1. Introduction
Traditional large-scale aquaculture vessels are primarily categorized into two forms: closed aquaculture vessels and net cage aquaculture platforms. Closed aquaculture vessels are typically converted from barges, with the middle section of the compartment transformed into a breeding warehouse [
1]. The advantages of this approach include ease of towing and the ability to select breeding areas conveniently. However, it comes with the drawback of requiring a more complex setup involving specialized pump facilities for internal and external seawater exchange. On the other hand, net cage aquaculture platforms are generally semisubmersible structures [
2]. These platforms consist of trusses, floats, and nets, offering the benefit of a simple structure and a large aquaculture area. However, they are not suitable for towing, and they must withstand substantial wave loads and wind forces. This is primarily because their structures are typically square, round, or hexagonal in shape. To better accommodate both towing and breeding requirements, a new type of truss-floating aquaculture vessel has emerged in recent years.
A truss-floating tank aquaculture vessel differs significantly from traditional aquaculture vessels. The midship area of the vessel consists of a full truss structure without any stiffened panels. The central truss structure, which connects the bow and stern floats, bears the vessel’s bending and torsional forces. The primary buoyancy of the vessel comes from the bow and stern floats. In the hydrodynamic and structural analysis of a truss-floating aquaculture vessel, the industry often relies on ship-related codes, standards, and guidelines to evaluate wave loads and hull performance. Additionally, offshore structure codes are utilized to assess the vessel’s structural integrity. This approach is adopted because there has not yet been a dedicated code developed for truss-floating aquaculture vessels. In practice, when wave loads are calculated according to ship standards, the computed bending and torsional moments can deviate significantly due to the water permeability in the central truss-floating tank vessel. This divergence could lead to discrepancies in the vessel’s structural design.
For structural analysis, nowadays, vessels with unique structures or those exposed to complex forces require precise analysis of stress and deformation through the finite element method (FEM), ensuring the accuracy of such calculations and providing a solid foundation for safe and effective designs. For example, Xin [
3] used the PCL program of MSC PATRAN software to realize the automatic loading and load adjustment steps, which significantly improved the efficiency of the direct calculation of the hull structural strength. Rui [
4] used the MSC NASTRAN software to complete the analysis of the typical working conditions of a crane strength and stability calculations, providing a basis for the optimization of the hull structure. Nisi et al. [
5] carried out an analysis of the total longitudinal strength of a deep-sea mining vessel using DNV WADAM and summarized the evaluation method of the real longitudinal strength applicable to marine mining vessels. Wang et al. [
6] investigated the ultimate longitudinal strength of an ultralarge container ship by using an experimental and nonlinear FEM. The research delved into the progressive collapse behavior of these vessels, offering valuable insights into the structural design of various container ship types. Liu et al. [
7] calculated the maximum strength and fatigue strength of single-point mooring (SPM) cage floating ring under static and vibration loads based on the FEM of elastic modeling. The results indicate that reinforcing the double tubes or selecting suitable damping mechanisms increased the ultimate strength and fatigue resistance of SPM cage floating rings.
On the other hand, hydrodynamic models must be coupled with structural analysis to calculate wave-induced motions and loads. For instance, Yanagimoto et al. [
8] assessed the dry bulk cargo loads acting on the bottom plate using a coupled discrete element method (DEM) and FEM analysis with a simplified ship model. The computational results demonstrate that when the bottom plate is elastic, more force is concentrated near the edge of the bottom plate, while less force is distributed around the center. In contrast, the loads are uniformly distributed when the bottom plate is rigid. Liu et al. [
9] investigated the pile–soil interactions of horizontal ice with monopile offshore wind turbines using the coupled viscous element method (VEM) and FEM with the LS-DYNA finite element code. They provide a valuable reference for evaluating the dynamic characteristics and damage of OWT structures under wind and ice conditions. Zhao et al. [
10] analyzed the ultimate strength of a hull girder model with large openings, comparing failure modes, load displacements, and ultimate load results based on the nonlinear finite element method with those of the experimental model. Yang et al. [
11] achieved numerical simulation and evaluation under simultaneous vertical, horizontal, and torsional vibrations by employing a three-dimensional equivalent modeling approach. Bakica et al. [
12] proposed a novel numerical scheme that couples OpenFOAM and NASTRAN to enhance the transfer accuracy of hydrodynamic loads from hydrodynamic CFD meshes to structural finite element meshes.
It is worth emphasizing that within the hydrodynamic and structural analysis of ship hulls, the ultimate longitudinal strength is a critical aspect in assessing their safety. This strength is typically evaluated under conditions of hogging or sagging with monotonically increasing bending moments. For example, Manikandan and Arun [
13] utilized three different methods to determine the buckling properties and strength of reinforced plates. They conducted a detailed parametric study to assess the impact of plate thickness and various factors, finding that spacer plates increased the stiffness and torsional stiffness of the members. Panda and Ramachandra [
14] performed linear buckling analysis on rectangular plates without stiffening ribs by establishing boundary conditions and obtaining critical buckling loads. Their results indicate that the absence of stiffening ribs reduced buckling resistance. Liu and Wang [
15] investigated the buckling behavior of reinforced thin plates with multiple stiffening ribs. They concluded that an increase in the number of stiffening ribs in a uniformly arranged thin plate led to an overall improvement in the ultimate strength of the reinforced plate. Bedair [
16] conducted a stability analysis of thin plates with multiple stiffening ribs and compared the results with those obtained using the finite element method. Taysi [
17] concluded that variations in the thickness of the plate and stiffening ribs, which constitute dimensional optimization parameters, had no significant effect on the critical buckling load. However, shape optimization, involving changes in the location of stiffening ribs, significantly influenced the critical buckling load.
For the optimization analysis of truss structures, several researchers have introduced innovative algorithms. Cheng et al. [
18] presented a new variant of coordinated search algorithms tailored to optimize discrete truss structures under various loading conditions. Li et al. [
19] proposed a heuristic particle swarm optimization algorithm designed for truss structures featuring discrete variables. Kaveh and Talatahari [
20] integrated particle swarm optimization with passive aggregation, ant colony optimization, and harmony search schemes, creating an efficient algorithm known as discrete heuristic particle swarm ant colony optimization. Ho-Huu et al. [
21] introduced an adaptive elite differential evolutionary algorithm specifically for optimizing truss structures with discrete design variables. Xiang et al. [
22] applied a simulated annealing algorithm to optimize discrete truss systems. Miguel et al. [
23] proposed an efficient single-stage firefly algorithm for the simultaneous optimization of truss structures concerning their dimensions, shapes, and topologies. Xue [
24] devised a novel heuristic algorithm aimed at addressing high nonlinear characteristics in the optimization process. Khatibinia and Yazdani [
25] introduced an enhanced version of the multigravitational search algorithm, known as the accelerated multigravitational search algorithm (AMGSA), which has demonstrated superior convergence and significantly reduced the number of structural analyses. Mortazavi [
26] introduced an auxiliary fuzzy decision-making mechanism to enhance the capabilities of majority decision element heuristic optimization techniques in tackling structural sizing and topology optimization problems. However, existing optimization efforts have primarily concentrated on ships and trusses independently, with no prior structural optimization work carried out for the new truss-floating tank aquaculture vessel in the existing literature.
To address this gap, we performed a structural optimization of a truss-floating aquaculture vessel in our prior research [
27,
28]. However, our optimization analysis was confined to a parameter optimization involving continuous design variables. Typically, the sole optimization objective is the weight of the entire ship structure, encompassing the fatigue analysis of truss joints [
27] and the assessment of buckling and yield strength [
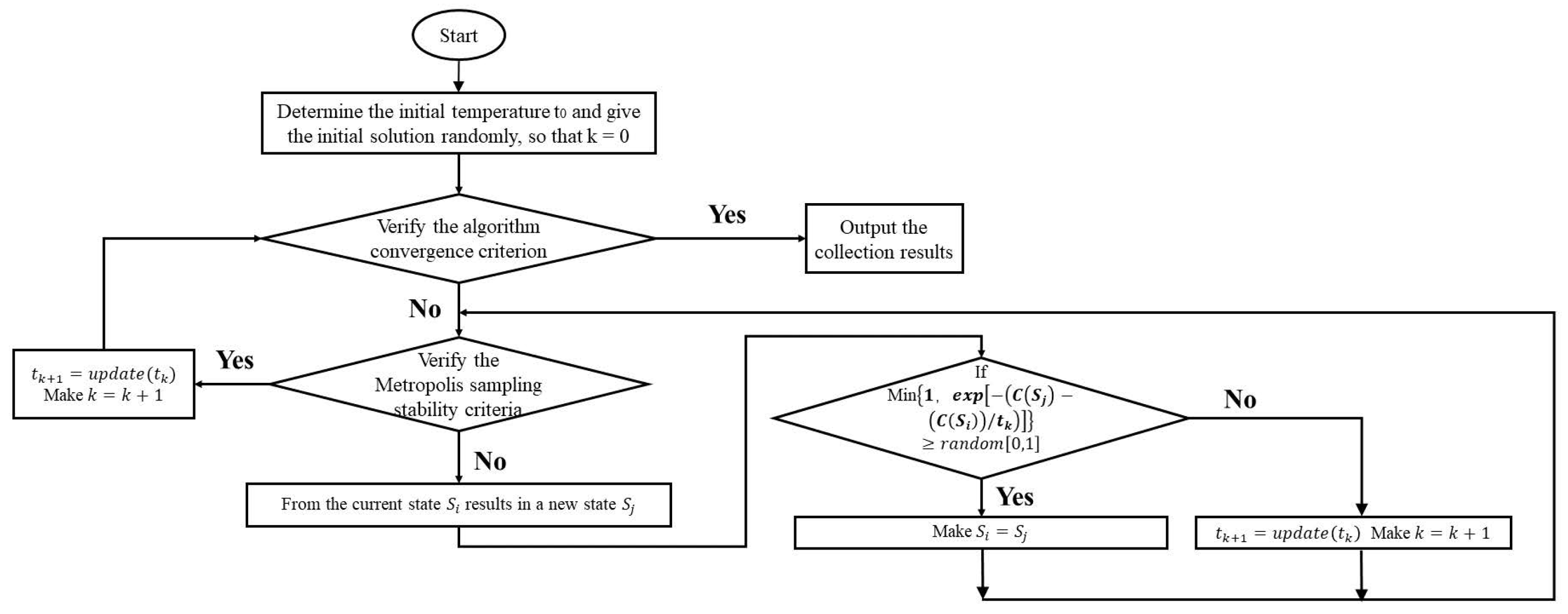
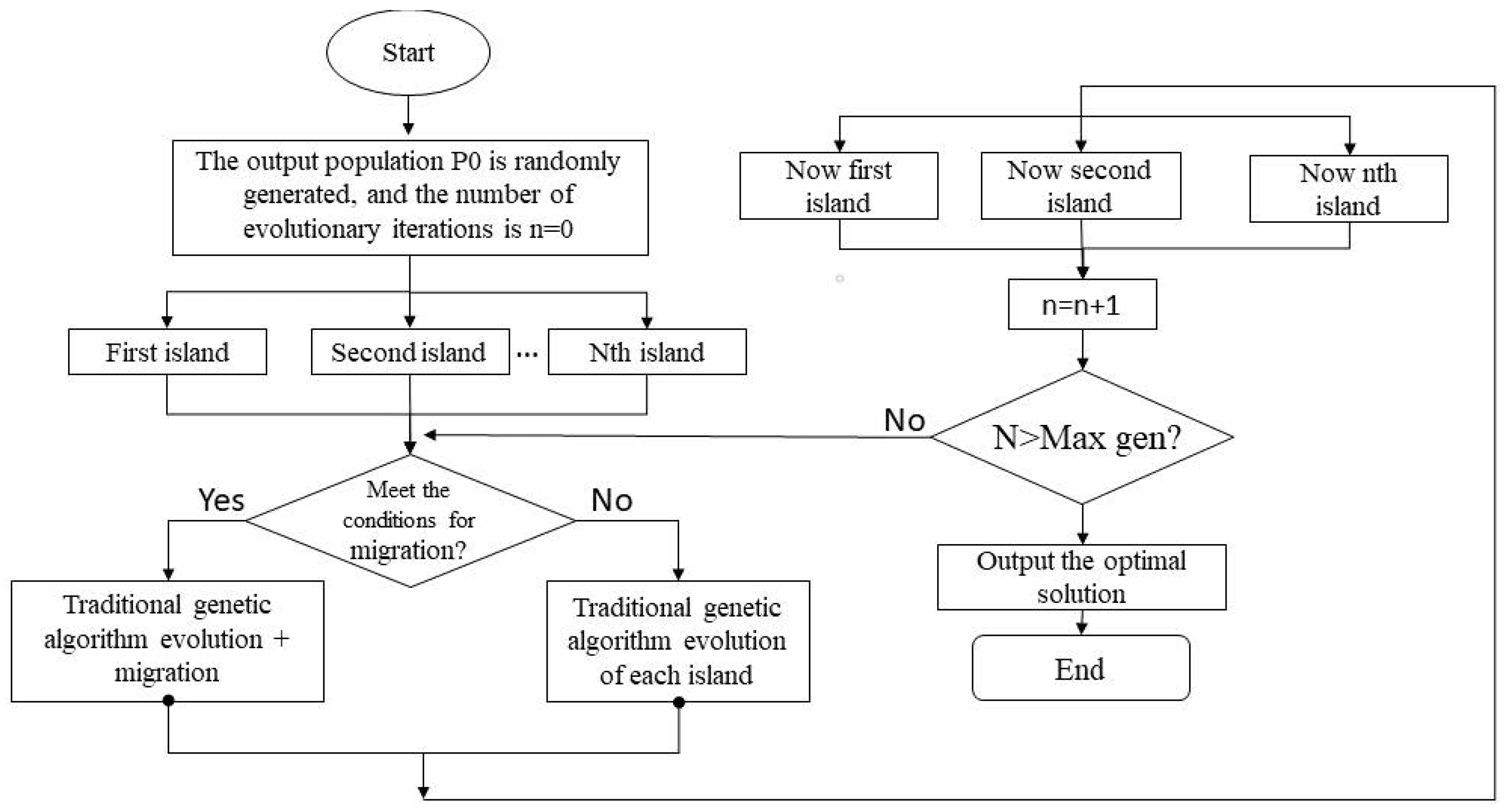
28]. In this paper, we apply the adaptive simulated annealing algorithm and multi-island genetic algorithm to optimize the maximum stress, maximum deformation, and overall weight of the vessel. This process includes the calculation of wave loads for two typical working conditions and the determination of wave parameters corresponding to the most demanding operational scenarios. We subsequently analyze the stress characteristics induced by wave forces to pinpoint areas and components in need of optimization. By following this comprehensive approach, we formulate a practical and feasible optimization scheme. This study aims to identify the most suitable algorithm for optimizing the truss structure of the aquaculture vessel, offering valuable insights for future aquaculture vessel design optimization.
3. Hydrodynamic Loads and Structural Strength Analysis
This section starts with providing the principal dimensions of the analyzed aquaculture vessel. Then, the wave loads acting on the aquaculture vessel are directly calculated using the hybrid hydrodynamic method. Finally, the structural strength of the aquaculture vessel is analyzed using the finite element method.
3.1. Particulars of the Aquaculture Vessel
The primary dimensions of the truss-floating tank aquaculture vessel are provided in
Table 1: length between perpendiculars
, waterline breadth
, depth midships
, and draught midships
. As depicted in
Figure 3, the FE model of the entire ship structure includes the bow pontoon, stern pontoon, and amidships truss structure. Plate members (such as outer plates, the main deck, and each deck) in the model are represented using shell elements, while buttresses and trusses are simulated using beam elements. The origin of the model is situated at the intersection of the transom plumb line and the bottom baseline. The x-axis points from the stern towards the bow in the positive direction, the y-axis extends from the ship’s midpoint towards the port side in the positive direction, and the z-axis goes from the bottom of the ship to the deck in the positive direction. The structural FE model comprises a total of 49,189 elements and 31,509 nodes.
In order to consider the influence of the net load on the strength of the structure, a crisscrossing cylindrical structure is built outside the floating body truss to make its force equal to that of the net load, so as to simulate the influence of the net load on the hull structure. Considering the fishing net structure in the Morrison model, the stressed area of the net model is equal to the actual net area. The Morison model of the central truss and net is shown in the right graph of
Figure 3 as well.
Two typical working conditions for towing and operation, corresponding to different draft depths and displacements, are analyzed. For each condition, a three-dimensional panel model, Morison model, and mass model of the vessel are constructed. Variations in the draft are simulated using different wet surface models, while changes in displacement are represented with different mass bar models. Different wave heights and wave directions are considered for each working condition, as outlined in
Table 2.
3.2. Hydrodynamic Load Analysis
The panel model, Morison model, and mass model are utilized to calculate the load transfer function and the extreme bending moment, as well as the torque of the ship under two typical working conditions. The choice of wave load calculation method depends on its applicability, considering factors such as wavelength and the scale of the floats. Consequently, Morison’s equation is used to calculate the wave loads for the middle truss structure, which comprises small-scale members. In contrast, diffraction theory is utilized to compute the wave loads for the bow and stern floats. The truss-floating aquaculture vessel is mainly composed of bow and stern floats, as well as an amidships truss structure. The midsection of the vessel consists entirely of tubular members, which leads to reduced resistance to hull bending and torsion. Therefore, the primary analysis focuses on vertical bending moments and torque.
By applying loads in each section using SESAM/HydroD, the whole vessel is divided into 20 stations, with a ship length of 129 m and rib spacing of 6.5 m. FR0 is set to be the last section of the transom deck cross-section, and FR20 is the foremost part of the bow pontoon. This process yields vertical wave bending moment (
) and wave torque (
) data. Typically, the maximum vertical bending moment occurs near the amidships, while the maximum torque arises at the 1/4 and 3/4 positions of the vessel. The main control load and its corresponding section are presented in
Table 3.
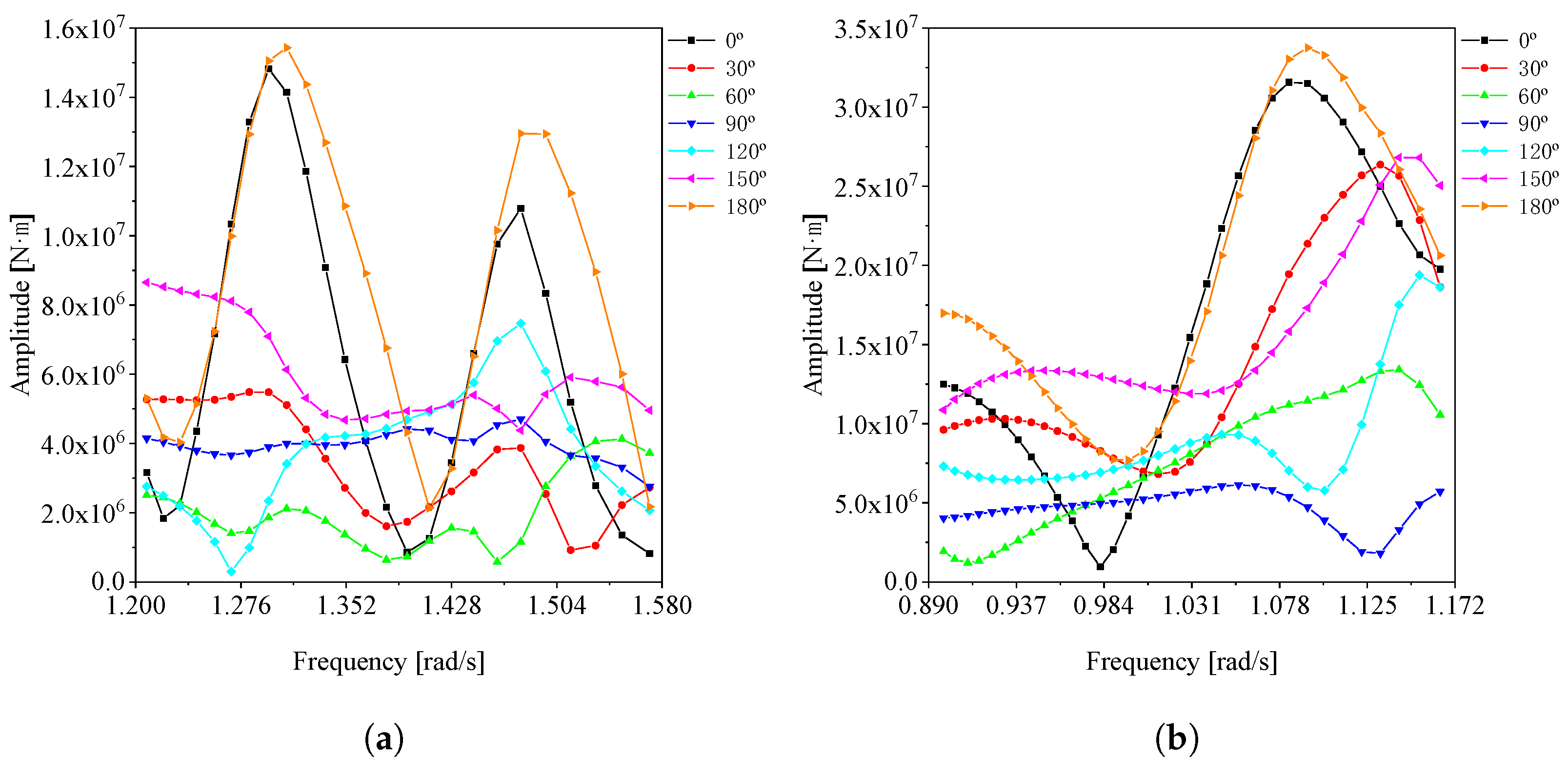
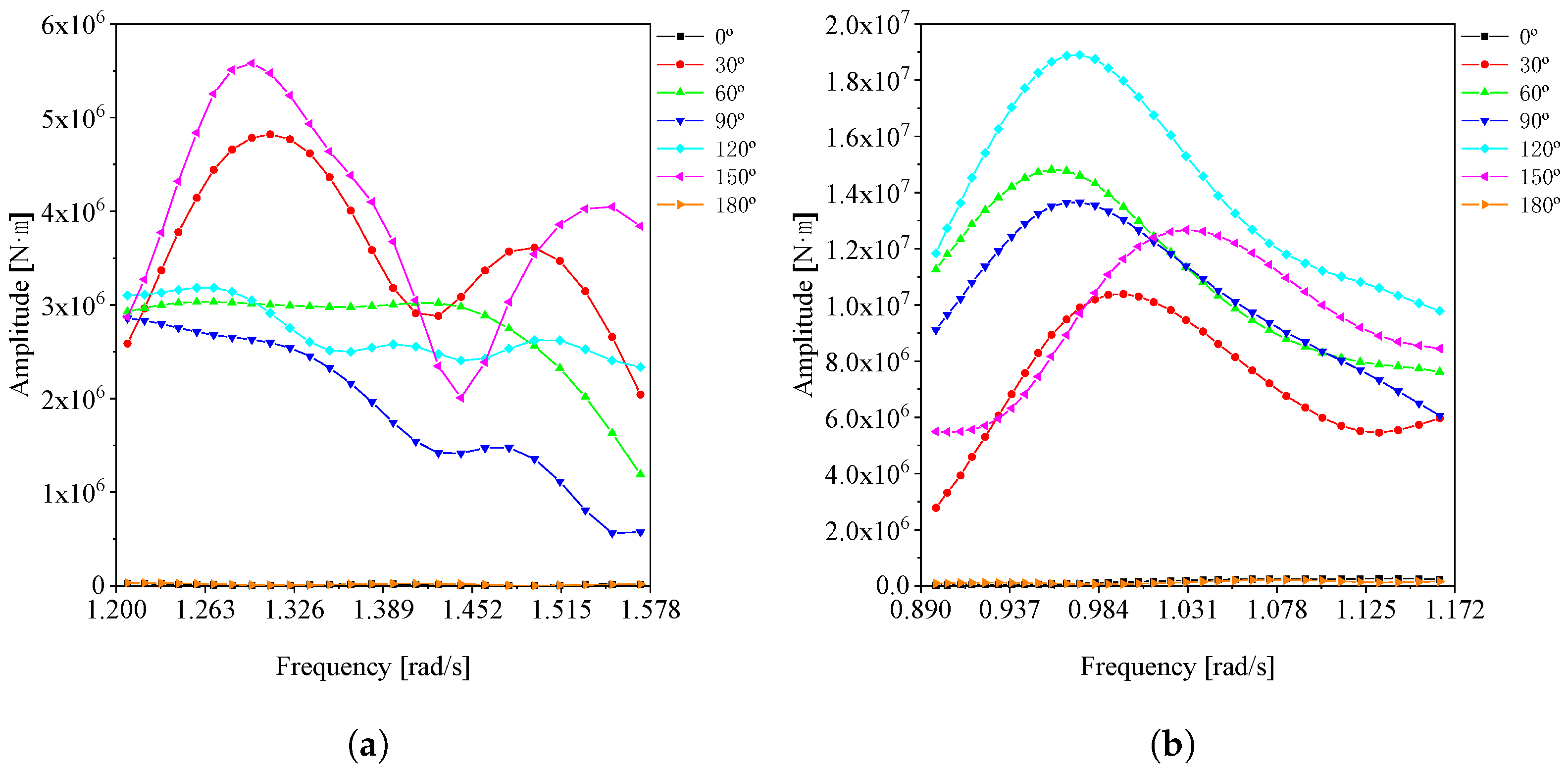
Considering the working conditions described above, the calculation includes the determination of vertical moment at the
section under various wave angles, as illustrated in
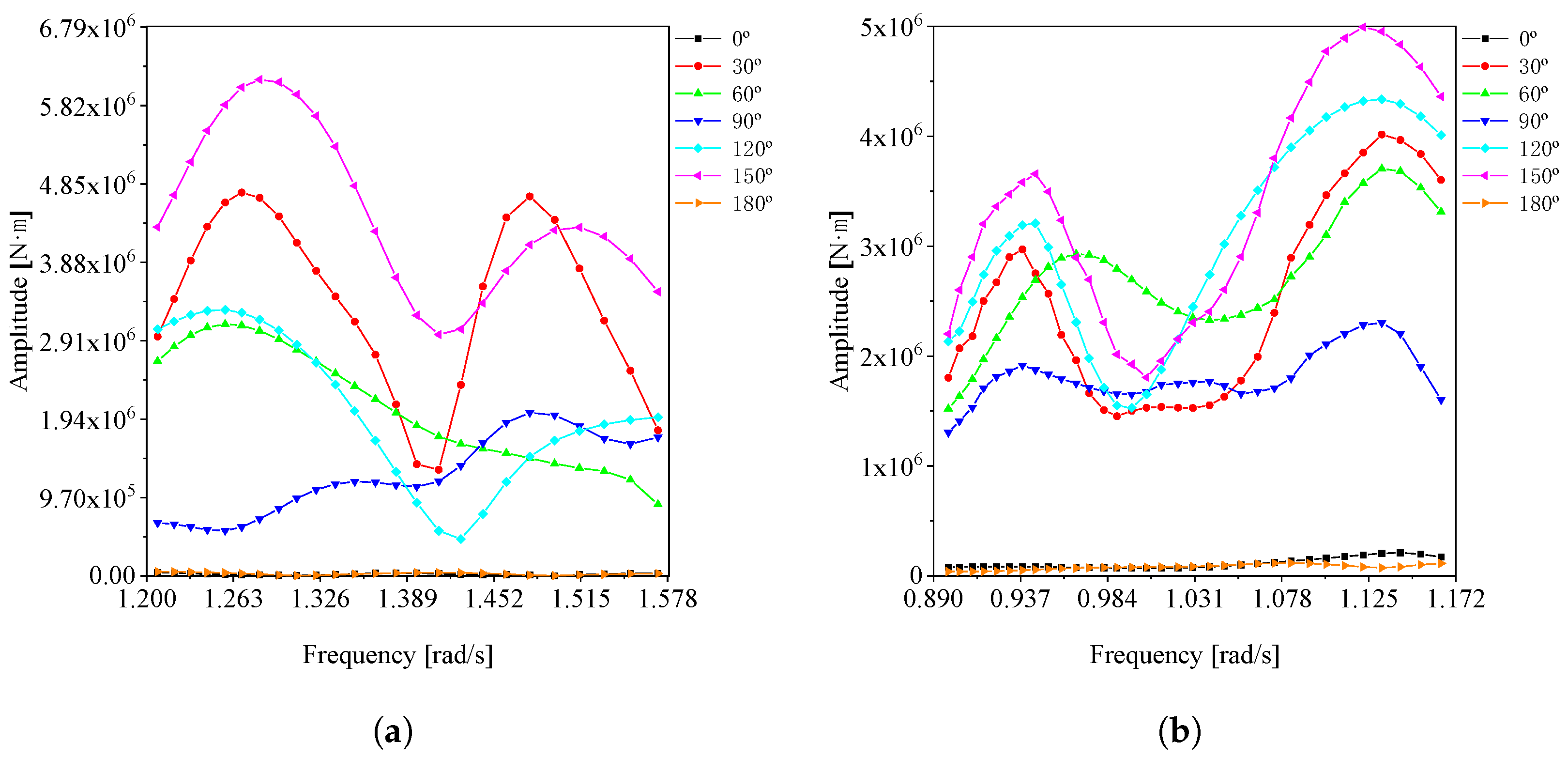
Figure 4. Furthermore, torque at the
section and the
section for different wave angles are computed and presented in
Figure 5 and
Figure 6.
Upon analyzing the data curves presented above, it becomes evident that within the selected period–frequency range, the bending moment and torque exhibit regional extreme values, as well as unique maximum values. According to the wave frequency, wave direction, and phase that correspond to the maximum amplitude of the bending moment and torque, we can derive the wave parameters for the worst-case scenario of each working condition. The outcomes are detailed in
Table 4.
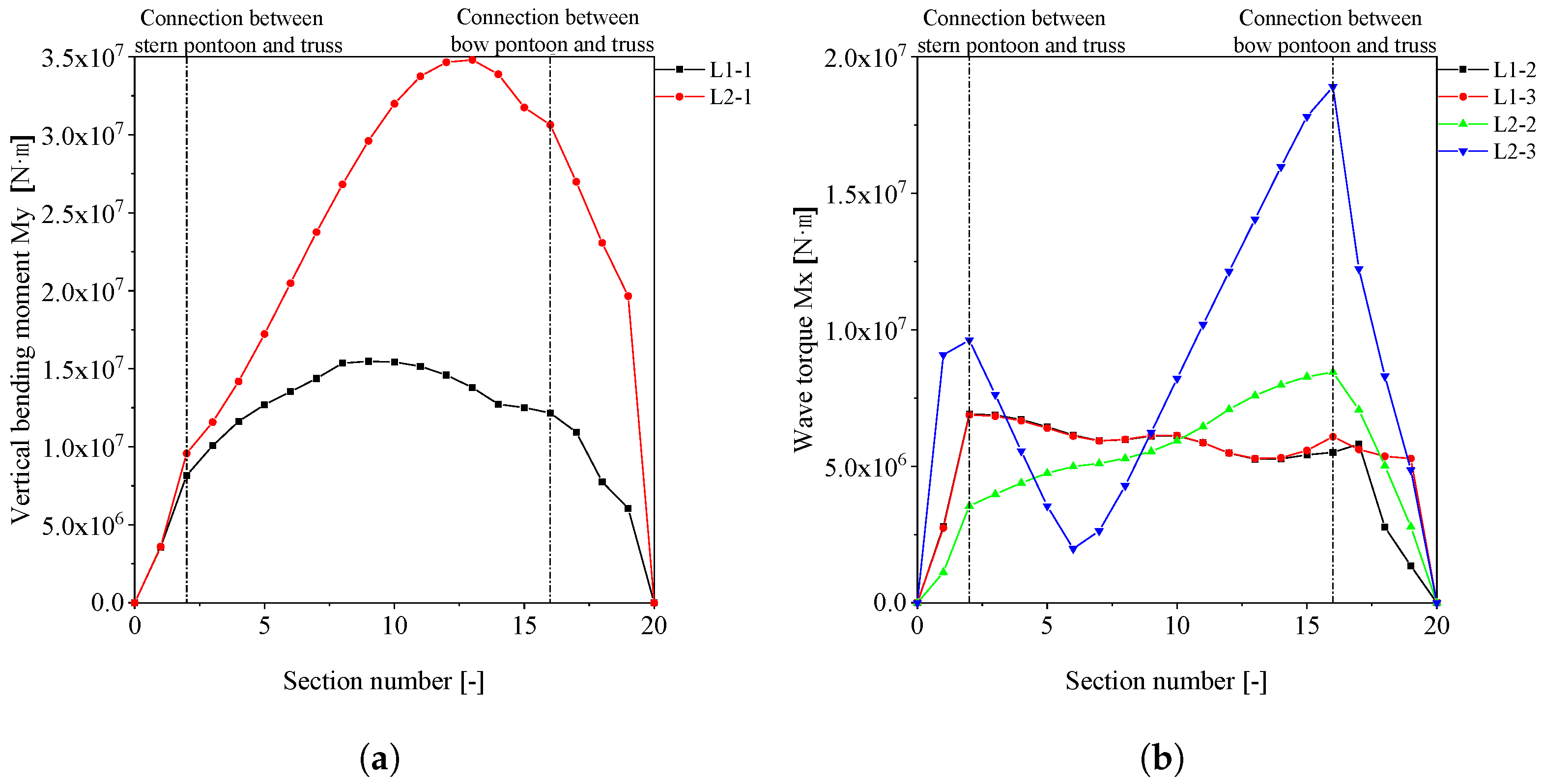
The wave loads of each section of the vessel are recalculated according to the most unfavorable wave parameters for each condition. And the vertical bending moments and wave torques at the 19 sections can be obtained for the towing and breeding conditions, as shown in
Figure 7.
Upon analyzing the vertical bending moment in both conditions, it becomes evident that the vertical bending moment exhibits a pattern of being smaller at both ends and larger in the middle, similar to the hull girder load curve. In the breeding condition, the maximum value of the vertical bending moment is observed at station 13 (84.5 m from the transom plumbline), with a magnitude of N·m. In the towing condition, the maximum vertical bending moment occurs at station 10 (65 m from the transom plumbline), with a value of N·m. The wave torques for conditions 1-2 and 1-3, under towing conditions, exhibit similar characteristics. The torque values are relatively high and change smoothly in the middle, whereas they are relatively low at both ends with rapid changes. Under the breeding condition, regional extremes are observed in both condition 2-3 and 2-2, specifically at station 2 and station 16. These correspond to the connections between the stern float box and the truss and the connection between the bow float box and truss, respectively. To increase the rigidity of the joint, strengthen the structural strength, and reduce the stress concentration at the joint, vertical and transverse brackets can be added inside the bow and stern pontoons. Additionally, the thickness of the pontoon plate and the diameter thickness of the truss joint should be increased.
3.3. Structural Strength Analysis
In this section, the structural strength of the vessel is assessed using equivalent design waves. The wave load corresponding to the wave parameters at the maximum vertical bending moment and wave torque is applied to the finite element model, and the structural strength is analyzed by SESTRA while considering the effects of mooring systems. The boundary conditions apply linear displacement constraints to avoid rigid hull movement without limiting the deformation of the model structure [
31]. The total longitudinal strength of the whole ship is analyzed according to the maximum vertical bending moment, and the torsional strength of the whole ship is analyzed according to the maximum wave torque. The results for stress are found in
Table 5. The analysis reveals that the highest axial stress appears in the maximum vertical bending moment load case, reaching 302 MPa. Conversely, the largest bending stress occurs in the maximum wave torque load case, peaking at 165 MPa. While the axial and bending stresses vary under different working conditions, it is noteworthy that the high-stress regions in both cases are situated at the connections between the left or right longitudinal trusses and the central crossbeam.
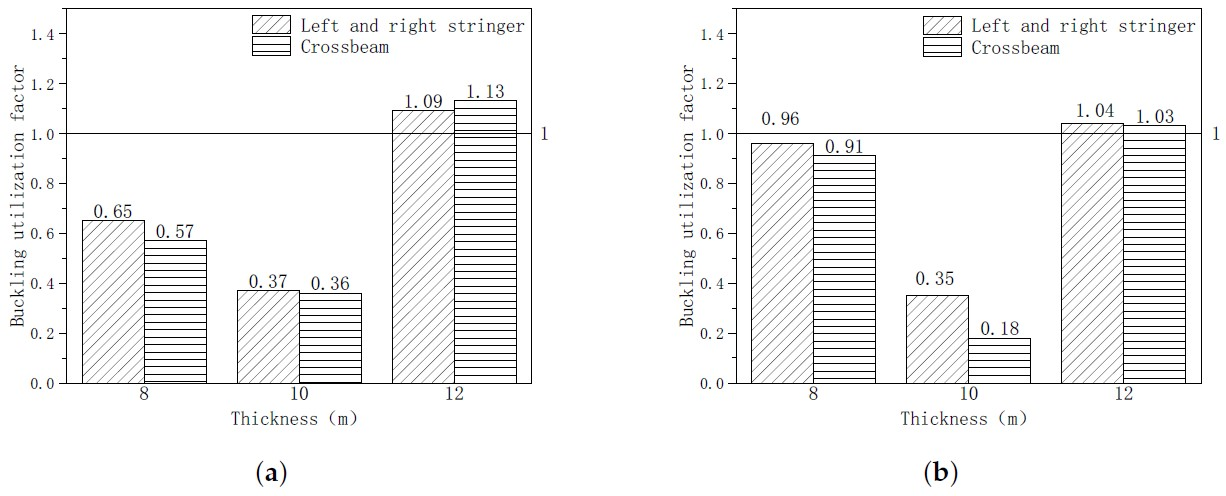
According to [
32], the beam–column buckling characteristics of the member should also be considered when checking the buckling of the member, that is, the buckling constancy of the tension–bending combination member and the compression–bending combination member. A local buckling check is carried out for beams of different positions and specifications. The check result is given in
Figure 8.
It is evident that, under the most challenging operational conditions, the 8 mm and 10 mm beams of the left and right stringers, as well as the middle crossbeam, fall within the safety parameters. The 10 mm beam members exhibit a substantial safety margin in both tensile and compressive stresses. However, the tensile flexural and compressive flexural utilization factors for the 12 mm beam members exceed 1, implying the possibility of flexural buckling. Notably, flexural buckling is likely to occur at the connections between the left and right stringer trusses and the central crossbeam. The subsequent section delves into the structural optimization of the midship truss.








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}