
Ghost Discrimination Method for Broadband Direct Position Determination Based on Frequency Coloring Technology


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Problem Formulation
2.1. Signal Model
2.2. Direct Position Determination Using MVDR
3. Localization and Ghost Distinction
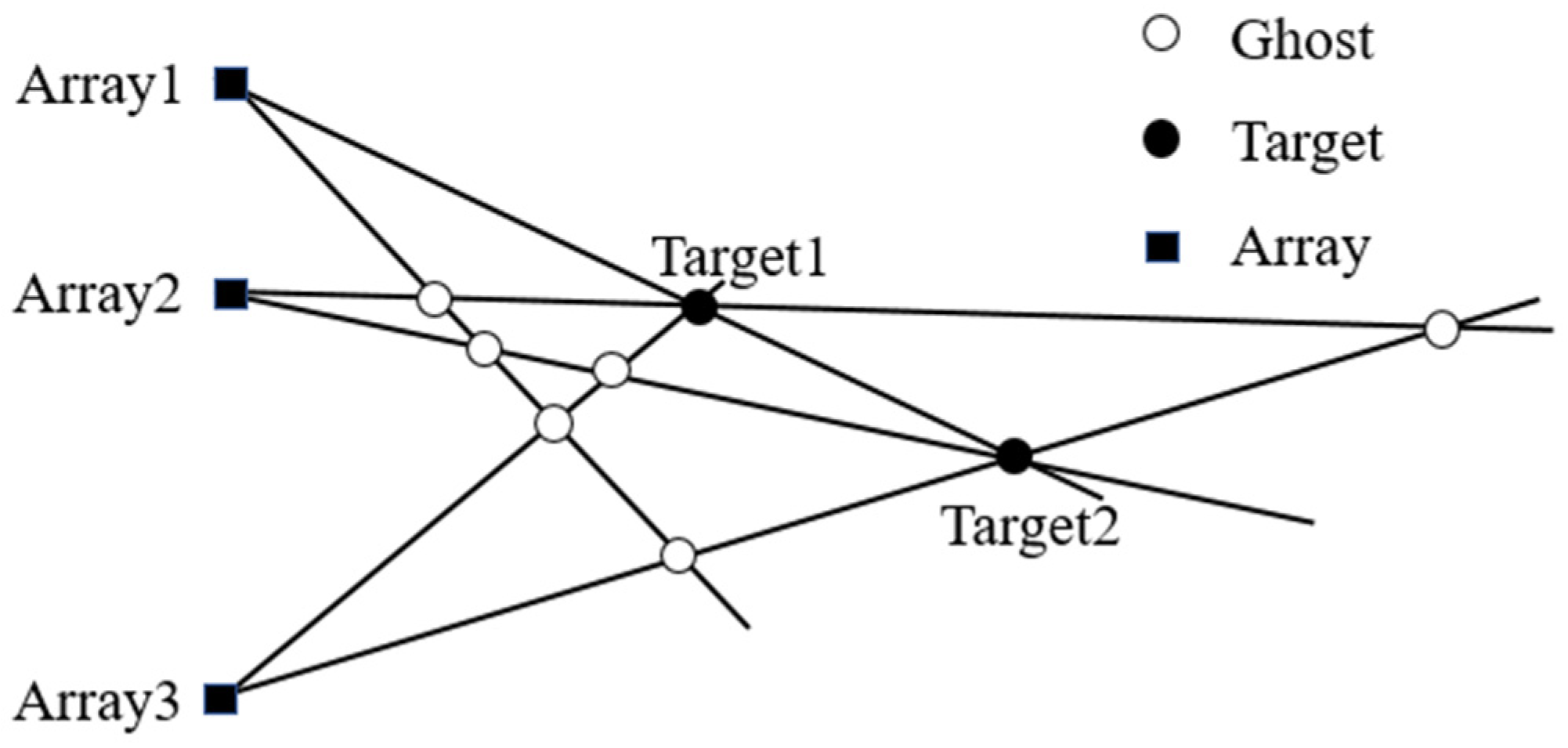
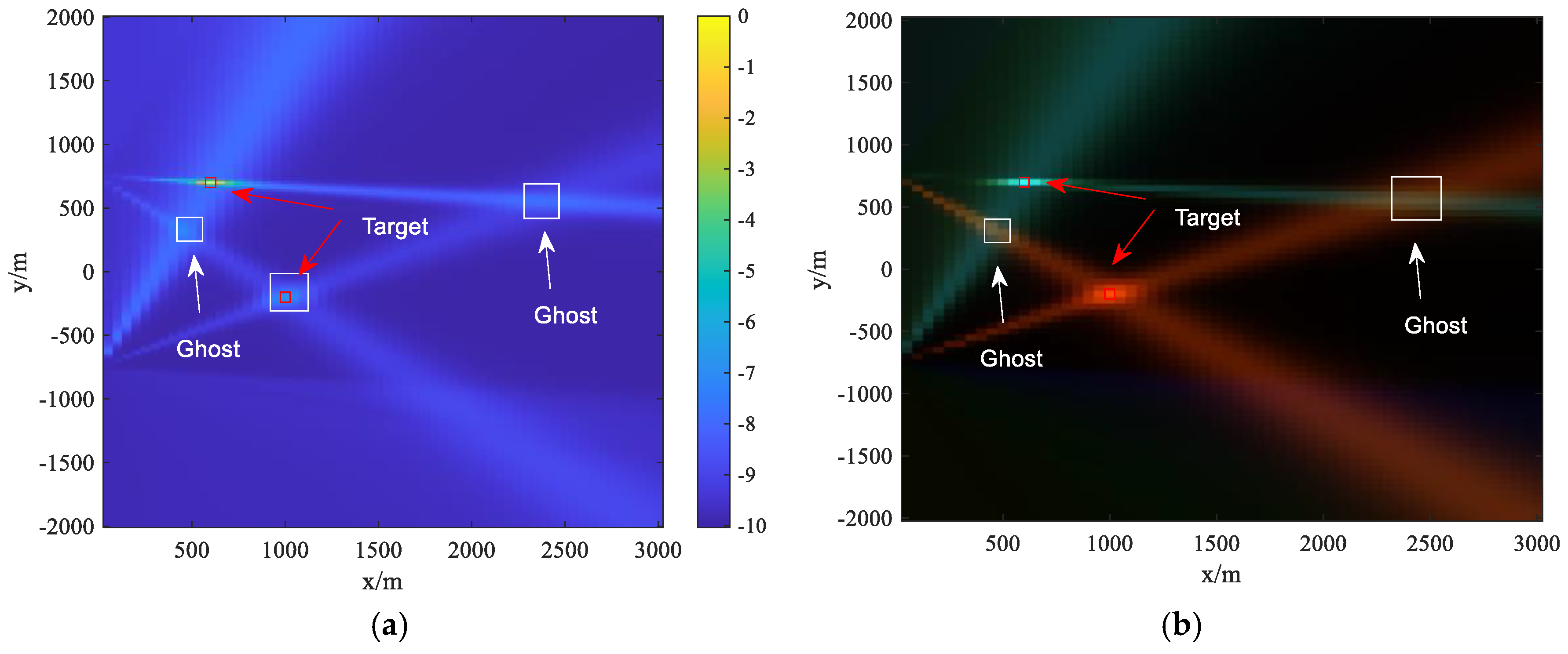
3.1. Generation of Ghosts
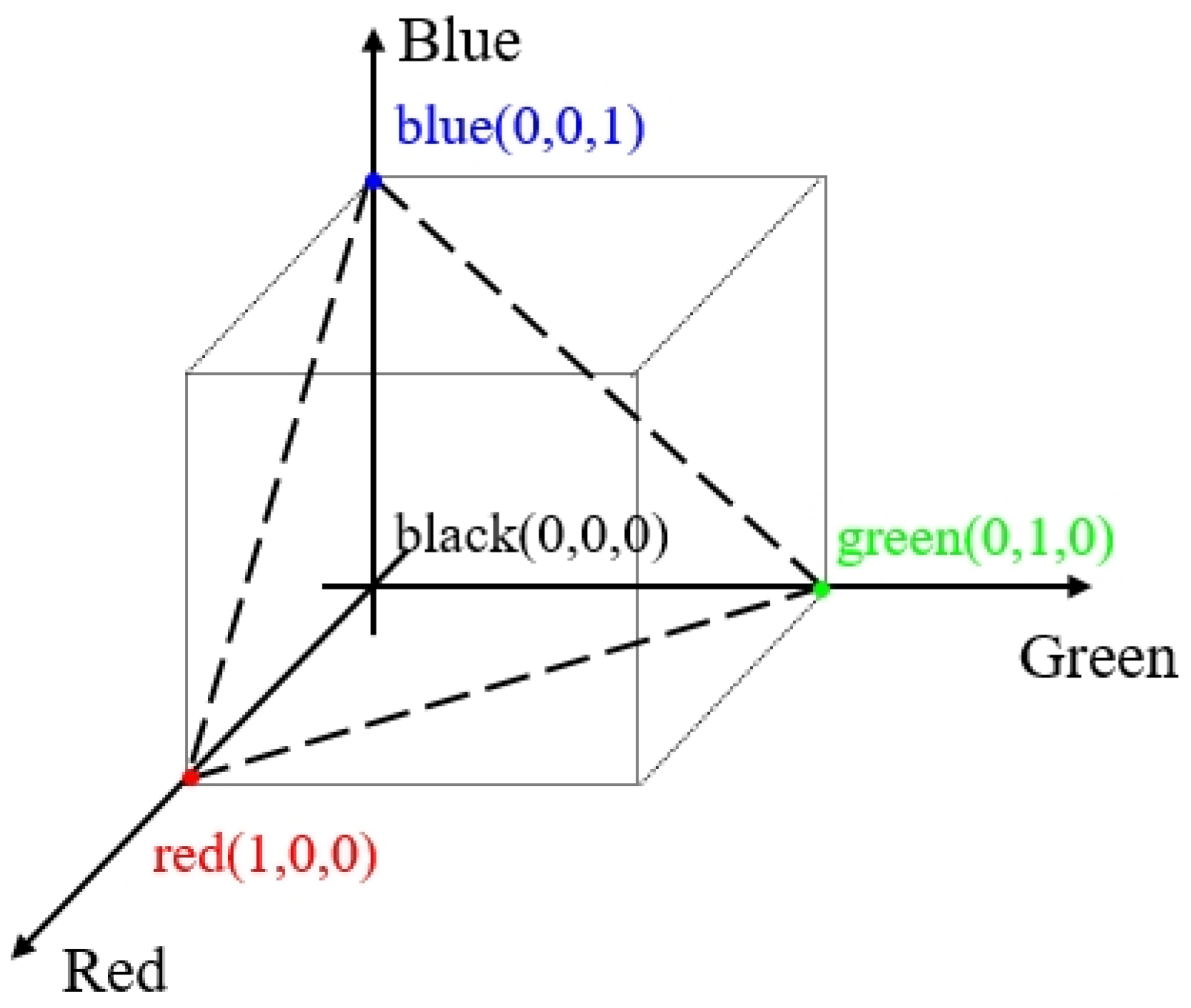
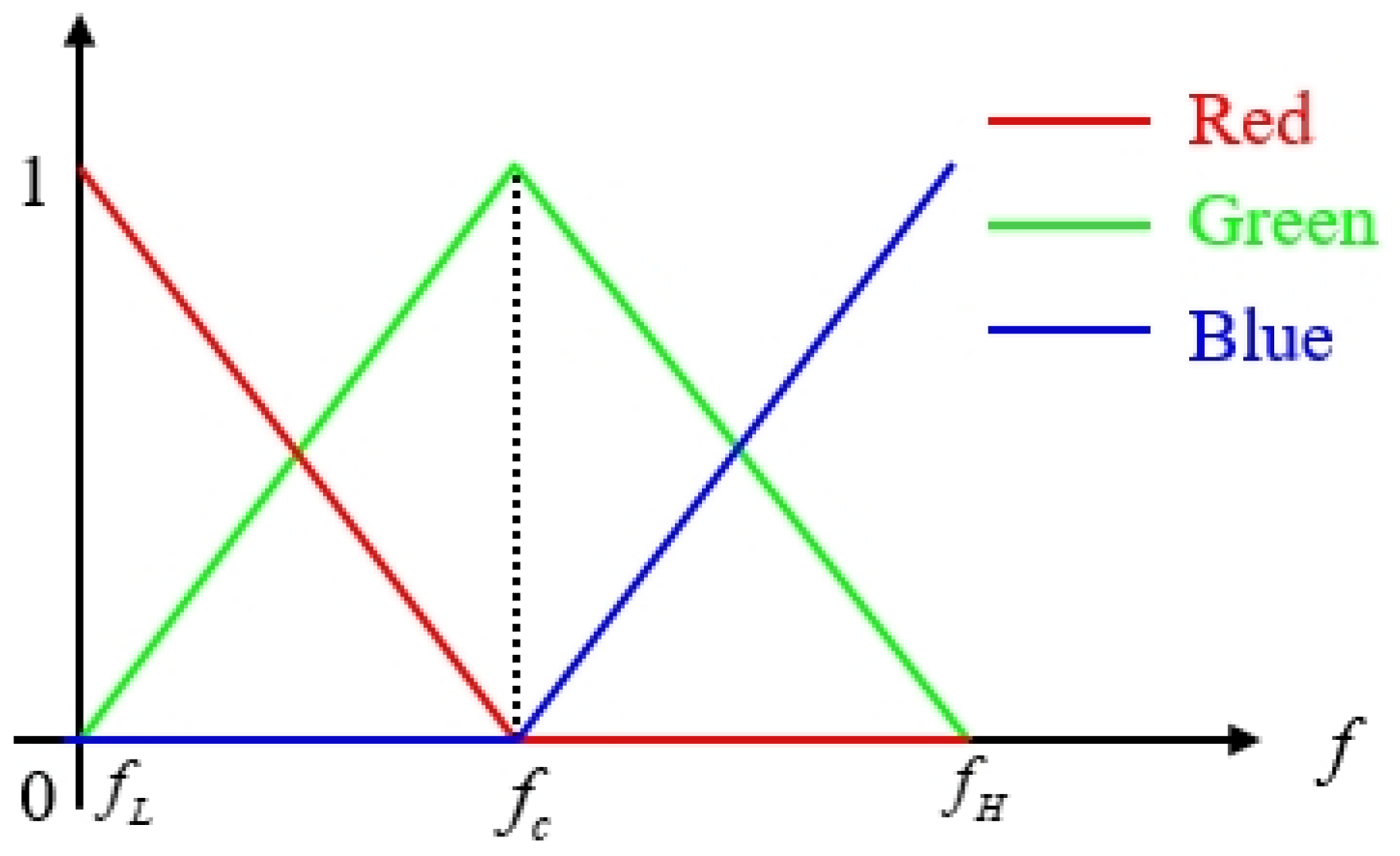
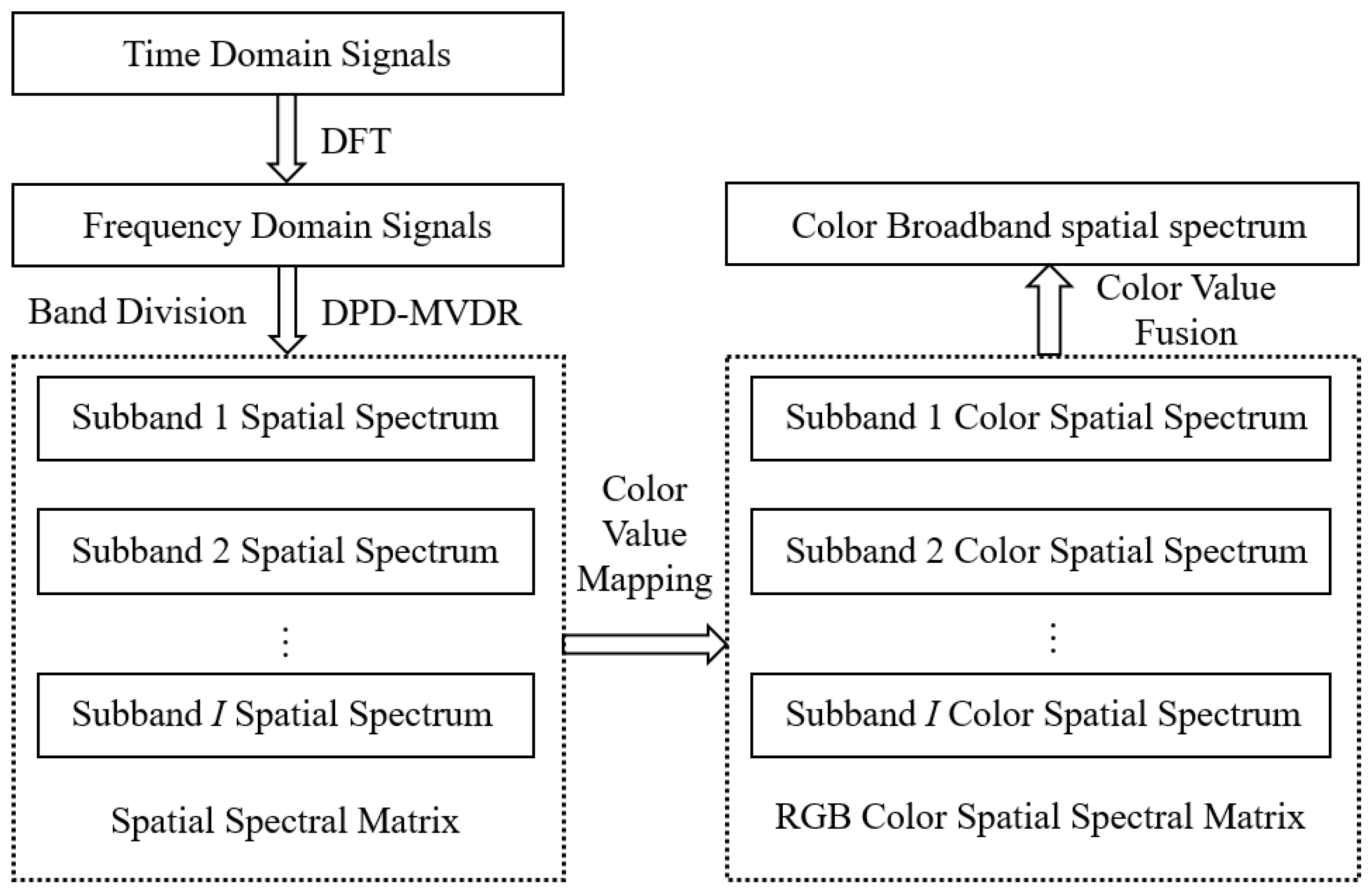
3.2. Distinguishing Ghosts Based on Frequency Coloring
| Algorithm 1: Ghost discrimination method for broadband DPD based on frequency coloring |
| 1: Input: The number of arrays, ; the speed of sound in water, ; array positions, ; received signals, ; number of elements, ; and . 2: Initialize: the number of sub-bands, ; the number of data segments, ; the target bandwidth, . 3: for do: 4: for do: 5: Compute by Equation (4). 6: Compute by Equation (5). 7: Compute by Equation (11). 8: end 9: Obtain by Equation (15). 10: Compute by Equation (16). 11: end 12: Compute by Equation (17). 13: Output: . |
4. Simulation and Experiment
4.1. Numerical Examples
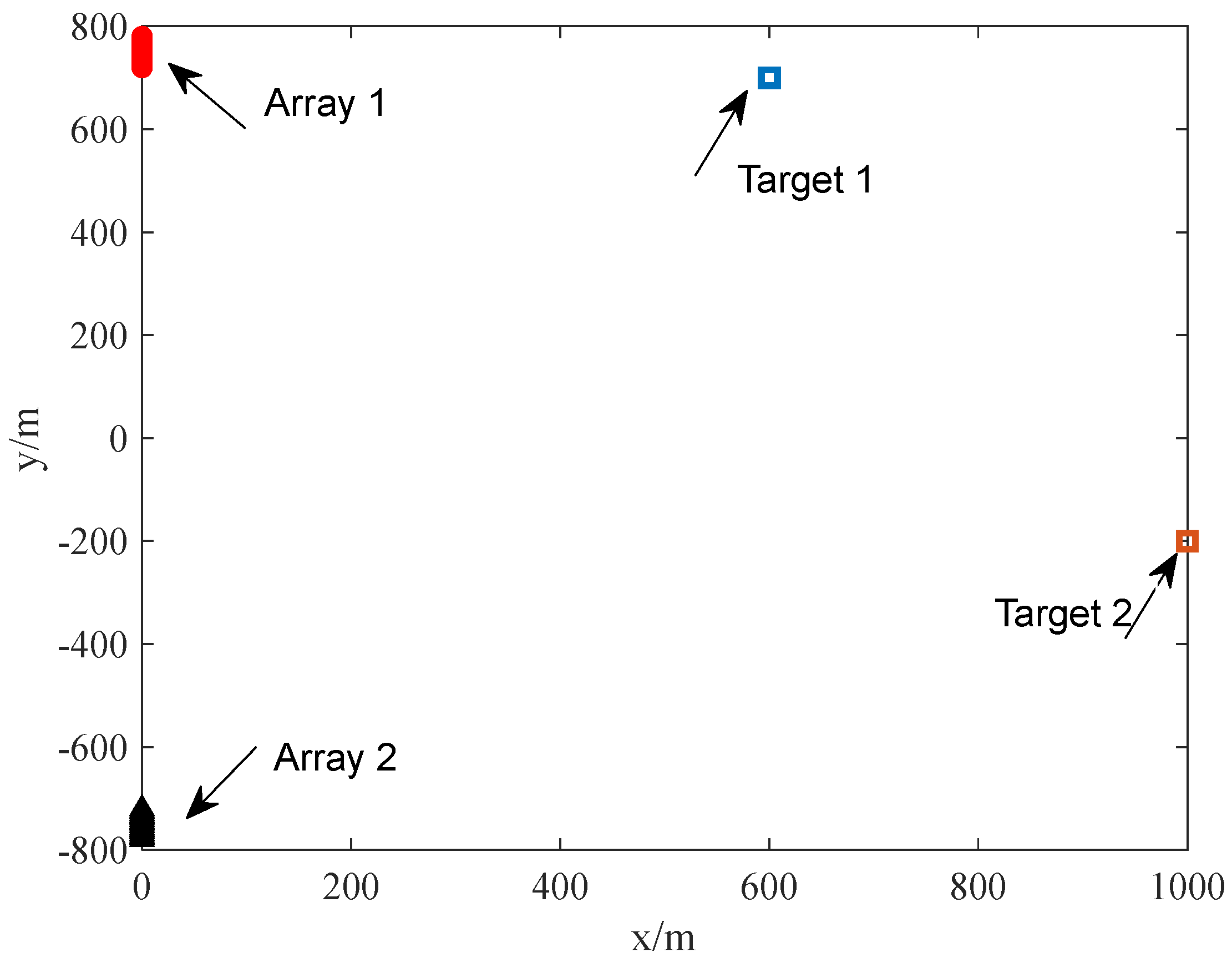
- Dual-Target Localization with Equal Intensity
- B.
- Dual-Target Localization with Unequal Intensity
- C.
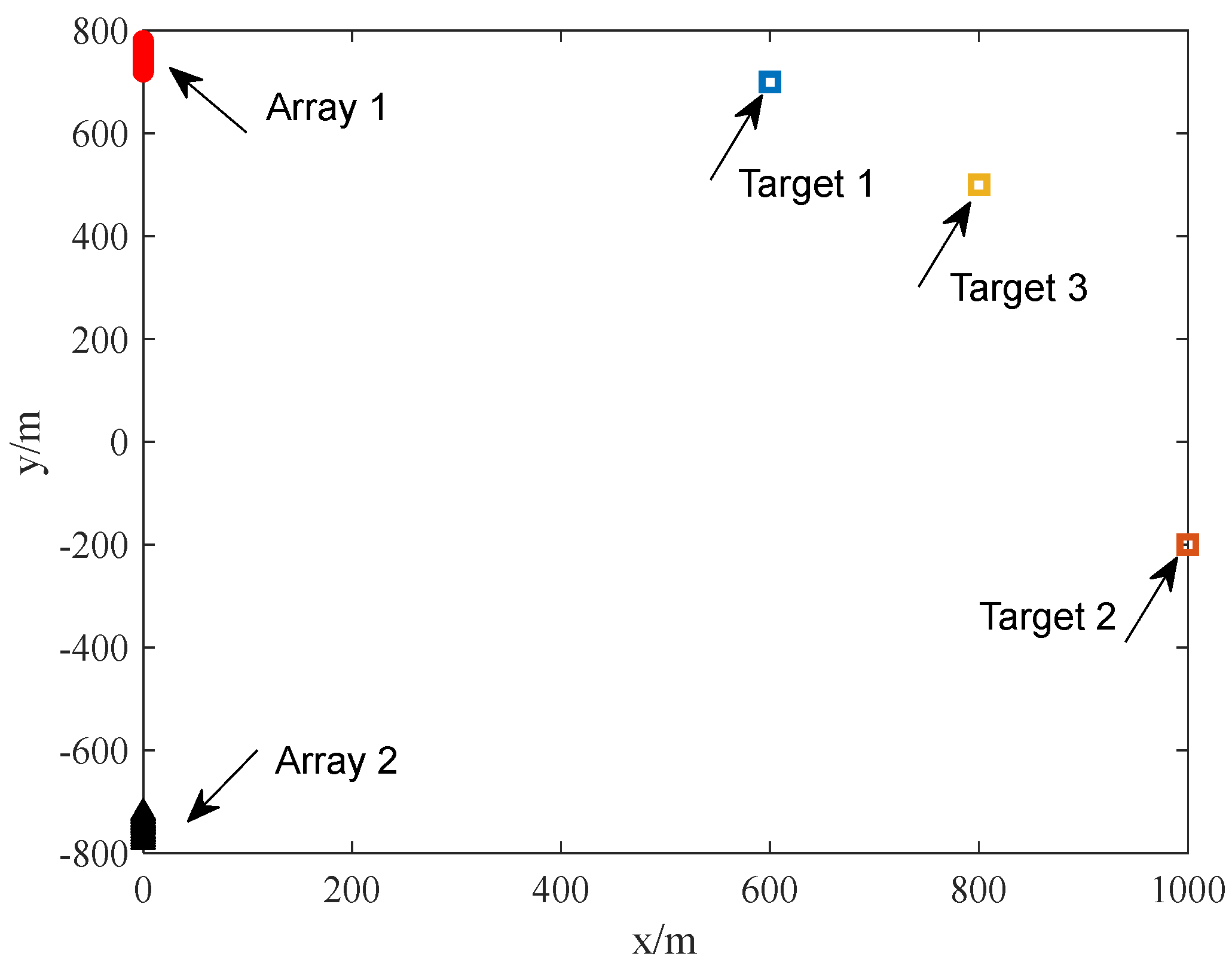
- Multi-Target Localization
- D.
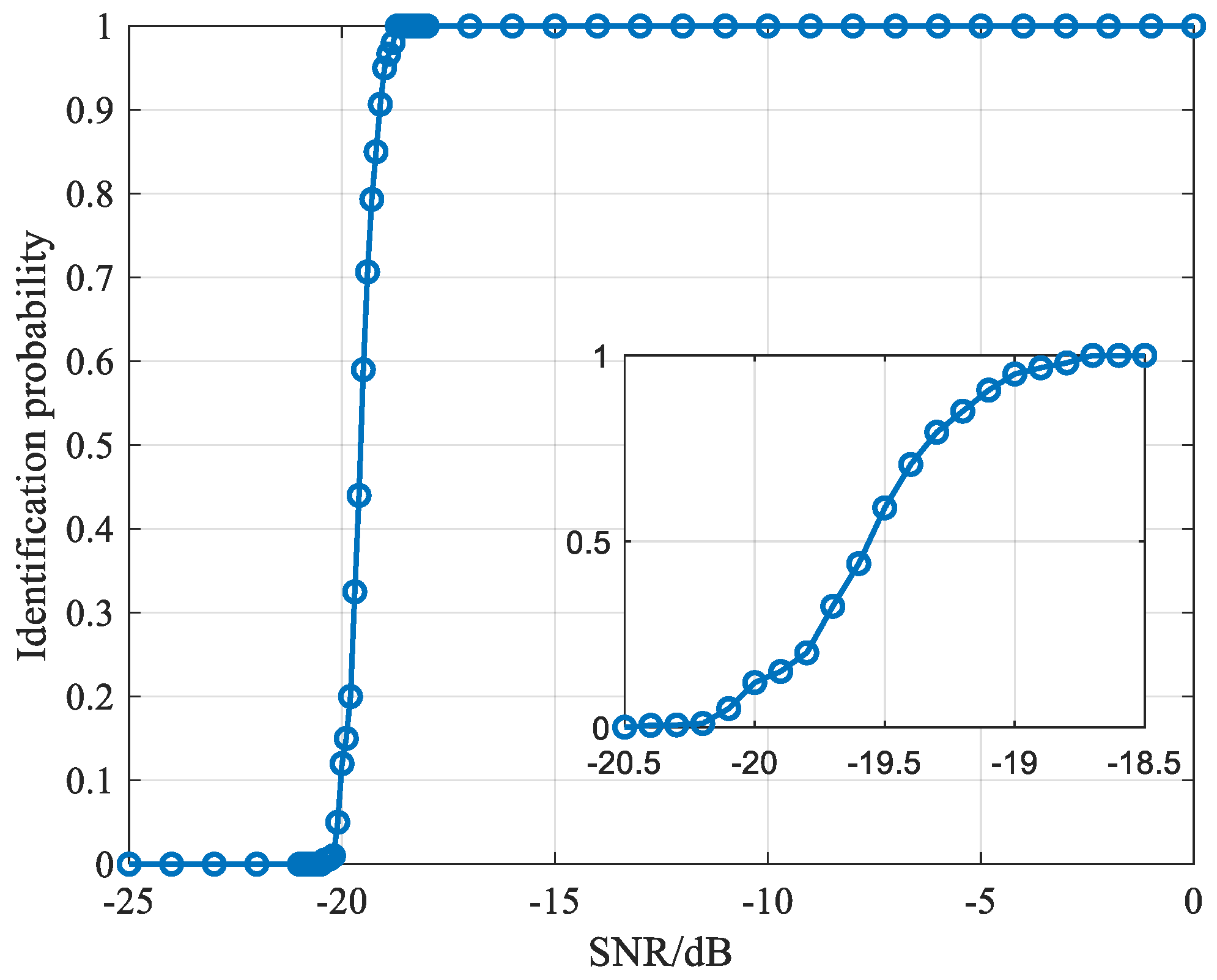
- Ghost-Distinguishing Ability
4.2. Application to the SWellEx-96 Data
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Tzafri, L.; Weiss, A.J. High resolution direct position determination using MVDR. IEEE Trans. Wirel. Commun. 2016, 15, 6449–6461. [Google Scholar] [CrossRef]
- Doanay, K. Bearings-only target localization using total least squares. Signal Process. 2005, 85, 1695–1710. [Google Scholar]
- Wang, Z.; Luo, J.A.; Zhang, X.P. A Novel Location-Penalized Maximum Likelihood Estimator for Bearing-Only Target Localization. IEEE Trans. Signal Process. 2012, 60, 6166–6181. [Google Scholar] [CrossRef]
- Stansfield, R.G. Statistical Theory of DF Fixing. J. IEE 1947, 94, 762–770. [Google Scholar]
- Gavish, M.; Weiss, A.J. Perfromance analysis of bearing-only target location algorithms. IEEE Trans. Aerosp. Electron. Syst. 1992, 28, 817–828. [Google Scholar] [CrossRef]
- Pattipati, K.R.; Deb, S.; Bar-Shalom, Y.; Washburn, R. A new relaxation algorithm and passive sensor data association. IEEE Trans. Autom. Control 1992, 37, 198–213. [Google Scholar] [CrossRef]
- Bishop, A.N.; Pathirana, P.N. Localization of emitters via the intersection of bearing lines: A ghost elimination approach. IEEE Trans. Veh. Technol. 2007, 56, 3106–3110. [Google Scholar] [CrossRef]
- Gholami, M.R.; Gezici, S.; Strom, E.G. A Concave-Convex Procedure for TDOA Based Positioning. IEEE Commun. Lett. 2013, 17, 765–768. [Google Scholar] [CrossRef]
- Smith, J.; Abel, J. Closed-form least-squares source location estimation from range-difference measurements. IEEE Trans. Acoust. Speech Signal Process. 1987, 35, 1661–1669. [Google Scholar] [CrossRef]
- Chan, Y.T.; Ho, K.C. A simple and efficient estimator for hyperbolic location. IEEE Trans. Signal Process. 1994, 42, 1905–1915. [Google Scholar] [CrossRef]
- Wang, Y.; Wu, Y. An Efficient Semidefinite Relaxation Algorithm for Moving Source Localization Using TDOA and FDOA Measurements. IEEE Commun. Lett. 2017, 21, 80–83. [Google Scholar] [CrossRef]
- Wang, G.; Li, Y.; Ansari, N. A Semidefinite Relaxation Method for Source Localization Using TDOA and FDOA Measurements. IEEE Trans. Veh. Technol. 2013, 62, 853–862. [Google Scholar] [CrossRef]
- So, H.C. Source Localization: Algorithms and Analysis. In Handbook of Position Location: Theory, Practice, and Advances, 2nd ed.; Zekavat, R., Buehrer, R.M., Eds.; Wiley-IEEE Press: Hoboken, NJ, USA, 2011; pp. 25–66. [Google Scholar]
- Weiss, A.J. Direct position determination of narrowband radio frequency transmitters. IEEE Signal Process. Lett. 2004, 11, 513–516. [Google Scholar] [CrossRef]
- Wax, M.; Kailath, T. Decentralized processing in sensor arrays. IEEE Trans. Acoust. Speech Signal Process. 1985, 33, 1123–1128. [Google Scholar] [CrossRef]
- Weiss, A.J. Direct position determination of narrowband radio transmitters. In Proceedings of the 2004 IEEE International Conference on Acoustics, Speech, and Signal Processing, Montreal, QC, Canada, 17–21 May 2004. [Google Scholar]
- Amar, A.; Weiss, A.J. Analysis of the direct position determination approach in the presence of model errors. In Proceedings of the 2004 23rd IEEE Convention of Electrical and Electronics Engineers in Israel, Tel-Aviv, Israel, 6–7 September 2004. [Google Scholar]
- Amar, A.; Weiss, A.J. Direct position determination of multiple radio signals. In Proceedings of the 2004 IEEE International Conference on Acoustics, Speech, and Signal Processing, Montreal, QC, Canada, 17–21 May 2004. [Google Scholar]
- Oispuu, M.; Nickel, U. 3D passive source localization by a multi-array network: Noncoherent vs. coherent processing. In Proceedings of the International ITG Workshop on Smart Antennas, Bremen, Germany, 23–24 February 2010. [Google Scholar]
- Picard, J.S.; Weiss, A.J. Direction finding of multiple emitters by spatial sparsity and linear programming. In Proceedings of the 2009 9th International Symposium on Communications and Information Technology, Icheon, Republic of Korea, 28–30 September 2009. [Google Scholar]
- Picard, J.S.; Weiss, A.J. Localization of Multiple Emitters by Spatial Sparsity Methods in the Presence of Fading Channels. In Proceedings of the 2010 7th Workshop on Positioning, Navigation and Communication, Dresden, Germany, 11–12 March 2010. [Google Scholar]
- Jean, O.; Weiss, A.J. Passive Localization and Synchronization Using Arbitrary Signals. IEEE Trans. Signal Process. 2014, 62, 2143–2147. [Google Scholar] [CrossRef]
- Wang, G.; Gao, C.; Razul, S.G.; See, C.M.S. A new direct position determination algorithm using multiple arrays. In Proceedings of the 2018 IEEE 23rd International Conference on Digital Signal Processing (DSP), Shanghai, China, 19–21 November 2018. [Google Scholar]
- Naus, H.W.L.; van Wijk, C.V. Simultaneous localization of multiple emitters. IEE Proc. Radar Sonar Nav. 2004, 151, 65–70. [Google Scholar] [CrossRef]
- Reed, J.D.; da Silva, C.R.C.M.; Buehrer, R.M. Multiple-source localization using line-of-bearing measurements: Approaches to the data association problem. In Proceedings of the MILCOM 2008-2008 IEEE Military Communications Conference, San Diego, CA, USA, 16–19 November 2008. [Google Scholar]
- Kanzawa, Y.; Miyamoto, S. Generalized fuzzy c-means clustering and its property of fuzzy classification function. J. Adv. Comput. Intell. Intell. Inform. 2021, 25, 73–82. [Google Scholar] [CrossRef]
- Campello, R.J.; Moulavi, D.; Sander, J. Density-based clustering based on hierarchical density estimates. In Advances in Knowledge Discovery and Data Mining, Proceedings of the Pacific-Asia Conference on Knowledge Discovery and Data Mining, Gold Coast, Australia, 14–17 April 2013; Springer: Berlin/Heidelberg, Germany, 2013. [Google Scholar]
- Deng, Z.; Wang, Z.; Zhang, T.; Zhang, C.; Si, W. A novel density-based clustering method for effective removal of spurious intersections in bearings-only localization. EURASIP J. Adv. Signal Process. 2023, 2023, 19. [Google Scholar] [CrossRef]
- Makhoul, J.; Roucos, S.; Gish, H. Vector quantization in speech coding. Proc. IEEE 1985, 73, 1551–1588. [Google Scholar] [CrossRef]
- Schell, S.V.; Calabretta, R.A.; Gardner, W.A.; Agee, B. Cyclic MUSIC algorithms for signal-selective direction estimation. In Proceedings of the International Conference on Acoustics, Speech, and Signal Processing, Glasgow, UK, 23–26 May 1989. [Google Scholar]
- Iqbal, A.; Gans, N.R. Localization of classified objects in SLAM using nonparametric statistics and clustering. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018. [Google Scholar]
- Strecke, M.; Stuckler, J. Em-fusion: Dynamic object-level SLAM with probabilistic data association. In Proceedings of the 2019 IEEE/CVF International Conference on Computer Vision (ICCV), Seoul, Republic of Korea, 27 October 2019. [Google Scholar]
- Wang, L.; Yang, Y.; Liu, X. A distributed subband valley fusion (DSVF) method for low frequency broadband target localization. J. Acoust. Soc. Am. 2018, 143, 2269–2278. [Google Scholar] [CrossRef] [PubMed]
- Brandwood, D.H. A complex gradient operator and its application in adaptive array theory. IEE Proc. Radar Sonar Nav. 1983, 130, 11–16. [Google Scholar]
- Gonzalez, R.C.; Woods, R.E.; Eddins, S.L. Digital Image Processing Using MATLAB, 2nd ed.; Ruan, Q., Ed.; Tsinghua University Press: Beijing, China, 2013; pp. 205–209. [Google Scholar]
- Zhang, D.; Fan, W.; Xu, L.; Zhang, X. A method of detecting and displaying passive sonar broadband target based on color processing. Techn. Acoust. 2021, 40, 556–559. [Google Scholar]
- Wang, C.; Liu, X.; Sun, C. Passive sonar broadband energy detection using frequency coloring. J. Harbin Eng. Univ. 2021, 42, 456–462. [Google Scholar]
- Ashraf, S. Towards Shrewd Object Visualization Mechanism. Trends Comput. Sci. Inf. Technol. 2020, 5, 097–102. [Google Scholar]
- Kim, S.; You, J. Efficient LUT Design Methodologies of Transformation between RGB and HSV for HSV Based Image Enhancements. J. Electron. Eng. Technol. 2024, 19, 4551–4563. [Google Scholar] [CrossRef]
- Flores, V.P.; Gómez, D.; Castro, J.; Montero, J. New Aggregation Approaches with HSV to Color Edge Detection. Int. J. Comput. Int. Syst. 2022, 15, 78. [Google Scholar] [CrossRef]
- SWellEx-96 Experiment Acoustic Data. UC San Diego Library Digital Collections. 2015. Available online: https://library.ucsd.edu/dc/collection/bb3312136z (accessed on 29 October 2024).
- The SWellEx-96 Experiment. Marine Physical Lab. 2003. Available online: https://swellex96.ucsd.edu/s59.htm (accessed on 29 October 2024).






Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yu, M.; Yang, L.; Yang, Y.; Liu, X.; Wang, L. Ghost Discrimination Method for Broadband Direct Position Determination Based on Frequency Coloring Technology. J. Mar. Sci. Eng. 2024, 12, 2182. https://doi.org/10.3390/jmse12122182
Yu M, Yang L, Yang Y, Liu X, Wang L. Ghost Discrimination Method for Broadband Direct Position Determination Based on Frequency Coloring Technology. Journal of Marine Science and Engineering. 2024; 12(12):2182. https://doi.org/10.3390/jmse12122182
Chicago/Turabian StyleYu, Mengling, Long Yang, Yixin Yang, Xionghou Liu, and Lu Wang. 2024. "Ghost Discrimination Method for Broadband Direct Position Determination Based on Frequency Coloring Technology" Journal of Marine Science and Engineering 12, no. 12: 2182. https://doi.org/10.3390/jmse12122182
APA StyleYu, M., Yang, L., Yang, Y., Liu, X., & Wang, L. (2024). Ghost Discrimination Method for Broadband Direct Position Determination Based on Frequency Coloring Technology. Journal of Marine Science and Engineering, 12(12), 2182. https://doi.org/10.3390/jmse12122182