
Coastal Flood at Gâvres (Brittany, France): A Simulated Dataset to Support Risk Management and Metamodels Development

 ,
,  ,
, 
Abstract
1. Introduction
2. The Dataset and Methods
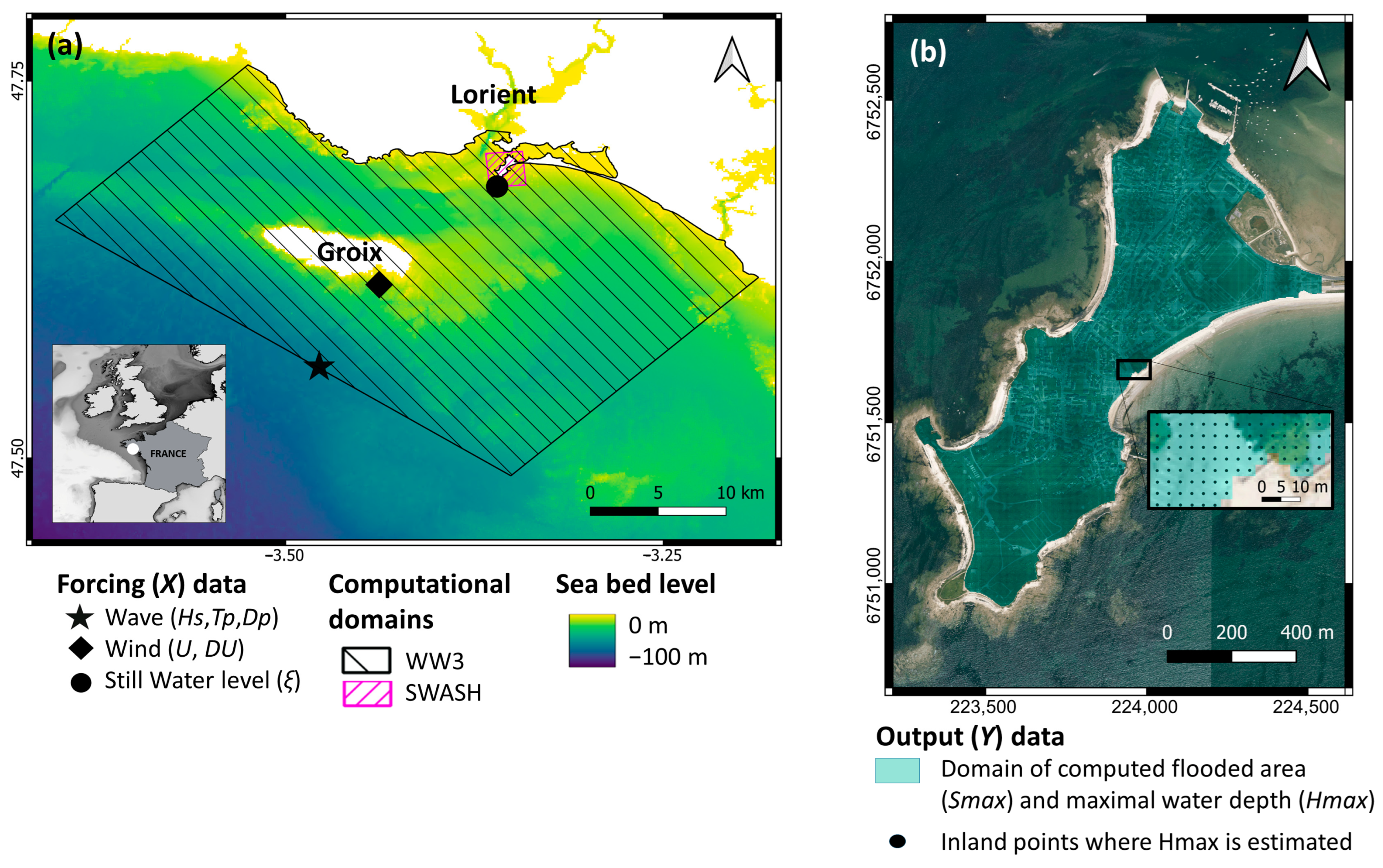
2.1. The Site and Dataset
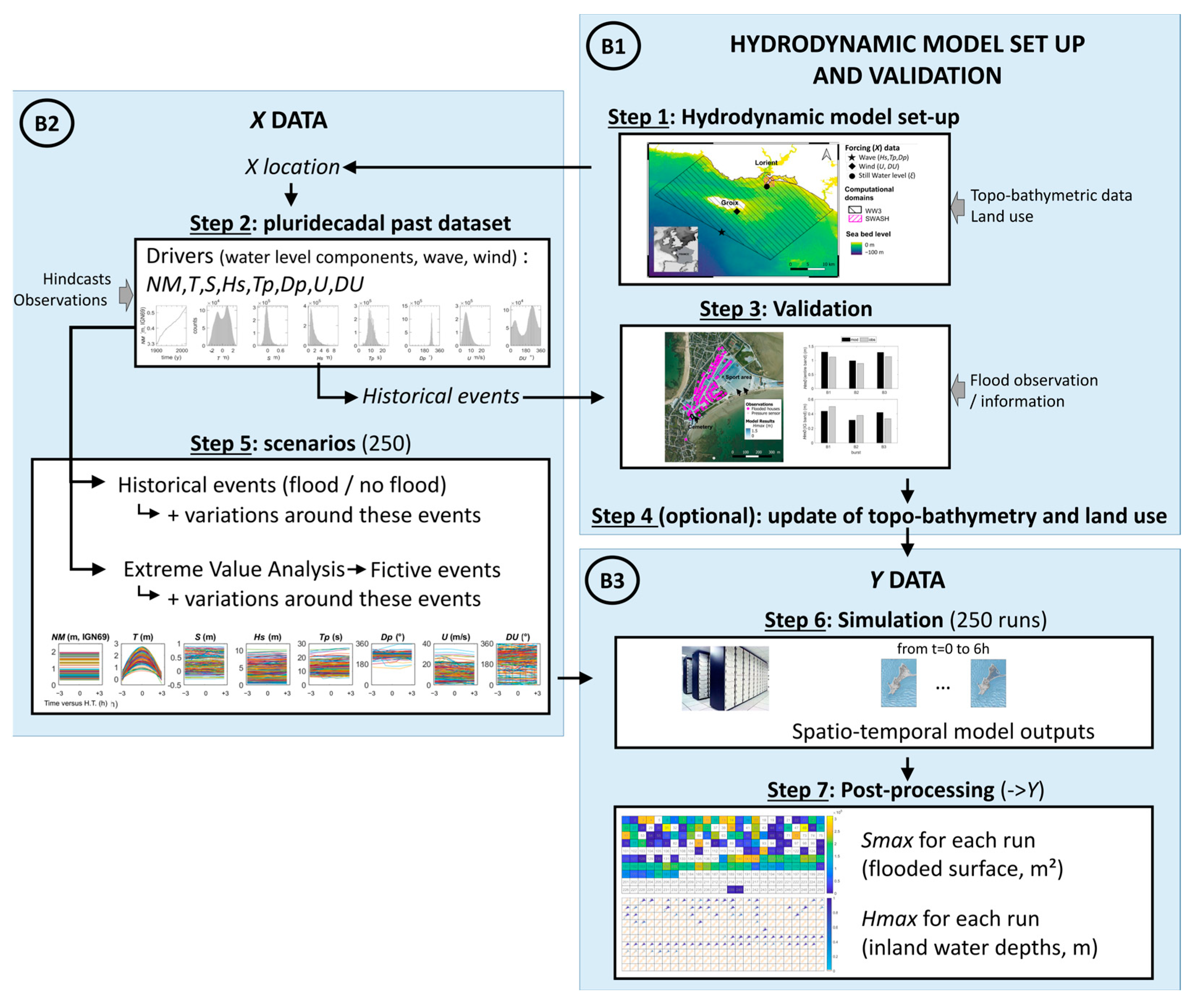
2.2. Method
- Step 1: Hydrodynamic model setup.
- Step 2: Constitution of a pluri-decadal past time series of the drivers (NM, T, S, Hs, Tp, Dp, U, DU) at the locations of forcing for the modelling chain.
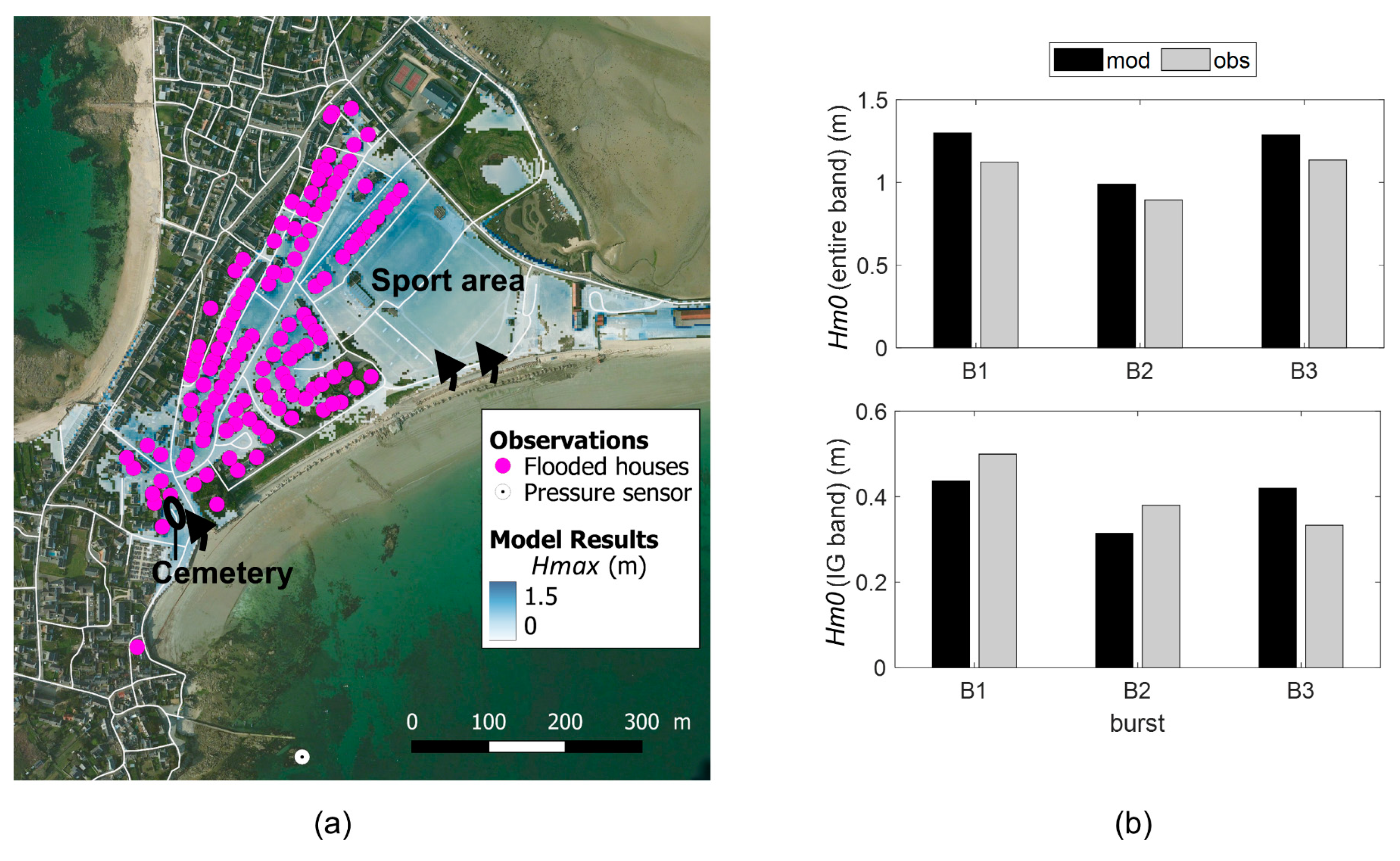
- Step 3: Validation of the modelling chain on past real events.
- Step 4 (optional): Update of the topo-bathymetry and land use in the model.
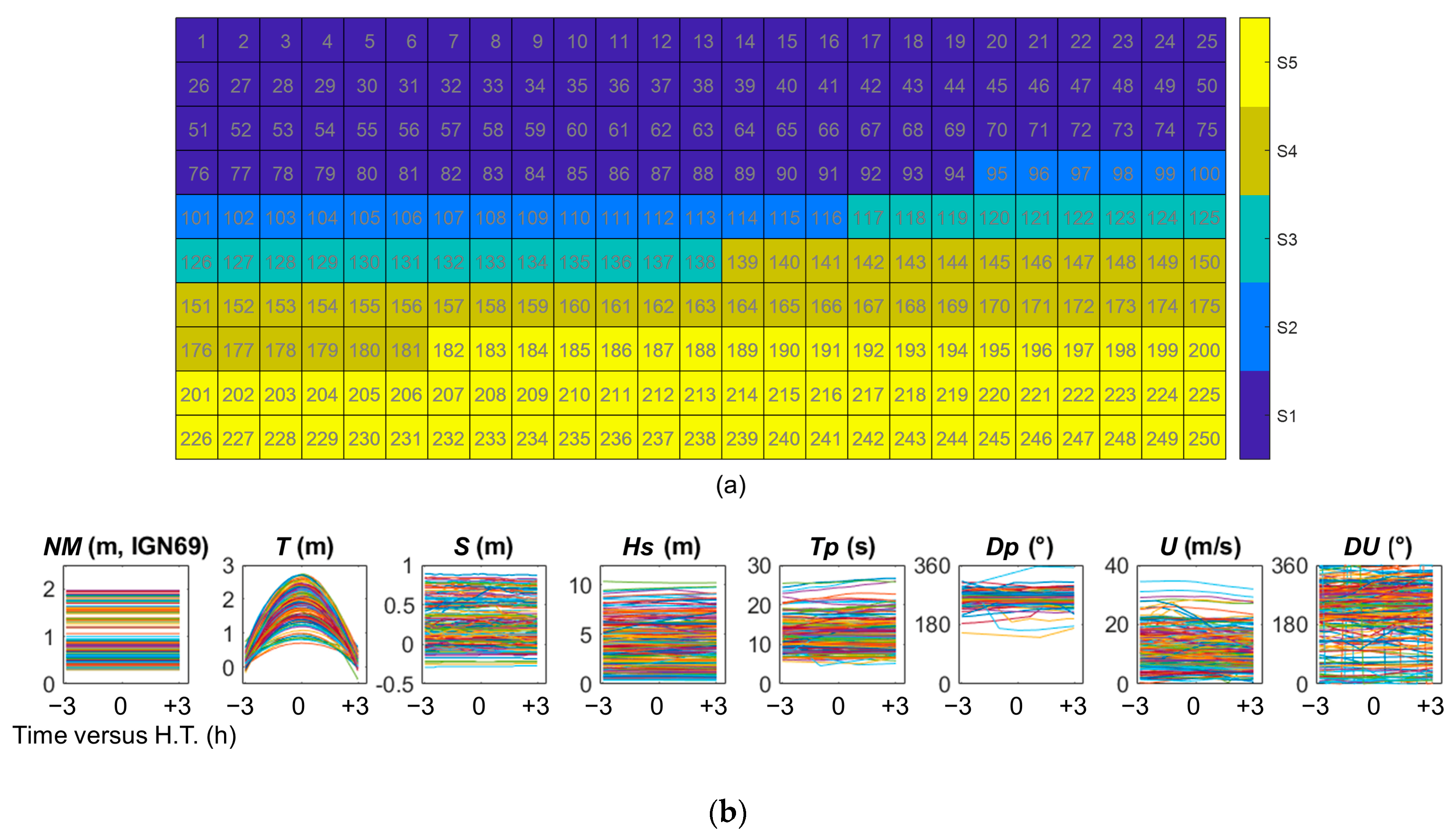
- Step 5: Definition of the scenarios (here, 250) of forcing conditions (X).
- Step 6: Simulation with the hydrodynamic modelling chain for the 250 scenarios.
- Step 7: Post-processing to provide the synthetic outputs (Y).
- Block 1: The hydrodynamic model setup, validation (and update).
- Block 2: The X data and design of the scenarios to be used in the simulations.
- Block 3: The Y data, obtained by simulations and post-processing of the model outputs.
2.3. Block 1: Coastal Flood Model Setup and Validation
2.4. Block 2: X Data and Grid Experiment Design
- Variations around one additional given real event (thus, one additional scenario in group S3).
- Variations around fictive events, focussing on events (group S1) for which an improvement of the multi-outputs metamodels of [16] was pursued. These scenarios correspond to the scenario group S4.
2.5. Block 3: Simulations and Post-Processing
3. Results and Examples of Use
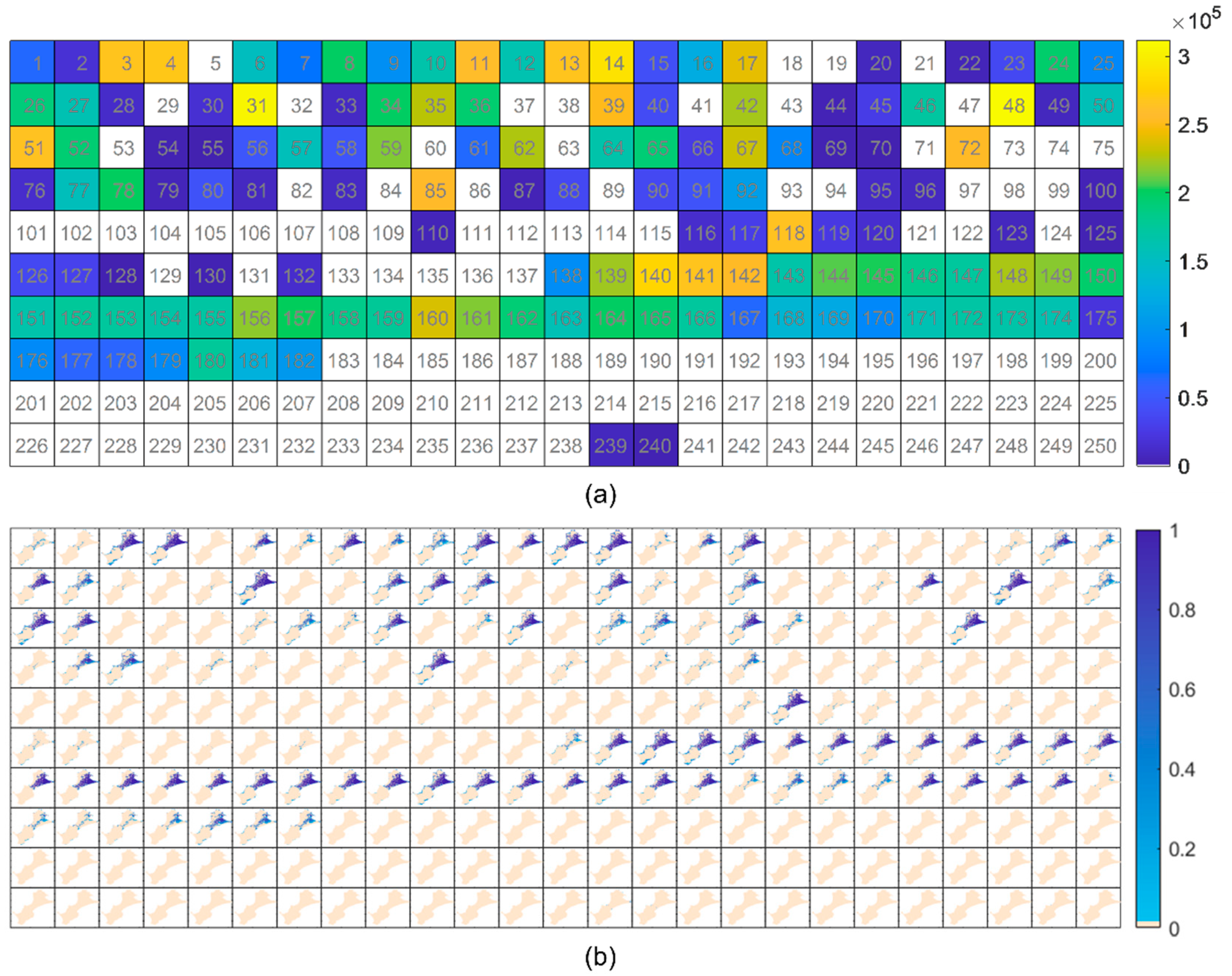
3.1. Results: Synthetic View of the Dataset
3.2. Examples of Analyses of the CFMDG Dataset
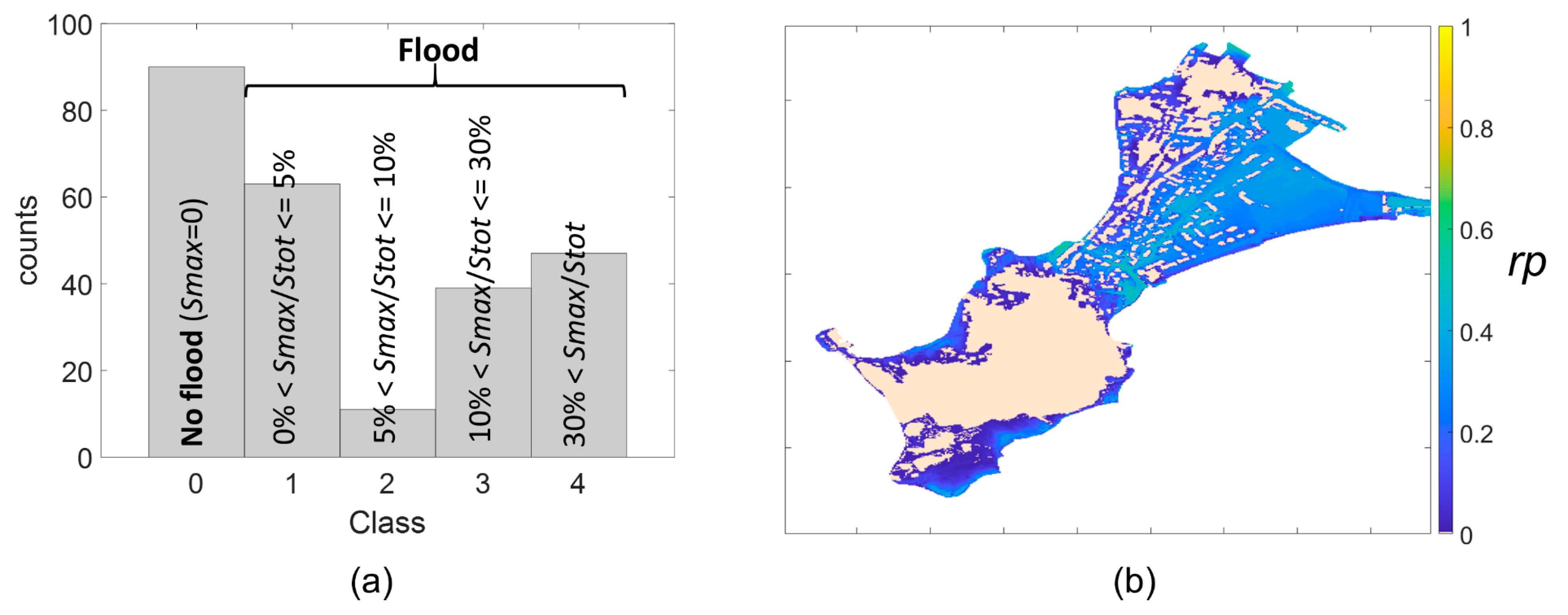
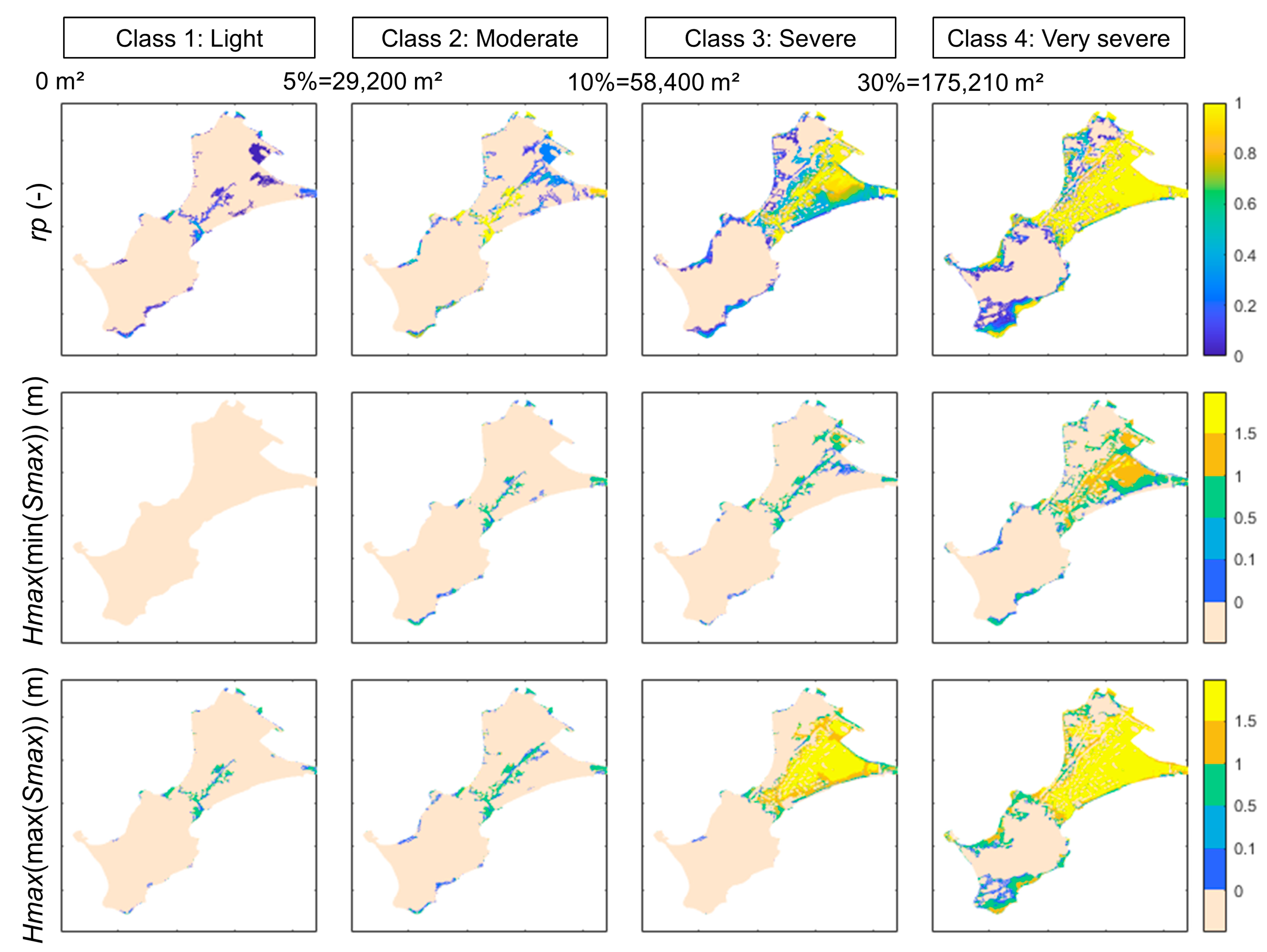
3.2.1. Flood Intensity and Spatial Flood Patterns
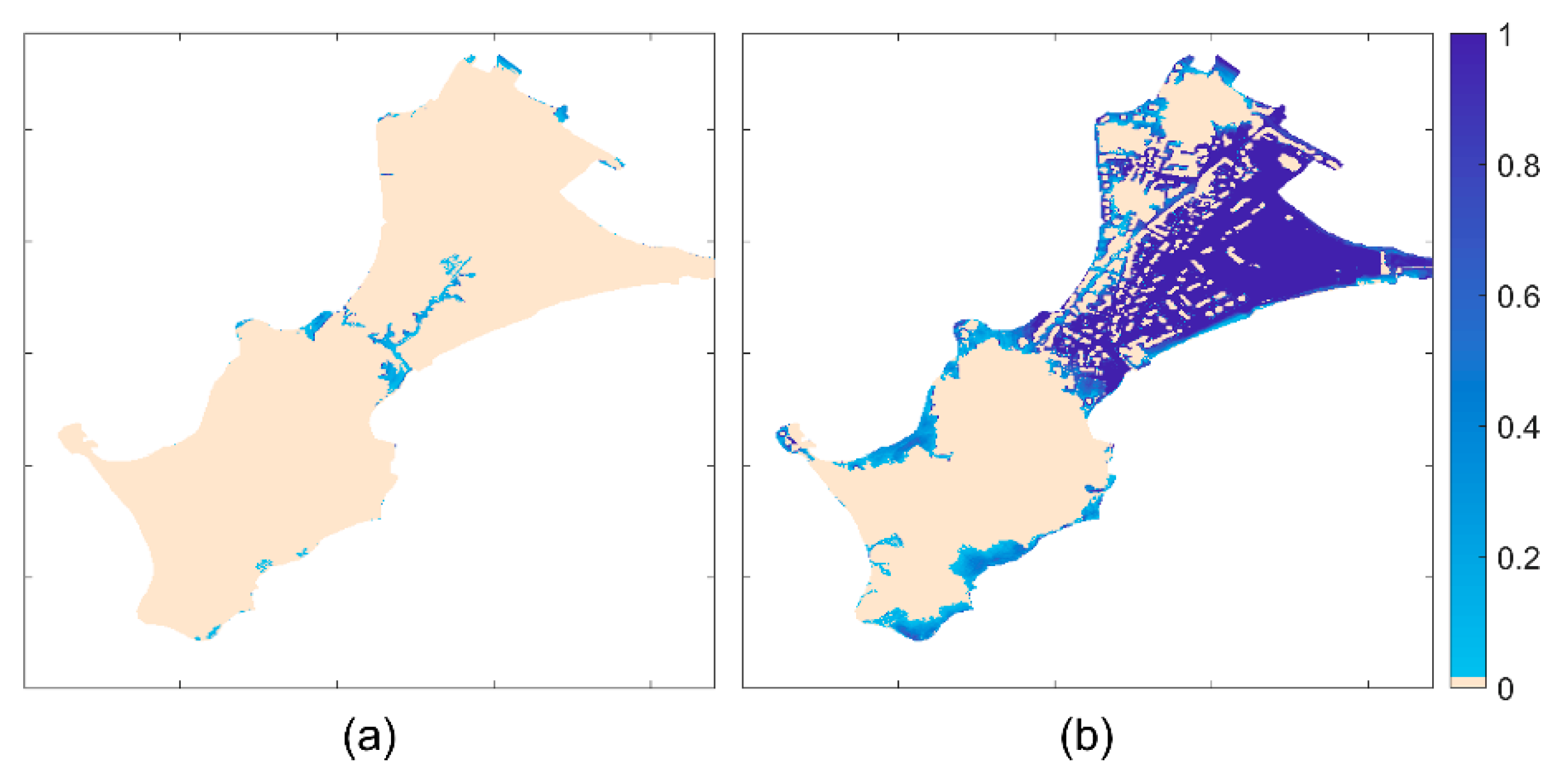
3.2.2. Present and Future Effect of Past Hydro-Meteorological Events
3.3. Examples of Use of the CFMDG Dataset for Methods Development and Forecast
4. Discussion
4.1. Use of the Dataset for Method Development and Forecasting
4.2. The limits of a Steady Topo-Bathymetry
4.3. Recommendations for Generating Similar Datasets in Other Locations
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A. Original Data Used to Build the HM Dataset

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Source | |||
|---|---|---|---|---|
| Name | Provider | References | Website | |
| Tide (T) | FES2014 | LEGOS | [18] | 1 |
| Storm surge (S) | 20CR * | NOAA | [37] | 2 |
| CFSR * | NOAA | [38] | 3 | |
| MARC | Ifremer-LOPS | [39] | 4 | |
| Waves (Hs,Tp,Dp) | SONEL (waves) | Liens | [40] | 5 |
| BoBWA | BRGM | [41] | 6 | |
| Homere | Ifremer-LOPS | [42] | 7 | |
| Norgasug | Ifremer-LOPS | [42] | 8 | |
| Wind (U,DU) | 20CR | NOAA | [37] | 2 |
| CFSR | NOAA | [38] | 3 |
References
- Wolf, J. Coastal Flooding: Impacts of Coupled Wave–Surge–Tide Models. Nat. Hazards 2009, 49, 241–260. [Google Scholar] [CrossRef]
- Le Roy, S.; Pedreros, R.; André, C.; Paris, F.; Lecacheux, S.; Marche, F.; Vinchon, C. Coastal Flooding of Urban Areas by Overtopping: Dynamic Modelling Application to the Johanna Storm (2008) in Gâvres (France). Nat. Hazards Earth Syst. Sci. 2015, 15, 2497–2510. [Google Scholar] [CrossRef]
- Idier, D.; Rohmer, J.; Pedreros, R.; Le Roy, S.; Lambert, J.; Louisor, J.; Le Cozannet, G.; Le Cornec, E. Coastal Flood: A Composite Method for Past Events Characterisation Providing Insights in Past, Present and Future Hazards—Joining Historical, Statistical and Modelling Approaches. Nat. Hazards 2020, 101, 465–501. [Google Scholar] [CrossRef]
- Idier, D.; Pedreros, R.; Rohmer, J.; Le Cozannet, G. The Effect of Stochasticity of Waves on Coastal Flood and Its Variations with Sea-Level Rise. J. Mar. Sci. Eng. 2020, 8, 798. [Google Scholar] [CrossRef]
- Gao, J.; Ma, X.; Zang, J.; Dong, G.; Ma, X.; Zhu, Y.; Zhou, L. Numerical Investigation of Harbor Oscillations Induced by Focused Transient Wave Groups. Coast. Eng. 2020, 158, 103670. [Google Scholar] [CrossRef]
- Rohmer, J.; Idier, D. A Meta-Modelling Strategy to Identify the Critical Offshore Conditions for Coastal Flooding. Nat. Hazards Earth Syst. Sci. 2012, 12, 2943–2955. [Google Scholar] [CrossRef]
- Rohmer, J.; Lecacheux, S.; Pedreros, R.; Quetelard, H.; Bonnardot, F.; Idier, D. Dynamic Parameter Sensitivity in Numerical Modelling of Cyclone-Induced Waves: A Multi-Look Approach Using Advanced Meta-Modelling Techniques. Nat. Hazards 2016, 84, 1765–1792. [Google Scholar] [CrossRef]
- Jia, G.; Taflanidis, A.A. Kriging Metamodeling for Approximation of High-Dimensional Wave and Surge Responses in Real-Time Storm/Hurricane Risk Assessment. Comput. Methods Appl. Mech. Eng. 2013, 261–262, 24–38. [Google Scholar] [CrossRef]
- Chondros, M.; Metallinos, A.; Papadimitriou, A.; Memos, C.; Tsoukala, V. A Coastal Flood Early-Warning System Based on Offshore Sea State Forecasts and Artificial Neural Networks. J. Mar. Sci. Eng. 2021, 9, 1272. [Google Scholar] [CrossRef]
- Idier, D.; Aurouet, A.; Bachoc, F.; Baills, A.; Betancourt, J.; Gamboa, F.; Klein, T.; López-Lopera, A.F.; Pedreros, R.; Rohmer, J.; et al. A User-Oriented Local Coastal Flooding Early Warning System Using Metamodelling Techniques. J. Mar. Sci. Eng. 2021, 9, 1191. [Google Scholar] [CrossRef]
- Ardhuin, F.; Rogers, W.E.; Babanin, A.V.; Filipot, J.; Magne, R.; Roland, A.; Van der Westhuysen, A.; Queffelou, P.; Lefevre, J.; Aouf, L.; et al. Semiempirical Dissipation Source Functions for Ocean Waves. Part I: Definition, Calibration, and Validation. J. Phys. Oceanogr. 2010, 40, 917–941. [Google Scholar] [CrossRef]
- Zijlema, M.; Stelling, G.; Smit, P. SWASH: An Operational Public Domain Code for Simulating Wave Fields and Rapidly Varied Flows in Coastal Waters. Coast. Eng. 2011, 58, 992–1012. [Google Scholar] [CrossRef]
- Idier, D.; Rohmer, J.; Pedreros, R.; Le Roy, S.; Betancourt, J. CFMDG: A Coastal Flood Modelling Dataset in Gâvres (France) to Support Risk Prevention and Metamodels Development. 2023. Available online: https://www.fatcat.wiki/release/co4mxdvhvzbtbiqhujwkri55tm (accessed on 13 June 2023).
- Betancourt, J.D. Functional-Input Metamodeling: An Application to Coastal Flood Early Warning. Ph.D. Thesis, Université Paul Sabatier—Toulouse III, Toulouse, France, 2020. [Google Scholar]
- Betancourt, J.; Bachoc, F.; Klein, T.; Idier, D.; Rohmer, J.; Deville, Y. FunGp: An R Package for Gaussian Process Regression with Scalar and Functional Inputs; Archive Ouverte HAL: Lyon, France, 2022. [Google Scholar]
- López-Lopera, A.F.; Idier, D.; Rohmer, J.; Bachoc, F. Multioutput Gaussian Processes with Functional Data: A Study on Coastal Flood Hazard Assessment. Reliab. Eng. Syst. Saf. 2022, 218, 108139. [Google Scholar] [CrossRef]
- Pedreros, R.; Idier, D.; Roy, S.L.; David, A.; Schaeffer, C.; Durand, J.; Desmazes, F. Infragravity waves in a complex macro-tidal environment: High frequency hydrodynamic measurements and modelling. Global Coastal Issues of 2020. J. Coast. Res. 2020, 95, 1235–1239. [Google Scholar] [CrossRef]
- Lyard, F.H.; Allain, D.J.; Cancet, M.; Carrère, L.; Picot, N. FES2014 Global Ocean Tide Atlas: Design and Performance. Ocean Sci. 2021, 17, 615–649. [Google Scholar] [CrossRef]
- Betancourt, J.; Bachoc, F.; Klein, T.; Idier, D.; Pedreros, R.; Rohmer, J. Gaussian Process Metamodeling of Functional-Input Code for Coastal Flood Hazard Assessment. Reliab. Eng. Syst. Saf. 2020, 198, 106870. [Google Scholar] [CrossRef]
- Gouldby, B.; Méndez, F.J.; Guanche, Y.; Rueda, A.; Mínguez, R. A Methodology for Deriving Extreme Nearshore Sea Conditions for Structural Design and Flood Risk Analysis. Coast. Eng. 2014, 88, 15–26. [Google Scholar] [CrossRef]
- Tharwat, A. Linear vs. Quadratic Discriminant Analysis Classifier: A Tutorial. Int. J. Appl. Pattern Recognit. 2016, 3, 145–180. [Google Scholar] [CrossRef]
- Rohmer, J.; Idier, D.; Thieblemont, R.; Le Cozannet, G.; Bachoc, F. Partitioning the Contributions of Dependent Offshore Forcing Conditions in the Probabilistic Assessment of Future Coastal Flooding. Nat. Hazards Earth Syst. Sci. 2022, 22, 3167–3182. [Google Scholar] [CrossRef]
- De Boor, C. A Practical Guide to Splines; Springer: New York, NY, USA, 1978; ISBN 978-0-38795-366-3. [Google Scholar]
- Jolliffe, I.T. Principal Component Analysis, 2nd ed.; Springer: New York, NY, USA; Berlin/Heidelberg, Germany, 2002; ISBN 978-0-38795-442-4. [Google Scholar]
- Antoniadis, A.; Helbert, C.; Prieur, C.; Viry, L. Spatio-Temporal Metamodeling for West African Monsoon. Environmetrics 2012, 23, 24–36. [Google Scholar] [CrossRef]
- Muehlenstaedt, T.; Fruth, J.; Roustant, O. Computer Experiments with Functional Inputs and Scalar Outputs by a Norm-Based Approach. Stat. Comput. 2017, 27, 1083–1097. [Google Scholar] [CrossRef]
- Nanty, S.; Helbert, C.; Marrel, A.; Pérot, N.; Prieur, C. Sampling, Metamodeling, and Sensitivity Analysis of Numerical Simulators with Functional Stochastic Inputs. SIAMASA J. Uncertain. Quantif. 2016, 4, 636–659. [Google Scholar] [CrossRef]
- Betancourt, J.D.; Bachoc, F.; Klein, T.; Gamboa, F. Ant Colony Based Model Selection for Functional-Input Gaussian Process Regression; Research Report D3.b; Institut de Mathématiques de Toulouse & Institut Universitaire de France, UMR 5219, Université de Toulouse, CNRS, UPS IMT; HAL: Lyon, France, 2020; Available online: https://hal-enac.archives-ouvertes.fr/hal-02532713 (accessed on 13 June 2023).
- Rohmer, J.; Idier, D.; Pedreros, R. A Nuanced Quantile Random Forest Approach for Fast Prediction of a Stochastic Marine Flooding Simulator Applied to a Macrotidal Coastal Site. Stoch. Environ. Res. Risk Assess. 2020, 34, 867–890. [Google Scholar] [CrossRef]
- Stein, M.L. Prediction and Inference for Truncated Spatial Data. J. Comput. Graph. Stat. 1992, 1, 91–110. [Google Scholar] [CrossRef]
- López-Lopera, A.F.; Bachoc, F.; Durrande, N.; Roustant, O. Finite-Dimensional Gaussian Approximation with Linear Inequality Constraints. SIAMASA J. Uncertain. Quantif. 2018, 6, 1224–1255. [Google Scholar] [CrossRef]
- Vanhatalo, J.; Vehtari, A. Sparse Log Gaussian Processes via MCMC for Spatial Epidemiology. In Proceedings of the Gaussian Processes in Practice, PMLR, Bletchley Park, UK, 2–13 June 2006; pp. 73–89. [Google Scholar]
- Ruggiero, P.; List, J.; Hanes, D.; Eshleman, J. Probabilistic Shoreline Change Modeling. In Coastal Engineering 2006; World Scientific Publishing Company: Singapore, 2007; pp. 3417–3429. ISBN 978-9-81270-636-2. [Google Scholar]
- Das, H.S.; Jung, H.; Ebersole, B.; Wamsley, T.; Whalin, R.W. An Efficient Storm Surge Forecasting Tool for Coastal Mississippi. Coast. Eng. Proc. 2010, 32, 21. [Google Scholar] [CrossRef]
- Rohmer, J.; Cozannet, G.L. Dominance of the Mean Sea Level in the High-Percentile Sea Levels Time Evolution with Respect to Large-Scale Climate Variability: A Bayesian Statistical Approach. Environ. Res. Lett. 2019, 14, 014008. [Google Scholar] [CrossRef]
- Santamaría-Gómez, A.; Gravelle, M.; Dangendorf, S.; Marcos, M.; Spada, G.; Wöppelmann, G. Uncertainty of the 20th Century Sea-Level Rise Due to Vertical Land Motion Errors. Earth Planet. Sci. Lett. 2017, 473, 24–32. [Google Scholar] [CrossRef]
- Compo, G.P.; Whitaker, J.S.; Sardeshmukh, P.D.; Allan, R.J.; McColl, C.; Yin, X.; Giese, B.S.; Vose, R.S.; Matsui, N.; Ashcroft, L.; et al. NOAA/CIRES Twentieth Century Global Reanalysis Version 2c 2015, 11.170 Tbytes. Available online: https://rda.ucar.edu/datasets/ds131.2/ (accessed on 13 June 2023).
- Dee, D.P.; Balmaseda, M.; Balsamo, G.; Engelen, R.; Simmons, A.J.; Thépaut, J.-N. Toward a Consistent Reanalysis of the Cli-mate System. Bull. Am. Meteorol. Soc. 2014, 95, 1235–1248. [Google Scholar] [CrossRef]
- Muller, H.; Pineau-Guillou, L.; Idier, D.; Ardhuin, F. Atmospheric Storm Surge Modeling Methodology along the French (Atlantic and English Channel) Coast. Ocean Dyn. 2014, 64, 1671–1692. [Google Scholar] [CrossRef]
- Bertin, X.; Prouteau, E.; Letetrel, C. A Significant Increase in Wave Height in the North Atlantic Ocean over the 20th Century. Glob. Planet. Change 2013, 106, 77–83. [Google Scholar] [CrossRef]
- Charles, E.; Idier, D.; Thiebot, J.; Le Cozannet, G.; Pedreros, R.; Ardhuin, F.; Planton, S. Present Wave Climate in the Bay of Biscay: Spatiotemporal Variability and Trends from 1958 to 2001. J. Clim. 2012, 25, 2020–2039. [Google Scholar] [CrossRef]
- Boudière, E.; Maisondieu, C.; Ardhuin, F.; Accensi, M.; Pineau-Guillou, L.; Lepesqueur, J. A Suitable Metocean Hindcast Data-base for the Design of Marine Energy Converters. Int. J. Mar. Energy 2013, 3–4, e40–e52. [Google Scholar] [CrossRef]









| Variable Name | Description and Unit | Comment |
|---|---|---|
| sc | Number of the scenario. | |
| INPUTS (X) | ||
| NM | Relative mean sea level, referenced to the French vertical datum (m, IGN69) | Time series over 6 h Input for the numerical simulations |
| T | Tidal water level (m), referenced to the relative mean sea level | |
| S | Atmospheric storm surge (m) | |
| Hs | Significant wave height (m) | |
| Tp | Wave peak period (s) | |
| Dp | Wave peak direction (° in nautical convention) | |
| U | Wind speed (m/s) | |
| DU | Wind direction (° in nautical convention) | |
| t | Relative time centred on the high tide of each event (min) | |
| High Tide date | UTC date for scenarios corresponding to past real events | |
| OUTPUTS (Y) | ||
| Smax | Maximum flooded area during the event (m²) | Post-processed scalar output |
| Hmax | Maximum water depth reached during the event (m), provided for each inland location | Post-processed functional (map) output |
| longitude | Longitude (°, WGS84) | For each inland location point |
| latitude | Latitude (°, WGS84) | |
| XL93 | Longitude (m, Lambert 93) | |
| YL93 | Latitude (m, Lambert 93) | |
| Name | Type | Number of Scenarios | Scenario n° |
|---|---|---|---|
| S1 | Fictive, based on extreme value analysis | 94 | 1 to 94 |
| S2 | Past real event, inside the damage database of [3] | 22 | 95 to 116 |
| S3 | Fictive, based on variations around real past forcing event | 22 | 117 to 138 |
| S4 | Fictive, based on variations around an extreme-value-analysis-based event | 44 | 139 to 182 |
| S5 | Past real event, outside the damage database of [3] | 68 | 183 to 250 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Idier, D.; Rohmer, J.; Pedreros, R.; Le Roy, S.; Betancourt, J.; Bachoc, F.; Lecacheux, S. Coastal Flood at Gâvres (Brittany, France): A Simulated Dataset to Support Risk Management and Metamodels Development. J. Mar. Sci. Eng. 2023, 11, 1314. https://doi.org/10.3390/jmse11071314
Idier D, Rohmer J, Pedreros R, Le Roy S, Betancourt J, Bachoc F, Lecacheux S. Coastal Flood at Gâvres (Brittany, France): A Simulated Dataset to Support Risk Management and Metamodels Development. Journal of Marine Science and Engineering. 2023; 11(7):1314. https://doi.org/10.3390/jmse11071314
Chicago/Turabian StyleIdier, Déborah, Jérémy Rohmer, Rodrigo Pedreros, Sylvestre Le Roy, José Betancourt, François Bachoc, and Sophie Lecacheux. 2023. "Coastal Flood at Gâvres (Brittany, France): A Simulated Dataset to Support Risk Management and Metamodels Development" Journal of Marine Science and Engineering 11, no. 7: 1314. https://doi.org/10.3390/jmse11071314
APA StyleIdier, D., Rohmer, J., Pedreros, R., Le Roy, S., Betancourt, J., Bachoc, F., & Lecacheux, S. (2023). Coastal Flood at Gâvres (Brittany, France): A Simulated Dataset to Support Risk Management and Metamodels Development. Journal of Marine Science and Engineering, 11(7), 1314. https://doi.org/10.3390/jmse11071314