
The Mitigation of Mutual Coupling Effects in Multi-Beam Echosounder Calibration under Near-Field Conditions

Abstract
1. Introduction
2. Analysis of DOA Estimation in the Context of Mutual Coupling
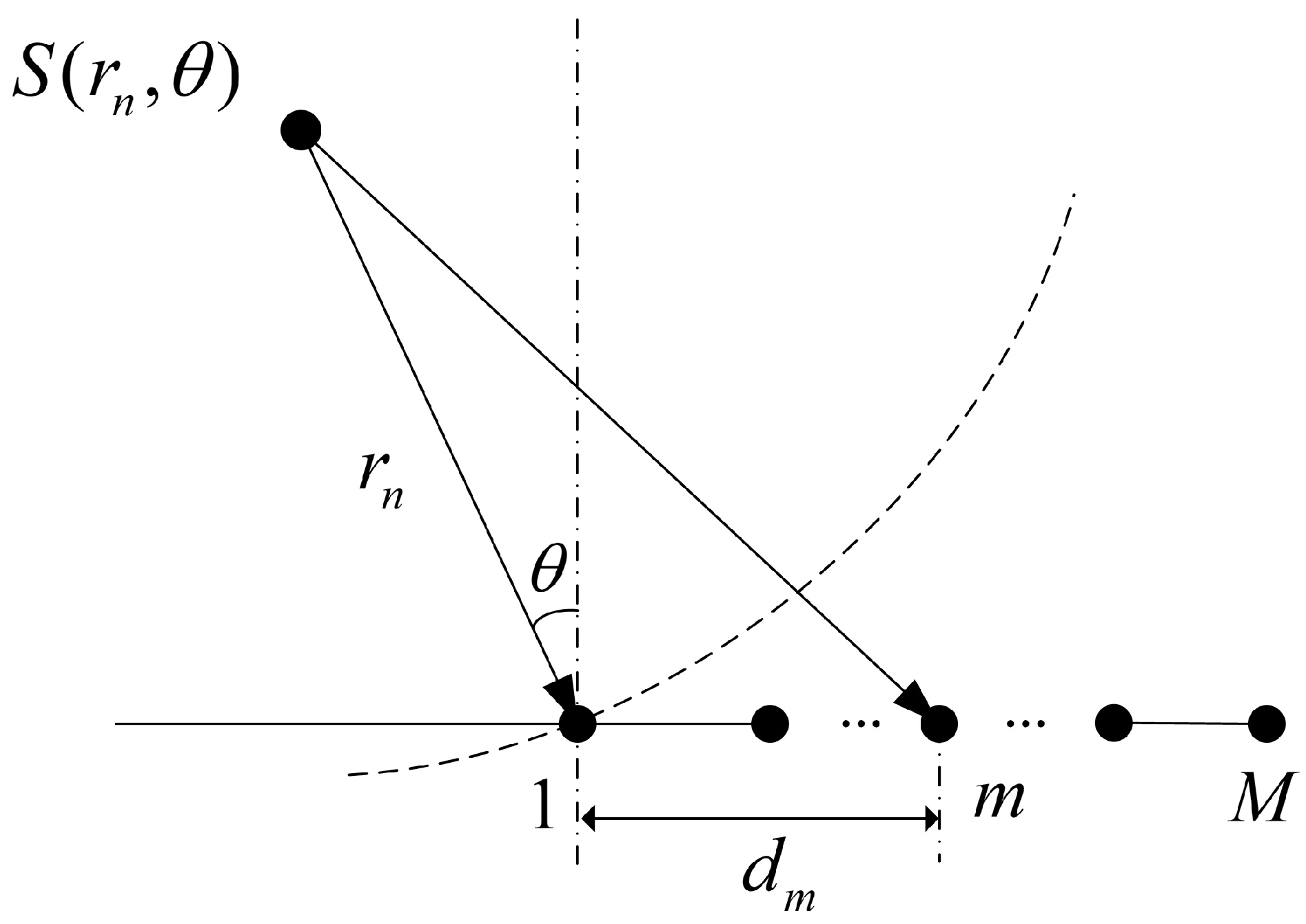
2.1. Near-Field Focused Beamforming Model
2.2. The Signal Model
3. Proposed Correction Method for MBES Receiving Arrays
3.1. Mathematic Model
3.2. Algorithm Principle
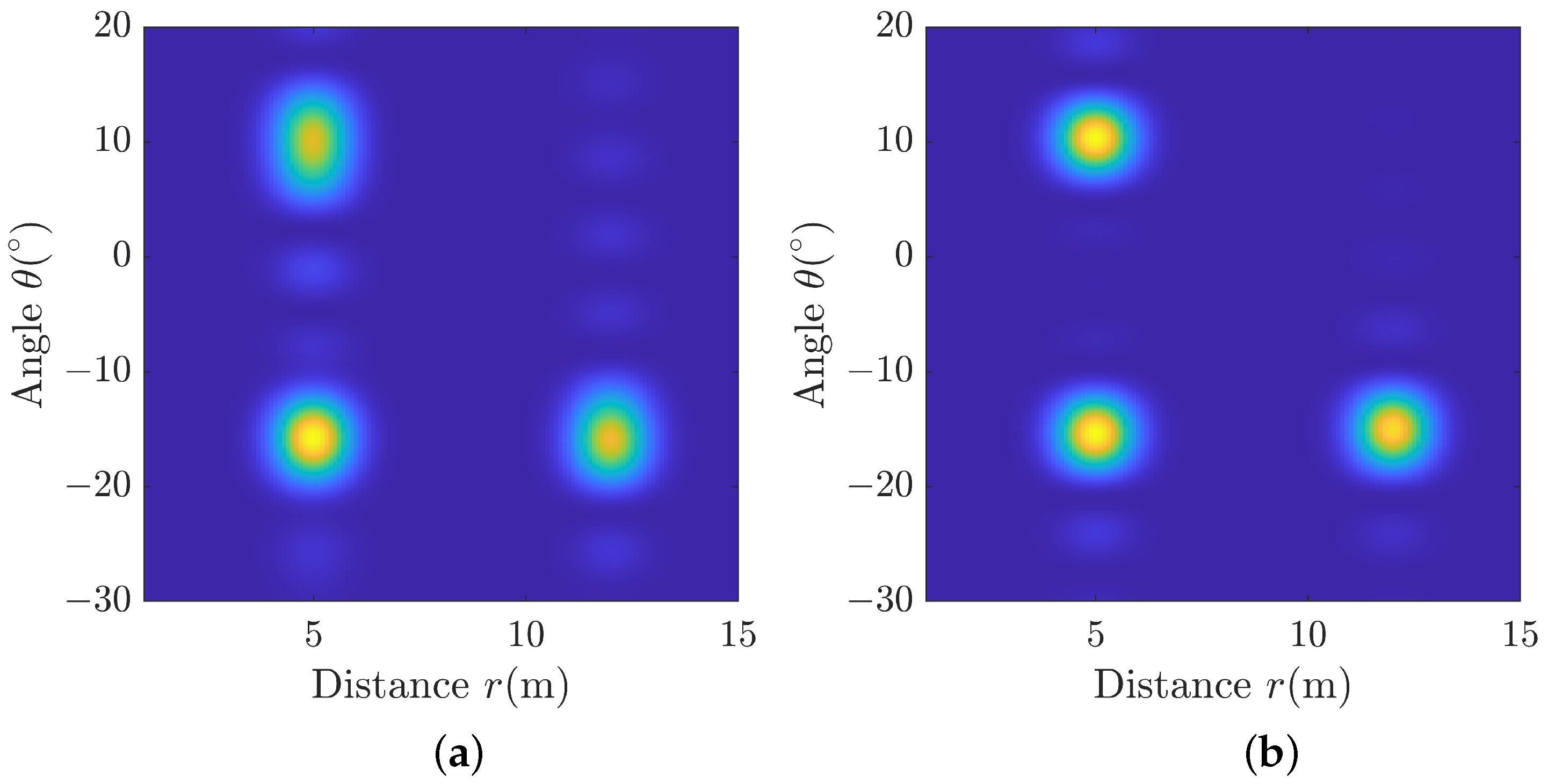
3.3. Performance of the Proposed Algorithm
4. Experimental Results
4.1. Mutual Coupling
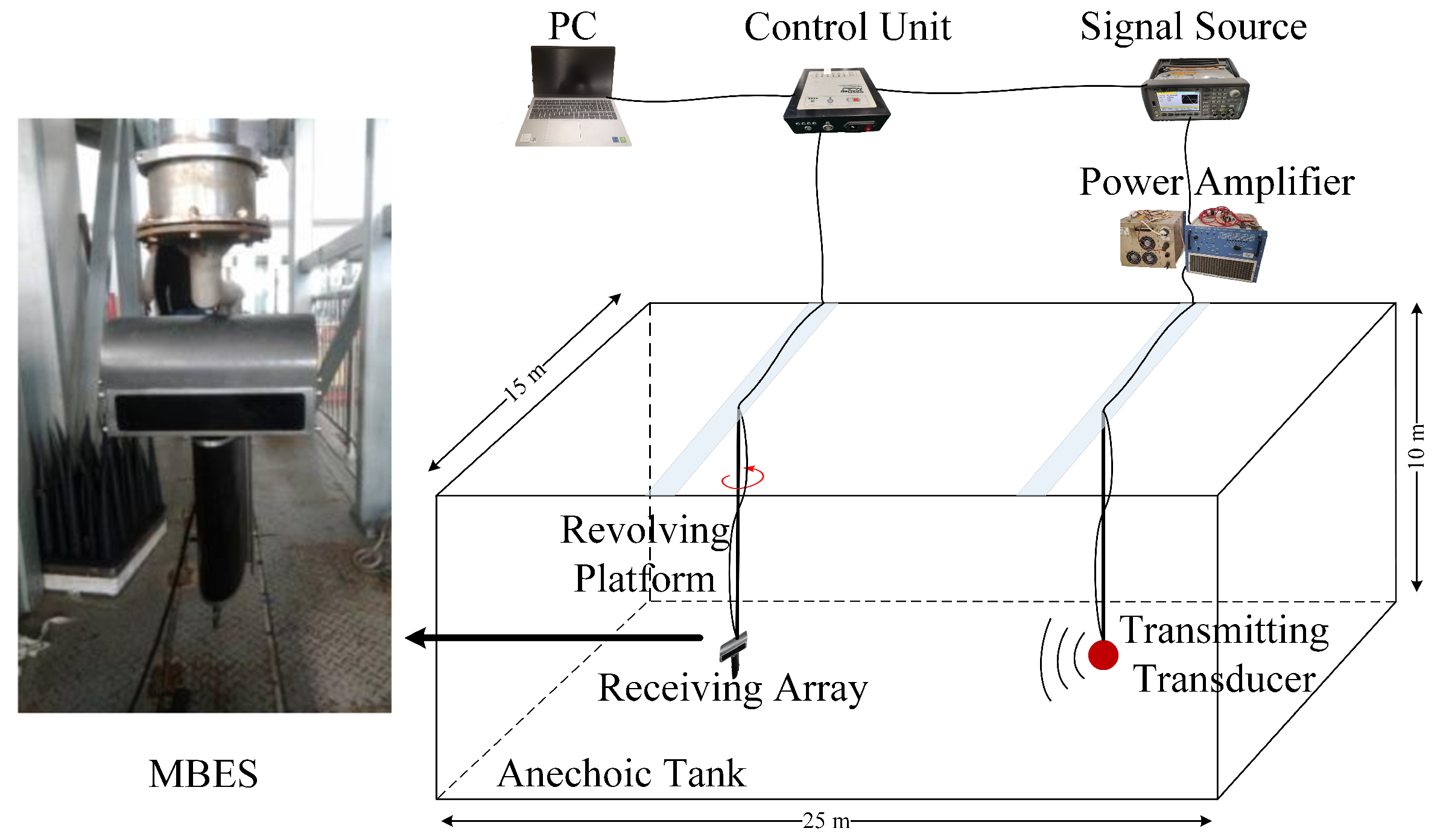
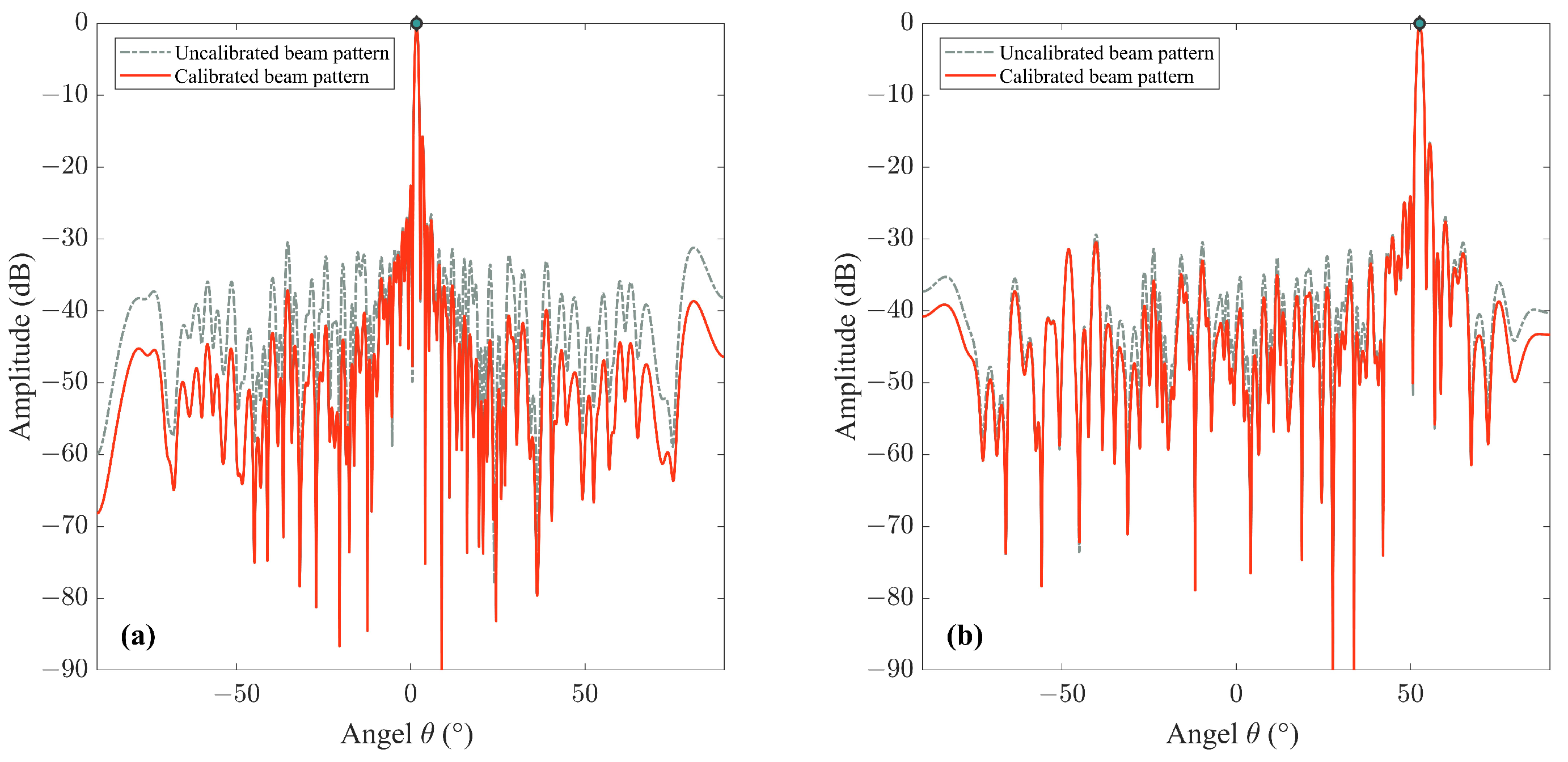
4.2. Tank Experiment
5. Discussion and Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| MBES | Multi-beam echosounder |
| DOA | Direction of arrival |
| STCA | Symmetric thinned coprime array |
| MCM | Mutual coupling matrix |
| ULA | Uniform linear array |
| FFT | Fast Fourier transform |
| CRB | Cramér–Rao bounds |
| SNR | Signal-to-noise ratio |
| RMSE | Root-mean-square error |
References
- Rubio, S.S.; Romero, A.S.; Andreo, F.C.; Gallero, R.G.; Rengel, J.; Rioja, L.; Callejo, J.; Bethencourt, M. Comparison between the employment of a multibeam echosounder on an unmanned surface vehicle and traditional photogrammetry as techniques for documentation and monitoring of shallow-water cultural heritage sites: A case study in the bay of Algeciras. J. Mar. Sci. Eng. 2023, 11, 1339. [Google Scholar]
- Zhang, W.; Zhou, T.; Li, J.; Xu, C. An efficient method for detection and quantitation of underwater gas leakage based on a 300-kHz multibeam sonar. Remote Sens. 2022, 14, 4301. [Google Scholar] [CrossRef]
- Wang, J.; Li, H.; Huo, G.; Li, C.; Wei, Y. A multi-beam seafloor constant false alarm detection method based on weighted element averaging. J. Mar. Sci. Eng. 2023, 11, 513. [Google Scholar] [CrossRef]
- Fascistam, A. Toward integrated large-scale environmental monitoring using WSN/UAV/Crowdsensing: A review of applications, signal processing, and future perspectives. Sensors 2022, 22, 1824. [Google Scholar] [CrossRef]
- Habib, A.; Zhou, T.; Masjedi, A.; Zhang, Z.; Evan Flatt, J.; Crawford, M. Boresight calibration of GNSS/INS-Assisted push-broom hyperspectral scanners on UAV platforms. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2018, 11, 1734–1749. [Google Scholar] [CrossRef]
- Dai, J.; Zhao, D.; Ji, X. A sparse representation method for DOA estimation with unknown mutual coupling. IEEE Antennas Wirel. Propag. Lett. 2012, 11, 1210–1213. [Google Scholar] [CrossRef]
- Zhang, J.; Qiu, T.; Luan, S. Robust Sparse Representation for DOA Estimation With Unknown Mutual Coupling Under Impulsive Noise. IEEE Commun. Lett. 2020, 24, 1455–1458. [Google Scholar] [CrossRef]
- Guo, R.; Li, W.; Zhang, Y.; Chen, Z. New direction of arrival estimation of coherent signals based on reconstructing matrix under unknown mutual coupling. J. Appl. Remote. Sens. 2016, 10, 015013. [Google Scholar] [CrossRef]
- Tang, W.; Jiang, H.; Zhang, Q. Off-Grid DOA estimation with mutual coupling via block log-sum minimization and iterative gradient descent. IEEE Wirel. Commun. Lett. 2022, 11, 343–347. [Google Scholar] [CrossRef]
- Li, H.; Wei, P. DOA estimation in an antenna array with mutual coupling based on ESPRIT. In Proceedings of the International Workshop on Microwave and Millimeter Wave Circuits and System Technology, Chengdu, China, 24–25 October 2013; pp. 86–89. [Google Scholar]
- Zhang, Q.; Li, J.; Li, Y.; Li, P. A DOA tracking method based on offset compensation using nested array. IEEE Trans. Circuits Syst. II Express Briefs 2021, 69, 1917–1921. [Google Scholar] [CrossRef]
- Pulipati, S.; Arivarathna, V.; Perera, S.M.; Wijenayake, C.; Belostotski, L.; Madanayake, A. Digital uncoupling of coupled multi-beam arrays. In Proceedings of the International Applied Computational Electromagnetics Society Symposium (ACES), Hamilton, ON, Canada, 1–5 August 2021; pp. 1–4. [Google Scholar]
- Liu, C.; Vaidyanathan, P.P. Super nested arrays: Linear sparse arrays with reduced mutual coupling—Part I: Fundamentals. IEEE Trans. Signal Process. 2016, 64, 3997–4012. [Google Scholar] [CrossRef]
- Mei, F.; Xu, H.; Jian, C.; Zhang, J. A super transformed nested array with reduced mutual coupling for direction of arrival estimation of non-circular signals. IET Radar Sonar Navig. 2022, 16, 799–814. [Google Scholar] [CrossRef]
- Friedlander, B.L.; Weiss, A.J. Direction finding in the presence of mutual coupling. IEEE Trans. Antennas Propag. 1991, 39, 273–284. [Google Scholar] [CrossRef]
- Svantesson, T. Modeling and estimation of mutual coupling in a uniform linear array of dipoles. In Proceedings of the IEEE International Conference on Acoustics, Speech, and Signal Processing (ICASSP), Phoenix, AZ, USA, 15–19 March 1999; pp. 2961–2964. [Google Scholar]
- Svantesson, T. Mutual coupling compensation using subspace fitting. In Proceedings of the IEEE Sensor Array and Multichannel Signal Processing Workshop (SAM), Cambridge, MA, USA, 17 March 2000; pp. 494–498. [Google Scholar]
- Liao, B.; Zhang, Z.; Chan, S. DOA estimation and tracking of ULAs with mutual coupling. IEEE Trans. Aerosp. Electron. Syst. 2012, 48, 891–905. [Google Scholar] [CrossRef]
- Hu, W.; Wang, Q. DOA estimation for UCA in the presence of mutual coupling via error model equivalence. IEEE Wirel. Commun. Lett. 2020, 9, 121–124. [Google Scholar] [CrossRef]
- Yuan, W.; Zhou, T.; Shen, J.; Du, W.; Wei, B.; Wang, T. Correction method for magnitude and phase variations in acoustic arrays based on focused beamforming. IEEE Trans. Instrum. Meas. 2020, 69, 6058–6069. [Google Scholar] [CrossRef]
- Zheng, Z.; Liu, K.; Wang, W.; Yang, Y.; Yang, J. Robust adaptive beamforming against mutual coupling based on mutual coupling coefficients estimation. IEEE Trans. Veh. Technol. 2017, 66, 9124–9133. [Google Scholar] [CrossRef]
- Wang, Y.; Wang, L.; Xie, J.; Trinkle, M.; Ng, B. DOA estimation under mutual coupling of uniform linear arrays using sparse reconstruction. IEEE Wirel. Commun. Lett. 2019, 8, 1004–1007. [Google Scholar] [CrossRef]
- Meng, D.; Wang, X.; Huang, M.; Yin, Y.; Shen, C.; Zhang, K. Reweighted nuclear norm minimisation for DOA estimation with unknown mutual coupling. Electron. Lett. 2019, 55, 346–347. [Google Scholar] [CrossRef]
- Wang, X.; Meng, D.; Huang, M.; Wan, L. Reweighted regularized sparse recovery for DOA estimation with unknown mutual coupling. IEEE Commun. Lett. 2019, 23, 290–293. [Google Scholar] [CrossRef]
- Licitra, G.; Artuso, F.; Bernardini, M.; Moro, A.; Fidecaro, F.; Fredianelli, L. Acoustic beamforming algorithms and their applications in environmental noise. Curr. Pollut. Rep. 2023, 9, 486–509. [Google Scholar] [CrossRef]
- Haxter, S.; Herold, G.; Huang, X.; Humphreys, W.; Leclère, Q.; Malgoezar, A.; Michel, U.; Padois, T.; Pereira, A.; Picard, C.; et al. A review of acoustic imaging methods using phased microphone arrays. CEAS Aeronaut J. 2019, 10, 197–230. [Google Scholar]
- Chiariotti, P.; Martarelli, M.; Castellini, P. Acoustic beamforming for noise source localization - reviews, methodology and applications. Mech. Syst. Signal Process. 2019, 120, 422–448. [Google Scholar] [CrossRef]
- Sun, S.; Wang, T.; Yang, H.; Chu, F. Damage identification of wind turbine blades using an adaptive method for compressive beamforming based on the generalized minimax-concave penalty function. Renew. Energy 2021, 181, 59–70. [Google Scholar] [CrossRef]
- Jiang, Y.; Xu, W.; Chen, L.; Pan, X. Near-field beamforming for a Multi-Beam Echo Sounder: Approximation and error analysis. In Proceedings of the OCEANS’10, Sydney, NSW, Australia, 24–27 May 2010; pp. 1–4. [Google Scholar]
- Singh, P.R.; Wang, Y.; Charge, P. Near field targets localization using bistatic MIMO system with spherical wavefront based model. In Proceedings of the 25th European Signal Processing Conference (EUSIPCO), Kos, Greece, 28 August–2 September 2017; pp. 2408–2412. [Google Scholar]
- Qi, C.; Chen, Z.; Zhang, Y.; Wang, Y. DOA estimation and self-calibration algorithm for multiple subarrays in the presence of mutual coupling. IEE Proc.-Radar Sonar Navig. 2006, 153, 333–337. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Step | The Procedure of Concrete Operations in the Proposed Method |
|---|---|
| Step 1 | A Fourier transform is applied to the output signal of each channel and the peak value is established in the frequency domain. |
| Step 2 | The covariance matrix is computed according to Equation (12). |
| Step 3 | Determine the subspace using Equation (11). |
| Step 4 | Define the mutual coupling vector . |
| Step 5 | Establish the steering vector for each r and . |
| Step 6 | Formulate the transformation matrix based on Equation (17). |
| Step 7 | Utilize and to calculate , followed by the derivation of . |
| Step 8 | Utilize Equation (24) to estimate the ranges and DOAs for N sources through the spectral function . |
| Step 9 | Establish each and compute MCM and as defined by Equations (8) and (23). |
| Source | Unknown Mutual Coupling | Proposed Method | Known Mutual Coupling | |
|---|---|---|---|---|
| Source 1 | Range | 11.9 m | 12.0 m | 12.0 m |
| DOA | ° | ° | ° | |
| Source 2 | Range | 5.0 m | 5.0 m | 5.0 m |
| DOA | ° | ° | ° | |
| Source 3 | Range | 4.9 m | 5.0 m | 5.0 m |
| DOA | ° | ° | ° | |
| Parameters | Value | Parameters | Value |
|---|---|---|---|
| Signal frequency | 200 kHz | Pulse width | 0.1 ms |
| Sampling rate | 85.356 kHz | Number of elements | 100 |
| Receiving distance | 10 m | Element spacing | 3.75 mm |
| Rotation rate | °/s | Sound velocity | 1486 m/s |
| Rotation accuracy | °/s | Transmission interval | 1 s |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, W.; Yuan, W.; Sun, G.; He, T.; Qu, J.; Xu, C. The Mitigation of Mutual Coupling Effects in Multi-Beam Echosounder Calibration under Near-Field Conditions. J. Mar. Sci. Eng. 2024, 12, 125. https://doi.org/10.3390/jmse12010125
Zhang W, Yuan W, Sun G, He T, Qu J, Xu C. The Mitigation of Mutual Coupling Effects in Multi-Beam Echosounder Calibration under Near-Field Conditions. Journal of Marine Science and Engineering. 2024; 12(1):125. https://doi.org/10.3390/jmse12010125
Chicago/Turabian StyleZhang, Wanyuan, Weijia Yuan, Gongwu Sun, Tengjiao He, Junqi Qu, and Chao Xu. 2024. "The Mitigation of Mutual Coupling Effects in Multi-Beam Echosounder Calibration under Near-Field Conditions" Journal of Marine Science and Engineering 12, no. 1: 125. https://doi.org/10.3390/jmse12010125
APA StyleZhang, W., Yuan, W., Sun, G., He, T., Qu, J., & Xu, C. (2024). The Mitigation of Mutual Coupling Effects in Multi-Beam Echosounder Calibration under Near-Field Conditions. Journal of Marine Science and Engineering, 12(1), 125. https://doi.org/10.3390/jmse12010125