

Enhanced Unmanned Surface Vehicle Path Planning Based on the Pair Barracuda Swarm Optimization Algorithm: Implementation and Performance in Thousand Island Lake


Abstract
1. Introduction
2. Related Work
2.1. USV Path Planning Methods
2.2. Swarm Intelligence Algorithms
3. Problem Modelling and Analysis
3.1. Problem Formulation
3.2. Environmental Modelling
3.3. Evaluation Indicators for Path Planning
4. Path Optimization Method Based on PBSO
4.1. PBSO Algorithm
4.2. Path Optimization Strategy
| Algorithm 1 Path optimization method based on PBSO |
|
5. Experimental Simulation and Analysis
5.1. Experimental Parameters
5.2. Comparison with State-of-the-Art Heuristic Methods
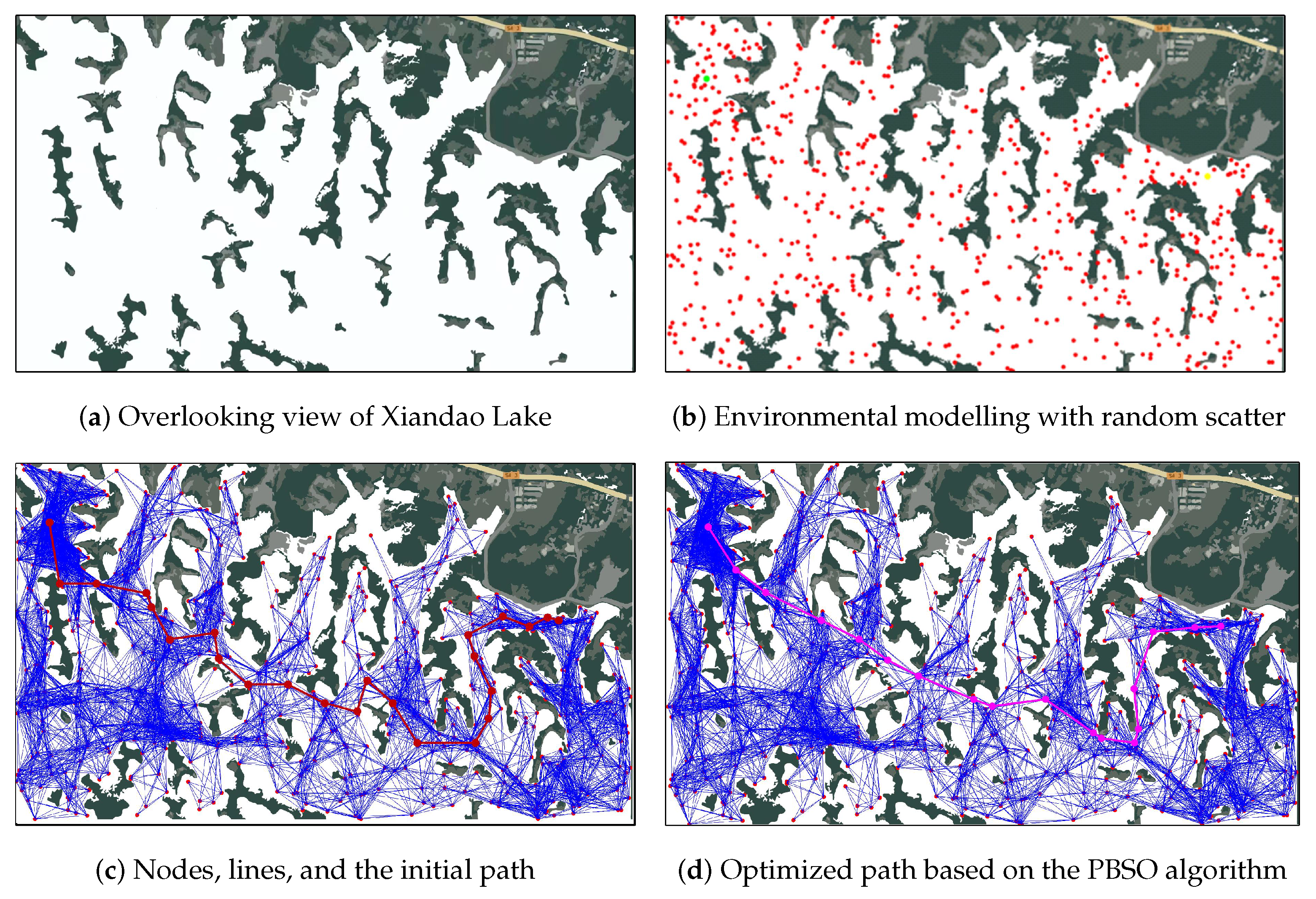
5.3. Real Case Experiments
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Cohen, S.A.; Hopkins, D. Autonomous vehicles and the future of urban tourism. Ann. Tour. Res. 2019, 74, 33–42. [Google Scholar] [CrossRef]
- Xu, X.; Zeng, J.; Zhao, Y.; Lü, X. Research on global path planning algorithm for mobile robots based on improved A. Expert Syst. Appl. 2023, 243, 122922. [Google Scholar] [CrossRef]
- Yu, K.; Liang, X.F.; Li, M.Z.; Chen, Z.; Yao, Y.L.; Li, X.; Zhao, Z.X.; Teng, Y. USV path planning method with velocity variation and global optimisation based on AIS service platform. Ocean Eng. 2021, 236, 109560. [Google Scholar] [CrossRef]
- Sang, H.; You, Y.; Sun, X.; Zhou, Y.; Liu, F. The hybrid path planning algorithm based on improved A* and artificial potential field for unmanned surface vehicle formations. Ocean Eng. 2021, 223, 108709. [Google Scholar] [CrossRef]
- Xie, L.; Xue, S.; Zhang, J.; Zhang, M.; Tian, W.; Haugen, S. A path planning approach based on multi-direction A* algorithm for ships navigating within wind farm waters. Ocean Eng. 2019, 184, 311–322. [Google Scholar] [CrossRef]
- Wang, S.; Fu, M.; Wang, Y.; Zhao, L. A multi-layered potential field method for waterjet propelled unmanned surface vehicle local path planning with minimum energy consumption. Pol. Marit. Res. 2019, 26, 134–144. [Google Scholar] [CrossRef]
- Fan, X.; Guo, Y.; Liu, H.; Wei, B.; Lyu, W. Improved artificial potential field method applied for AUV path planning. Math. Probl. Eng. 2020, 2020, 6523158. [Google Scholar] [CrossRef]
- Yan, X.P.; Wang, S.W.; Ma, F.; Liu, Y.C.; Wang, J. A novel path planning approach for smart cargo ships based on anisotropic fast marching. Expert Syst. Appl. 2020, 159, 113558. [Google Scholar] [CrossRef]
- Chen, Z.; Zhang, Y.; Zhang, Y.; Nie, Y.; Tang, J.; Zhu, S. A hybrid path planning algorithm for unmanned surface vehicles in complex environment with dynamic obstacles. IEEE Access 2019, 7, 126439–126449. [Google Scholar] [CrossRef]
- Hu, L.; Naeem, W.; Rajabally, E.; Watson, G.; Mills, T.; Bhuiyan, Z.; Raeburn, C.; Salter, I.; Pekcan, C. A multiobjective optimization approach for COLREGs-compliant path planning of autonomous surface vehicles verified on networked bridge simulators. IEEE Trans. Intell. Transp. Syst. 2019, 21, 1167–1179. [Google Scholar] [CrossRef]
- Zhao, L.; Bai, Y.; Paik, J.K. Global-local hierarchical path planning scheme for unmanned surface vehicles under dynamically unforeseen environments. Ocean Eng. 2023, 280, 114750. [Google Scholar] [CrossRef]
- Öztürk, Ü.; Akdağ, M.; Ayabakan, T. A review of path planning algorithms in maritime autonomous surface ships: Navigation safety perspective. Ocean Eng. 2022, 251, 111010. [Google Scholar] [CrossRef]
- Guo, J.; Zhou, G.; Yan, K.; Sato, Y.; Di, Y. Pair barracuda swarm optimization algorithm: A natural-inspired metaheuristic method for high dimensional optimization problems. Sci. Rep. 2023, 13, 18314. [Google Scholar] [CrossRef] [PubMed]
- Liu, S.; Wu, H. Analysis of the application of path finding system based on efficiency improvement in smart tourism. Intell. Syst. Appl. 2023, 20, 200265. [Google Scholar] [CrossRef]
- Niu, H.; Lu, Y.; Savvaris, A.; Tsourdos, A. An energy-efficient path planning algorithm for unmanned surface vehicles. Ocean Eng. 2018, 161, 308–321. [Google Scholar] [CrossRef]
- Niu, H.; Lu, Y.; Savvaris, A.; Tsourdos, A. Efficient path planning algorithms for unmanned surface vehicle. IFAC-PapersOnLine 2016, 49, 121–126. [Google Scholar] [CrossRef]
- Bai, X.; Li, B.; Xu, X.; Xiao, Y. USV path planning algorithm based on plant growth. Ocean Eng. 2023, 273, 113965. [Google Scholar] [CrossRef]
- Hao, S.; Ma, W.; Han, Y.; Zheng, H.; Ma, D. Optimal path planning of unmanned surface vehicle under current environment. Ocean Eng. 2023, 286, 115591. [Google Scholar] [CrossRef]
- Song, Z.; Zhang, J.; Wu, D.; Tian, W. A novel path planning algorithm for ships in dynamic current environments. Ocean Eng. 2023, 288, 116091. [Google Scholar] [CrossRef]
- Petres, C.; Pailhas, Y.; Patron, P.; Petillot, Y.; Evans, J.; Lane, D. Path planning for autonomous underwater vehicles. IEEE Trans. Robot. 2007, 23, 331–341. [Google Scholar] [CrossRef]
- Wang, N.; Jin, X.; Er, M.J. A multilayer path planner for a USV under complex marine environments. Ocean Eng. 2019, 184, 1–10. [Google Scholar] [CrossRef]
- Gu, Q.; Zhen, R.; Liu, J.; Li, C. An improved RRT algorithm based on prior AIS information and DP compression for ship path planning. Ocean Eng. 2023, 279, 114595. [Google Scholar] [CrossRef]
- Zhang, X.; Wang, C.; Liu, Y.; Chen, X. Decision-making for the autonomous navigation of maritime autonomous surface ships based on scene division and deep reinforcement learning. Sensors 2019, 19, 4055. [Google Scholar] [CrossRef] [PubMed]
- Wang, Y.; Lu, C.; Wu, P.; Zhang, X. Path planning for unmanned surface vehicle based on improved Q-Learning algorithm. Ocean Eng. 2024, 292, 116510. [Google Scholar] [CrossRef]
- Yoo, B.; Kim, J. Path optimization for marine vehicles in ocean currents using reinforcement learning. J. Mar. Sci. Technol. 2016, 21, 334–343. [Google Scholar] [CrossRef]
- Chen, M.; Zhu, D. Optimal time-consuming path planning for autonomous underwater vehicles based on a dynamic neural network model in ocean current environments. IEEE Trans. Veh. Technol. 2020, 69, 14401–14412. [Google Scholar] [CrossRef]
- Alvarez, A.; Caiti, A.; Onken, R. Evolutionary path planning for autonomous underwater vehicles in a variable ocean. IEEE J. Ocean. Eng. 2004, 29, 418–429. [Google Scholar] [CrossRef]
- Witt, J.; Dunbabin, M. Go with the flow: Optimal AUV path planning in coastal environments. In Proceedings of the Australian Conference on Robotics and Automation, Canberra, Australia, 3–5 December 2008. [Google Scholar]
- Lyridis, D.V. An improved ant colony optimization algorithm for unmanned surface vehicle local path planning with multi-modality constraints. Ocean Eng. 2021, 241, 109890. [Google Scholar] [CrossRef]
- Kennedy, J.; Eberhart, R. Particle swarm optimization. In Proceedings of the ICNN’95—International Conference on Neural Networks, Perth, Australia, 27 November–1 December 1995; pp. 1942–1948. [Google Scholar]
- Liang, X.; Li, W.; Zhang, Y.; Zhou, M. An adaptive particle swarm optimization method based on clustering. Soft Comput. 2015, 19, 431–448. [Google Scholar] [CrossRef]
- Xu, Y.; Pi, D. A reinforcement learning-based communication topology in particle swarm optimization. Neural Comput. Appl. 2020, 32, 10007–10032. [Google Scholar] [CrossRef]
- Guo, J.; Sato, Y. A pair-wise bare bones particle swarm optimization algorithm. In Proceedings of the 2017 IEEE/ACIS 16th International Conference on Computer and Information Science, Wuhan, China, 24–26 May 2017; pp. 353–358. [Google Scholar]
- Li, J.; Wan, L.; Huang, Z.; Chen, Y.; Tang, H. Hybrid Path Planning Strategy Based on Improved Particle Swarm Optimisation Algorithm Combined with DWA for Unmanned Surface Vehicles. J. Mar. Sci. Eng. 2024, 12, 1268. [Google Scholar] [CrossRef]
- Chen, G.; Luo, N.; Liu, D.; Zhao, Z.; Liang, C. Path planning for manipulators based on an improved probabilistic roadmap method. Robot. Comput.-Integr. Manuf. 2021, 72, 102196. [Google Scholar] [CrossRef]
- Guo, J.; Sato, Y. A Bare Bones Particle Swarm Optimization Algorithm with Dynamic Local Search. In Proceedings of the Advances in Swarm Intelligence: 8th International Conference, Fukuoka, Japan, 27 July–1 August 2017; pp. 158–165. [Google Scholar]
- Xiao, H.; Guo, J.; Shi, B.; Di, Y.; Pan, C.; Yan, K.; Sato, Y. A Twinning Memory Bare-Bones Particle Swarm Optimization Algorithm for No-Linear Functions. IEEE Access 2023, 11, 25768–25785. [Google Scholar] [CrossRef]
- Zhong, C.; Li, G.; Meng, Z. Beluga whale optimization: A novel nature-inspired metaheuristic algorithm. Knowl.-Based Syst. 2022, 251, 109215. [Google Scholar] [CrossRef]
- Sun, Y.; Guo, J.; Yan, K.; Di, Y.; Pan, C.; Shi, B.; Sato, Y. A deep memory bare-bones particle swarm optimization algorithm for single-objective optimization problems. PLoS ONE 2023, 18, e0284170. [Google Scholar] [CrossRef] [PubMed]
- Guo, J.; Zhou, G.; Di, Y.; Shi, B.; Yan, K.; Sato, Y. A Bare-Bones Particle Swarm Optimization with Crossed Memory for Global Optimization. IEEE Access 2023, 11, 31549–31568. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Map1 | Map2 | Map3 | Map4 |
|---|---|---|---|---|
| Map size (unit: km) | 6 × 6 | 10 × 6 | 10 × 10 | 100 × 100 |
| Number of obstacles | 2 | 5 | 10 | 30 |
| Starting point location | [4, 1] | [4, 1] | [7, 1] | [4, 1] |
| Target point location | [1.5, 5.9] | [1.5, 8.9] | [1.5, 8.9] | [91.5, 89.9] |
| Number of particle swarms | 100 | 100 | 100 | 100 |
| Iterations | 500 | 500 | 500 | 500 |
| Parameters | Unit | PSO | BBPSO | TMBBPSO | WOA | DMBBPSO | CM-BBPSO | PBSO | |
|---|---|---|---|---|---|---|---|---|---|
| Map1 | TND | km | 5.517 | 5.510 | 5.511 | 5.510 | 6.404 | 5.510 | 5.510 |
| NT | – | 4 | 2 | 2 | 2 | 3 | 2 | 2 | |
| ATA | ° | 27.825 | 14.332 | 14.308 | 13.684 | 78.933 | 13.771 | 13.483 | |
| MSD | km | 1.695 | 1.864 | 2.086 | 1.583 | 2.215 | 1.742 | 2.083 | |
| Map2 | TND | km | 9.483 | 8.349 | 8.348 | 8.348 | 9.155 | 8.348 | 8.348 |
| NT | – | 5 | 2 | 2 | 4 | 2 | 2 | 2 | |
| ATA | ° | 240.163 | 23.531 | 22.408 | 23.556 | 63.529 | 22.923 | 48.683 | |
| MSD | km | 2.832 | 2.846 | 3.356 | 2.751 | 3.522 | 2.613 | 3.798 | |
| Map3 | TND | km | 10.542 | 9.717 | 9.718 | 9.718 | 9.718 | 9.718 | 9.716 |
| NT | – | 5 | 3 | 3 | 2 | 2 | 2 | 2 | |
| ATA | ° | 151.607 | 17.337 | 16.986 | 16.699 | 16.917 | 17.112 | 17.159 | |
| MSD | km | 3.638 | 4.773 | 3.367 | 4.224 | 3.721 | 4.280 | 4.833 | |
| Map4 | TND | km | 143.753 | 151.229 | 150.961 | 126.614 | 128.218 | 128.071 | 126.454 |
| NT | – | 5 | 3 | 3 | 4 | 3 | 3 | 3 | |
| ATA | ° | 302.495 | 84.325 | 83.073 | 63.090 | 73.613 | 56.302 | 51.292 | |
| MSD | km | 3.753 | 5.337 | 5.267 | 3.779 | 5.009 | 3.945 | 5.616 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shi, B.; Liu, Z.; He, Z.; Wang, C.; Guo, J. Enhanced Unmanned Surface Vehicle Path Planning Based on the Pair Barracuda Swarm Optimization Algorithm: Implementation and Performance in Thousand Island Lake. J. Mar. Sci. Eng. 2024, 12, 2189. https://doi.org/10.3390/jmse12122189
Shi B, Liu Z, He Z, Wang C, Guo J. Enhanced Unmanned Surface Vehicle Path Planning Based on the Pair Barracuda Swarm Optimization Algorithm: Implementation and Performance in Thousand Island Lake. Journal of Marine Science and Engineering. 2024; 12(12):2189. https://doi.org/10.3390/jmse12122189
Chicago/Turabian StyleShi, Binghua, Zeyu Liu, Zhou He, Chen Wang, and Jia Guo. 2024. "Enhanced Unmanned Surface Vehicle Path Planning Based on the Pair Barracuda Swarm Optimization Algorithm: Implementation and Performance in Thousand Island Lake" Journal of Marine Science and Engineering 12, no. 12: 2189. https://doi.org/10.3390/jmse12122189
APA StyleShi, B., Liu, Z., He, Z., Wang, C., & Guo, J. (2024). Enhanced Unmanned Surface Vehicle Path Planning Based on the Pair Barracuda Swarm Optimization Algorithm: Implementation and Performance in Thousand Island Lake. Journal of Marine Science and Engineering, 12(12), 2189. https://doi.org/10.3390/jmse12122189