
Cooperative Maritime Search of Multi-Ship Based on Improved Robust Line-of-Sight Guidance


Abstract
1. Introduction
- (1)
- In previous work [3,4], the maritime search has been conducted by an individual ship. Compared with an individual maritime search operation [3,4], the cooperative maritime search based on the improved creeping line search method is presented in this paper, which is more efficient within stringent time.
- (2)
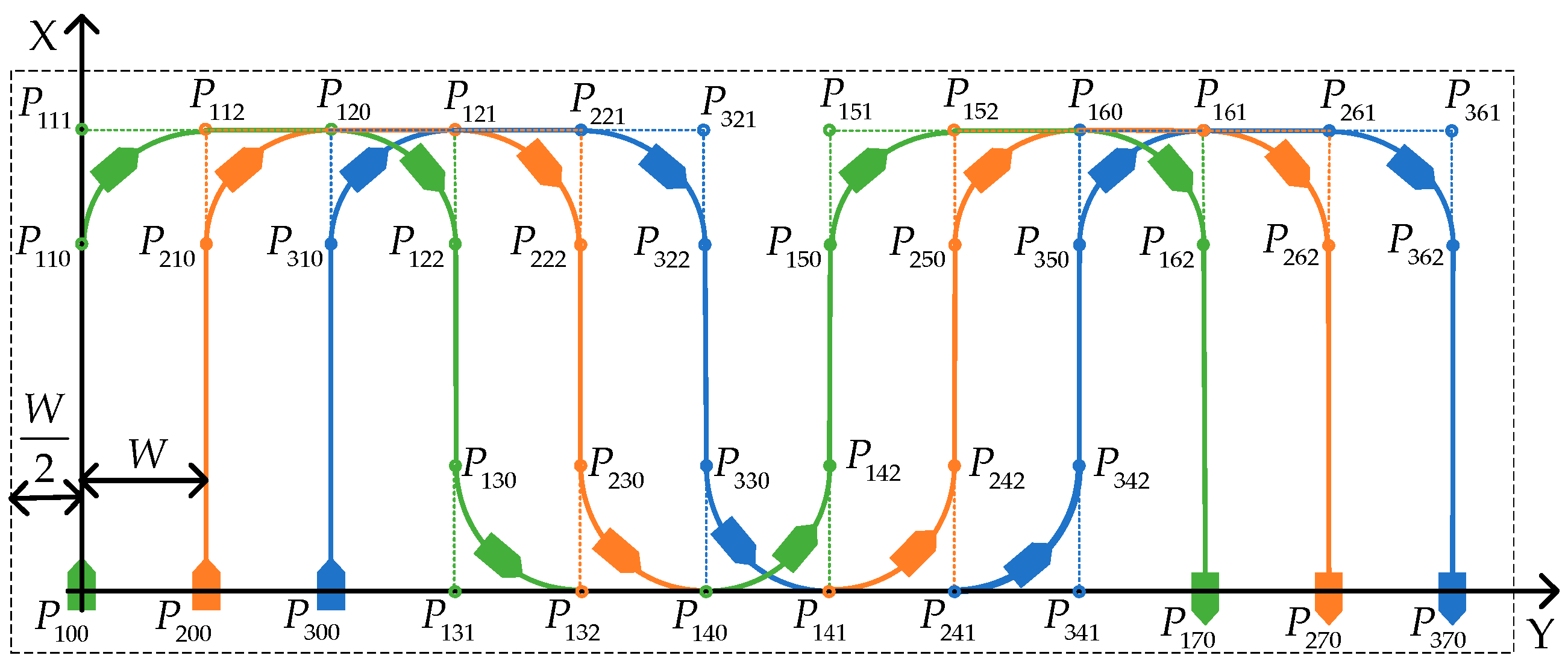
- Compared with the traditional creeping line search method [6] with transition points with corners, which is impossible for ships to track, the presented improved creeping line search method smooths the transition points with corners based on the Bezier curve; then, a smooth reference path can be obtained.
- (3)
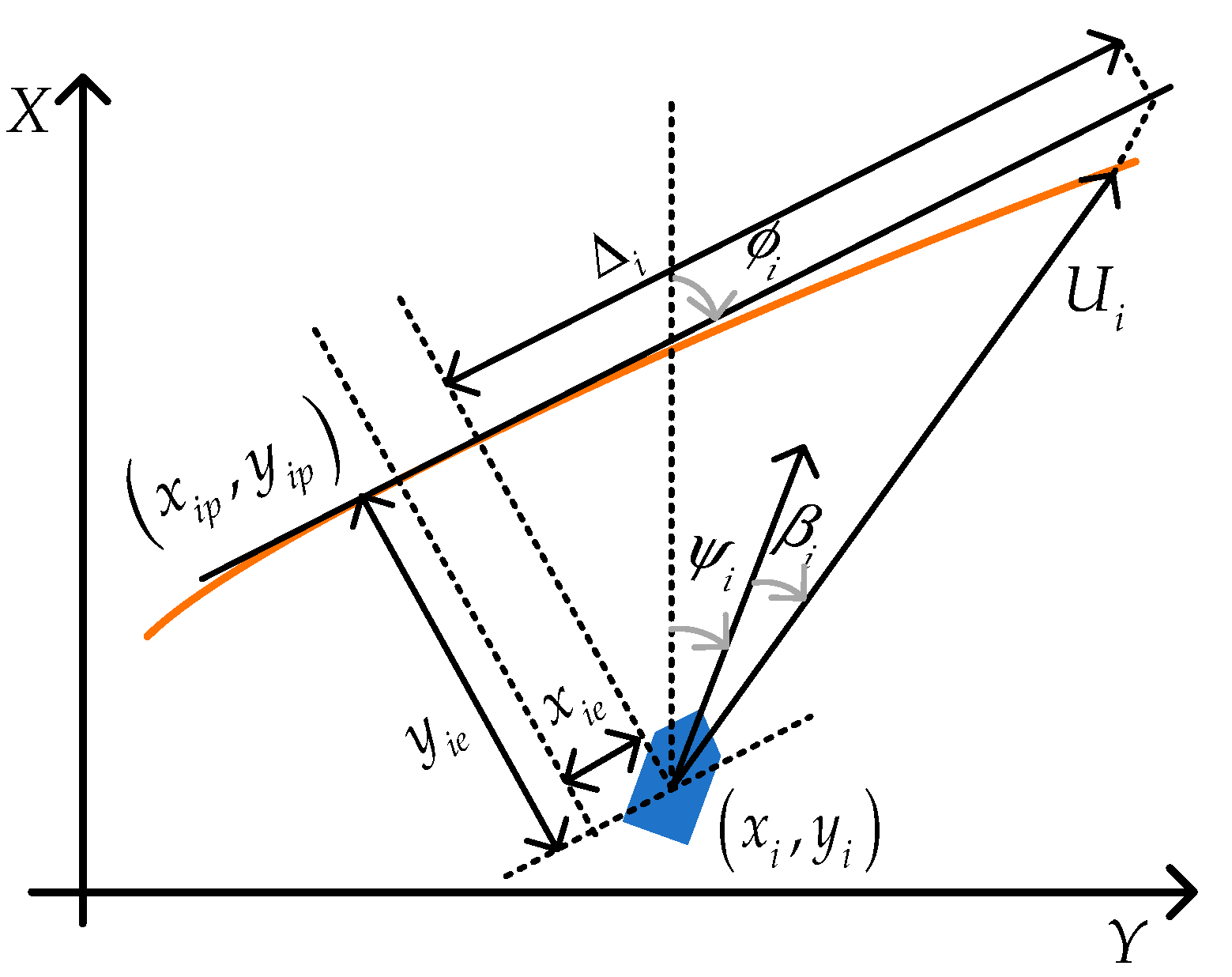
- The RLOS guidance method [18] compensates the kinematic uncertainty by exploring the idea of sliding mode; however, the chattering effect always exists. Considering the shortcoming of the RLOS guidance method, an improved RLOS guidance method with less chattering effect is presented in this paper for the first time by employing the idea of robust adaptive control.
- (4)
- Considering the unknown nonlinear model dynamics and time-varying disturbances, the FLS is incorporated into the design of the controller to approximate the unknown nonlinear functions; then, the improved RLOS guidance-based fuzzy sliding mode controller is presented for the cooperative maritime search operation.
2. Preliminaries and Problem Formulation
2.1. Mathematical Model of Underactuated Ships
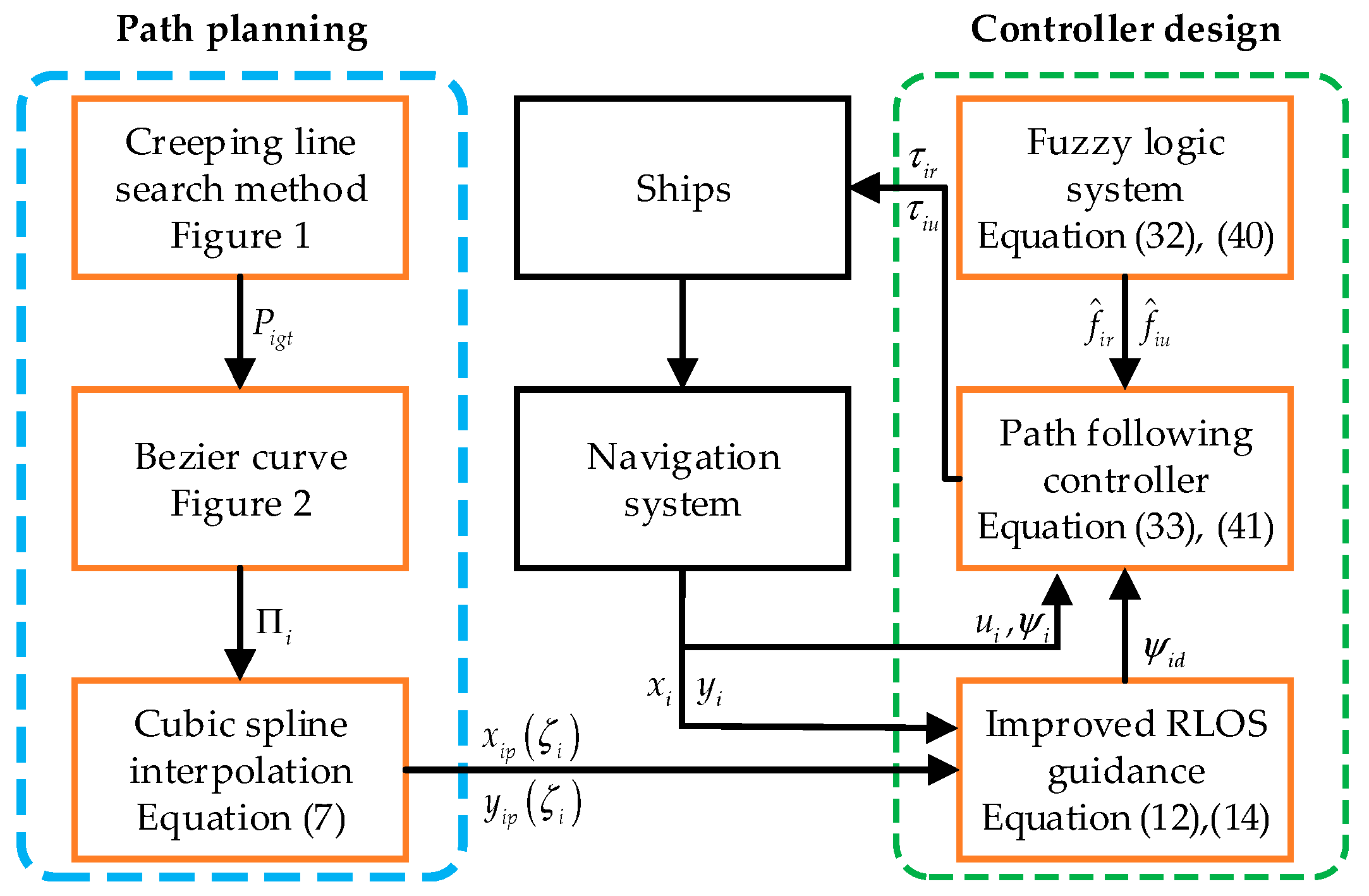
2.2. A Novel Path Planning Method
2.2.1. Improved Creeping Line Search Method
2.2.2. Cubic Spline Interpolation
2.3. Improved RLOS Guidance
2.4. Fuzzy Logic System
2.5. Problem Formulation
3. Controller Design
3.1. Yaw Controller
3.2. Surge Controller
4. Simulations
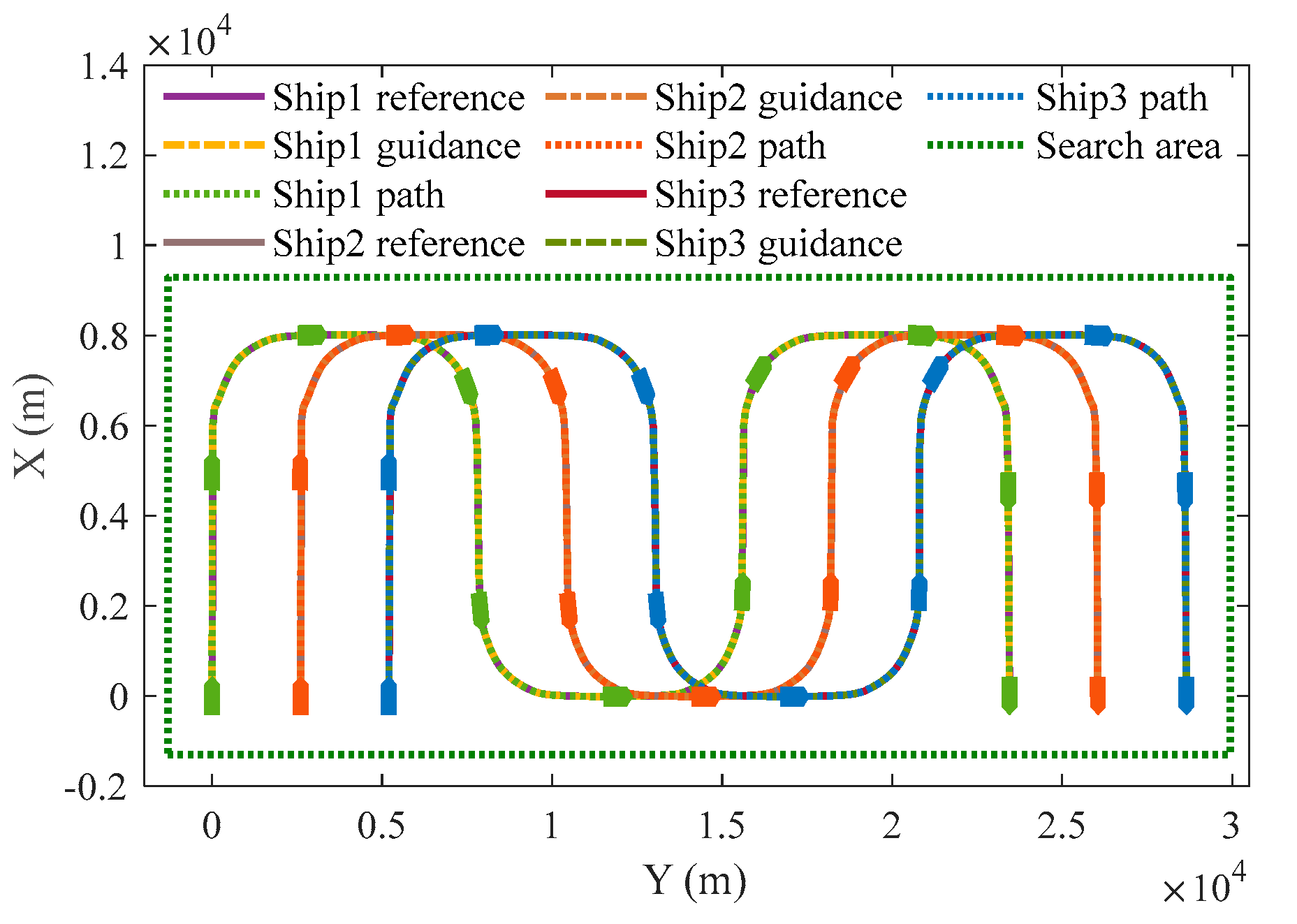
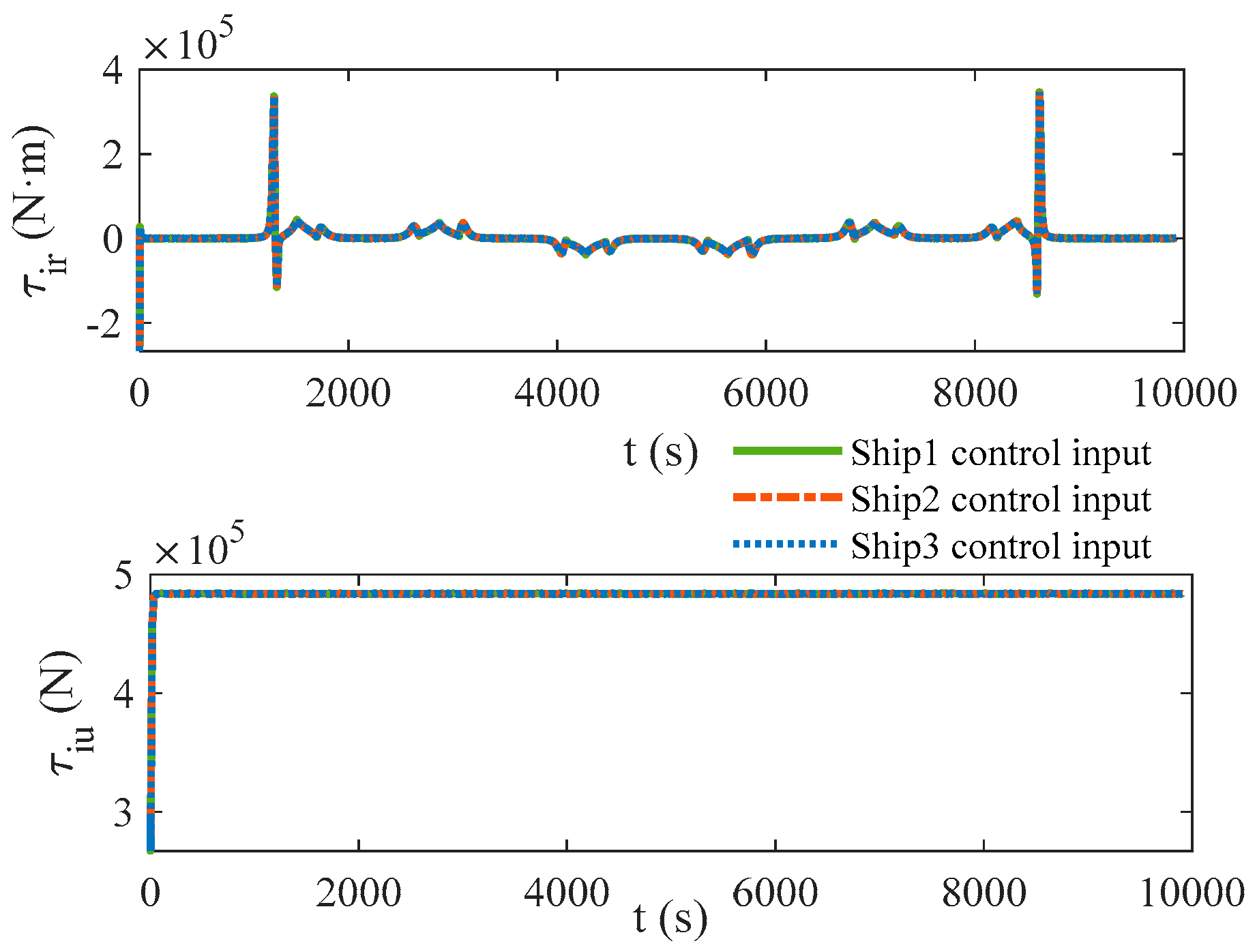
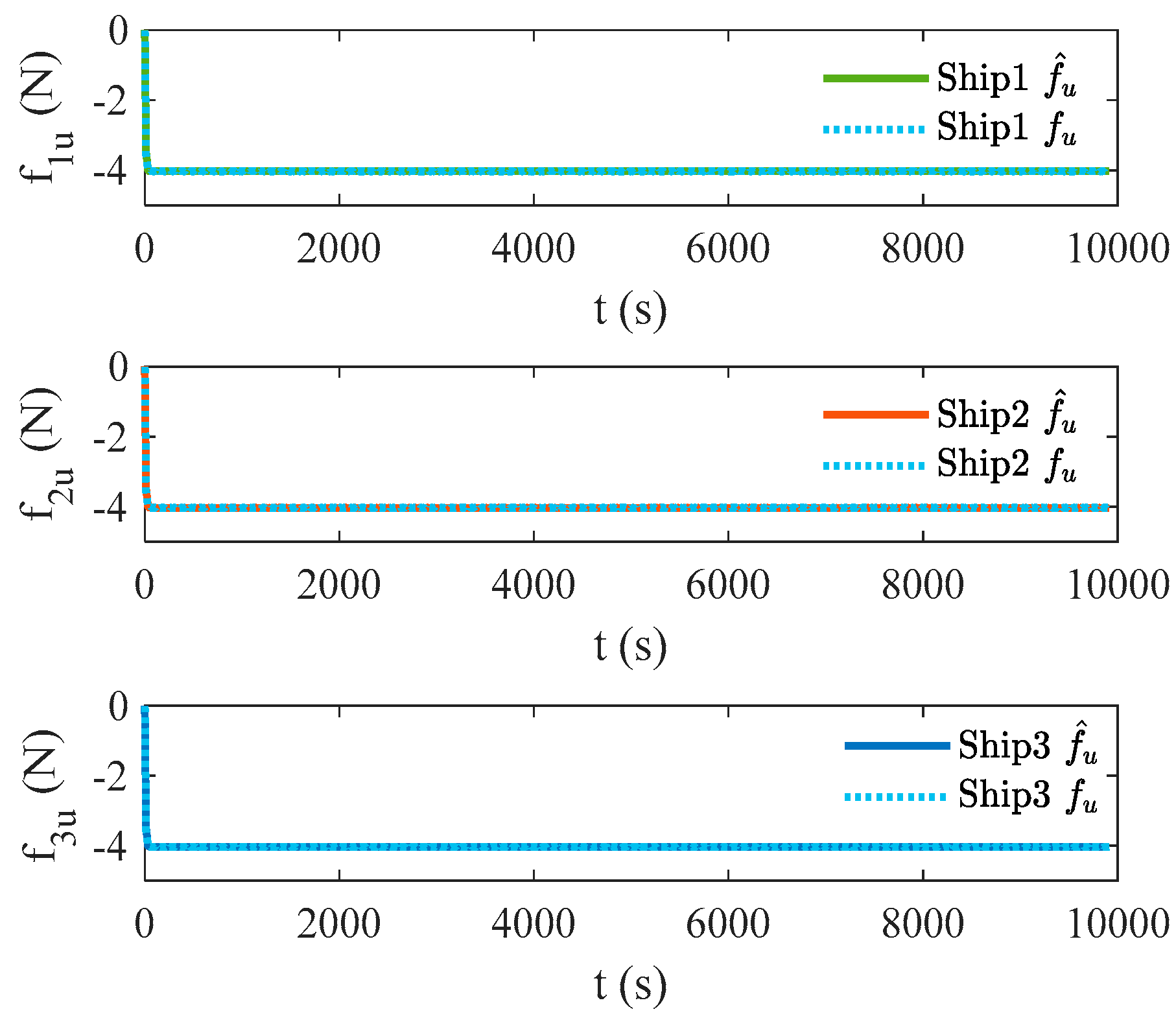
4.1. Three-Ship Cooperative Maritime Search Operation
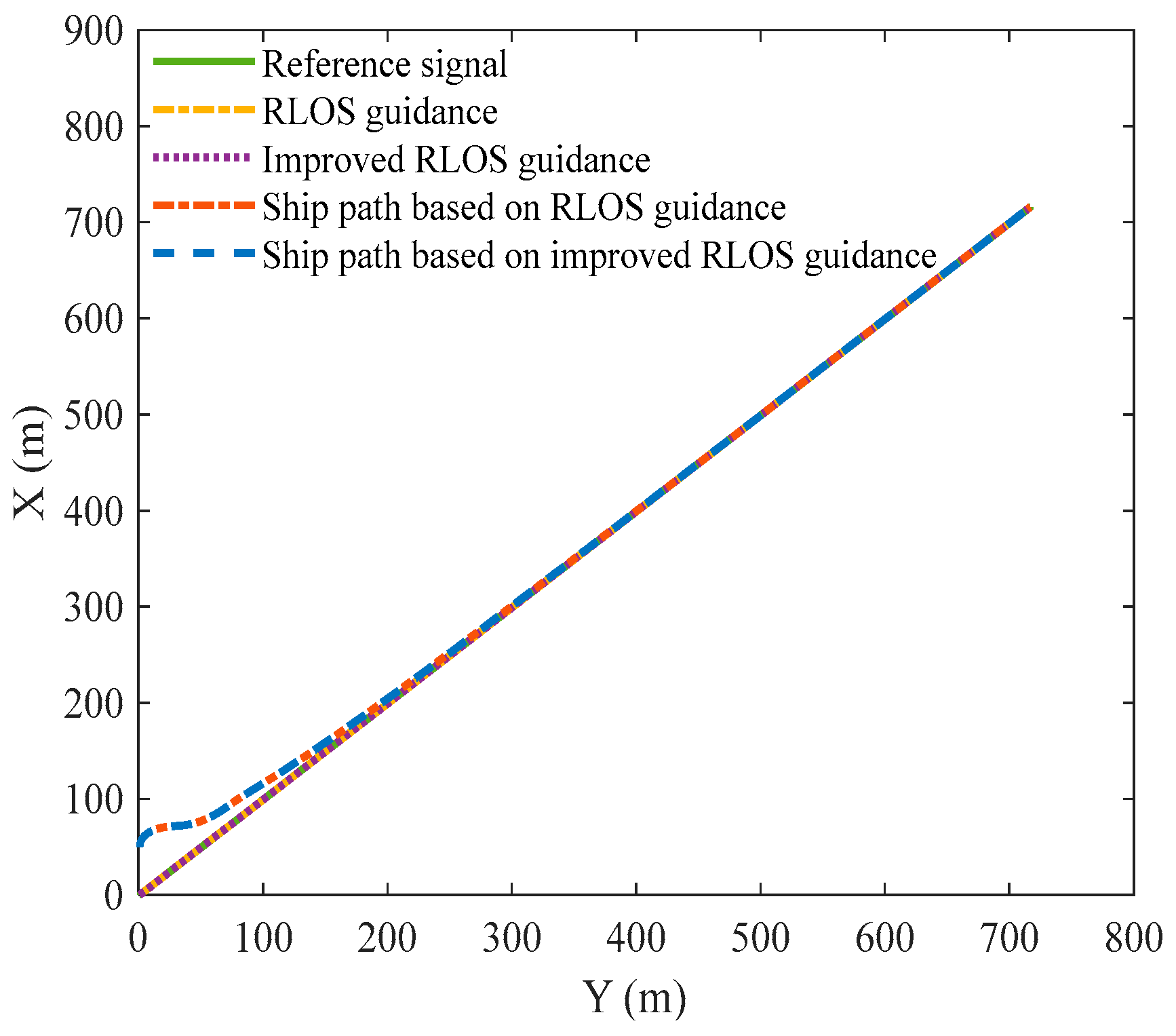
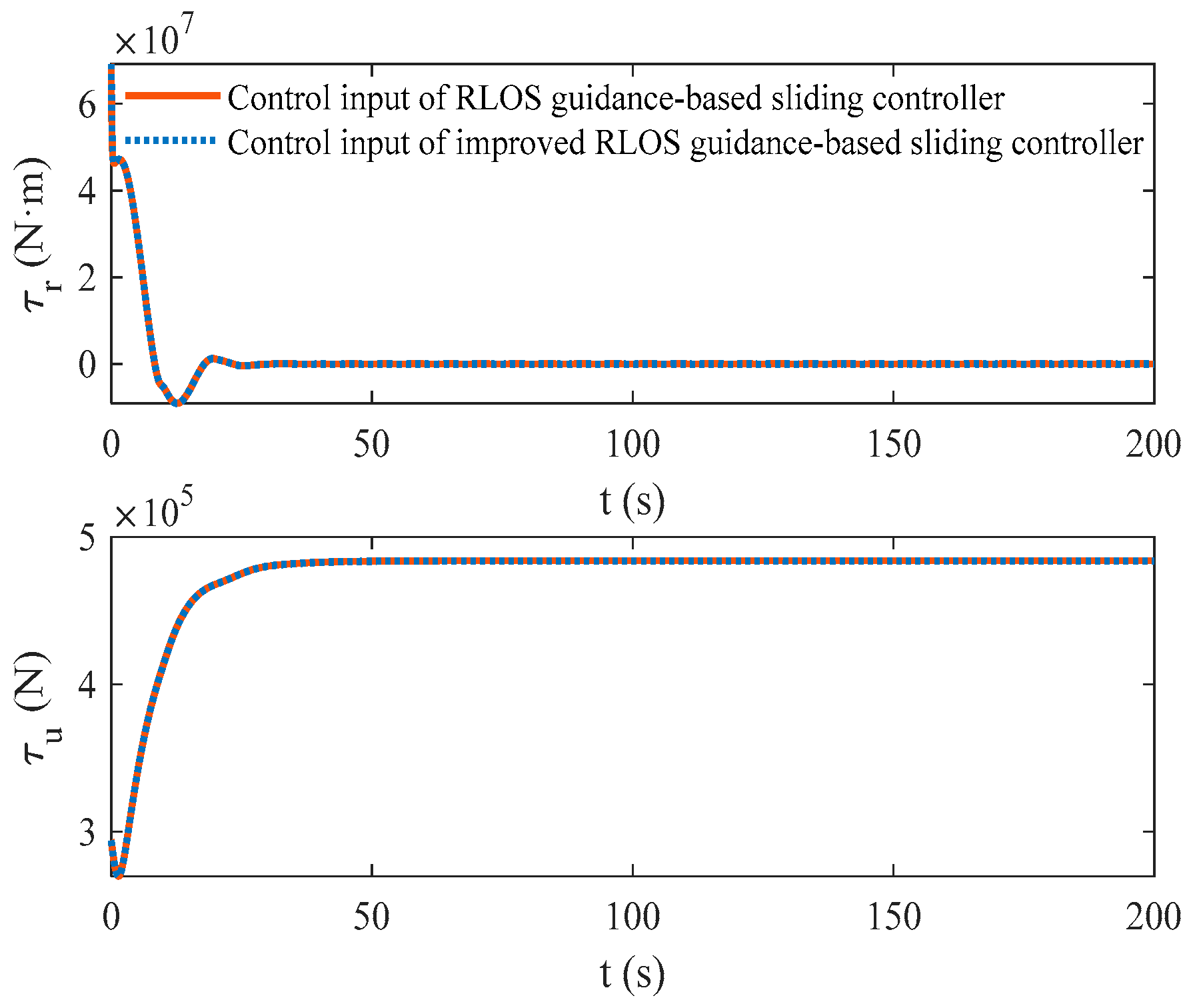
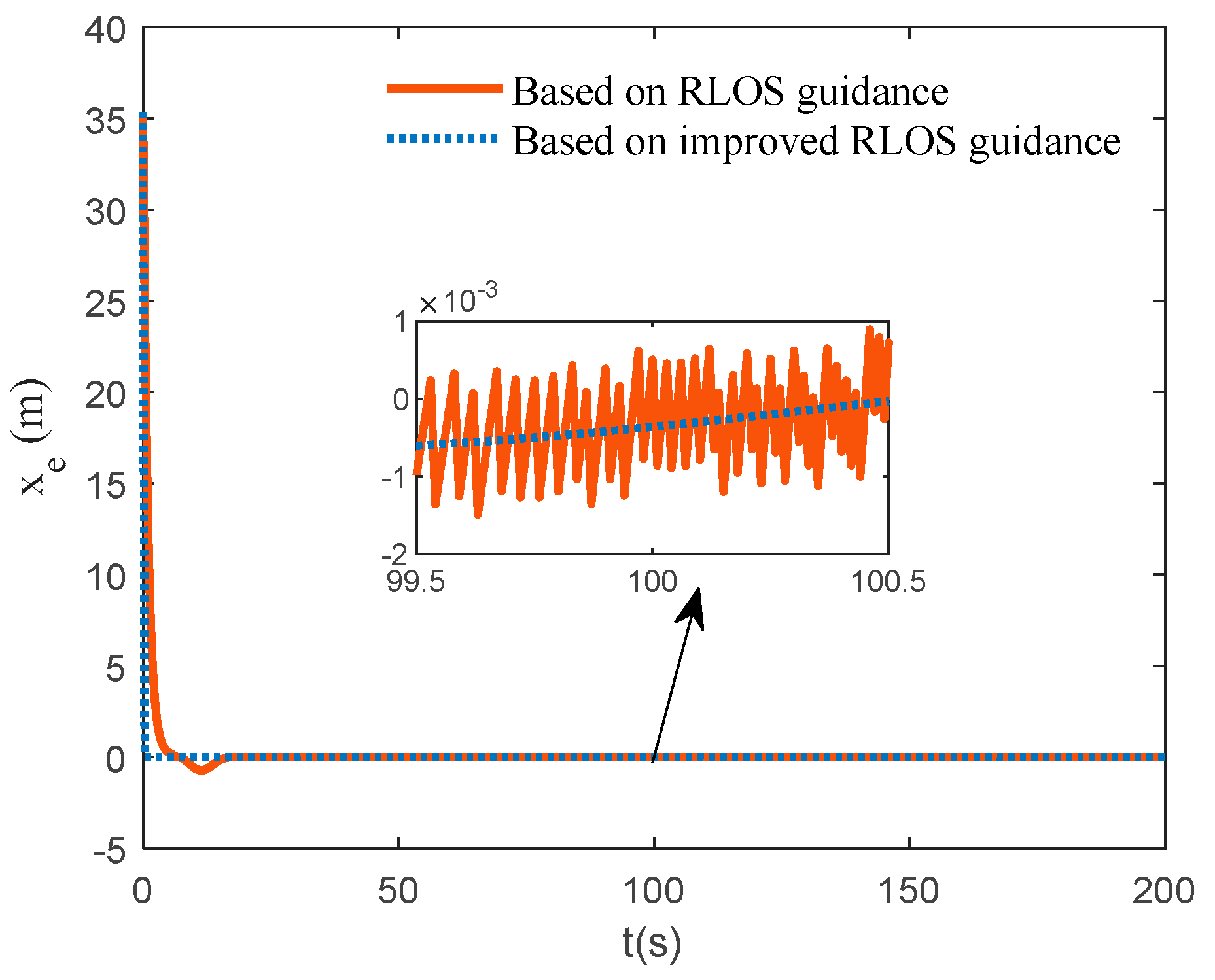
4.2. Comparative Studies between RLOS Guidance and Improved RLOS Guidance
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Walker, T.R.; Adebambo, O.; Feijoo, M.C.D.A.; Elhaimer, E.; Hossain, T.; Edwards, S.J.; Morrison, C.E.; Romo, J.; Sharma, N.; Taylor, S.; et al. Environmental effects of marine transportation. In World Seas: An Environmental Evaluation, 2nd ed.; Academic Press: London, UK, 2019. [Google Scholar]
- Renga, A.; Graziano, M.D.; Moccia, A. Segmentation of marine SAR images by sublook analysis and application to sea traffic monitoring. IEEE Trans. Geosci. Remote Sens. 2019, 57, 1463–1477. [Google Scholar] [CrossRef]
- Kang, C.M.; Yeh, L.C.; Jie, S.Y.R.; Pei, T.J.; Nugroho, H. Design of USV for search and rescue in shallow water. In Proceedings of the 13th International Conference on Intelligent Robotics and Applications, ELECTR Network, Kuala Lampur, Malaysia, 5–7 November 2020; pp. 351–363. [Google Scholar]
- Kula, K.S. Automatic control of ship motion conducting search in open waters. Pol. Marit. Res. 2020, 27, 157–169. [Google Scholar] [CrossRef]
- Mou, J.M.; Hu, T.; Chen, P.F.; Chen, L.Y. Cooperative MASS path planning for marine man overboard search. Ocean Eng. 2021, 235, 109376. [Google Scholar] [CrossRef]
- International Maritime Organization and International Civil Aviation Organization (IMO/ICAO). International Aeronautical and Maritime Search and Rescue Manual; IMO/ICAO: London, UK, 1999. [Google Scholar]
- Choi, J.W.; Curry, R.; Elkaim, G. Path planning based on Bezier curve for autonomous ground vehicles. In Proceedings of the Advances in Electrical and Electronics Engineering-IAENG Special Edition of the World Congress on Engineering and Computer Science 2008, San Francisco, CA, USA, 22–24 October 2008; pp. 158–166. [Google Scholar]
- Miller, A.; Walczak, S. Maritime autonomous surface ship’s path approximation using Bezier curves. Symmetry 2020, 12, 1704. [Google Scholar] [CrossRef]
- McKinley, S.; Levine, M. Cubic spline interpolation. Coll. Redw. 1998, 45, 1049–1060. [Google Scholar]
- Fossen, T.I. Marine Control Systems—Guidance, Navigation, and Control of Ships, Rigs and Underwater Vehicles; Marine Cybernetics: Trondheim, Norway, 2002. [Google Scholar]
- Breivik, M.; Fossen, T.I. Principles of guidance-based path following in 2D and 3D. In Proceedings of the 44th IEEE Conference on Decision and Control, Seville, Spain, 12–15 December 2005; pp. 627–634. [Google Scholar]
- Liu, L.; Wang, D.; Peng, Z.H. Path following of marine surface vehicles with dynamical uncertainty and time-varying ocean disturbances. Neurocomputing 2016, 173, 799–808. [Google Scholar] [CrossRef]
- Liu, L.; Wang, D.; Peng, Z.H. ESO-based line-of-sight guidance law for path following of underactuated marine surface vehicles with exact sideslip compensation. IEEE J. Ocean. Eng. 2017, 42, 477–487. [Google Scholar] [CrossRef]
- Zhang, G.Q.; Zhang, X.K.; Zheng, Y.F. Adaptive neural path-following control for underactuated ships in fields of marine practice. Ocean Eng. 2015, 104, 558–567. [Google Scholar] [CrossRef]
- Shojaei, K. Neural adaptive robust control of underactuated marine surface vehicles with input saturation. Appl. Ocean Res. 2015, 53, 267–278. [Google Scholar] [CrossRef]
- Yu, C.Y.; Liu, C.H.; Lian, L.; Xiang, X.B.; Zeng, Z. ELOS-based path following control for underactuated surface vehicles with actuator dynamics. Ocean Eng. 2019, 187, 106139. [Google Scholar] [CrossRef]
- Liu, C.; Hu, Q.Z.; Sun, T. Distributed formation control of underactuated ships with connectivity preservation and collision avoidance. Ocean Eng. 2022, 263, 112350. [Google Scholar] [CrossRef]
- Liu, C.; Guo, W.L.; Sun, T. RLOS-based path following with event-triggered roll motion control for underactuated ship using rudder. Ocean Eng. 2023, 269, 113592. [Google Scholar] [CrossRef]
- Li, M.C.; Guo, C.; Yu, H.M.; Yuan, Y. Line-of-sight-based global finite-time stable path following control of unmanned surface vehicles with actuator saturation. ISA Trans. 2022, 125, 306–317. [Google Scholar] [CrossRef]
- Do, K.D.; Jiang, Z.P.; Pan, J. Robust adaptive path following of underactuated ships. Automatica 2004, 40, 929–944. [Google Scholar] [CrossRef]
- Su, Y.X.; Wan, L.L.; Zhang, D.H.; Huang, F.R. An improved adaptive integral line-of-sight guidance law for unmanned surface vehicles with uncertainties. Appl. Ocean Res. 2021, 108, 102488. [Google Scholar] [CrossRef]
- Polycarpou, M.M.; Ioannou, P.A. A robust adaptive nonlinear control design. Automatica 1996, 34, 423–427. [Google Scholar] [CrossRef]
- Utkin, V.; Guldner, J.; Shi, J. Sliding Mode Control in Electro-Mechanical Systems, 2nd ed.; CRC Press: Boca Raton, FL, USA, 2017. [Google Scholar]
- Shtessel, Y.; Edwards, C.; Fridman, L.; Levant, A. Sliding Mode Control and Observation; Springer: New York, NY, USA, 2014. [Google Scholar]
- Zhang, Y.; Liu, Y. Guidance-based path following of an underactuated ship based on Event-triggered sliding mode control. J. Mar. Sci. Eng. 2022, 10, 1780. [Google Scholar] [CrossRef]
- Sun, T.; Liu, C.; Wang, X.G. Distributed anti-windup NN-sliding mode formation control of multi-ships with minimum cost. ISA Trans. 2023, 138, 49–62. [Google Scholar] [CrossRef]
- Ren, Y.; Zhang, L.; Huang, W.; Chen, X. Neural Network-Based Adaptive Sigmoid Circular Path-Following Control for Underactuated Unmanned Surface Vessels under Ocean Disturbances. J. Mar. Sci. Eng. 2023, 11, 2160. [Google Scholar] [CrossRef]
- Chen, X.; Liu, Z.; Zhang, J.Q.; Zhou, D.C.; Dong, J. Adaptive sliding-mode path following control system of the underactuated USV under the influence of ocean currents. J. Syst. Eng. Electron. 2018, 29, 1271–1283. [Google Scholar]
- Tong, S.C.; Li, Q.G.; Chai, T.Y. Fuzzy adaptive control for a class of nonlinear systems. Fuzzy Sets Syst. 1999, 101, 31–39. [Google Scholar] [CrossRef]
- Sui, S.; Chen, C.L.P.; Tong, S.C. Fuzzy adaptive finite-time control design for nontriangular stochastic nonlinear systems. IEEE Trans. Fuzzy Syst. 2019, 27, 172–184. [Google Scholar] [CrossRef]
- Deng, Y.J.; Zhang, X.K.; Zhang, G.Q. Fuzzy logic based speed optimization and path following control for sail-assisted ships. Ocean Eng. 2019, 171, 300–310. [Google Scholar]
- Zhang, G.Q.; Li, J.Q.; Liu, C.; Zhang, W.D. A robust fuzzy speed regulator for unmanned sailboat robot via the composite ILOS guidance. Nonlinear Dyn. 2022, 110, 2465–2480. [Google Scholar] [CrossRef]
- Nei, J.; Lin, X.G. Improved adaptive integral line-of-sight guidance law and adaptive fuzzy path following control for underactuated MSV. IAS Trans. 2019, 94, 151–163. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Reference | Advantage | Shortcoming |
|---|---|---|
| [11] | It provides a simple method to handle the path following problem of underactuated ships. | It ignores the influence of the sideslip angel and kinematic uncertainty. |
| [12,21] | An integral term is used to alleviate the influence of the sideslip angel. | It cannot handle the time-varying sideslip angle and ignores the kinematic uncertainty. |
| [13,16] | A reduced-order extended state observer is employed to identify the time-varying sideslip angle. | It ignores the kinematic uncertainty. |
| [18] | A robust term is employed to compensate the kinematic uncertainty. | It ignores the influence of the sideslip angle and exists the chattering effect. |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guo, W.; Liu, C.; Sun, T. Cooperative Maritime Search of Multi-Ship Based on Improved Robust Line-of-Sight Guidance. J. Mar. Sci. Eng. 2024, 12, 105. https://doi.org/10.3390/jmse12010105
Guo W, Liu C, Sun T. Cooperative Maritime Search of Multi-Ship Based on Improved Robust Line-of-Sight Guidance. Journal of Marine Science and Engineering. 2024; 12(1):105. https://doi.org/10.3390/jmse12010105
Chicago/Turabian StyleGuo, Weili, Cheng Liu, and Ting Sun. 2024. "Cooperative Maritime Search of Multi-Ship Based on Improved Robust Line-of-Sight Guidance" Journal of Marine Science and Engineering 12, no. 1: 105. https://doi.org/10.3390/jmse12010105
APA StyleGuo, W., Liu, C., & Sun, T. (2024). Cooperative Maritime Search of Multi-Ship Based on Improved Robust Line-of-Sight Guidance. Journal of Marine Science and Engineering, 12(1), 105. https://doi.org/10.3390/jmse12010105