1. Introduction
The problem of the localization of the field at a given point of a regular ocean waveguide based on the principle of phase conjugation (wavefront reversal (WFR)) was apparently first discussed in [
1,
2]. The WFR spatial focusing consists of recording the sound field from a distant probe source by a receiving and transmitting vertical antenna (RTA), reversing the recording signals by phase conjugation and propagating the reversed signal back in the ocean waveguide. As a result, the sound field is spatially focused by WFR at the probe source location.
The studies of WFR in ocean waveguides were developed in [
3,
4,
5,
6,
7,
8,
9,
10,
11,
12,
13,
14,
15,
16]. In [
3], the behavior of acoustic phase-conjugate arrays was illustrated in several examples, some highly idealized and some more realistic. The effects of apertures size and inhomogeneities in the propagation medium were treated for both the near-field and far-field regions. It was concluded that phase-conjugate arrays offer an attractive approach to some long-standing problems in underwater acoustics. In [
4], the theoretical narrow-band performance of acoustic phase-conjugate arrays in the presence of static and dynamic random media was presented. For a static random medium, analytical formulas were derived for the mean focus field of a Gaussian-shaded volumetric phase-conjugate array. In [
5,
6], the temporal and spatial focusing properties of time-reversal mirrors were studied in a waveguide. The width of the focal spot and the spatial and temporal sidelobe levels were experimentally and numerically analyzed with respect to the characteristics of the waveguide. In [
7], an experiment conducted in the Mediterranean Sea in April 1996 demonstrated that a time-reversal mirror (or phase conjugate array) can be implemented to spatially and temporally refocus an incident acoustic field back to its origin. In [
8], the waveguide time-reversal mirror technique was extended to refocus at ranges other than that of the probe source. This procedure was based on the acoustic-field-invariant property in the coordinates of frequency and range in an oceanic waveguide. In [
9], an example of active focusing within the waveguide using the first invariant of the time-reversal operator was presented, showing the enhanced focusing capability. Furthermore, the localization of the scatterers in the water column was obtained using a range-dependent acoustic model. In [
10], a time-reversal mirror refocused back at the original probe source position. The goal was to refocus at different positions without model-based calculations. In [
11], a method was introduced for using a pair of RTAs to produce time-reversal focusing fields at any location in a range-independent shallow ocean waveguide. In [
13], the problems of the structure formation of the acoustic field in multimode waveguides were considered in more detail. In [
14], the control of localized fields in multimode waveguides on the basis of interference invariance was proposed. The efficiency of sound field focusing and scanning for long ranges and low frequencies was analyzed in [
15]. Reverberation control by sound field focusing in a shallow water waveguide was considered in [
16].
The practical needs of the remote sensing of the inhomogeneities of the oceanic environment lead to the task of controlling the focusing (localization) of sound fields in planar multimode shallow water waveguides. The application of the traditional approach to scanning the ocean with a focal spot at range and depth, combined with the rearrangement of the field distribution at the aperture, leads to a considerable complication and an increase in the cost of large-scale experiments. This situation forces us to investigate and test fundamentally new approaches to this problem that are realistic from an experimental point of view. The principle of interference invariance, for example, fulfills this goal [
17,
18,
19,
20,
21]. This principle is based on the idea that the phase changes of a group of similar modes caused by variations in the observation conditions can be compensated by shifting the radiation frequency. The theory of interference invariance was constructed and confirmed by numerous experiments with respect to a point source. Its generalization to the case of an extended vertical antenna, where the same type of mode groups is excited differently at different horizons, is not obvious and deserves a detailed study. In this paper, which is a further development of the ideas of [
17,
18,
19,
20,
21], the results of the numerical simulation of the control of localized wavefields by adjusting the radiation frequency without changing the distribution of the initial field along the aperture are presented.
The aim of the paper was to present the results of a study of the possibility and effectiveness of focusing control based on WFR by frequency tuning without changing the distribution of the reversed field at the RTA. The focal spot controlling at long distances from the RTA (up to 100 km) was analyzed. As is known, low-frequency sound waves propagate over long distances. The low-frequency sound field (100–300 Hz) was considered in our paper. The focal spot controlling method was based on waveguide dispersion, which makes it possible to equalize changes in the phase modes by changing the frequency of radiation. The paper consists of five sections.
Section 1 is the Introduction. In
Section 2, the general principles of focusing the sound field based on the WFR are considered. The parameters of the focal spots that are used to characterize the quality of the localization of the wave field are determined. The results of a comparative analysis of the localization of the sound field in the summer waveguide and winter waveguide are presented. In
Section 3, the comparative analysis structure of the interferogram and the hologram of the sound field in the vicinity of the focal spot in the summer waveguide and winter waveguide is considered. In
Section 4, the possibility of scanning a focal spot by frequency tuning is analyzed. The nature of the radiation frequency adjustment is established. The effect of the spatial repeatability of focal spots is analyzed.
Section 5 gives the conclusion.
2. Sound Field Focusing Parameters in Shallow Water Waveguide
Let us consider an oceanic waveguide in a Cartesian coordinate system (
) as a layer of water bounded in depth by the sea surface (
) and the flat bottom surface (
). The oceanic waveguide model and problem geometry are shown in
Figure 1. The depth-dependent refractive index and density of the water layer are
and
. The constant refractive index and density of the bottom are
and
. The parameter
is determined by the absorption properties of the bottom.
The
receiving and transmitting antenna (RTA) is located at the coordinate origin (
) (see
Figure 1). It consists of non-directional point receiving and transmitting elements that are equidistant at depths
,
, where
is the antenna element spacing and
is the number of antenna elements. The upper element is located on the surface,
, and the lower element of the antenna is on the bottom,
. It was assumed that the point monochromatic probe source is located in the
reference point (RP) of the field focus
.
Let us describe the distribution of the sources in the case of focusing the array field on the RP
. We represent the vertical field distribution with frequency
at the coordinate origin generated by a point source at RP
in terms of a finite sum of normal modes of a discrete spectrum:
where
Here,
and
are the water density and the sound speed at distance
and depth
,
and
are the eigenfunctions and the propagation factor of the
m-th mode, while
M is the number of propagating modes. In Equation (
2), the power of the source is assumed to be equal to one. The principle of phase conjugation assumes that the sound field radiated from the
i-th element of the antenna array is phase conjugate to the received sound field
, Equation (
1), at the
i-th element point, i.e., the radiated sound field is
In the absence of interactions between the array elements, the expression for the proportionality coefficient
can be obtained from the normalization condition
given by Equation (
3) in the form:
Such a phase distribution of sources produces a conjugate field, i.e., a field converging to the RP
. Let us sum up the fields of the point sources. In this case, the radiation field of the array
can be reduced to the following form using Equations (
3) and (
4):
where
with
The focusing of the field by
wavefront reversal (WFR) at frequency
at the reference point is as follows. The field
generated by the probe source is registered at the RTA at frequency
. A source distribution is generated at the RTA aperture that is phase-conjugate with the received field
. The coefficient is then assumed to be
. Such a distribution of the field at the aperture of the RTA excites an inverted wave localized at the point
:
The complex sound pressure of RP,
in points of RTA elements,
,
, can be written as follows:
Thus,
Let us now consider the parameters of sound field focusing. The quality of the localization of the field is determined by the focusing factor
g, the bandwidth
, and the geometrical dimensions of the focal peak: horizontally
and vertically
(see
Figure 2). The focusing factor characterizes the excess of the mean (background) level
near the focal spot level at frequency
:
The magnitude of the focusing factor characterizes the contrast of the focal spot in relation to the sound field. The value of the average level of the sound field is determined by the neighborhood in the plane of the waveguide:
The width of the band and the geometrical dimensions of the focal spot characterizing its blur are determined by a fixed level from the maximum value of the field near the localization point. Another parameter of the sound field focusing is
, the absolute value of the difference between
(the depth of the reference point
Q) and
(the depth of the interference maximum nearest
Q):
Let us consider the characteristics of field focusing by WFR in a shallow water waveguide. We considered the influence of water layer stratification and absorption at the waveguide bottom on the quality of sound field focusing for different ranges and depths of the localization point
Q and for different sound frequencies. As an example, we considered a shallow water waveguide with parameters corresponding to the experiments of JUSREX (1992) [
22] and SWARM (1995) [
23]. The water stratifications of these experiments are shown in
Figure 3.
Figure 3a corresponds to JUSREX (1992).
Figure 3b corresponds to SWARM (1995). Curve 1 in
Figure 2 is the water stratification in the winter season—winter waveguide (WW). Curve 2 in
Figure 2 is the water stratification in the summer season—summer waveguide (SW). The water layer depth is
m. Bottom parameters:
m/s,
g/cm
3,
. RTA parameters:
m,
. Sound radiation frequencies:
Hz,
Hz.
Let us consider the following reference points:
, where
km,
km,
km,
m,
m, and
m. The results of the numerical modeling for the reference points
are shown in
Figure 4,
Figure 5,
Figure 6,
Figure 7 and
Figure 8.
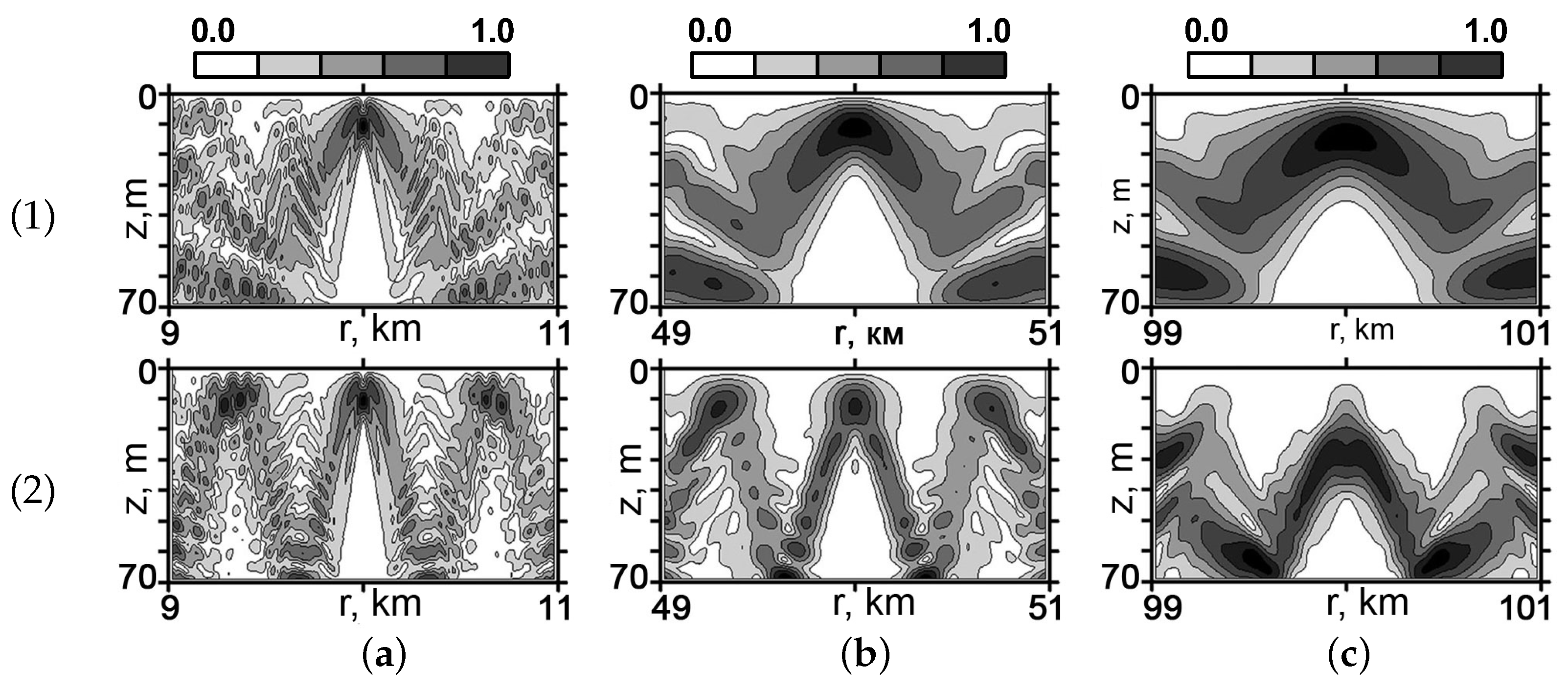
Figure 4 and
Figure 5 show the brightness patterns of the normalized sound field
in the vicinity of the localization point
m) for the WW and SW at different distances (
km,
km,
km) from the RTA.
Figure 4 corresponds to
Hz and
Figure 5 to
Hz.
As can be seen from
Figure 4 and
Figure 5, as the distance from the localization point of the field
increases, the longitudinal and transverse dimensions of the focal spot increase. For example, for the SW at a distance of
km at a frequency of
Hz, the dimensions of the focal spot are
m and
m. For a frequency of
Hz:
m and
m. For a distance of
km and a frequency of
Hz, the dimensions of the focal spot are
m and
m. For a frequency of
Hz:
m and
m.
A similar behavior of the focal spot parameters was also observed for the WW. This effect is explained by the manifestation of bottom absorption, by which, with increasing distance, the fraction of modes with high numbers, responsible for the small-scale structure of the field, decreases. As a result, the spatial distribution of the field in the localization region becomes smoother with increasing distance. This, in turn, leads to a decrease in the contrast of the focal spot, i.e., a decrease in the focus factor. For an SW at a distance of km at a frequency of Hz, , and at a frequency of Hz, . At a distance of km at a frequency of Hz, , and at a frequency of Hz, .
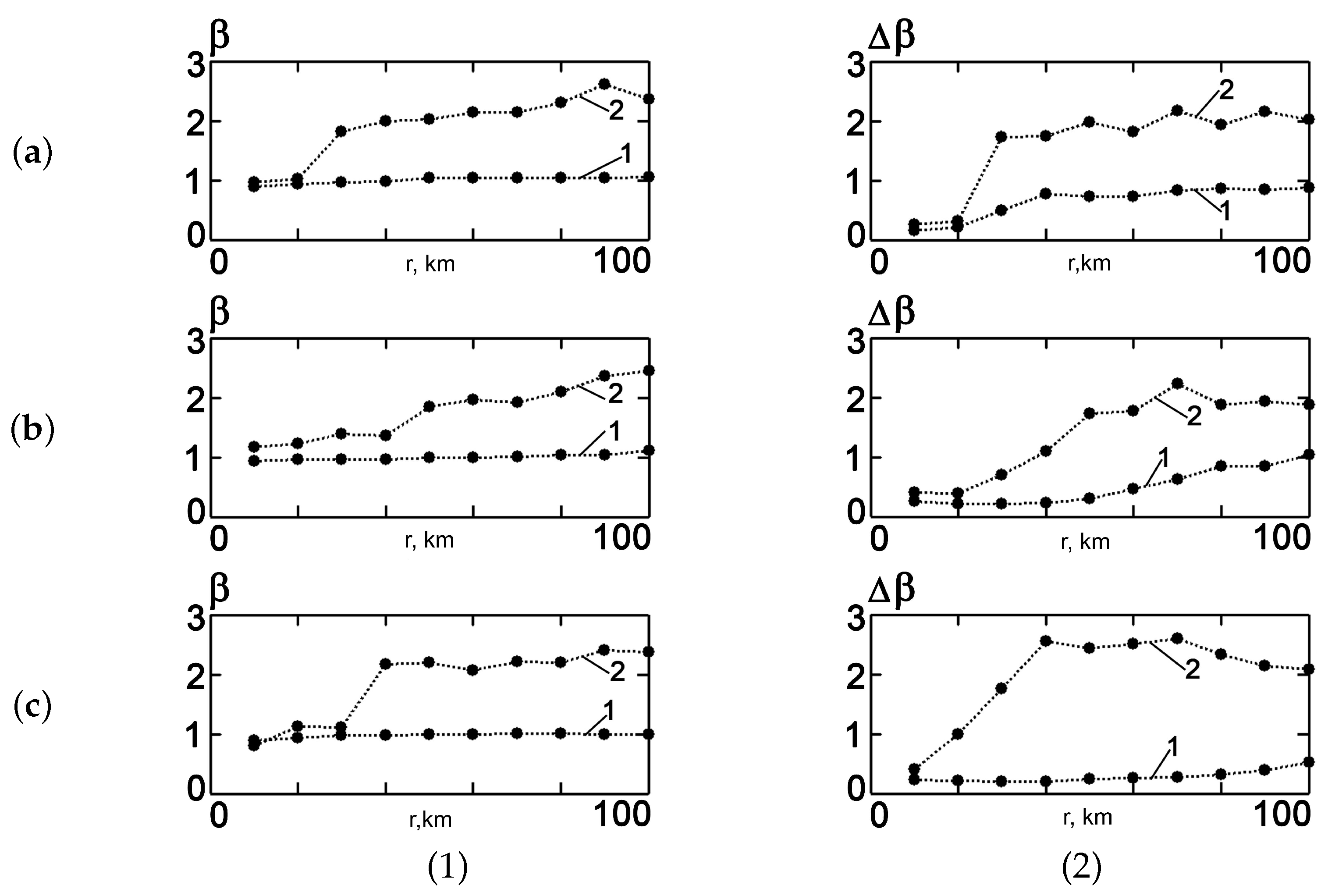
Figure 6 shows the dependence of the focusing factor
(a) and the horizontal size
of the focal spot (b) on the distance to the localization point. The results are related to the SW. Note that such a characteristic decrease of the focusing factor and an increase of the transverse dimension
is practically independent of the depth of the focusing point and the channel stratification.
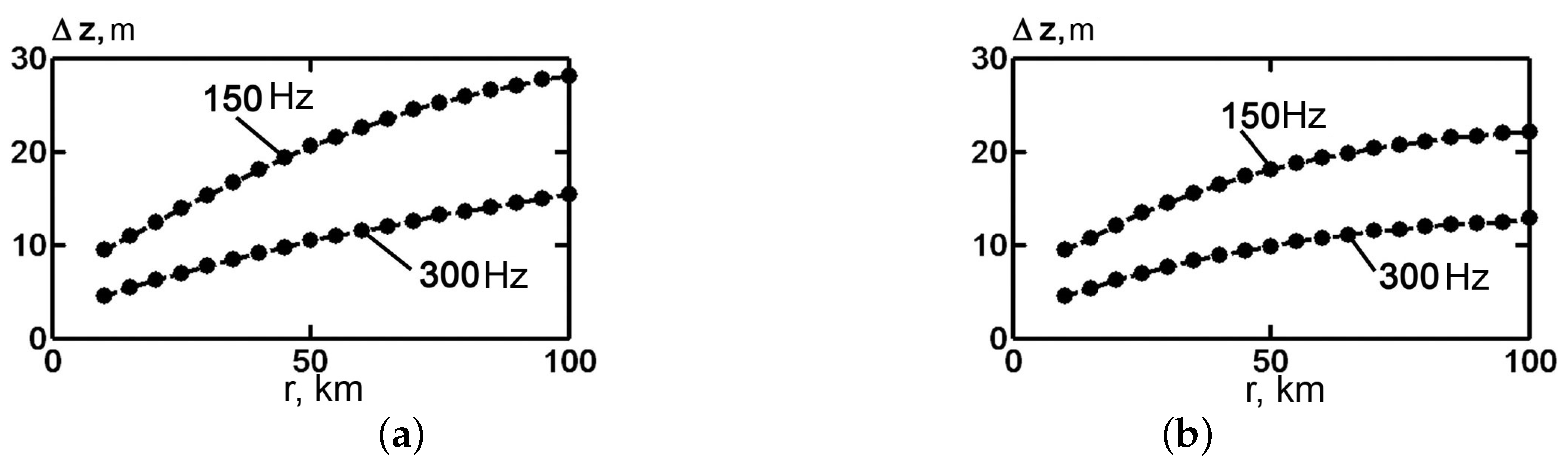
Figure 7 shows the dependence of the longitudinal size
of the focal spot on the distance to the localization point.
Figure 7a corresponds to the WW and
Figure 7b to the SW. As can be seen, faster growth is observed in the WW than in the SW. This is explained by the less uniform depth distribution of the modes in the waveguide with summer stratification.
In a shallow water waveguide, with the increase of the geometrical dimensions of the focal spot
,
and with the decrease of the focusing factor
g, another effect was observed. It consists of the displacement of the focal spot from the position of the localization point in depth. To illustrate this effect,
Figure 8 shows the dependence
on the absolute value of the difference between
(the depth of RP
Q) and
(the depth of the interference maximum closest to
Q). As can be seen, the focal spot is most displaced from the RP position near the free surface of the sound channel at frequencies of
Hz and
Hz:
m).
Moreover, in the sound channel with summer stratification, this effect is the most pronounced. At a distance of 100 km for a frequency of Hz, the shift of the focal spot from m) in the SW is m. This is approximately twice as much as compared to the WW, in which m. At the same time, at a high frequency Hz, the displacement does not exceed two meters in the WW for all considered depths. This situation persists over the entire distance range considered, from 10 km to 100 km. A similar situation was also observed in the SW for localization points below the thermocline, but for m), it increases abruptly to the value of m at a distance of 100 km. Such behavior is explained by the manifestation of bottom absorption, by which, with increasing distance, the fraction of high modes decreases. As is known, the high modes form the focal spot near the surface in the SW.
4. Sound Field Focusing Control by Frequency Tuning
In this section, the results of the work [
14] are further developed and the efficiency of controlling the field focusing by frequency tuning in a regular waveguide with different types of water layer stratification (WW and SW) is investigated.
The sound field is localized by the RTA field at frequency at RP . When moving to the point with frequency , the focal spot is destroyed due to the mode dephasing caused by the distance and depth values. The alignment of the mode phases, i.e., the restoration of the sound field focal point, is performed by frequency tuning f (—frequency shift). The frequency tuning allows shifting the undestroyed focal spot to the point without changing the original distribution of the sound field on the RTA. At the point , the maximum of the sound field is reached at frequency f. At frequencies deviating from the value f, the sound field value assumes a lower value.
As an example, we considered a shallow water waveguide (WW and SW) with parameters corresponding to the experiments of JUSREX (1992) [
22] and SWARM (1995) [
23]. Localization points
(
) were placed
km,
km,
km,
m,
m, and
m. The frequency band is
, where
Hz. The range domain is
, where
km.
It can be seen that the frequency band of the focal spot does not behave monotonically with increasing distance r. First, increases and then decreases. This can be observed especially in the range of higher frequencies. Hz. For the WW: Hz, Hz, and Hz. For the SW: Hz, Hz, and Hz.
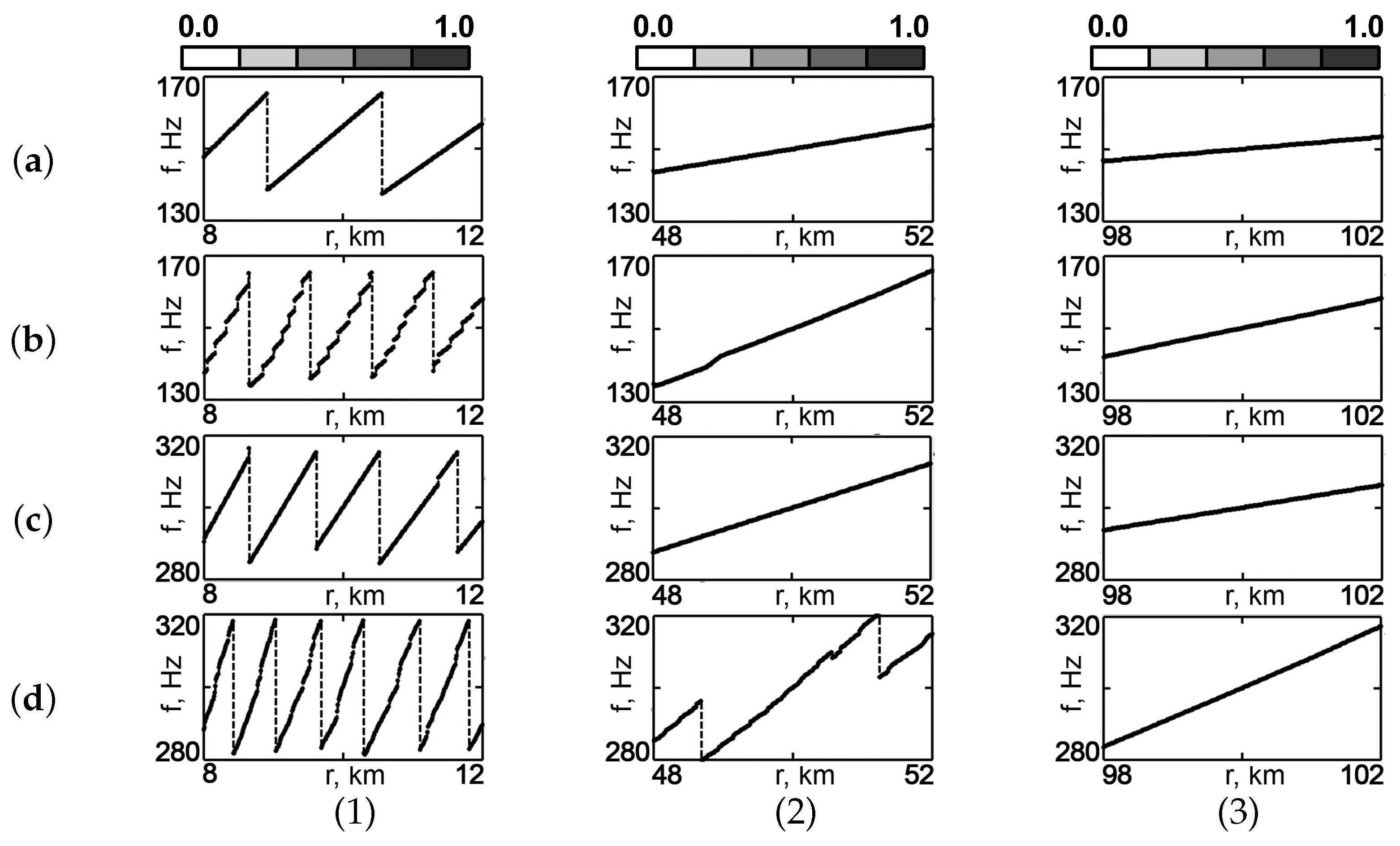
Another feature can be seen in the distributions in
Figure 15 and
Figure 16. At constant depth, there is a spatial periodicity of the focal points that is most evident in the distributions for distances
km and
km. This effect is a consequence of the property of multimode waveguides providing spatially periodic (though somewhat poorer) images [
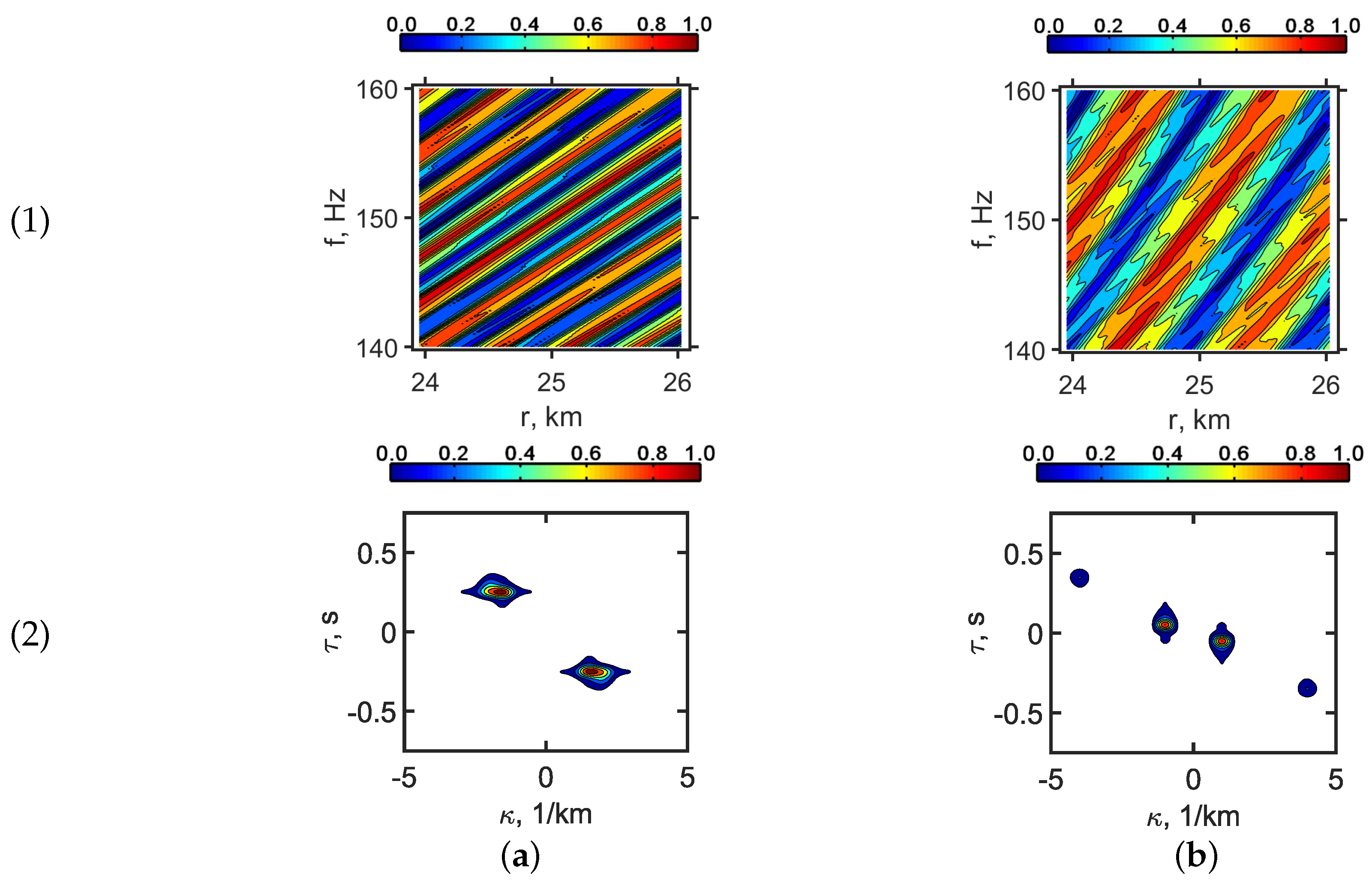
29]. Naturally, the magnitudes of the subsequent focal points gradually become blurred, and the amplitude decreases due to the increasing dephasing of the modes. To illustrate the noticed features of the periodicity of the focal spots, we considered the parameters of the interference structure of the sound field in the coordinates
. The field distributions in the coordinate system
at the frequency change at depth
m are shown in
Figure 17. The field localization regions are a sequence of the interference fringes of different slopes due to the periodic repetition of the focal points. The value of II
and the space period
corresponding to
Figure 17 are given in
Table 3.
As can be seen from
Figure 17, the angle of the interference fringes
decreases with increasing range
r. The values
for the SW exceed the corresponding values for the WW by more than twice. The same relation was observed for the II value
related to the SW and WW.
Figure 18 shows the dependence of the tuning frequency
on the distance
r as the focal spot moves to an arbitrary point
.
For given dependencies
, radiation frequency tunings are piecewise continuous. The dashed line marks the values of the distance at which the frequency undergoes a jump. The frequency
was calculated as follows. Along the interference fringe (
Figure 17), in the region where the reference point
is located, the frequency values
f corresponding to the maximum amplitude of the field
were determined. After passing to the boundaries of the current frequency tuning band
f, the transition to the neighboring band was performed with a frequency jump, and along this band, the process of calculating the tuning frequency was repeated, and so on. The
calculation algorithm was terminated when the limits of the distance change
r were reached. Thus, it is possible to control localized fields within a given frequency tuning band by jumping from one band to another. The piecewise continuity of the tuning frequency
is a consequence of the limited area of the focal spot within which the phase relations are preserved.
At the boundary of the region, the phase undergoes a discontinuity, which causes the frequency jump necessary to compensate for the change in the phases of the modes as they transit to another region of the field focusing. Scanning by focusing occurs on average along straight lines, with slope coefficients
decreasing with increasing distance. This property of the evolution of the slope of the straight lines is related to the variance of the II value with respect to the distance and the radiation frequency. This continuous region of focal spots corresponds to a dark band in which the reference point and the reference frequency of the radiation are located in the distributions of
Figure 17. There are practically no frequency jumps within this band. The slope coefficients corresponding to these bands are close to the values given above (see
Table 3). Thus, scanning with a focal spot in a section of a continuous trajectory is in agreement with the behavior of the II value
. The frequency of focal spot repetition apparently makes it possible to control localized fields at large distances with a narrow frequency band of the source. The limiting distances are, of course, limited by the width of the interval of constructively interfering modes, which provide an acceptable quality of focusing.
As an example, we show the structure of the field in coordinates
near the focal spot, shifted by frequency tuning. In
Figure 19 is shown the distribution of the sound field for the reference point with coordinates
Q(50 km, 60 m). The sound field frequency corresponding to
Figure 19 is given in
Table 4.
For the value
Hz, when the focal spot is shifted by a distance of
km, the frequency must be tuned to
Hz in the SW and to
Hz in the WW. For the value
Hz, the frequency must be tuned to
Hz in the SW and to
Hz in the WW. These numerical values of frequency tuning are in good agreement with the parameters of the interference structure of the sound field (
Figure 17) in the vicinity of the focal spot. As can be seen from
Figure 19, scanning with a focal spot by frequency tuning practically does not change the structure of the sound field in coordinates
in the vicinity of the focal point.
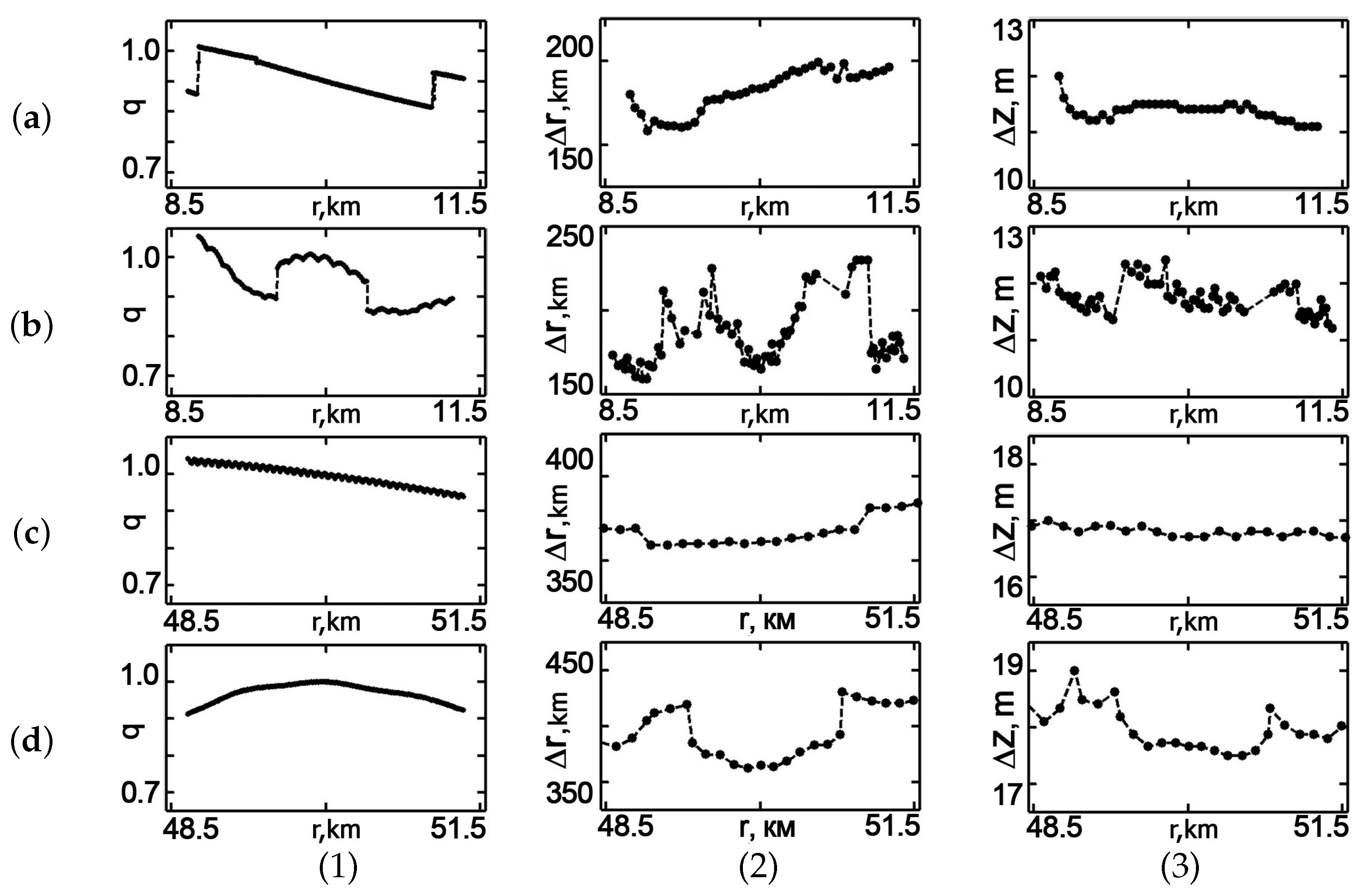
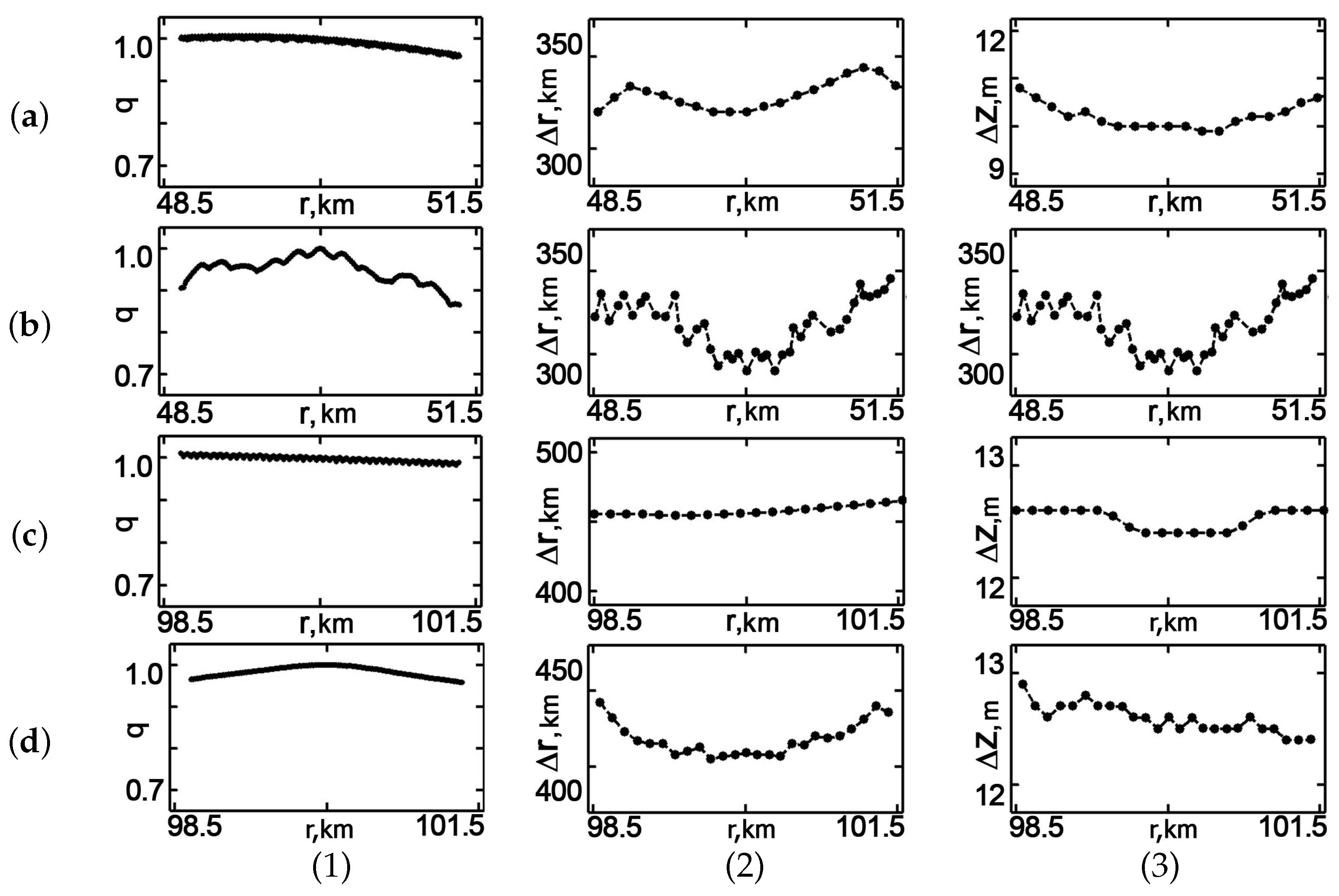
Let us consider the dependence of the focal spot parameters on the scanning distance, taking into account the longitudinal
and transverse
focal spot sizes, as well as the relative focusing factor
. By the relative focusing factor is meant the value:
Here,
denotes the field amplitude at a point
, focused by changing the radiation frequency
f;
is the amplitude of the focused field at the reference point
at the reference frequency
.
denotes one of the two cases:
Hz,
Hz. The dependence of the focal spot parameters on the distance is shown in
Figure 20 and
Figure 21. The reference point depth is 60 m.
As can be seen, the parameters of the focal spot are smoother (more stable) during frequency tuning in the WW. This can be explained by the fact that the interference structure in the SW consists of modes with significantly different spatial scales. The focal spot parameters are more stable at low frequencies than at high frequencies. Moreover, the instability of the focal spot parameters decreases with increasing distance from the reference point as the fraction of the bottom surface modes decreases. Regions with strong changes in magnitude q correspond to neighborhoods of tuning frequency jumps f. It should also be noted that the value q increases as the focal spot is shifted forward to the RTA. There are two processes that affect the value of q: the dephasing and the attenuation of the sound modes. The dephasing of the sound modes is due to the shift of the focal spot. The dephasing of the modes leads to a decrease in the focal spot value q for both cases: shift towards the RTA and shift from the RTA. The attenuation of the modes leads to an increase of the focal spot value in the case of a shift towards the RTA and to a decrease of the focal spot value in the case of a shift from the RTA.
The process caused by the modes’ attenuation is stronger than the process caused by the modes’ dephasing for short range ( km). As a result, the focal spot shift to the RTA leads an increase of the focal spot value q. In contrast to a short range ( km), at a long range ( km), the focal spot value decreases for both cases: shift forward the RTA and shift from the RTA. This is due to a decrease of the high modes’ contribution (modes’ attenuation) in structure of the sound field with the range increasing.


 ,
, 






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}