

Estimation of Seawater Hydrophysical Characteristics from Thermistor Strings and CTD Data in the Sea of Japan Shelf Zone

 , ,
, ,  , and
, and
Abstract
1. Introduction
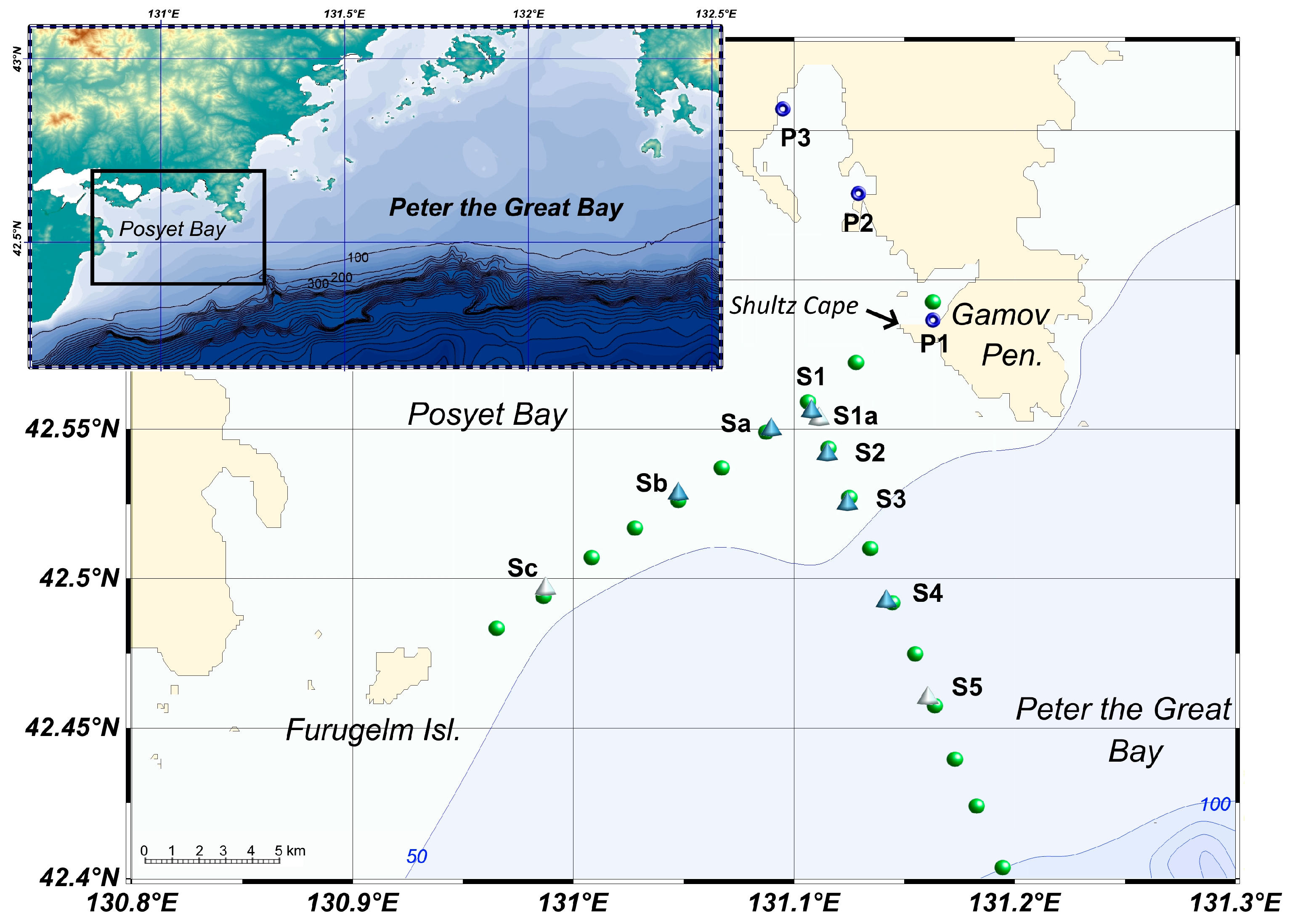
2. Study Area and Experimental Data
3. Correction of CTD Data
3.1. Errors of CTD Measurements
3.2. Minimization of Dynamic Errors
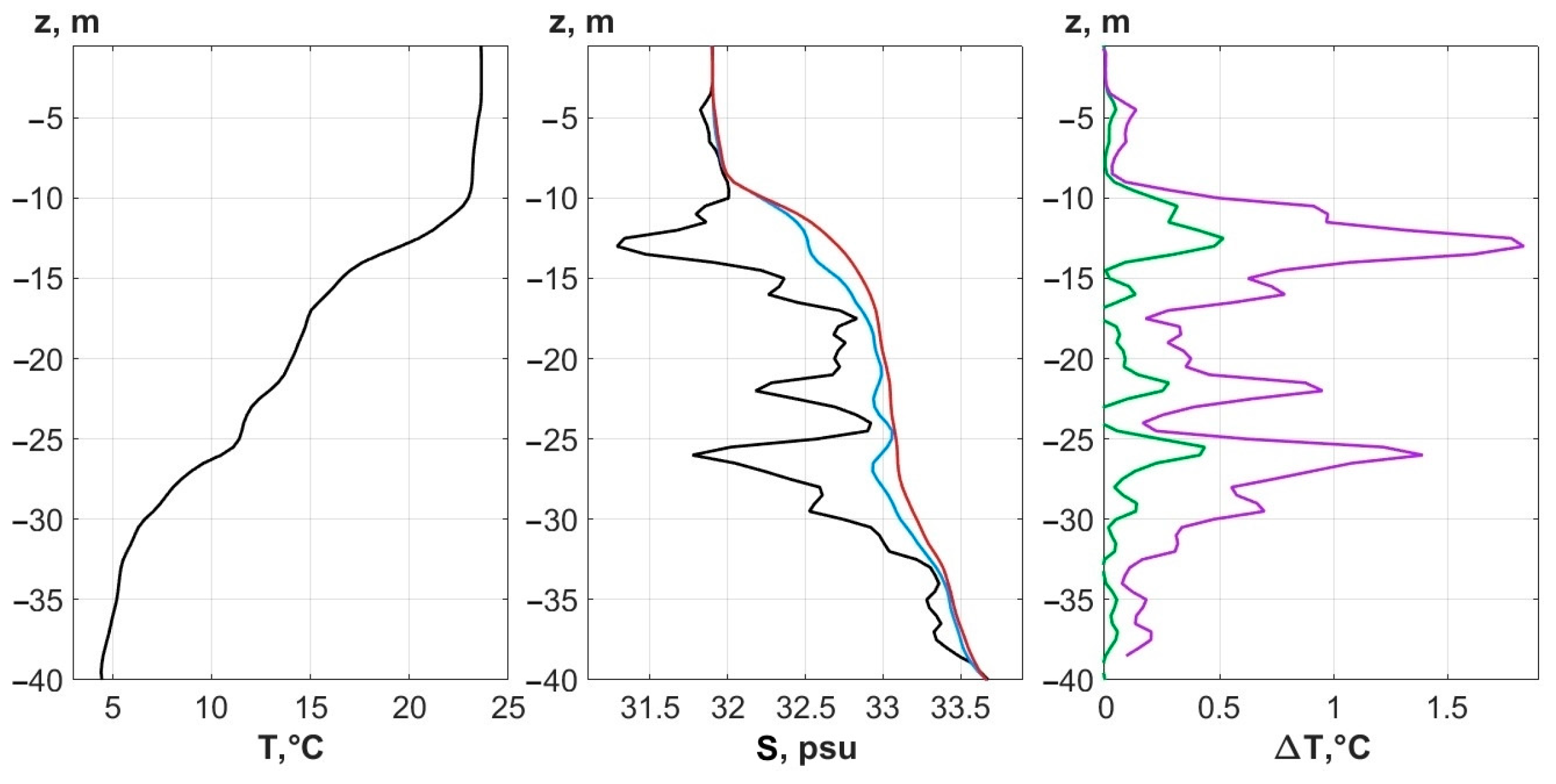
4. Ts Regression Method
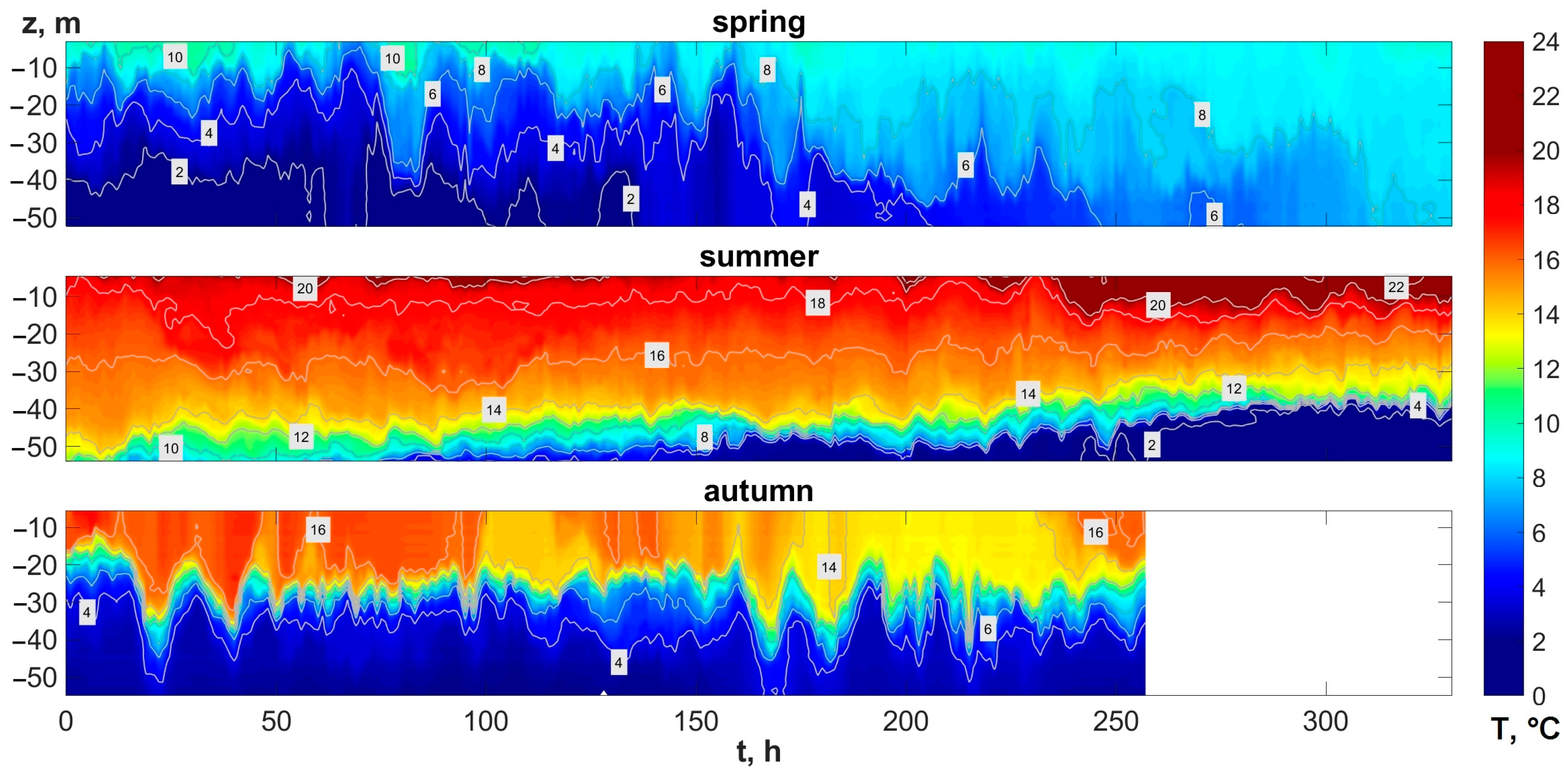
5. Examples of Using Temperature Sensors for Monitoring Hydrophysical Processes
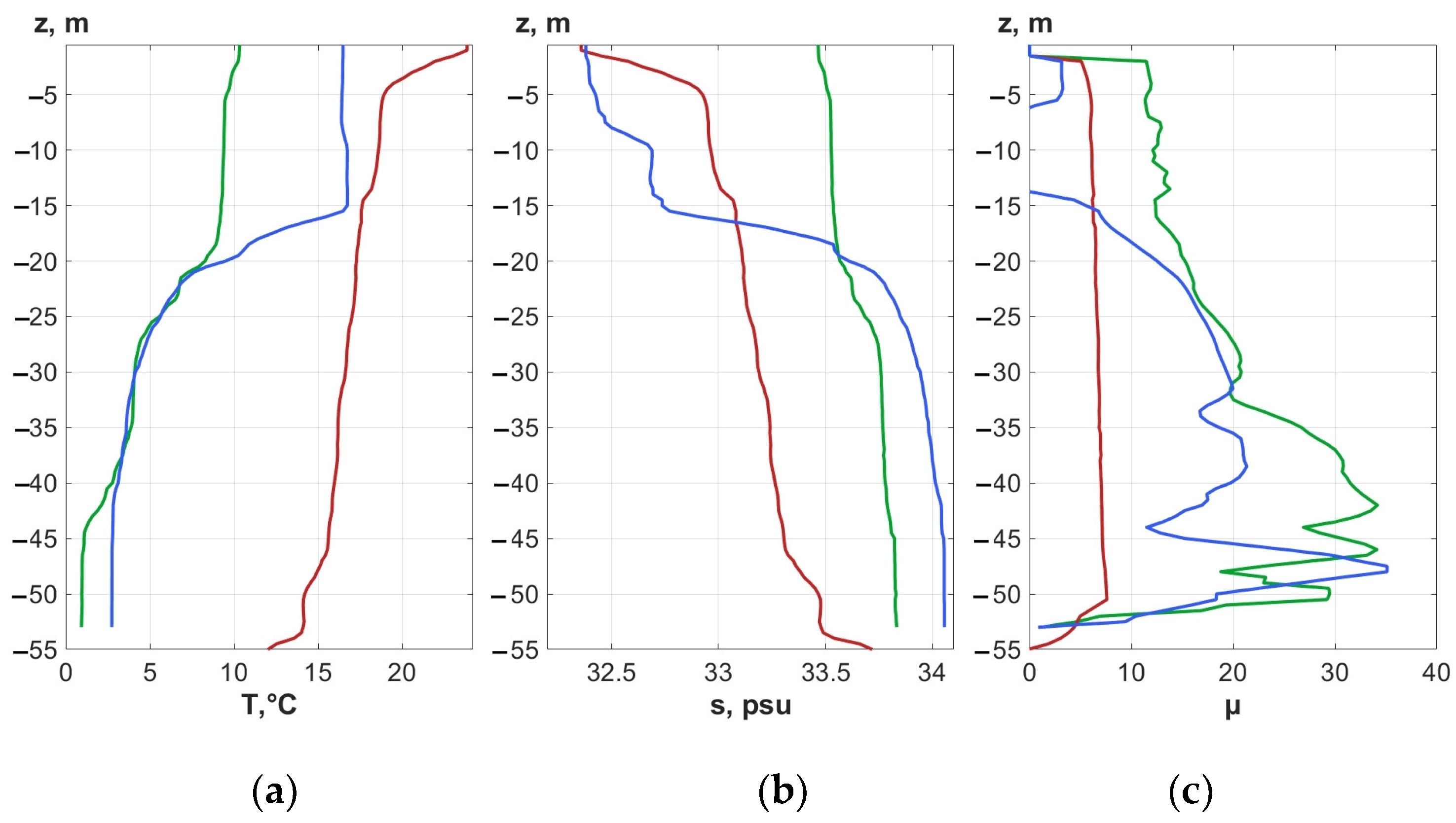
5.1. Space–Time Distributions of the Buoyancy Frequency
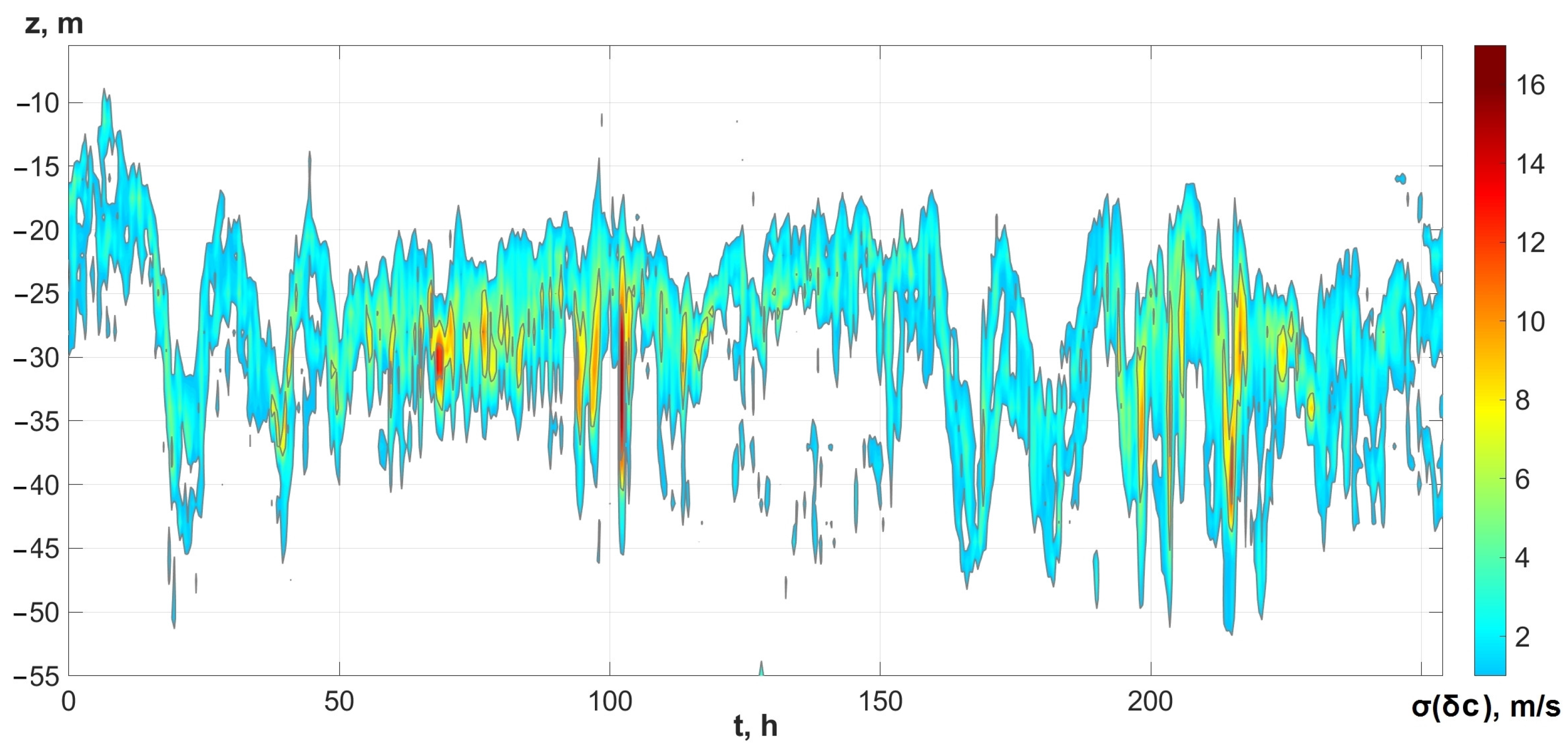
5.2. Fluctuations of Sound Speed in the Field of Internal Waves
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Thacker, W.C.; Lee, S.K.; Halliwell, J. Assimilating 20 Years of Atlantic XBT Data Into HYCOM: A First Look. Ocean Model. 2004, 7, 183–210. [Google Scholar] [CrossRef]
- Korotenko, K.A. A regression method for estimating salinity in the Ocean. Oceanology 2007, 47, 464–475. [Google Scholar] [CrossRef]
- Thacker, W.C. Estimating salinity to complement observed temperature: 1. Gulf of Mexico. J. Mar. Syst. 2007, 65, 224–248. [Google Scholar] [CrossRef]
- Thacker, W.C.; Sindlinger, L. Estimating salinity to complement observed temperature: 2. Northwestern Atlanic. J. Mar. Syst. 2007, 65, 249–267. [Google Scholar] [CrossRef]
- Shtokman, V.B. Principles of the theory of T–s curves as a method for study of the mixing and transformation of water masses. Problemy Artiki 1943, 1, 32–71. (In Russian) [Google Scholar]
- Mamayev, O.I. Temperature—Salinity Analysis of Word Ocean Water; Elsevier: Amsterdam, NY, USA, 1975. [Google Scholar]
- Stommel, H. Note on the Use of the T,S-Correlation for Dynamic Height Anomaly Calculations. J. Marine Res. 1947, 1, 85–92. [Google Scholar]
- Flierl, G.R. Correcting Expendable Bathythermograph (XBT) Data for Salinity Effects to Compute Dynamic Heights in Gulf Stream Rings. Deep-Sea Res. 1978, 25, 129–134. [Google Scholar] [CrossRef]
- Vossepoel, F.C.; Reynolds, R.W.; Miller, I. Use of Sea Level Observations to Estimate Salinity Variability in Tropical Pacific. J. Atmos. Ocean Technol. 1999, 16, 1401–1415. [Google Scholar] [CrossRef]
- Dorfschafer, G.S.; Tanajura, C.A.S.; Costa, F.B.; Santana, R.C. A new approach for estimating salinity in the Southwest Atlantic and its application in a data assimilation evaluation experiment. JGR Oceans. 2020, 125, e2020JC016428. [Google Scholar] [CrossRef]
- Hansen, D.V.; Thacker, W.C. Estimation of Salinity Profiles in the Upper Ocean. J. Geophys. Res. 1999, 104, 7921–7933. [Google Scholar] [CrossRef]
- Pivovarov, A.A.; Yaroshchuk, I.O.; Dolgikh, G.I.; Shvyrev, A.N.; Samchenko, A.N. An Autonomous Acoustic Logger and Its Application as Part of a Hydrophysical Complex. Instrum. Exp. Technol. 2021, 64, 468–473. [Google Scholar] [CrossRef]
- Pivovarov, A.A.; Yaroshchuk, I.O.; Shvyrev, A.N.; Samchenko, A.N. An autonomous low-frequency broadband hydroacoustic emitting station with electromagnetic transducer. Instrum. Exp. Technol. 2020, 63, 880–884. [Google Scholar] [CrossRef]
- Yaroshchuk, I.O.; Leont’ev, A.P.; Kosheleva, A.V.; Pivovarov, A.A.; Samchenko, A.N.; Stepanov, D.V.; Shvyryov, A.N. On intense internal waves in the coastal zone of the Peter the Great Bay (the Sea of Japan). Russian Meteorol. Hydrol. 2016, 41, 629–634. [Google Scholar] [CrossRef]
- Kukarin, V.F.; Liapidevskii, V.Y.; Khrapchenkov, F.F.; Yaroshchuk, I.O. Nonlinear internal waves in the shelf zone of the sea. Fluid Dyn. 2019, 54, 329–338. [Google Scholar] [CrossRef]
- Kosheleva, A.V.; Yaroshchuk, I.O.; Khrapchenkov, F.F.; Pivovarov, A.A.; Samchenko, A.N.; Shvyrev, A.N.; Korotchenko, R.A. Upwelling on the Narrow Shelf of the Sea of Japan in 2011. Fundam. I Prikl. Gidrofiz. 2021, 14, 31–42. [Google Scholar] [CrossRef]
- Gulin, O.E.; Yaroshchuk, I.O. Dependence of the mean intensity of a low-frequency acoustic field on the bottom parameters of a shallow sea with random volumetric water-layer inhomogeneities. Acoust. Phys. 2018, 64, 186–189. [Google Scholar] [CrossRef]
- Leontyev, A.P.; Yaroshchuk, I.; Smirnov, S.; Kosheleva, A.; Pivovarov, A.A.; Samchenko, A.; Shvyrev, A. A spatially distributed measuring complex for monitoring hydrophysical processes on the ocean shelf. Instrum. Exp. Technol. 2017, 60, 130–136. [Google Scholar] [CrossRef]
- Korotchenko, R.A.; Samchenko, A.N.; Yaroshchuk, I.O. The spationtemporal analysis of the bottom geomorphology in Peter the Great Bay of the Sea of Japan. Oceanology 2014, 54, 497–504. [Google Scholar] [CrossRef]
- Navrotsky, V.V.; Izergin, V.L.; Pavlova, E.P. Generation of internal waves near the shelf boundary. Dokl. Earth Sci. 2003, 388, 84–88. Available online: https://www.researchgate.net/publication/297414462 (accessed on 1 April 2023).
- Samchenko, A.; Dolgikh, G.; Yaroshchuk, I.; Kosheleva, A.; Pivovarov, A.; Novotryasov, V. Extreme Hydrometeorological Conditions of Sediment Waves’ Formation and Migration in Peter the Great Bay (The Sea of Japan). Water 2023, 15, 393. [Google Scholar] [CrossRef]
- Trusenkova, O.O.; Lobanov, V.B.; Lazaryuk, A.Y. Currents in the Southwestern Peter the Great Bay, the Sea of Japan, from the Stationary Wavescan Buoy Data in 2016. Oceanology 2022, 62, 310–323. [Google Scholar] [CrossRef]
- Dubina, V.A.; Lobanov, V.B.; Mitnik, L.M. Features of the surface circulation in the Northwestern Japan Sea from ERS synthetic aperture radar data. In Oceanography of the JAPAN Sea. Proc. CREAMS’2000 Int. Symp.; Danchenkov, M.A., Ed.; Dalnauka: Vladivostok, Russia, 2001; pp. 166–173. [Google Scholar]
- Operator’s Manual. Model SBE 19plus, SEACAT Profiler. Sea-Bird Electronics, Inc. USA. Available online: http://www.seabird.com (accessed on 1 April 2023).
- Operator’s Manual. Model XR-620 and XRX-620. Richard Brancker Research Ltd., Canada. Available online: www.rbr-global.com (accessed on 1 April 2023).
- IOC; SCOR; IAPSO. The International Thermodynamic Equation of Seawater—2010: Calculation and Use of Thermodynamic Properties; Intergovernmental Oceanographic Commission, Manuals and Guides; UNESCO: Paris, France, 2010; No. 56. [Google Scholar]
- Arkhipkin, V.S.; Lazaryuk, A.Y.; Levashov, D.E.; Ramazin, A.N. Oceanology. Instrumental Methods for Measuring the Main Parameters of Sea Water; MAKS Press: Moskva, Russia, 2009; 335p. (In Russian) [Google Scholar]
- Lazaryuk, A.Y. Response functions of the temperature and conductivity sensors of CTD profilers. Oceanology 2008, 48, 872–875. [Google Scholar] [CrossRef]
- Lazaryuk, A.; Ponomarev, V.; Salyuk, A. Mismatching of raw MARK-IIIC CTD data. Pac. Oceanogr. 2008, 4, 59–62. [Google Scholar]
- Trump, C.L. Effects of ship’s roll on the quality of precision CTD data. Deep-Sea Res. 1983, 30, 1173–1183. [Google Scholar] [CrossRef]
- Emery, W.J.; Thomson, R.E. Data Analysis Methods in Physical Oceanography, 3rd ed.; Elsevier: Amsterdam, The Netherlands, 2014; 716p. [Google Scholar] [CrossRef]
- The Practical Salinity Scale 1978 and the International Equation of State of Seawater 1980. In UNESCO Technical Papers in Marine Science; UNESCO: Paris, France, 1981; No. 36; pp. 13–21. Available online: https://www.jodc.go.jp/jodcweb/info/ioc_doc/html/UNESCO_Tech.htm (accessed on 1 April 2023).
- UNESCO Technical Papers in Marine Science. The Acquisition, Calibration, and Analysis of CTD Data; UNESCO: Paris, France, 1988; No. 54; Available online: https://www.jodc.go.jp/jodcweb/info/ioc_doc/html/UNESCO_Tech.htm (accessed on 1 April 2023).
- Lueck, R.G.; Picklo, J.J. Thermal inertia of conductivity cells: Observations with a Sea-Bird Cell. J. Atmos. Oceanic Technol. 1990, 7, 756–768. [Google Scholar] [CrossRef]
- Katsnelson, B.; Petnikov, V.; Lynch, J. Fundamentals of Shallow Water Acoustics; Springer: New York, NY, USA, 2012; 540p. [Google Scholar] [CrossRef]
- Bennett, A.S.; Huaide, T. CTD time-constant correction. Deep-Sea Res. 1986, 33, 1425–1438. [Google Scholar] [CrossRef]
- Operator’s Manual. SBE Data Processing 7.23.2. Available online: http://www.seabird.com (accessed on 1 April 2023).
- Halverson, M.; Jackson, J.; Richards, C.; Melling, H.; Brunsting, R.; Dempsey, M.; Gatien, G.; Hamilton, A.; Jacob, W.; Zimmerman, S.; et al. Guidelines for processing RBR CTD profiles. Can. Technol. Rep. Hydrogr. Ocean Sci. 2017, 314, iv + 38 p. [Google Scholar]
- Bendat, J.S.; Piersol, A.G. Random Data: Analysis and Measurement Procedures, 4th ed.; Wiley: Hoboken, NJ, USA, 2010; 640p. [Google Scholar]
- Giles, A.B.; McDougall, T.J. Two methods for the reduction of salinity spiking of CTD’s. Deep-Sea Res. 1986, 33, 1253–1274. [Google Scholar] [CrossRef]
- Millard, R.; Toole, J.; Swartz, M. A fast responding temperature measurement system for CTD application. IEEE J. Ocean. Eng. 1980, 7, 413–427. [Google Scholar] [CrossRef]
- Smirnov, G.V.; Eremeev, V.N.; Ageev, M.D.; Korotaev, G.K.; Yastrebov, V.S.; Motyzhev, S.V. Oceanology: Methods of Oceanographic Study; Nayka: Moscow, Russia, 2005. (In Russian) [Google Scholar]
- Post-Processing RBR Data with RSKtools; RSKtools v3.5.0. RBR Ltd.: Ottawa ON, Canada, 2020. Available online: https://rbr-global.com/wp-content/uploads/2020/06/PostProcessing.pdf (accessed on 1 April 2023).
- RSKtools 3.5.3. Available online: http://www.rbr-global.com/support/matlab-tools (accessed on 1 April 2023).
- Digital Typhoon. Available online: http://agora.ex.nii.ac.jp/digital-typhoon (accessed on 25 March 2023).
- Talipova, T.G.; Pelinovsky, E.N.; Kurkin, A.A.; Kurkina, O.E. Modeling the Dynamics of Intense Internal Waves on the Shelf. Izv. Atmos. Ocean. Phys. 2014, 50, 630–637. [Google Scholar] [CrossRef]
- Badiey, M.; Wan, L.; Lynch, J.F. Statistics of nonlinear internal waves during the Shallow Water 2006 Experiment. J. Atmos. Ocean. Technol. 2016, 33, 839–846. [Google Scholar] [CrossRef]
- Colosi, J.A.; Kumar, N.; Suanda, S.H.; Freismuth, T.M.; MacMahan, J.H. Statistics of internal tide bores and internal solitary waves observed on the continental shelf of Point Sal, California. J. Phys. Oceanogr. 2018, 48, 123–143. [Google Scholar] [CrossRef]
- Ivanov, V.A.; Pelinovsky, E.N.; Talipova, T.G.; Troitskaya, Y.I. Statistical estimations of the parameters of non-linear long internal waves off the South Crimea in the Black Sea. Phys. Oceanogr. 1995, 6, 253–261. [Google Scholar] [CrossRef]
- Dijkstra, H.A. Dynamical Oceanography; Springer: Berlin/Heidelberg, Germany, 2008. [Google Scholar] [CrossRef]
- Flatte, S.; Dashen, R.; Munk, W.; Watson, K.; Zachariasen, F. Sound Transmission through a Fluctuating Ocean; Cambridge U.P.: Cambridge, UK, 1979; 320p. [Google Scholar]
- Kosheleva, A.; Yaroshchuk, I.; Shvyrev, A.; Samchenko, A.; Pivovarov, A.; Gulin, O.; Korotchenko, R.; Yaroshchuk, E. Specific features of high-frequency component of background internal gravity waves on the shelf of the Sea of Japan. FEFU Sch. Eng. Bull. 2020, 43, 96–105. (In Russian) [Google Scholar] [CrossRef]
- Munk, W.H.; Zachariasen, F. Sound propagation through a fluctuating stratified ocean: Theory and observation. J. Acoust. Soc. Am. 1976, 59, 818–838. [Google Scholar] [CrossRef]
- Liapidevskii, V.Y.; Khrapchenkov, F.F.; Chesnokov, A.A.; Yaroshchuk, I.O. Modeling of unsteady geophysical processes on the shelf of the Sea of Japan. Fluid Dyn. 2022, 57, 55–65. [Google Scholar] [CrossRef]
- Trusenkova, O.O.; Ostrovskii, A.G.; Lazaryuk, A.Y.; Lobanov, V.B. Evolution of the Thermohaline Stratification in the Northwestern Sea of Japan: Mesoscale Variability and Intra-annual Fluctuations. Oceanology 2021, 61, 319–328. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| ∂s/∂T = 0.6–1.3 psu/°C | ∂ρ/∂T = −0.3–0 [g/cm3]/°C | ∂c/∂T = 2.6–4.4 [m/s]/°C |
| ∂s/∂E = 0.7–1.3 psu/[mS/cm] | ∂ρ/∂s = 0.7–0.8 [g/cm3]/psu | ∂c/∂s = 1–1.3 [m/s]/psu |
| ∂s/∂p = 0.0005 psu/dbar | ∂ρ/∂p = 0.0046 [g/cm3]/dbar | ∂c/∂p = 0.016 [m/s]/dbar |
| CTD Profiler | Seawater Parameters | Random Errors | Dynamic Errors |
|---|---|---|---|
| SBE 19plus | T | 0.007 °C | 0.5 °C |
| s | 0.012 psu | 0.5 psu | |
| ρ | 10−5 g/cm3 | 40 × 10−5 g/cm3 | |
| c | 0.03 m/s | 2 m/s | |
| RBR XR-620 | T | 0.004 °C | 0.2 °C |
| s | 0.008 psu | 0.5 psu | |
| ρ | 0.6 × 10−5 g/cm3 | 20 × 10−5 g/cm3 | |
| c | 0.015 m/s | 1 m/s |
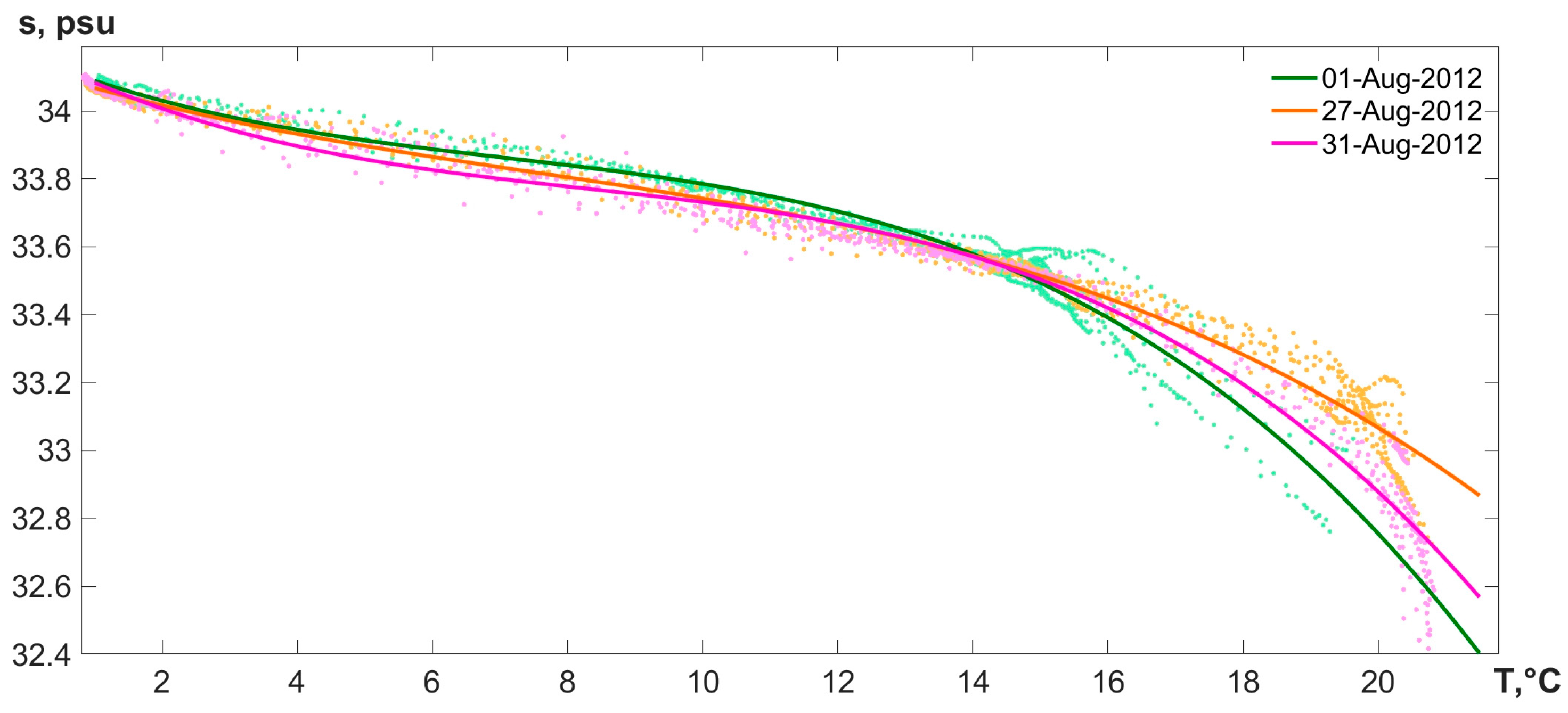
| CTD Data | 1 August 2012 | 27 August 2012 | 31 August 2012 | |
|---|---|---|---|---|
| Polynomial | ||||
| 1 August 2012 | 0.03 | 0.09 | 0.08 | |
| 27 August 2012 | 0.05 | 0.04 | 0.09 | |
| 31 August 2012 | 0.04 | 0.08 | 0.06 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yaroshchuk, I.; Kosheleva, A.; Lazaryuk, A.; Dolgikh, G.; Pivovarov, A.; Samchenko, A.; Shvyrev, A.; Gulin, O.; Korotchenko, R. Estimation of Seawater Hydrophysical Characteristics from Thermistor Strings and CTD Data in the Sea of Japan Shelf Zone. J. Mar. Sci. Eng. 2023, 11, 1204. https://doi.org/10.3390/jmse11061204
Yaroshchuk I, Kosheleva A, Lazaryuk A, Dolgikh G, Pivovarov A, Samchenko A, Shvyrev A, Gulin O, Korotchenko R. Estimation of Seawater Hydrophysical Characteristics from Thermistor Strings and CTD Data in the Sea of Japan Shelf Zone. Journal of Marine Science and Engineering. 2023; 11(6):1204. https://doi.org/10.3390/jmse11061204
Chicago/Turabian StyleYaroshchuk, Igor, Alexandra Kosheleva, Alexander Lazaryuk, Grigory Dolgikh, Alexander Pivovarov, Aleksandr Samchenko, Alex Shvyrev, Oleg Gulin, and Roman Korotchenko. 2023. "Estimation of Seawater Hydrophysical Characteristics from Thermistor Strings and CTD Data in the Sea of Japan Shelf Zone" Journal of Marine Science and Engineering 11, no. 6: 1204. https://doi.org/10.3390/jmse11061204
APA StyleYaroshchuk, I., Kosheleva, A., Lazaryuk, A., Dolgikh, G., Pivovarov, A., Samchenko, A., Shvyrev, A., Gulin, O., & Korotchenko, R. (2023). Estimation of Seawater Hydrophysical Characteristics from Thermistor Strings and CTD Data in the Sea of Japan Shelf Zone. Journal of Marine Science and Engineering, 11(6), 1204. https://doi.org/10.3390/jmse11061204