
An Underwater Triboelectric Biomechanical Energy Harvester to Power the Electronic Tag of Marine Life


 , ,
, ,  , and
, and 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
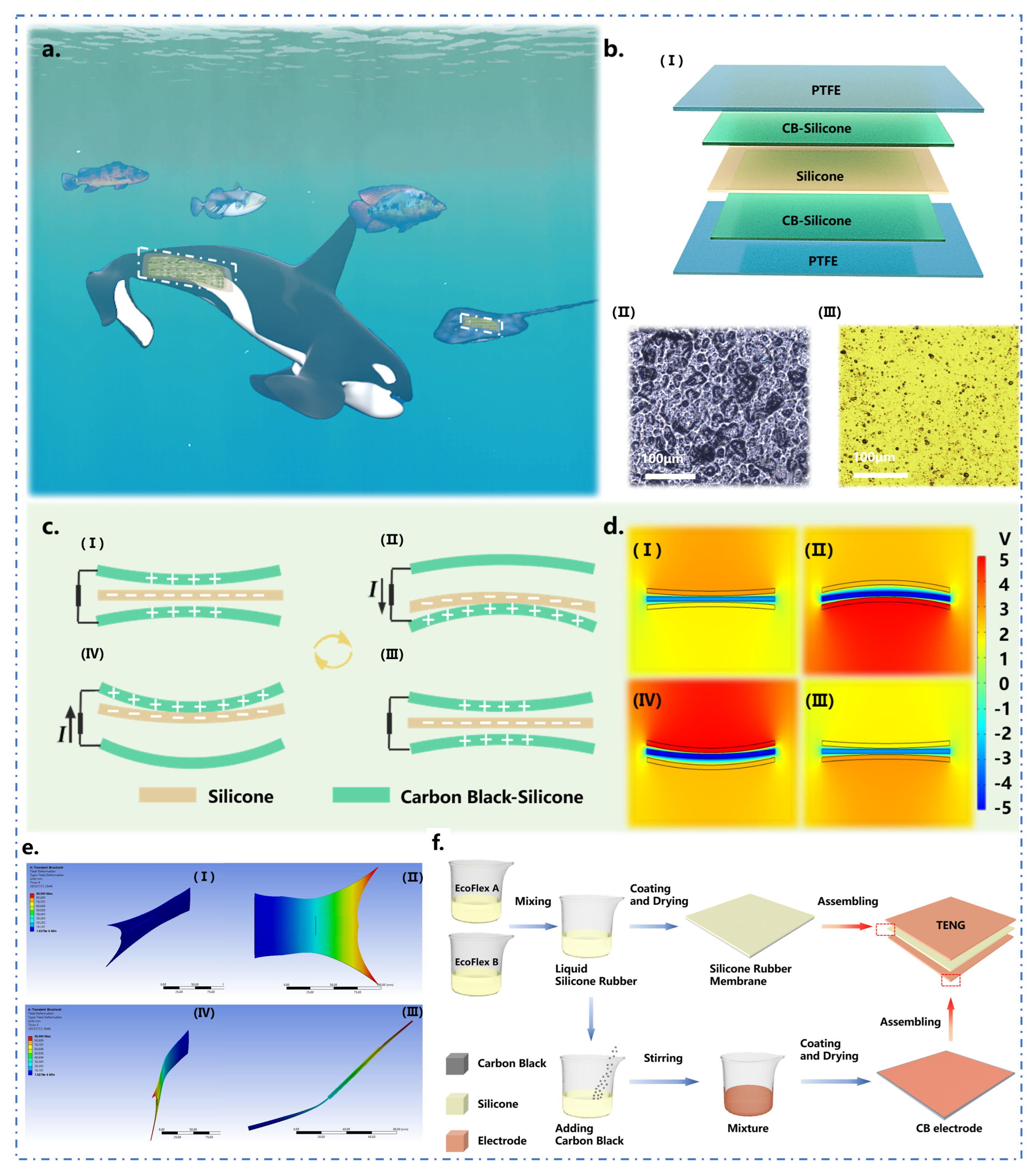
2. Structure and Working Principle
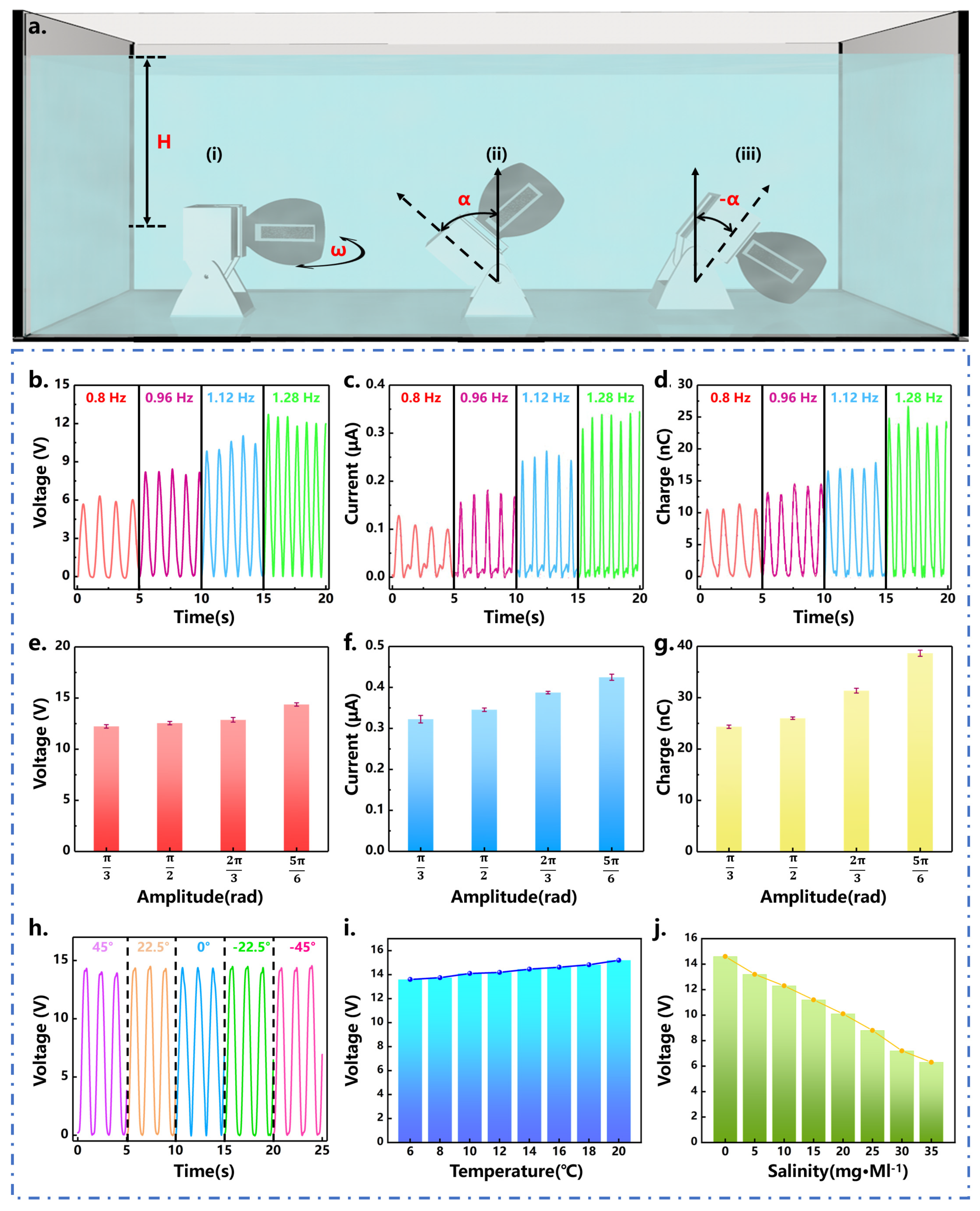
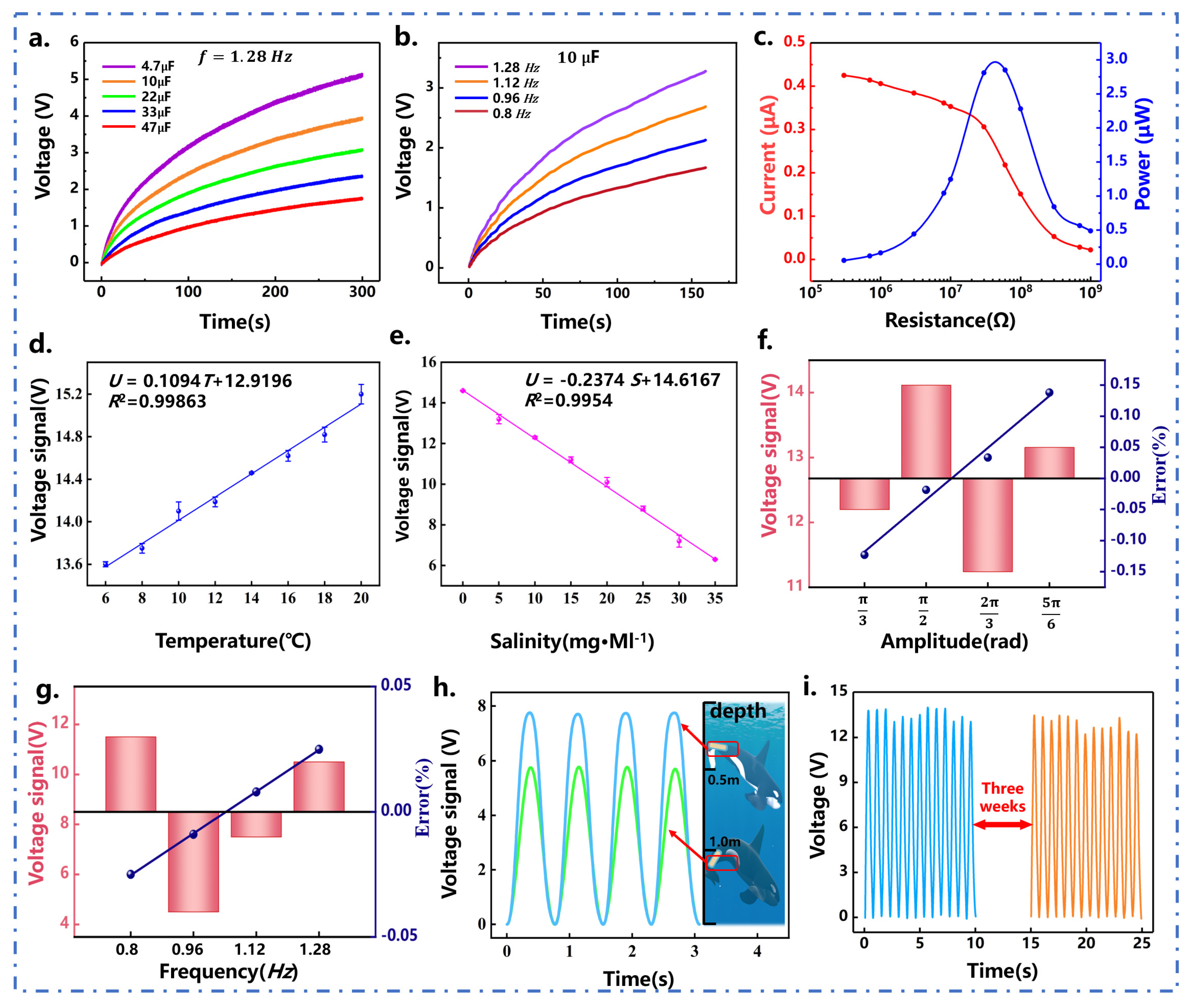
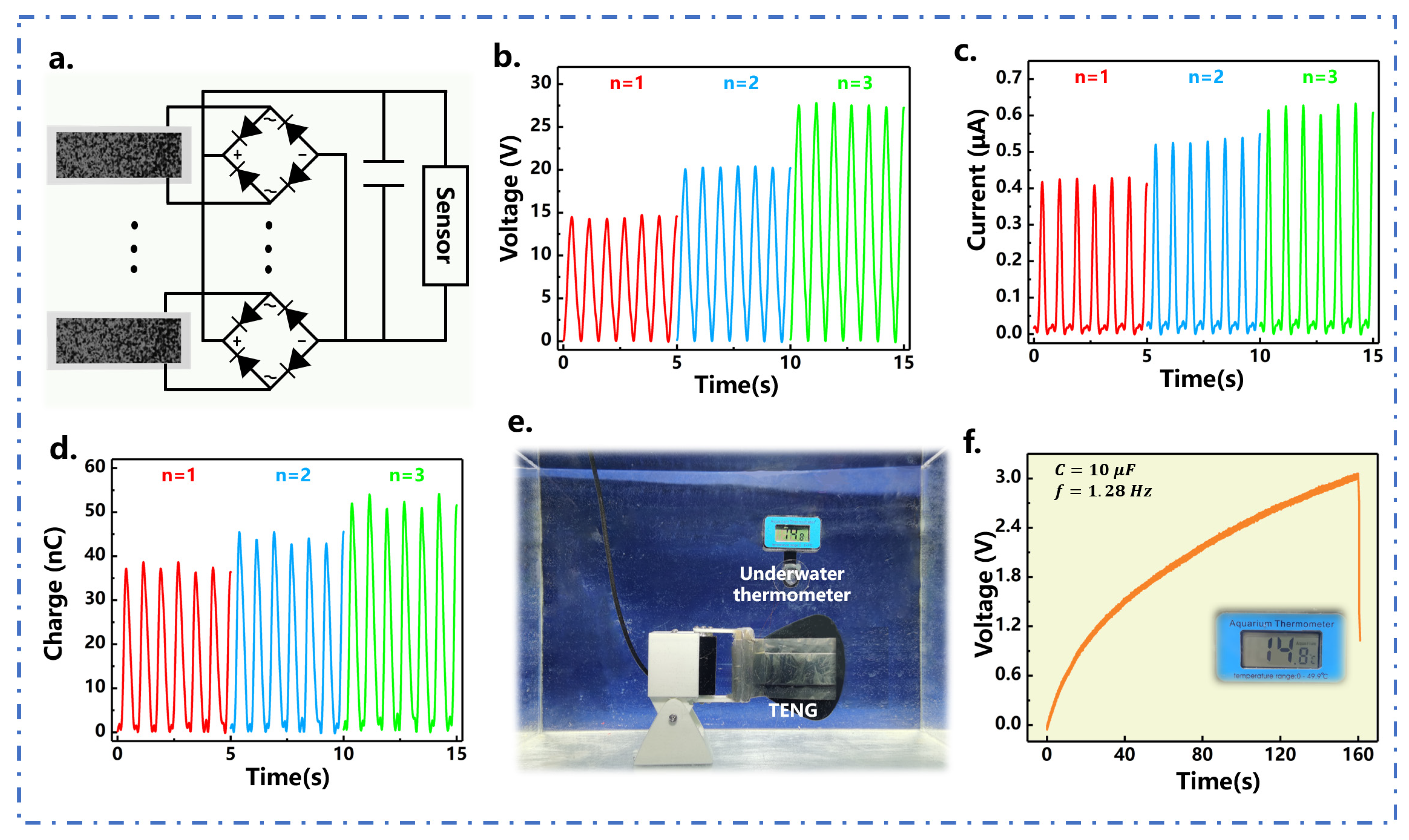
3. Results and Discussion
4. Materials and Methods
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Thorstad, E.B.; Rikardsen, A.H.; Alp, A.; ∅kland, F. The use of electronic tags in fish research–an overview of fish telemetry methods. Turk. J. Fish. Aquat. Sci. 2013, 13, 881–896. [Google Scholar]
- National Research Council. Understanding Marine Biodiversity; National Academies Press: Washington, DC, USA, 1995. [Google Scholar]
- Venkataraman, K.; Raghunathan, C. Coastal and marine biodiversity of India. In Marine Faunal Diversity in India; Elsevier: Amsterdam, The Netherlands, 2015; pp. 303–348. [Google Scholar]
- Sala, E.; Knowlton, N. Global marine biodiversity trends. Annu. Rev. Environ. Resour. 2006, 31, 93–122. [Google Scholar] [CrossRef]
- Grigg, R.W. Effects of sewage discharge, fishing pressure and habitat complexity on coral ecosystems and reef fishes in Hawaii. Mar. Ecol. Prog. Ser. Oldendorf 1994, 103, 25–34. [Google Scholar] [CrossRef]
- Ford, A.K.; Van Hoytema, N.; Moore, B.R.; Pandihau, L.; Wild, C.; Ferse, S.C. High sedimentary oxygen consumption indicates that sewage input from small islands drives benthic community shifts on overfished reefs. Environ. Conserv. 2017, 44, 405–411. [Google Scholar] [CrossRef]
- Marshall, R.C.; Fisher, J.A.; Gatti, P.; Carruthers, E.H.; Robert, D.; Le Bris, A. Combining electronic tag data and fish harvesters’ knowledge to identify ocean management concerns. Mar. Policy 2023, 147, 105393. [Google Scholar] [CrossRef]
- Lundquist, C.J.; Granek, E.F. Strategies for successful marine conservation: Integrating socioeconomic, political, and scientific factors. Conserv. Biol. 2005, 19, 1771–1778. [Google Scholar] [CrossRef]
- Thaxter, C.B.; Ross-Smith, V.H.; Clark, J.A.; Clark, N.A.; Conway, G.J.; Masden, E.A.; Wade, H.M.; Leat, E.H.; Gear, S.C.; Marsh, M.; et al. Contrasting effects of GPS device and harness attachment on adult survival of Lesser Black-backed Gulls Larus fuscus and Great Skuas Stercorarius skua. Ibis 2016, 158, 279–290. [Google Scholar] [CrossRef]
- MacRae, A.M.; Makowska, I.J.; Fraser, D. Initial evaluation of facial expressions and behaviours of harbour seal pups (Phoca vitulina) in response to tagging and microchipping. Appl. Anim. Behav. Sci. 2018, 205, 167–174. [Google Scholar] [CrossRef]
- Hays, G.C.; Rattray, A.; Esteban, N. Addressing tagging location bias to assess space use by marine animals. J. Appl. Ecol. 2020, 57, 1981–1987. [Google Scholar] [CrossRef]
- Hammerschlag, N.; Cooke, S.J.; Gallagher, A.J.; Godley, B.J. Considering the fate of electronic tags: Interactions with stakeholders and user responsibility when encountering tagged aquatic animals. Methods Ecol. Evol. 2014, 5, 1147–1153. [Google Scholar] [CrossRef]
- Bacopoulos, P.; Lambert, J.D.; Hertz, M.; Montoya, L.; Smith, T. Field and model study to define baseline conditions of beached oil tar balls along Florida’s First Coast. J. Mar. Sci. Eng. 2014, 2, 160–170. [Google Scholar] [CrossRef]
- Maniscalco, R.; Forzese, M.; Barbagallo, V.; Borzì, L.; D’Andrea, N.M.; Distefano, S.; Giustolisi, C.; Nádudvari, Á.; Pellegrino, A.G.; Foresi, L.M.; et al. Toward an Astrochronology-Based Age-Model for a Messinian Pre-Evaporitic Succession: The Example of Torrente Vaccarizzo Section in Sicily (Italy). J. Mar. Sci. Eng. 2023, 11, 915. [Google Scholar] [CrossRef]
- Todd Jones, T.; Van Houtan, K.S.; Bostrom, B.L.; Ostafichuk, P.; Mikkelsen, J.; Tezcan, E.; Carey, M.; Imlach, B.; Seminoff, J.A. Calculating the ecological impacts of animal-borne instruments on aquatic organisms. Methods Ecol. Evol. 2013, 4, 1178–1186. [Google Scholar] [CrossRef]
- Cooke, S.J.; Woodley, C.M.; Brad Eppard, M.; Brown, R.S.; Nielsen, J.L. Advancing the surgical implantation of electronic tags in fish: A gap analysis and research agenda based on a review of trends in intracoelomic tagging effects studies. Rev. Fish Biol. Fish. 2011, 21, 127–151. [Google Scholar] [CrossRef]
- Mulcahy, D.M. Antibiotic use during the intracoelomic implantation of electronic tags into fish. Rev. Fish Biol. Fish. 2011, 21, 83–96. [Google Scholar] [CrossRef]
- Block, B.A.; Jonsen, I.D.; Jorgensen, S.J.; Winship, A.J.; Shaffer, S.A.; Bograd, S.J.; Hazen, E.L.; Foley, D.G.; Breed, G.; Harrison, A.L.; et al. Tracking apex marine predator movements in a dynamic ocean. Nature 2011, 475, 86–90. [Google Scholar] [CrossRef]
- Li, H.; Lu, J.; Myjak, M.J.; Liss, S.A.; Brown, R.S.; Tian, C.; Deng, Z.D. An implantable biomechanical energy harvester for animal monitoring devices. Nano Energy 2022, 98, 107290. [Google Scholar] [CrossRef]
- Zeng, L.; Hu, Y.; Lu, C.; Pan, G.; Li, M. Arrhenius Equation-Based Model to Predict Lithium-Ions Batteries’ Performance. J. Mar. Sci. Eng. 2022, 10, 1553. [Google Scholar] [CrossRef]
- Walker, K.A.; Trites, A.W.; Haulena, M.; Weary, D.M. A review of the effects of different marking and tagging techniques on marine mammals. Wildl. Res. 2011, 39, 15–30. [Google Scholar] [CrossRef]
- Magle, S.B.; Hunt, V.M.; Vernon, M.; Crooks, K.R. Urban wildlife research: Past, present, and future. Biol. Conserv. 2012, 155, 23–32. [Google Scholar] [CrossRef]
- Yang, Y.; Lu, J.; Pflugrath, B.D.; Li, H.; Martinez, J.J.; Regmi, S.; Wu, B.; Xiao, J.; Deng, Z.D. Lab-on-a-fish: Wireless, miniaturized, fully integrated, implantable biotelemetric tag for real-time in vivo monitoring of aquatic animals. IEEE Internet Things J. 2021, 9, 10751–10762. [Google Scholar] [CrossRef]
- Fan, F.R.; Tian, Z.Q.; Wang, Z.L. Flexible triboelectric generator. Nano Energy 2012, 1, 328–334. [Google Scholar] [CrossRef]
- Yan, J.; Liu, M.; Jeong, Y.G.; Kang, W.; Li, L.; Zhao, Y.; Deng, N.; Cheng, B.; Yang, G. Performance enhancements in poly (vinylidene fluoride)-based piezoelectric nanogenerators for efficient energy harvesting. Nano Energy 2019, 56, 662–692. [Google Scholar] [CrossRef]
- Sun, J.; Guo, H.; Ribera, J.; Wu, C.; Tu, K.; Binelli, M.; Panzarasa, G.; Schwarze, F.W.; Wang, Z.L.; Burgert, I. Sustainable and biodegradable wood sponge piezoelectric nanogenerator for sensing and energy harvesting applications. ACS Nano 2020, 14, 14665–14674. [Google Scholar] [CrossRef]
- Noll, M.U.; Lentz, L.; von Wagner, U. On the discretization of a bistable cantilever beam with application to energy harvesting. Facta Univ. Ser. Mech. Eng. 2019, 17, 125–139. [Google Scholar] [CrossRef]
- Marinković, D.; Rama, G.; Zehn, M. Abaqus implementation of a corotational piezoelectric 3-node shell element with drilling degree of freedom. Facta Univ. Ser. Mech. Eng. 2019, 17, 269–283. [Google Scholar] [CrossRef]
- Nguyen, X.H.; Nguyen, H.A. Investigation of influences of fabrication tolerances on operational characteristics of piezo-actuated stick-slip micro-drives. Facta Univ. Ser. Mech. Eng. 2022, 20, 109–126. [Google Scholar] [CrossRef]
- Kachapi, S.H.H. Nonlinear vibration response of piezoelectric nanosensor: Influences of surface/interface effects. Facta Univ. Ser. Mech. Eng. 2023, 21, 259–272. [Google Scholar]
- Kim, W.G.; Kim, D.W.; Tcho, I.W.; Kim, J.K.; Kim, M.S.; Choi, Y.K. Triboelectric nanogenerator: Structure, mechanism, and applications. Acs Nano 2021, 15, 258–287. [Google Scholar] [CrossRef]
- Niu, S.; Wang, Z.L. Theoretical systems of triboelectric nanogenerators. Nano Energy 2015, 14, 161–192. [Google Scholar] [CrossRef]
- Cheng, T.; Gao, Q.; Wang, Z.L. The current development and future outlook of triboelectric nanogenerators: A survey of literature. Adv. Mater. Technol. 2019, 4, 1800588. [Google Scholar] [CrossRef]
- So, M.Y.; Xu, B.; Li, Z.; Lai, C.L.; Jiang, C. Flexible corrugated triboelectric nanogenerators for efficient biomechanical energy harvesting and human motion monitoring. Nano Energy 2023, 106, 108033. [Google Scholar] [CrossRef]
- Wang, X.; Liu, J.; Wang, S.; Zheng, J.; Guan, T.; Liu, X.; Wang, T.; Chen, T.; Wang, H.; Xie, G.; et al. A Self-powered Triboelectric Coral-Like Sensor Integrated Buoy for Irregular and Ultra-Low Frequency Ocean Wave Monitoring. Adv. Mater. Technol. 2022, 7, 2101098. [Google Scholar] [CrossRef]
- Wang, H.; Fan, Z.; Zhao, T.; Dong, J.; Wang, S.; Wang, Y.; Xiao, X.; Liu, C.; Pan, X.; Zhao, Y.; et al. Sandwich-like triboelectric nanogenerators integrated self-powered buoy for navigation safety. Nano Energy 2021, 84, 105920. [Google Scholar] [CrossRef]
- Xu, P.; Liu, J.; Liu, X.; Wang, X.; Zheng, J.; Wang, S.; Chen, T.; Wang, H.; Wang, C.; Fu, X.; et al. A bio-inspired and self-powered triboelectric tactile sensor for underwater vehicle perception. NPJ Flex. Electron. 2022, 6, 25. [Google Scholar] [CrossRef]
- Wang, X.; Shi, Y.; Yang, P.; Tao, X.; Li, S.; Lei, R.; Liu, Z.; Wang, Z.L.; Chen, X. Fish-Wearable Data Snooping Platform for Underwater Energy Harvesting and Fish Behavior Monitoring. Small 2022, 18, 2107232. [Google Scholar] [CrossRef]
- Wang, Y.; Liu, X.; Chen, T.; Wang, H.; Zhu, C.; Yu, H.; Song, L.; Pan, X.; Mi, J.; Lee, C.; et al. An underwater flag-like triboelectric nanogenerator for harvesting ocean current energy under extremely low velocity condition. Nano Energy 2021, 90, 106503. [Google Scholar] [CrossRef]
- Du, T.; Dong, F.; Zhu, M.; Xi, Z.; Li, F.; Zou, Y.; Sun, P.; Xu, M. Self-Powered and Robust Marine Exhaust Gas Flow Sensor Based on Bearing Type Triboelectric Nanogenerator. J. Mar. Sci. Eng. 2022, 10, 1416. [Google Scholar] [CrossRef]
- Xiao, X.; Wang, Q.; Yao, B.; Guo, L.; Zhu, C.; Zhao, C.; Liu, L.; Xu, M. Research on Low-Frequency Vibration Monitoring Sensor Based on a Cantilever-Beam-Structured Triboelectric Nanogenerator. J. Mar. Sci. Eng. 2023, 11, 838. [Google Scholar] [CrossRef]
- Feng, S.; Zhong, Z.; Wang, Y.; Xing, W.; Drioli, E. Progress and perspectives in PTFE membrane: Preparation, modification, and applications. J. Membr. Sci. 2018, 549, 332–349. [Google Scholar] [CrossRef]
- Zhou, Q.; Kim, J.N.; Han, K.W.; Oh, S.W.; Umrao, S.; Chae, E.J.; Oh, I.K. Integrated dielectric-electrode layer for triboelectric nanogenerator based on Cu nanowire-Mesh hybrid electrode. Nano Energy 2019, 59, 120–128. [Google Scholar] [CrossRef]
- Bui, V.T.; Oh, J.H.; Kim, J.N.; Zhou, Q.; Oh, I.K. Nest-inspired nanosponge-Cu woven mesh hybrid for ultrastable and high-power triboelectric nanogenerator. Nano Energy 2020, 71, 104561. [Google Scholar] [CrossRef]
- Tavafoghi, M.; Sheikhi, A.; Tutar, R.; Jahangiry, J.; Baidya, A.; Haghniaz, R.; Khademhosseini, A. Engineering tough, injectable, naturally derived, bioadhesive composite hydrogels. Adv. Healthc. Mater. 2020, 9, 1901722. [Google Scholar] [CrossRef] [PubMed]
- Rohling, E.; Foster, G.L.; Grant, K.; Marino, G.; Roberts, A.; Tamisiea, M.E.; Williams, F. Sea-level and deep-sea-temperature variability over the past 5.3 million years. Nature 2014, 508, 477–482. [Google Scholar] [CrossRef]
- Park, S.; Ligaray, M.; Kim, Y.; Chon, K.; Son, M.; Cho, K.H. Investigating the influence of catholyte salinity on seawater battery desalination. Desalination 2021, 506, 115018. [Google Scholar] [CrossRef]

Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, B.; Du, T.; Xu, X.; Liu, J.; Zhu, P.; Guo, L.; Li, Y.; Wang, T.; Zou, Y.; Wang, H.; et al. An Underwater Triboelectric Biomechanical Energy Harvester to Power the Electronic Tag of Marine Life. J. Mar. Sci. Eng. 2023, 11, 1766. https://doi.org/10.3390/jmse11091766
Liu B, Du T, Xu X, Liu J, Zhu P, Guo L, Li Y, Wang T, Zou Y, Wang H, et al. An Underwater Triboelectric Biomechanical Energy Harvester to Power the Electronic Tag of Marine Life. Journal of Marine Science and Engineering. 2023; 11(9):1766. https://doi.org/10.3390/jmse11091766
Chicago/Turabian StyleLiu, Bo, Taili Du, Xiaoyan Xu, Jianhua Liu, Peng Zhu, Linan Guo, Yuanzheng Li, Tianrun Wang, Yongjiu Zou, Hao Wang, and et al. 2023. "An Underwater Triboelectric Biomechanical Energy Harvester to Power the Electronic Tag of Marine Life" Journal of Marine Science and Engineering 11, no. 9: 1766. https://doi.org/10.3390/jmse11091766
APA StyleLiu, B., Du, T., Xu, X., Liu, J., Zhu, P., Guo, L., Li, Y., Wang, T., Zou, Y., Wang, H., Xu, P., Sun, P., & Xu, M. (2023). An Underwater Triboelectric Biomechanical Energy Harvester to Power the Electronic Tag of Marine Life. Journal of Marine Science and Engineering, 11(9), 1766. https://doi.org/10.3390/jmse11091766