
Experimental and Numerical Analysis of Supporting Forces and Lashing Forces in a Ship Cargo Securing Scheme


Abstract
1. Introduction
2. Experimental Investigations
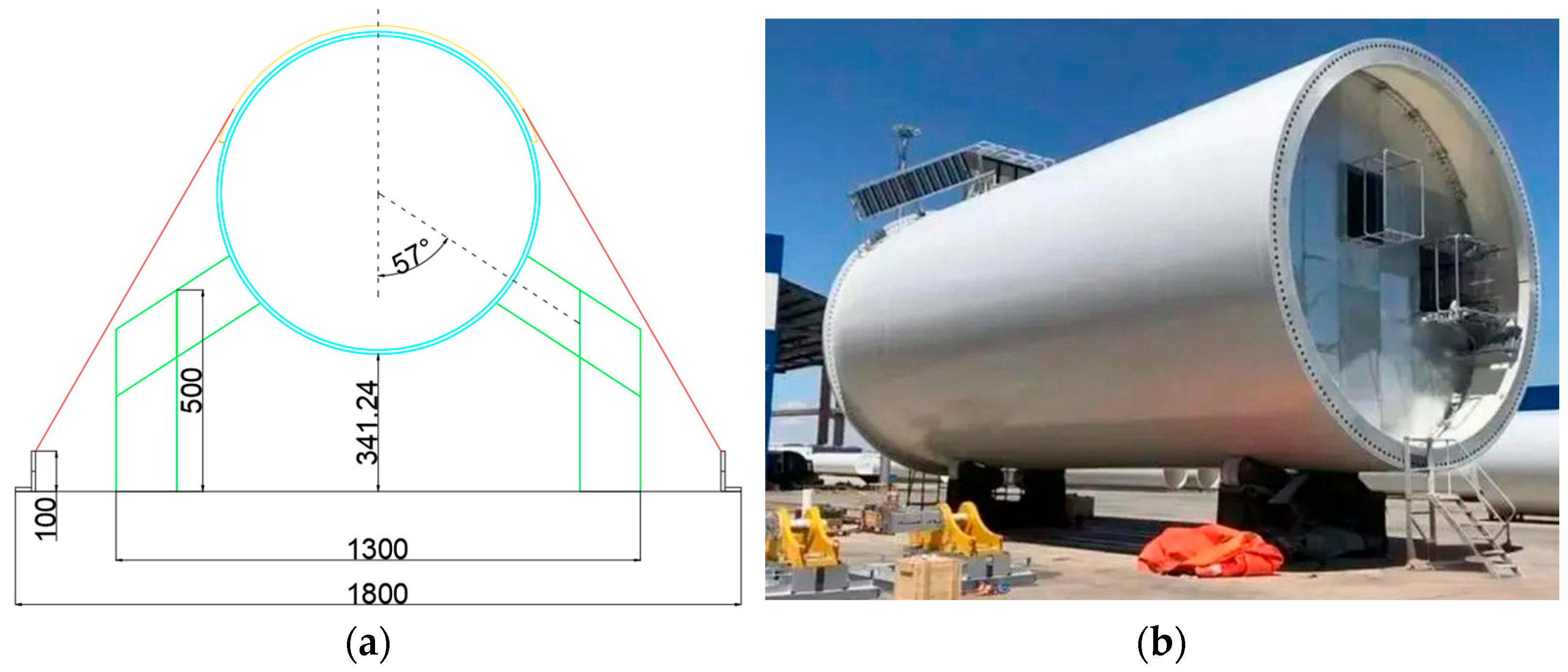
2.1. Test Model and Arrangement
2.2. Selection of Test Conditions
2.3. Test Data Acquisition
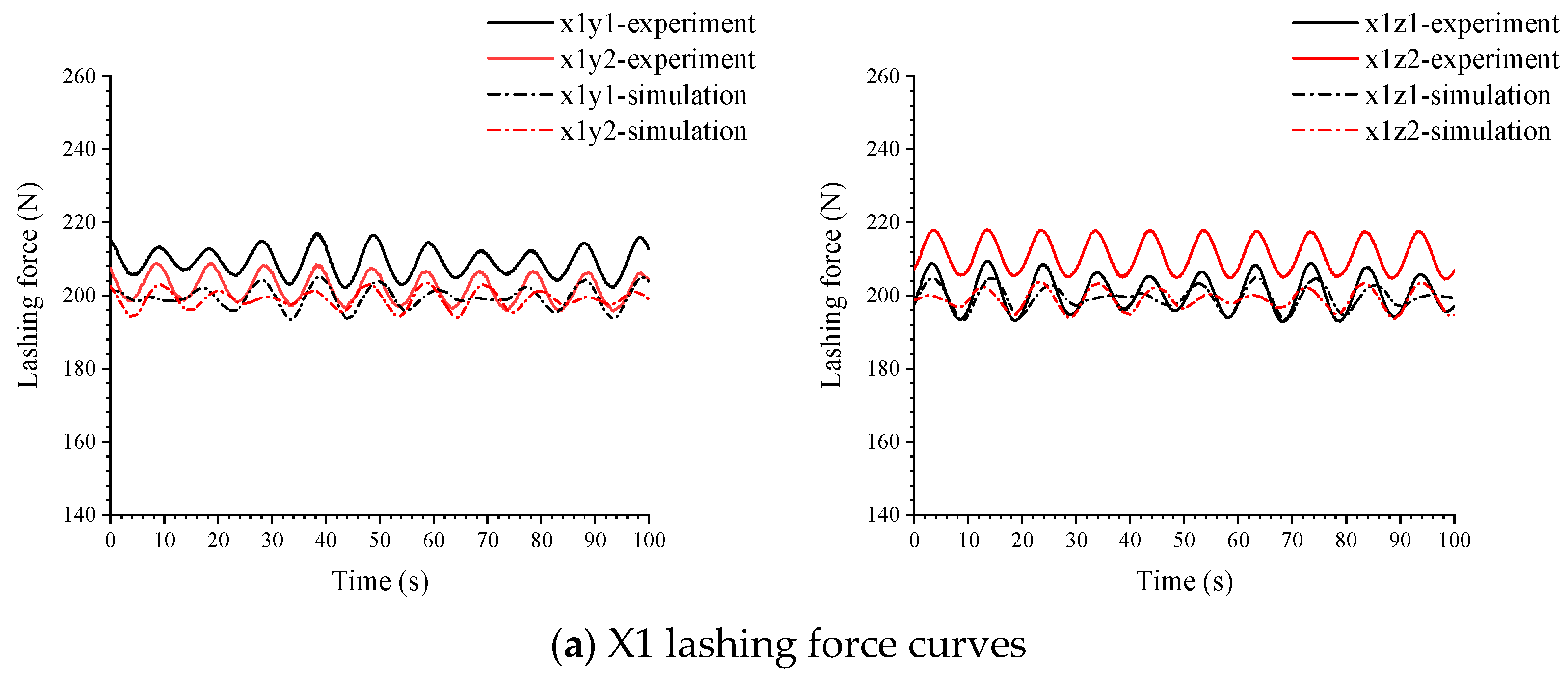
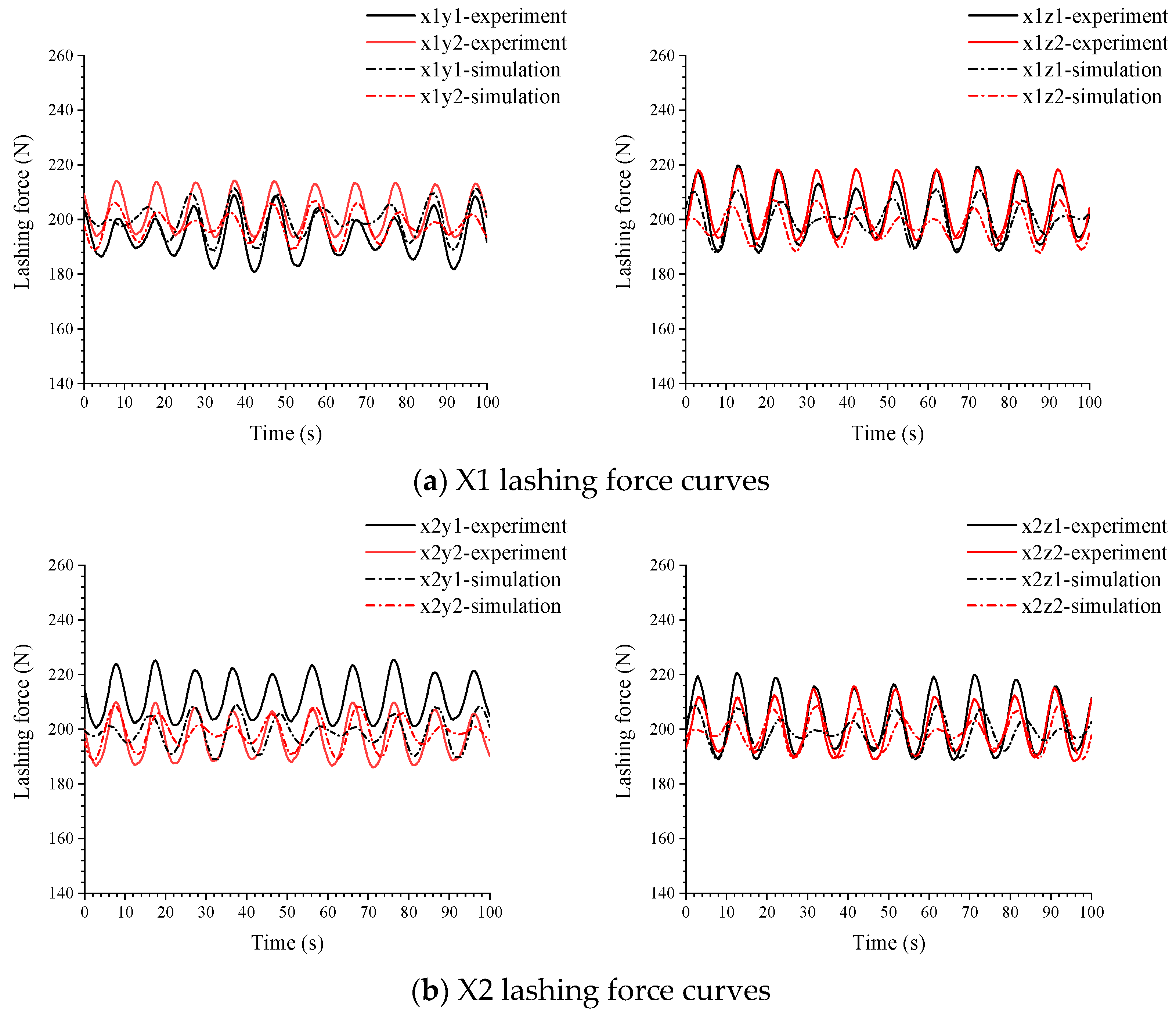
2.4. Partial Test Data
3. Numerical Simulation
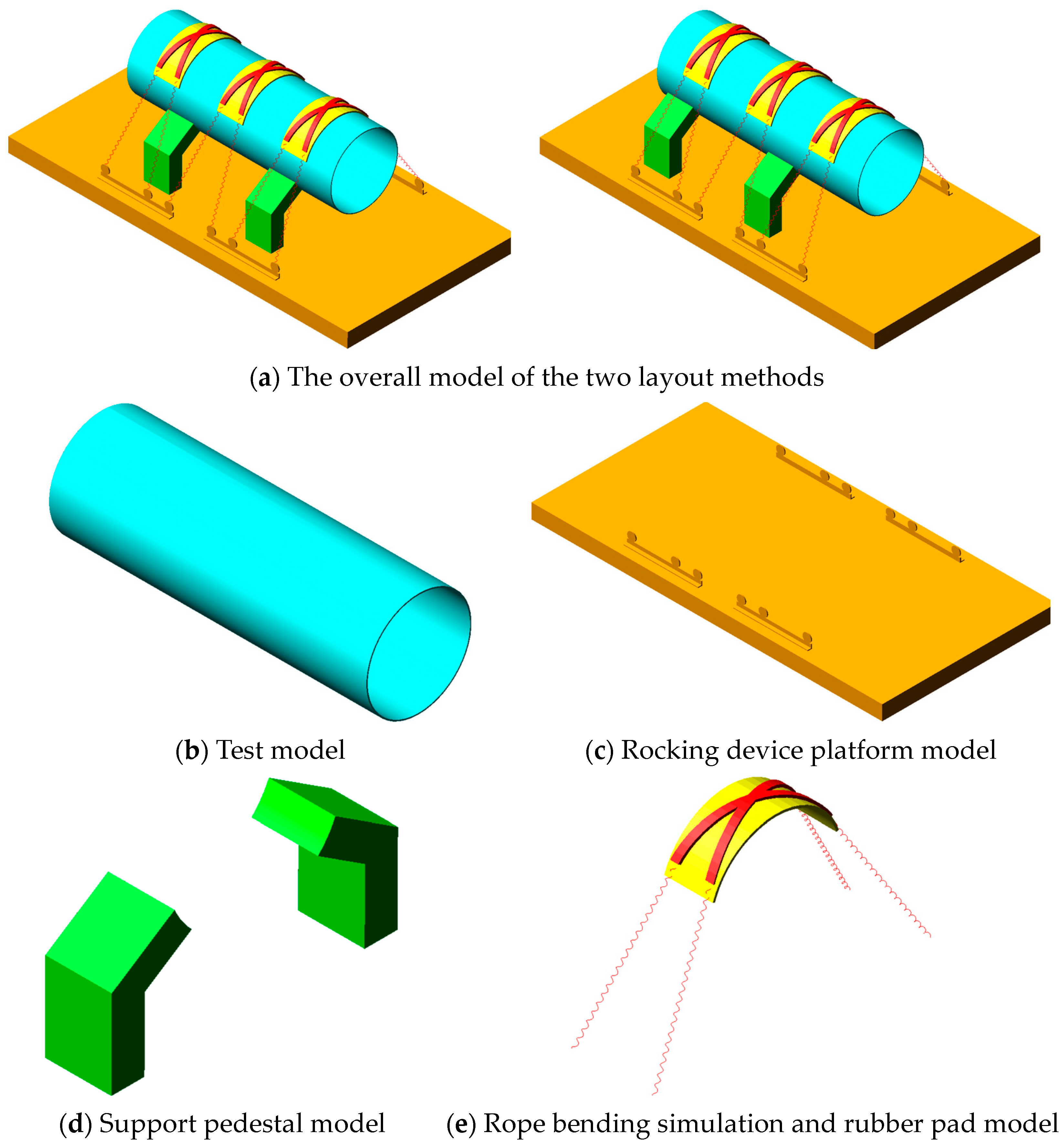
3.1. Numerical Simulation Model
3.2. Simulation Method
3.2.1. Contact Parameters
3.2.2. Lashing Stiffness
3.2.3. Swing Device Platform Motion
3.2.4. Time Step Setting
4. Results and Discussion
4.1. Support Force of Pedestal
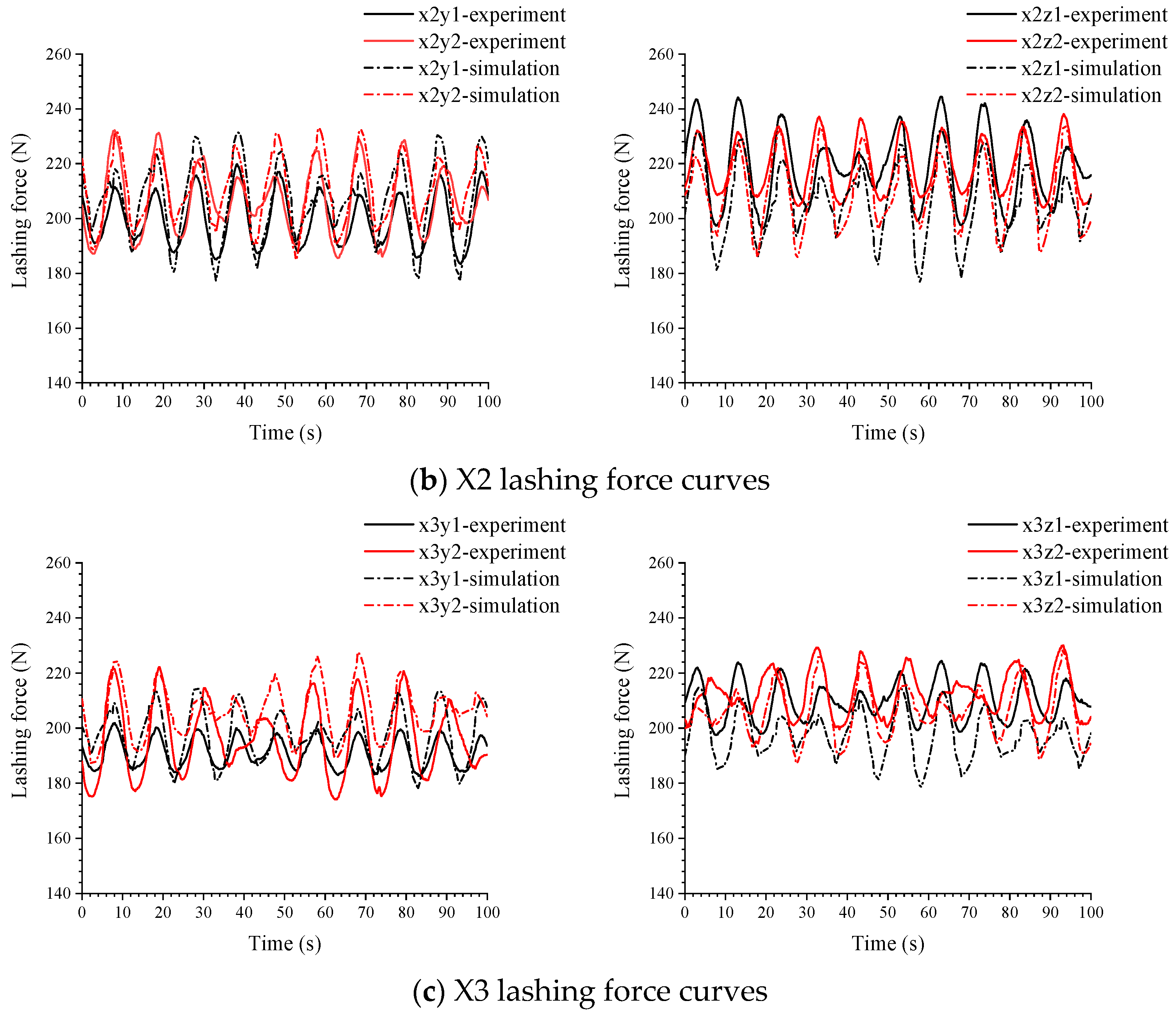
4.2. Lashing Force
4.3. Load Peak and Error Analysis
- Numerical simplifications
- Misalignments and experimental imperfections
- Pre-tensioning forces
5. Conclusions
- When comparing the experimental data with the numerical simulation results for various operating conditions, the periodicity, and trends of the support forces on the pedestal supports and rope loads are consistent, with only minor discrepancies in peak load values. Notably, the support forces exhibit relatively larger discrepancies compared to the rope loads. For most cases, the peak load discrepancies between experiments and simulations are within 10%, except for a few specific conditions where they reach around 15%. The discrepancies in peak rope loads are generally within 9%. This demonstrates that the simulation method can be applied effectively for engineering analysis and prediction purposes.
- With the increase in the amplitude of the designed motion parameters, the response amplitudes of various load components increase in all test conditions. The support forces on the pedestal exhibit more pronounced variations, while the rope loads show relatively smaller variations. This is primarily because the support configuration of the pedestal supports can directly restrict the model’s displacement in directions other than vertical during the motion. Consequently, in the test conditions, the model’s motion does not generate significant relative displacement, resulting in minimal deformation effects on the cables.
- In the offset condition, the pedestal support force of the forward pedestal is significantly greater than that in the centered condition. This is due to the fact that, in the offset condition, the model’s center of gravity is biased toward the forward pedestal, resulting in a larger load being borne by the forward pedestal. In practical structural design of securing systems, it is advisable to avoid situations where the supporting structures are biased towards one end in order to reduce the likelihood of load concentration on a particular support component.
- The discrepancies between numerical simulations and model experiments in the loads on structural components may arise from two main factors. Firstly, the simulation model assumes a rigid body model, neglecting local deformation effects. Secondly, during the experimental implementation, the arrangement of various components may not be as perfect as in numerical simulations. The pre-tension forces applied to the ropes at different locations can influence each other, and it is challenging to simultaneously achieve their predetermined values through manual adjustments.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Choung, J.; Jeong, S.-M. Vehicle Securing Safety Assessments of a Korean Coastal Car Ferry According to Acceleration Prediction Approaches. Brodogradnja 2019, 70, 115–131. [Google Scholar] [CrossRef]
- Acanfora, M.; Montewka, J.; Hinz, T.; Matusiak, J. On the Estimation of the Design Loads on Container Stacks Due to Excessive Acceleration in Adverse Weather Conditions. Mar. Struct. 2017, 53, 105–123. [Google Scholar] [CrossRef]
- Kabaciński, J.; Wiśnicki, B. Accuracy Analysis of Stowing Computations for Securing Non-Standard Cargoes on Ships According to IMO CSS Code. Pol. Marit. Res. 2009, 16, 67–71. [Google Scholar] [CrossRef]
- Pérez-Canosa, J.M.; Orosa, J.A.; de Osés, F.X.M.; Lama-Carballo, F.J. Optimization of Ship’s Navigational Parameters to Improve the Stowage and Securing Criteria of Non-Standardized Cargo in Ships. J. Mar. Sci. Eng. 2023, 11, 1782. [Google Scholar] [CrossRef]
- Sternsson, M.; Björkenstam, U. Statistical Study of Lashing Forces Measured On-Board a PCTC Vessel. Mar. Struct. 2003, 16, 345–354. [Google Scholar] [CrossRef]
- Jia, J.; Ulfvarson, A. Dynamic Analysis of Vehicle—Deck Interactions. Ocean Eng. 2006, 33, 1765–1795. [Google Scholar] [CrossRef]
- Jia, J. Investigations of Vehicle Securing without Lashings for Ro-Ro Ships. J. Mar. Sci. Technol. 2007, 12, 43–57. [Google Scholar] [CrossRef]
- Matusiak, J. Dynamics of Cargo Shift Onboard a Ship in Irregular Beam Waves. Int. Shipbuild. Prog. 2000, 47, 77–93. [Google Scholar]
- Andersson, P.; Jagelčák, J.; Lind, E.; Petersen, S.S. Report from Pulling Tests with Used Lashing Equipment; MariTerm AB: Höganäs, Sweden, 2009. [Google Scholar]
- Turnbull, S.R.; Dawson, D. The Securing of Rigid Semi-Trailers on Roll-on/Roll-off Ships. Int. J. Mech. Sci. 1997, 39, 1–14. [Google Scholar] [CrossRef]
- Surendran, S.; Lee, S.K.; Reddy, J.V.R.; Lee, G. Non-Linear Roll Dynamics of a Ro-Ro Ship in Waves. Ocean Eng. 2005, 32, 1818–1828. [Google Scholar] [CrossRef]
- Kawamura, K.; Hashimoto, H.; Matsuda, A.; Terada, D. SPH Simulation of Ship Behaviour in Severe Water-Shipping Situations. Ocean Eng. 2016, 120, 220–229. [Google Scholar] [CrossRef]
- Liu, J.; Li, C.; Wang, D.; Cai, Z. Investigations on the Dynamics of Container Stack and Securing System under Rolling Motion Using a Scaled Model Test. Ships Offshore Struct. 2022, 17, 92–104. [Google Scholar] [CrossRef]
- Li, C.; Wang, D. Multi-Objective Optimisation of a Container Ship Lashing Bridge Using Knowledge-Based Engineering. Ships Offshore Struct. 2019, 14, 35–52. [Google Scholar] [CrossRef]
- Li, C.; Wang, D.; Liu, J. Numerical Analysis and Experimental Study on the Scaled Model of a Container Ship Lashing Bridge. Ocean Eng. 2020, 201, 107095. [Google Scholar] [CrossRef]
- Li, C.; Wang, D.; Liu, J.; Cai, Z. Experimental and Numerical Investigation on Dynamic Response of a Four-Tier Container Stack and Lashing System Subject to Rolling and Pitching Excitation. Appl. Ocean Res. 2021, 109, 102553. [Google Scholar] [CrossRef]
- Song, F.; He, Y.; Liu, H. Research on Goods and the Ship Interaction Based on ADAMS. MATEC Web Conf. 2017, 95, 11002. [Google Scholar] [CrossRef]
- Kreuzer, E.; Schlegel, V.; Stache, F. Multibody Simulation Tool for the Calculation of Lashing Loads on RoRo Ships. Multibody Syst. Dyn. 2007, 18, 73–80. [Google Scholar] [CrossRef]
- Nam, W.; Park, S.-J.; Kim, K. Numerical Investigation of the Ultimate Strength of D-Ring Devices and Deck Structures. J. Mar. Sci. Eng. 2022, 10, 952. [Google Scholar] [CrossRef]
- Zhu, H.J.; Yao, H. Dynamic Simulation Analysis of a Ship-Borne Loading Device. Adv. Mater. Res. 2012, 487, 562–567. [Google Scholar] [CrossRef]
- E-Chao, L.; Bai-Jun, T.; Yang-Gui, L. Amendments to the Methods of Non-Standardized Cargo Unit Securing Assessing. In Proceedings of the 2020 IEEE 5th International Conference on Intelligent Transportation Engineering (ICITE), Beijing, China, 11–13 September 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 371–375. [Google Scholar] [CrossRef]
- Adams, G.G.; Nosonovsky, M. Contact Modeling—Forces. Tribol. Int. 2000, 33, 431–442. [Google Scholar] [CrossRef]
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| IDX | Condition Number | Description of Working Condition |
|---|---|---|
| 1 | M1 | Middle condition, group 1 parameter |
| 2 | M2 | Middle condition, group 2 parameter |
| 3 | M3 | Middle condition, group 3 parameter |
| 4 | O1 | Offset condition, group 1 parameter |
| 5 | O2 | Offset condition, group 2 parameter |
| 6 | O3 | Offset condition, group 3 parameter |
| Group ID | Roll Amplitude | Roll Period | Pitch Amplitude | Pitch Period | Heave Amplitude | Heave Period |
|---|---|---|---|---|---|---|
| 1 | 10° | 10 s | 5° | 12 s | 100 mm | 8 s |
| 2 | 20° | 10 s | 10° | 12 s | 200 mm | 8 s |
| 3 | 25° | 10 s | 15° | 12 s | 300 mm | 8 s |
| Condition ID | Support Force (N) | Lashing Force (N) | ||||
|---|---|---|---|---|---|---|
| Test | Simulation | Error | Test | Simulation | Error | |
| M1 | 3738 | 3380.3 | 9.57% | 221.7 | 204.7 | 7.67% |
| M2 | 3661.1 | 3601.1 | 1.64% | 225.1 | 211.1 | 6.22% |
| M3 | 3900.2 | 3744.6 | 3.99% | 228.2 | 216.8 | 5.00% |
| O1 | 5765 | 5214.5 | 9.55% | 200.4 | 212.2 | 5.89% |
| O2 | 6331.4 | 5815.2 | 8.15% | 219.4 | 238.8 | 8.84% |
| O3 | 6865.1 | 5881.9 | 14.32% | 244.2 | 250.53 | 2.59% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, M.; Wang, G.; Liu, K.; Lu, Y.; Wang, J. Experimental and Numerical Analysis of Supporting Forces and Lashing Forces in a Ship Cargo Securing Scheme. J. Mar. Sci. Eng. 2024, 12, 158. https://doi.org/10.3390/jmse12010158
Li M, Wang G, Liu K, Lu Y, Wang J. Experimental and Numerical Analysis of Supporting Forces and Lashing Forces in a Ship Cargo Securing Scheme. Journal of Marine Science and Engineering. 2024; 12(1):158. https://doi.org/10.3390/jmse12010158
Chicago/Turabian StyleLi, Mengxiang, Guo Wang, Kun Liu, Yue Lu, and Jiaxia Wang. 2024. "Experimental and Numerical Analysis of Supporting Forces and Lashing Forces in a Ship Cargo Securing Scheme" Journal of Marine Science and Engineering 12, no. 1: 158. https://doi.org/10.3390/jmse12010158
APA StyleLi, M., Wang, G., Liu, K., Lu, Y., & Wang, J. (2024). Experimental and Numerical Analysis of Supporting Forces and Lashing Forces in a Ship Cargo Securing Scheme. Journal of Marine Science and Engineering, 12(1), 158. https://doi.org/10.3390/jmse12010158