
Ship Autonomous Berthing Simulation Based on Covariance Matrix Adaptation Evolution Strategy


Abstract
:1. Introduction
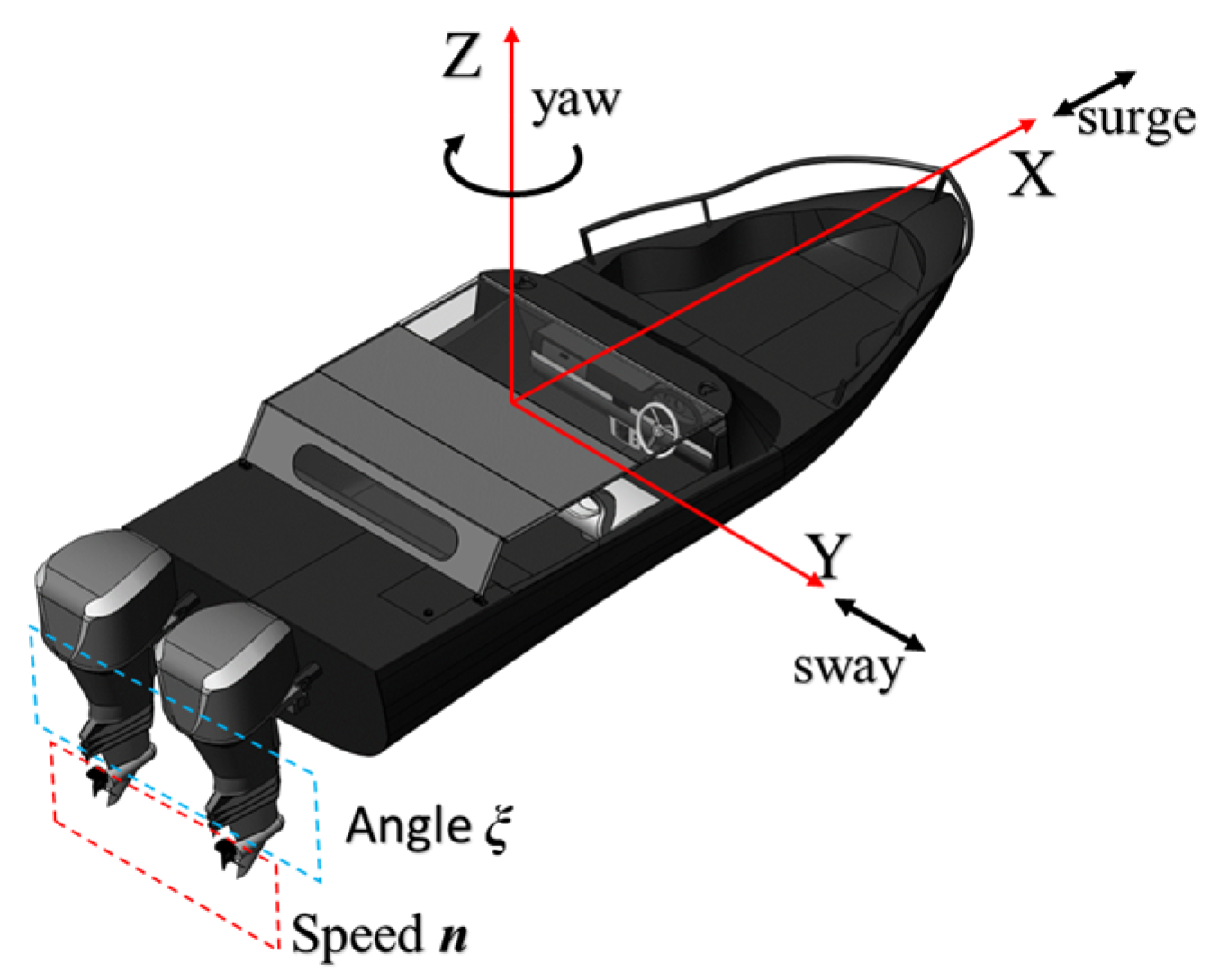
2. Ship Kinematics Model
3. Mathematical Modeling
3.1. LQR Control Model
3.2. CMA-ES Algorithm
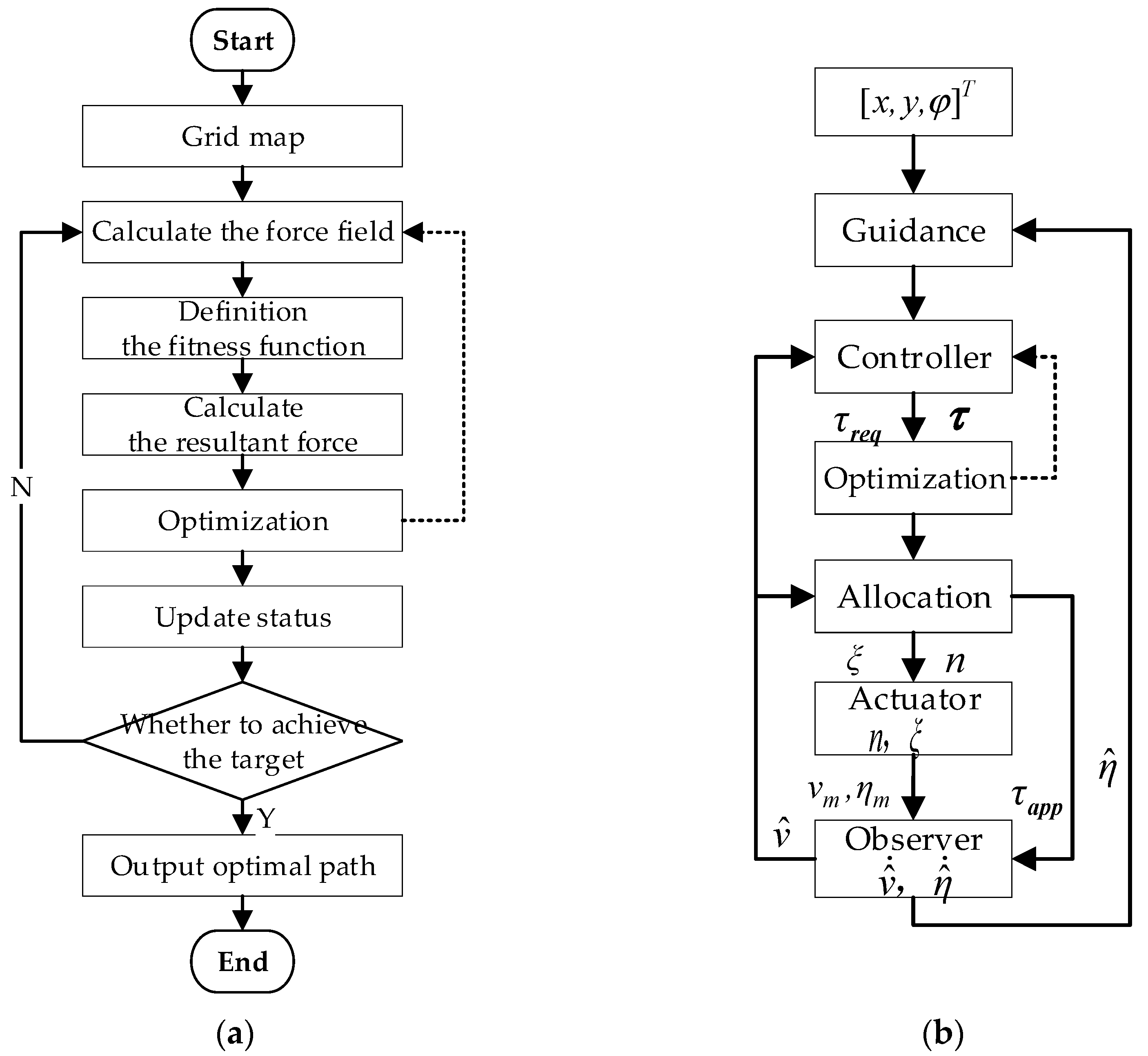
3.3. Autonomous Berthing Model of USV Based on CMA-ES
3.3.1. Constraint Condition
3.3.2. Objective Function
4. Simulation Analysis
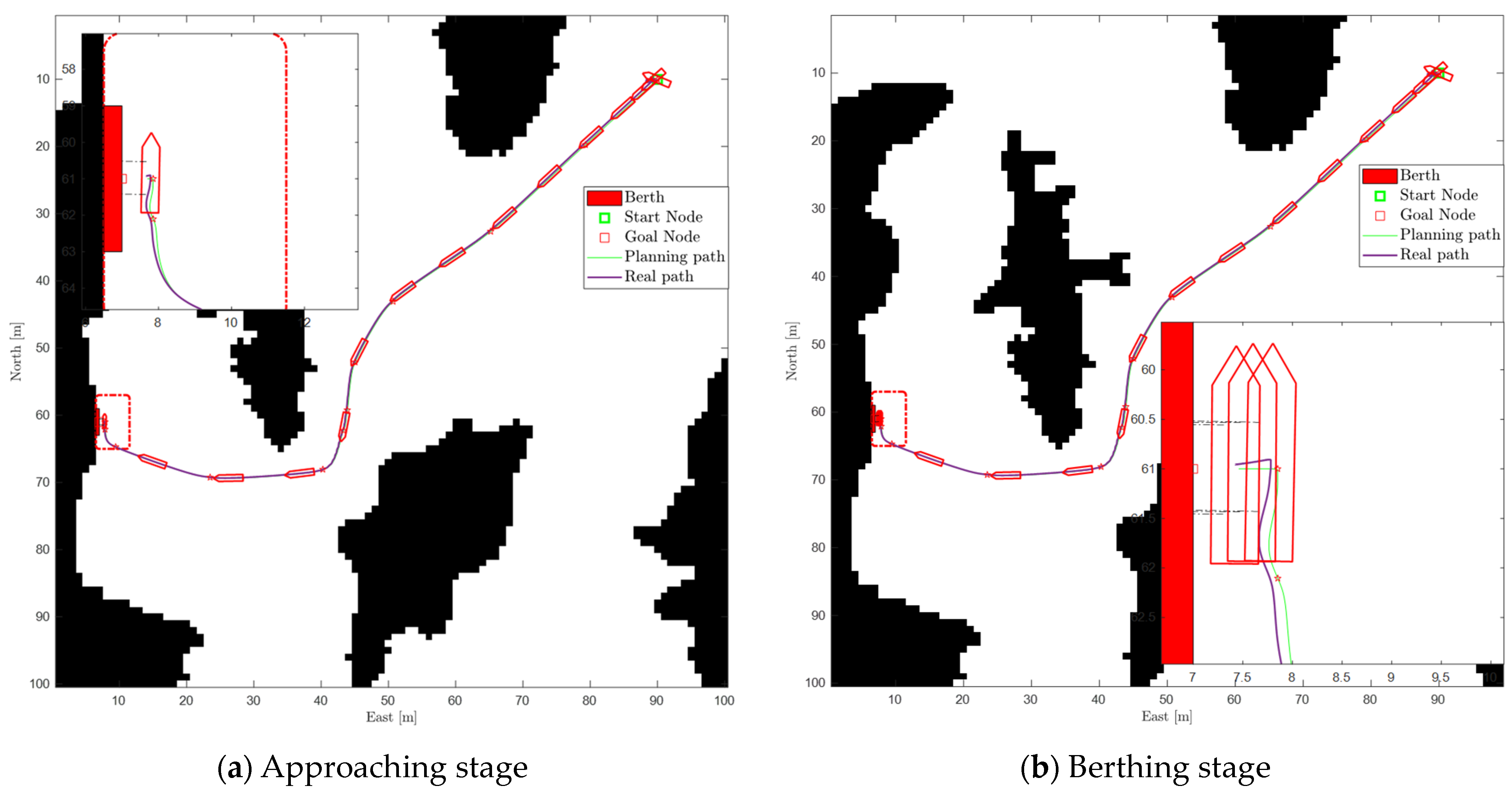
4.1. Automatic Berthing of USV Based on LQR
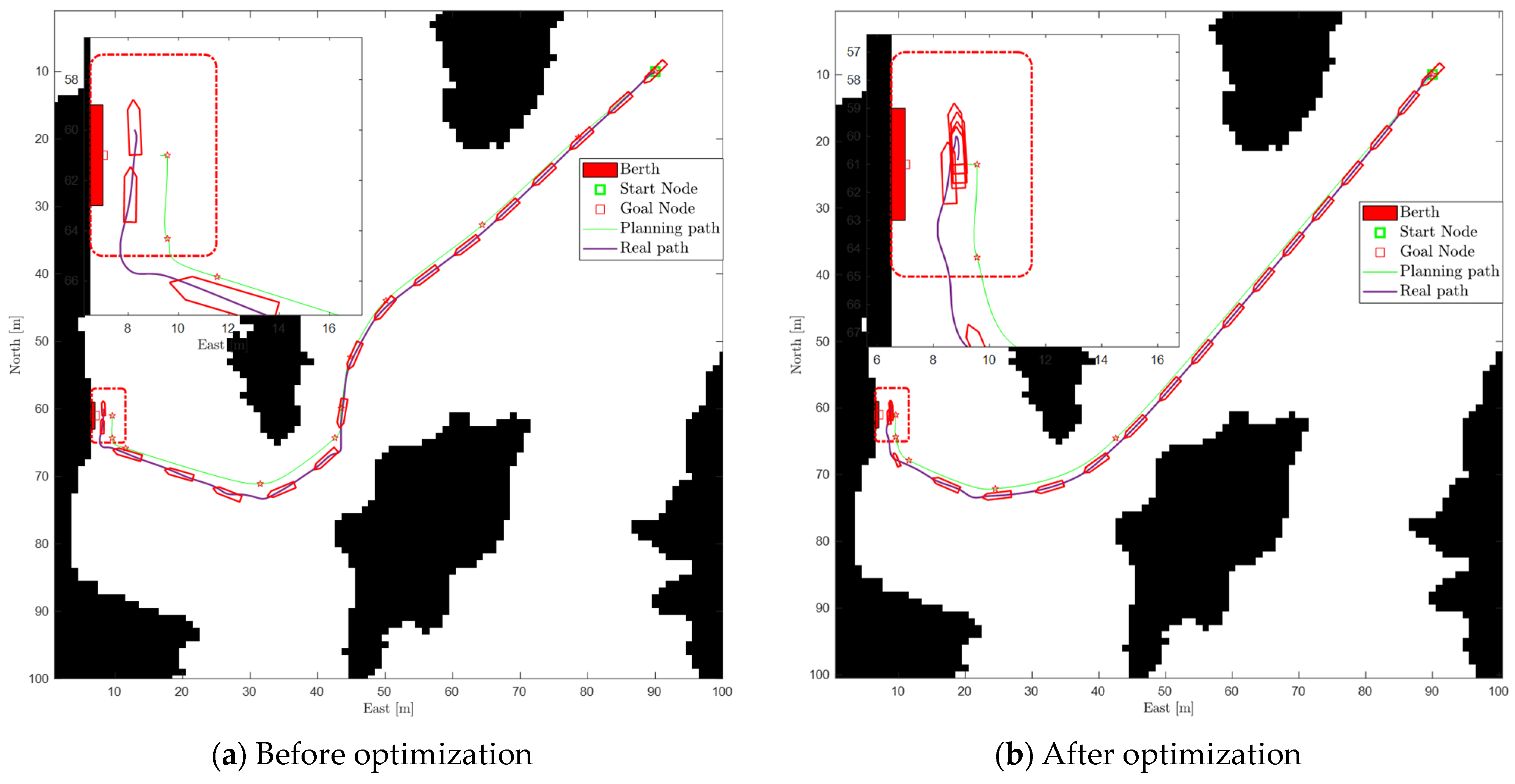
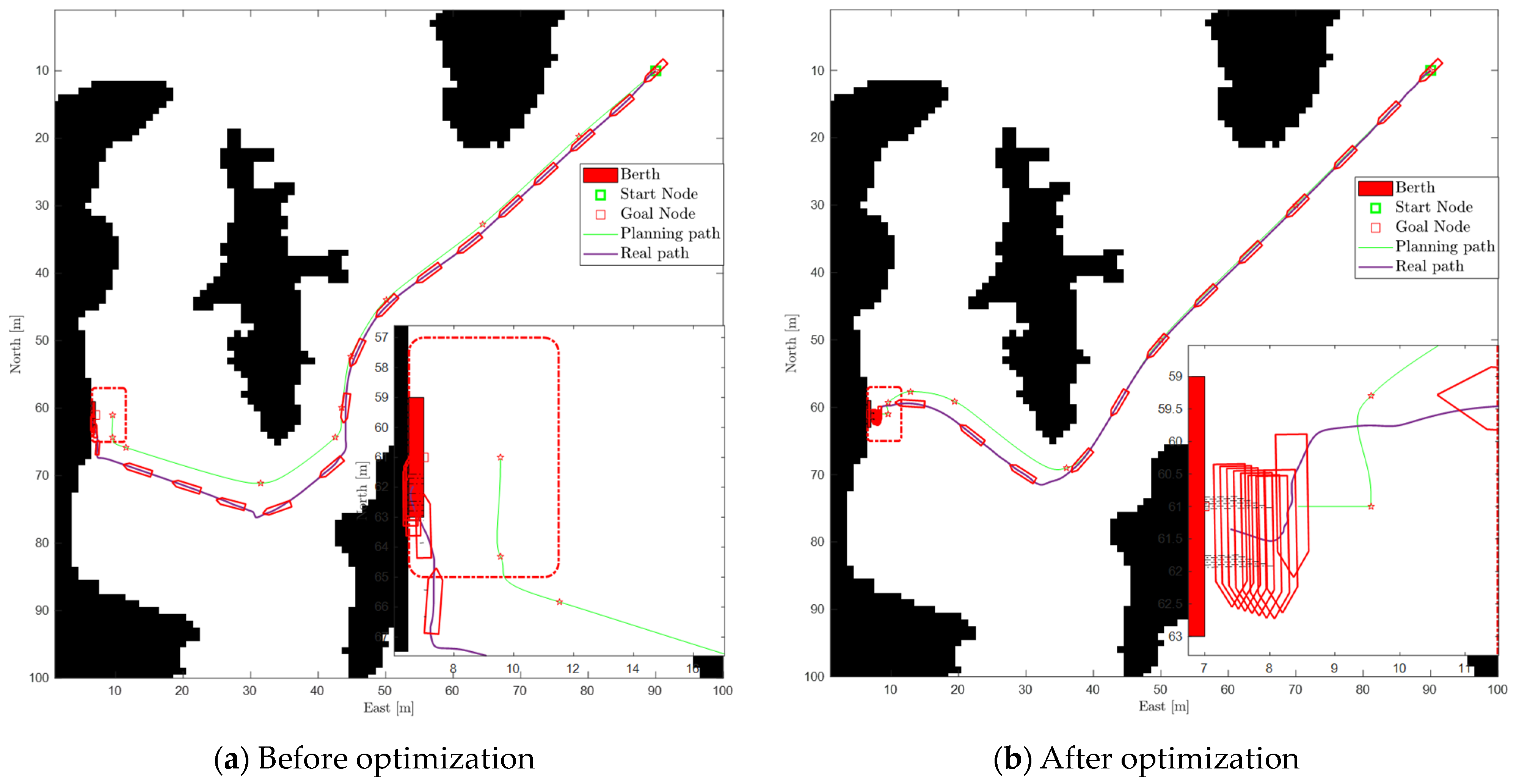
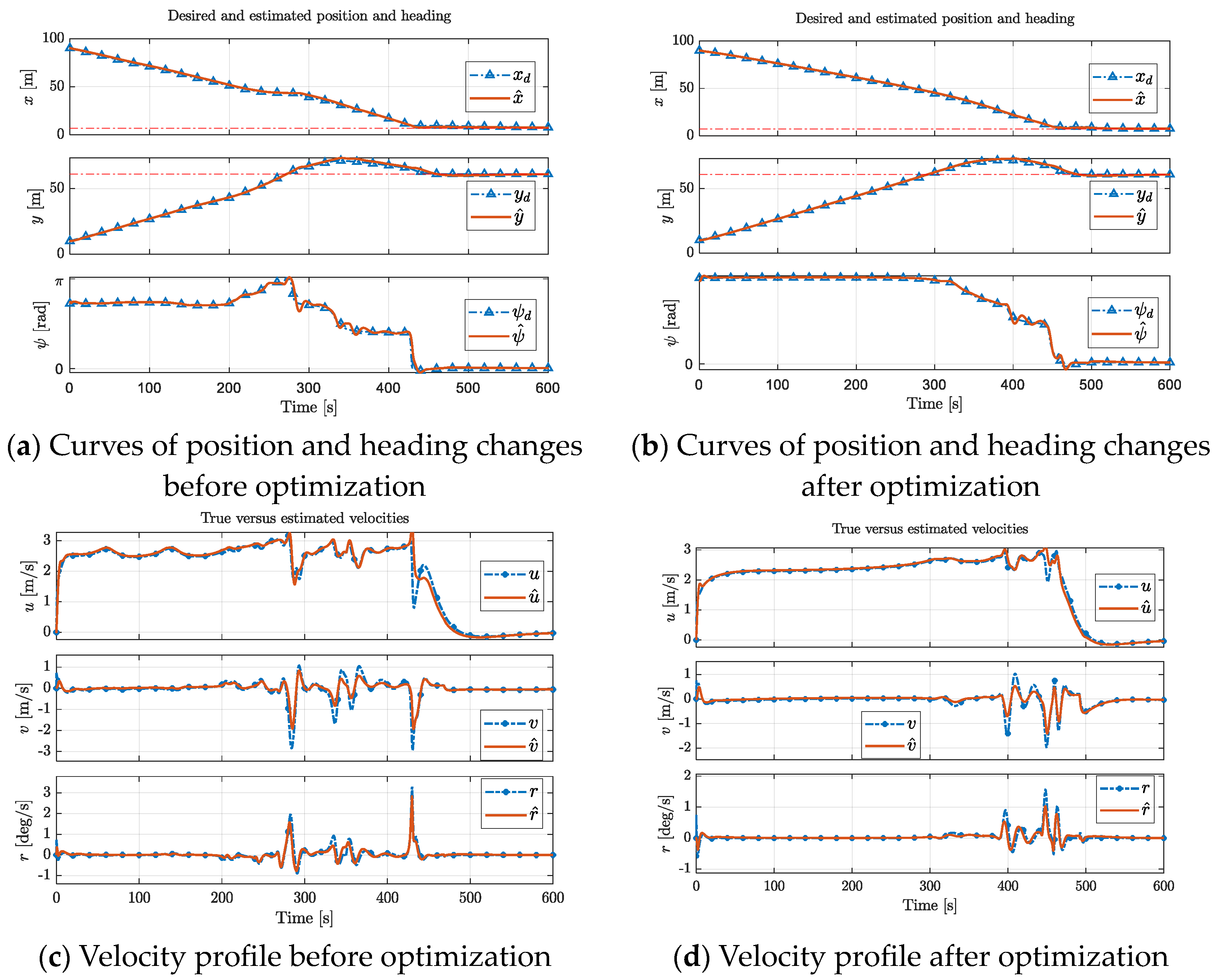
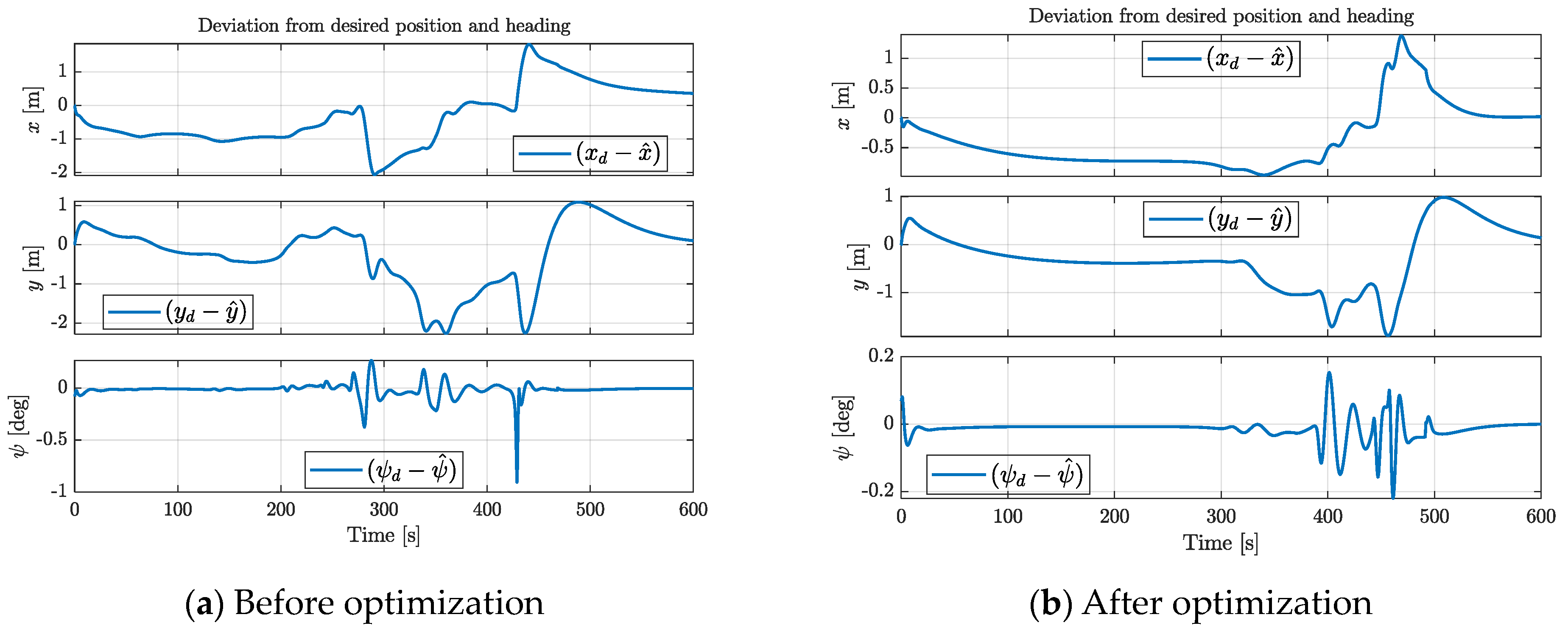
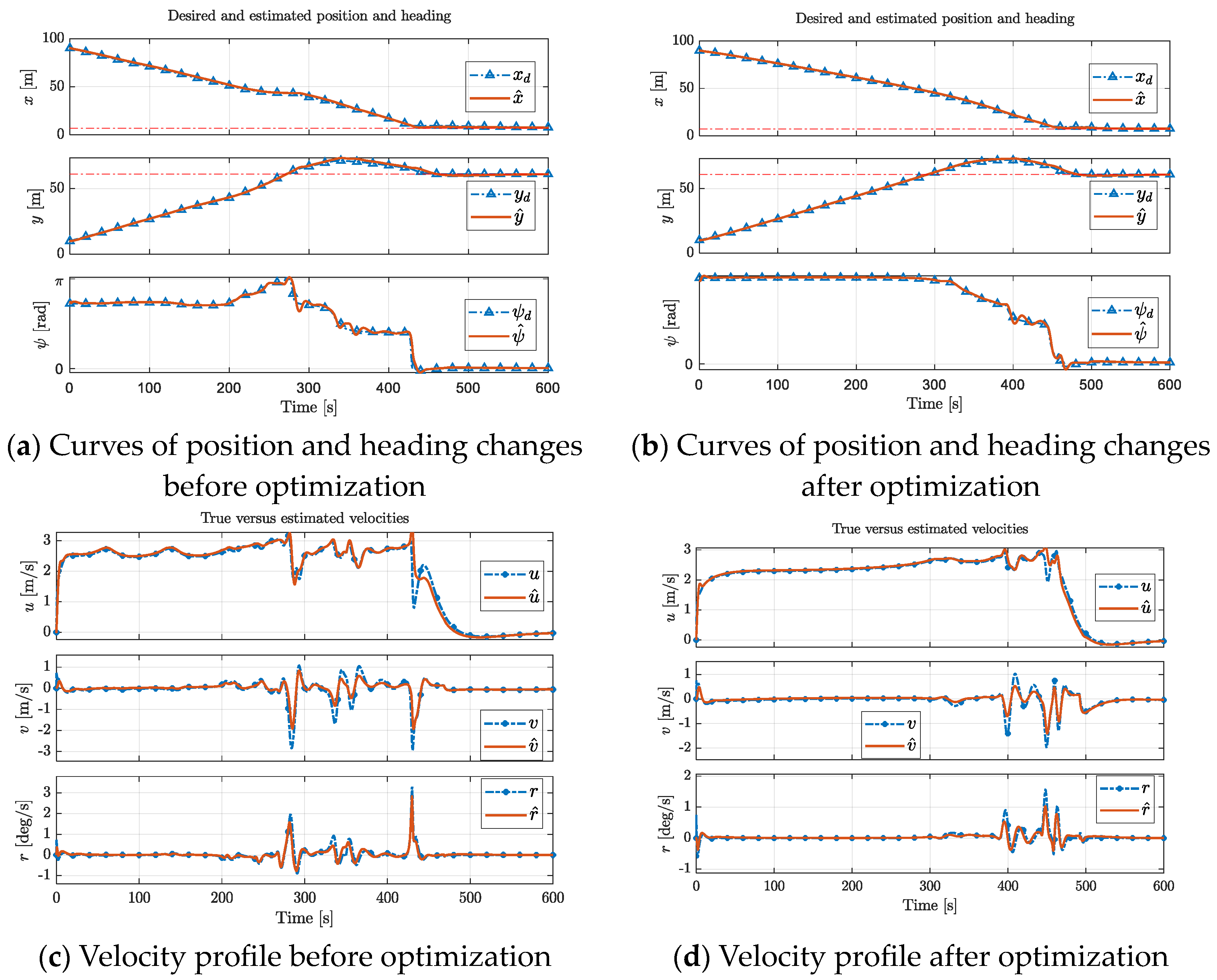
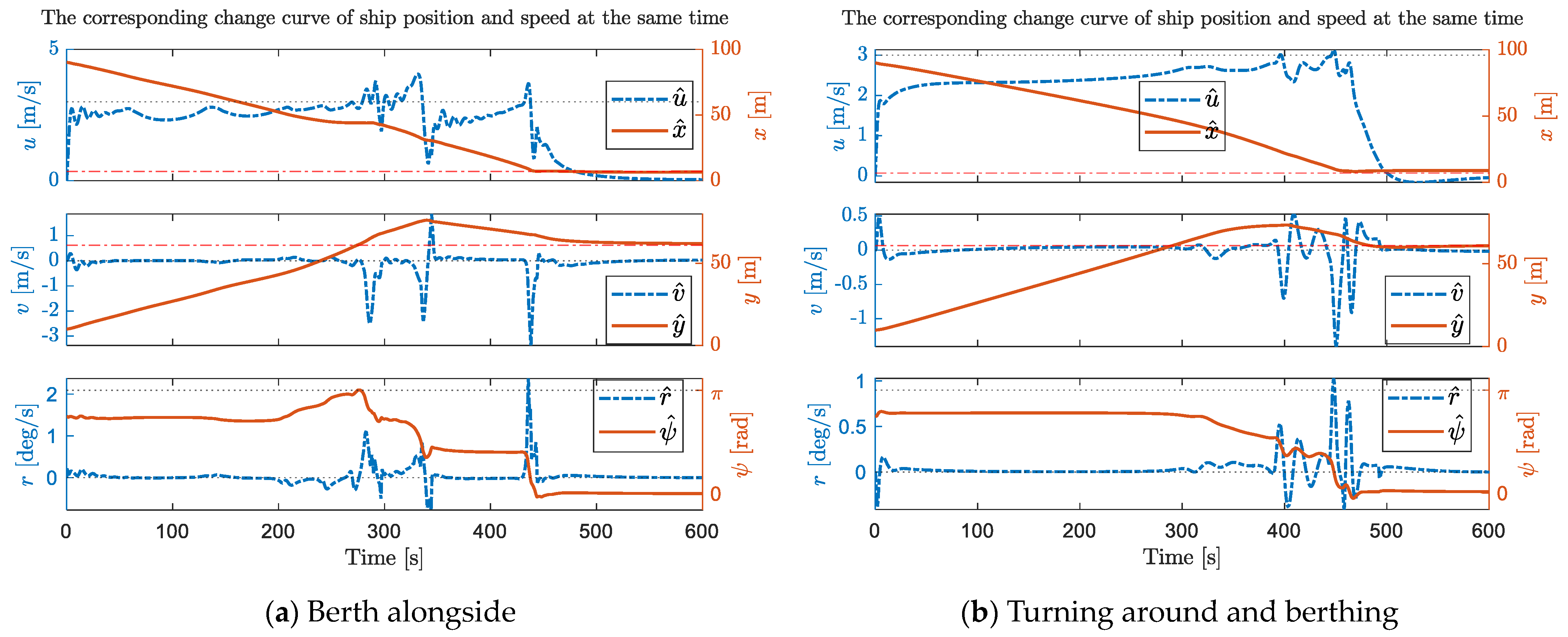
4.2. Automatic Berthing of USV Based on CMA-ES Optimization
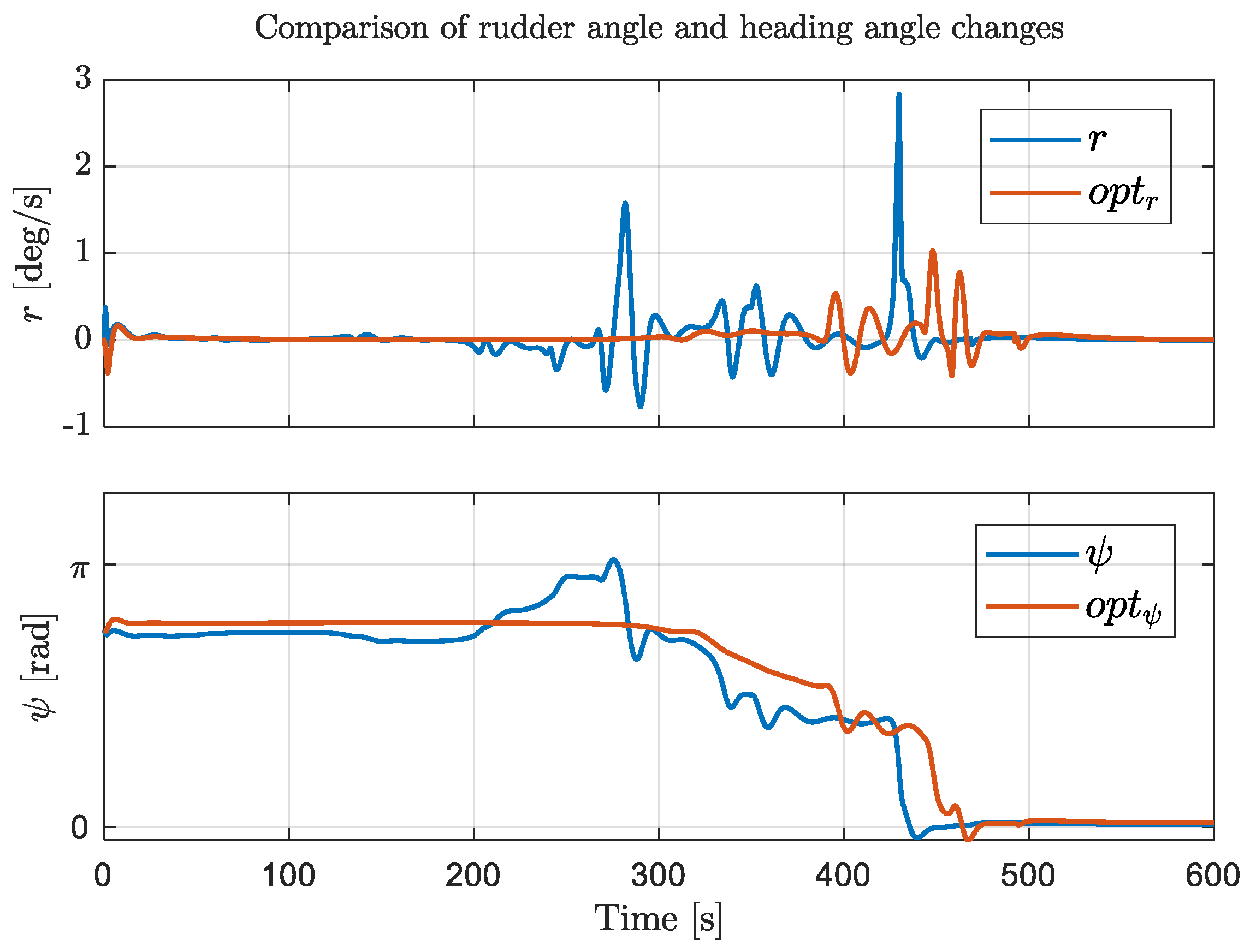
4.3. Result Analysis
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Kose, K.; Fukudo, J.; Sugano, K.; Akagi, S.; Harada, M. Study on a Computer Aided Manoeuvring System in Harbours. Nav. Archit. Ocean. Eng. 1987, 25, 105–113. [Google Scholar]
- Mizuno, N.; Uchida, Y.; Okazaki, T. Quasi Real-Time Optimal Control Scheme for Automatic Berthing. IFAC Pap. Line 2015, 48, 305–312. [Google Scholar] [CrossRef]
- Zhang, Q.; Zhang, X.; Im, N. Ship nonlinear-feedback course keeping algorithm based on MMG model driven by bipolar sigmoid function for berthing. Int. J. Nav. Archit. Ocean. Eng. 2017, 9, 525–536. [Google Scholar] [CrossRef]
- Xu, H.X.; Zhu, M.F.; Yu, W.Z. Robust adaptive control for automatic berthing of intelligent ships. J. Huazhong Univ. Sci. Technol. (Nat. Sci. Ed.) 2020, 48, 25–29. [Google Scholar]
- Han, Z.Z. Simulation Study on Automatic Berthing of Ships Based on Active Disturbance Rejection Neural Network Control. Master’s thesis, Dalian Maritime University, Dalian, China, 2020. [Google Scholar]
- Jia, Y.P.; Shen, H.L.; Yin, Y.; Zhang, X.F. Simulation of autonomous berthing of unmanned ships based on neural network. China Navig. 2021, 44, 107–111. [Google Scholar]
- Wang, S.; Jin, H.; Meng, L.; Li, C. Optimize motion energy of AUV based on LQR control strategy. In Proceedings of the 2016 35th Chinese Control Conference (CCC), Chengdu, China, 27–29 July 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 4615–4620. [Google Scholar]
- Yang, S.F. Research on Multi-Objective Optimization Based on Adaptive Learning Mechanism of Covariance Matrix. Master’s thesis, Guizhou University, Guiyang, China, 2019. [Google Scholar]
- Maki, A.; Sakamoto, N.; Akimoto, Y.; Nishikawa, H.; Umeda, N. Application of optimal control theory based on the evolution strategy (CMA-ES) to automatic berthing. J. Mar. Sci. Technol. 2020, 25, 221–233. [Google Scholar] [CrossRef]
- Maniyappan, S.; Umeda, N.; Maki, A.; Akimoto, Y. Effectiveness and mechanism of broaching-to prevention using global optimal control with evolution strategy (CMA-ES). J. Mar. Sci. Technol. 2021, 26, 382–394. [Google Scholar] [CrossRef]
- Miyauchi, Y.; Maki, A.; Umeda, N.; Rachman, D.M.; Akimoto, Y. System parameter exploration of ship maneuvering model for automatic docking/berthing using CMA-ES. J. Mar. Sci. Technol. 2022, 27, 1065–1083. [Google Scholar] [CrossRef]
- Yazdanpanah, R.; Mahjoob, M.J.; Abbasi, E. Fuzzy LQR controller for heading control of an unmanned surface vessel. In Proceedings of the International Conference in Electrical and Electronics Engineering, Selangor, Malaysia, 4–5 December 2013; pp. 73–78. [Google Scholar]
- Brasel, M. Adatpive LQR control system for the nonlinear 4-DoF model of a container vessel. In Proceedings of the 2013 18th International Conference on Methods & Models in Automation & Robotics (MMAR), Miedzyzdroje, Poland, 26–29 August 2013; IEEE: Piscataway, NJ, USA, 2013; pp. 711–716. [Google Scholar]
- Shao, C. Research on Large Ship Maneuvering Motion Control Based on LQR. Master’s thesis, Shanghai Jiao Tong University, Shanghai, China, 2017. [Google Scholar]
- Esmailian, E.; Farzanegan, B.; Malekizadeh, H.; Ghassemi, H.; Ardestani, M.F.; Menhaj, M.B. Control System Design for a Surface Effect Ship by Linear-Quadratic Regulator Method. J. Mar. Eng. 2017, 13, 47–56. [Google Scholar]
- Tian, T. Research on Rudder Roll Stabilization Control System Based on Robust Optimal Control. Master’s thesis, Harbin Engineering University, Harbin, China, 2021. [Google Scholar]
- Zhao, Y.; Zhang, Z.; Wang, J.; Wang, H. Fin-Rudder Joint Control Based on Improved Linear-Quadratic-Regulator Algorithm. IEEE Access 2022, 10, 111105–111114. [Google Scholar] [CrossRef]
- Chen, J.Y. Walking Optimization of Simulated Soccer Robot Based on Improved CMA-ES. Master’s thesis, Nanjing University of Posts and Telecommunications, Nanjing, China, 2020. [Google Scholar]
- Maki, A.; Sakamoto, N.; Akimoto, Y.; Banno, Y.; Maniyappan, S.; Umeda, N. On broaching-to prevention using optimal control theory with evolution strategy (CMA-ES). J. Mar. Sci. Technol. 2021, 26, 71–87. [Google Scholar] [CrossRef]
- Maki, A.; Akimoto, Y.; Naoya, U. Application of optimal control theory based on the evolution strategy (CMA-ES) to automatic berthing (part: 2). J. Mar. Sci. Technol. 2021, 26, 835–845. [Google Scholar] [CrossRef]
- Liu, Z.L.; Yuan, S.Z.; Zheng, L.H.; Jiang, J.Y.; Sun, Y.X. The development status and trend of ship automatic berthing technology. China Shipbuild. 2021, 62, 293–304. [Google Scholar]
- Akimoto, Y.; Miyauchi, Y.; Maki, A. Saddle Point Optimization with Approximate Minimization Oracle and Its Application to Robust Berthing Control. ACM Trans. Evol. Learn. Optim. 2022, 2, 1–32. [Google Scholar] [CrossRef]
- Miyauchi, Y.; Sawada, R.; Akimoto, Y.; Umeda, N.; Maki, A. Optimization on planning of trajectory and control of autonomous berthing and unberthing for the realistic port geometry. Ocean. Eng. 2022, 245, 110390. [Google Scholar] [CrossRef]
- Homburger, H.; Wirtensohn, S.; Reuter, J. Docking control of a fully-actuated autonomous vessel using model predictive path integral control. In Proceedings of the 2022 European Control Conference (ECC), London, UK, 12–15 July 2022; IEEE: Piscataway, NJ, USA, 2022; pp. 755–760. [Google Scholar]
- Sawada, R.; Hirata, K.; Kitagawa, Y.; Saito, E.; Ueno, M.; Tanizawa, K.; Fukuto, J. Path following algorithm application to automatic berthing control. J. Mar. Sci. Technol. 2021, 26, 541–554. [Google Scholar] [CrossRef]
- Zhang, H.; Yin, C.; Zhang, Y.; Jin, S.; Li, Z. Reinforcement Learning from Demonstrations by Novel Interactive Expert and Application to Automatic Berthing Control Systems for Unmanned Surface Vessel. arXiv 2022, arXiv:2202.113252022. [Google Scholar]
- Kamil, A.; Melhaoui, Y.; Mansouri, K.; Rachik, M. Artificial neural network and mathematical modeling of automatic ship berthing. Commun. Math. Biol. Neurosci. 2022, 2022, 113. [Google Scholar]
- Xu, Z.; Galeazzi, R. Guidance and Motion Control for Automated Berthing of Twin-waterjet Propelled Vessels. IFAC-Pap. Line 2022, 55, 58–63. [Google Scholar] [CrossRef]
- China Classification Society. Guidelines for Autonomous Cargo Ships (2018) Released. Ship Stand. Eng. 2018, 51, 53. [Google Scholar]
- Yoshimura, Y. Study on Mathematical Model of Steering Motion in Shallow Water (Part 2): Fluid Forces Acting on Main Hull during Low-speed Steering. J. Kansai Shipbuild. Ocean. Eng. 1988, 77–84. [Google Scholar]
- Fossen, T.I. Handbook of Marine Craft Hydrodynamics and Motion Control; John Wiley & Sons: Hoboken, NJ, USA, 2011. [Google Scholar]
- Sun, B.D. Theoretical Basis of Modern Control, 4rd ed; Mechanical Industry Press: Beijing, China, 2018. [Google Scholar]
- Hansen, N.; Kern, S. Evaluating the CMA evolution strategy on multimodal test functions. In Proceedings of the PPSN 2004: Parallel Problem Solving from Nature—PPSN VIII, Birmingham, UK, 18–22 September 2004; Springer: Berlin/Heidelberg, Germany, 2004; Volume 8, pp. 282–291. [Google Scholar]
- Fossen, T.I. A nonlinear unified state-space model for ship maneuvering and control in a seaway. Int. J. Bifurc. Chaos 2005, 15, 2717–2746. [Google Scholar] [CrossRef]
- Zhang, X.K.; Zhang, G.Q. Simple and Robust Control of Ship Maneuvering in Port. China Navig. 2014, 37, 31–34. [Google Scholar]
- Khatib, O. Real-Time Obstacle Avoidance for Manipulators and Mobile Robots. Int. J. Robot. Res. 1986, 5, 90–98. [Google Scholar] [CrossRef]
- Liu, X.Z. Research on Automatic Berthing Control of Ships Based on Optimal Trajectory Planning. Master’s thesis, Dalian Maritime University, Dalian, China, 2020. [Google Scholar]
- Fu, Z.-Y. Self-reliant berthing and unberthing operation of small and medium-sized ships in restricted waters of tidal ports. China. Water Transport. (First Half Mon.) 2019, 56–58. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Core Method | Researchers | Outcome | Experiment |
|---|---|---|---|
| LQR control | Yazdanpanah et al. [12] | The feedback gain of the system was calibrated through the combination of LQR and fuzzy logical control. | Simulation |
| Brasel [13] | The heading angle and velocity of the vessel were modulated under disparate operating conditions via LQR. | Simulation | |
| Shao [14] | The kinetics of an oil tanker was governed within the limited boundary of the channel through an LQR controller. | Simulation | |
| Farzanegan et al. [15] | The heaving motions of a ship were damped using an LQR regulator. | Simulation | |
| Tian [16] | The yaw-checking maneuver was optimized under the straight sailing condition by an LQR controller. | Simulation | |
| Zhao et al. [17] | Based on the LQR, a controller without static error was utilized to achieve heading stabilization. | Simulation | |
| CMA-ES optimization | Chen [18] | The ambulatory kinetics of the robot were optimized. | Simulation |
| Maki et al. [9,19,20] | The frequent rudder, propeller operation and control objective function during the berthing process were optimized. | Simulation | |
| Maniyappan et al. [10] | Global optimization of the rudder control for the yaw checking. | Simulation | |
| Liu et al. [21] | A synopsis of the technology for automated docking and undocking at the current stage was given. | Simulation | |
| Akimoto et al. [22] | Antagonistic CMA-ES was used for automatic berthing control with uncertainty. | Simulation | |
| Miyauchi et al. [23] | A systematic berthing model was constructed and the berthing trajectory was optimized. | Simulation | |
| Other | Jia et al. [6] | The issue of excessive heading deviation was addressed through neural networks by berthing training data. | Simulation |
| Homburger et al. [24] | MPPI methodology was utilized to implement berthing control and achieve optimal control in a nonlinear system. | Simulation | |
| Sawada et al. [25] | An automated berthing control system was propounded and trajectory tracking was performed through numerical simulation. | Simulation | |
| Zhang et al. [26] | Reinforcement learning based on demonstration data was used for auto-berthing control. | Simulation | |
| Kamil et al. [27] | An ANN-based controller was proposed to simulate a human brain’s activity during the execution phase. | Simulation | |
| Xu et al. [28] | A three-phase guidance algorithm was devised to ensure stable operation of the vessel when transient and during berthing. | Simulation |
| Problems in Current Research | Solutions Given in This Paper |
|---|---|
| The disturbances of wind and currents are not considered. | The interference with the berthing process is considered. |
| The mechanical constraints of ship motion are not considered. | The mechanical constraint of rudder and propeller is added to the whole process of ship motion. |
| PID, robust and fuzzy control are inconspicuous in the MIMO field. | The LQR control method with good performance in MIMO is selected. |
| The difference in ship mathematical motion models (large drift angle) in the low-speed domain is not considered. | The low-speed large drift angle motion correction model is introduced in the berthing stage. |
| The overall optimization of the berthing process is not considered. | An architecture of the berthing control system is proposed. |
| Parameters | Configuration |
|---|---|
| System environment | Win11 Intel (R) Core (TM) i5-9500 CPU @3.00GHz 16G RAM |
| Parameters | Value |
|---|---|
| Length (m) | 2.00 |
| Width B (m) | 1.08 |
| Draft (m) | 0.1951 |
| Mass m (kg) | 55 |
| Rotation radius (m) | 0.432 |
| Square coefficient | 0.4 |
| Rudder angle δ range (°) | [−35, 35] |
| Propeller speed n range (r/s) | [−50, 50] |
| Parameters | Value |
|---|---|
| Simulation map | 100 m × 100 m |
| Initial point state | [90, 10, 120°] |
| Berthing point status | [7, 61, 0°] |
| [3 m/s, 0.075 m/s] | |
| [0.01 m, 3°] | |
| [0.075 m/s, 0.075 m/s] | |
| 2.5 °/s2 | |
| [0.75, 0.25, 0.25, 0.75] |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, G.; Yin, J.; Yang, S. Ship Autonomous Berthing Simulation Based on Covariance Matrix Adaptation Evolution Strategy. J. Mar. Sci. Eng. 2023, 11, 1400. https://doi.org/10.3390/jmse11071400
Chen G, Yin J, Yang S. Ship Autonomous Berthing Simulation Based on Covariance Matrix Adaptation Evolution Strategy. Journal of Marine Science and Engineering. 2023; 11(7):1400. https://doi.org/10.3390/jmse11071400
Chicago/Turabian StyleChen, Guoquan, Jian Yin, and Shenhua Yang. 2023. "Ship Autonomous Berthing Simulation Based on Covariance Matrix Adaptation Evolution Strategy" Journal of Marine Science and Engineering 11, no. 7: 1400. https://doi.org/10.3390/jmse11071400
APA StyleChen, G., Yin, J., & Yang, S. (2023). Ship Autonomous Berthing Simulation Based on Covariance Matrix Adaptation Evolution Strategy. Journal of Marine Science and Engineering, 11(7), 1400. https://doi.org/10.3390/jmse11071400