1. Introduction
With the continuous advancement in underwater target detection technology, bistatic sonar technology has become a research hotspot in related fields. Compared with monostatic sonar systems, bistatic sonar systems have significant advantages such as strong concealment, high anti-interference ability, and wide detection range [
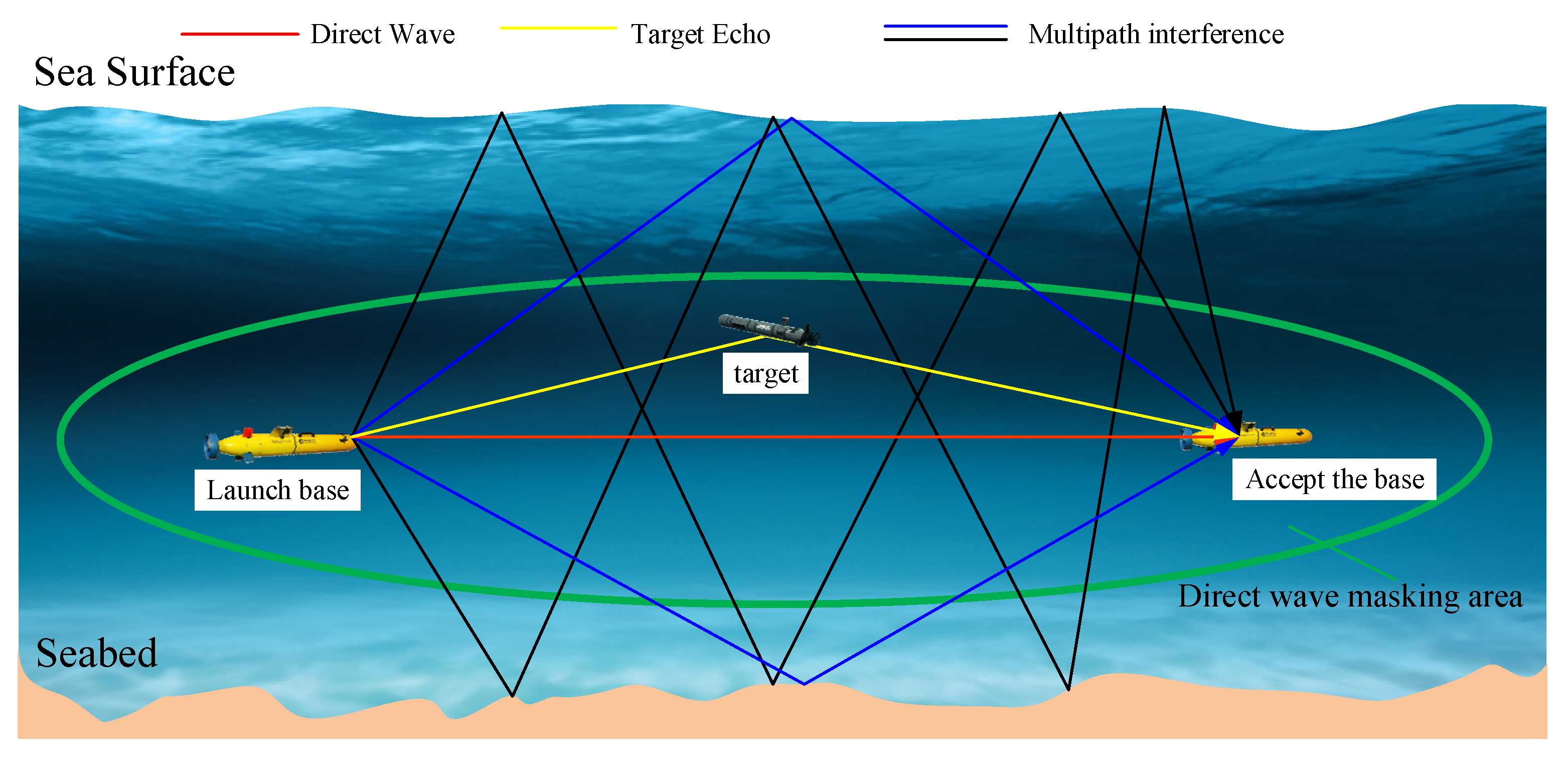
1]. However, when the bi-/multi-static sonar system is in operation, the direct waves from the transmitting base, i.e., the sound waves emitted by the transmitting base and transmitted directly to the receiving base, will interfere with the target echo and even mask it [
2]. Especially when the target is in the direct wave-masking area, the direct wave overlaps with the target echo in the time domain, making it difficult to separate them in the time domain [
3]. In addition, due to the much shorter propagation path of the direct wave compared to the target echo, its intensity is much greater than that of the echo signal. Moreover, it has a certain correlation with the target echo, which causes serious interference to the detection and positioning of the target [
4]. To solve this problem, adaptive filters are widely used in the cancellation process of direct waves due to their excellent performance. When applying adaptive filters for direct wave cancellation, the core task is to accurately estimate the characteristics of the direct wave channel and quickly adapt to the dynamic changes of the channel. This process requires the filter to have a high degree of flexibility and accuracy to ensure effective tracking of changes in direct wave signals and real-time cancellation in the ever-changing underwater environment. Through this method, the impact of direct waves on target echoes can be significantly reduced, thereby improving the system’s ability to detect and locate underwater targets.
Recursive Least Squares (RLS) Adaptive Filter is a widely used algorithm for channel estimation [
5]. The traditional RLS algorithm performs effectively in static channels, but its estimation accuracy diminishes in practical scenarios where channels are time varying. For example, in sea or lake environments, surface fluctuations often cause rapid changes in channel conditions [
6]. In such dynamic cases, the performance of the classic RLS algorithm in channel estimation significantly decreases. To address this, recent research has focused on improving the adaptability of the RLS algorithm for fast time-varying channels, drawing insights from adaptive filtering and evolutionary approaches in other fields. Techniques such as spectral-kurtosis-based filtering and adaptive mutation strategies, used in fault detection [
7] and defect identification [
8], respectively, have inspired similar adaptive approaches in RLS algorithms to optimize estimation under complex conditions. These studies support the development of advanced RLS variants with enhanced accuracy and robustness in fluctuating environments.
Zakharov et al. proposed the Divisional Coordinate Descent (DCD) algorithm [
9], which reduces the complexity of the algorithm by avoiding complex matrix inversion operations and relying only on addition and shift operations, thereby improving real-time performance. However, although the DCD method significantly improves the efficiency of RLS, simple complexity reduction cannot meet the demand for fast response to channel changes in fast time-varying channel environments. To this end, a sliding window mechanism is introduced, and the SRLS algorithm enhances the tracking ability of time-varying channels by limiting the length of input data [
10]. Especially, the SRLS-P algorithm further optimizes its adaptability to time-varying channels by introducing parabolic approximation. However, its computational complexity is still high, and noise accumulation may reduce the estimation accuracy of the algorithm, limiting its performance in high-noise environments. In contrast, Gaussian windows, due to their sidelobe-free spectral characteristics and good smoothness and continuity, can more effectively adapt to the dynamic changes of the channel and reduce sensitivity to abrupt signals. Based on these advantages, this study selects a Gaussian window as the sliding window, aiming to improve the channel estimation performance of the RLS algorithm.
In the paper, we introduce the Variable Gaussian Sliding RLS (VGSRLS) algorithm, based on time-varying Gaussian sliding windows, to address the channel estimation problem posed by the fast time-varying nature of direct wave channels. Traditional fixed-window-length algorithms often struggle to achieve the optimal balance between time and frequency resolution in complex channel environments, leading to decreased estimation accuracy. To tackle this issue, we have designed an adaptive window length adjustment mechanism based on the instantaneous frequency change rate of the signal: when the instantaneous frequency change rate is low, the window length is increased to enhance frequency resolution and processing efficiency; conversely, when the instantaneous frequency change rate is high, the window length is reduced to improve temporal resolution. By dynamically adjusting the Gaussian window length, the algorithm’s accuracy in channel estimation can be significantly improved. To significantly improve the algorithm’s noise suppression capability, we introduce a novel multi-level noise-suppression framework in VGSRLS, which adaptively optimizes the orientation of the Gaussian window using a rotation matrix to ensure alignment with the highest signal-to-noise ratio (SNR) direction within each time frame. Additionally, VGSRLS incorporates an anisotropy factor and a unique dynamic window length adjustment mechanism, which jointly adapt the Gaussian window shape by scaling it along the high-SNR direction. This multi-dimensional adjustment achieves an optimized trade-off between time and frequency resolution, allowing the algorithm to effectively capture rapid variations in non-stationary signals. This multi-dimensional adaptive adjustment strategy, along with the innovative multi-level noise-suppression framework, greatly enhances VGSRLS’s ability to capture fine signal details while achieving substantial improvements in noise resilience, distinguishing it from traditional RLS approaches. To reduce the computational complexity of the VGSRLS algorithm, we employ the DCD algorithm to iteratively solve for the channel estimation values.
3. Time-Varying Gaussian Sliding Window RLS Algorithm
In the system model defined above, the RLS algorithm minimizes the cost function at time n as follows:
where
is the window function and
is the error signal. Due to the multipath effects of underwater acoustic channels and environmental changes such as water flow and temperature gradients, the channel characteristics can rapidly change. The fixed-window-length RLS algorithm has difficulty responding to these changes in a timely manner, which affects the accuracy of channel estimation. To conclude, this article designs a time-varying Gaussian window that automatically adjusts the window length based on the instantaneous frequency change rate of the signal at different time points and combines anisotropy factors to adaptively adjust the shape of the Gaussian window to better adapt to complex channel changes and improve the accuracy of channel estimation.
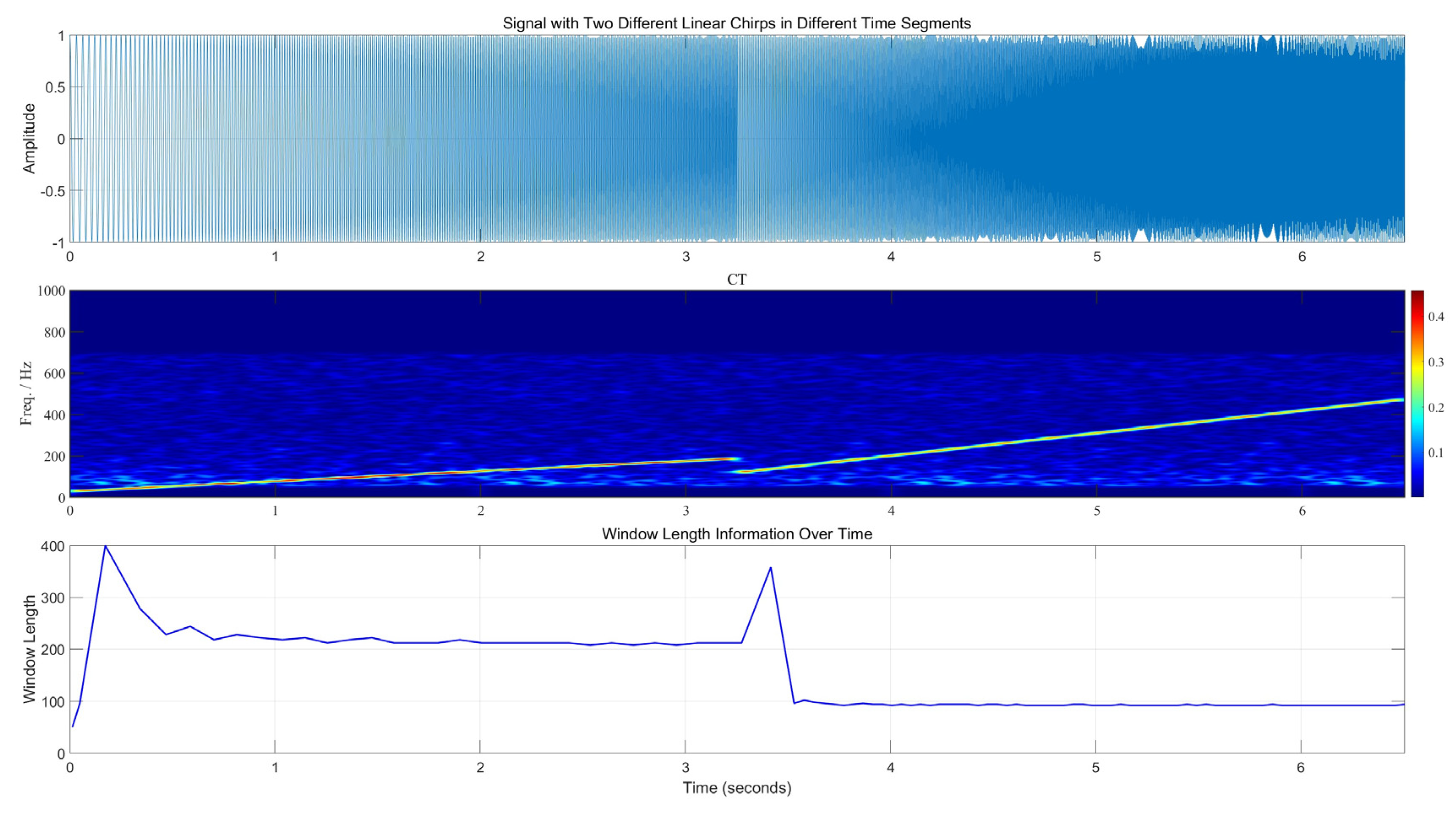
The effectiveness of the Chirplet Transform for non-stationary signals is primarily attributed to its control over the frequency modulation rate. The frequency modulation rate determines how rapidly the Chirplet’s frequency changes, allowing it to flexibly adapt to the time-varying frequency characteristics of the signal. The Chirplet Transform (CT) [
11] variation of discrete signals can be expressed as the inner product of signal y(
i) and the Chirplet rate, defined as follows:
where
represents the rate of change of signal sample points, signal frequency, and chirplet rate, and
is a Gaussian window with a standard deviation of
. In the CT, the chirplet rate parameter controls frequency variation. A higher chirplet rate improves time resolution, enabling CT to capture rapid signal changes. Additionally,
in CT adjusts the time spread of the chirplet, where a smaller
enhances time resolution but may reduce frequency resolution. Next, we design an optimal
using the chirplet rate to balance these resolutions.
CT transformation is linear and singular and can analyze signals through
and rotation angle
. The rotation angle at each moment is determined by a single
,
where
and
are the sampling time and sampling frequency of the signal, respectively [
12].
Use different
values for signals at different time periods. Therefore, the instantaneous linear frequency modulation rate coefficient at the i-th sample point is defined as [
13]:
when
reaches its maximum value, the estimated instantaneous rotation angle of the i-th sample point is:
Subsequently, calculate the angle value of the instantaneous rotation angle of the i-th sample point based on , which is . The rate of change of the instantaneous frequency of the signal over time. Calculate the CT transform of the signal based on the above content, and then calculate the corresponding and of the signal at different times according to the different instantaneous linear frequency modulation rates. Next, design Gaussian windows corresponding to different time periods based on and .
For the different instantaneous linear frequency modulation rates of signals in different time periods, the local stationary length at the corresponding time is calculated and defined as follows [
14]:
where
is adjusted by the threshold
and can be obtained by the limit of the frequency modulation rate of the signal. In (8), the length of the Gaussian window is adaptively adjusted based on the instantaneous frequency change rate of the signal. When the instantaneous frequency change rate in the signal is large, a larger time resolution is required, so the window length should be shortened to better track the rapid changes of the signal and suppress the noise components that spread over time. Conversely, when the instantaneous frequency change rate in the signal is small, the length of the window can be appropriately increased to increase the frequency resolution. This helps to distinguish between signals and noise in the frequency domain, increasing the algorithm’s ability to respond quickly to channel changes. By dynamically adjusting the window length, high time resolution or frequency resolution can be maintained at different time periods. This adjustment ensures that the local characteristics of the signal can be effectively adapted when analyzing non-stationary signals. According to the content of reference [
15], the standard deviation parameter and width parameter of a Gaussian window can be mutually determined, so the standard deviation of a Gaussian window is:
In summary, the expression of time-varying Gaussian window [
16] in the time domain is:
where,
is the direction with the highest signal-to-noise ratio within the window,
is the rotation matrix that rotates the Gaussian window to the direction with the highest signal-to-noise ratio, and the anisotropy factor
is used to control the degree of expansion of the Gaussian window in different directions. Its value can be adaptively adjusted based on the boundary values of the time-frequency characteristics of the signal within the window [
17]. The schematic diagram of the formation of a time-varying Gaussian window with known rotation angles
and M is shown below.
In
Figure 2a, the shape of a regular Gaussian window in the time-frequency plane is influenced by both the window length
M and the standard deviation
σ. According to the calculation result of Formula (9), the extension of the Gaussian window in the frequency domain can be determined. Therefore, ordinary Gaussian windows exhibit an elliptical shape in the time-frequency plane. In
Figure 2b,
is used to rotate the Gaussian window by
θ angle, and the calculation formula is as follows:
where
is the original coordinate of the Gaussian window, and
is the coordinate of the Gaussian window after being rotated by a rotation matrix by
θ angle. This step changes the direction of the Gaussian window to point towards the direction with the highest signal-to-noise ratio. In
Figure 2c, the time resolution and frequency resolution of the rotated Gaussian window are controlled by stretching and compressing it using
. The Gaussian window is stretched to
in the time domain and compressed to
in the frequency domain, thereby improving frequency resolution. Compared to the case of using a regular Gaussian window in
Figure 2a, the rotated and scaled Gaussian window has a significant suppression effect on the noise inside the window, thereby improving the signal-to-noise ratio of the signal inside the window. In
Figure 2d, the time-varying Gaussian window is rotated back to its original coordinate system using
, and the calculation formula is as follows:
where
and
are in the same coordinate system, in order to distinguish the values of the Gaussian window before rotation and after inverse rotation. Reverse rotation ensures that the Gaussian window and signal are analyzed in the same coordinate system, maintaining the unity of time-frequency analysis and facilitating subsequent signal processing and applications. When λ = 1, the anisotropic Gaussian window degenerates into an isotropic Gaussian window.
In time-varying Gaussian windows, the main function is to improve temporal resolution by adjusting the length of the Gaussian window; by adjusting the anisotropy factor, it mainly works to improve frequency resolution. Therefore, these two processes are complementary: (1) when the signal frequency changes rapidly, the window length is shortened to maintain a high time resolution; (2) by adjusting the shape of the Gaussian window, the optimal resolution can be maintained on the frequency axis. In a time-varying Gaussian window, the adjustment of window length M and the adjustment of shape are coordinated with each other. By dynamically adjusting the window length to optimize time resolution and adjusting the window shape to enhance frequency resolution, optimal results can be achieved in complex non-stationary signal analysis. The adaptive Gaussian window in this framework is specifically designed to enhance noise suppression in real-world, non-stationary environments by dynamically adjusting its shape and orientation. This adaptability allows the algorithm to better isolate desired signals from background noise, significantly improving the signal-to-noise ratio within the analysis window.
According to the Gaussian window w with adaptive adjustment of window length designed above, the solution caused by minimizing the cost function of the signal in the window according to (4) is:
where
is the autocorrelation matrix of
,
is the cross-correlation vector of
, and their definitions are:
where
is the range of the time-varying Gaussian window at this moment. For each moment
i, in order to calculate the channel estimate, it is necessary to compute the inverse of the autocorrelation matrix
. This is the most complex step of the RLS algorithm and also the reason for its high computational complexity. A new method for calculating autocorrelation matrix was proposed in reference [
18],
where
represents the m-th column and n-th row of matrix s. Therefore, only the information in the first column of matrix
needs to be calculated to update matrix
. The formula for calculating
is:
where
the data length is consistent with the length M of the Gaussian window.
can be considered as the convolution of
vector and
vector. Therefore, to improve the computational speed of the algorithm, the time-domain convolution operation is converted into a frequency-domain multiplication operation.
where,
Since the matrix is an Hermitian matrix, the elements in the first row of are equal to the elements in the first column of . Thus, the update of the matrix is completed.
After calculating the
matrix, the main complexity of the algorithm lies in the inverse of the
matrix. In order to reduce the complexity of the algorithm and improve its stability, matrix inversion should be avoided. Therefore, in order to accurately estimate the channel estimation
, the following equation is solved:
Iteratively solve the above equation to obtain an approximate value of the channel impulse response. In order to further reduce the complexity of the algorithm, this paper uses Dichotomous Coordinated Descent (DCD) to iteratively solve the above equation. In each iteration, the DCD algorithm updates the component in vector that corresponds to the element with the highest amplitude in . The algorithm updates from four directions [−1, 1, −j, j] and selects the direction that minimizes the cost function to complete a successful iteration. If the updates in all four directions cannot reduce the cost function, then the step size H is halved and the above process is repeated until the step size is reduced to the minimum value or the maximum number of iterations is reached. The maximum number of times the step size is reduced, , corresponds to the number of bits required for the solution vector. Due to the fact that the DCD algorithm does not require multiplication or division operations, its complexity depends on the number of successful iterations . Therefore, when dealing with different time-varying systems, an appropriate should be selected.
For each iteration, the complexity of the VGSRLS algorithm can be approximated as , where N is the data length and represents the average window length.
Given that the VGSRLS algorithm incorporates a dynamic window-length adjustment mechanism, we use the average window length
in the complexity analysis to better reflect the overall complexity of the algorithm. According to [
12], The MACs of CT are
, where
is the number of chirplets, and
represents the average window length. The VGSRLS algorithm also employs the Leading DCD iterative algorithm for solving the problem. According to [
9], the MACs for the Leading DCD algorithm are
. Therefore, the total MACs for the VGSRLS algorithm are
.
The pseudocode of the VGSRLS algorithm is shown in Algorithm 1, and the pseudocode of the time-varying Gaussian window is shown in Algorithm 2.
| Algorithm 1. VGSRLS Algorithm. |
| Step | Input: x(i), y(i), N, , and H |
| Output: |
| Initialization: |
| 1 | CT: |
| 2 | for i = 1,2, …., N |
| 3 | Calculate the Gaussian window at the current time |
| 4 | |
| 5 |
|
| 6 | Using DCD to solve Equation (23) |
| 7 | |
| Algorithm 2. Calculation of time-varying Gaussian window. |
| Step | Input: |
| Output: M and |
| Initialization: |
| 1 | |
| 2 | |
| 3 | |
| 4 | |
| 5 | Calculate using Equation (10) |
When the channel is a constant channel, the transmission characteristics of the signal remain constant over time and will not change due to differences in time. This characteristic means that the impulse response or frequency response of the channel is the same at any point in time. In this case, the instantaneous frequency change rate of the signal depends on the characteristics of the signal itself, and its value is constant. At this point, Equation (8) becomes:
The window length of the Gaussian window is no longer adjusted according to the frequency change rate and becomes a fixed value. The adaptive adjustment of the Gaussian window shape is mainly based on the spectral characteristics of the signal and the directionality of the signal-to-noise ratio. In a time-invariant channel, the spectral characteristics of the signal are stable and the directionality is fixed, while the Gaussian window degenerates into a shape and direction fixed on the time-frequency plane. The expression of the Gaussian window function after degradation is:





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}