
The Non-Singular Terminal Sliding Mode Control of Underactuated Unmanned Surface Vessels Using Biologically Inspired Neural Network


Abstract
1. Introduction
- (1)
- A virtual control law is constructed with BINN, which avoids the differential explosion problem in the system and suppresses input saturation. The BINN is easy to construct during the design process, thus reducing the difficulty of controller design.
- (2)
- The proposed controllers incorporating NTSM and BINN can improve the response speed of the controller, solve the problem of singular values, and reduce the chattering phenomenon of the controller. An NESO is used to observe the unknown disturbances and compensating in the controller to enhance system security.
2. Mathematical Modeling and Problem Formulation
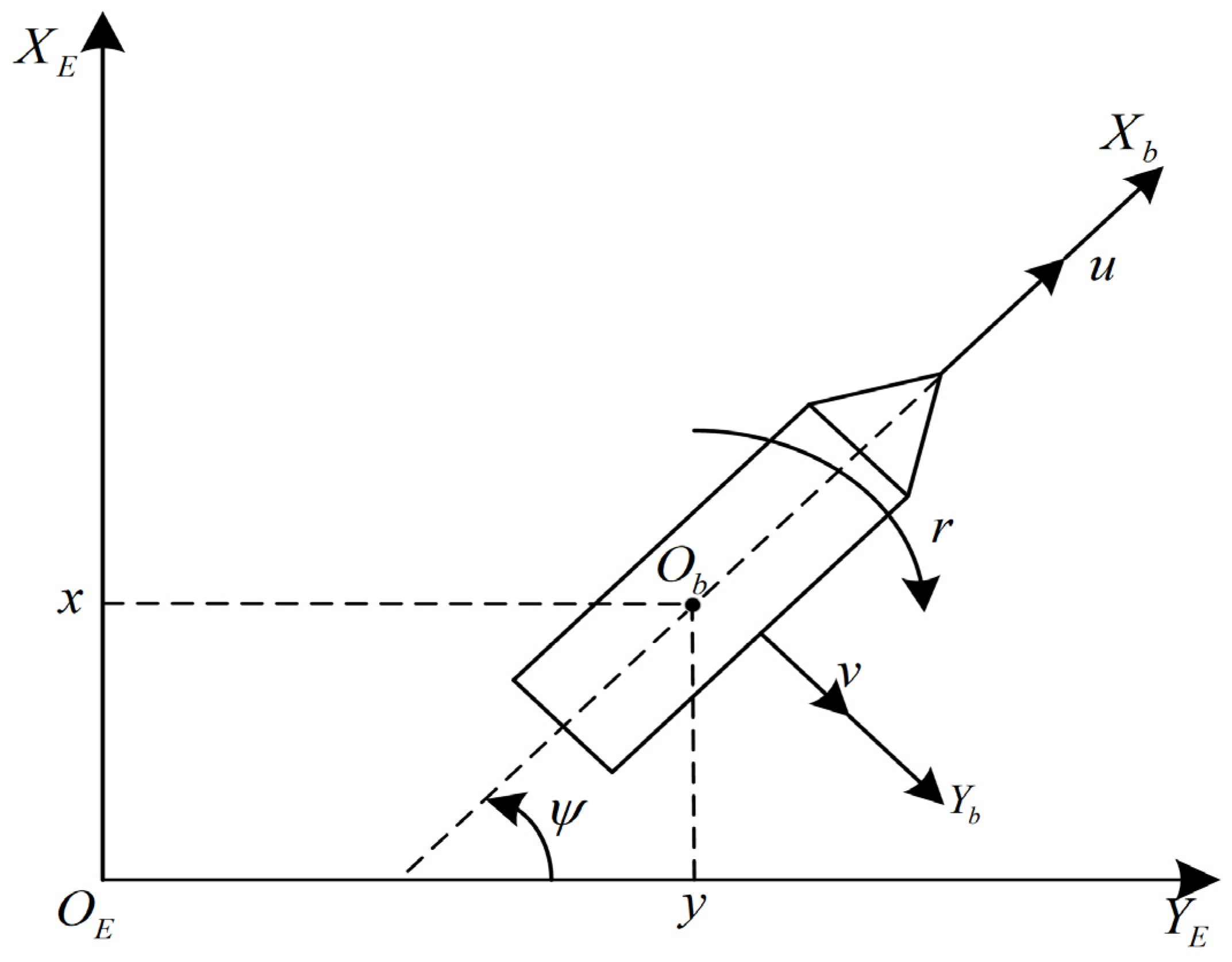
2.1. Underactuated Unmanned Surface Vessel Mathematical Motion Model
2.2. Overview of Biologically Inspired Neural Network
3. Controller Design and Stability Analysis
3.1. Virtual Control Law Design
3.2. Nonlinear Extended State Observer Design
3.3. Controller Design
3.3.1. Surge Motion Controller Design Using Biologically Inspired Neural Network
3.3.2. Design of Yaw Motion Controller Using Biologically Inspired Neural Network
3.4. Stability Analysis
4. Simulation Studies
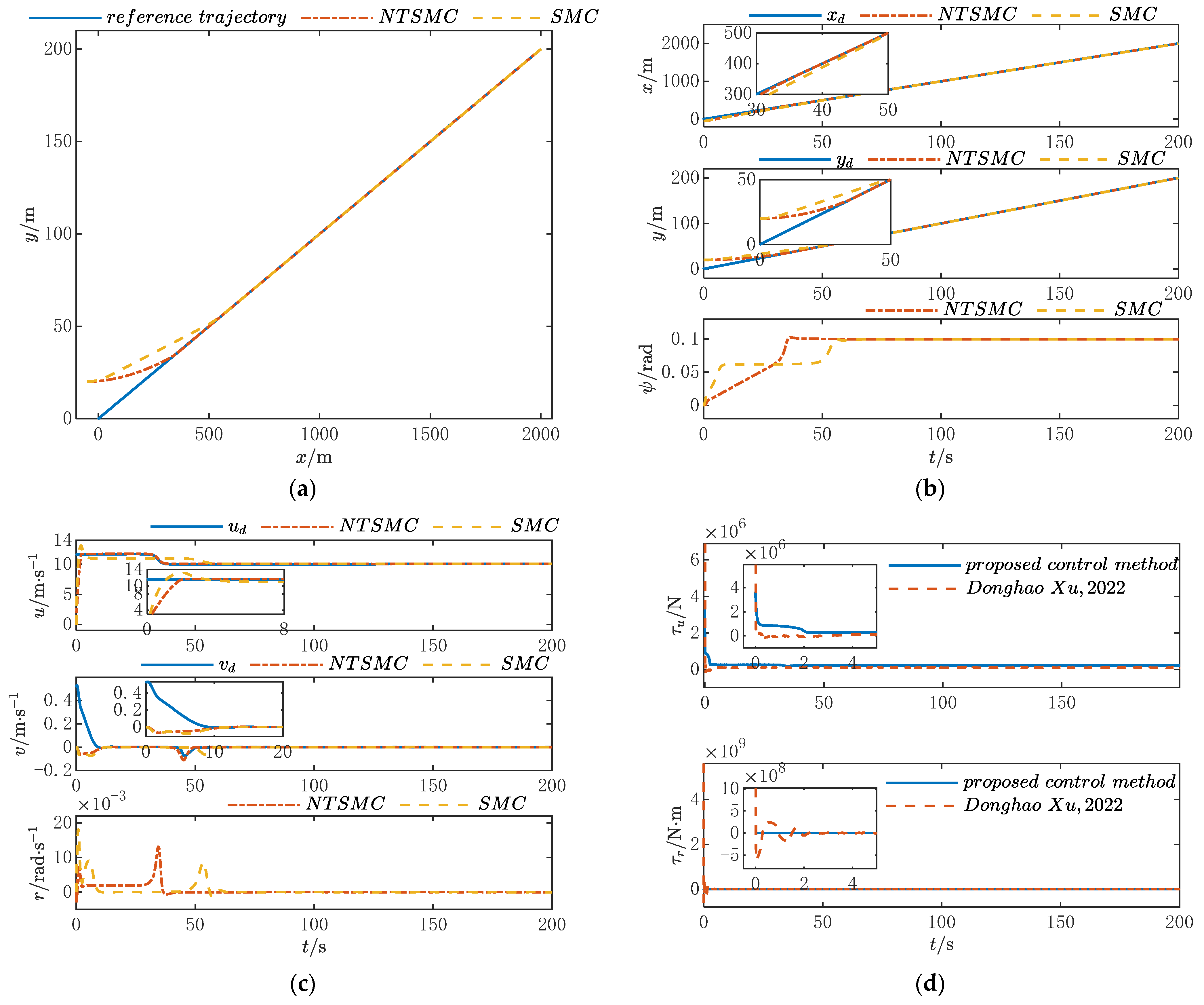
4.1. Trajectory Tracking on a Straight Path
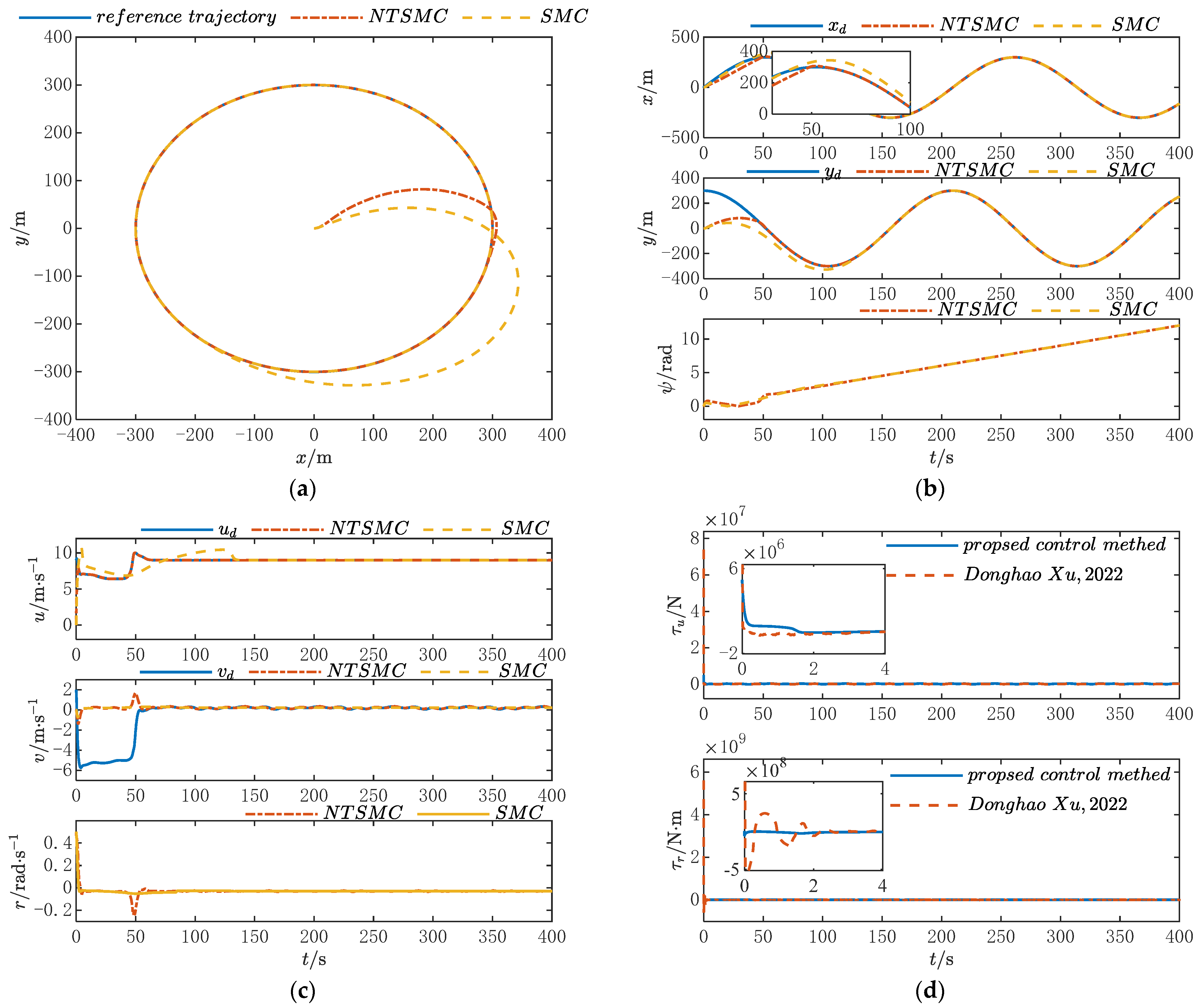
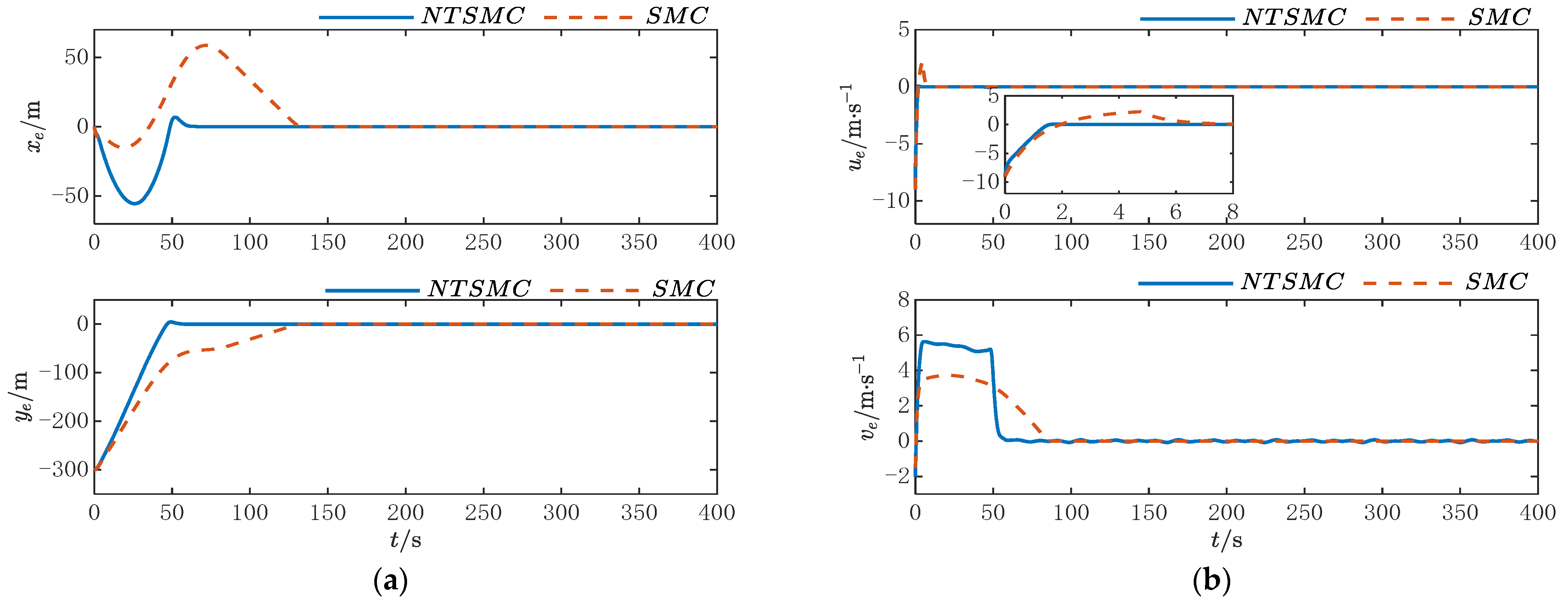
4.2. Trajectory Tracking on a Circular Path
5. Conclusions
- (1)
- The design of the virtual control law simplifies the trajectory tracking problem by converting the initial large position error into a smaller velocity error and achieves USV trajectory tracking control by stabilizing the velocity error. This approach significantly reduces the complexity of control and holds great practical significance.
- (2)
- The BINN can effectively deal with the issue of controller input saturation during USV navigation, which enhances USV performance in terms of safety. The BINN simplifies the controller design process, resulting in faster derivation and smaller computational requirements, resulting in a smooth and bounded output system.
- (3)
- The proposed NTSM controllers using BINN exhibit better control performance than SMC. Furthermore, this proposed approach effectively minimizes position and velocity errors to zero within a short time, increasing the response speed of the system and improving overall accuracy.
- (4)
- A NESO has been designed to accurately observe the unknown environmental disturbances, the position and velocity information of the USV, and the designed NESO is verified to effectively counteract the influence of disturbances on the USV through two cases of different marine environments, which shows that the robustness and stability of the system has been improved.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Liu, Z.X.; Zhang, Y.M. Unmanned Surface Vehicles: An Overview of Developments and Challenges. Annu. Rev. Control 2016, 41, 71–93. [Google Scholar] [CrossRef]
- Wu, G.X.; Ding, Y. Adaptive Neural Network and Extended State Observer-Based Non-Singular Terminal Sliding Modetracking Control for an Underactuated Usv with Unknown Uncertainties. Appl. Ocean Res. 2023, 135, 103560. [Google Scholar] [CrossRef]
- Zou, L.; Liu, H. Robust Neural Network Trajectory-Tracking Control of Underactuated Surface Vehicles Considering Uncertainties and Unmeasurable Velocities. IEEE Access 2021, 9, 117629–117638. [Google Scholar] [CrossRef]
- Gao, L.; Liu, X. Finite-Time Sliding Mode Trajectory Tracking Control of an Autonomous Surface Vehicle with Prescribed Performance. Ocean Eng. 2023, 284, 114919. [Google Scholar] [CrossRef]
- Qiu, B.B.; Wang, G.F. Predictor Los-Based Trajectory Linearization Control for Path Following of Underactuated Unmanned Surface Vehicle with Input Saturation. Ocean Eng. 2020, 214, 107874. [Google Scholar] [CrossRef]
- Gao, S.; Liu, C.P. Augmented Model-Based Dynamic Positioning Predictive Control for Underactuated Unmanned Surface Vessels with Dual-Propellers. Ocean Eng. 2022, 266, 112885. [Google Scholar] [CrossRef]
- Yu, J.P.; Shi, P. Finite-Time Command Filtered Backstepping Control for a Class of Nonlinear Systems. Automatica 2018, 92, 173–180. [Google Scholar] [CrossRef]
- Zhao, Y.S.; Sun, X.J. Adaptive Backstepping Sliding Mode Tracking Control for Underactuated Unmanned Surface Vehicle with Disturbances and Input Saturation. IEEE Access 2021, 9, 1304–1312. [Google Scholar] [CrossRef]
- Ahmed, S.; Azar, A.T. Adaptive Fault Tolerant Non-Singular Sliding Mode Control for Robotic Manipulators Based on Fixed-Time Control Law. Actuators 2022, 11, 353. [Google Scholar] [CrossRef]
- Gao, T.T.; Liu, Y.J. Adaptive Neural Control Using Tangent Time-Varying Blfs for a Class of Uncertain Stochastic Nonlinear Systems with Full State Constraints. IEEE Trans. Cybern. 2021, 51, 1943–1953. [Google Scholar] [CrossRef]
- Ahmed, S.; Azar, A.T. Adaptive Fractional Tracking Control of Robotic Manipulator Using Fixed-Time Method. Complex Intell. Syst. 2023, 7, 01164. [Google Scholar] [CrossRef]
- Ahmed, S.; Azar, A.T. Adaptive Control Design for Euler-Lagrange Systems Using Fixed-Time Fractional Integral Sliding Mode Scheme. Fractal Fract. 2023, 7, 712. [Google Scholar] [CrossRef]
- Dai, S.L.; He, S. Adaptive Neural Control of Underactuated Surface Vessels with Prescribed Performance Guarantees. IEEE Trans. Neural Netw. Learn. Syst. 2019, 30, 3686–3698. [Google Scholar] [CrossRef] [PubMed]
- Dai, S.L.; He, S.D. Transverse Function Approach to Practical Stabilisation of Underactuated Surface Vessels with Modelling Uncertainties and Unknown Disturbances. IET Control Theory Appl. 2017, 11, 2573–2584. [Google Scholar] [CrossRef]
- Loría, A. Observers Are Unnecessary for Output-Feedback Control of Lagrangian Systems. IEEE Trans. Autom. Control 2016, 61, 905–920. [Google Scholar] [CrossRef]
- Liu, C.; Hu, Q.Z. Event-Triggered-Based Nonlinear Model Predictive Control for Trajectory Tracking of Underactuated Ship with Multi-Obstacle Avoidance. Ocean Eng. 2022, 253, 111278. [Google Scholar] [CrossRef]
- Tang, L.G.; Wang, L. An Enhanced Trajectory Tracking Control of the Dynamic Positioning Ship Based on Nonlinear Model Predictive Control and Disturbance Observer. Ocean Eng. 2022, 265, 112482. [Google Scholar] [CrossRef]
- Du, P.Z.; Yang, W.C. A Novel Adaptive Backstepping Sliding Mode Control for a Lightweight Autonomous Underwater Vehicle with Input Saturation. Ocean Eng. 2022, 263, 112362. [Google Scholar] [CrossRef]
- Chen, H.; Li, J.J. Adaptive Backstepping Fast Terminal Sliding Mode Control of Dynamic Positioning Ships with Uncertainty and Unknown Disturbances. Ocean Eng. 2023, 281, 114925. [Google Scholar] [CrossRef]
- Edwards, C.; Shtessel, Y. Adaptive Continuous Higher Order Sliding Mode Control. IFAC Proc. 2014, 47, 10826–10831. [Google Scholar] [CrossRef]
- Najafi, A.; Vu, M.T. Adaptive Barrier Fast Terminal Sliding Mode Actuator Fault Tolerant Control Approach for Quadrotor Uavs. Mathematics 2022, 10, 3009. [Google Scholar] [CrossRef]
- Souissi, S.; Boukattaya, M. Time-Varying Nonsingular Terminal Sliding Mode Control of Autonomous Surface Vehicle with Predefined Convergence Time. Ocean Eng. 2022, 263, 112264. [Google Scholar] [CrossRef]
- Alattas, K.A.; Mobayen, S. Design of a Non-Singular Adaptive Integral-Type Finite Time Tracking Control for Nonlinear Systems with External Disturbances. IEEE Access 2021, 9, 102091–102103. [Google Scholar] [CrossRef]
- Mofid, O.; Amirkhani, S. Finite-Time Convergence of Perturbed Nonlinear Systems Using Adaptive Barrier-Function Nonsingular Sliding Mode Control with Experimental Validation. J. Vib. Control 2023, 29, 3326–3339. [Google Scholar] [CrossRef]
- Mobayen, S.; Bayat, F. Barrier Function-Based Adaptive Nonsingular Terminal Sliding Mode Control Technique for a Class of Disturbed Nonlinear Systems. ISA Trans. 2023, 134, 481–496. [Google Scholar] [CrossRef] [PubMed]
- Taame, A.; Lachkar, I. Modeling of an Unmanned Aerial Vehicle and Trajectory Tracking Control Using Backstepping Approach. IFAC Pap. 2022, 55, 276–281. [Google Scholar] [CrossRef]
- Swaroop, D.; Hedrick, J.K. Dynamic Surface Control for a Class of Nonlinear Systems. IEEE Trans. Autom. Control 2000, 45, 1893–1899. [Google Scholar] [CrossRef]
- Han, S.I. Fuzzy Supertwisting Dynamic Surface Control for Mimo Strict-Feedback Nonlinear Dynamic Systems with Supertwisting Nonlinear Disturbance Observer and a New Partial Tracking Error Constraint. IEEE Trans. Fuzzy Syst. 2019, 27, 2101–2114. [Google Scholar] [CrossRef]
- Dong, W.J.; Farrell, J.A. Command Filtered Adaptive Backstepping. IEEE Trans. Control Syst. Technol. 2012, 20, 566–580. [Google Scholar] [CrossRef]
- Yang, S.X.; Meng, M. Real-Time Collision-Free Path Planning of Robot Manipulators Using Neural Network Approaches. In Proceedings of the 1999 IEEE International Symposium on Computational Intelligence in Robotics and Automation, Monterey, CA, USA, 8–9 November 1999; pp. 47–52. [Google Scholar]
- Tan, D.X.; Xu, H.L. Formation Control of Multiple Auvs Based on Biological Inspiration and Environmental Perception. Moderncomputer 2021, 15, 117–122. [Google Scholar]
- Pan, C.Z.; Cui, C.C. Stabilization of Underactuated Horizontal Tora Based on Biologically Inspired Model with Mounded Input. Control Decis. 2021, 37, 1153–1159. [Google Scholar]
- Ghaffari, V.; Mobayen, S. Robust Tracking Composite Nonlinear Feedback Controller Design for Time-Delay Uncertain Systems in the Presence of Input Saturation. ISA Trans. 2022, 129, 88–99. [Google Scholar] [CrossRef] [PubMed]
- Fan, Y.S.; Shi, Y.P. Global Fixed-Time Adaptive Fuzzy Path Following Control for Unmanned Surface Vehicles Subject to Lumped Uncertainties and Actuator Saturation. Ocean Eng. 2023, 286, 115533. [Google Scholar] [CrossRef]
- Ding, F.; Huang, J. Dynamic Surface Control with a Nonlinear Disturbance Observer for Multi-Degree of Freedom Underactuated Mechanical Systems. Int. J. Robust Nonlinear Control 2022, 32, 7809–7827. [Google Scholar] [CrossRef]
- Rojsiraphisal, T.; Mobayen, S. Fast Terminal Sliding Control of Underactuated Robotic Systems Based on Disturbance Observer with Experimental Validation. Mathematics 2021, 9, 1935. [Google Scholar] [CrossRef]
- He, Y.H.; Wu, Y.Z. Nonlinear Extended State Observer-Based Adaptive Higher-Order Sliding Mode Control for Parallel Antenna Platform with Input Saturation. Nonlinear Dyn. 2023, 111, 16111–16132. [Google Scholar] [CrossRef]
- Xiong, S.F.; Wang, W.H. A Novel Extended State Observer. ISA Trans. 2015, 58, 309–317. [Google Scholar] [CrossRef] [PubMed]
- Do, K.D.; Jiang, Z.P. Robust Adaptive Path Following of Underactuated Ships. Automatica 2004, 40, 929–944. [Google Scholar] [CrossRef]
- Hodgkin, A.L. A Quantitative Description of Membrane Currents and Its Application to Conduction and Excitation in Nerve. J. Physiol. 1952, 117, 500–544. [Google Scholar] [CrossRef]
- Cohen, M.A.; Grossberg, S. Absolute Stability of Global Pattern Formation and Parallel Memory Storage by Competitive Neural Networks. IEEE Trans. Syst. 1983, SMC-13, 815–826. [Google Scholar] [CrossRef]
- Liu, L.; Wang, D. State Recovery and Disturbance Estimation of Unmanned Surface Vehicles Based on Nonlinear Extended State Observers. Ocean Eng. 2019, 171, 625–632. [Google Scholar] [CrossRef]
- Moulay, E.; Perruquetti, W. Finite Time Stability and Stabilization of a Class of Continuous Systems. J. Math. Anal. Appl. 2005, 323, 1430–1443. [Google Scholar] [CrossRef]
- Do, K.D.; Jiang, Z.P. Universal Controllers for Stabilization and Tracking of Underactuated Ships. Syst. Control Lett. 2002, 47, 299–317. [Google Scholar] [CrossRef]
- Xu, D.H.; Liu, Z.P. Finite Time Trajectory Tracking with Full-State Feedback of Underactuated Unmanned Surface Vessel Based on Nonsingular Fast Terminal Sliding Mode. J. Mar. Sci. Eng. 2022, 10, 1845. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Units |
|---|---|---|
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, D.; Li, Z.; Xin, P.; Zhou, X. The Non-Singular Terminal Sliding Mode Control of Underactuated Unmanned Surface Vessels Using Biologically Inspired Neural Network. J. Mar. Sci. Eng. 2024, 12, 112. https://doi.org/10.3390/jmse12010112
Xu D, Li Z, Xin P, Zhou X. The Non-Singular Terminal Sliding Mode Control of Underactuated Unmanned Surface Vessels Using Biologically Inspired Neural Network. Journal of Marine Science and Engineering. 2024; 12(1):112. https://doi.org/10.3390/jmse12010112
Chicago/Turabian StyleXu, Donghao, Zelin Li, Ping Xin, and Xueqian Zhou. 2024. "The Non-Singular Terminal Sliding Mode Control of Underactuated Unmanned Surface Vessels Using Biologically Inspired Neural Network" Journal of Marine Science and Engineering 12, no. 1: 112. https://doi.org/10.3390/jmse12010112
APA StyleXu, D., Li, Z., Xin, P., & Zhou, X. (2024). The Non-Singular Terminal Sliding Mode Control of Underactuated Unmanned Surface Vessels Using Biologically Inspired Neural Network. Journal of Marine Science and Engineering, 12(1), 112. https://doi.org/10.3390/jmse12010112