



Research on Black-Box Modeling Prediction of USV Maneuvering Based on SSA-WLS-SVM

 ,
,
Abstract
:1. Introduction
- (1)
- To obtain maneuvering data samples that meet the condition of regression processing.
- (2)
- Determine the black-box regression model and train the model using the dataset obtained above to obtain the nonlinear relationship between the input and output samples.
- (3)
- To predict the output of the test set using the trained black-box model and to compare the output with the actual results to verify the generalization of the model.
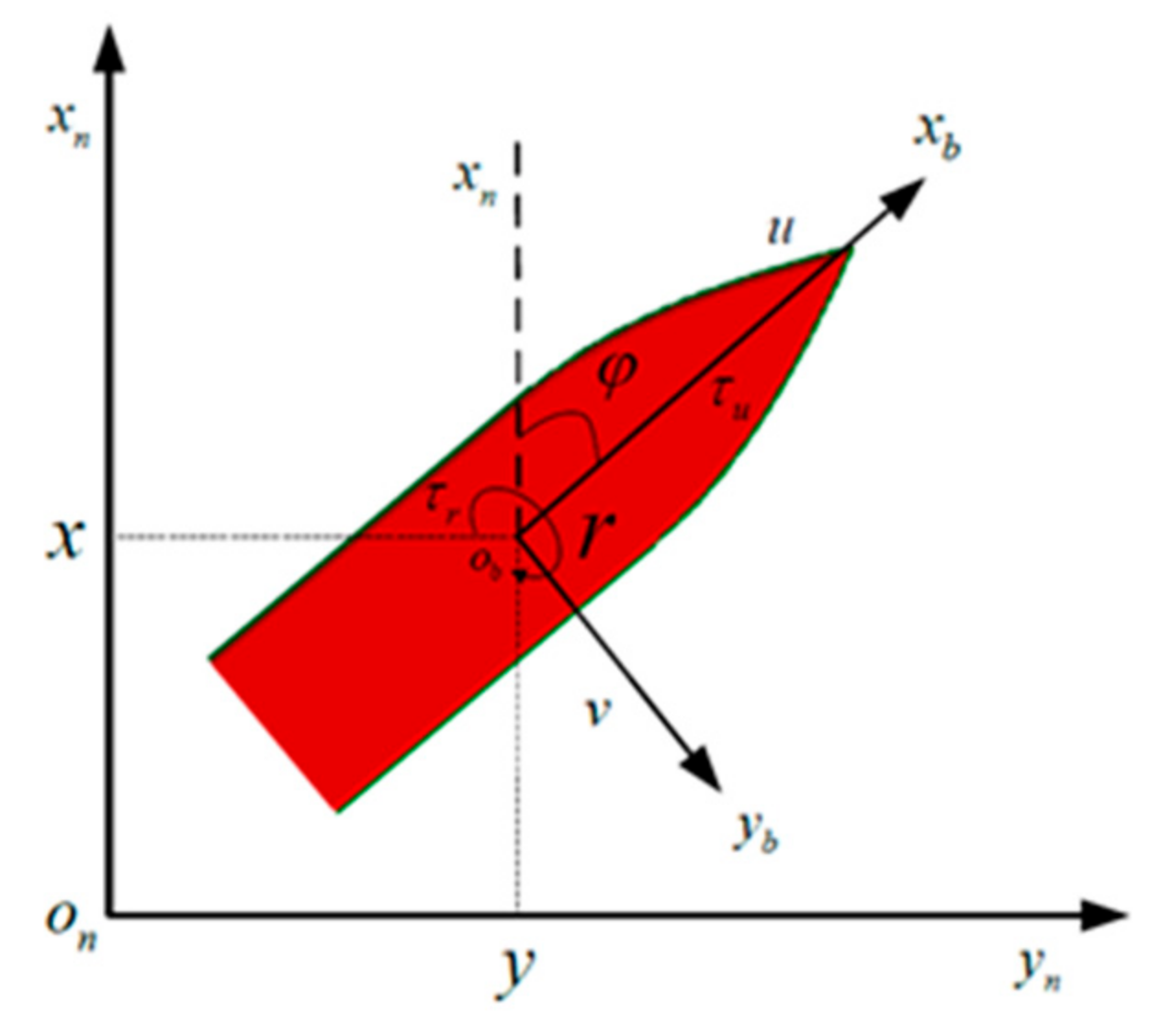
2. Description of a Ship Motion Prediction Problem
3. Black-Box Model Training Data Acquisition
- (1)
- A 3-DOF MMG motion simulation in typical scenes was conducted;
- (2)
- A test platform was established for test verification (including filtering of test data);
- (3)
- The test date was compared with the MMG simulation date to verify the accuracy of the MMG model;
- (4)
- The MMG model was used to produce training data.
3.1. MMG Modeling for Simulation Purposes
3.1.1. Static Hydrodynamic (Moment) Modeling
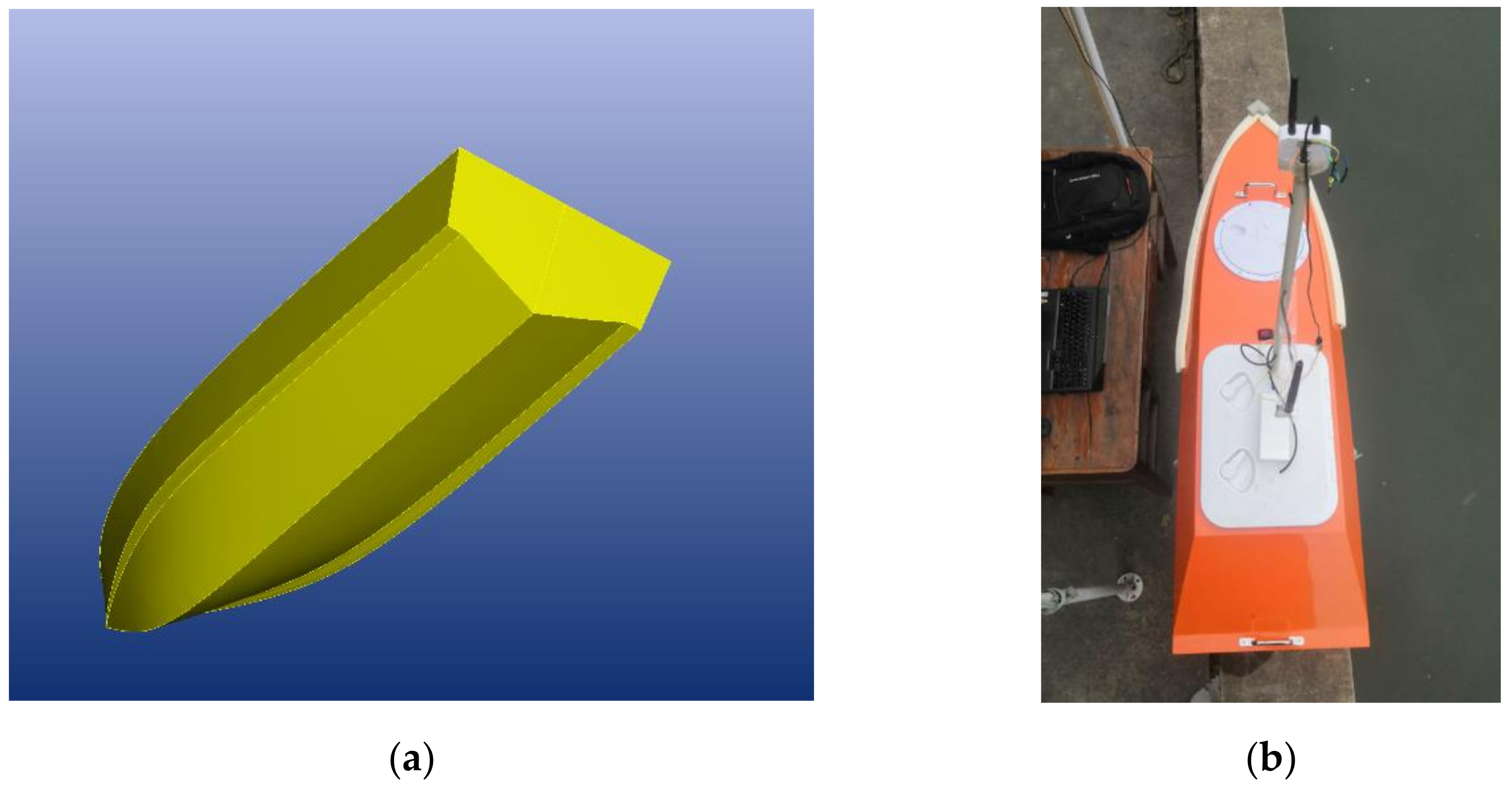
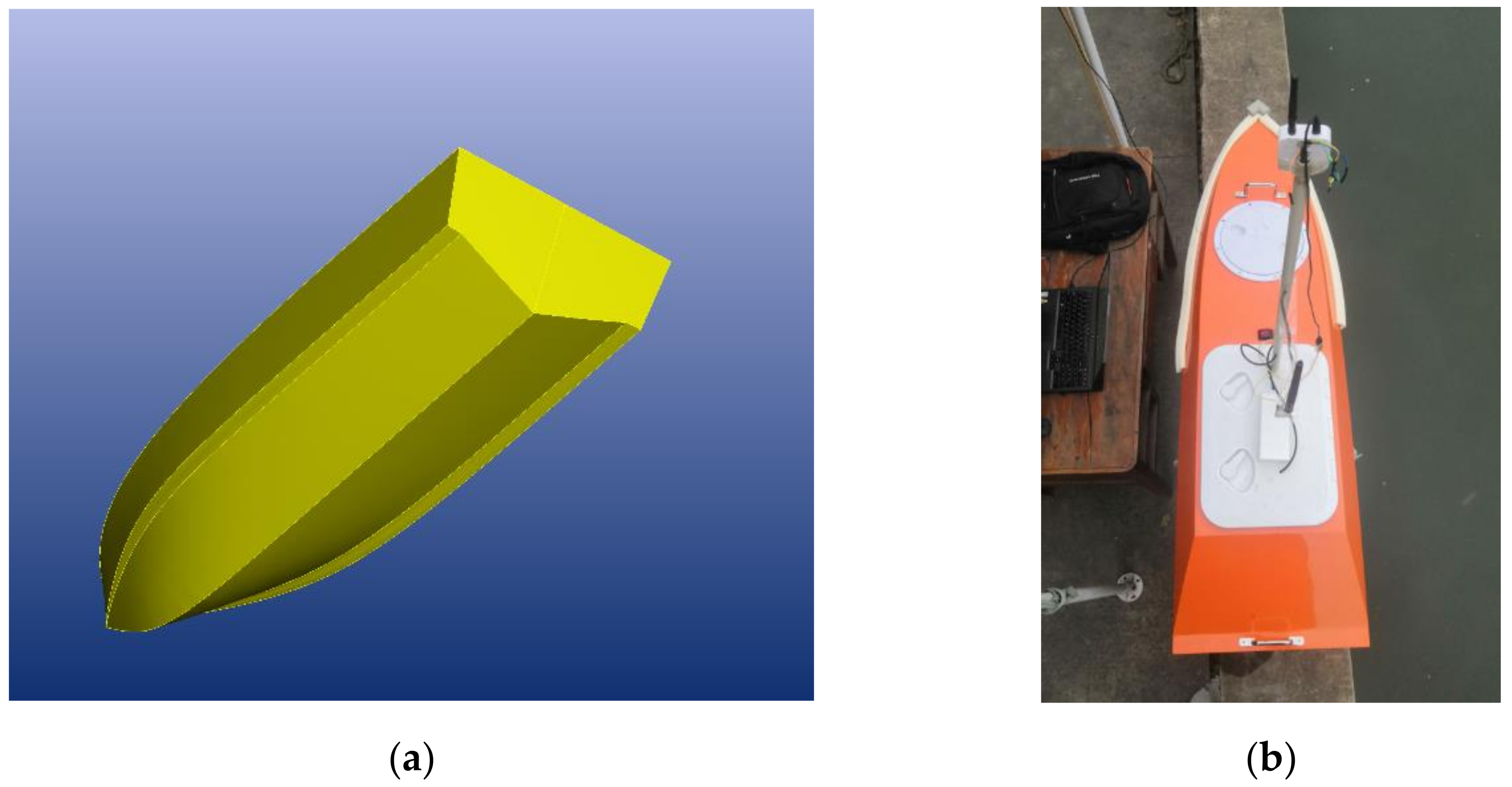
3.1.2. Calculation Object
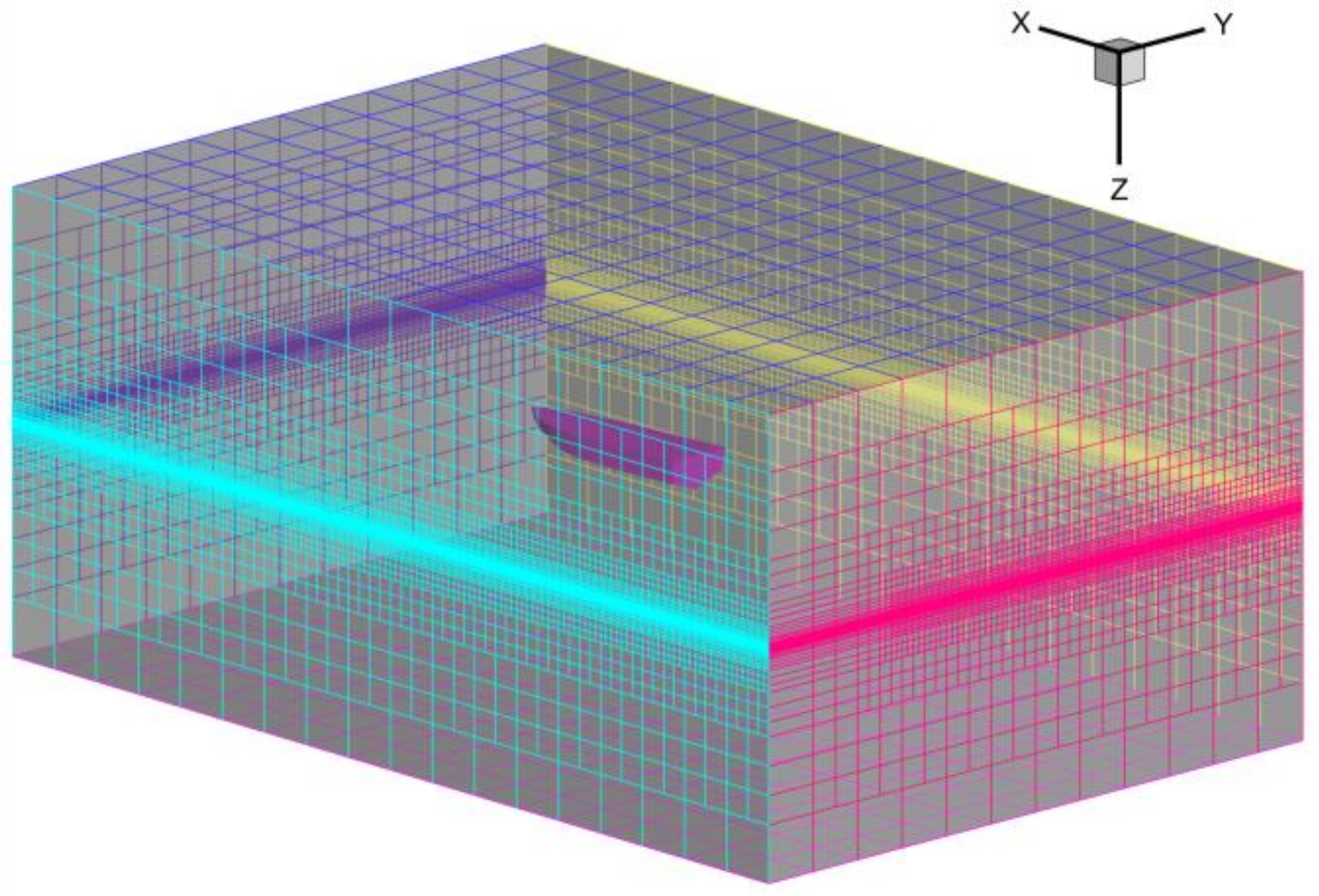
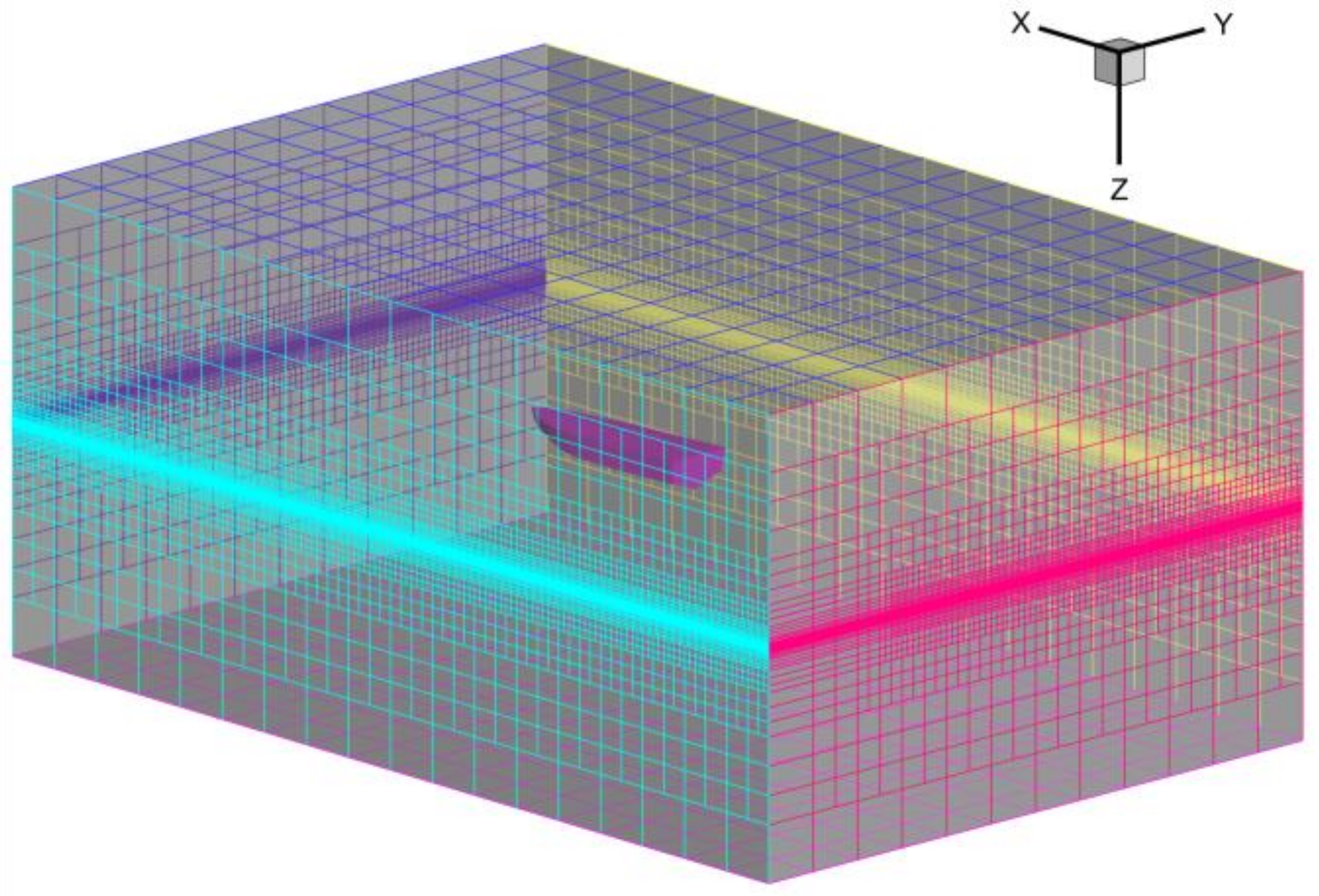
3.1.3. Compute Grid
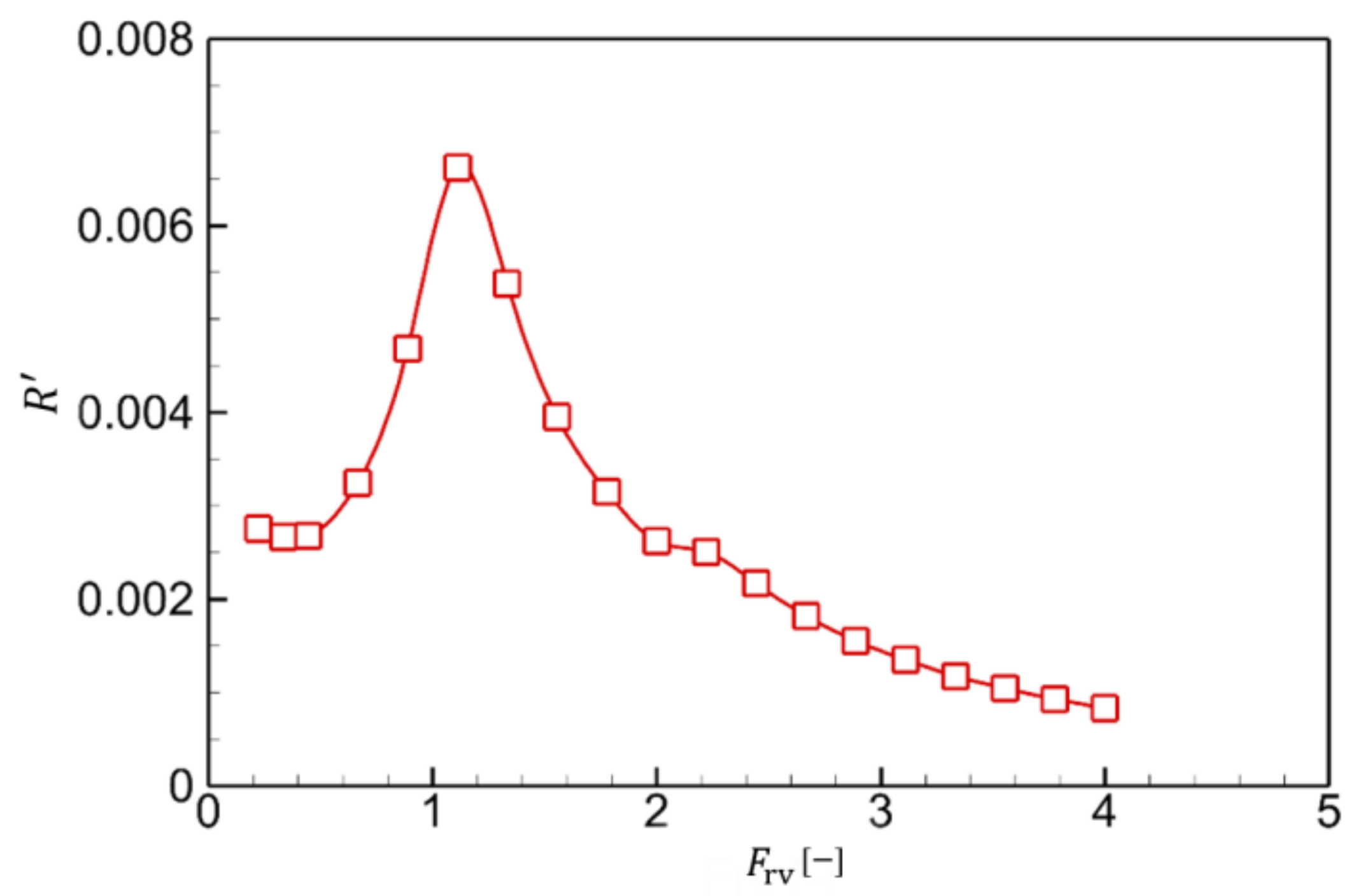
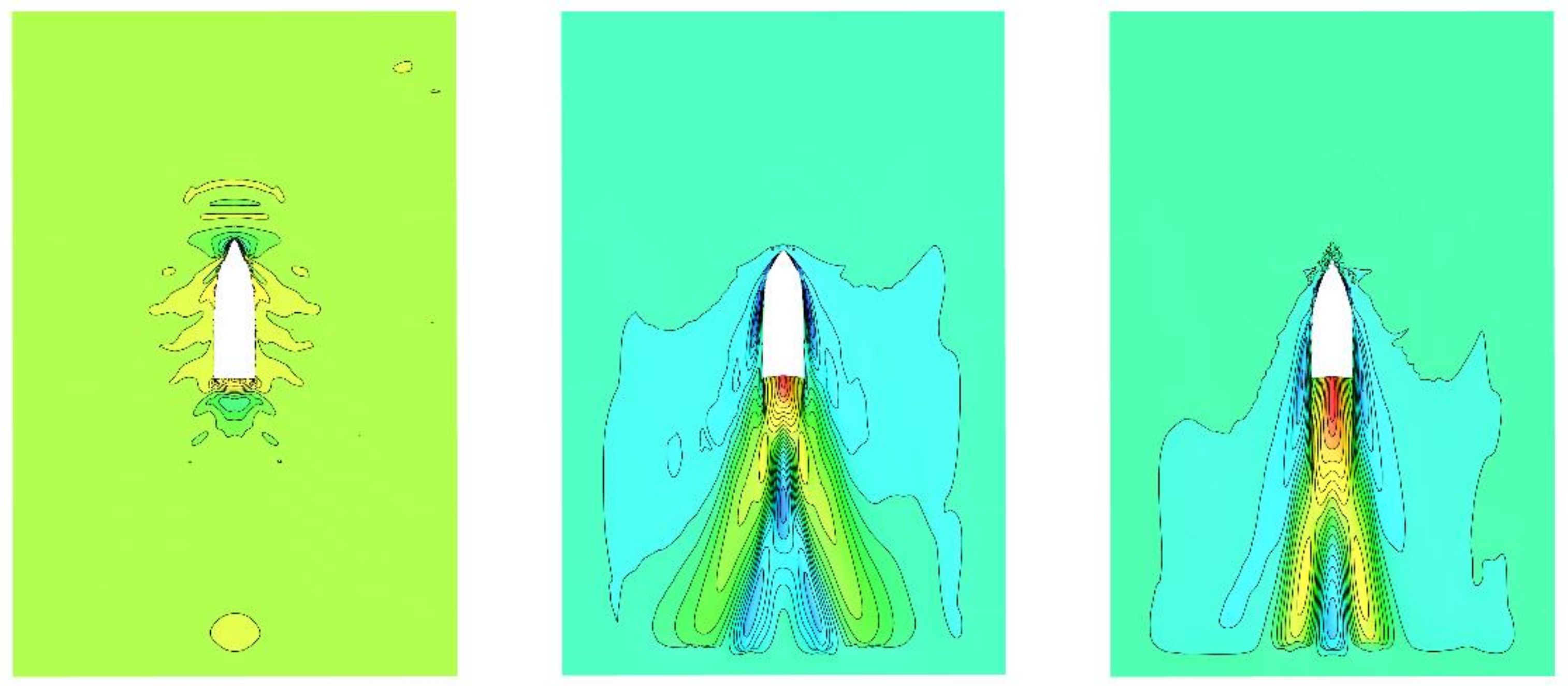
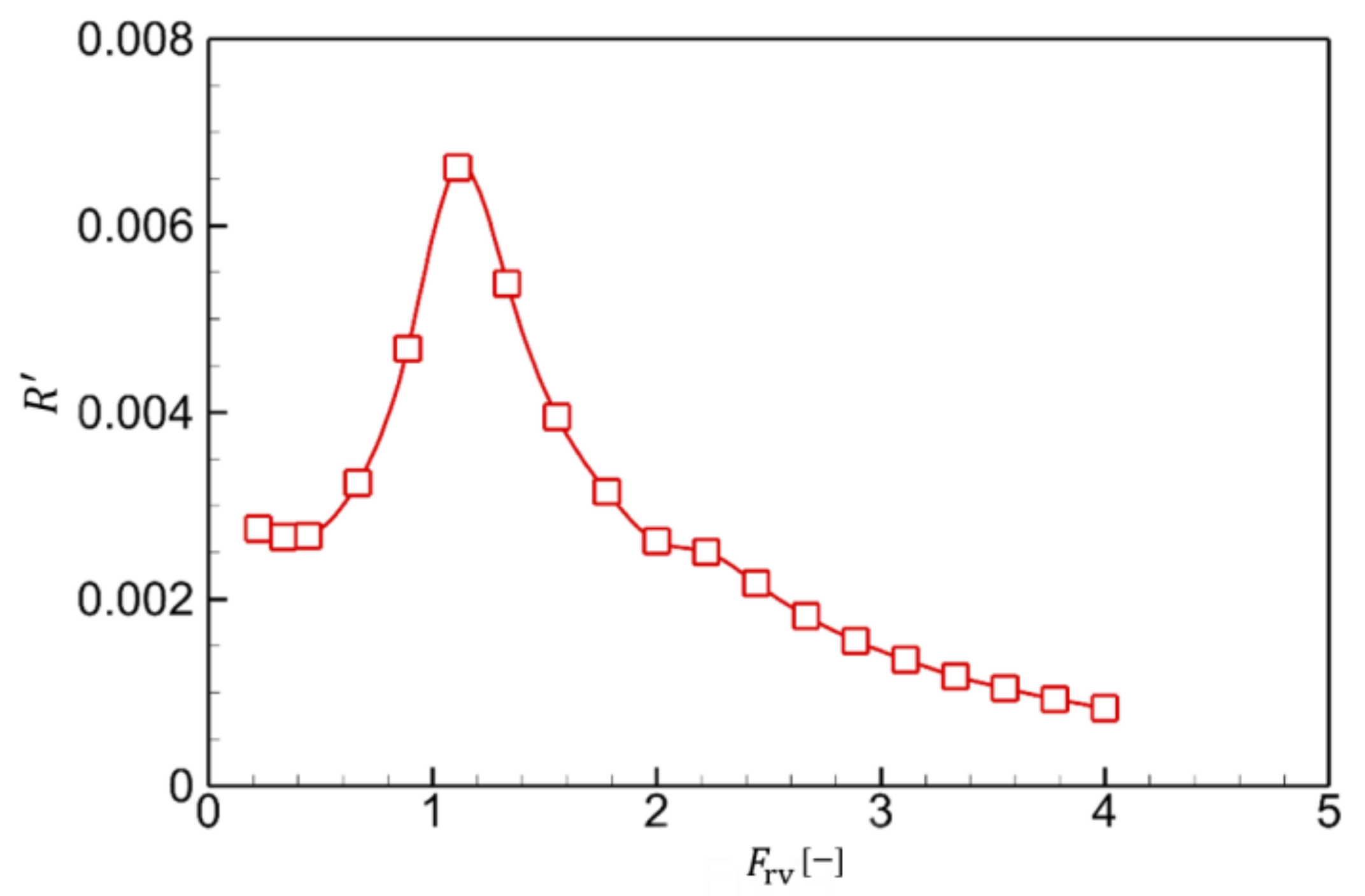
3.1.4. Calculation Result of Direct Navigation Resistance
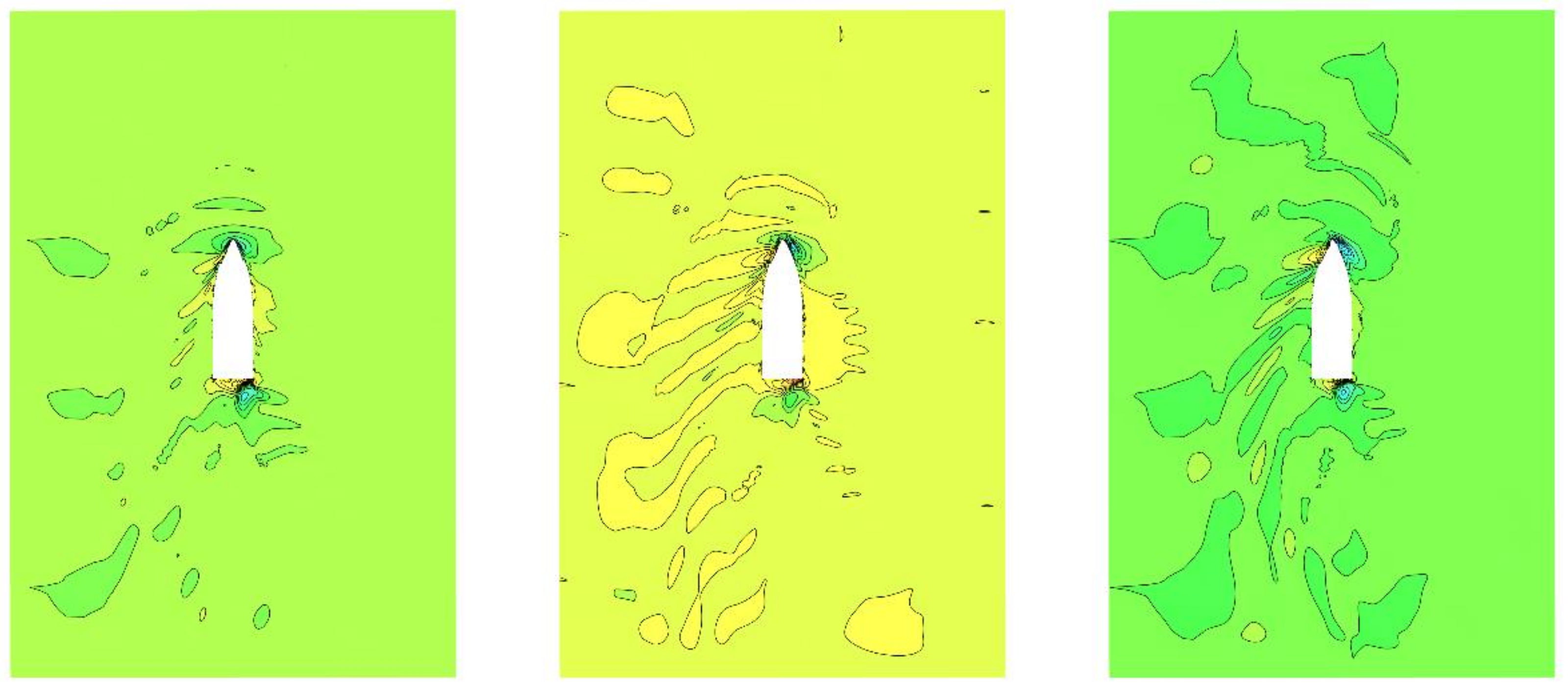
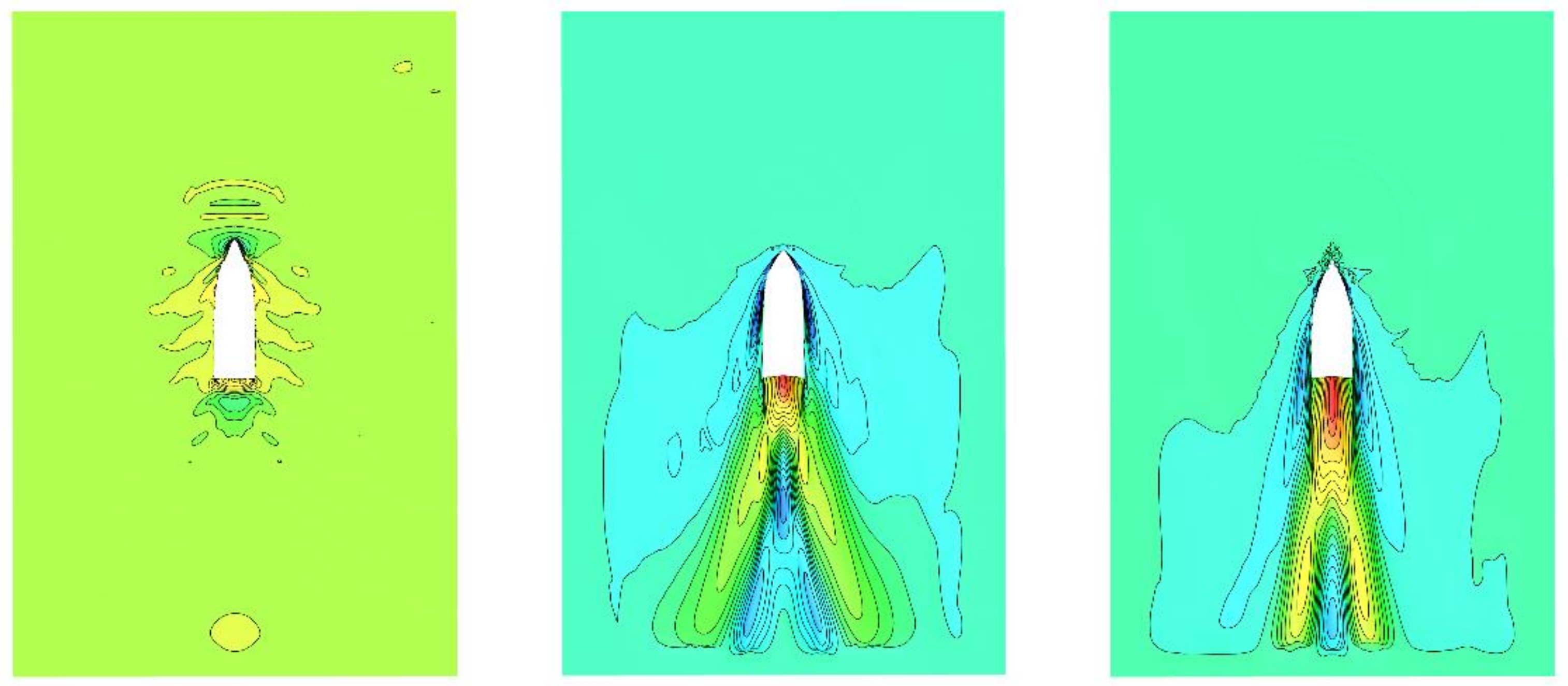
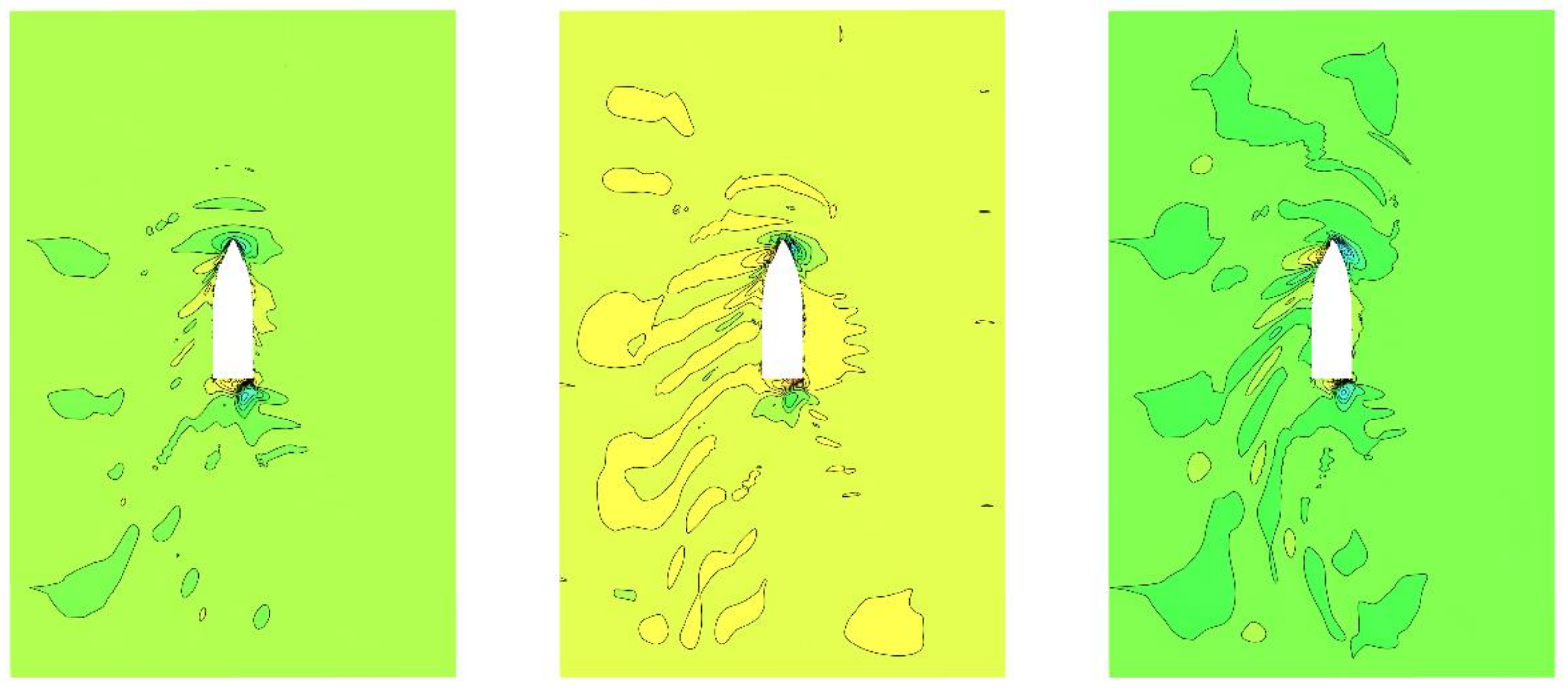
3.1.5. Coupled Hydrodynamics of Oblique Motion and Circling Motion
3.1.6. Hydrodynamic Derivative
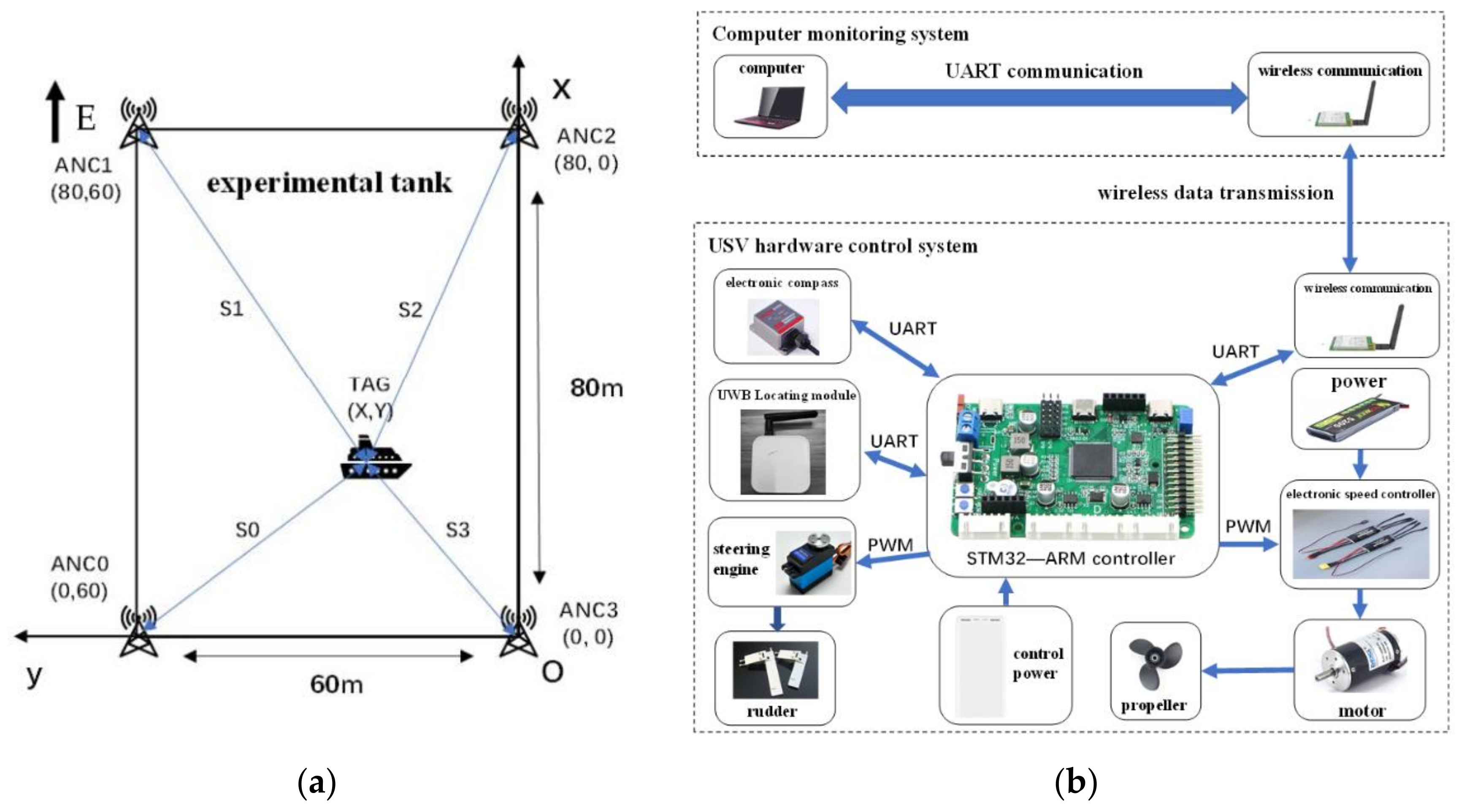
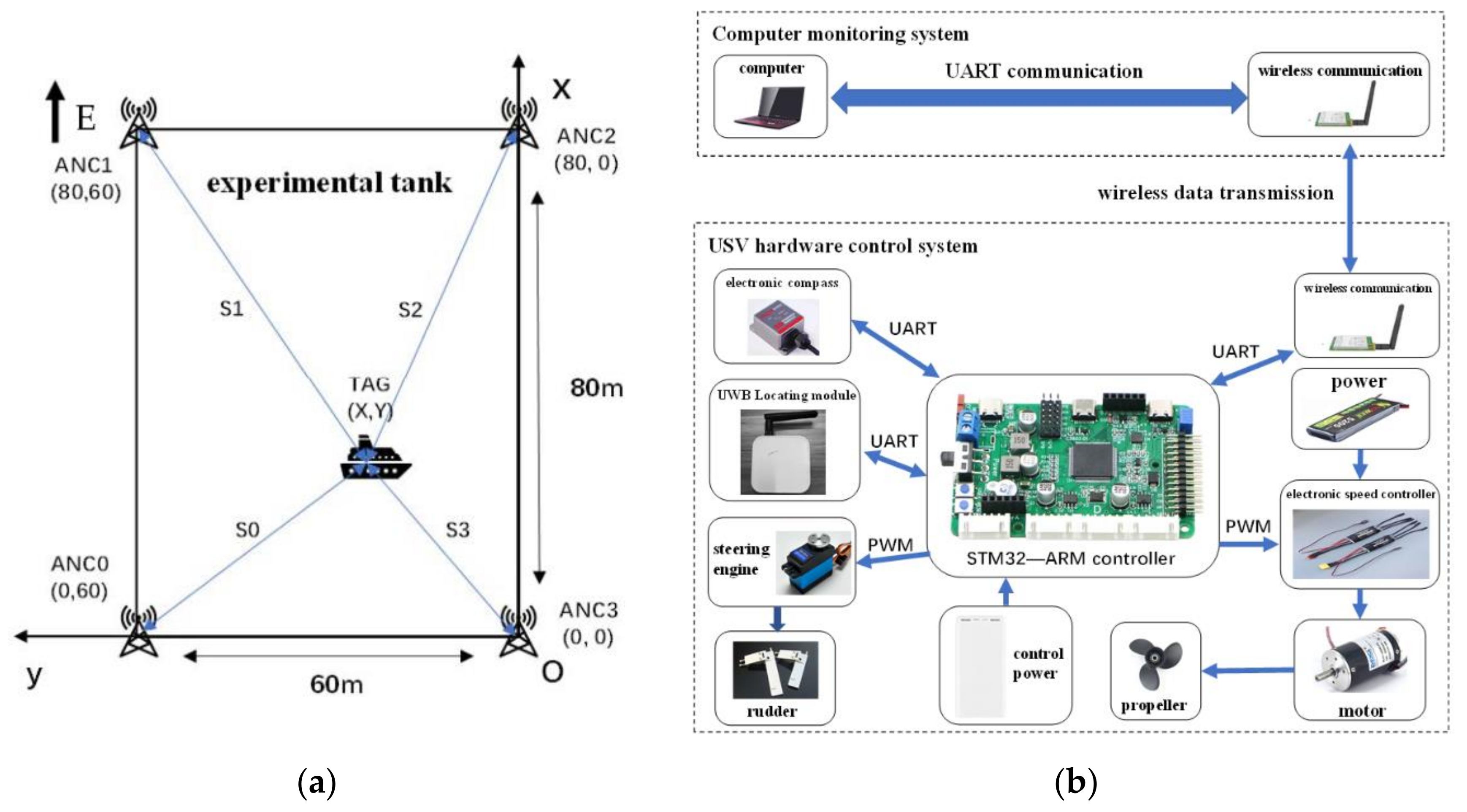
3.2. Test Platform Construction
3.3. Test Data Processing
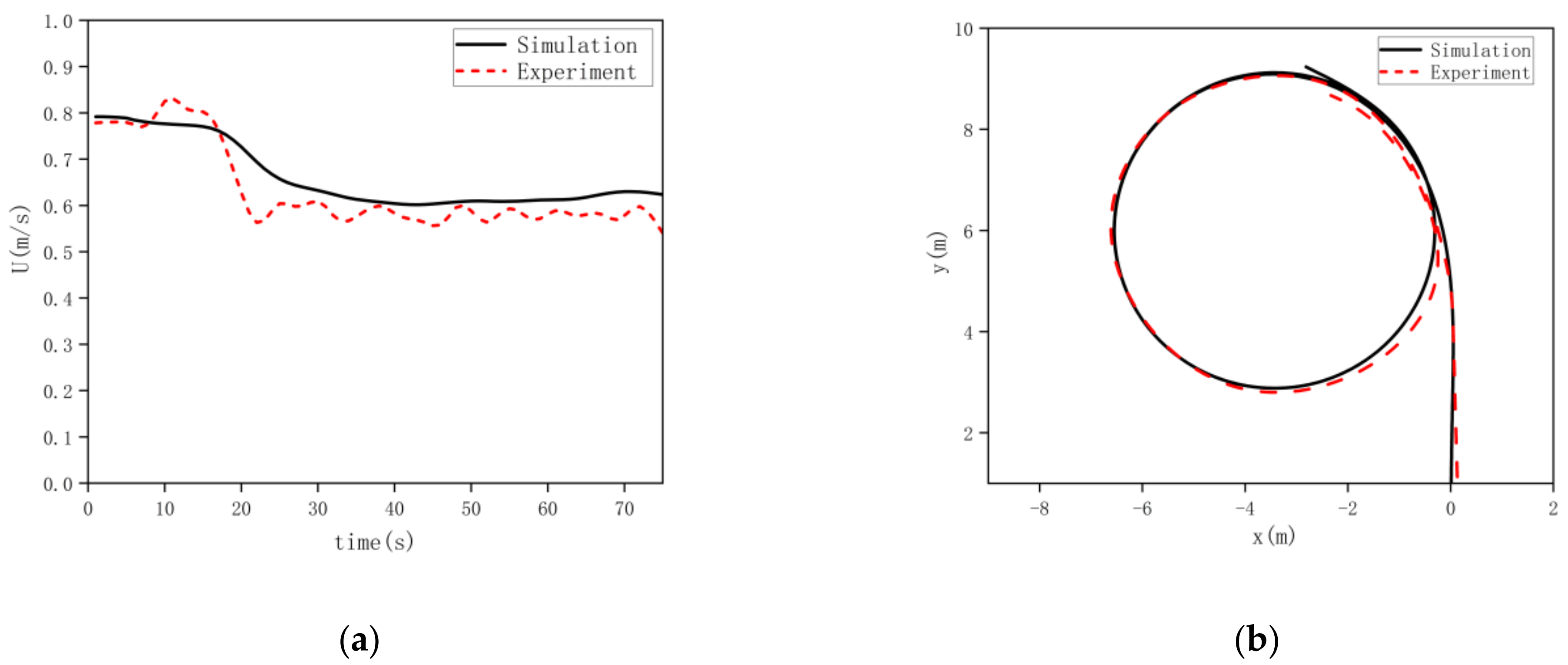
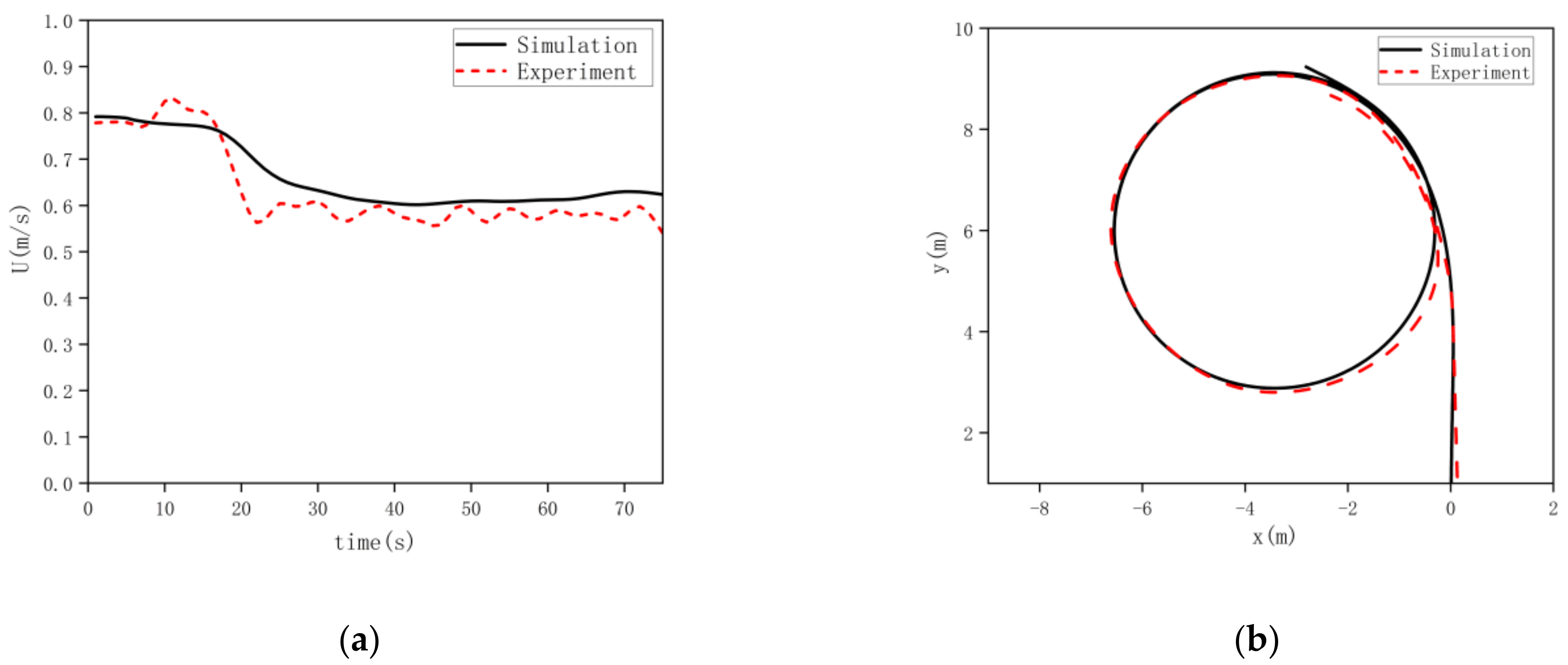
3.4. Validity Verification of Simulation Samples
- (1)
- Test platform data acquisition
- (2)
- Simulation data acquisition
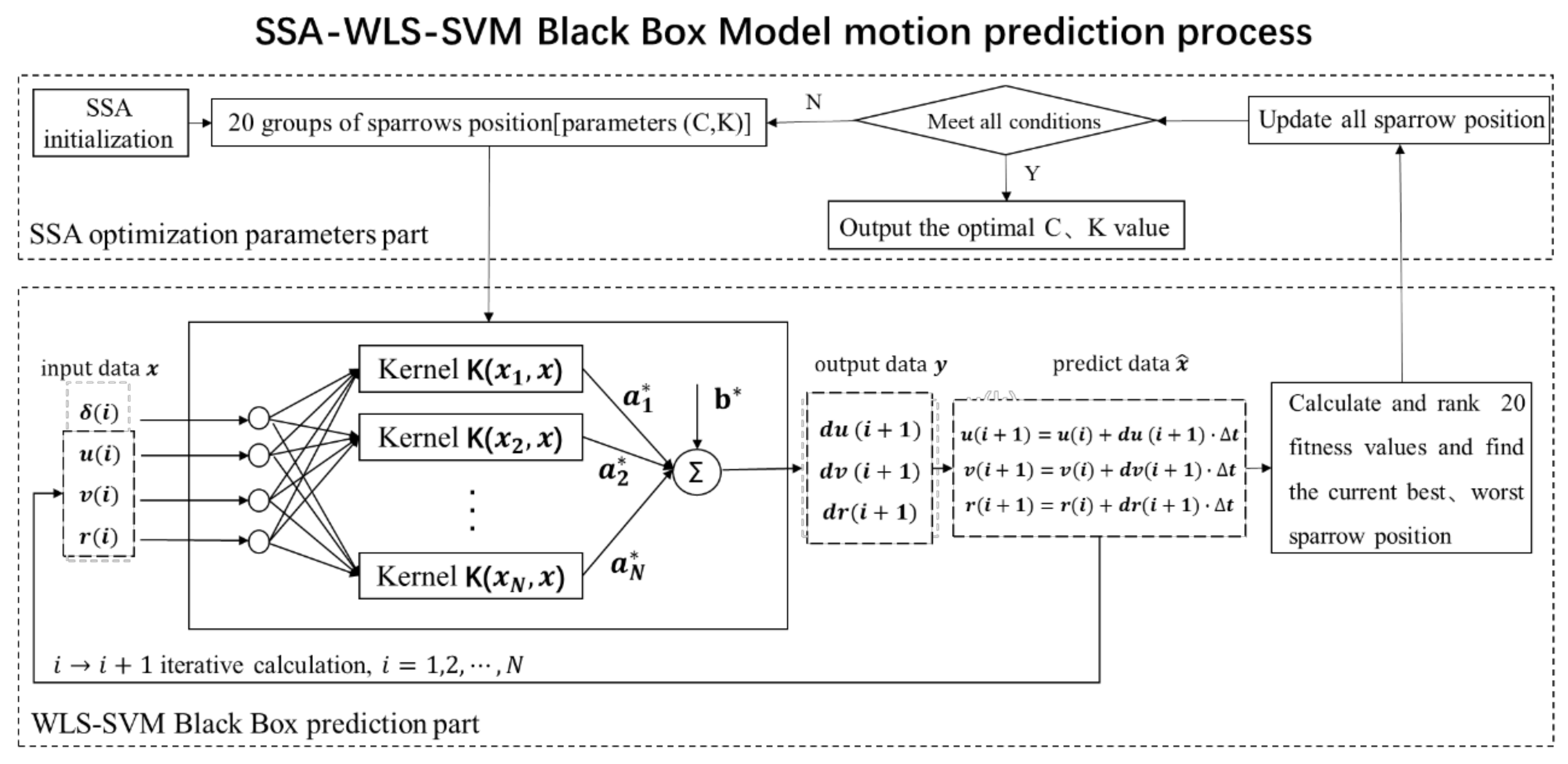
4. The SSA-WLS-SVM Algorithm
- (1)
- The sample set given by WLS-SVM is taken as the benchmark, the regularization parameter and kernel parameter of WLS-SVM were taken as the optimization objects of the SSA algorithm. The sparrow population size, iteration times, and initial safety threshold are determined to initialize the SSA optimization algorithm.
- (2)
- Initial or subsequent updated values of and are taken as optimization parameters of the LS-SVM algorithm, and the LS-SVM Lagrange multiplier is weighted to obtain error variables . According to Equation (16), the standard variance is taken to calculate ; then, the weighted coefficient is determined based on and , and Equation (13) is solved to obtain the WLS-SVM model corresponding to the and values.
- (3)
- The RMSEs of both the predicted value from the WLS-SVM model and the actual sample value are used to calculate the adaptive value of each sparrow.
- (4)
- Update the position of the sparrow particles based on Equations (21)–(23) to obtain the fitness value of the sparrow population, and save the optimal individual position and global optimal position in the population.
- (5)
- Check whether the termination conditions have been met or whether the maximum number of update iterations has been reached. If yes, the loop will end and the optimal individual solution, which determines a set of optimal parameters of WLS-SVM, will be returned; otherwise, steps (2)–(4) will continue.
- (6)
- Take the optimal particle value output using the SSA algorithm as the regularization parameter and kernel parameter in WLS-SVM. Step (2) is repeated to calculate the WLS-SVM model corresponding to the optimal regularization parameter and kernel parameter .
5. Model Training
5.1. Design and Pre-Processing of Datasets
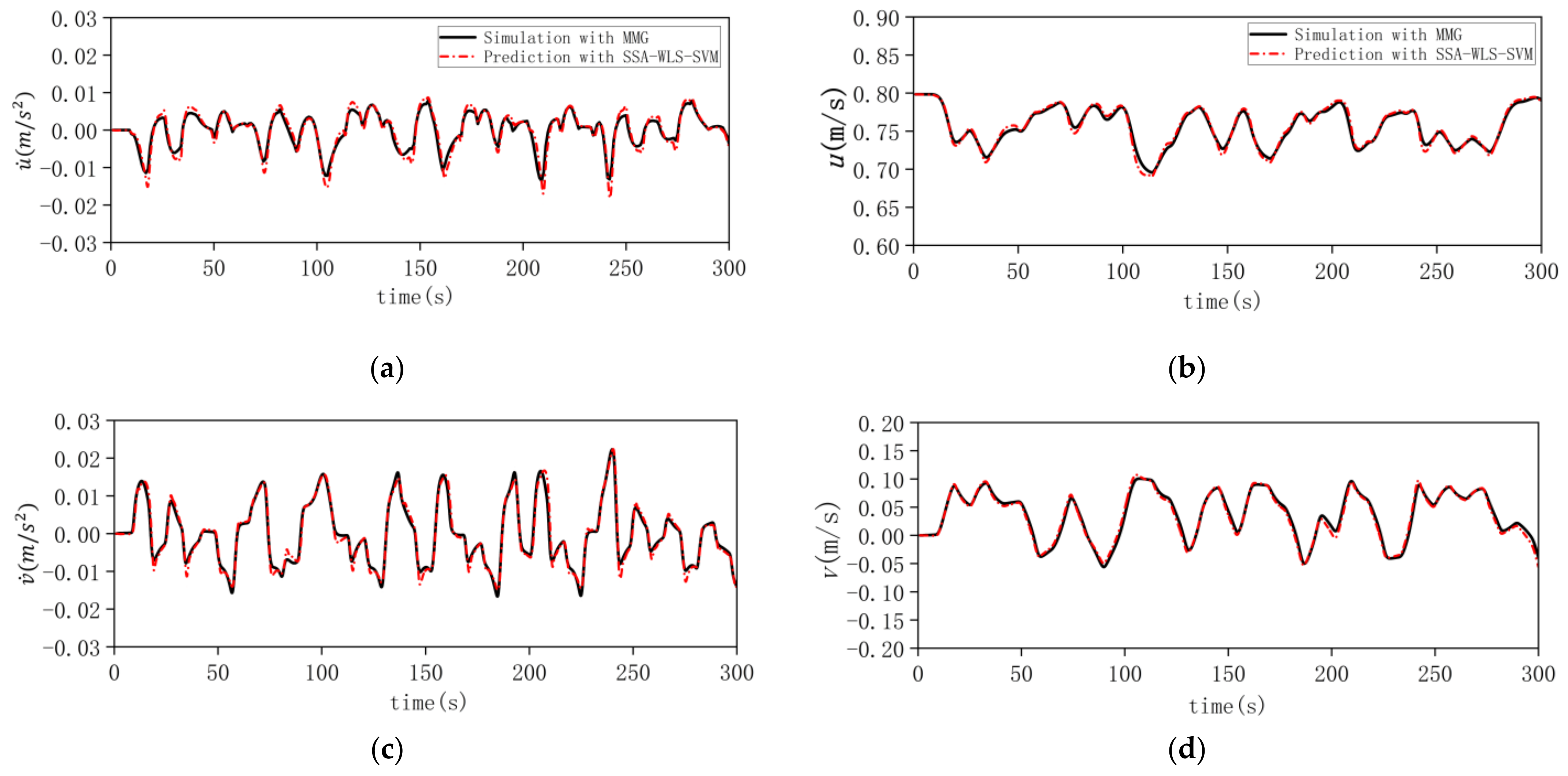
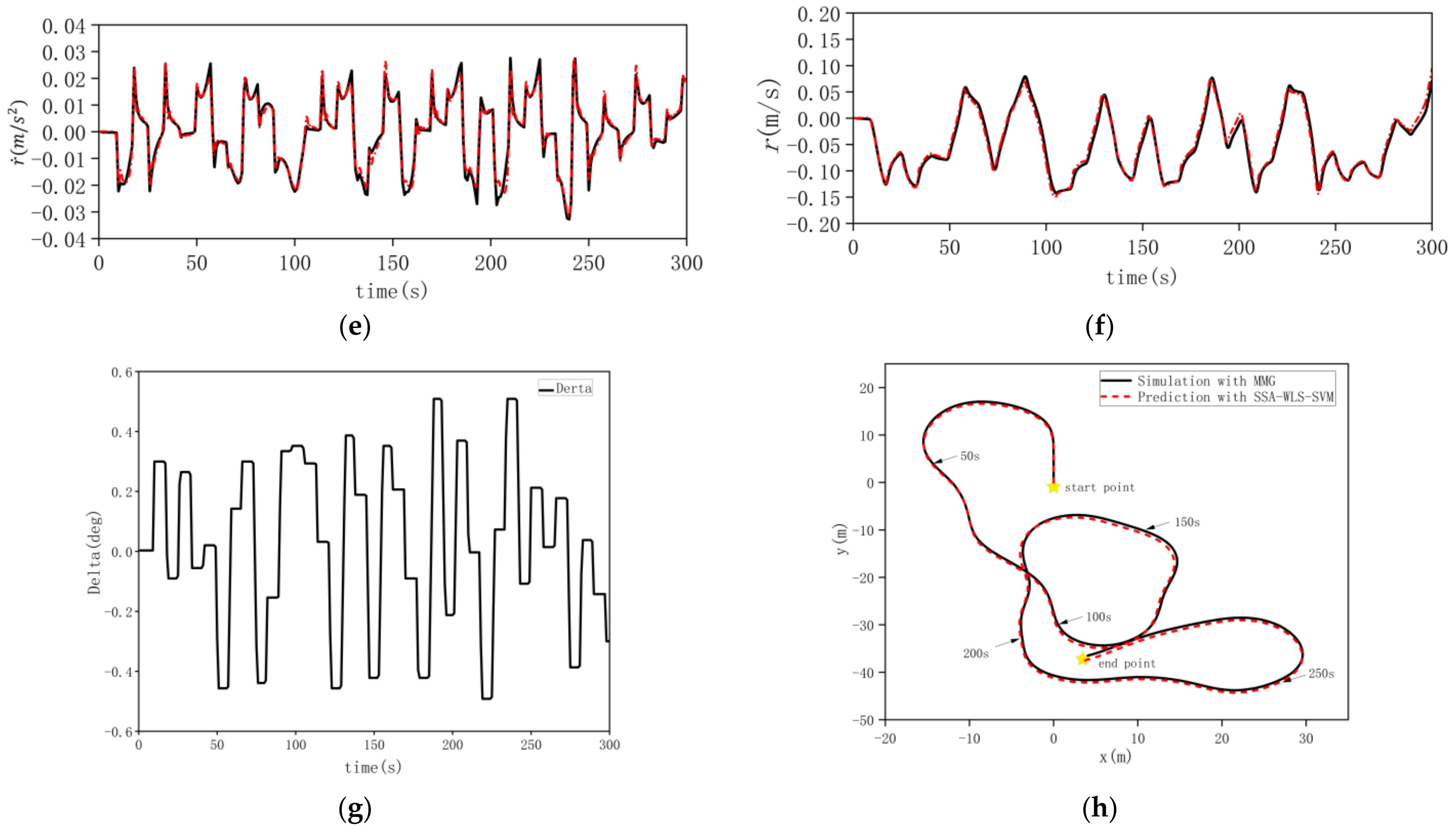
5.2. Model Training
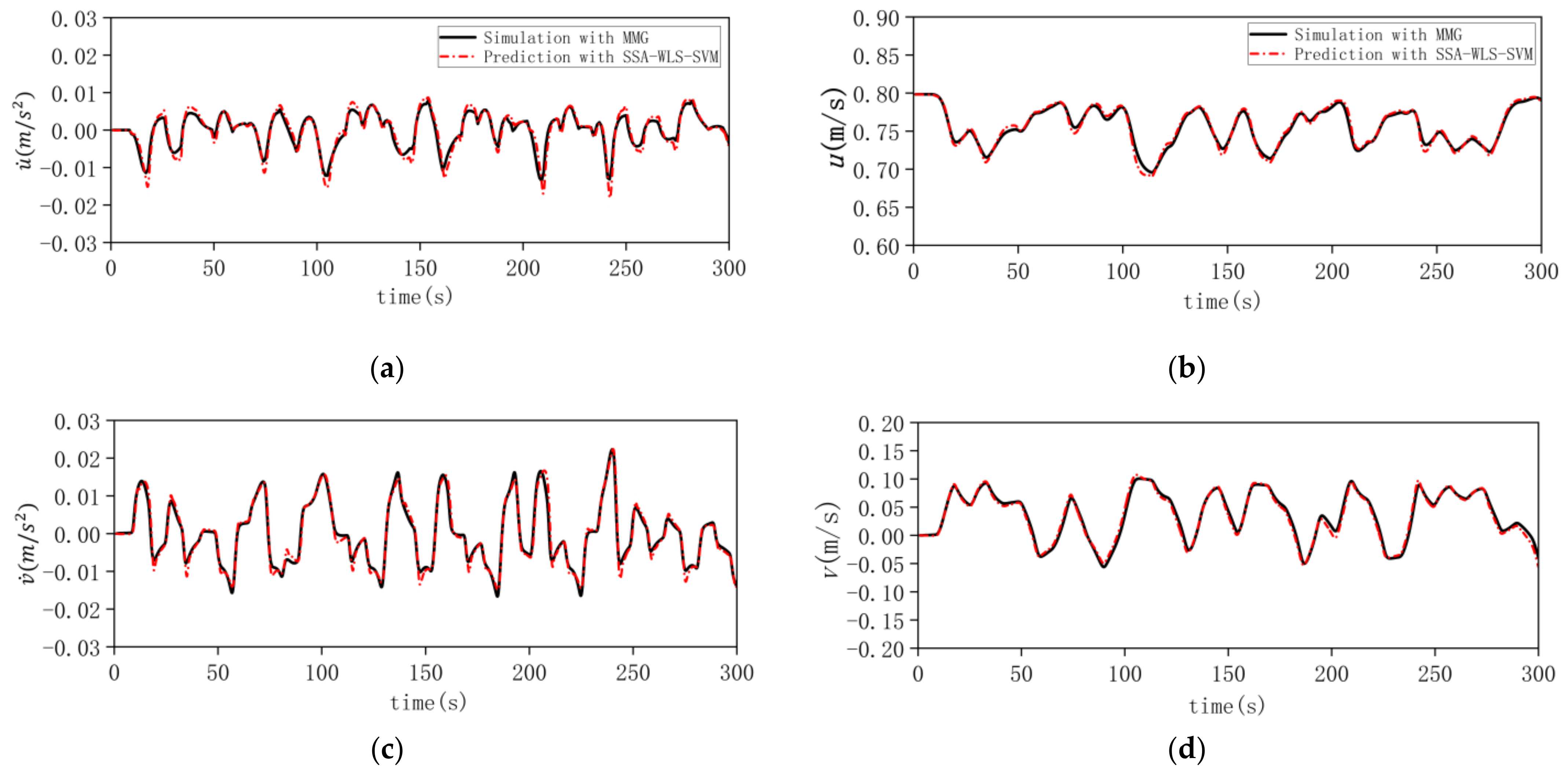
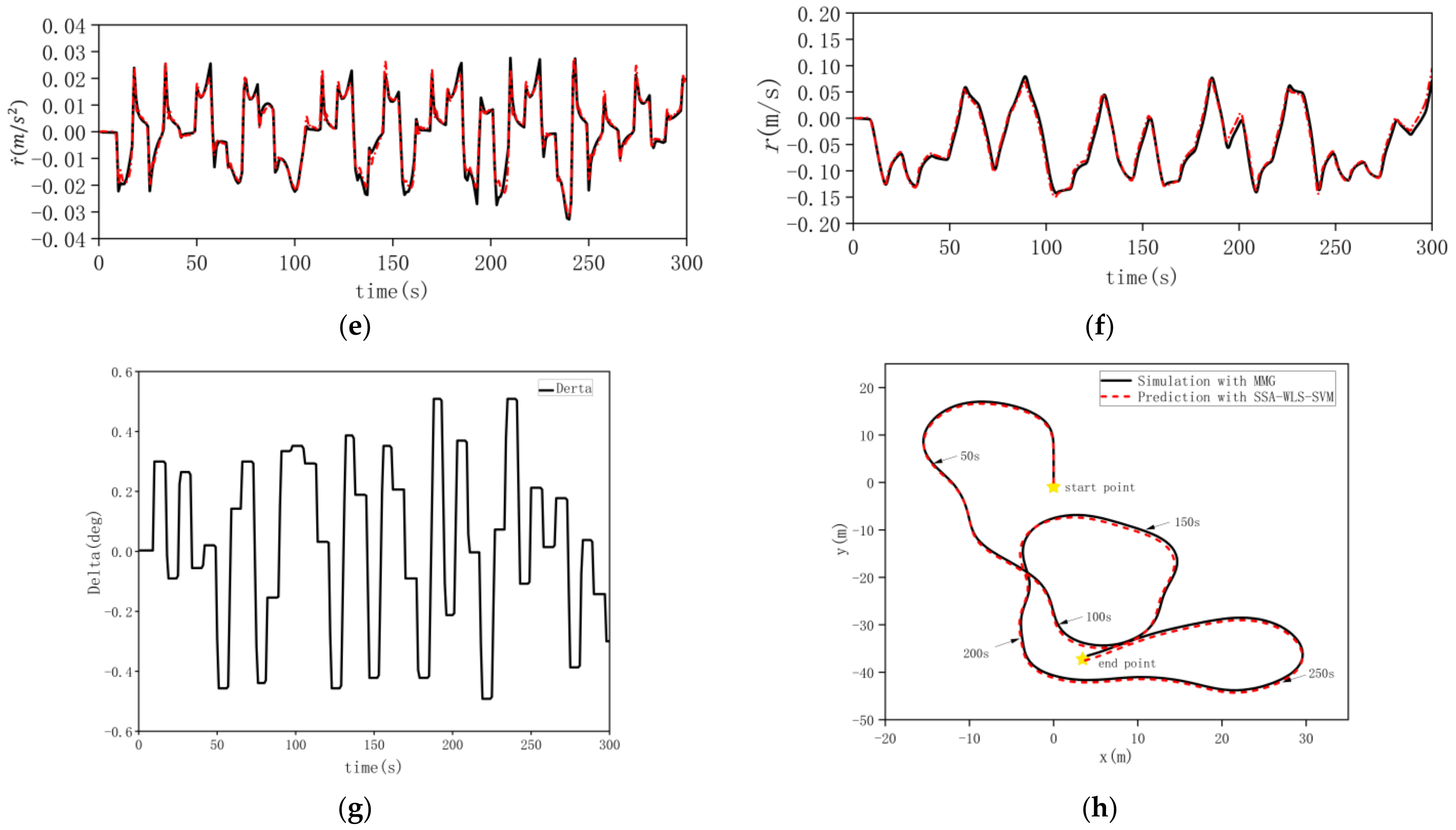
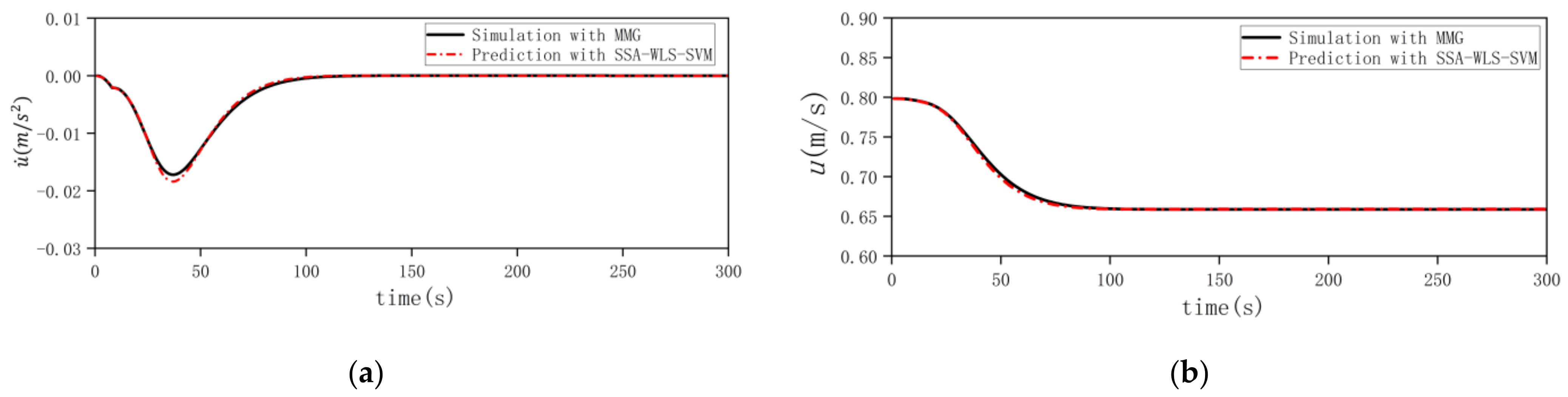
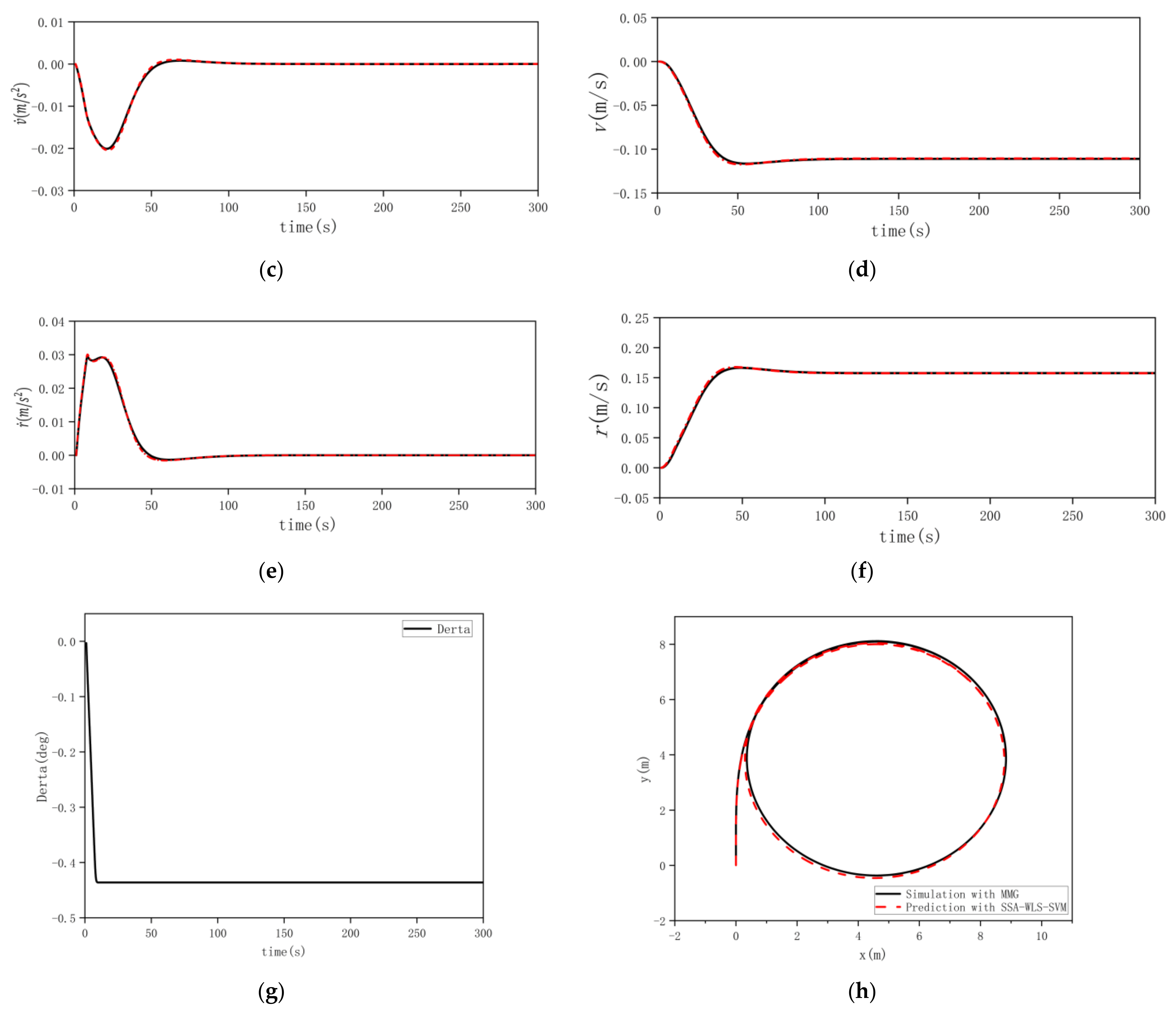
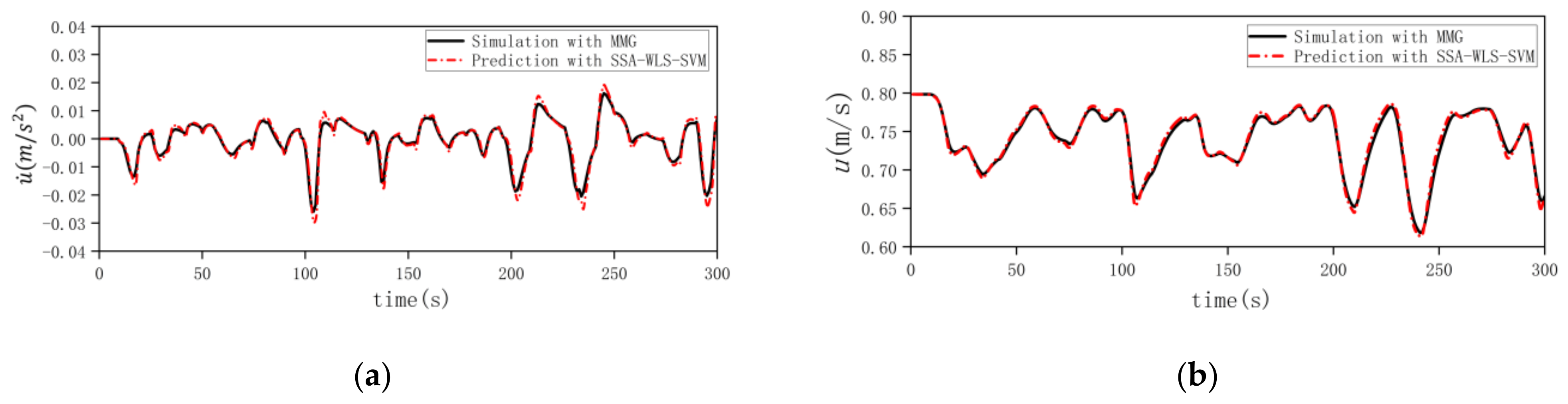
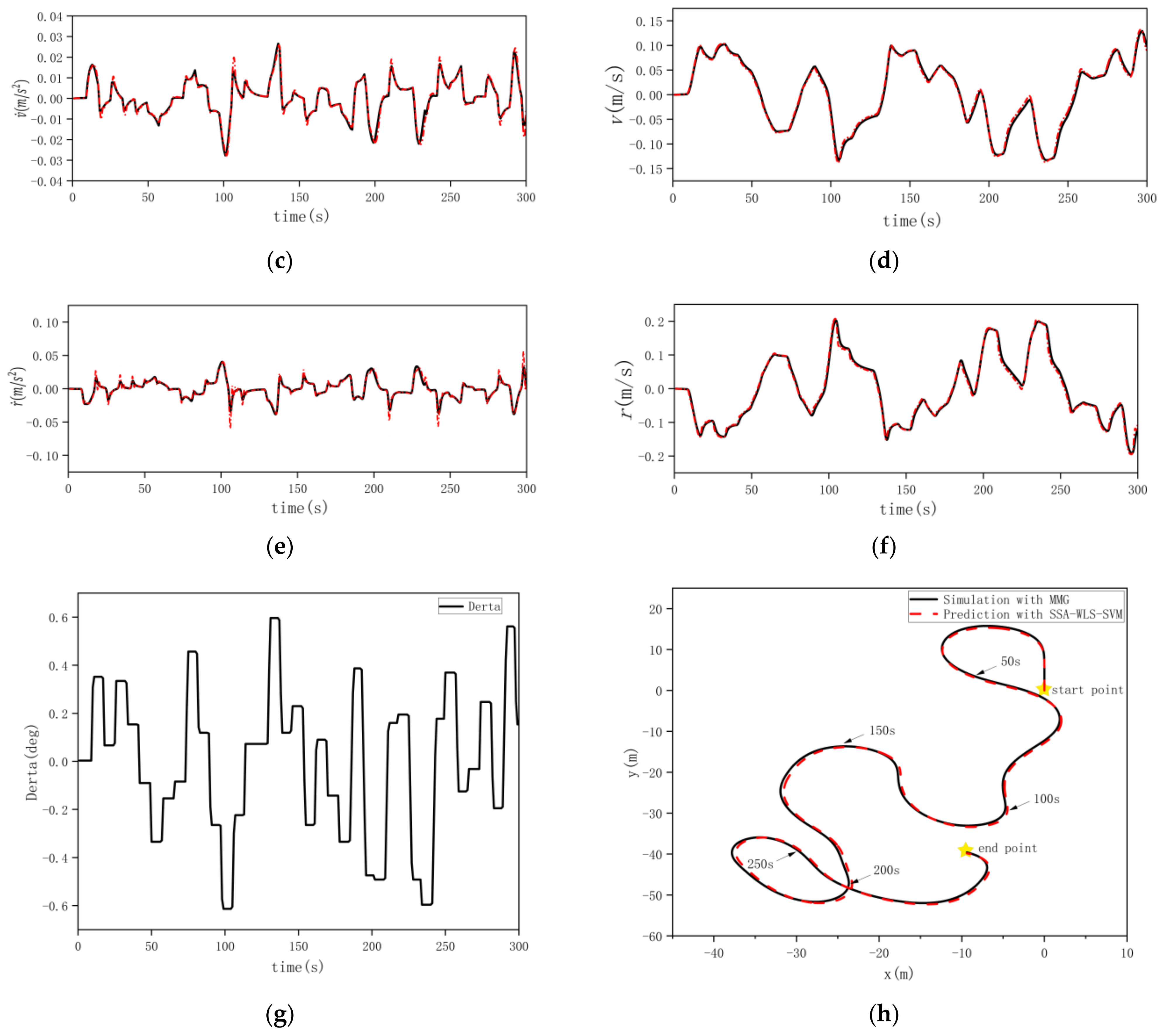
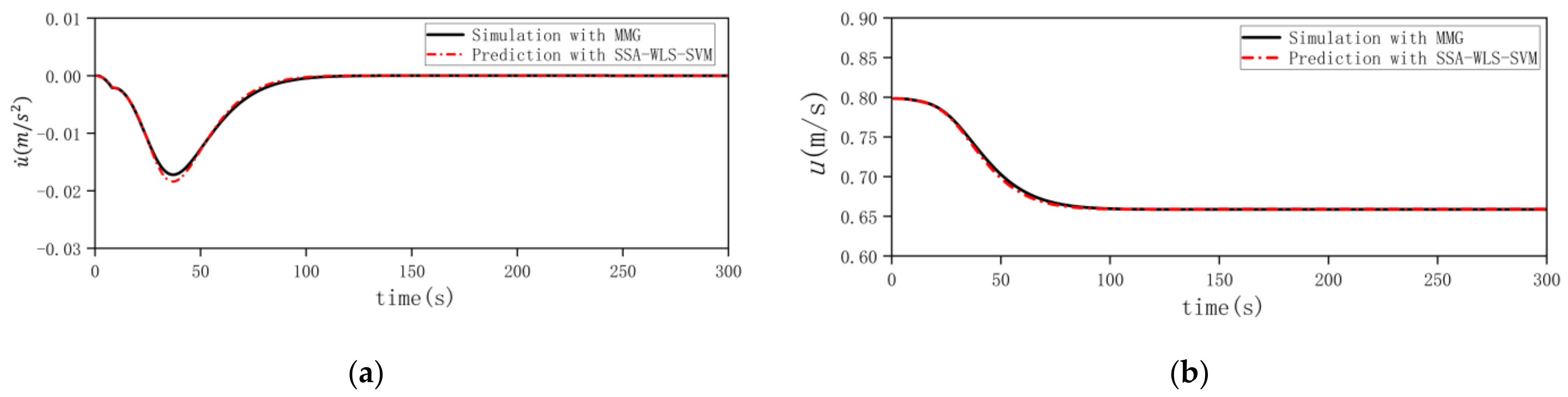
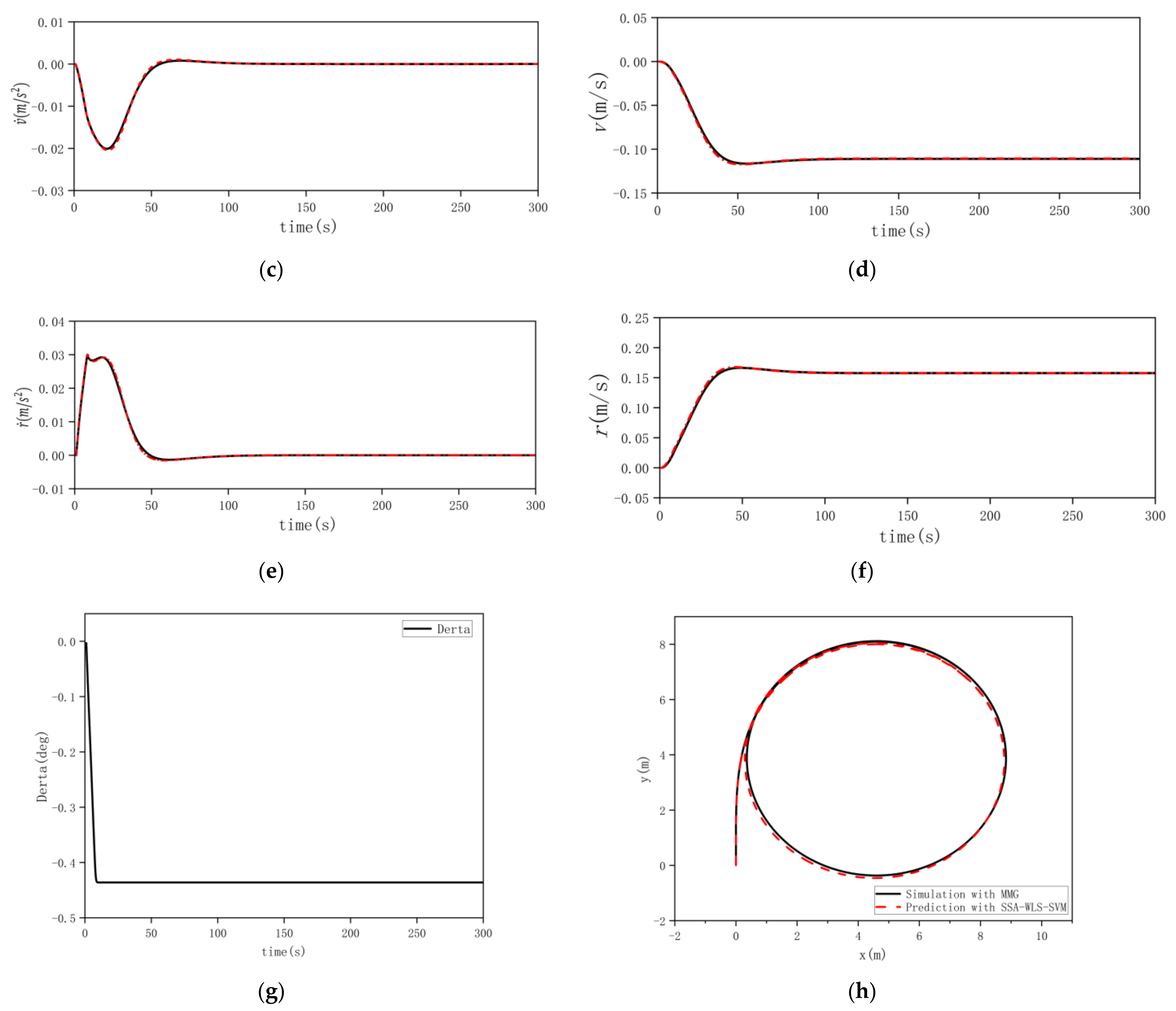
5.3. Model Generalization Verification
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Marzoughi, A.; Savkin, A.V. Autonomous navigation of a team of unmanned surface vehicles for intercepting intruders on a region boundary. Sensors 2021, 21, 297. [Google Scholar] [CrossRef] [PubMed]
- Fraga-Lamas, P.; Lopez-Iturri, P.; Celaya-Echarri, M.; Blanco-Novoa, O.; Azpilicueta, L.; Varela-Barbeito, J.; Falcone, F.; Fernandez-Carames, T.M. Design and empirical validation of a bluetooth 5 fog computing based industrial CPs architecture for intelligent industry 4.0shipyard workshops. IEEE Access 2020, 8, 45496–45511. [Google Scholar] [CrossRef]
- Yuan, X.Y.; Huang, C.Y.; Peng, Y.; Qu, D.; Liu, D. Hierarchical model identi6cation method for unmanned surface vehicle. J. Shanghai Univ. (Nat. Sci. Ed.) 2020, 26, 896–908. [Google Scholar]
- Bi, H.; Gao, C.; Ma, Y. Research on the legal status of un-manned surface vehicle. J. Phys. Conf. 2018, 1069, 012004. [Google Scholar] [CrossRef]
- Yu, J.B.; Hu, Z.Q.; Gen, L.B.; Yang, Y. Prediction Method Research on Motion Attitude of Unmanned Semi—Submersible Vehicle. Comput. Integr. Manuf. Syst. 2018, 35, 251–256. [Google Scholar] [CrossRef]
- Jiang, F.; Li, Y.B.; Yan, F.C.; Gong, J.Y.; Wang, M.Y. Prediction and characteristics of maneuvering performance for asymmetric catamaran based on OpenFOAM. Shipbuild. China 2021, 62, 14–24. [Google Scholar]
- Liu, Y.; Zou, L.; Zou, Z.; Guo, H. Predictions of ship maneuverability based on virtual captive model tests. Eng. Appl. Comput. Fluid Mech. 2018, 12, 334–353. [Google Scholar] [CrossRef]
- Wang, X.; Zou, Z.; Xu, F. Modeling of ship manoeuvring motion in 4 degrees of freedom based on support vector machines. In Proceedings of the International Conference on Offshore Mechanics and Arctic Engineering, Nantes, France, 9–15 June 2013; American Society of Mechanical Engineers: Houston, TX, USA, 2013; Volume 55430, p. V009T12A030. [Google Scholar]
- Carrillo, S.; Contreras, J. Obtaining first and second order nomoto models of a fluvial support patrol using identification techniques. Ship Sci. Technol. 2018, 11, 19–28. [Google Scholar] [CrossRef]
- Luo, W.L.; Zou, Z.J. Identification of response models of ship maneuvering motion using support vector machines. J. Ship Mech. 2007, 11, 832–838. [Google Scholar]
- Luo, W.L.; Zou, Z.J. Parametric identification of ship maneuvering models by using support vector machines. J. Ship Res. 2009, 53, 19–30. [Google Scholar] [CrossRef]
- Luo, W.L.; Zou, Z.J. Analysis of Captive Model Oblique Towing Test by Using Least Squares Support Vector Machines. Shipbuild. China 2010, 51, 10–14. [Google Scholar]
- Xu, H.; Soares, C.G. Hydrodynamic coefficient estimation for ship manoeuvring in shallow water using an optimal truncated LS-SVM. Ocean Eng. 2019, 191, 106488. [Google Scholar] [CrossRef]
- Xu, H.; Hinostroza, M.A.; Wang, Z.; Guedes Soares, C. Experimental investigation of shallow water effect on vessel steering model using system identification method. Ocean Eng. 2020, 199, 106940. [Google Scholar] [CrossRef]
- Xu, H.; Hassani, V.; Guedes Soares, C. Uncertainty analysis of the hydrodynamic coefficients estimation of a nonlinear manoeuvring model based on planar motion mechanism tests. Ocean Eng. 2019, 173, 450–459. [Google Scholar] [CrossRef]
- Pandey, J.; Hasegawa, K. Study on turning manoeuvre of catamaran surface vessel with a combined experimental and simulation method. IFAC-PapersOnLine 2016, 49, 446–451. [Google Scholar] [CrossRef]
- Luo, W.; Zhang, Z. Modeling of ship maneuvering motion using neural network. J. Mar. Sci. Appl. 2016, 15, 426–432. [Google Scholar] [CrossRef]
- Liu, C.D.; Zhang, H.; Han, Y. Black-box modeling and prediction of ship maneuverability based on least square support vector machine. J. Ship Mech. 2013, 17, 872–877. [Google Scholar]
- Xu, F.; Zou, Z.J.; Xu, X.; Yin, J. Black-box modeling of ship manoeuvring motion based on support vector machines. J. Beijing Univ. Aeronaut. Astronaut. 2013, 39, 1553–1557. [Google Scholar]
- Bonci, M.; Viviani, M.; Broglia, R.; Dubbioso, G. Method for estimating parameters of practical ship manoeuvring models based on the combination of RANSE computations and System Identification. Appl. Ocean. Res. 2015, 52, 274–294. [Google Scholar] [CrossRef]
- Sun, X.L.; Xu, F.; Huang, C.; Yang, C.L. Black-box modeling of underwater vehicle’s maneuvering motion based on model test. Ship Sci. Technol. 2018, 40, 75–77,129. [Google Scholar] [CrossRef]
- He, H.; Zou, Z. Black-Box Modeling of Ship Maneuvering Motion Using System Identification Method Based on BP Neural Network. In Proceedings of the ASME 2020 39th International Conference on Ocean, Offshore and Arctic Engineering, Virtual, Online, 3–7 August 2020; Volume 6B, p. V06BT06A037. [Google Scholar] [CrossRef]
- He, H.W.; Wang, Z.; Zou, Z.J.; Liu, Y. System Identification Based on Completely Connected Neural Networks for Black-Box Modeling of Ship Maneuvers. In Advances in Guidance, Navigation and Control; Yan, L., Duan, H., Yu, X., Eds.; Lecture Notes in Electrical Engineering; Springer: Singapore, 2022; Volume 644. [Google Scholar] [CrossRef]
- Zhang, Y.Y.; Wang, Z.H.; Zou, Z.J. Black-box modeling of ship maneuvering motion based on multi-output nu-support vector regression with random excitation signal. Ocean. Eng. 2022, 257, 111279. [Google Scholar] [CrossRef]
- Liu, Y.; Xue, Y.; Huang, S.; Xue, G.; Jing, Q. Dynamic Model Identification of Ships and Wave Energy Converters Based on Semi-Conjugate Linear Regression and Noisy Input Gaussian Process. J. Mar. Sci. Eng. 2021, 9, 194. [Google Scholar] [CrossRef]
- Gupta, P.; Rasheed, A.; Steen, S. Ship performance monitoring using machine-learning. Ocean. Eng. 2022, 254, 111094. [Google Scholar] [CrossRef]
- Gu, S.; Zhu, M.; Chen, G.; Wen, Y.; Knoll, A. Computing position error margin for a USV due to wind and current with a trajectory model. Ocean. Eng. 2022, 262, 111950. [Google Scholar] [CrossRef]
- A robust localization algorithm in wireless sensor networks. Comput. Sci. 2008, 2, 438–450. [CrossRef]
- Gezici, S.; Kobayashi, H.; Poor, H.V. Non-parametric non-line-of-sight identification. In Proceedings of the 2003 IEEE 58th Vehicular Technology Conference, VTC 2003-Fall (IEEE Cat. No.03CH37484), Orlando, FL, USA, 6–9 October 2003; Volume 4, pp. 2544–2548. [Google Scholar]
- Ji, Y.B.; Qin, S.R.; Tang, B.P. Digital Filtering with Zero Phase Error. J. Chongqing Univ. (Nat. Sci. Ed.) 2000, 23, 4–7. [Google Scholar] [CrossRef]
- Savitzky, A.; Golay, M.J.E. Smoothing and differentiation of data by simplified least squares procedures. Anal. Chem. 1964, 36, 1627–1639. [Google Scholar] [CrossRef]
- Xu, X.Y.; Zhong, T.Y. Construction and Realization of Cubic Spline Interpolation Function. Autom. Meas. Control. 2006, 25, 76–78. [Google Scholar] [CrossRef]
- Vapnik, V. The Nature of Statistical Learning Theory; Springer Science & Business Media: Berlin/Heidelberg, Germany, 1999. [Google Scholar]
- Zhou, Z.H. Machine Learning; Springer: Berlin/Heidelberg, Germany, 2016. [Google Scholar]
- Suykens JA, K.; Vandewalle, J. Least squares support vector machine classifiers. Neural Process. Lett. 1999, 9, 293–300. [Google Scholar] [CrossRef]
- Suykens, J.A.; De Brabanter, J.; Lukas, L.; Vandewalle, J. Weighted Least Squares support Vector Machines: Robustness and sparse approximation. Neurocomputing 2002, 48, 85–105. [Google Scholar] [CrossRef]
- Suykens, J.A.K.; Lukas, L.; Vandewalle, J. Sparse least squares Support Vector Machine classifiers. In Proceedings of the 2004 IEEE International Joint Conference on Neural Networks (IEEE Cat. No.04CH37541), Budapest, Hungary, 25–29 July 2004; pp. 37–42. [Google Scholar]
- Hampel, F.; Ronchetti, E.; Rousseeuw, P.; Stahel, W. Robust Statistics: The Approach Based on Influence Functions; Wiley: New York, NY, USA, 1986. [Google Scholar]
- Xue, J.K.; Shen, B. A novel swarm intelligence optimization approach: Sparrow search algorithm. Syst. Sci. Control. Eng. 2020, 8, 22–34. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Project | Value |
|---|---|
| Hall | |
| 1.5 | |
| 0.444 | |
| 0.107 | |
| 0.395 | |
| −0.12 | |
| −0.3 | |
| 3.947 | |
| 0.35 | |
| Propeller | |
| 0.05 | |
| 5 | |
| Rudder | |
| 0.001675 | |
| 0.05 | |
| Hydrodynamic Derivative | Calculated Value |
|---|---|
| −0.0026 | |
| −0.000700 | |
| 0.002500 | |
| −0.001800 | |
| 0.002744 | |
| −0.002807 | |
| 0.01247 | |
| −0.01471 | |
| 0.112200 | |
| −0.006399 | |
| −0.006952 | |
| 0.003013 | |
| −0.000467 | |
| −0.001708 | |
| −0.000261 | |
| −0.005687 | |
| −0.013020 | |
| −0.015600 | |
| −0.001047 |
| Datasets | Details of Dataset |
|---|---|
| Training sets | random maneuvering dataset No.1 |
| Test sets | random maneuvering dataset No.2 |
| Generalized set | random maneuvering dataset No.2 |
| 25° turning dataset No.3 |
| Type of Test | RMSE | CC | ||||
|---|---|---|---|---|---|---|
| u | v | r | u | v | r | |
| random maneuver set1 | 4.92 × 10−3 | 5.43 × 10−3 | 1.07 × 10−2 | 0.99383 | 0.99696 | 0.99382 |
| random maneuver set2 | 4.25 × 10−3 | 7 × 10−3 | 1.08 × 10−2 | 0.9880 | 0.9915 | 0.9878 |
| 25° turning circle maneuver set | 2.15 × 10−3 | 1.19 × 10−3 | 1.64 × 10−3 | 0.9989 | 0.9991 | 0.9990 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Song, L.; Hao, L.; Tao, H.; Xu, C.; Guo, R.; Li, Y.; Yao, J. Research on Black-Box Modeling Prediction of USV Maneuvering Based on SSA-WLS-SVM. J. Mar. Sci. Eng. 2023, 11, 324. https://doi.org/10.3390/jmse11020324
Song L, Hao L, Tao H, Xu C, Guo R, Li Y, Yao J. Research on Black-Box Modeling Prediction of USV Maneuvering Based on SSA-WLS-SVM. Journal of Marine Science and Engineering. 2023; 11(2):324. https://doi.org/10.3390/jmse11020324
Chicago/Turabian StyleSong, Lifei, Le Hao, Hao Tao, Chuanyi Xu, Rong Guo, Yi Li, and Jianxi Yao. 2023. "Research on Black-Box Modeling Prediction of USV Maneuvering Based on SSA-WLS-SVM" Journal of Marine Science and Engineering 11, no. 2: 324. https://doi.org/10.3390/jmse11020324
APA StyleSong, L., Hao, L., Tao, H., Xu, C., Guo, R., Li, Y., & Yao, J. (2023). Research on Black-Box Modeling Prediction of USV Maneuvering Based on SSA-WLS-SVM. Journal of Marine Science and Engineering, 11(2), 324. https://doi.org/10.3390/jmse11020324