

Intervehicle Security-Based Robust Neural Formation Control for Multiple USVs via APS Guidance





Abstract
:1. Introduction
- (1)
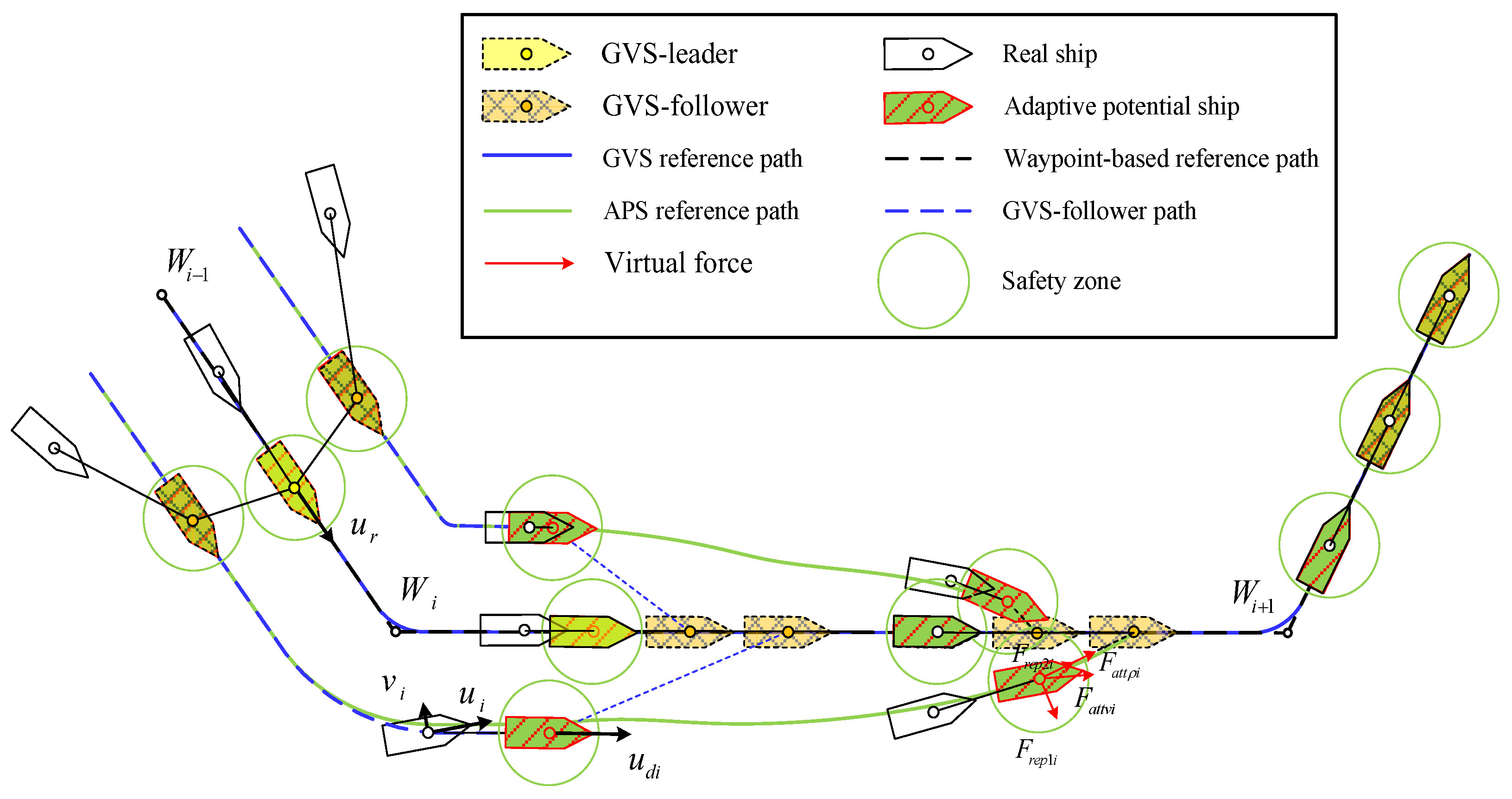
- A novel adaptive potential ship (APS)-based guidance principle is developed to implement the real-time path planning of formation keeping and switching, whereby the intervehicle security can be guaranteed in the meantime. In this principle, the leader and followers are all assigned as guidance virtual ships (GVSs) to generate the references for USVs. Regarding the operation of the formation switch, the formation structure of the GVS would be transformed. By employing the APF method, the APSs can be derived according to the relative attitudes of USV-GVS and USV-USV, which always guide USVs toward the reference of GVSs. Different from the existing results, the proposed guidance can make the leader–follower formation a flexible structure. Thus, the APS guidance provides a new method to deal with the formation switch and intervehicle security problem.
- (2)
- In order to lower the energy consumption, this paper focuses on the precise estimation of marine environment disturbances. A robust adaptive formation control algorithm with a NNs-based DOB is proposed. By estimating the disturbances, the USV is able to distribute outputs as the variation in the marine environment. Compared with the former DOB, the NNs-based DOB requires fewer model parameters’ data information to estimate the disturbances. Different from [10,25], the observational objects in this paper are much more complex and disordered. The disturbances in nautical practice are illustrated to verify the feasibility of the NNs-based DOB.
2. Problem for Formulation and Preliminaries
2.1. USV Formation Modeling
2.2. RBF-NNs
3. APS-Based Guidance Principle with Intervehicle Security
3.1. The Basis Framework of Guidance Principle
3.2. Design of the APS Guidance and Formation Switch Principle
4. Controller Design
4.1. Adaptive Formation Control Design
4.2. NNs-Based Disturbance Observer Design
4.3. Stability Analysis
5. Numerical Experiment
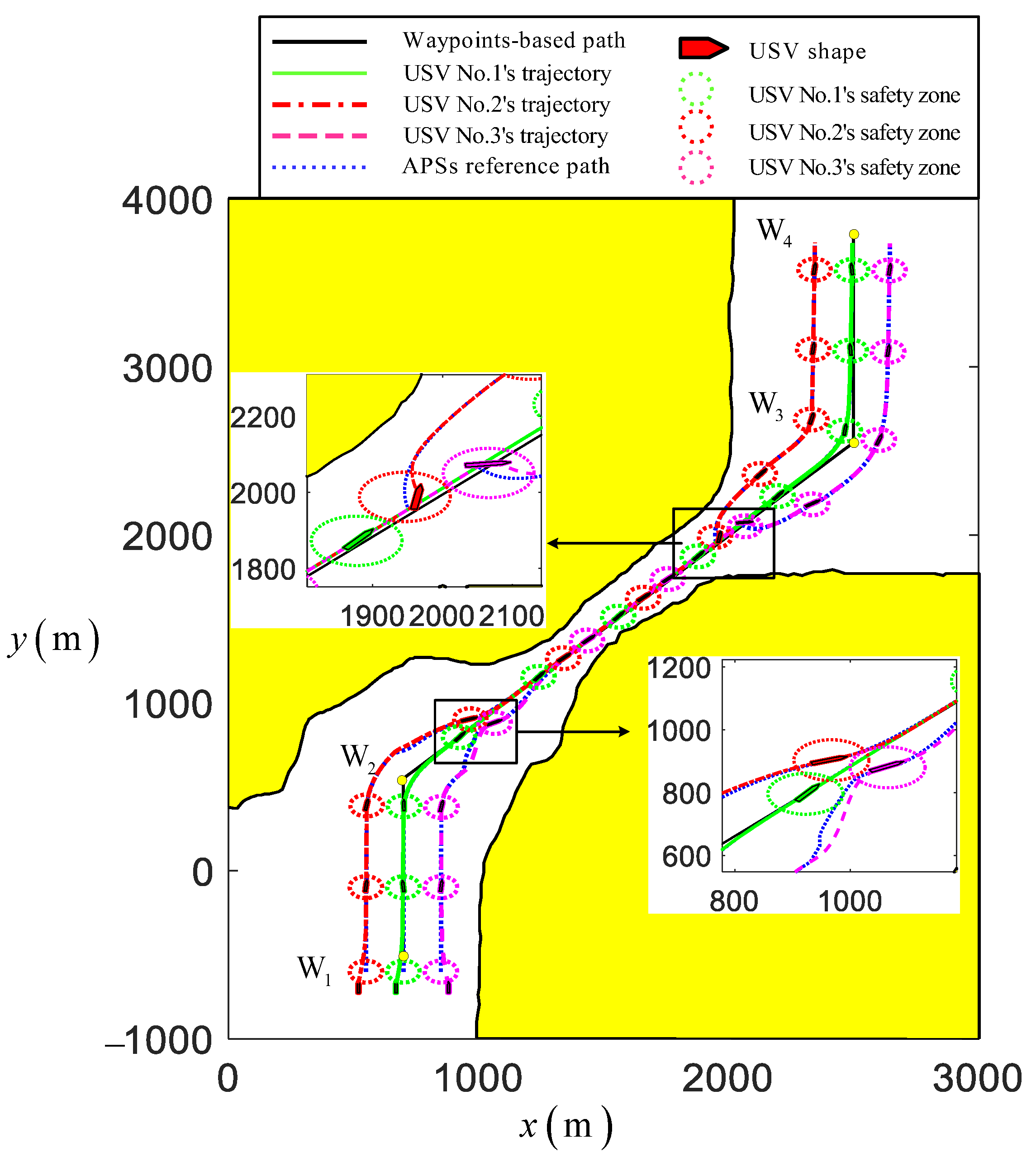
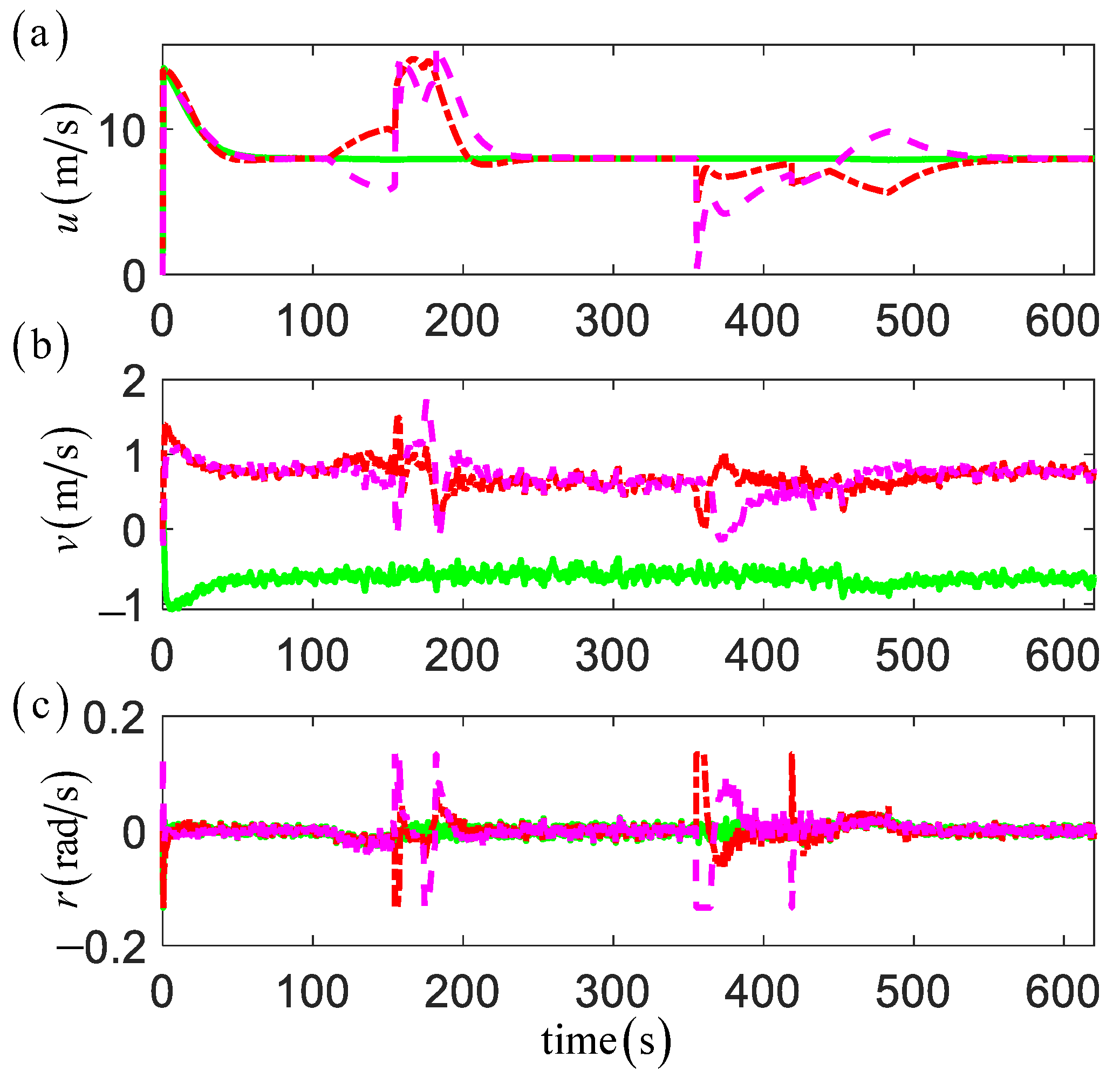
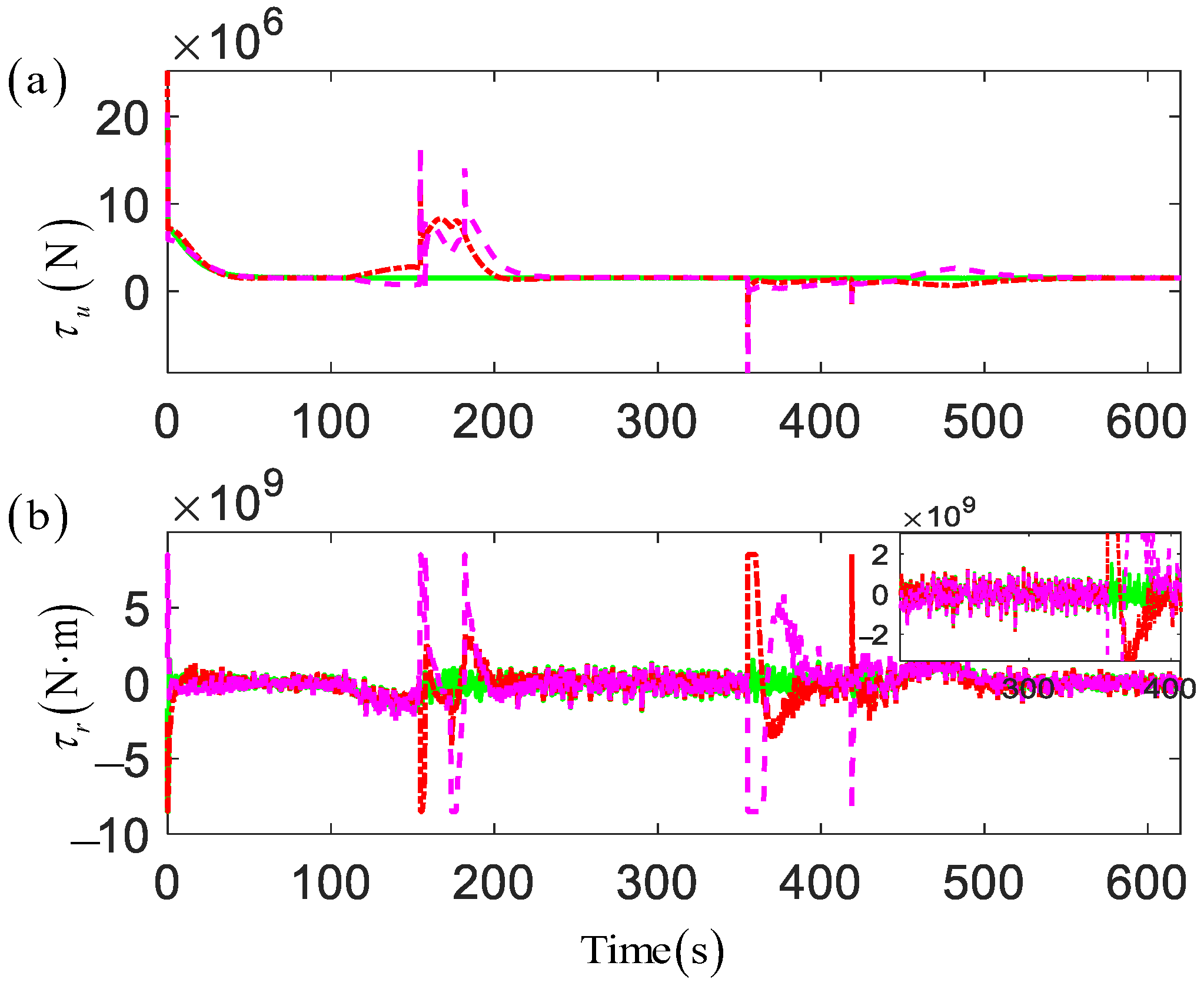
5.1. Experiment under Restricted Water Area and Marine Environment
5.2. Comparative Experiment
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Cui, R.; Ge, S.S.; How, B.V.E.; Choo, Y.S. Leader-follower formation control of underactuated AUVs with leader position measurement. In Proceedings of the IEEE International Conference on Robotics and Automation, Kobe, Japan, 12–17 May 2009; pp. 979–984. [Google Scholar]
- Ren, W.; Beard, R.; Atkins, E. A survey of consensus problems in multi-agent coordination. In Proceedings of the American Control Conference, Portland, OR, USA, 8–10 June 2005; pp. 1859–1864. [Google Scholar]
- Ren, W.; Beard, R.W. Formation feedback control for multiple spacecraft via virtual structures. Control. Theory Appl. 2004, 151, 357–368. [Google Scholar]
- Balch, T.; Arkin, R. Behavior-based formation control for multirobot teams. IEEE Trans. Robot. Autom. 1998, 14, 926–939. [Google Scholar]
- Zhang, G.; Liu, S.; Zhang, X.; Zhang, W. Event-Triggered Cooperative Formation Control for Autonomous Surface Vehicles Under the Maritime Search Operation. IEEE Trans. Intell. Transp. Syst. 2022, 23, 21392–21404. [Google Scholar]
- Liu, L.; Wang, D.; Peng, Z.; Li, T.; Chen, C.L.P. Cooperative Path Following Ring-Networked Under-Actuated Autonomous Surface Vehicles: Algorithms and Experimental Results. IEEE Trans. Cybern. 2020, 50, 1519–1529. [Google Scholar]
- Wang, Y.; Liu, Y.; Li, X.; Liang, Y. Distributed consensus tracking control based on state and disturbance observations for mixed-order multiagent mechanical systems. J. Frankl. Inst. 2023, 360, 943–963. [Google Scholar]
- Liu, C.; Hu, Q.; Sun, T. Distributed formation control of underactuated ships with connectivity preservation and collision avoidance. Ocean. Eng. 2022, 263, 112350. [Google Scholar]
- Du, X.; Li, W.; Xiao, J.; Chen, Z. Time-Varying Group Formation with Adaptive Control for Second-Order Multi-Agent Systems. IEEE Access 2022, 10, 45337–45346. [Google Scholar]
- Zhang, G.; Huang, C.; Li, J.; Zhang, X. Constrained coordinated path-following control for underactuated surface vessels with the disturbance rejection mechanism. Ocean. Eng. 2020, 196, 106725. [Google Scholar]
- Liang, X.; Qu, X.; Wang, N.; Li, Y.; Zhang, R. Swarm control with collision avoidance for multiple underactuated surface vehicles. Ocean. Eng. 2019, 191, 106516. [Google Scholar]
- Chen, L.; Hopman, H.; Negenborn, R.R. Distributed Model Predictive Control for cooperative floating object transport with multi-vessel systems. Ocean. Eng. 2019, 191, 106515. [Google Scholar]
- Shojaei, K. Observer-based neural adaptive formation control of autonomous surface vessels with limited torque. Robot. Auton. Syst. 2016, 78, 83–96. [Google Scholar]
- Huang, C.; Zhang, X.; Zhang, G. Adaptive neural finite-time formation control for multiple underactuated vessels with actuator faults. Ocean. Eng. 2021, 222, 108556. [Google Scholar]
- Zhang, G.; Liu, S.; Li, J.; Zhang, X. LVS guidance principle and adaptive neural fault-tolerant formation control for underactuated vehicles with the event-triggered input. Ocean. Eng. 2021, 229, 108927. [Google Scholar]
- Khatib, O. Real-time obstacle avoidance for manipulators and mobile robots. In Proceedings of the IEEE International Conference on Robotics and Automation, St. Louis, MO, USA, 25–28 March 1985; Volume 2, pp. 500–505. [Google Scholar]
- Zhang, G.; Han, J.; Li, J.; Zhang, X. APF-based intelligent navigation approach for USV in presence of mixed potential directions: Guidance and control design. Ocean. Eng. 2022, 260, 111972. [Google Scholar]
- Zhang, G.; Zhang, X. Concise Robust Adaptive Path-Following Control of Underactuated Ships Using DSC and MLP. IEEE J. Ocean. Eng. 2014, 39, 685–694. [Google Scholar]
- Zhang, G.; Li, J.; Jin, X.; Liu, C. Robust Adaptive Neural Control for Wing-Sail-Assisted Vehicle via the Multiport Event-Triggered Approach. IEEE Trans. Cybern. 2022, 52, 12916–12928. [Google Scholar]
- Li, J.; Zhang, G.; Shan, Q.; Zhang, W. A Novel Cooperative Design for USV-UAV Systems: 3D Mapping Guidance and Adaptive Fuzzy Control. IEEE Trans. Control. Netw. Syst. 2022, in press. [Google Scholar] [CrossRef]
- Zhang, G.; Zhang, C.; Lang, L.; Zhang, W. Practical constrained output feedback formation control of underactuated vehicles via the autonomous dynamic logic guidance. J. Frankl. Inst. 2021, 358, 6566–6591. [Google Scholar]
- Lin, F.; Zhang, J.; Jia, X.; Zhou, X. Adaptive event-triggering distributed filter of positive markovian jump systems based on disturbance observer. J. Frankl. Inst. 2023, 360, 2507–2537. [Google Scholar]
- Do, K. Practical control of underactuated ships. Ocean. Eng. 2010, 37, 1111–1119. [Google Scholar]
- Du, J.; Hu, X.; Krstic, M.; Sun, Y. Robust dynamic positioning of ships with disturbances under input saturation. Automatica 2016, 73, 207–214. [Google Scholar]
- Lu, Y.; Zhang, G.; Sun, Z.; Zhang, W. Robust adaptive formation control of underactuated autonomous surface vessels based on MLP and DOB. Nonlinear Dyn. 2018, 94, 503–519. [Google Scholar]
- Fossen, T.I. Handbook of Marine Craft Hydrodynamics and Motion Control; John Wiley & Sons: Hoboken, NJ, USA, 2011. [Google Scholar]
- Li, J.H.; Lee, P.M.; Jun, B.H.; Lim, Y.K. Point-to-point navigation of underactuated ships. Automatica 2008, 44, 3201–3205. [Google Scholar]
- Ren, B.; San, P.P.; Ge, S.S.; Lee, T.H. Adaptive dynamic surface control for a class of strict-feedback nonlinear systems with unknown backlash-like hysteresis. In Proceedings of the American Control Conference, St. Louis, MO, USA, 10–12 June 2009; pp. 4482–4487. [Google Scholar]
- Li, Y.; Tong, S. Adaptive neural networks prescribed performance control design for switched interconnected uncertain non-linear systems. IEEE Trans. Neural Netw. Learn. Syst. 2017, 29, 3059–3068. [Google Scholar]
- Zhang, G.; Zhang, X. A novel DVS guidance principle and robust adaptive path-following control for underactuated ships using low frequency gain-learning. ISA Trans. 2015, 56, 75–85. [Google Scholar]
- Li, T.S.; Wang, D.; Feng, G.; Tong, S.C. A DSC Approach to Robust Adaptive NN Tracking Control for Strict-Feedback Nonlinear Systems. IEEE Trans. Syst. Man Cybern. Part B 2010, 40, 915–927. [Google Scholar]
- Zhang, X.; Jia, X.; Wang, X. A kind of transfigured loop shaping controller and its application. Autom. Control. Comput. Sci. 2001, 35, 20–25. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, G.; Yin, S.; Huang, C.; Zhang, W. Intervehicle Security-Based Robust Neural Formation Control for Multiple USVs via APS Guidance. J. Mar. Sci. Eng. 2023, 11, 1020. https://doi.org/10.3390/jmse11051020
Zhang G, Yin S, Huang C, Zhang W. Intervehicle Security-Based Robust Neural Formation Control for Multiple USVs via APS Guidance. Journal of Marine Science and Engineering. 2023; 11(5):1020. https://doi.org/10.3390/jmse11051020
Chicago/Turabian StyleZhang, Guoqing, Shilin Yin, Chenfeng Huang, and Weidong Zhang. 2023. "Intervehicle Security-Based Robust Neural Formation Control for Multiple USVs via APS Guidance" Journal of Marine Science and Engineering 11, no. 5: 1020. https://doi.org/10.3390/jmse11051020
APA StyleZhang, G., Yin, S., Huang, C., & Zhang, W. (2023). Intervehicle Security-Based Robust Neural Formation Control for Multiple USVs via APS Guidance. Journal of Marine Science and Engineering, 11(5), 1020. https://doi.org/10.3390/jmse11051020