
Phase-Resolved Wave Simulation over Isolated Seamount


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
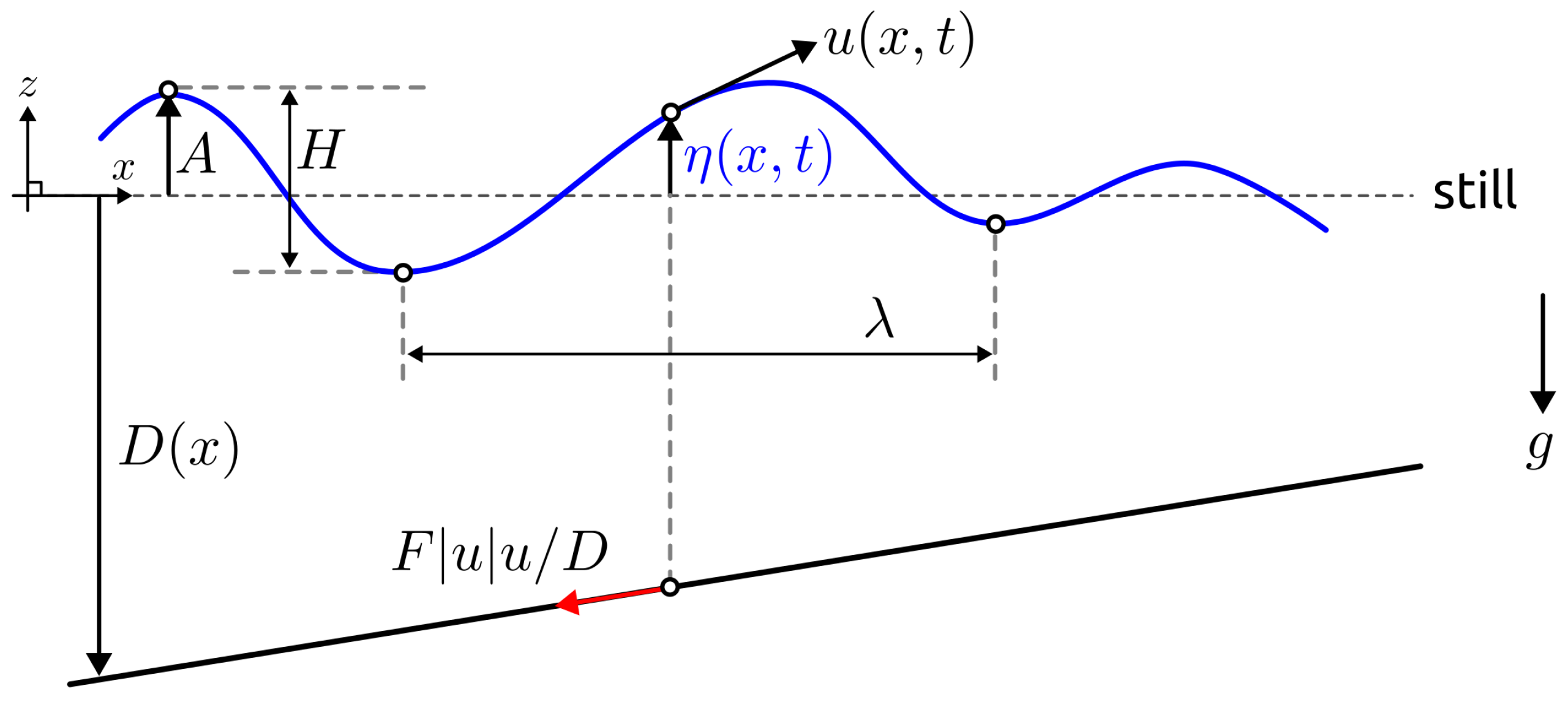
2.1. HAWASSI Model
2.2. Model Validation
3. Case 1: Waves over the Glagah Seamount to the Coast
3.1. Domain and Numerical Setting
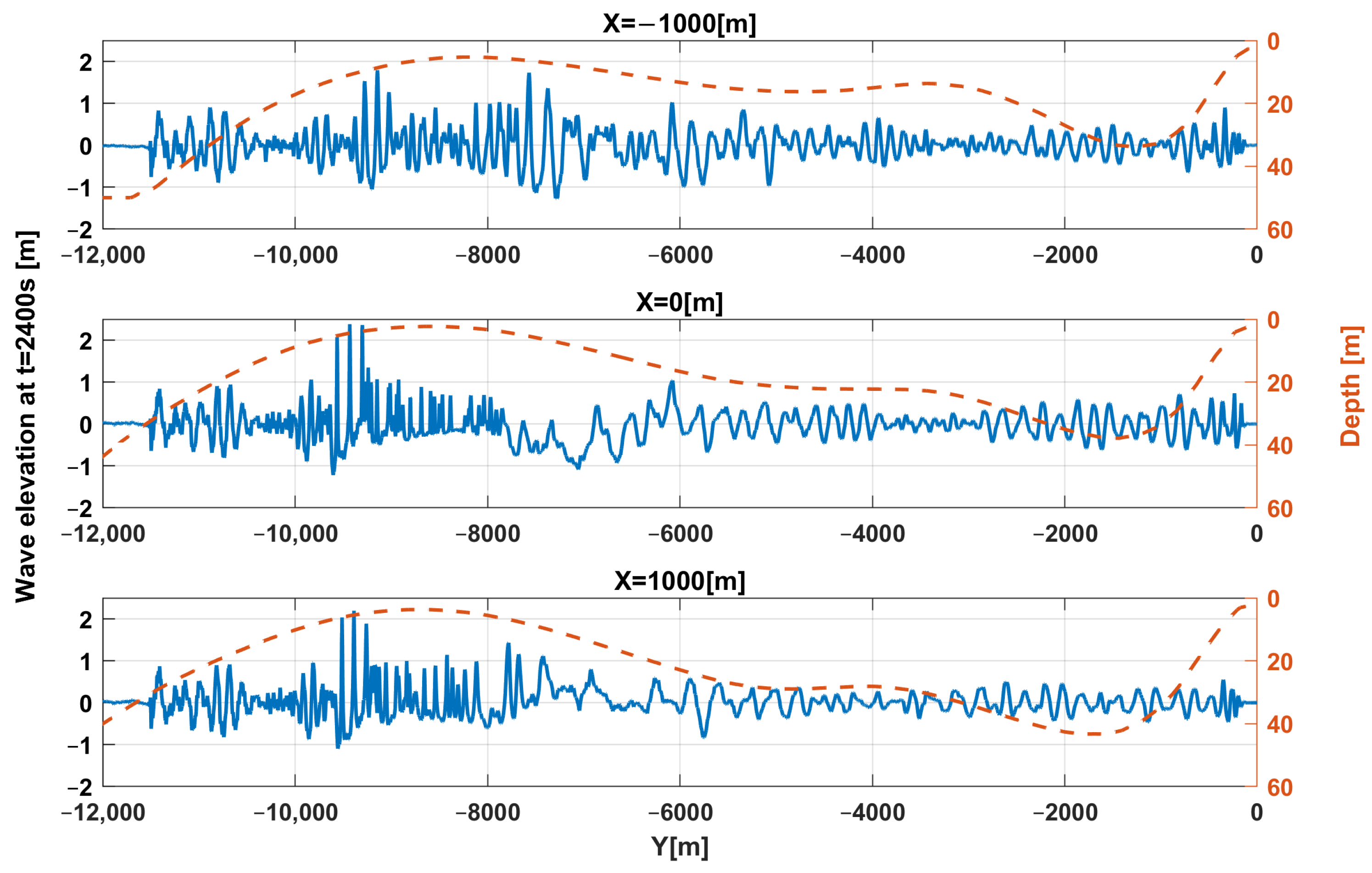
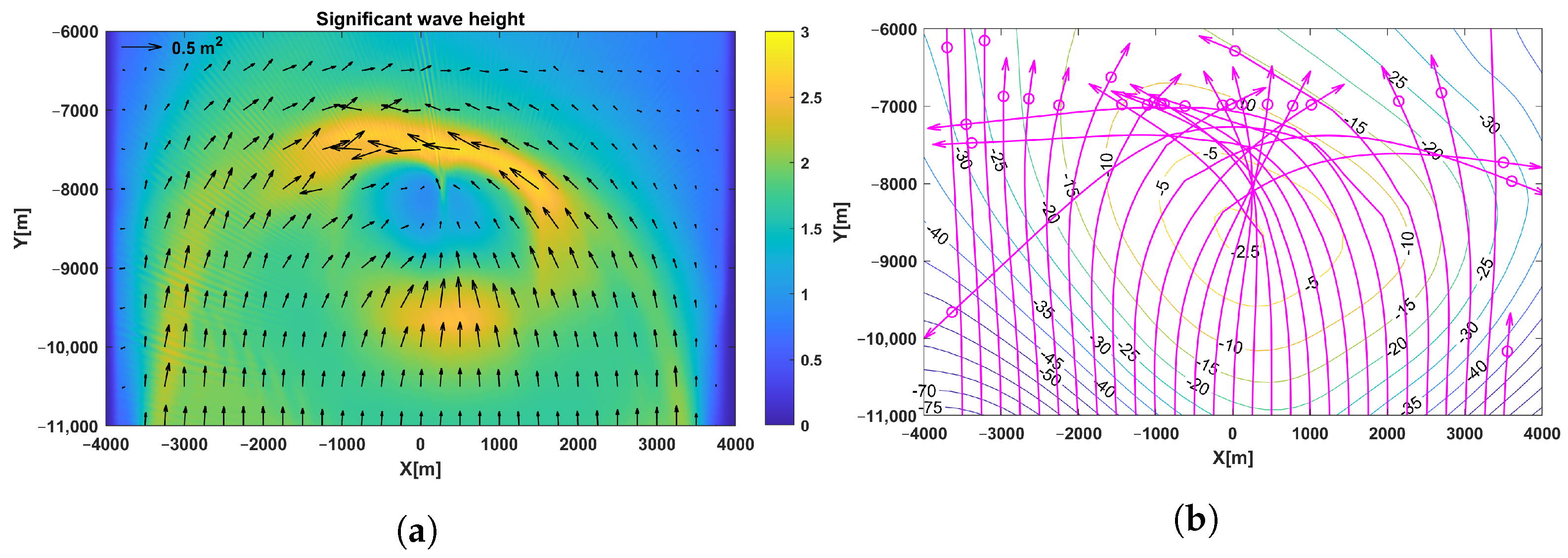
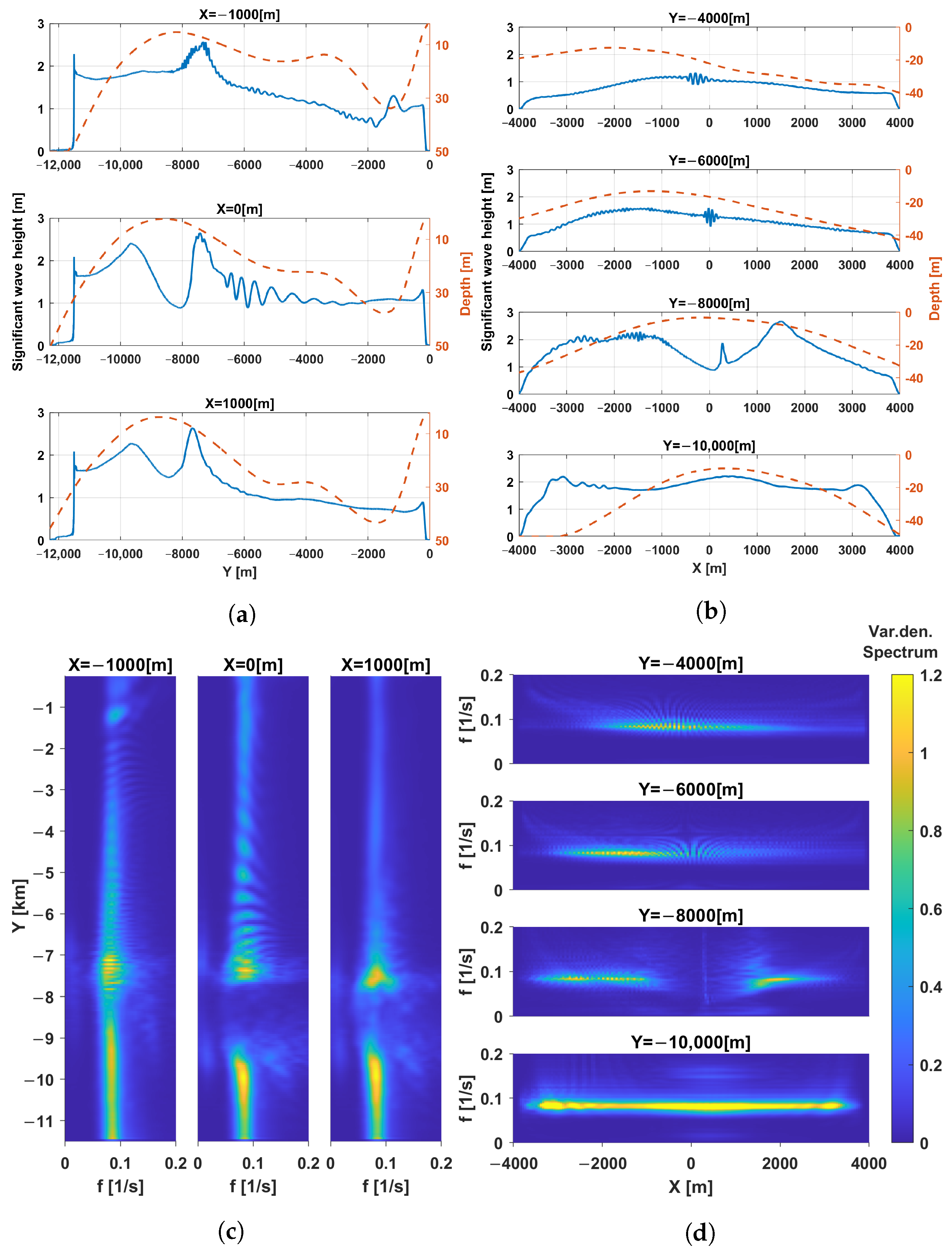
3.2. Wave Elevation
3.3. Main Wave Directions (Wave Rays)
3.4. Wave Spectra
4. Case 2: Waves over the Socotra Rock
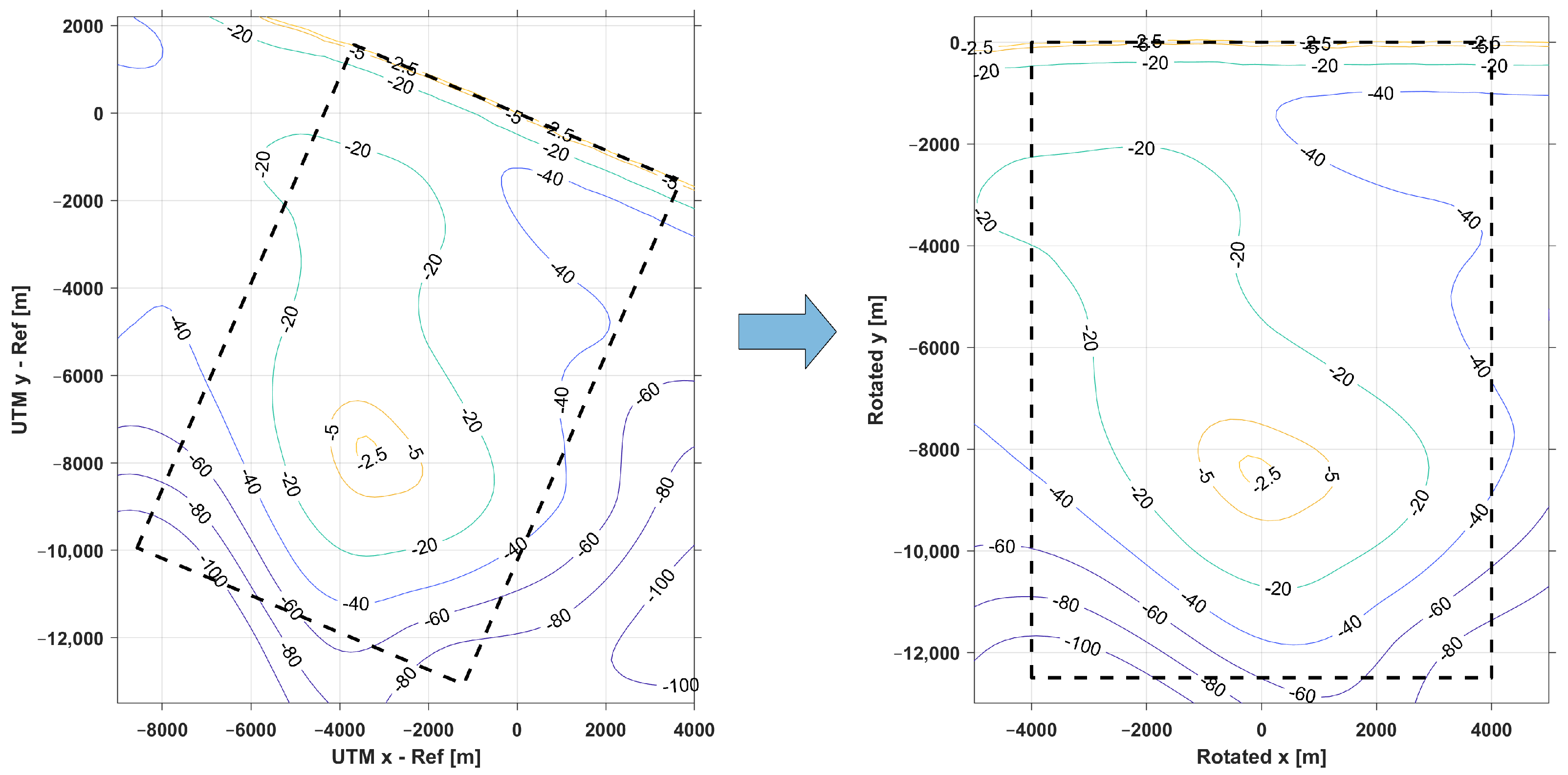
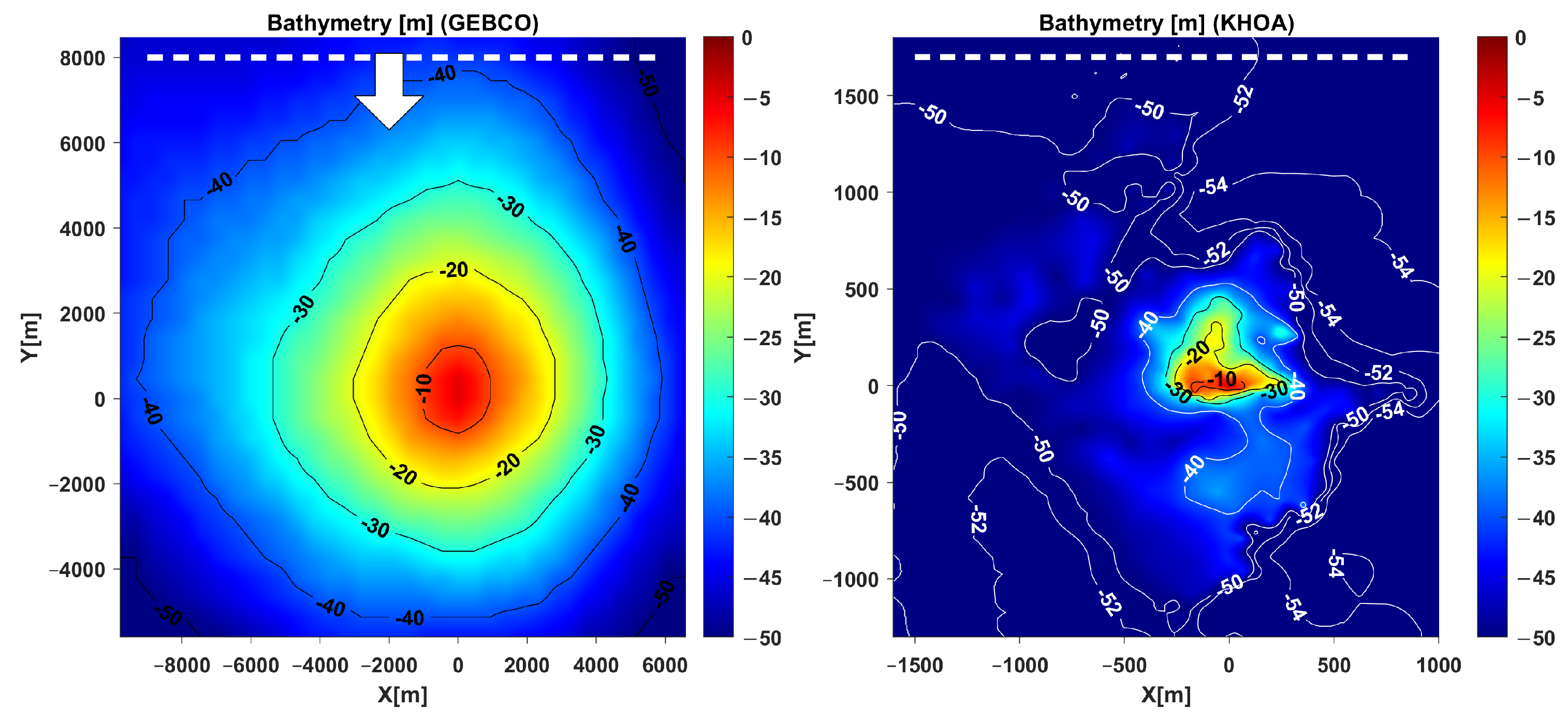
4.1. Domain and Numerical Setting
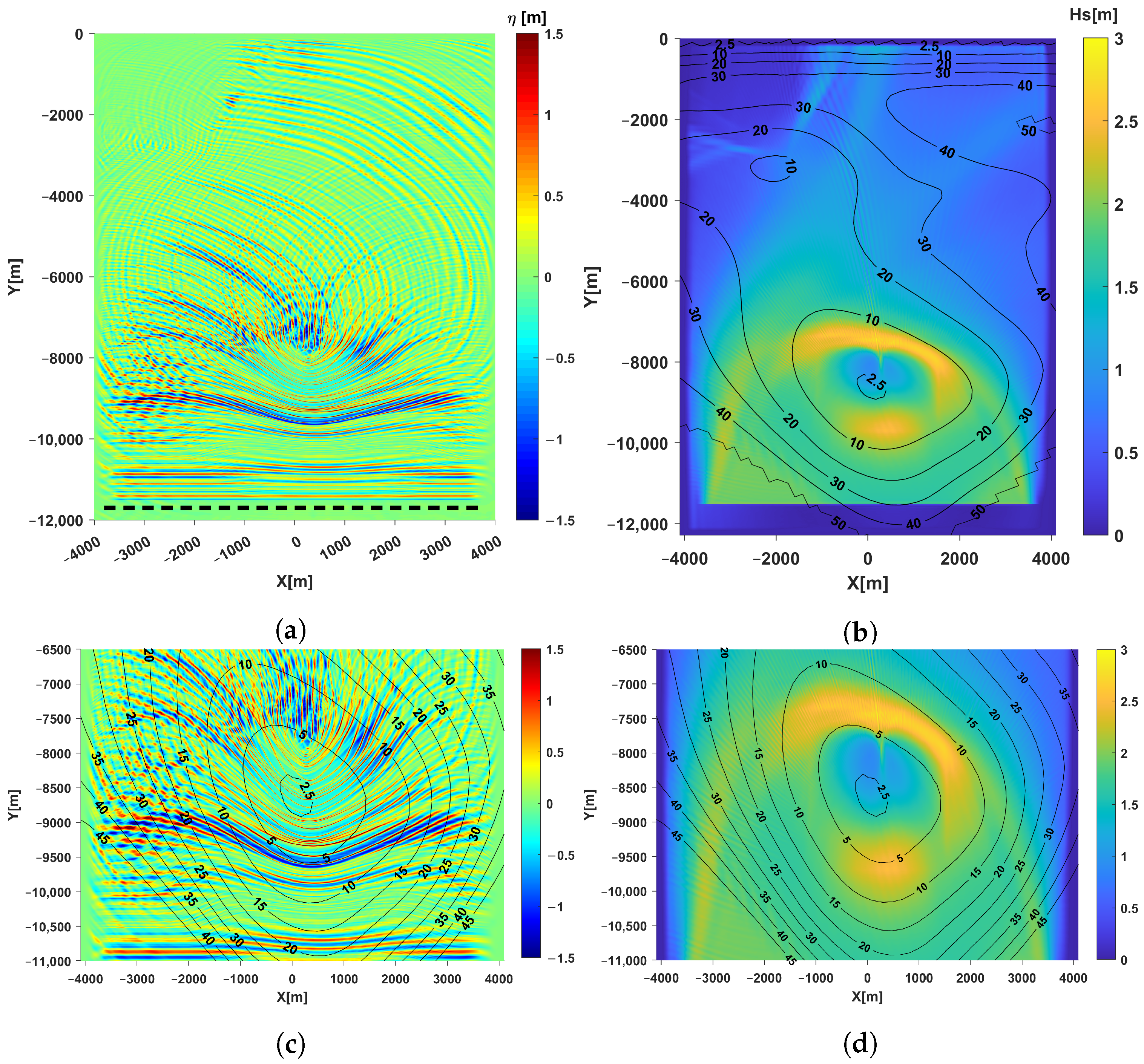
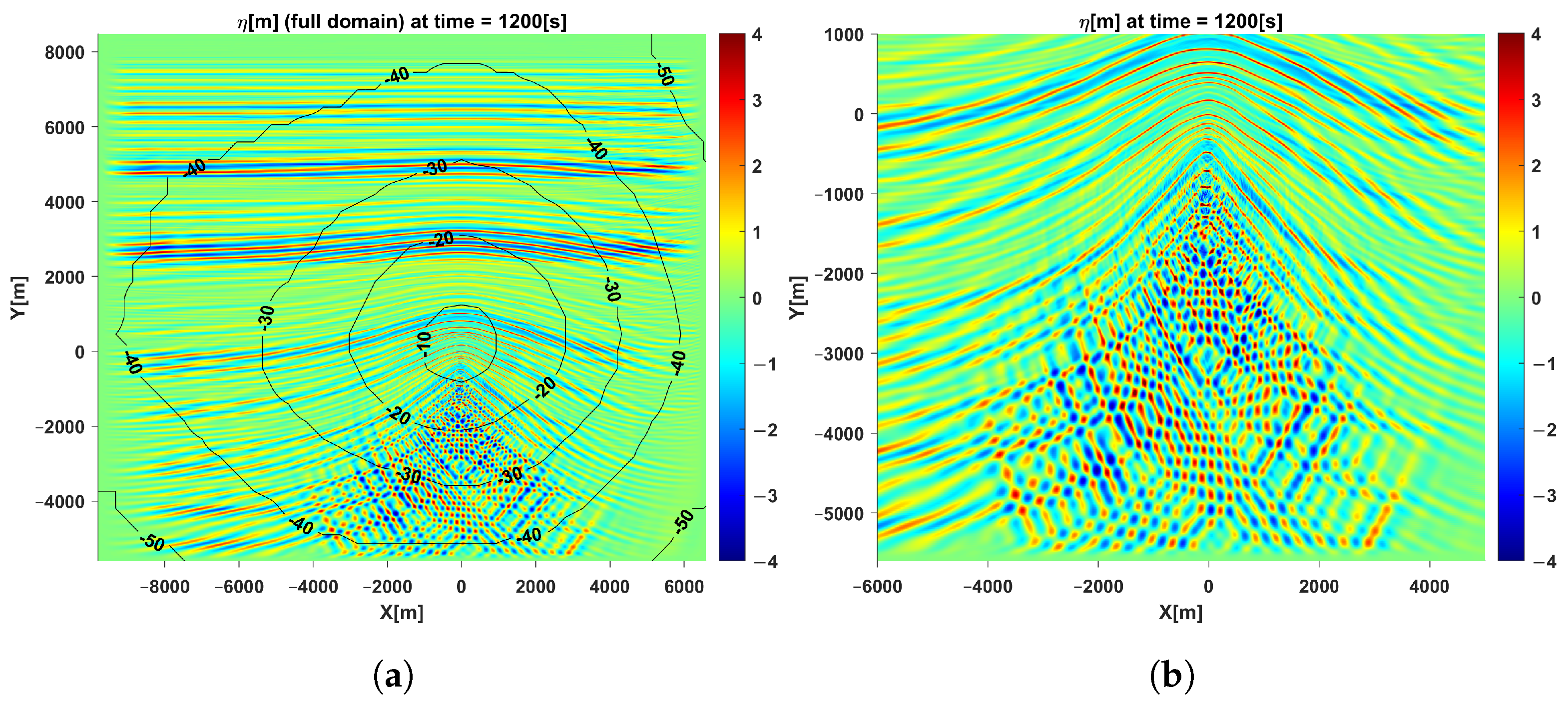
4.2. Waves over the Large Domain (GEBCO)
4.3. Waves around the Rock (KHOA)
5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Nam, S.; Kim, D.J.; Lee, S.W.; Kim, B.G.; Kang, K.M.; Cho, Y.K. Nonlinear internal wave spirals in the northern East China Sea. Sci. Rep. 2018, 8, 3473. [Google Scholar] [CrossRef]
- Kim, S.-S.; Wessel, P. New global seamount census from altimetry-derived gravity data. Geophys. J. Int. 2011, 186, 615–631. [Google Scholar] [CrossRef]
- Sosa, J.; Cavaleri, L.; Portilla-Yandún, J. On the interaction between ocean surface waves and seamounts. Ocean Dyn. 2017, 67, 1553–1565. [Google Scholar] [CrossRef]
- Brink, K.H. A Comparison of Long Coastal Trapped Wave Theory with Observations off Peru. J. Phys. Oceanogr. 1982, 12, 897–913. [Google Scholar] [CrossRef]
- Brink, K. The effect of stratification on seamount-trapped waves. Deep Sea Res. Part A Oceanogr. Res. Pap. 1989, 36, 825–844. [Google Scholar] [CrossRef]
- Niu, X.; Yu, X. Analytic solution of long wave propagation over a submerged hump. Coast. Eng. 2011, 58, 143–150. [Google Scholar] [CrossRef]
- Haidvogel, D.B.; Beckmann, A.; Chapman, D.C.; Lin, R.Q. Numerical Simulation of Flow around a Tall Isolated Seamount. Part II: Resonant Generation of Trapped Waves. J. Phys. Oceanogr. 1993, 23, 2373–2391. [Google Scholar] [CrossRef]
- Stashchuk, N.; Vlasenko, V. Internal Wave Dynamics Over Isolated Seamount and Its Influence on Coral Larvae Dispersion. Front. Mar. Sci. 2021, 8, 735358. [Google Scholar] [CrossRef]
- Zhang, L.; Buijsman, M.C.; Comino, E.; Swinney, H.L. Internal wave generation by tidal flow over periodically and randomly distributed seamounts. J. Geophys. Res. Ocean. 2017, 122, 5063–5074. [Google Scholar] [CrossRef]
- Chapman, D.C.; Haidvogel, D.B. Formation of Taylor caps over a tall isolated seamount in a stratified ocean. Geophys. Astrophys. Fluid Dyn. 1992, 64, 31–65. [Google Scholar] [CrossRef]
- Perfect, B.; Kumar, N.; Riley, J.J. Vortex Structures in the Wake of an Idealized Seamount in Rotating, Stratified Flow. Geophys. Res. Lett. 2018, 45, 9098–9105. [Google Scholar] [CrossRef]
- Perfect, B.; Kumar, N.; Riley, J.J. Energetics of Seamount Wakes. Part I: Energy Exchange. J. Phys. Oceanogr. 2020, 50, 1365–1382. [Google Scholar] [CrossRef]
- Biolchi, L.G.; Farina, L.; Perotto, H. The influence of seamounts on ocean surface wave propagation in Northeast Brazil. Deep Sea Res. Part I Oceanogr. Res. Pap. 2020, 156, 103185. [Google Scholar] [CrossRef]
- Thomas, T.J.; Dwarakish, G. Numerical Wave Modelling—A Review. Aquat. Procedia 2015, 4, 443–448. [Google Scholar] [CrossRef]
- Fergstad, D.; Økland, O.; Stefanakos, C.; Stansberg, C.T.; Croonenborghs, E.; Eliassen, L.; Eidnes, G. LFCS Review Report—Environmental Conditions; Technical Report; SINTEF Ocean: Trondheim, Norway, 2018. [Google Scholar]
- Wang, W.; Pákozdi, C.; Kamath, A.; Bihs, H. Fully nonlinear phase-resolved wave modelling in the Norwegian fjords for floating bridges along the E39 coastal highway. J. Ocean Eng. Mar. Energy 2023, 9, 567–586. [Google Scholar] [CrossRef]
- Buckley, M.; Lowe, R.; Hansen, J. Evaluation of nearshore wave models in steep reef environments. Ocean Dyn. 2014, 64, 847–862. [Google Scholar] [CrossRef]
- Junwoo, C. Numerical Simulations of Rip Currents Under Phase-Resolved Directional Random Wave Conditions. J. Korean Soc. Coast. Ocean Eng. 2015, 27, 238–245. [Google Scholar] [CrossRef]
- Henderson, C.S.; Fiedler, J.W.; Merrifield, M.A.; Guza, R.; Young, A.P. Phase resolving runup and overtopping field validation of SWASH. Coast. Eng. 2022, 175, 104128. [Google Scholar] [CrossRef]
- Nguyen, Q.T.; Mao, M.; Xia, M. Numerical Modeling of Nearshore Wave Transformation and Breaking Processes in the Yellow River Delta with FUNWAVE-TVD Wave Model. J. Mar. Sci. Eng. 2023, 11, 1380. [Google Scholar] [CrossRef]
- Zakharov, V.E. Stability of periodic waves of finite amplitude on the surface of a deep fluid. J. Appl. Mech. Tech. Phys. 1972, 9, 190–194. [Google Scholar] [CrossRef]
- Broer, L.J.F. On the hamiltonian theory of surface waves. Appl. Sci. Res. 1974, 29, 430–446. [Google Scholar] [CrossRef]
- Kurnia, R.; van Groesen, E. High order Hamiltonian water wave models with wave-breaking mechanism. Coast. Eng. 2014, 93, 55–70. [Google Scholar] [CrossRef]
- van Groesen, E.; van der Kroon, I. Fully dispersive dynamic models for surface water waves above varying bottom, Part 2: Hybrid spatial-spectral implementations. Wave Motion 2012, 49, 198–211. [Google Scholar] [CrossRef]
- She Liam, L.; Adytia, D.; van Groesen, E. Embedded wave generation for dispersive surface wave models. Ocean Eng. 2014, 80, 73–83. [Google Scholar] [CrossRef]
- Bühler, O.; Jacobson, T.E. Wave-driven currents and vortex dynamics on barred beaches. J. Fluid Mech. 2001, 449, 313–339. [Google Scholar] [CrossRef]
- Kennedy, A.B.; Chen, Q.; Kirby, J.T.; Dalrymple, R.A. Boussinesq Modeling of Wave Transformation, Breaking, and Runup. I: 1D. J. Waterw. Port Coast. Ocean Eng. 2000, 126, 39–47. [Google Scholar] [CrossRef]
- Kurnia, R.; van Groesen, E. Spatial-spectral Hamiltonian Boussinesq wave simulations. In Advances in Computational and Experimental Marine Hydrodynamics (ACEMH 2014); IIT Madras: Chennai, India, 2014. [Google Scholar]
- Kurnia, R.; van den Munckhof, T.; Poot, C.P.; Naaijen, P.; Huijsmans, R.H.M.; van Groesen, E. Simulations for Design and Reconstruction of Breaking Waves in a Wavetank. In Proceedings of the ASME 2015 34th International Conference on Ocean, Offshore and Arctic Engineering, St. John’s, NL, Canada, 31 May–5 June 2015; Volume 1. [Google Scholar] [CrossRef]
- Kurnia, R.; van Groesen, E. Localization for spatial–spectral implementations of 1D Analytic Boussinesq equations. Wave Motion 2017, 72, 113–132. [Google Scholar] [CrossRef]
- Latifah, A.L.; Handri, D.; Shabrina, A.; Hariyanto, H.; van Groesen, E. Statistics of Simulated Storm Waves over Bathymetry. J. Mar. Sci. Eng. 2021, 9, 784. [Google Scholar] [CrossRef]
- Kurnia, R.; Badriana, M.R.; van Groesen, E. Hamiltonian Boussinesq Simulations for Waves Entering a Harbor with Access Channel. J. Waterw. Port Coast. Ocean Eng. 2018, 144, 04017047. [Google Scholar] [CrossRef]
- Kurnia, R.; Turnip, P.; van Groesen, E. Spectral AB Simulations for Coastal and Ocean Engineering Applications. In Proceedings of the Fourth International Conference in Ocean Engineering (ICOE2018); Murali, K., Sriram, V., Samad, A., Saha, N., Eds.; Springer: Singapore, 2019; pp. 207–217. [Google Scholar]
- van Groesen, E.; Andonowati. Hamiltonian Boussinesq formulation of wave–ship interactions. Appl. Math. Model. 2017, 42, 133–144. [Google Scholar] [CrossRef]
- Bouscasse, B.; Ducrozet, G.; Kim, J.W.; Lim, H.; Choi, Y.M.; Bockman, A.; Pakozdi, C.; Croonenborghs, E.; Bihs, H. Development of a Protocol to Couple Wave and CFD Solvers Towards Reproducible CFD Modeling Practices for Offshore Applications. In Proceedings of the ASME 2020 39th International Conference on Ocean, Offshore and Arctic Engineering, Virtual, 3–7 August 2020. [Google Scholar]
- Kim, J.; Jang, H.; Lim, H.J.; Lai, L.; Latifah, A.; Auburtin, E.; Tcherniguin, N.; Petrie, F. Numerical Ocean Wave-Basin (NOW): A Numerical Solution for FSRU Mooring Design Analysis. In Proceedings of the ASME 2021 40th International Conference on Ocean, Offshore and Arctic Engineering, Virtual, 21–30 June 2021; Volume 1, p. V001T01A034. [Google Scholar] [CrossRef]
- Fouques, S.; Croonenborghs, E.; Koop, A.; Lim, H.J.; Kim, J.; Zhao, B.; Canard, M.; Ducrozet, G.; Bouscasse, B.; Wang, W.; et al. Qualification Criteria for the Verification of Numerical Waves—Part 1: Potential-Based Numerical Wave Tank (PNWT). In Proceedings of the SME 2021 40th International Conference on Ocean, Offshore and Arctic Engineering, Virtual, 21–30 June 2021. [Google Scholar]
- Waltham, D.A. Two-point ray tracing using Fermat’s principle. Geophys. J. 1988, 93, 575–582. [Google Scholar] [CrossRef]
- Kim, B.-N.; Jung, S.-K.; Choi, B.K.; Km, B.-C.; Shim, J. Long-term observation of underwater ambient noise at the Ieodo Ocean Research Station in Korea. In Proceedings of the 2015 IEEE Underwater Technology (UT), Chennai, India, 23–25 February 2015; pp. 1–3. [Google Scholar] [CrossRef]
- Latifah, A.; Shabrina, A.; Handri, D. Simulations of long-crested wind waves over the shallow seamount at Glagah. Appl. Ocean Res. 2022, 129, 103366. [Google Scholar] [CrossRef]
- Ponce de León, S.; Bettencourt, J.; Kjerstad, N. Simulation of irregular waves in an offshore wind farm with a spectral wave model. Cont. Shelf Res. 2011, 31, 1541–1557. [Google Scholar] [CrossRef]
- Humeniuk, J.F.; de León, S.P.; Violante-Carvalho, N.; de Carvalho, L.M.; Soares, C.G. Sheltering effect of islands on the Pacific swell. In Developments in Maritime Transportation and Exploitation of Sea Resources; CRC Press: London, UK, 2013. [Google Scholar]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Latifah, A.L.; Hariyanto, H.L.; Handri, D.; van Groesen, E. Phase-Resolved Wave Simulation over Isolated Seamount. J. Mar. Sci. Eng. 2023, 11, 1765. https://doi.org/10.3390/jmse11091765
Latifah AL, Hariyanto HL, Handri D, van Groesen E. Phase-Resolved Wave Simulation over Isolated Seamount. Journal of Marine Science and Engineering. 2023; 11(9):1765. https://doi.org/10.3390/jmse11091765
Chicago/Turabian StyleLatifah, Arnida L., Henokh Lugo Hariyanto, Durra Handri, and E. van Groesen. 2023. "Phase-Resolved Wave Simulation over Isolated Seamount" Journal of Marine Science and Engineering 11, no. 9: 1765. https://doi.org/10.3390/jmse11091765
APA StyleLatifah, A. L., Hariyanto, H. L., Handri, D., & van Groesen, E. (2023). Phase-Resolved Wave Simulation over Isolated Seamount. Journal of Marine Science and Engineering, 11(9), 1765. https://doi.org/10.3390/jmse11091765