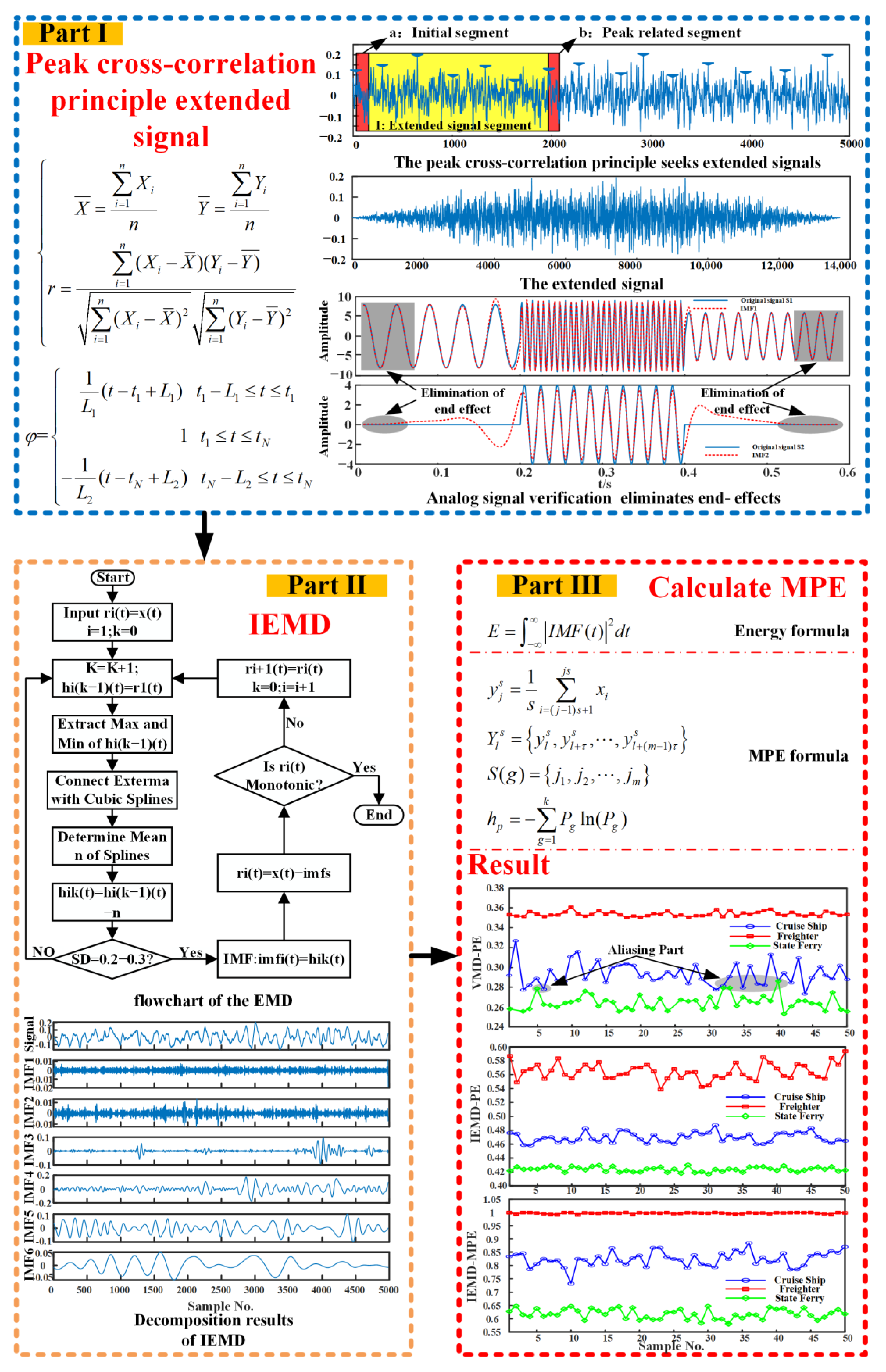
2.1. Overview of Research Methods
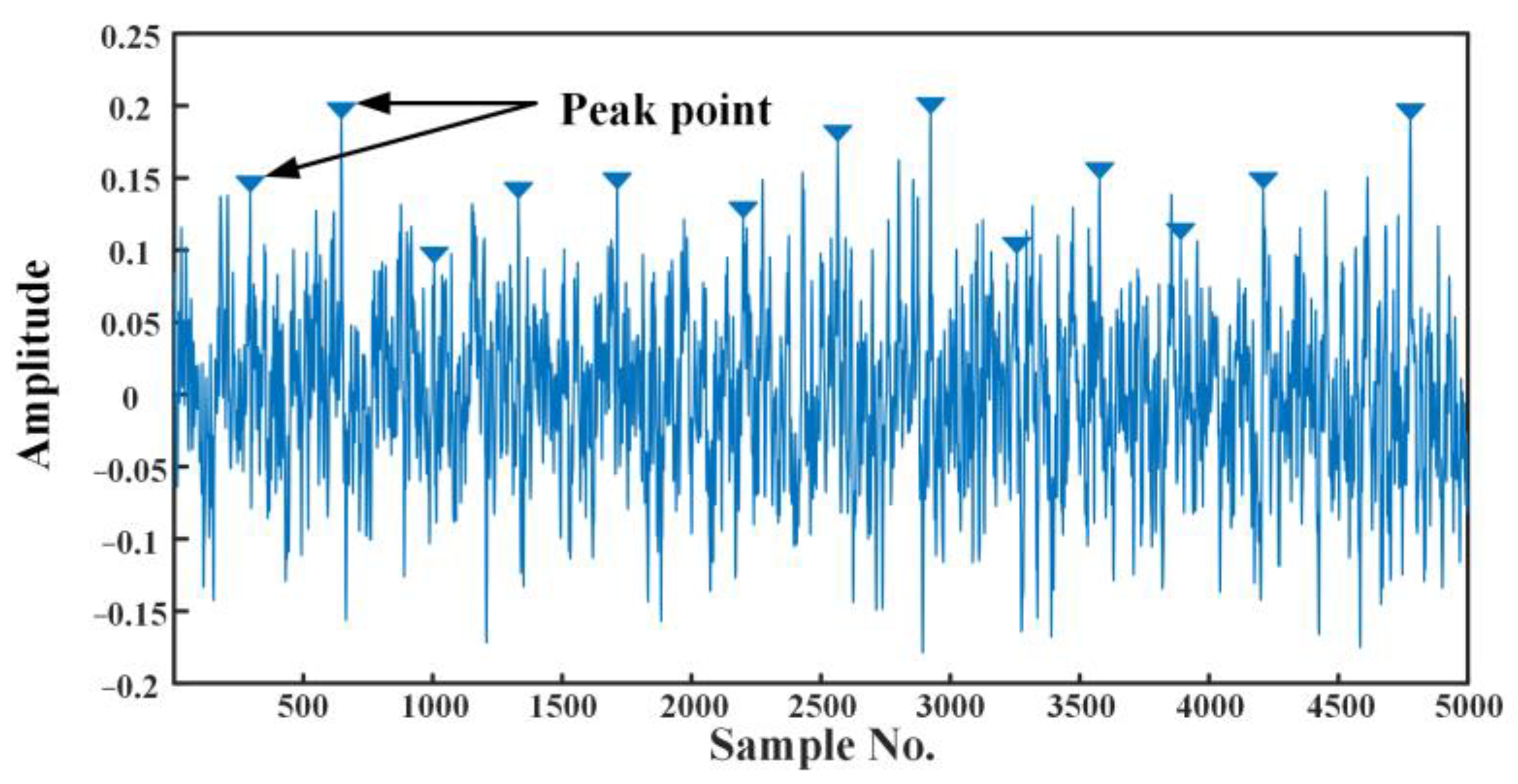
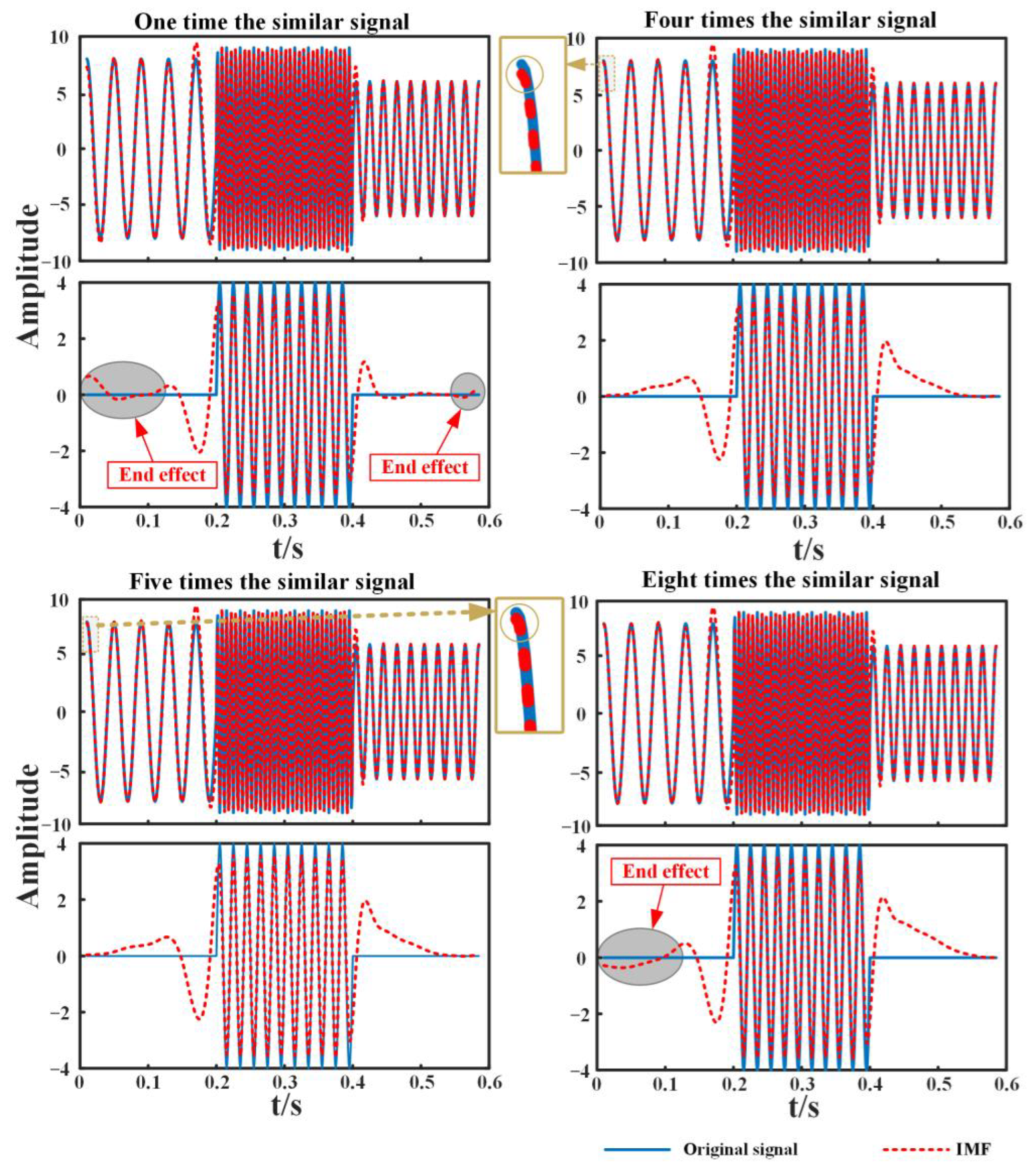
2.2. The Peak Cross-Correlation Method Is Proposed to Solve the End Effects of EMD
- is greater than the amplitude of its adjacent moments, namely and .
- The peak is greater than a predefined threshold, which is used to screen out the more obvious peak.
2.3. Noise Signal Feature Extraction and Recognition
- (1)
- A phase space reconstruction is carried out for an IMF signal () whose group length is , and the matrix is obtained as follows:where , is the embedding dimension, ; is the delay time, [35]. In this paper, the length of IMF is 5000. Each row in the matrix is a reconstruction component, and there are reconstruction components.
- (2)
- Rearrange each reconstructed component in ascending order, obtaining a new sequence where the column indices of each data position in the vector form a new sequence. There is a total of different sequences mapped in the -dimensional phase space:
- (3)
- Calculate the occurrence frequency of each sequence and divide it by the total occurrences of the m different symbol sequences, yielding the probability of each sequence occurrence: .
- (4)
- The formula for calculating the permutation entropy of the energy-optimal IMF obtained from the enhanced EMD method with peak cross-correlation for underwater ship noise signals is as follows:where represents the unnormalized permutation entropy; is the probability of occurrence of different signal time series.
- (5)
- The maximum value of the permutation entropy is , and the permutation entropy is normalized, that is,
- (1)
- The IMF signal of length is subjected to coarse-graining to obtain the multi-scale decomposition sequence :where represents the scale factor; , indicates rounding; is the subsequence under scale .
- (2)
- Sequence reconstruction is performed for (calculating permutation entropy): , where represents the component of the reconstruction; is the embedding dimension; is the delay time.
- (3)
- Arrange each component in in ascending order to obtain:where .
- (4)
- The formula for calculating the MPE of the energy-optimal IMF signal is shown in Equation (26).
3. Validation of EMD Method with Peak Cross-Correlation
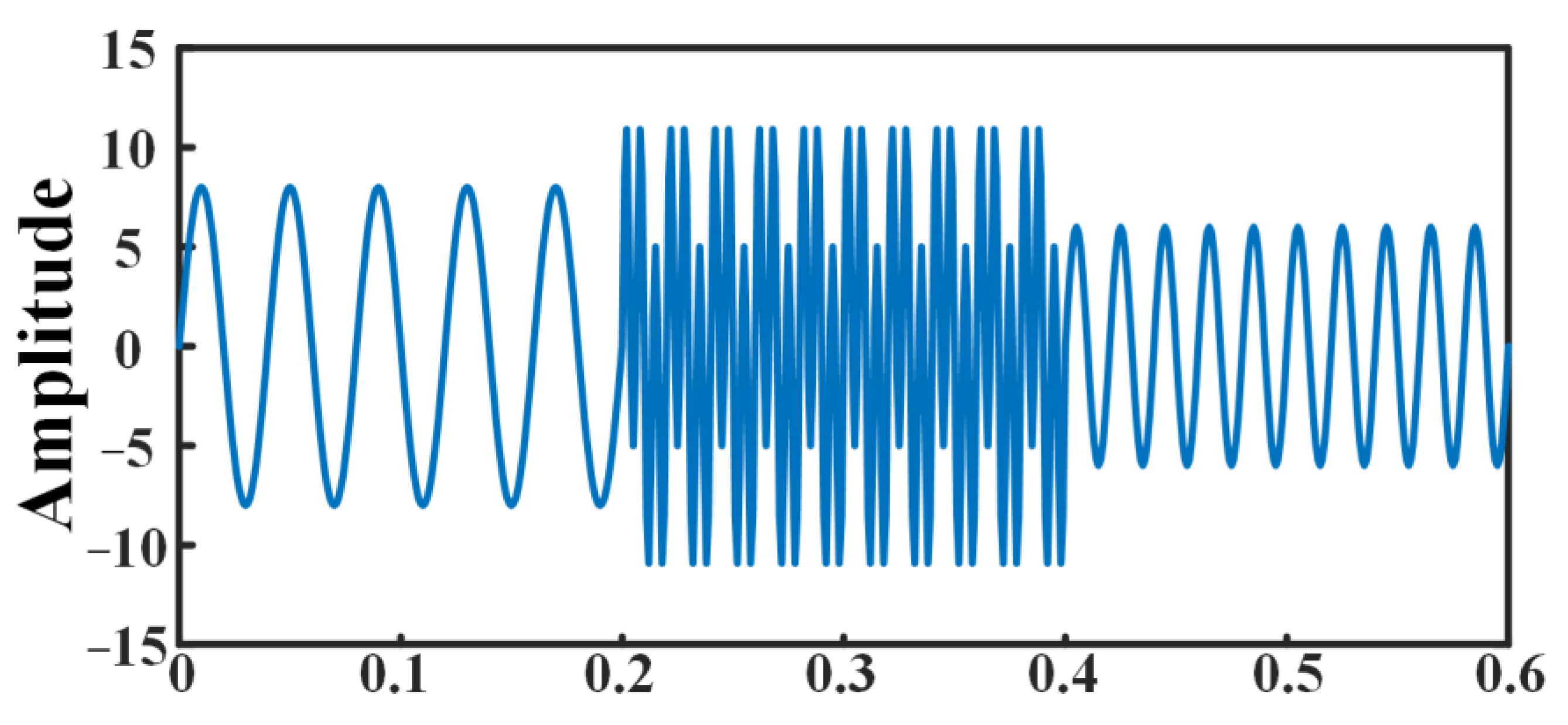
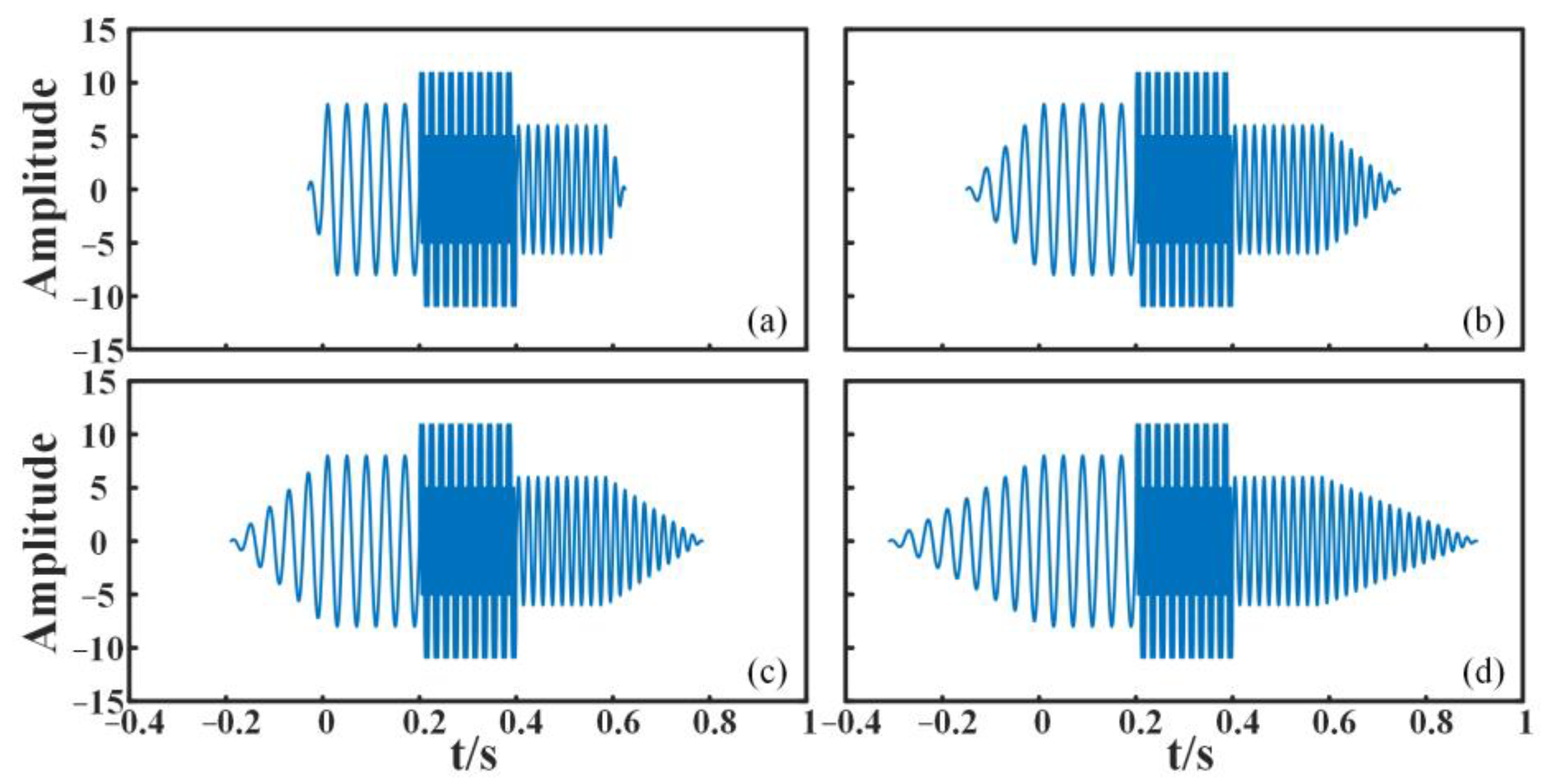
3.1. Analog Signal Verification
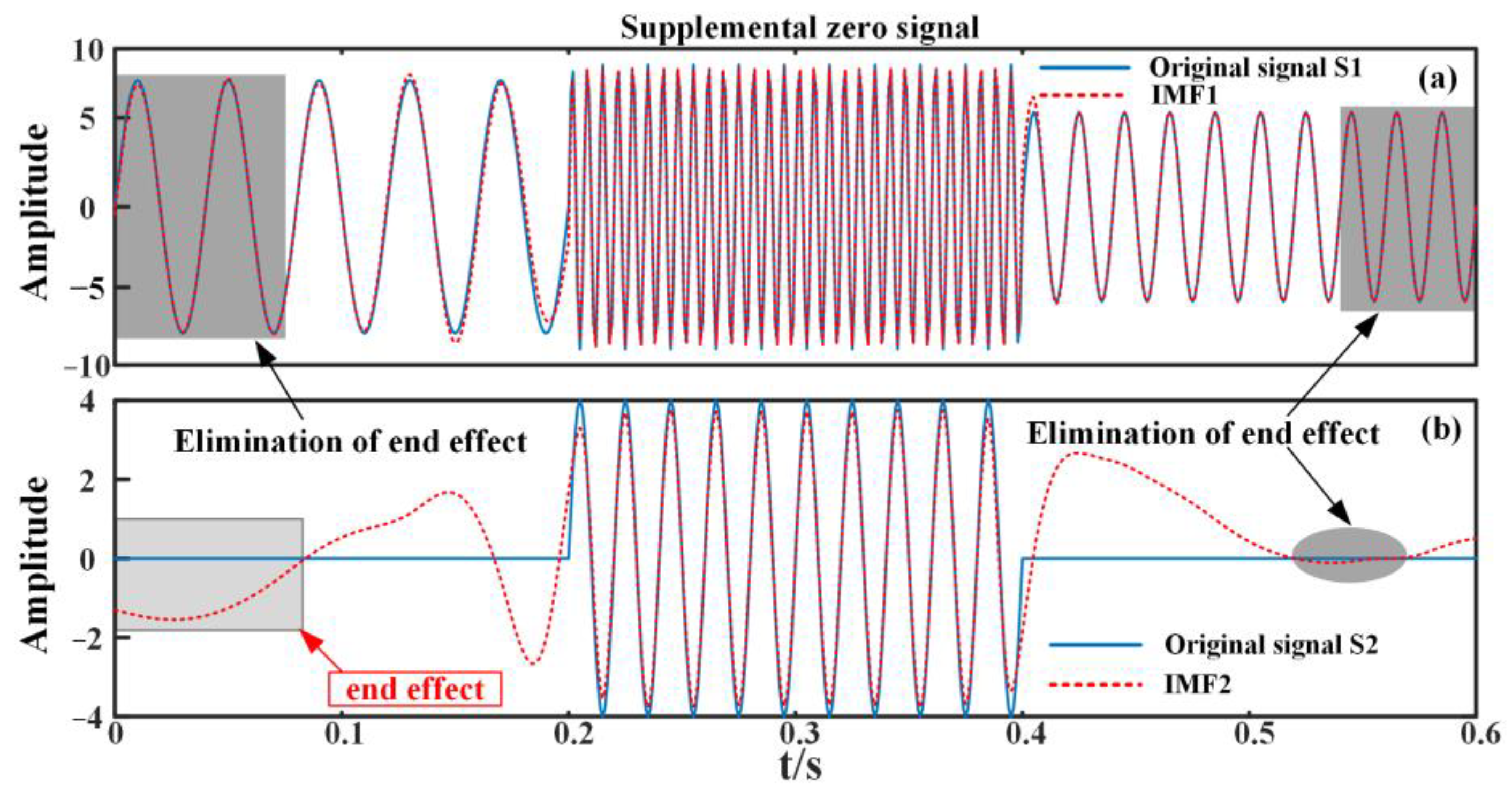
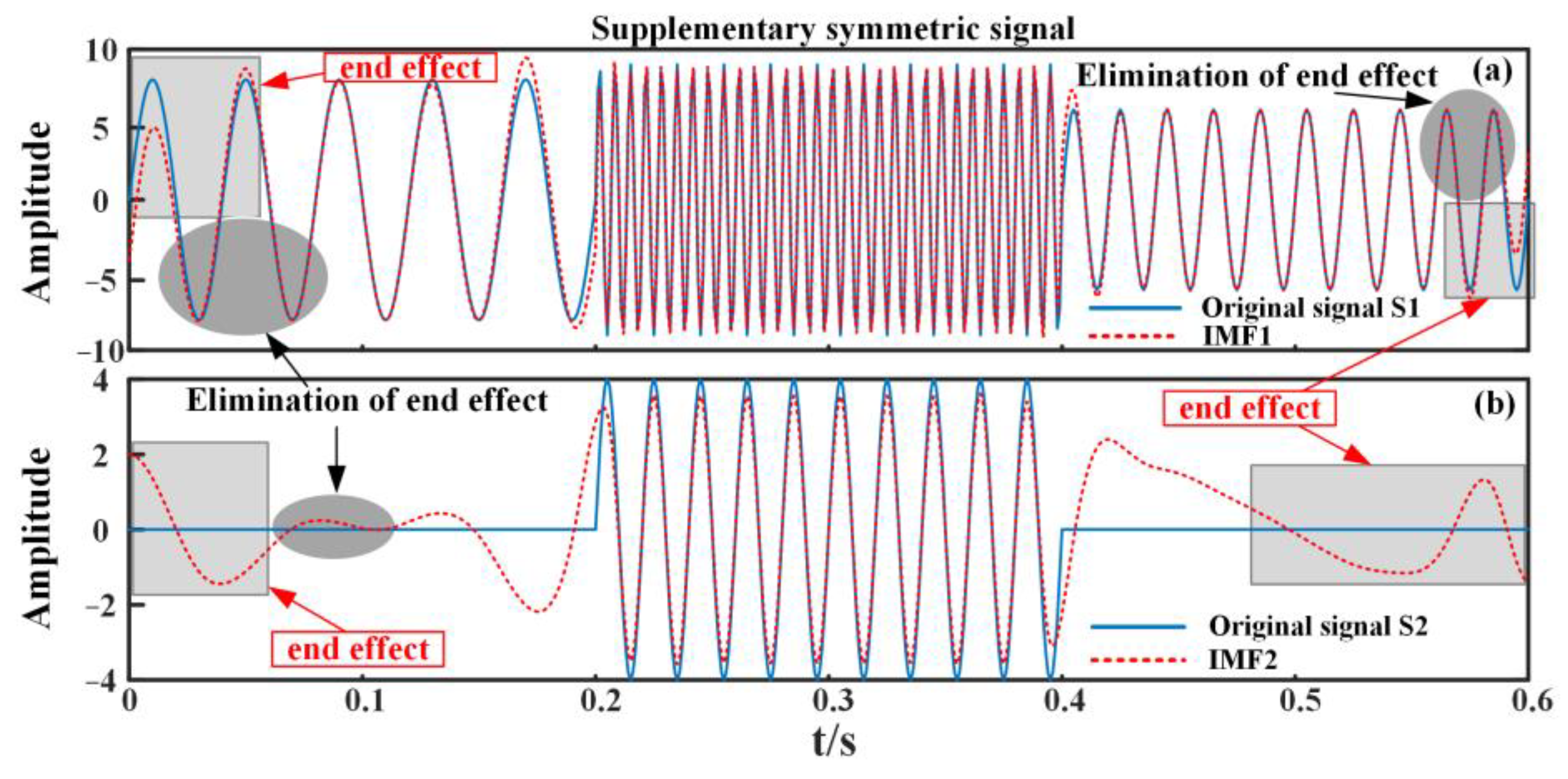
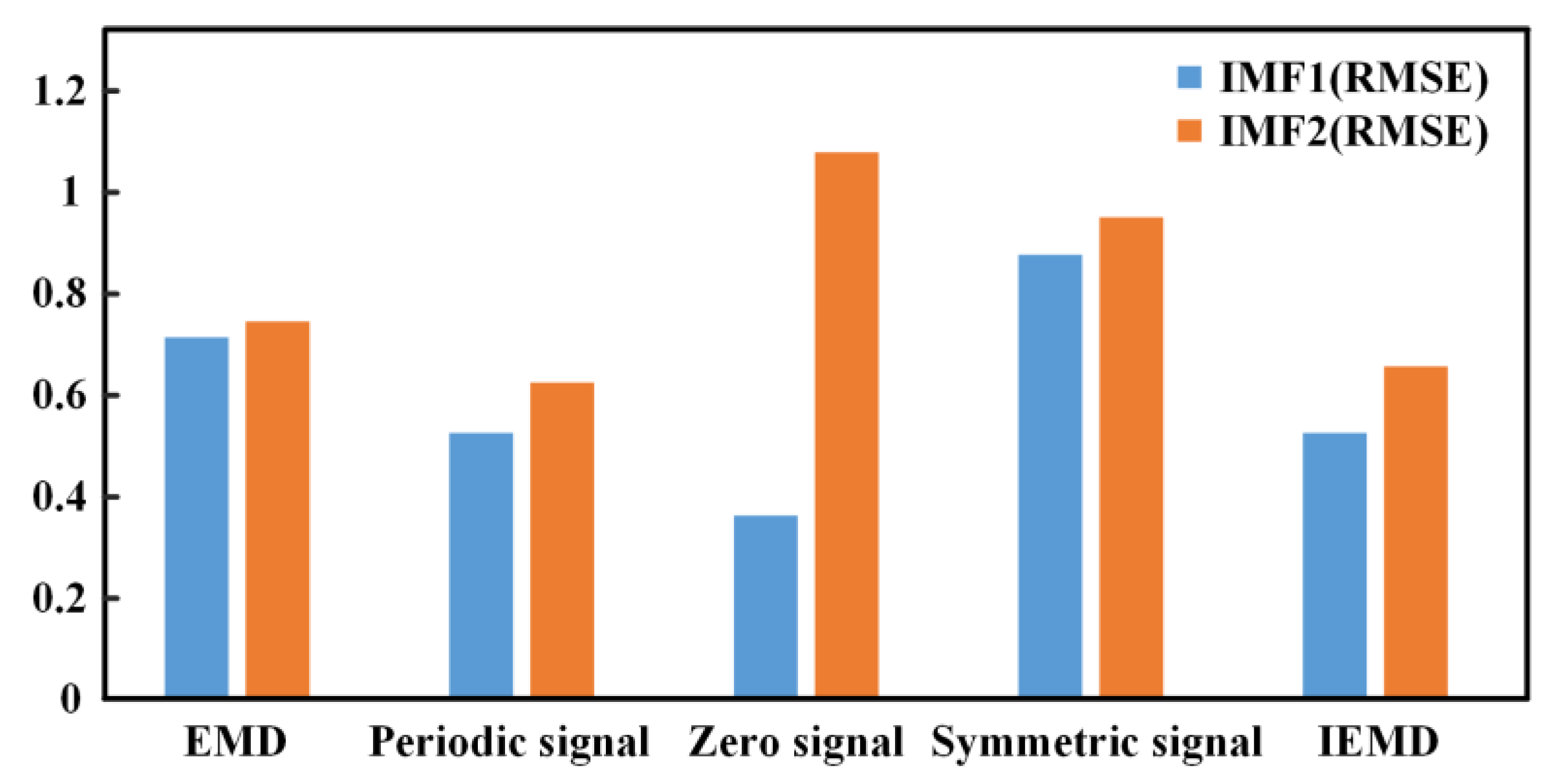
3.2. Comparison of IEMD with EMD Based on Other Expansion Methods
3.3. Criteria for Evaluation
4. Based on the Method Proposed in This Paper, the Extraction of Characteristics from Underwater Ship Noise
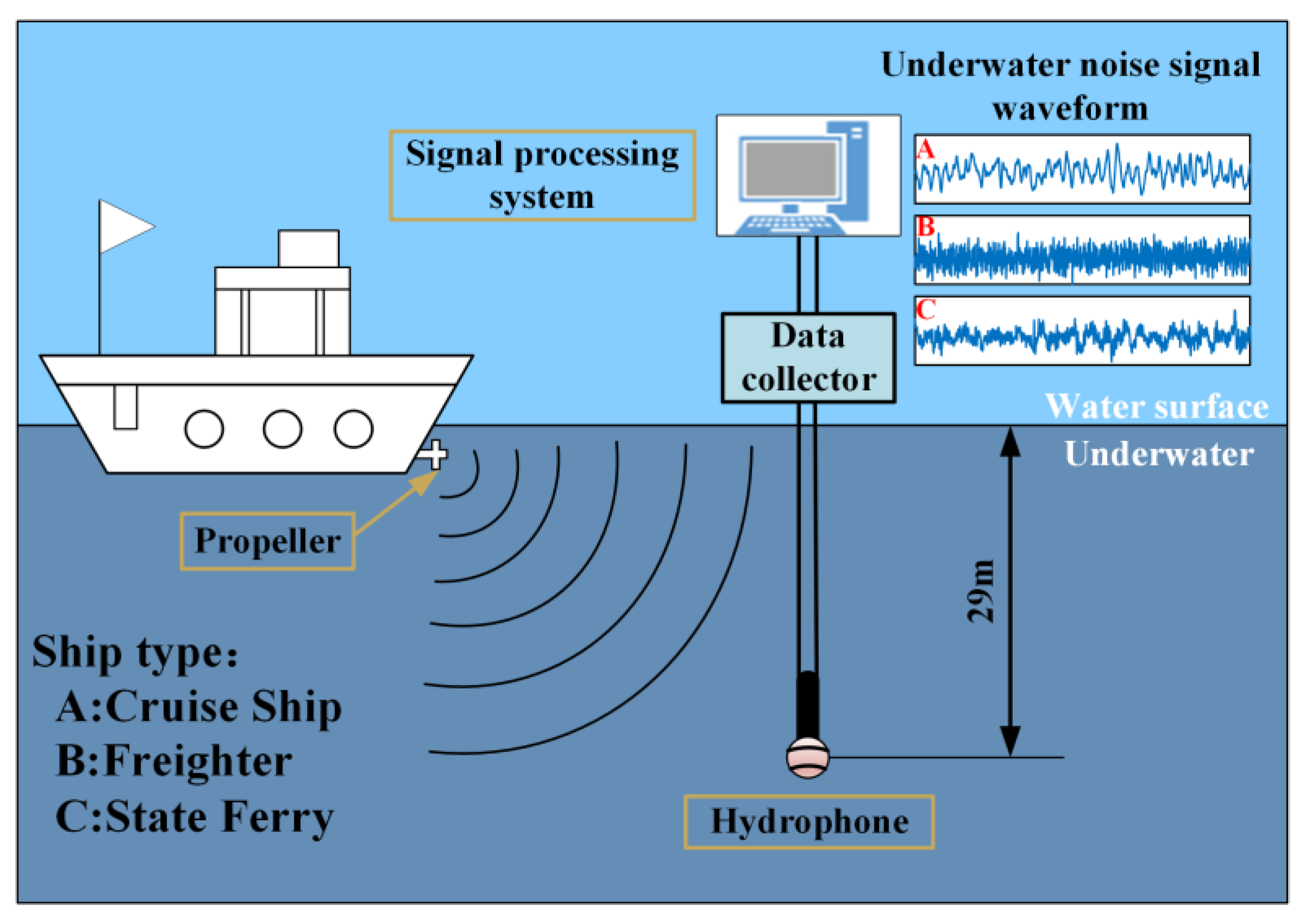
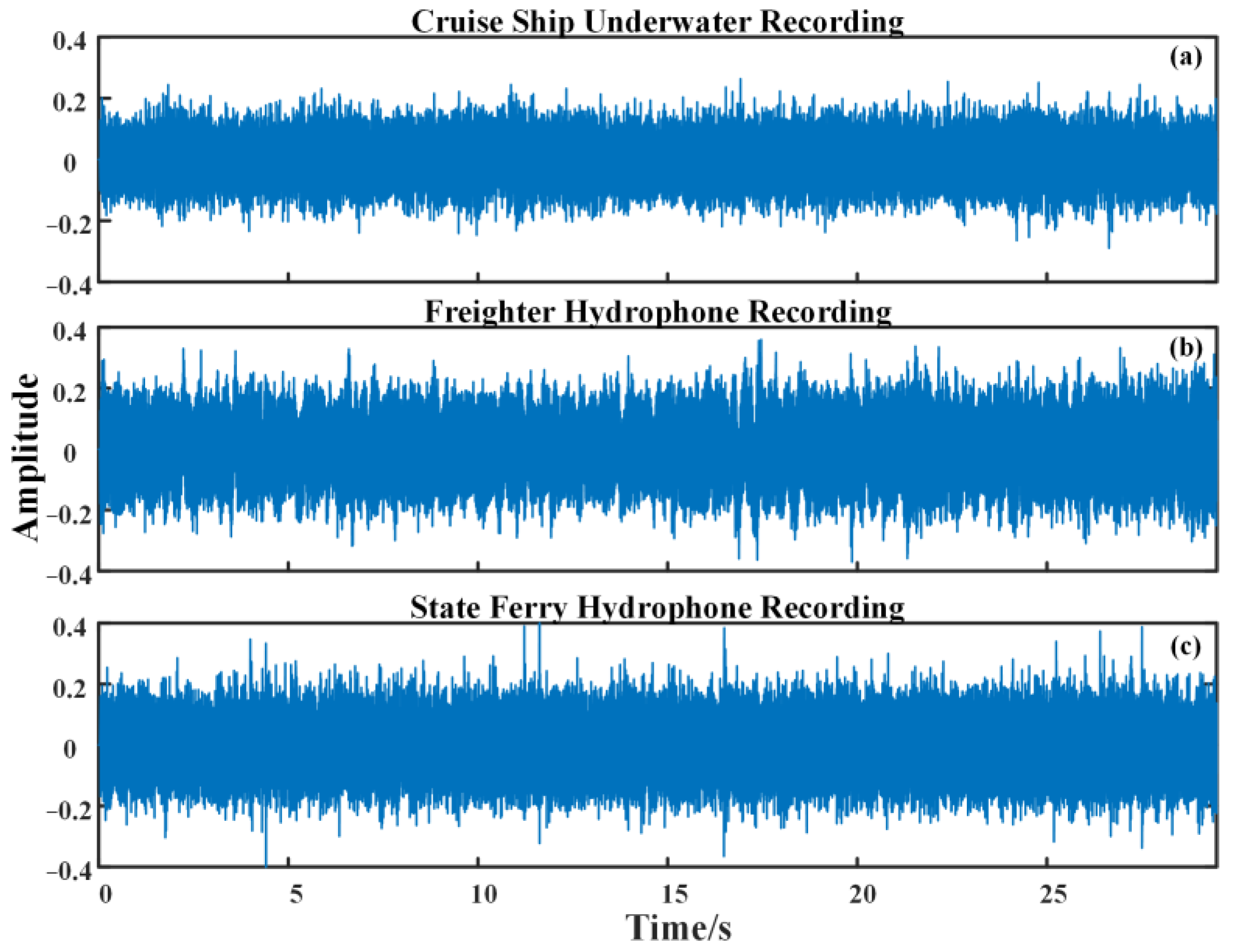
4.1. Source of Underwater Noise Signal of Ship
4.2. IEMD Is Applied to the Underwater Noise Signal of Ships
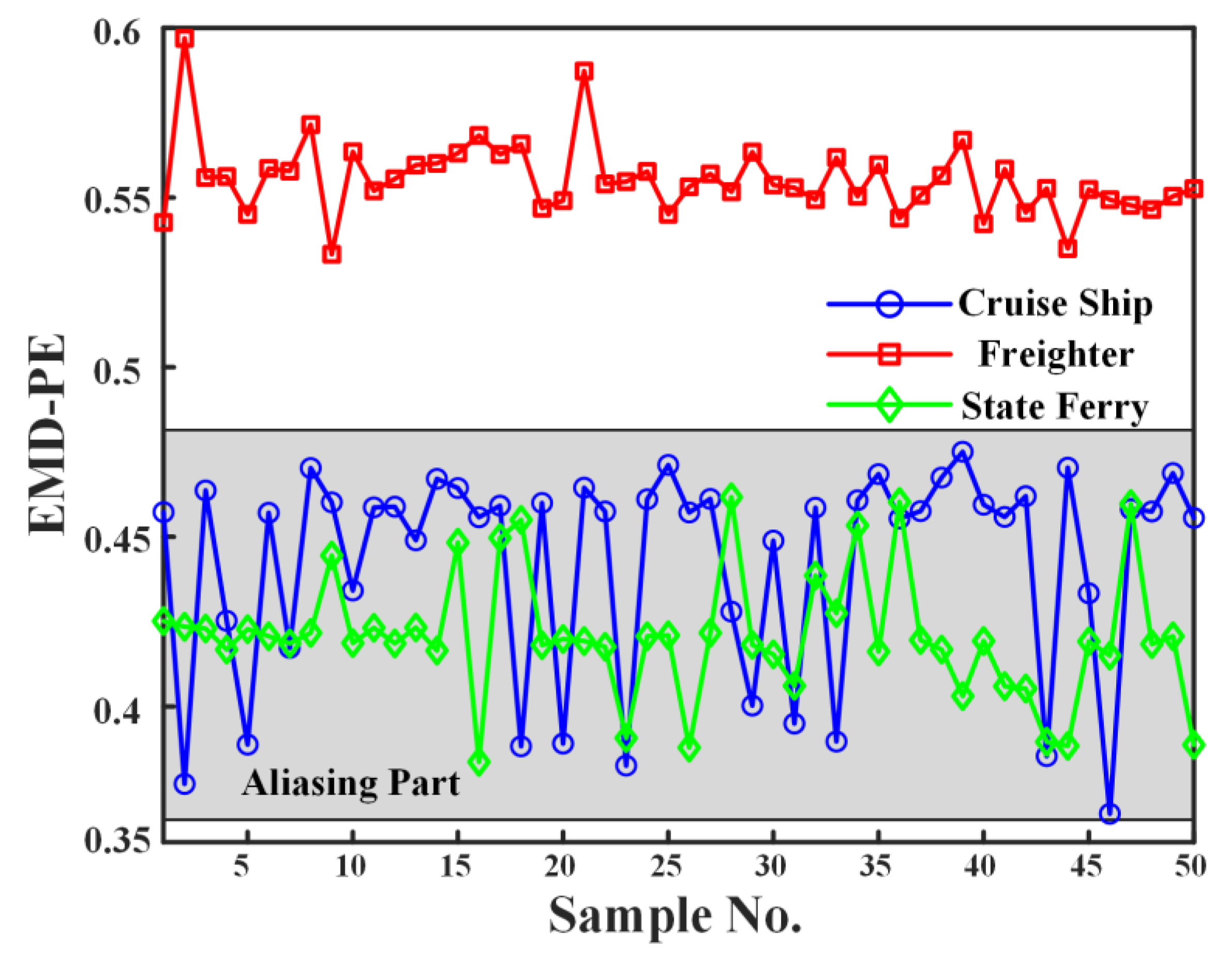
4.3. Feature Extraction of Ship Underwater Noise Signal
4.4. Application Verification
5. Conclusions
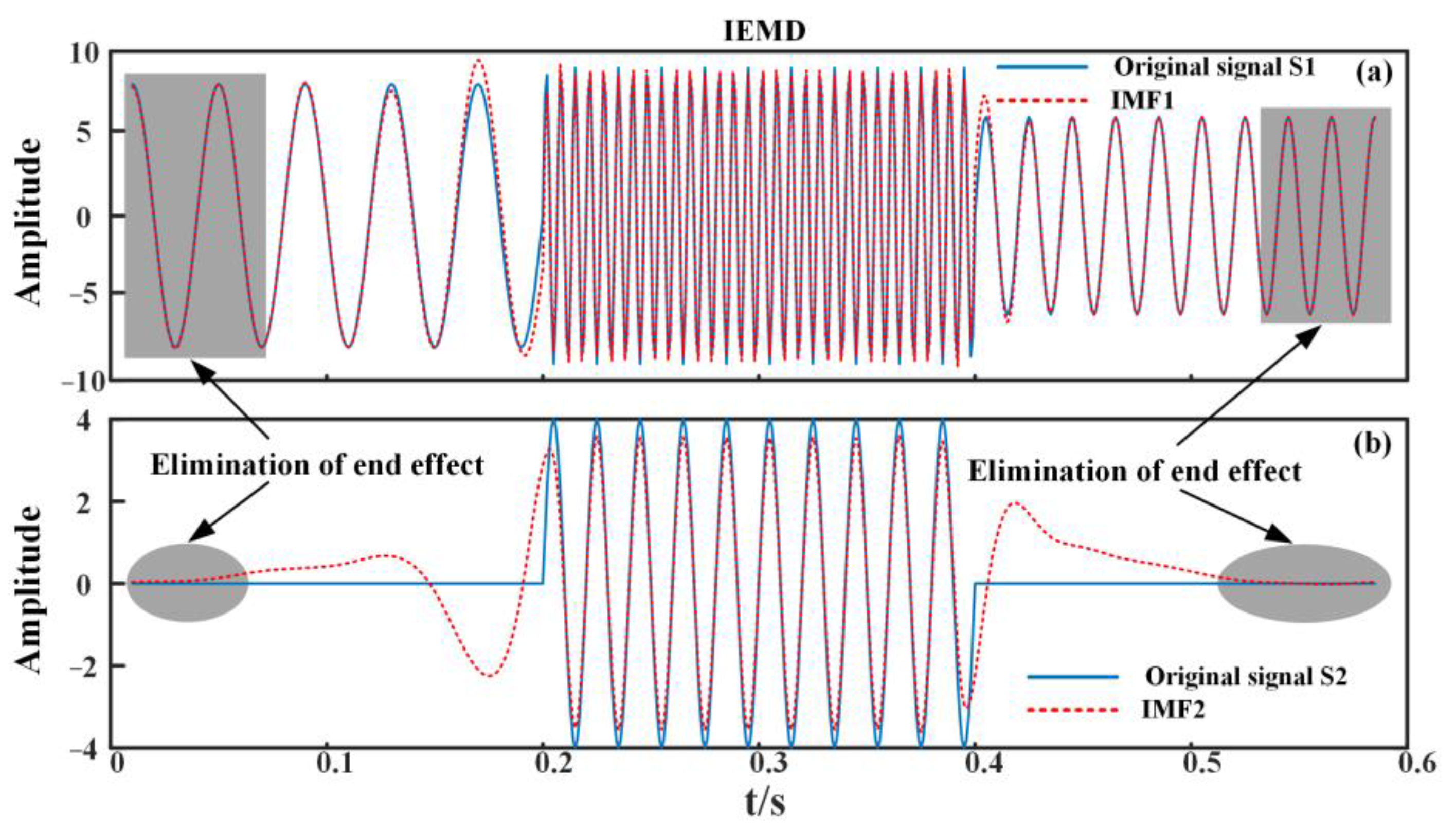
- In this paper, an extension method based on peak cross-correlation is proposed to improve the EMD algorithm (IEMD). Comparative analysis with traditional EMD and other extension methods validates that the IEMD algorithm effectively mitigates the end effects inherent in EMD.
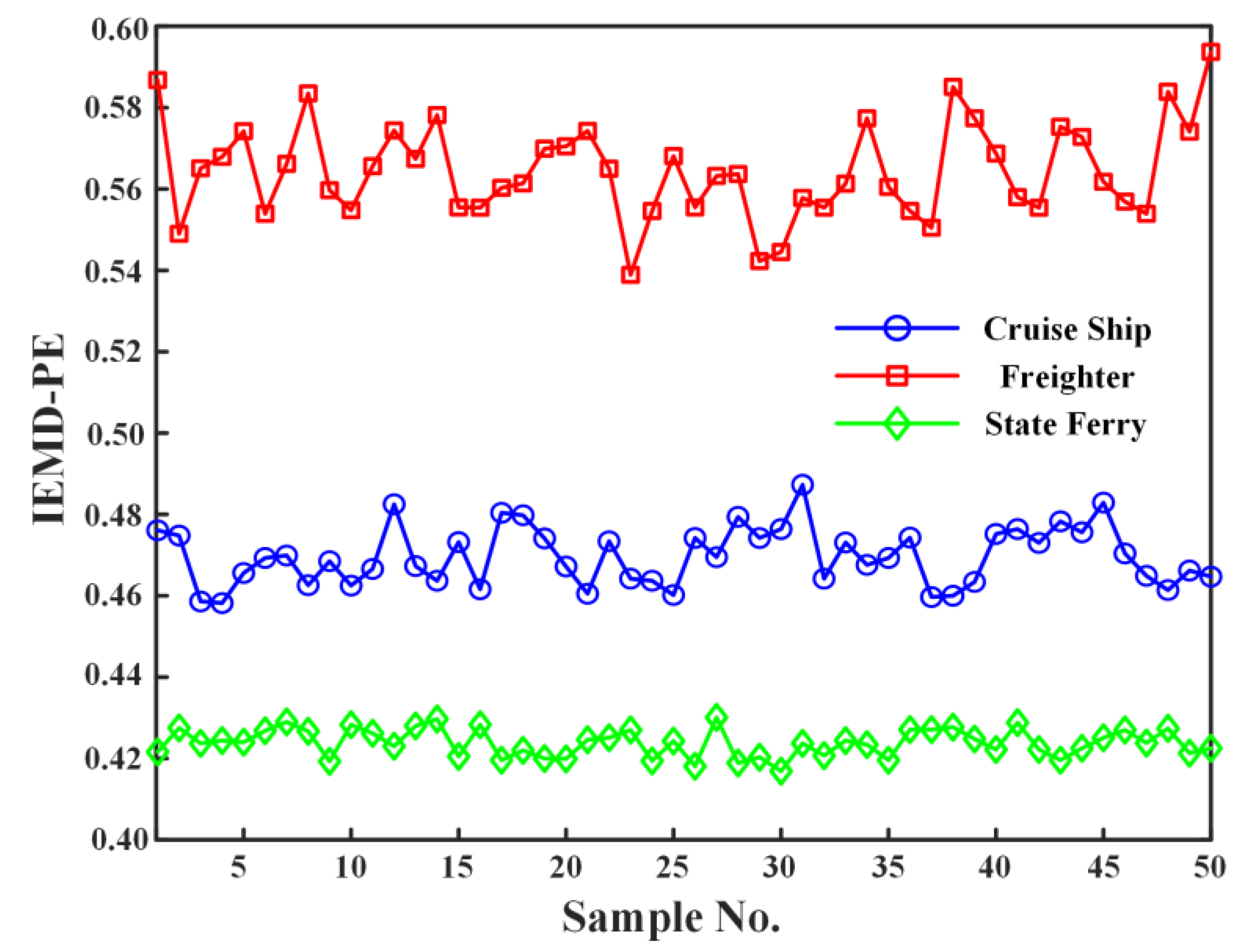
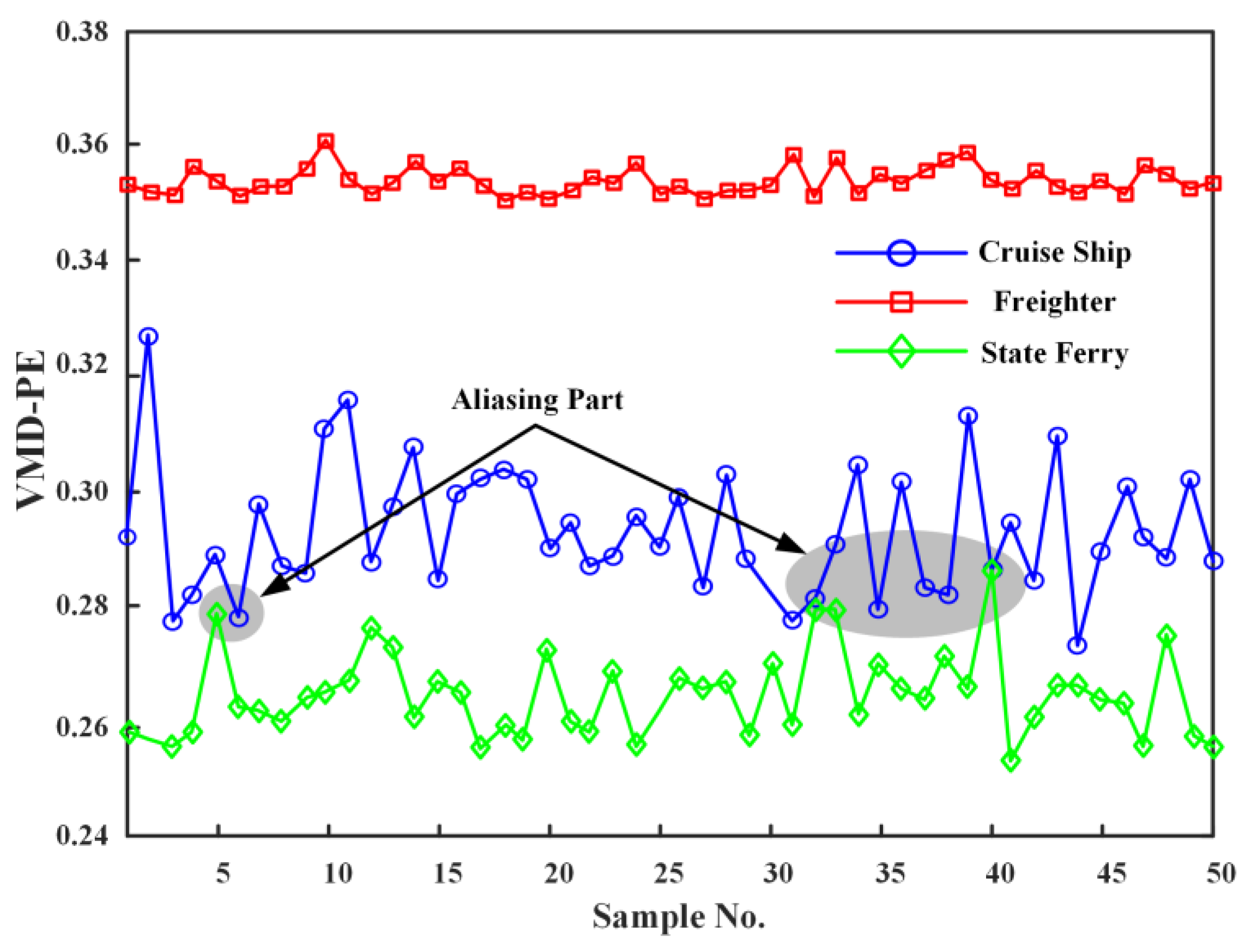
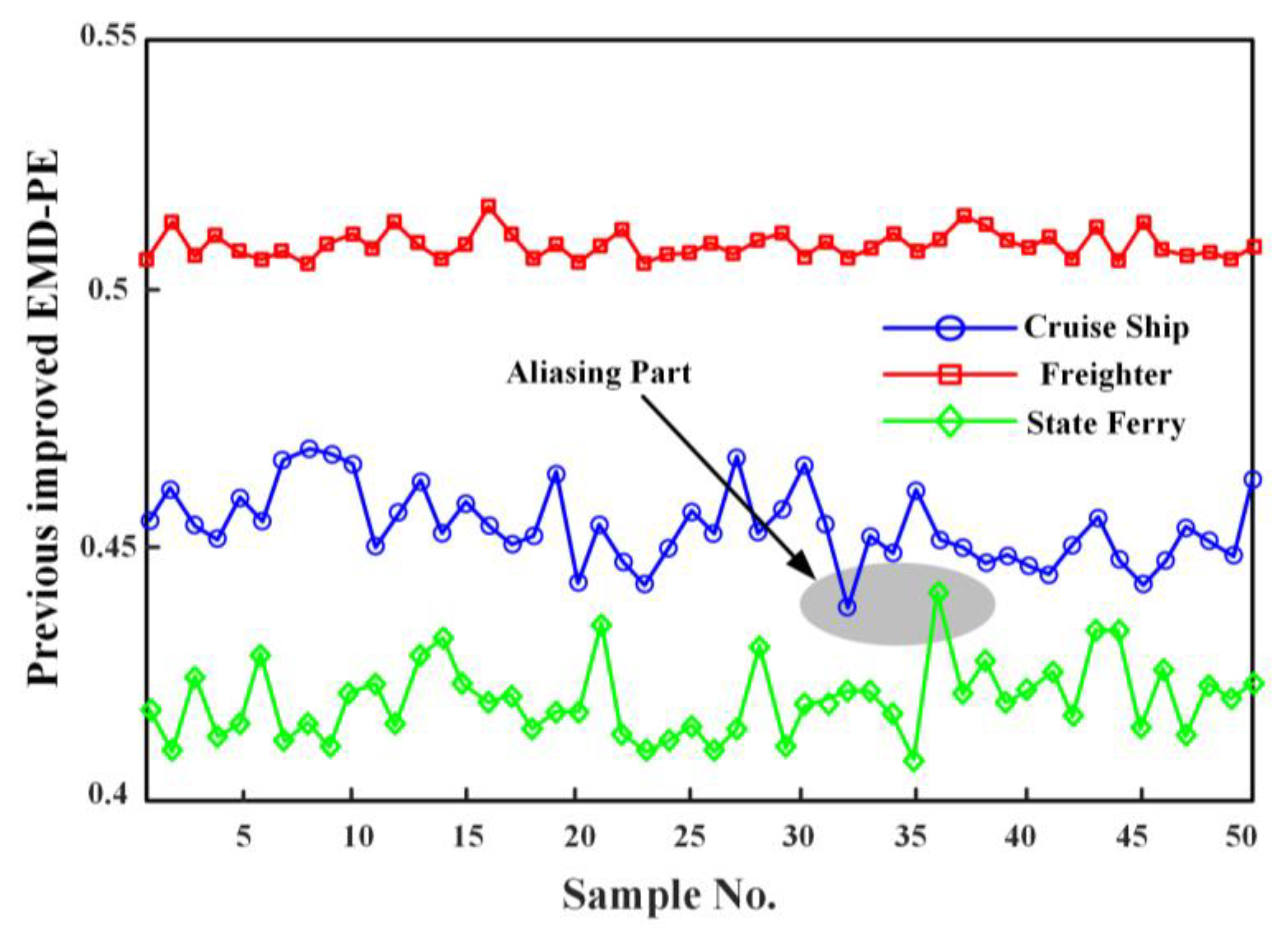
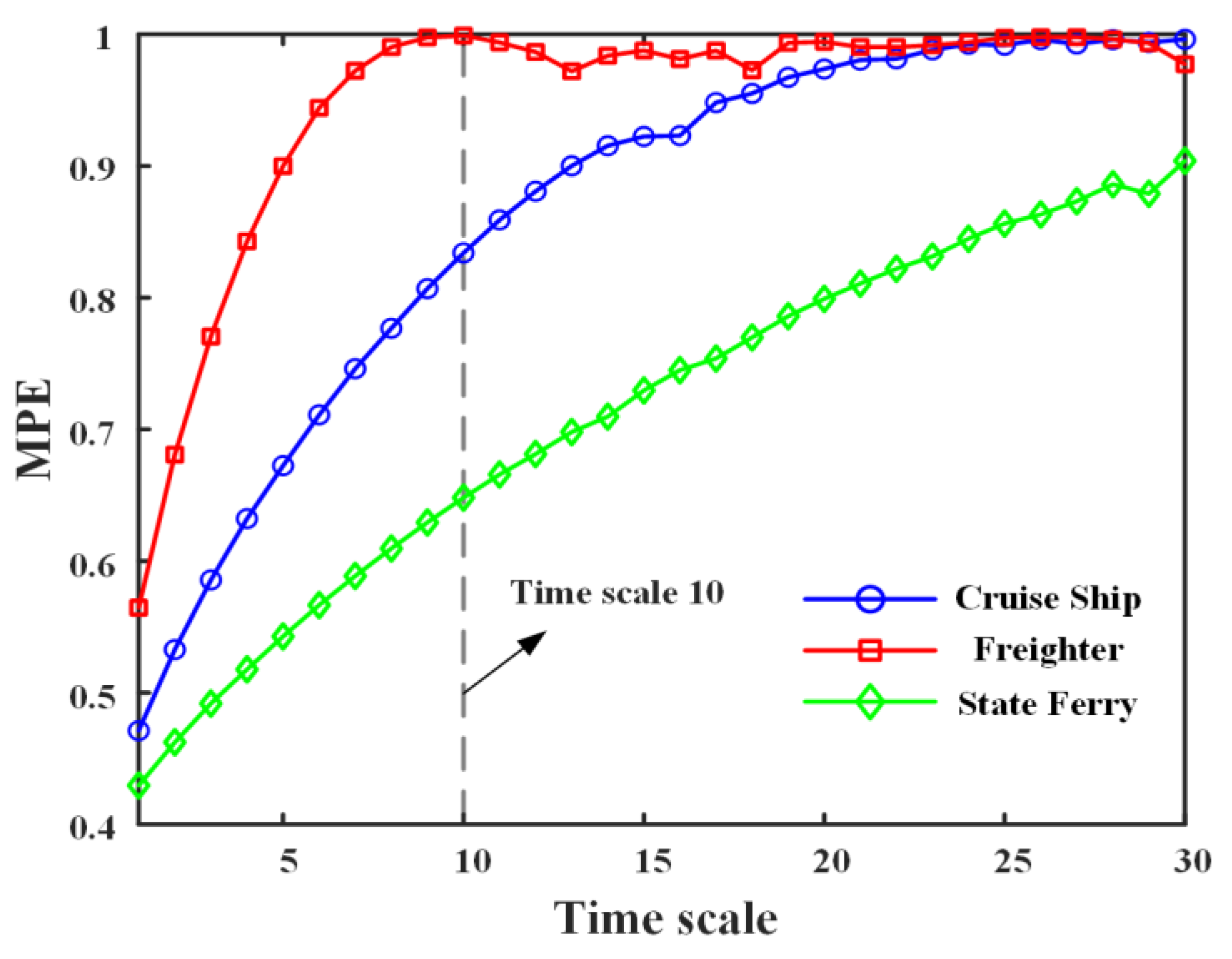
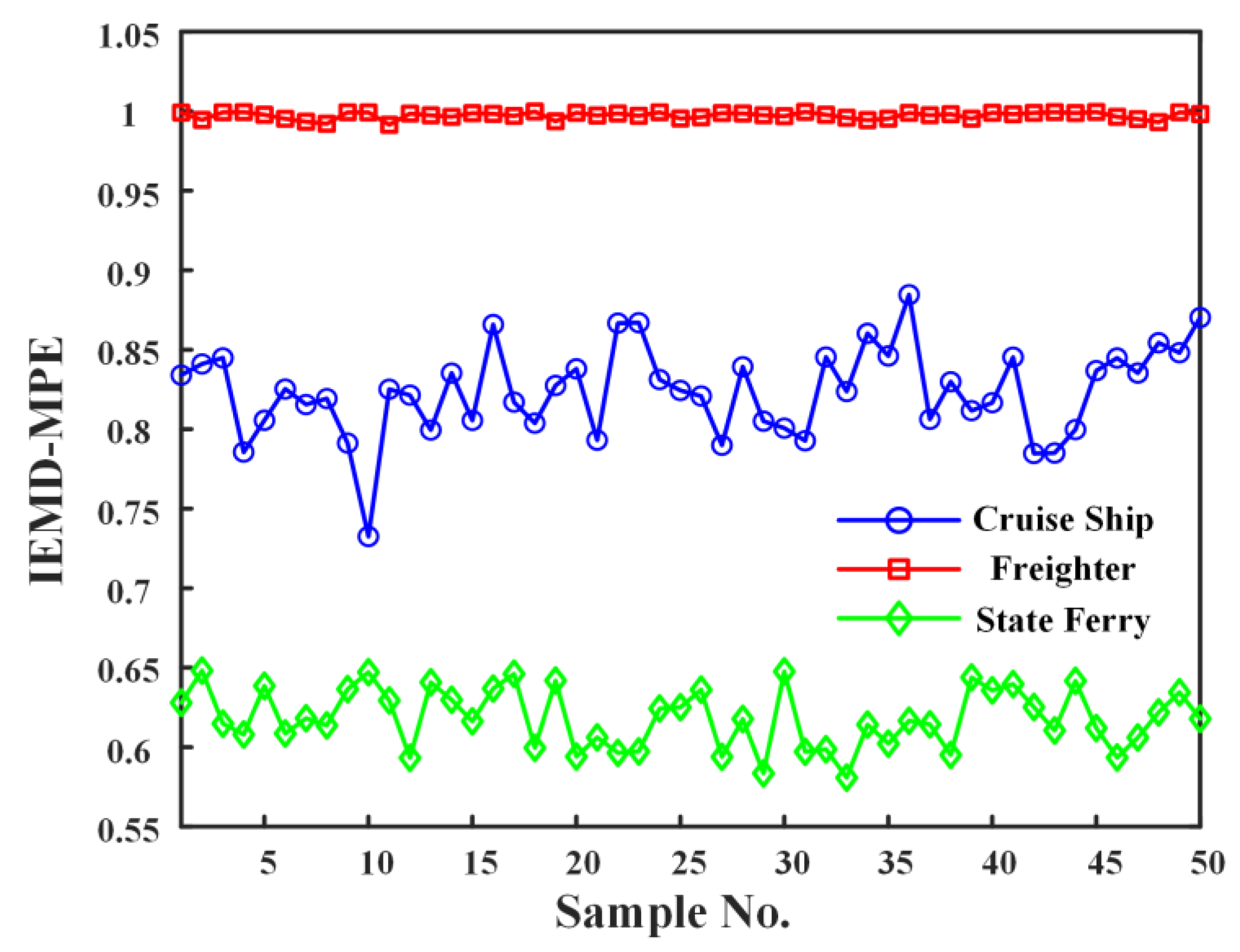
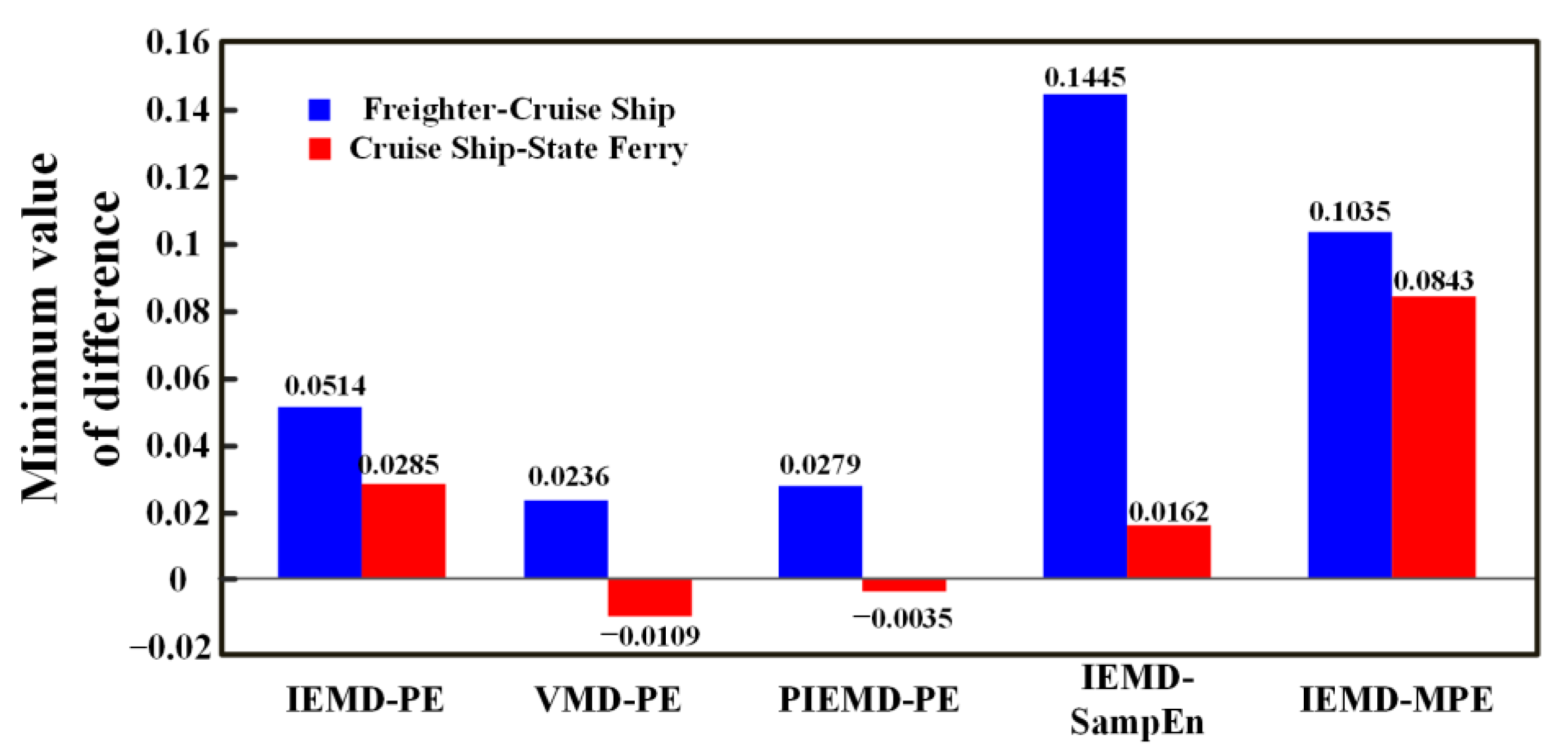
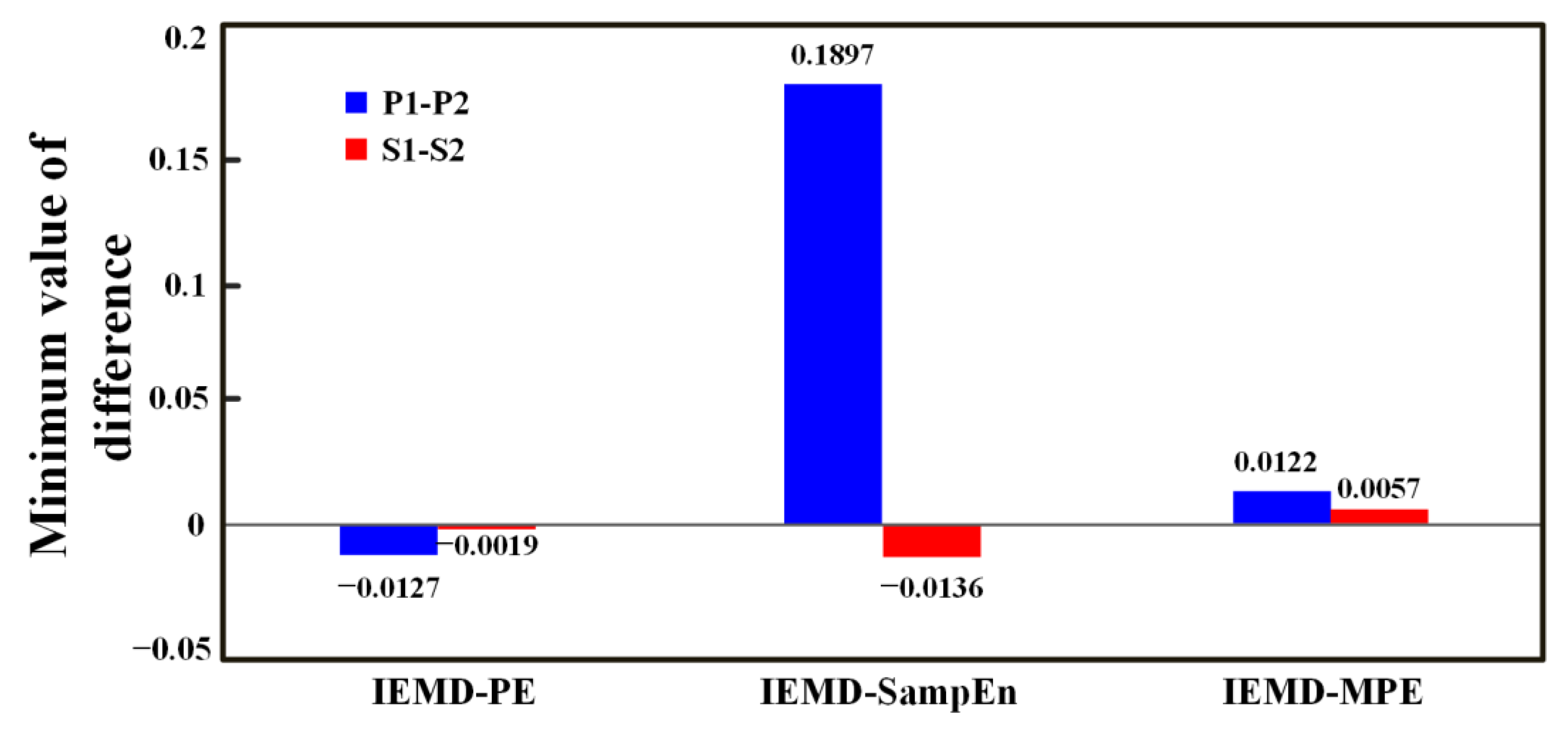
- An IEMD-based feature extraction method for noise signals is proposed and applied to three types of ship noise signals. Results demonstrate that the IEMD-PE, IEMD-SampEn, and IEMD-MPE methods achieve superior separability compared with the VMD-PE method. The MPE can describe the ship noise from multiple dimensions with strong separability. The IEMD-MPE method is significantly better than the feature extraction method of IEMD-PE and IEMD-SampEn, which can only describe the signal from a single scale, and the IEMD-MPE method improves the minimum difference distance by 101.36% to 212.98% over the IEMD-PE method.
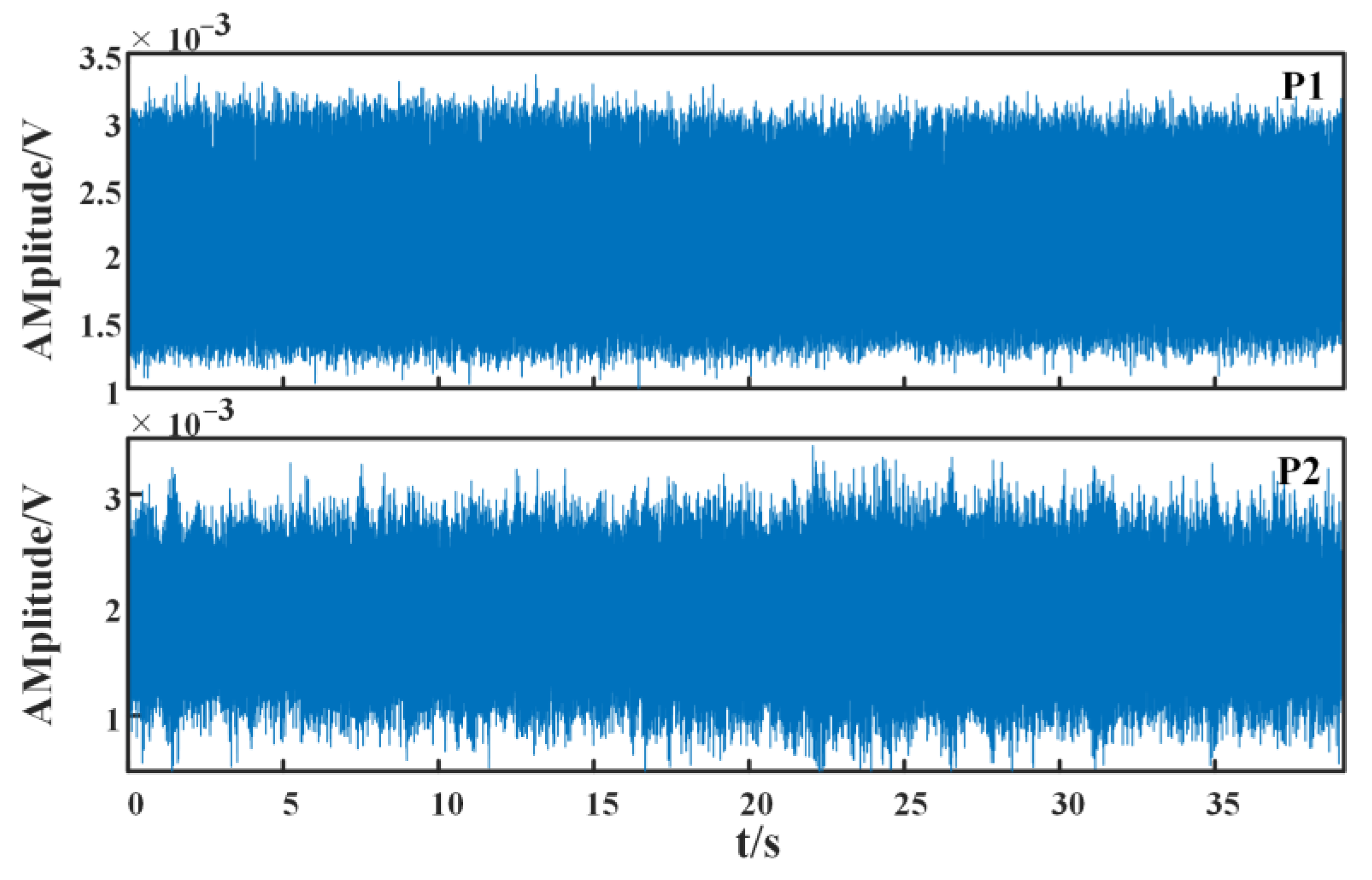
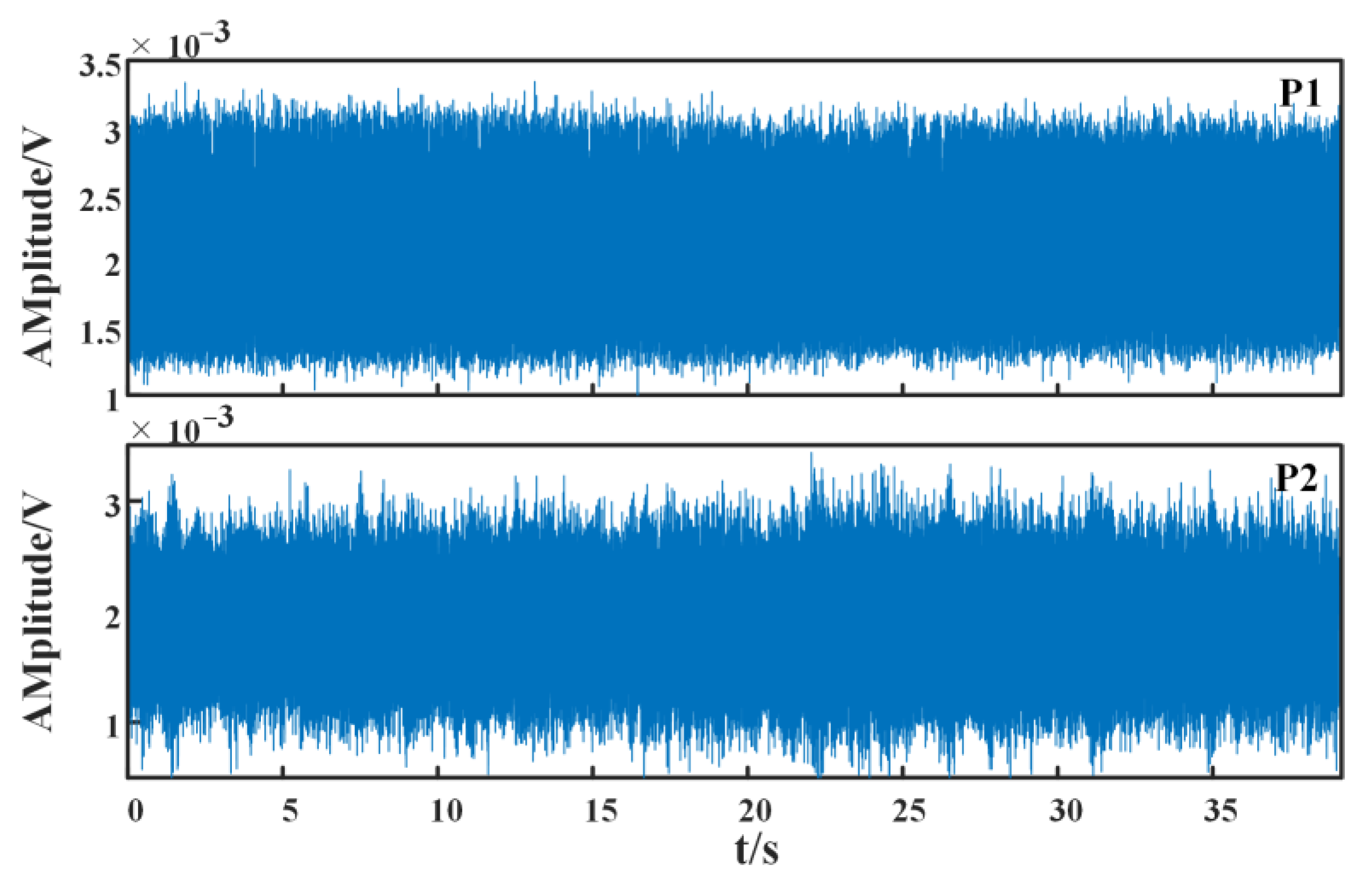
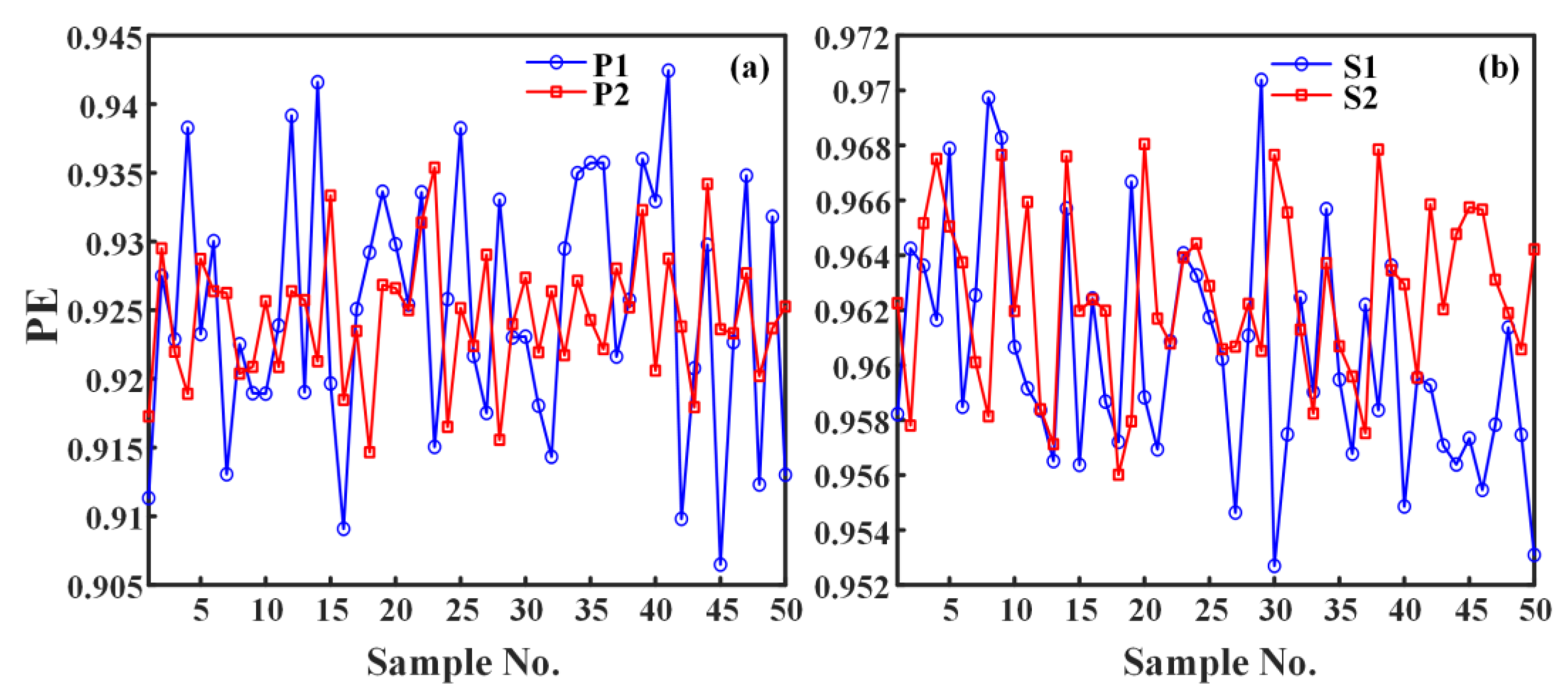
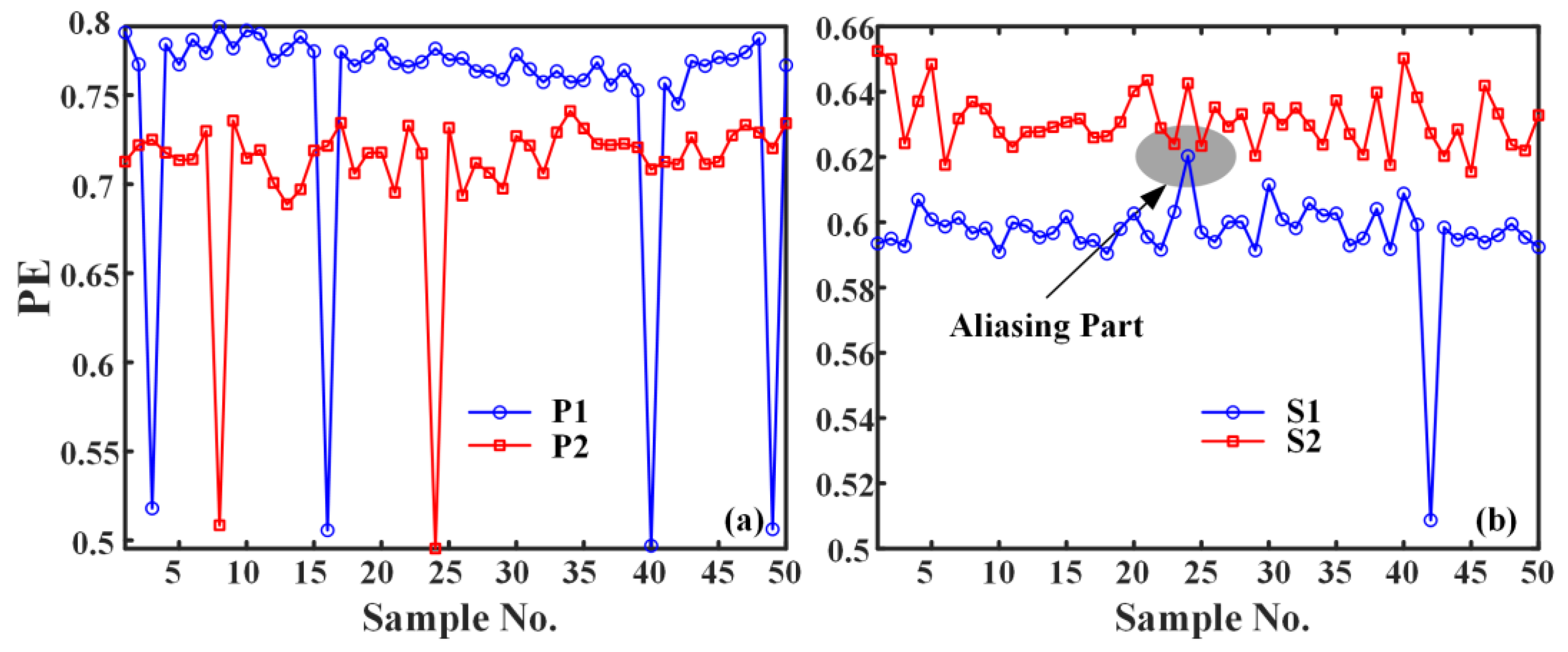
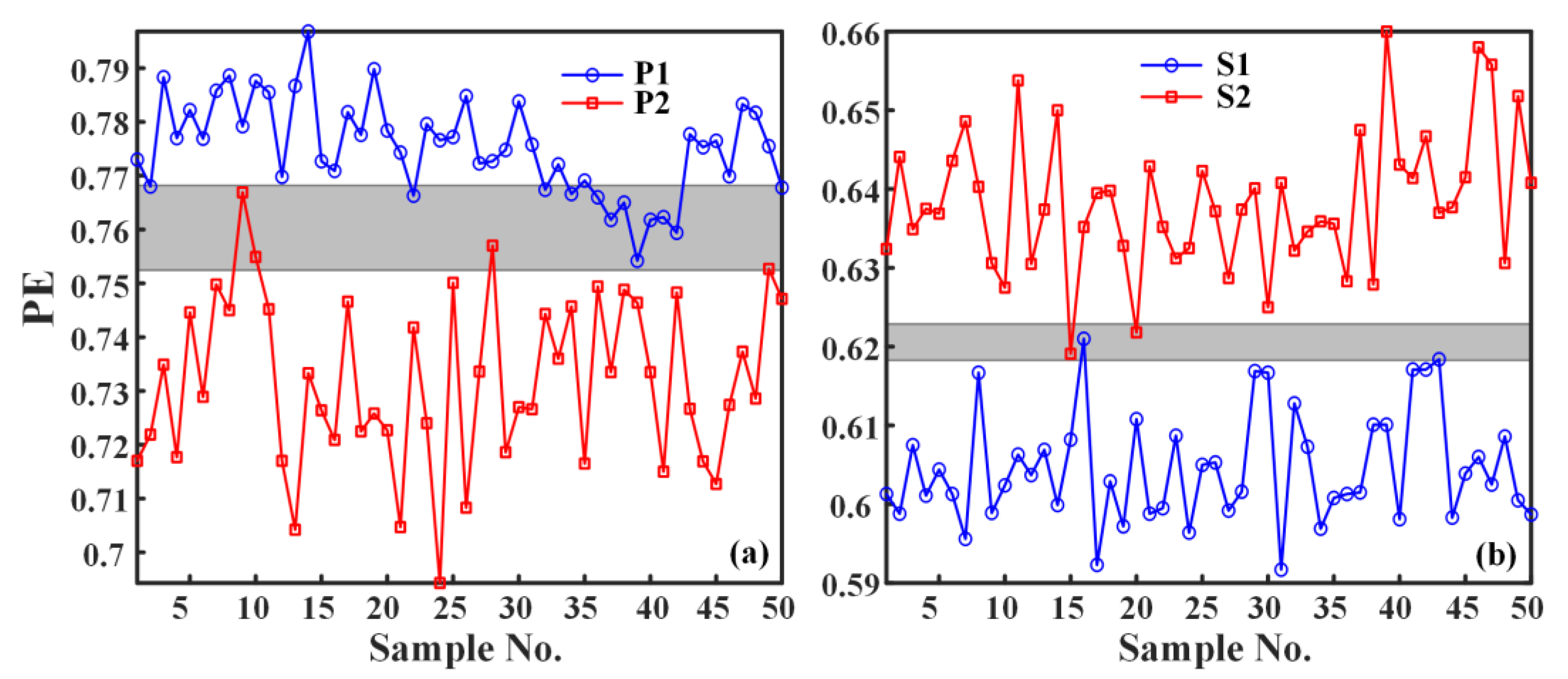
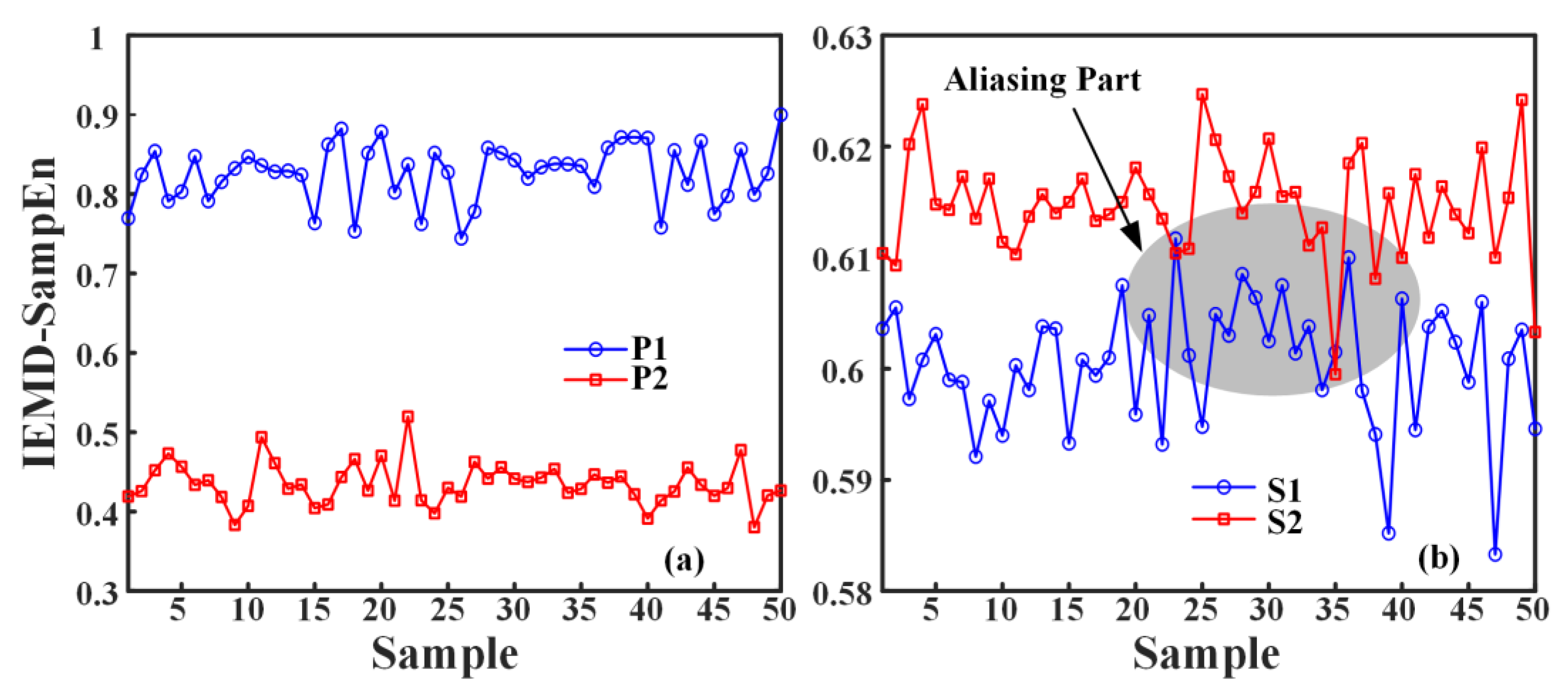
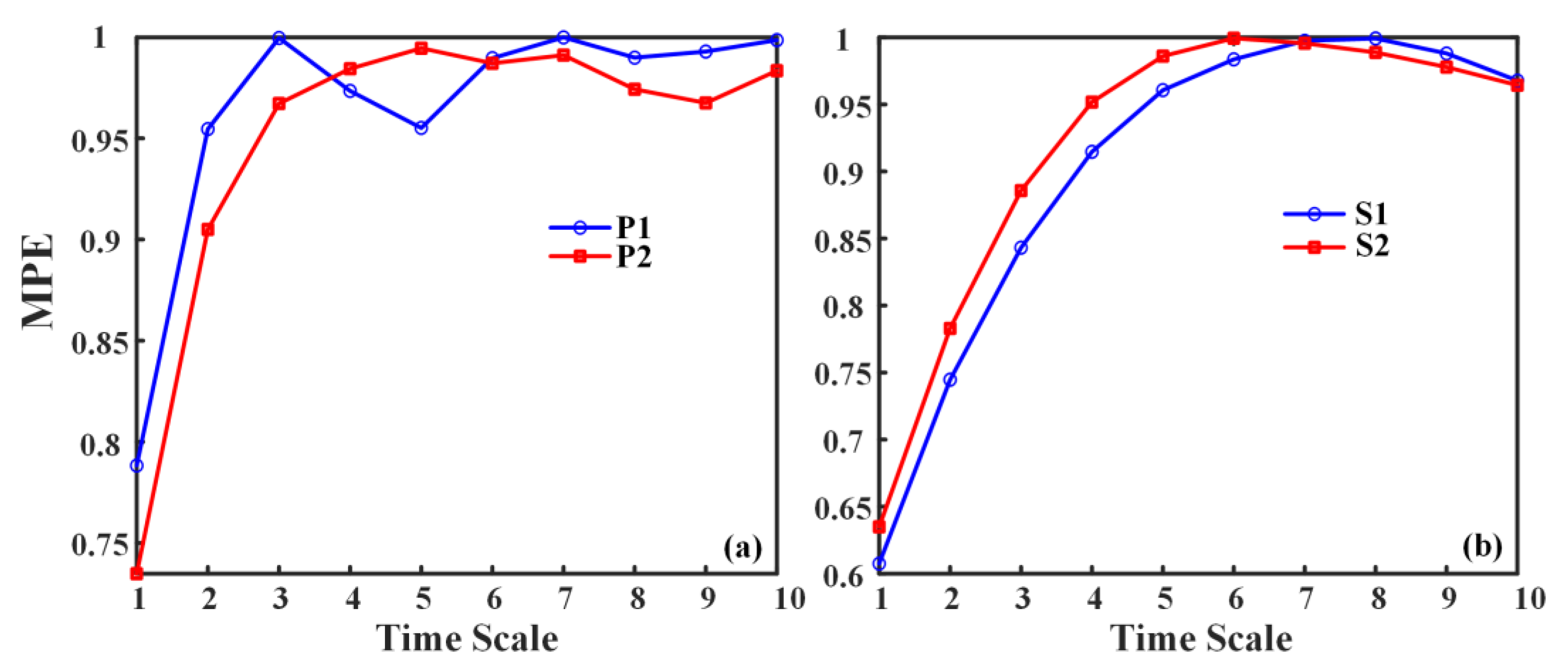
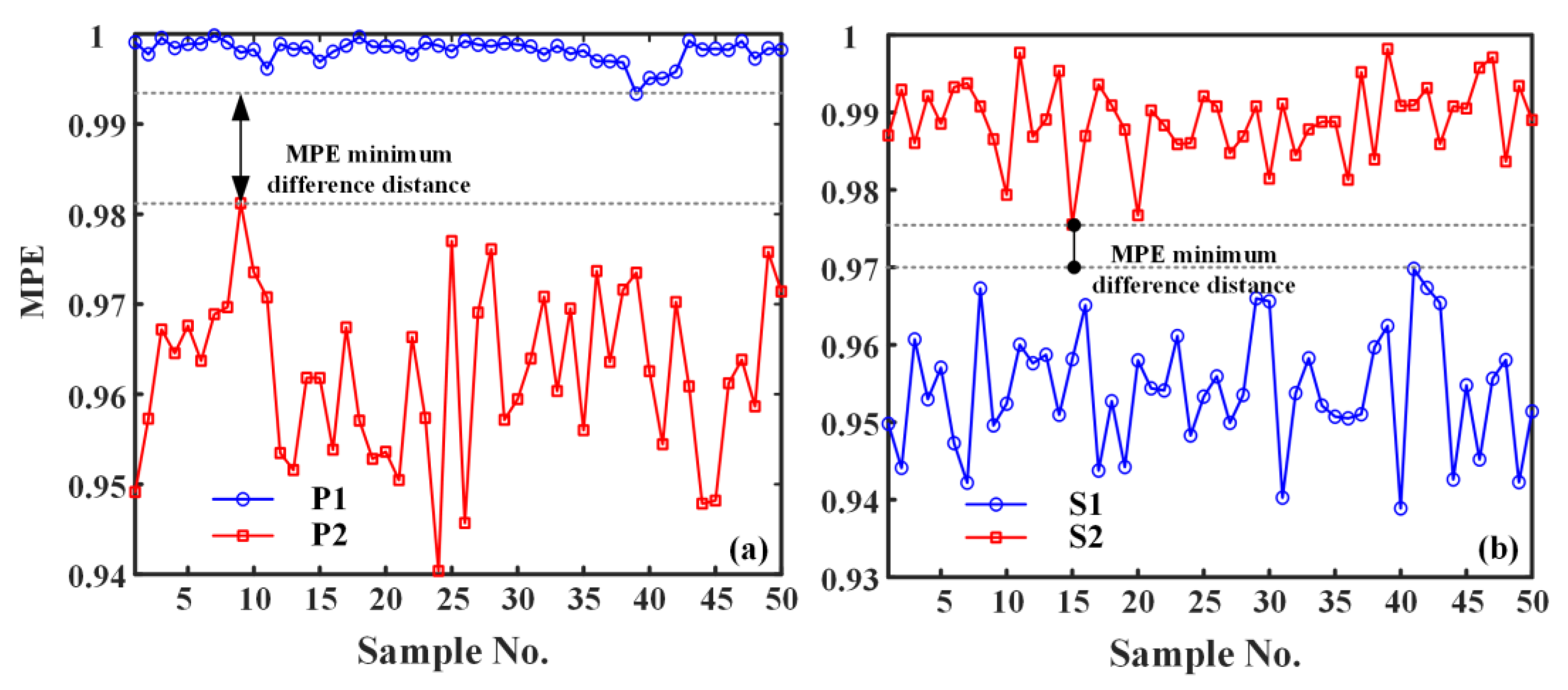
- To verify the effectiveness and generality of the methods proposed in this paper, IEMD-PE, IEMD-SampEn, and IEMD-MPE are applied to two sets of propulsive noise signals. Since the two sets of underwater thruster noise signals are very similar, the experimental results show that the previous IEMD-PE method is indistinguishable. The IEMD-SampEn has limited differentiation of the noise signals. The IEMD-MPE feature extraction method based on peak cross-correlation enhancement proposed in this paper is not only effective in distinguishing the underwater noise samples of the two propellers with different thrusts in the first group but also in distinguishing the very similar underwater noise signals of the propellers of the same thrust model at both high and low rotational speeds. The minimum difference between the IEMD-MPE feature extraction results of the two sets of experiments is 0.0814 and 0.0057 entropy units, respectively.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- He, Q.; Wang, H.; Zeng, X.; Jin, A. Ship-Radiated Noise Separation in Underwater Acoustic Environments Using a Deep Time-Domain Network. J. Mar. Sci. Eng. 2024, 12, 885. [Google Scholar] [CrossRef]
- Chen, Z.; Li, Y.; Chen, X. Underwater acoustic weak signal detection based on Hilbert transform and intermittent chaos. Acta Phys. Sin. 2015, 64, 200502. [Google Scholar] [CrossRef]
- Wang, Q.; Zeng, X.; Wang, L.; Wang, H.; Cai, H. Passive moving target classification via spectra multiplication method. IEEE Signal Process. Lett. 2017, 24, 451–455. [Google Scholar] [CrossRef]
- Mehdi, Z.; Nouri, N.M. A new analysis of flow noise outside the time-frequency representation using graph-based feature extraction. Ocean. Eng. 2022, 266, 112700. [Google Scholar] [CrossRef]
- Khobotov, A.G.; Kalinina, V.I.; Khil’ko, A.I.; Malekhanov, A.I. Underwater Acoustic Signal Detection against the Background of Non-Stationary Sea Noise. J. Mar. Sci. Eng. 2024, 12, 1540. [Google Scholar] [CrossRef]
- Niu, F.; Hui, J.; Zhao, A.; Cheng, Y.; Chen, Y. Application of SN-EMD in Mode Feature Extraction of Ship Radiated Noise. Math. Probl. Eng. 2018, 1, 2184612. [Google Scholar] [CrossRef]
- Wang, S.; Zeng, X. Robust underwater noise targets classification using auditory inspired time–frequency analysis. Appl. Acoust. 2014, 78, 68–76. [Google Scholar] [CrossRef]
- Wu, G.; Li, J.; Chen, Y.; Yuan, Y.; Chen, Y. Ship radiated-noise recognition (I) the overall framework, analysis and extraction of line-spectrum. ACTA Acust.-Peking 1998, 23, 394–400. [Google Scholar] [CrossRef]
- Yasin, Y.A.; Ahmad, Z.S. Improved signal de-noising in underwater acoustic noise using S-transform: A performance evaluation and comparison with the wavelet transform. J. Ocean. Eng. Sci. 2017, 2, 172–185. [Google Scholar] [CrossRef]
- Li, Y.; Li, Y.; Chen, X. Ships’ radiated noise feature extraction based on EEMD. J. Vib. Shock 2017, 36, 114–119. [Google Scholar] [CrossRef]
- Bao, F.; Li, C.; Wang, X.; Wang, Q.; Du, S. Ship classification using nonlinear features of radiated sound: An approach based on empirical mode decomposition. J. Acoust. Soc. Am. 2010, 128, 206–214. [Google Scholar] [CrossRef] [PubMed]
- Shannon, C.E. A mathematical theory of communication. Bell Syst. Tech. J. 1948, 27, 379–423. [Google Scholar] [CrossRef]
- Bandt, C.; Pompe, B. Permutation Entropy: A Natural Complexity Measure for Time Series. Phys. Rev. Letters 2002, 88, 174102. [Google Scholar] [CrossRef] [PubMed]
- Liu, X.; Li, J.; Zhao, G.; Liu, Y.; Lei, Q. Ship signal denoising and feature extraction based on IVMD-RPE. Tech. Acoustics 2023, 42, 297–305. [Google Scholar] [CrossRef]
- Li, Y.; Zhou, Y.; Jiao, S. Multi-scale ensemble dispersion Lempel-Ziv complexity and its application on feature extraction for ship-radiated noise. Appl. Acoustics 2024, 218, 109890. [Google Scholar] [CrossRef]
- Li, Y.; Li, Y.; Chen, X.; Yu, J. A novel feature extraction method for ship-radiated noise based on variational mode decomposition and multi-scale permutation entropy. Entropy 2017, 19, 342. [Google Scholar] [CrossRef]
- Liu, F.; Li, G.; Yang, H. Application of multi-algorithm mixed feature extraction model in underwater acoustic signal. Ocean. Eng. 2024, 296, 116959. [Google Scholar] [CrossRef]
- Chen, Z.; Li, Y. A study on complexity feature extraction of ship radiated signals based on a multi-scale permutation entropy method. J. Vib. Shock 2019, 38, 225–230. [Google Scholar] [CrossRef]
- Li, W.; Shen, X.; Li, Y. A comparative study of multiscale sample entropy and hierarchical entropy and its application in feature extraction for ship-radiated noise. Entropy 2019, 21, 793. [Google Scholar] [CrossRef]
- Yi, Y.; Li, Y.; Wu, J. Multi-scale permutation Lempel-Ziv complexity and its application in feature extraction for Ship-radiated noise. Front. Mar. Sci. 2022, 9, 1047332. [Google Scholar] [CrossRef]
- Li, Y.X.; Li, Y.A.; Chen, Z.; Chen, X. Feature extraction of ship-radiated noise based on permutation entropy of the intrinsic mode function with the highest energy. Entropy 2016, 18, 393. [Google Scholar] [CrossRef]
- Wu, Z.; Huang, N.E. Ensemble empirical mode decomposition: A noise-assisted data analysis method. Adv. Adapt. Data Anal. 2009, 1, 1–41. [Google Scholar] [CrossRef]
- Liu, Q. A method of line spectrum extraction based on global mean empirical mode decomposition. Ship Electron. Eng. 2020, 40, 40–42, 88. [Google Scholar]
- Mehdi, Z.; Nouri, N.M. A novel hybrid feature extraction approach of marine vessel signal via improved empirical mode decom-position and measuring complexity. Ocean. Eng. 2023, 271, 113727. [Google Scholar] [CrossRef]
- Huang, N.E.; Shen, Z.; Long, S.R.; Wu, M.C.; Shih, H.H.; Zheng, Q.; Yen, N.C.; Tung, C.C.; Liu, H.H. The empirical mode decomposition and the Hilbert spectrum for nonlinear and non-stationary time series analysis. Proc. R. Soc. Lond. Ser. A Math. Phys. Eng. Sci. 1998, 454, 903–995. [Google Scholar] [CrossRef]
- Lin, D.C.; Guo, Z.L.; An, F.P.; Zeng, F.L. Elimination of end effects in empirical mode decomposition by mirror image coupled with support vector regression. Mech. Syst. Signal Process. 2012, 31, 13–28. [Google Scholar] [CrossRef]
- Wang, J.; Liu, W.; Zhang, S. An approach to eliminating end effects of EMD through mirror extension coupled with support vector machine method. Pers. Ubiquitous Comput. 2019, 23, 443–452. [Google Scholar] [CrossRef]
- He, Z.; Shen, Y.; Wang, Q. Boundary extension for Hilbert–Huang transform inspired by gray prediction model. Signal Process. 2012, 92, 685–697. [Google Scholar] [CrossRef]
- León, F.P.; Heizmann, M. Strategies to detect non-linear similarities by means of correlation methods. Intell. Robot. Comput. Vis. XX Algorithms Tech. Act. Vis. 2001, 4572, 513–524. [Google Scholar] [CrossRef]
- Huang, N.E.; Chern, C.C.; Huang, K.; Salvino, L.W.; Long, S.R.; Fan, K.L. A new spectral representation of earthquake data: Hilbert spectral analysis of station TCU129, Chi-Chi, Taiwan, 21 September 1999. Bull. Seismol. Soc. Am. 2001, 91, 1310–1338. [Google Scholar] [CrossRef]
- Lu, T.; Chen, P.; Yeh, S.; Van, L. Multiple stopping criteria and high precision EMD architecture implementation for Hilbert-Huang transform. In Proceedings of the 2014 IEEE Biomedical Circuits and Systems Conference (BioCAS) Proceedings, Lausanne, Switzerland , 22–24 October 2014; IEEE: Piscataway, NJ, USA, 2014; pp. 200–203. [Google Scholar] [CrossRef]
- Ding, Y.; Liu, L.; Liu, S.; Yang, Y. Feature extraction of ship-radiated noise based on VMD and IMWPE. Ship Sci. Technol. 2023, 45, 121–127. [Google Scholar] [CrossRef]
- Azad, M.; Khaled, F.; Pavel, M.I. A novel approach to classify and convert 1D signal to 2D grayscale image implementing support vector machine and empirical mode decomposition algorithm. Int. J. Adv. Res. 2019, 7, 328–335. [Google Scholar] [CrossRef] [PubMed]
- Xie, D.; Esmaiel, H.; Sun, H.; Qi, J.; Qasem, Z.A.H. Feature extraction of ship-radiated noise based on enhanced variational mode decomposition, normalized correlation coefficient and permutation entropy. Entropy 2020, 22, 468. [Google Scholar] [CrossRef] [PubMed]
- Tang, G.; Wang, X.; He, Y.; Liu, S. Rolling bearing fault diagnosis based on variational mode decomposition and permutation entropy. In Proceedings of the 2016 13th International Conference on Ubiquitous Robots and Ambient Intelligence (URAI), Xi’an, China , 19–22 August 2016 ; IEEE: Piscataway, NJ, USA, 2016; pp. 626–631. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Extension Type | Extended Form |
|---|---|
| Zero signal Extension | |
| Periodic signal Extension | |
| Symmetric signal Extension |
| Method | IMF1 (RMSE) | IMF2 (RMSE) |
|---|---|---|
| EMD | 0.7118 | 0.7428 |
| Supplementary periodic signal | 0.5234 | 0.6192 |
| Supplemental zero signal | 0.3606 | 1.0765 |
| Supplementary symmetric signal | 0.8745 | 0.9484 |
| Peak cross-correlation-IEMD | 0.5349 | 0.7259 |
| Cruise Ship | Freighter | State Ferry | |
|---|---|---|---|
| IMF1 | 0.0338 | 4.2043 | 0.5898 |
| IMF2 | 0.0557 | 5.7173 | 3.0221 |
| IMF3 | 0.6402 | 6.4543 | 4.7652 |
| IMF4 | 9.0374 | 2.8473 | 2.7068 |
| IMF5 | 6.6014 | 2.5703 | 11.3309 |
| IEMD-PE | VMD-PE | PIEMD-PE | IEMD-SampEn | IEMD-MPE | ||
|---|---|---|---|---|---|---|
| Freighter | Minimum value | 0.5387 | 0.3521 | 0.5023 | 0.5006 | 0.9881 |
| Cruise Ship | Maximum value | 0.4873 | 0.3285 | 0.4744 | 0.3561 | 0.8846 |
| Minimum value | 0.4586 | 0.2734 | 0.4392 | 0.1347 | 0.7325 | |
| State Ferry | Maximum value | 0.4301 | 0.2843 | 0.4427 | 0.1185 | 0.6482 |
| IEMD-PE | IEMD-SampEn | IEMD-MPE | ||
|---|---|---|---|---|
| P1 | Minimum value | 0.7542 | 0.7225 | 0.9934 |
| P2 | Maximum value | 0.7669 | 0.5328 | 0.9812 |
| S2 | Minimum value | 0.6191 | 0.5985 | 0.9755 |
| S1 | Maximum value | 0.6210 | 0.6121 | 0.9698 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, P.; Dai, C.; Li, S.; Jin, H.; Liu, X.; Liu, G. A Feature Extraction Method of Ship Underwater Noise Using Enhanced Peak Cross-Correlation Empirical Mode Decomposition Method and Multi-Scale Permutation Entropy. J. Mar. Sci. Eng. 2024, 12, 2222. https://doi.org/10.3390/jmse12122222
Liu P, Dai C, Li S, Jin H, Liu X, Liu G. A Feature Extraction Method of Ship Underwater Noise Using Enhanced Peak Cross-Correlation Empirical Mode Decomposition Method and Multi-Scale Permutation Entropy. Journal of Marine Science and Engineering. 2024; 12(12):2222. https://doi.org/10.3390/jmse12122222
Chicago/Turabian StyleLiu, Peng, Chen Dai, Shuaiqiang Li, Hui Jin, Xinfu Liu, and Guijie Liu. 2024. "A Feature Extraction Method of Ship Underwater Noise Using Enhanced Peak Cross-Correlation Empirical Mode Decomposition Method and Multi-Scale Permutation Entropy" Journal of Marine Science and Engineering 12, no. 12: 2222. https://doi.org/10.3390/jmse12122222
APA StyleLiu, P., Dai, C., Li, S., Jin, H., Liu, X., & Liu, G. (2024). A Feature Extraction Method of Ship Underwater Noise Using Enhanced Peak Cross-Correlation Empirical Mode Decomposition Method and Multi-Scale Permutation Entropy. Journal of Marine Science and Engineering, 12(12), 2222. https://doi.org/10.3390/jmse12122222