
Water-Tank and Semi-Field Experimental Investigation of a Hose Net Fish-Hauling Device for Next-Generation Set-Net Fishing




Abstract
:1. Introduction
- ●
- Evaluate and improve the floating-up condition of the hose net considering the effect of the box net.
- ●
- Assess the floating-up condition of the hose net under real sea conditions.
- ●
- Examine catch-hauling for the live fishes.
2. Models and Experimental Method
2.1. Hoes Net Model
2.2. Box Chamber Net Model
2.3. Setup of Models in the Water Tank
2.4. Semi-Field Experiment
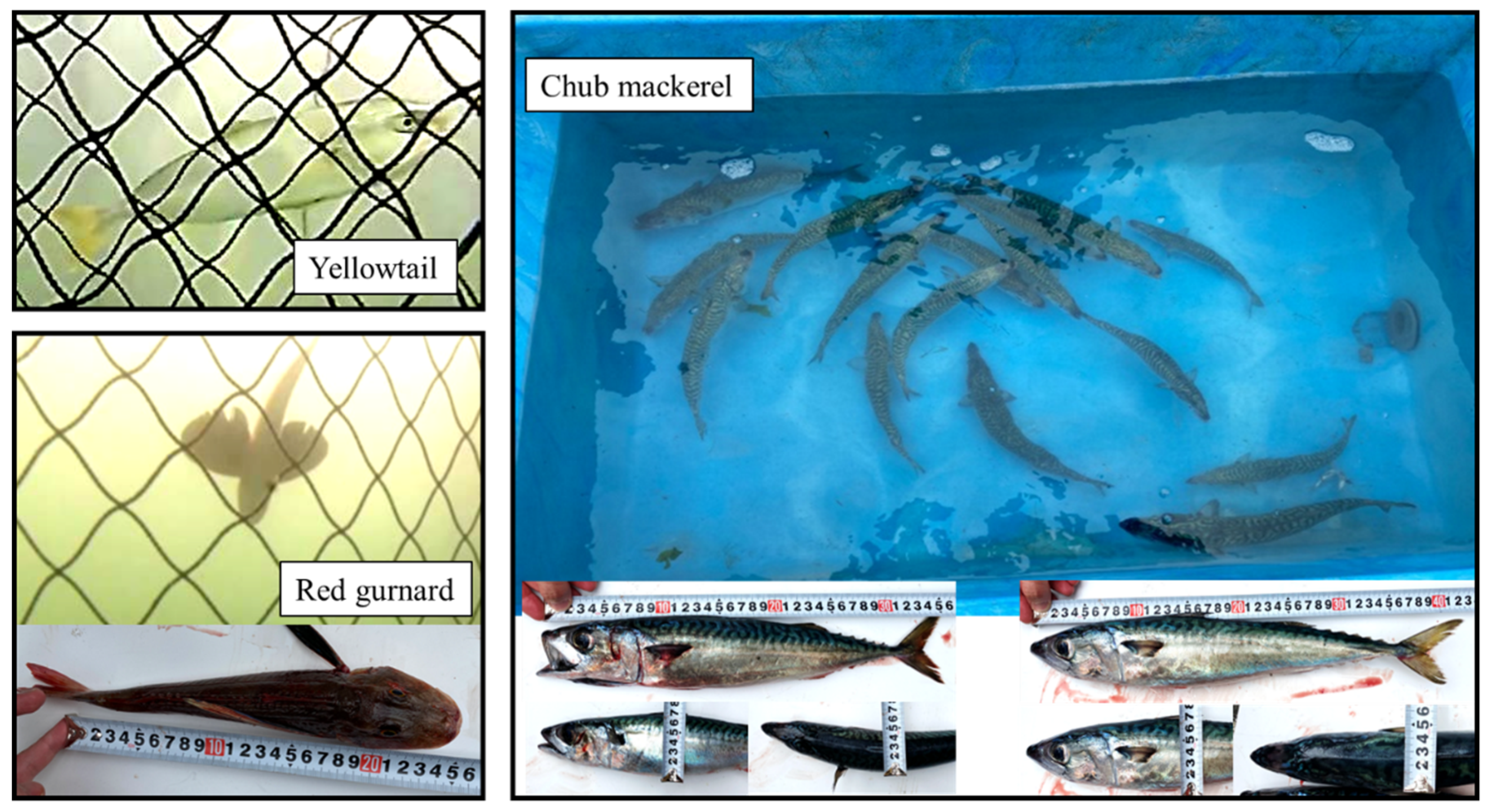
2.5. Catch-Hauling Tests
3. Results and Discusses of Water Tank Experiment
3.1. Single Hose Net Model
3.2. Hose Net Set with Box Net
4. Results and Discussion of Semi-Field Experiments
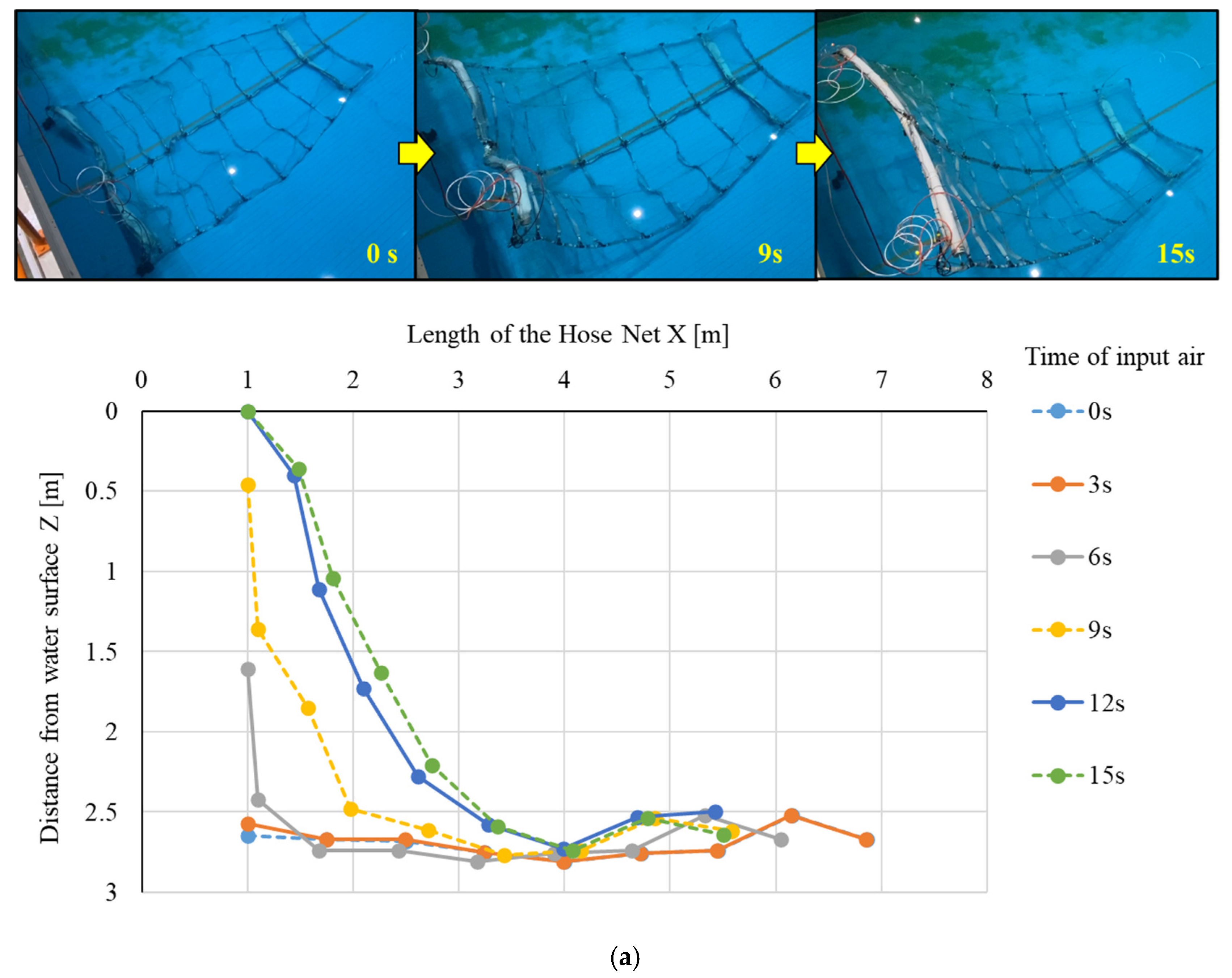
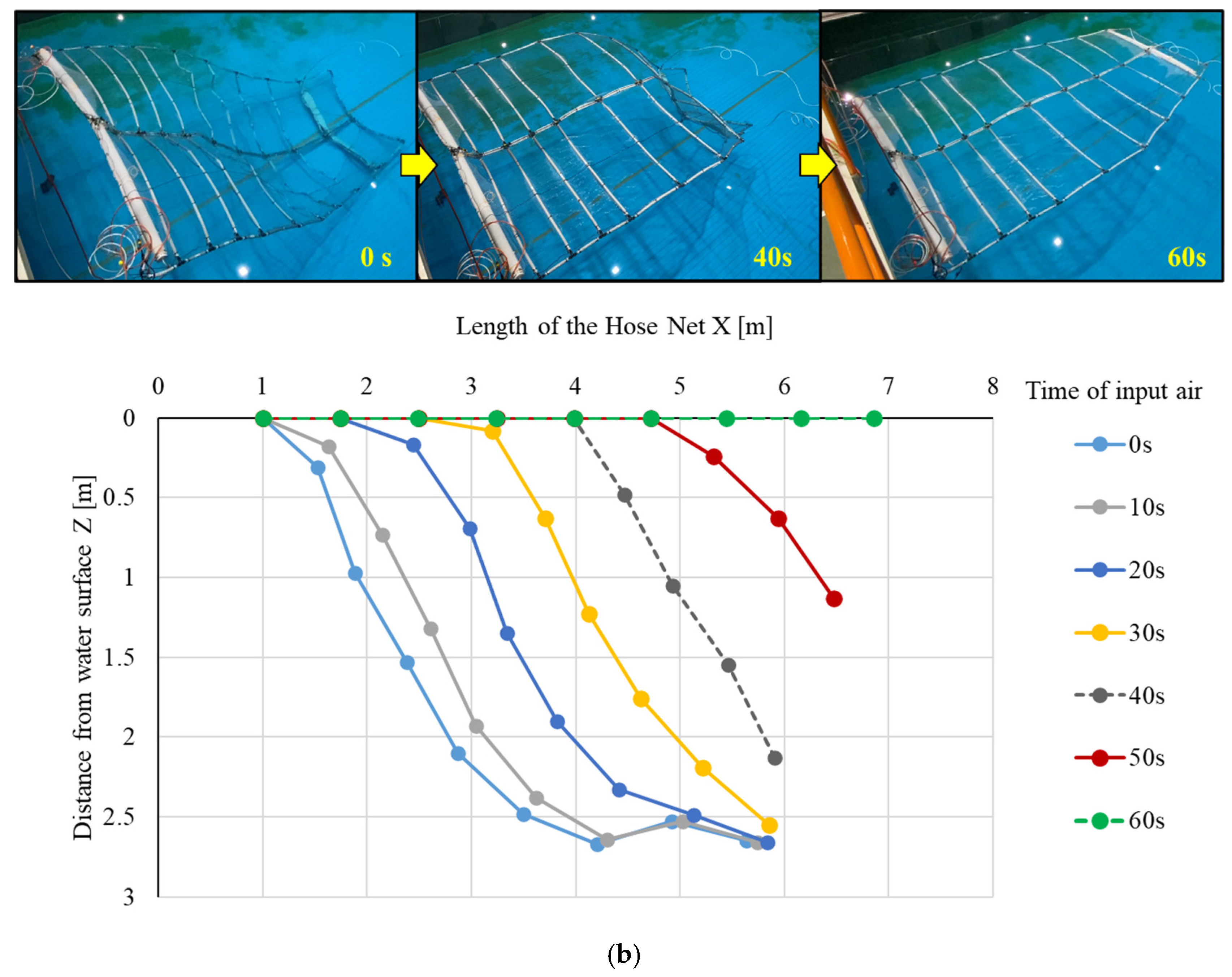
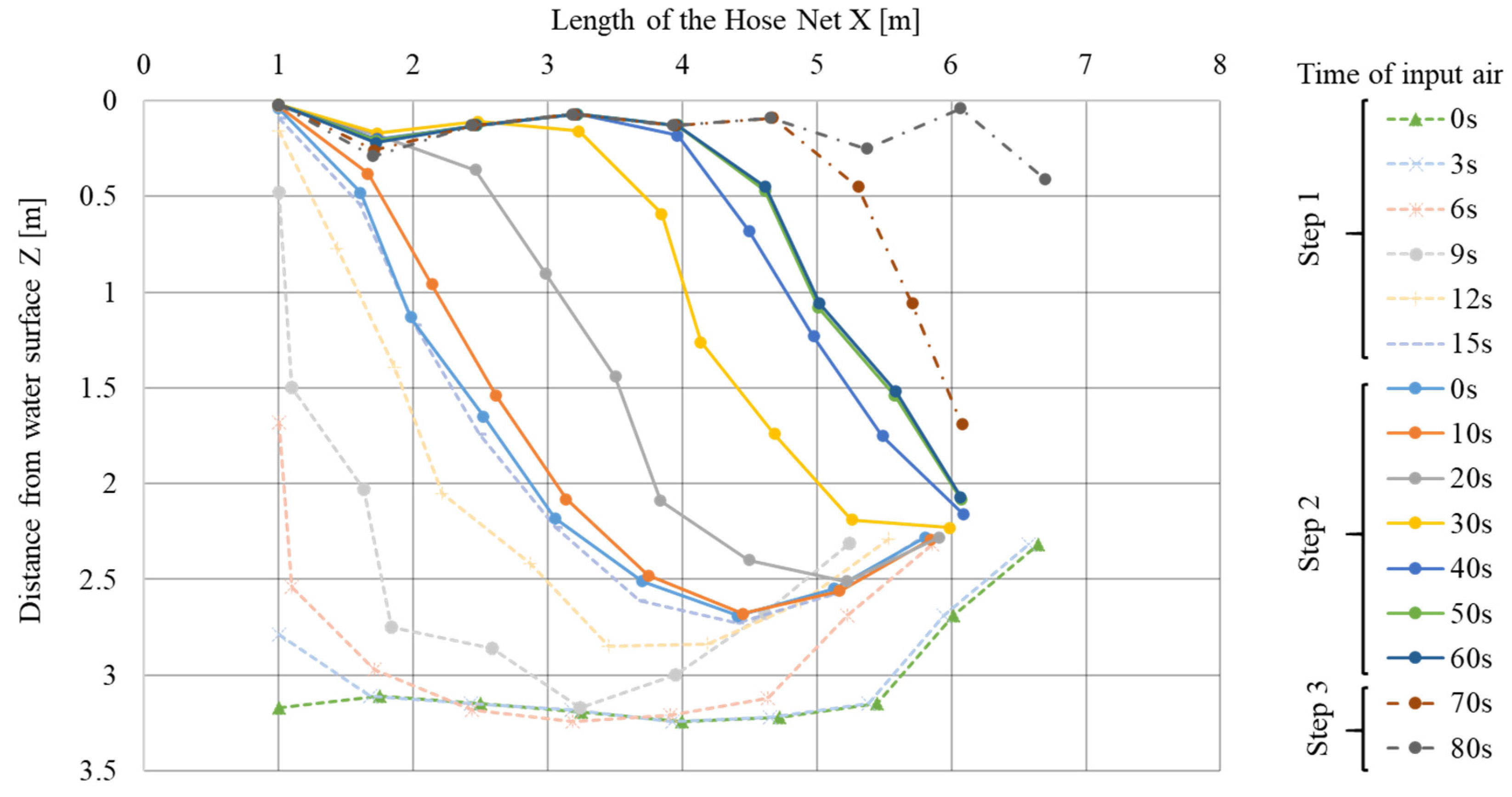
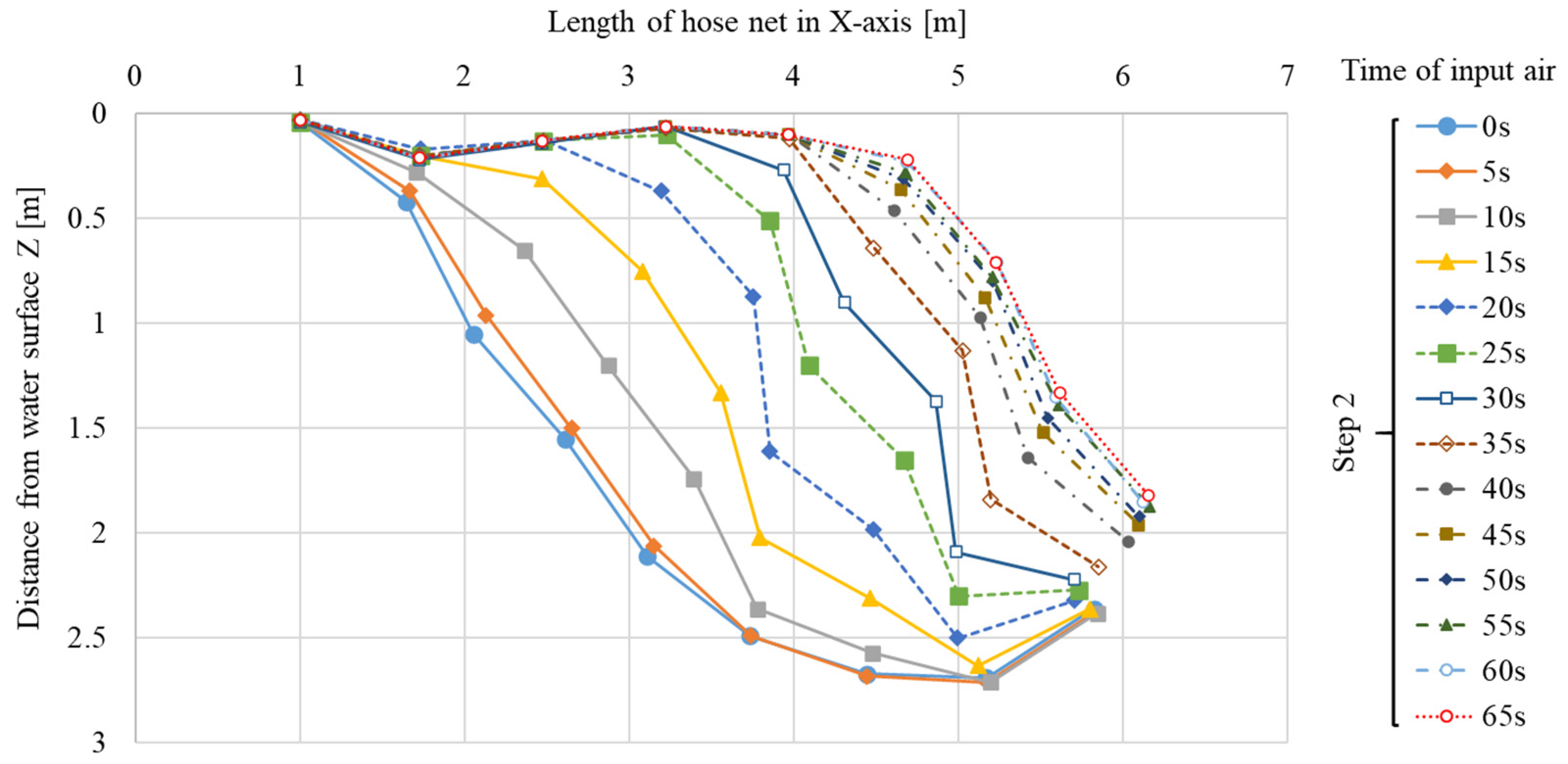
4.1. Floating-Up Performance of Hose Net
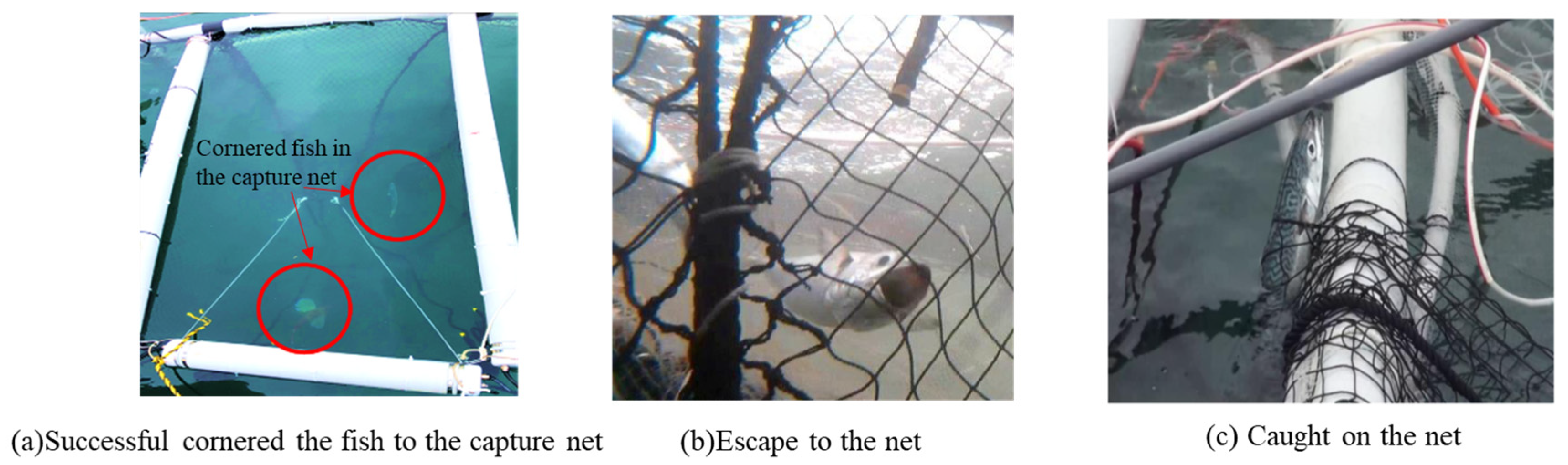
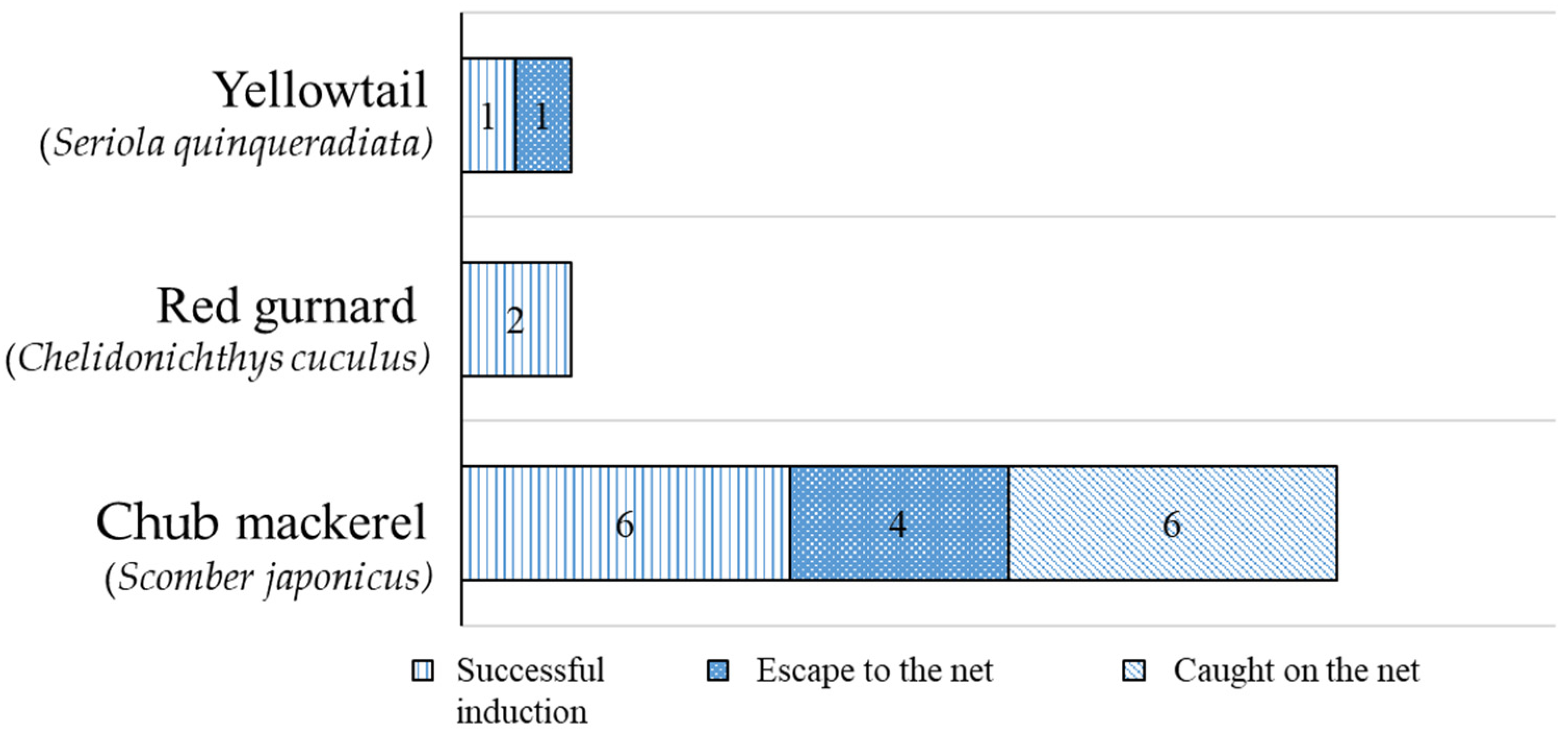
4.2. Catch-Hauling Performances
5. Conclusions
- ●
- The improved hose net gradually floated up in a shape configuration with a large angle of inclination, which means the configuration curve was feasible for cornering and harvesting the fish.
- ●
- The addtition of the auxiliary hose in the hose net reduced the floating time required to close the box net, and it definitely floated up from the air input side. By injecting air in stages, it was possible to control the shape when driving the fish.
- ●
- When the hose net was set in the box net, lead ropes were necessary to maintain the horizontal position.
- ●
- In the semi-field experiment, it was confirmed that the hose net floated in the box net in the same shape as in the water tank experiment even under national conditions of waves and flows.
- ●
- In the live fish test, there were no fish left behind on the floating hose net or escaping through the gap between the hose net and the box net, indicating that it was possible to drive fish to the capture net.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- He, P.G.; Chopin, F.; Suuronen, P.; Ferro, R.S.T.; Lansley, J. Classification and Illustrated Definition of Fishing Gears; FAO Fisheries and Aquaculture Technical Paper No. 672; FAO: Rome, Italy, 2021. [Google Scholar]
- He, P.G.; Inoue, Y. Large-scale fish traps: Gear design, fish behavior, and conservation challenges. In Behavior of Marine Fishes: Capture Processes and Conservation Challenges; He, P., Ed.; Wiley-Blackwell: Ames, IA, USA, 2010; pp. 159–181. [Google Scholar]
- Ministry of Agriculture, Forestry and Fisheries of Japan. Available online: https://www.maff.go.jp/j/tokei/census/gyocen_illust2.html (accessed on 30 October 2023).
- Li, Q.; Li, Y.; Dong, S.C.; Mizukami, Y.; Han, J.L.; Yoshida, T.; Kitazawa, D. Performance and Feasibility Study of a Novel Automated Catch-Hauling Device Using a Flexible Hose Net Structure in Set-Net. J. Mar. Sci. Eng. 2021, 9, 1015. [Google Scholar] [CrossRef]
- Takayama, I. Set-net Floating experiment. Sci. Rep. Fish. Res. Inst. 1931, 2, 1–16. [Google Scholar]
- Miyamoto, S. Mechanical Net hauling of Set-net. Bull. Jpn. Soc. Sci. Fish. 1971, 37, 233–236. Available online: https://www.jstage.jst.go.jp/article/suisan1932/37/3/37_3_233/_pdf (accessed on 19 December 2023). (Translated from Japanese). [CrossRef]
- Fukahori, K.; Kasutani, M.; Nishenokubi, H. On the Development of an Automatic Setnet. Bull. Fac. Fish. Nagasaki Univ. 1988, 64, 45–51. [Google Scholar]
- Zhang, J.B.; Dohi, M.; Yoshida, T.; Kitazawa, D. Investigating the utilization of polyethylene pipe for automated hauling system in set net fishery. Ocean Eng. 2021, 233, 109192. [Google Scholar] [CrossRef]
- Li, Y.; Li, Q.; Mizukami, Y.; Yoshida, T.; Kitazawa, D. Study on the performance of the flexible hose net used in automated net-hauling system. Conf. Proc. Jpn. Soc. Nav. Archit. Ocean. Eng. 2019, 29, 549–553. [Google Scholar] [CrossRef]
- Fisheries Agency: The 1st Technology Workshop of Set Net Fishery. Available online: https://www.jfa.maff.go.jp/j/study/kenkyusidoka/teichi.html (accessed on 12 May 2021).
- Suuronen, P.; Siira, A.; Kauppinen, T.; Riikonen, R.; Lehtonen, E.; Harjunpää, H. Reduction of seal-induced catch and gear damage by modification of trap-net design: Design principles for a seal-safe trap-net. Fish. Res. 2006, 79, 129–138. [Google Scholar] [CrossRef]
- Hemmingsson, M.; Fjälling, A.; Lunneryd, S.G. The pontoon trap: Description and function of a seal-safe trap-net. Fish. Res. 2008, 93, 357–359. [Google Scholar] [CrossRef]
- Hosokawa, T. Contributing to sustainable fishing: Visualization of fixed nets using fish finders. Aqua Cult. Bus. 2020, 57, 47–50. [Google Scholar]
- Wada, M. Smart Fisheries; Midori Shobo: Tokyo, Japan, 2022; pp. 126–127. ISBN 978-4-89531-781-8. [Google Scholar]
- Chiu, C.-C.; Liao, T.-L.; Chen, C.-H.; Li, H. An Innovative Designed Velocimeter Application for Set Net Fishery. J. Mar. Sci. Eng. 2023, 11, 1740. [Google Scholar] [CrossRef]
- Kokaki, Y.; Tawara, N.; Kobayashi, T.; Hashimoto, K.; Ogawa, T. Sequential Fish Catch Forecasting Using Bayesian State Space Models. In Proceedings of the 2018 24th International Conference on Pattern Recognition (ICPR), Beijing, China, 20–24 August 2018. [Google Scholar] [CrossRef]
- Frid, O.; Belmaker, J. Catch dynamics of set net fisheries in Israel. Fish. Res. 2019, 213, 1–11. [Google Scholar] [CrossRef]
- Kang, M.; Liu, J.; Hassan, R.B.B.R.; Fajaryanti, R.; Hwang, B. A preparatory study on fish behavioral properties in a set-net. J. Korean Soc. Fish. Ocean Technol. 2020, 56, 105–113. [Google Scholar] [CrossRef]
- Hirama, Y.; Yokoyama, S.; Yamashita, T.; Kawamura, H.; Suzuki, K.; Wada, M. Verification of Fish Species Estimation Model Based on Echo Sounder Image. In Proceedings of the 32nd Annual Conference of the Japanese Society for Artificial Intelligence, Kagoshima, Japan, 5–8 June 2018. [Google Scholar]
- Saville, R.; Hatanaka, K.; Wada, M. ICT application of real-time monitoring and estimation system for set-net fishery. In Proceedings of the OCEANS 2015-MTS/IEEE Washington, Washington, DC, USA, 19–22 October 2015. [Google Scholar] [CrossRef]
- Shiozawa, M.; Shiode, D.; Okuyama, J.; Hu, F.; Tokai, T. Behavioural characteristics of loggerhead turtles (Caretta caretta) in a submerged bag net of a setnet observed in a bycatch simulation and the development of a turtle releasing device. Aquat. Conserv. Mar. Freshw. Ecosyst. 2019, 29, 2107–2115. [Google Scholar] [CrossRef]
- Wan, R.; Guan, Q.L.; Li, Z.G.; Hu, F.X.; Dong, S.C.; You, X.X. Study on hydrodynamic performance of a set-net in current based on numerical simulation and physical model test. Ocean Eng. 2020, 195, 106660. [Google Scholar] [CrossRef]
- Takahashi, Y.; Komeyama, K. Simulation of the capture process in set net fishing using a fish-schooling behavior model. Fish Sci. 2020, 86, 971–983. [Google Scholar] [CrossRef]
- Takagi, T.; Moritomi, Y.; Iwata, J.; Nakamine, H.; Sannomiya, N. Mathematical model of fish schooling behaviour in a set-net. ICES J. Mar. Sci. 2004, 61, 1214–1223. [Google Scholar] [CrossRef]
- Uchida, K.; Ogawa, H.; Hasegawa, K.; Miyamoto, Y.; Noro, H.; Wada, Y.; Akiyama, S. Monitoring the behavior of young bluefin tuna Thunnus orientalis and yellowtail Seriola quinqueradiata in set nets using ultrasonic biotelemetry. Nippon Suisan Gakkaishi 2018, 84, 14–22. [Google Scholar] [CrossRef]
- Pimm, A.; Garvey, S.; Jong, M. Design and testing of energy bags for underwater compressed air energy storage. Energy 2014, 66, 496–508. [Google Scholar] [CrossRef]
- Chang, C.T.; Huang, P.T. A water balloon as an innovative energy storage medium. Polymers 2022, 14, 3396. [Google Scholar] [CrossRef] [PubMed]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Items | 1/10 Model | Actual Net | ||
|---|---|---|---|---|
| Hose Net | Auxiliary Hose | |||
| Length (m) | 6.0 | 2.08 (In the front) | 3.58 (In the rear side) | 60.000 |
| Width (m) | 3.6 | --- | 36.000 | |
| Diameter of the hose (mm) | 25 | 100 | 150 | |
| Volume (L) | 29 | 16 | 28 | 9500 |
| Maximum buoyancy (N) | 286.36 | 161.31 | 277.64 | 116,548.70 |
| Weight of the hose net (N) | 255.47 | 143.91 | 247.69 | --- |
| Material density of hose (kg/m3) (Polyester and polyethylene) | 1340 | 1340 | 1340 | 1340 |
| Material density of cover net (kg/m3) (Polyester) | 1380 | 1380 | 1380 | 1380 |
| Weight of the hose net (N) Maximum buoyancy (N) | 0.89 | 0.89 | 0.89 | --- |
| Items | Box Net | Actual Net |
|---|---|---|
| Length (m) | 6.0 | 60 |
| Width (m) | 3.6 | 36 |
| Depth(m) | 3.0 | 30 |
| Diameter of the float hose (mm) | 100 | -- |
| Volume of floating hose(L) | 213 | -- |
| Mesh size of the net (mm) | 90 | 90 |
| Diameter of the net twine diameter (mm) | 4 | 4 |
| Material density of hose (kg/m3) (Polyester and polyethylene) | 1340 | 1340 |
| Species | Yellowtail | Red Gurnard | Chub Mackerel |
|---|---|---|---|
| Body Length (cm) | 30.0~32.0 | 27.0~28.0 | 30.8~42.2 |
| Body Width (cm) | --- | 5.0~5.5 | 4.0~4.8 |
| Body height (cm) | --- | 4.8~5.0 | 5.5~7.0 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Q.; Dong, S.; Furuichi, D.; Mizukami, Y.; Kitazawa, D. Water-Tank and Semi-Field Experimental Investigation of a Hose Net Fish-Hauling Device for Next-Generation Set-Net Fishing. J. Mar. Sci. Eng. 2024, 12, 44. https://doi.org/10.3390/jmse12010044
Li Q, Dong S, Furuichi D, Mizukami Y, Kitazawa D. Water-Tank and Semi-Field Experimental Investigation of a Hose Net Fish-Hauling Device for Next-Generation Set-Net Fishing. Journal of Marine Science and Engineering. 2024; 12(1):44. https://doi.org/10.3390/jmse12010044
Chicago/Turabian StyleLi, Qiao, Shuchuang Dong, Daigo Furuichi, Yoichi Mizukami, and Daisuke Kitazawa. 2024. "Water-Tank and Semi-Field Experimental Investigation of a Hose Net Fish-Hauling Device for Next-Generation Set-Net Fishing" Journal of Marine Science and Engineering 12, no. 1: 44. https://doi.org/10.3390/jmse12010044
APA StyleLi, Q., Dong, S., Furuichi, D., Mizukami, Y., & Kitazawa, D. (2024). Water-Tank and Semi-Field Experimental Investigation of a Hose Net Fish-Hauling Device for Next-Generation Set-Net Fishing. Journal of Marine Science and Engineering, 12(1), 44. https://doi.org/10.3390/jmse12010044