
Analytical Solution of Time-Optimal Trajectory for Heaving Dynamics of Hybrid Underwater Gliders

 ,
, 

Abstract
:1. Introduction
2. Heave Dynamics of Hybrid Underwater Glider and TOT Definition
2.1. Assumptions
- The HUG is assumed to have neutral buoyancy, with its body-fixed coordinate system centered at its mass center;
- The HUG is deeply submerged in a homogeneous, unbounded fluid, far removed from the free surface and devoid of surface effects;
- The HUG exhibits three planes of symmetry;
- To simplify the problem, only the depth motion of the HUG is considered in this paper;
- The hydrodynamic coefficients of the HUG remain constant and do not vary.
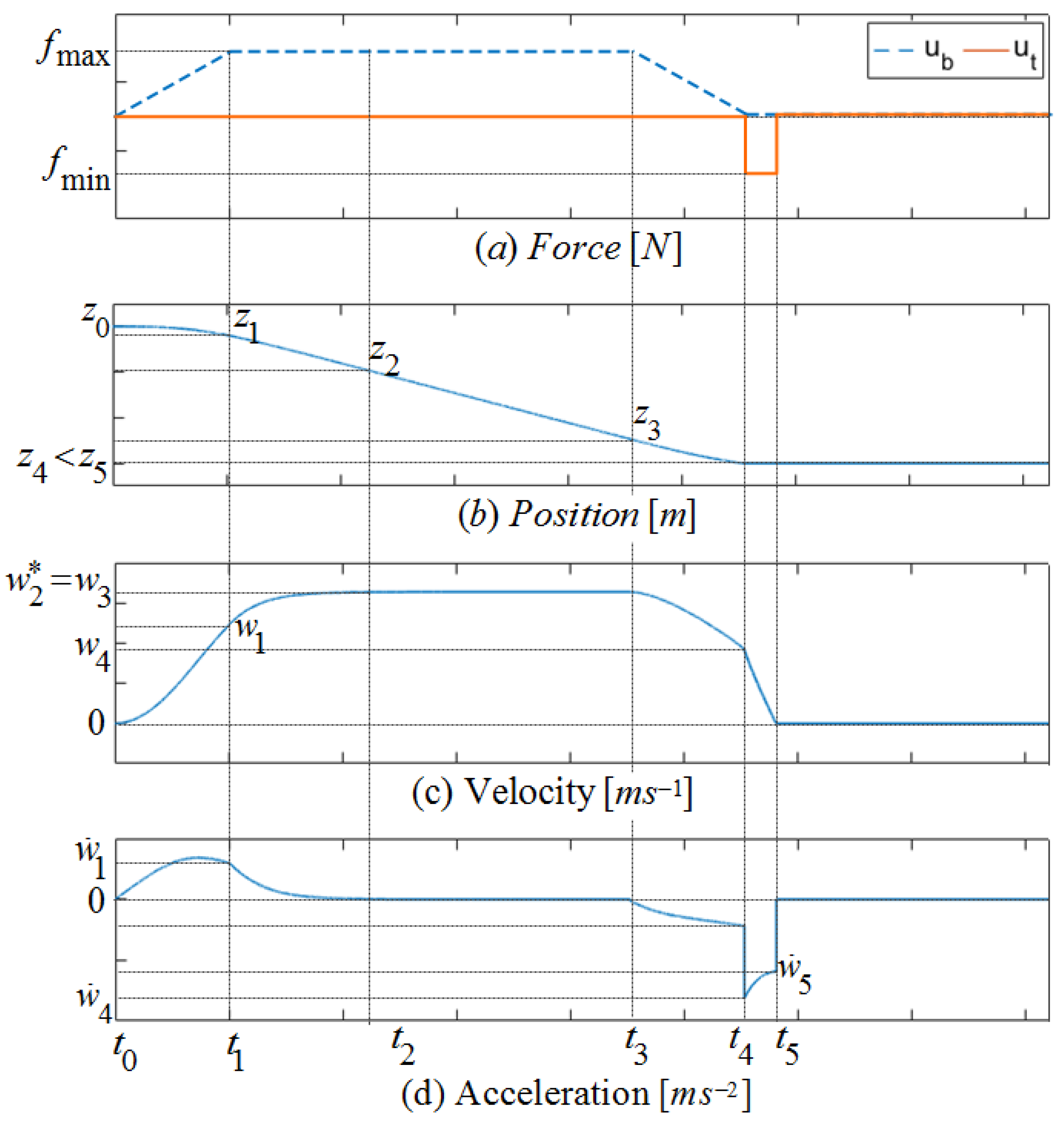
2.2. Heave Motion of HUG and TOT Definition
3. Analytical Solution of TOT in Heave Dynamics of HUG Using Buoyancy and Thruster Force Individually
3.1. TOT in the 1st Segment with Positive Force Rate from Buoyancy Engine
3.2. TOT in the 2nd Segment with Maximum Force from Buoyancy Engine
3.3. TOT in the 3rd Segment with Constant Velocity
3.4. TOT in the 4th Segment with Negative Force Rate from Buoyancy Engine
3.5. TOT in the 5th Segment with Minimum Input from the Thruster
4. Closed-Form Solution for TOT in Heave Dynamics of HUG
4.1. Find , and
4.2. Find , , , and
4.3. Find , and
4.4. Find , , and
4.5. Find and
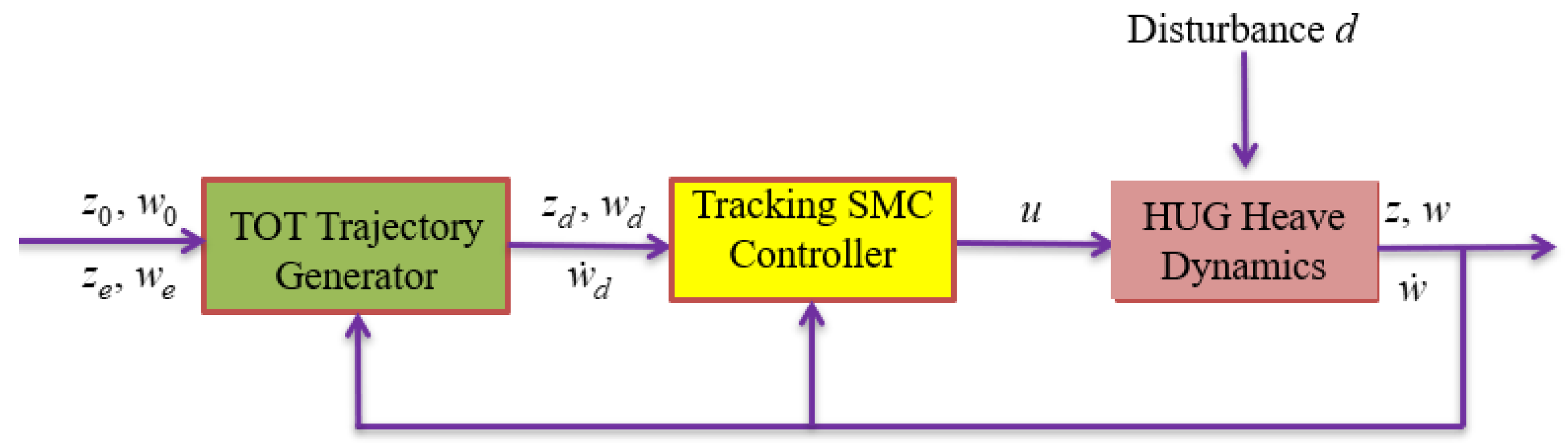
5. Design the Tracking Controller Using the SMC Algorithm
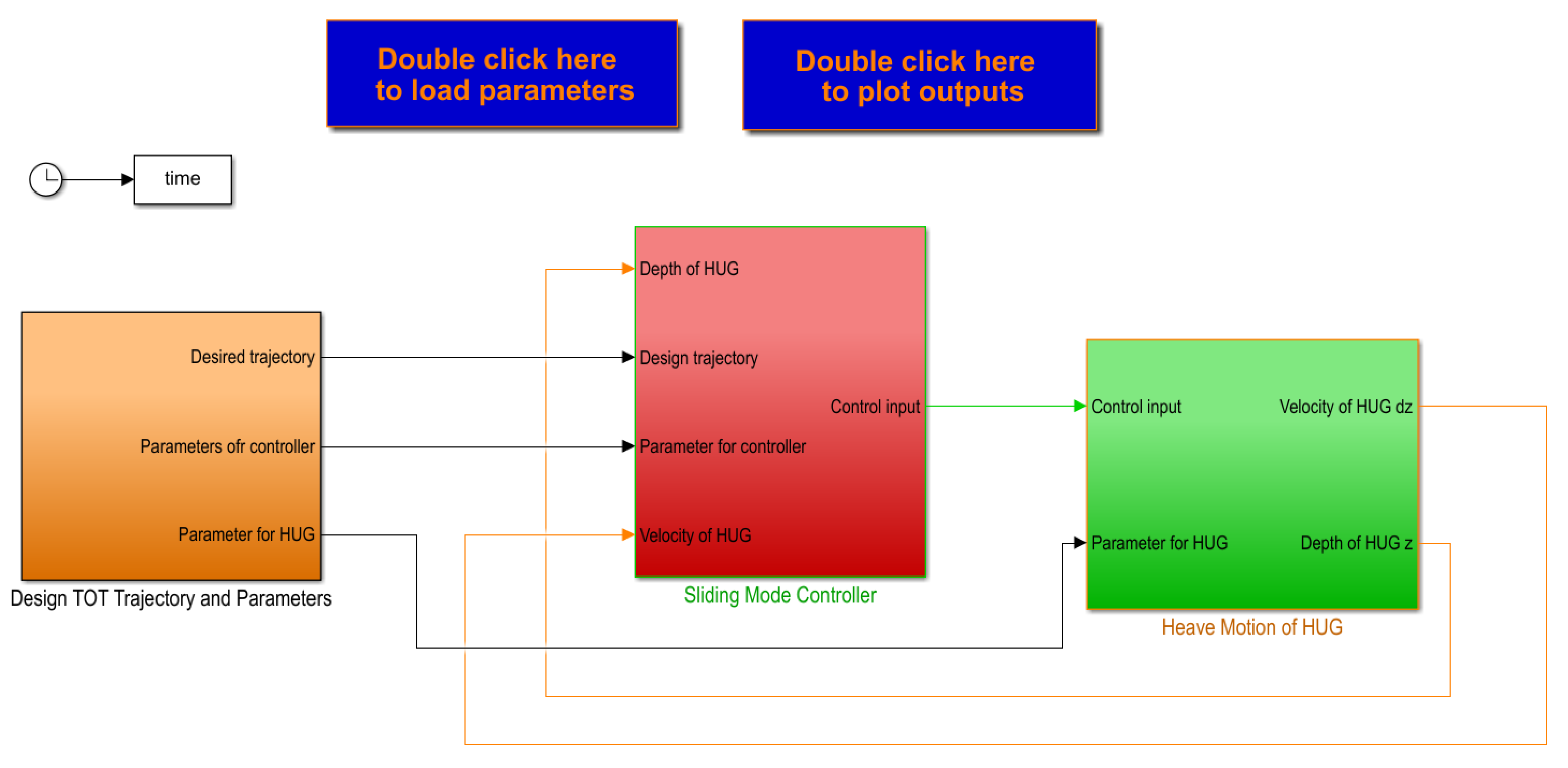
6. Simulation and Discussion
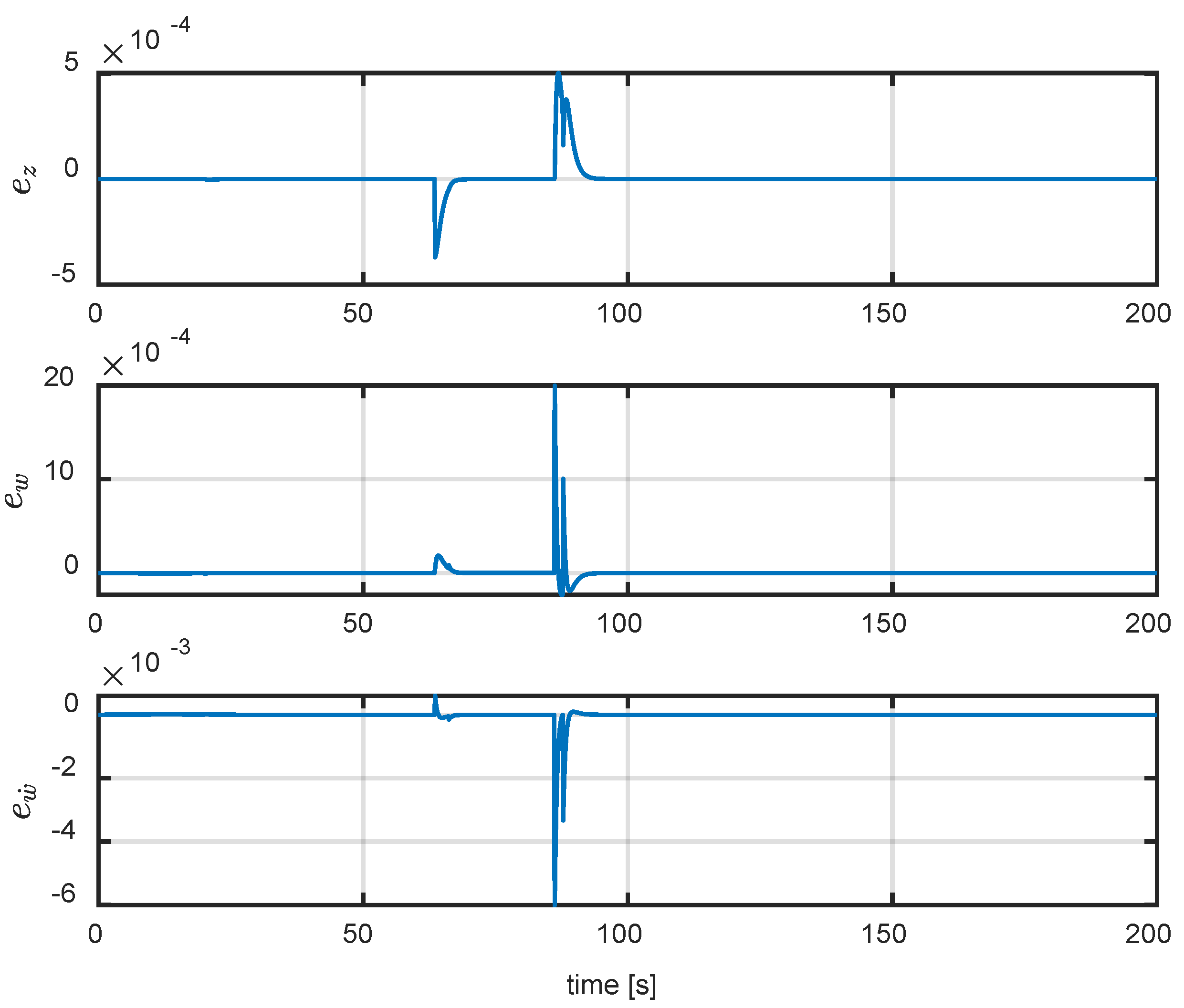
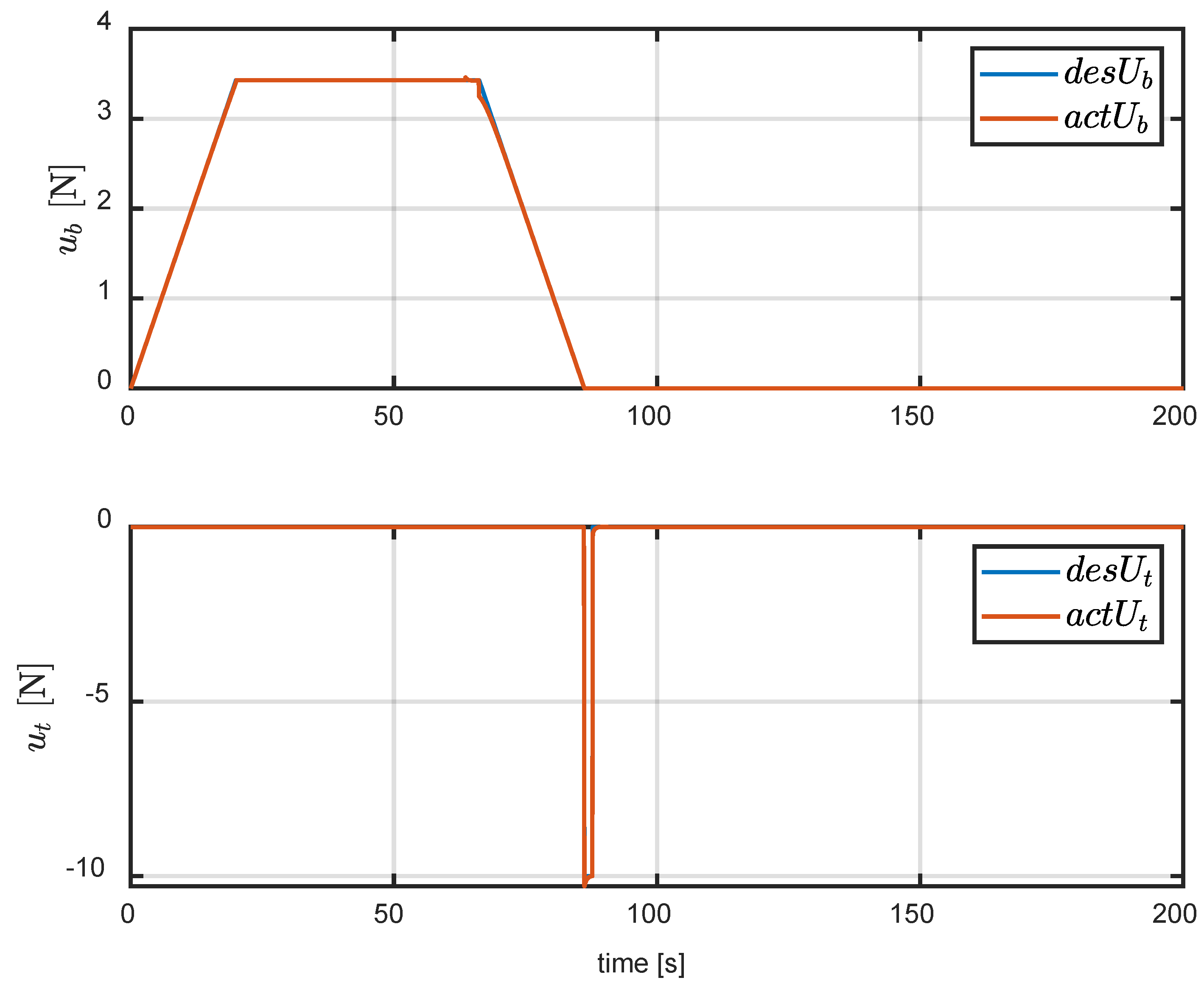
6.1. Simulation 1: Tracking Control of TOT Using SMC Controller without Disturbance
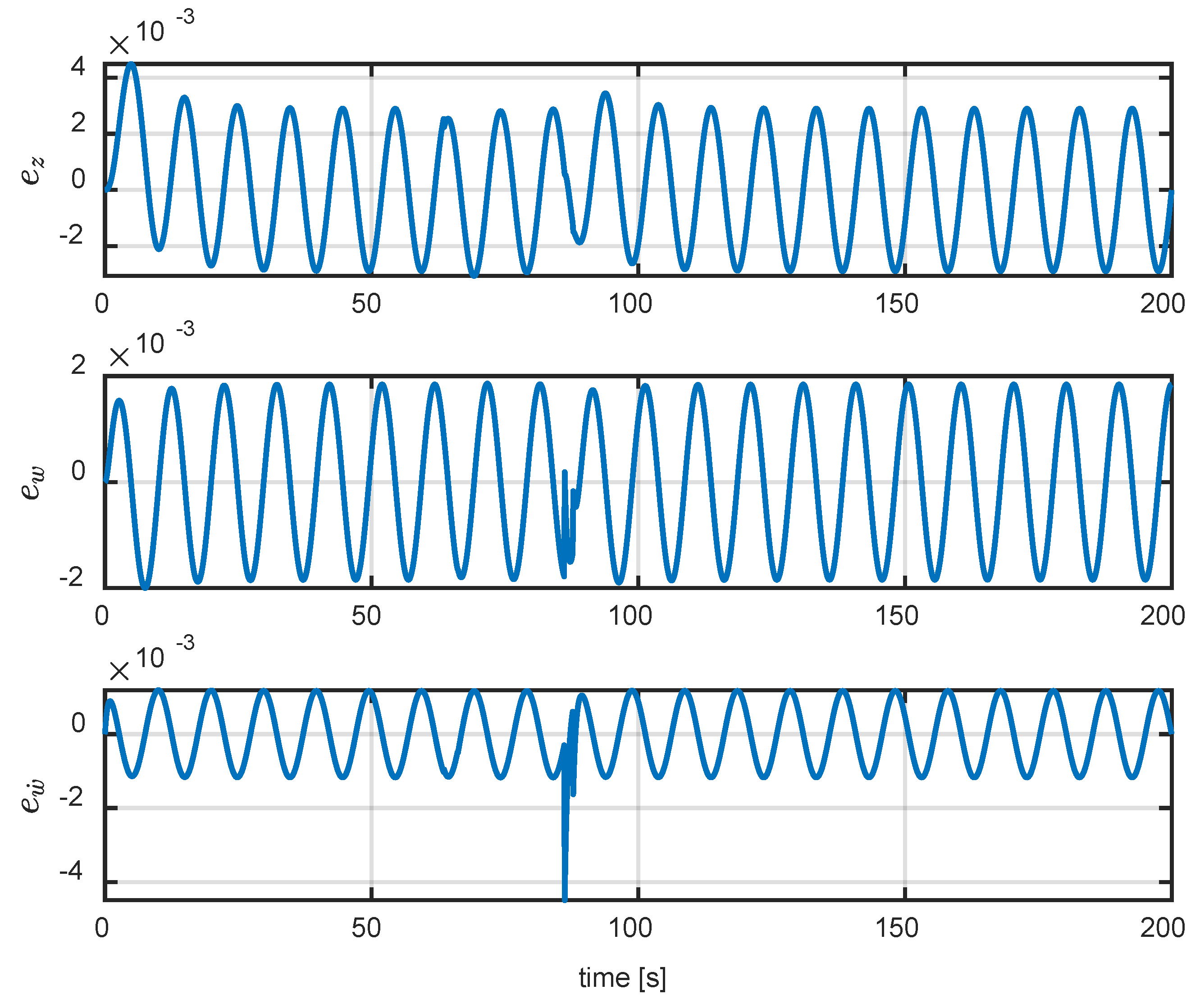
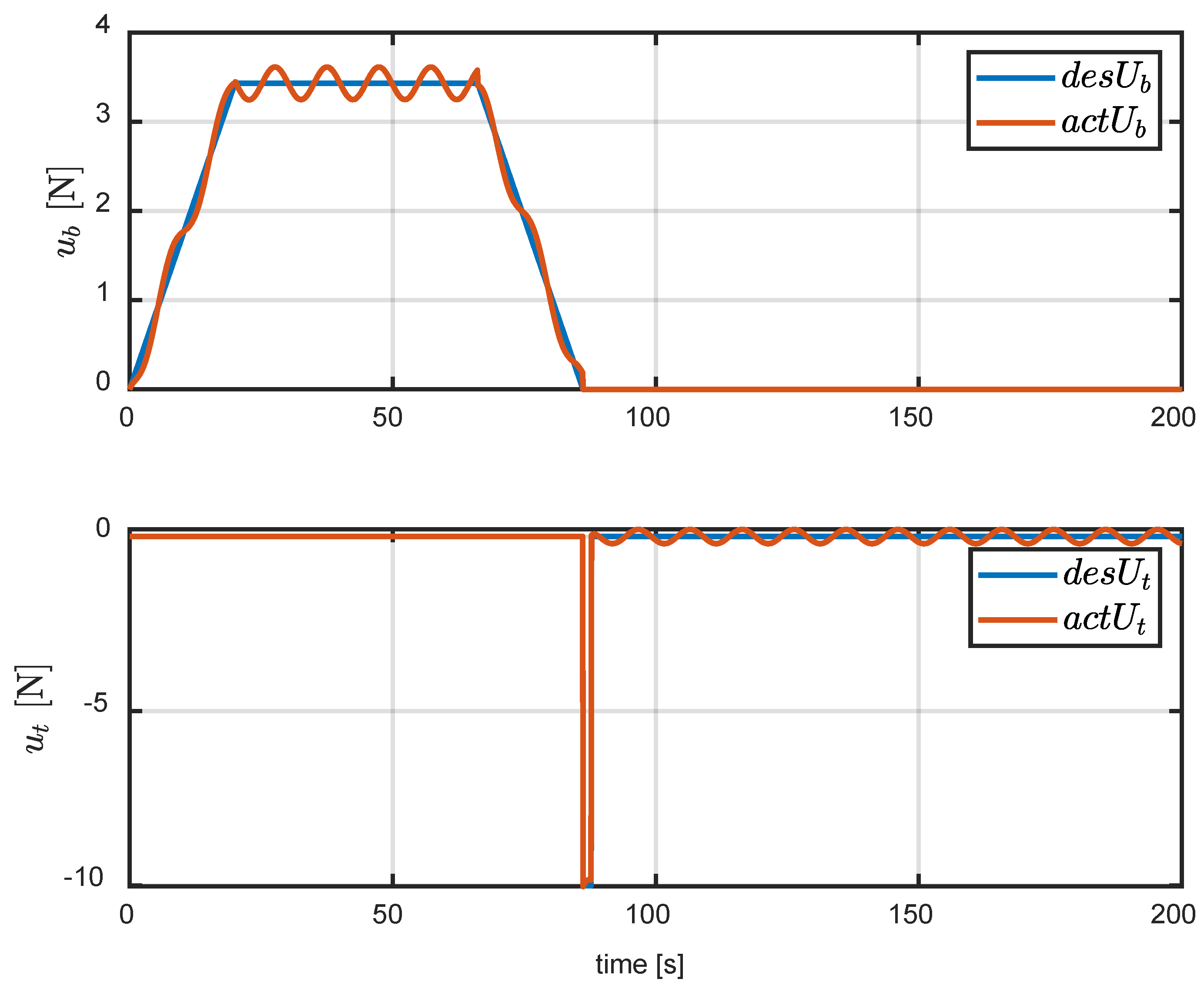
6.2. Simulation 2: Tracking Control of TOT Using SMC Controller under External Disturbance
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Cui, R.; Zhang, X.; Cui, D. Adaptive sliding-mode attitude control for autonomous underwater vehicles with input nonlinearities. Ocean Eng. 2016, 123, 45–54. [Google Scholar] [CrossRef]
- Vasilijevic, A.; Bremnes, J.E.; Ludvigsen, M. Remote Operation of Marine Robotic Systems and Next-Generation Multi-Purpose Control Rooms. J. Mar. Sci. Eng. 2023, 11, 1942. [Google Scholar] [CrossRef]
- Lu, C.; Yang, J.; Leira, B.J.; Chen, Q.; Wang, S. Three-Dimensional Path Planning of Deep-Sea Mining Vehicle Based on Improved Particle Swarm Optimization. J. Mar. Sci. Eng. 2023, 11, 1797. [Google Scholar] [CrossRef]
- Von Benzon, M.; Sørensen, F.F.; Uth, E.; Jouffroy, J.; Liniger, J.; Pedersen, S. An Open-Source Benchmark Simulator: Control of a BlueROV2 Underwater Robot. J. Mar. Sci. Eng. 2022, 10, 1898. [Google Scholar] [CrossRef]
- Vu, M.T.; Thanh, H.L.N.N.; Huynh, T.T.; Do, Q.T.; Do, T.D.; Hoang, Q.D.; Le, T.H. Station-Keeping Control of a Hovering Over-Actuated Autonomous Underwater Vehicle Under Ocean Current Effects and Model Uncertainties in Horizontal Plane. IEEE Access 2021, 9, 6855–6867. [Google Scholar] [CrossRef]
- Tang, S.; Xue, N.; Lui, K.; Wang, D.; Ye, J.; Fan, T. Motion control for an open-frame work-class ROV in current using an adaptive super-twisting disturbance observer. Ocean Eng. 2023, 280, 114723. [Google Scholar] [CrossRef]
- Vu, M.T.; Choi, H.S.; Thieu, Q.M.N.; Nguyen, N.D.; Lee, S.D.; Le, T.H.; Sur, J. Docking assessment algorithm for autonomous underwater vehicles. Appl. Ocean Res. 2020, 100, 102180. [Google Scholar] [CrossRef]
- Lv, T.; Wang, Y.; Liu, X.; Zhang, M. Command-Filter-Based Region-Tracking Control for Autonomous Underwater Vehicles with Measurement Noise. J. Mar. Sci. Eng. 2023, 11, 2119. [Google Scholar] [CrossRef]
- Zhang, J.; Ning, X.; Ma, S. An improved particle swarm optimization based on age factor for multi-AUV cooperative planning. Ocean Eng. 2023, 287, 115753. [Google Scholar] [CrossRef]
- Deutsch, C.; Kuttenkeuler, J.; Melin, T. Glider performance analysis and intermediate-fidelity modelling of underwater vehicles. Ocean Eng. 2020, 210, 107567. [Google Scholar] [CrossRef]
- Du, X.; Liu, X.; Song, Y. Analysis of the Steady-Stream Active Flow Control for the Blended-Winged-Body Underwater Glider. J. Mar. Sci. Eng. 2023, 11, 1344. [Google Scholar] [CrossRef]
- Wu, Q.; Wu, H.; Jiang, Z.; Tan, L.; Yang, Y.; Yan, S. Multi-objective optimization and driving mechanism design for controllable wings of underwater gliders. Ocean Eng. 2023, 286, 115534. [Google Scholar] [CrossRef]
- Shen, X.R.; Wang, Y.H.; Yang, S.Q.; Liang, Y.; Li, H. Development of underwater gliders: An overview and prospect. J. Unmanned Undersea Syst. 2018, 26, 89–106. [Google Scholar]
- Yang, M.; Wang, Y.; Chen, Y.; Wang, C.; Liang, Y.; Yang, S. Data-driven optimization design of a novel pressure hull for AUV. Ocean Eng. 2022, 257, 111562. [Google Scholar] [CrossRef]
- Yang, Y.; Liu, Y.; Wang, Y.; Zhang, H.; Zhang, L. Dynamic modeling and motion control strategy for deep-sea hybrid-driven underwater gliders considering hull deformation and seawater density variation. Ocean Eng. 2017, 143, 66–78. [Google Scholar] [CrossRef]
- Webb, D.C.; Simonetti, P.J.; Jones, C.P. SLOCUM: An underwater glider propelled by environment energy. IEEE J. Ocean. Eng. 2001, 26, 447–452. [Google Scholar] [CrossRef]
- Wang, Y.; Bulger, C.; Thanyamanta, W.; Bose, N. A Backseat Control Architecture for a Slocum Glider. J. Mar. Sci. Eng. 2021, 9, 532. [Google Scholar] [CrossRef]
- Sherman, J.; Davis, R.E.; Owens, W.B.; Valdes, J. The autonomous underwater glider “Spray”. IEEE J. Ocean. Eng. 2001, 26, 437–446. [Google Scholar] [CrossRef]
- Eriksen, C.C.; Osse, T.J.; Light, R.D.; Wen, T.; Lehman, T.W.; Sabin, P.L.; Ballard, J.W.; Chiodi, A.M. Sea glider: A long range autonomous underwater vehicle for oceanographic research. IEEE J. Ocean. Eng. 2001, 26, 424–436. [Google Scholar] [CrossRef]
- Anderlini, E.; Harris, C.; Phillips, A.B.; Lopez, A.L.; Woo, M.; Thomas, G. Towards autonomy: A recommender system for the determination of trim and flight parameters for Seagliders. Ocean Eng. 2019, 189, 106338. [Google Scholar] [CrossRef]
- Osse, T.J.; Eriksen, C.C. The deep glider: A full ocean depth glider for oceanographic research. In Proceedings of the Oceans’07, Vancouver, BC, Canada, 29 September–4 October 2007; pp. 1–12. [Google Scholar]
- Wang, P.; Wang, X.; Wang, Y.; Niu, W.; Yang, S.; Sun, C.; Luo, C. Dynamics Modeling and Analysis of an Underwater Glider with Dual-Eccentric Attitude Regulating Mechanism Using Dual Quaternions. J. Mar. Sci. Eng. 2023, 11, 5. [Google Scholar] [CrossRef]
- Jenkins, S.A.; Humphreys, D.E.; Sherman, J.; Osse, J.; Jones, C.; Leonard, N.; Graver, J.; Bachmayer, R.; Clem, T.; Carroll, P.; et al. Underwater Glider System Study (Technical Report 53); Scripps Institution of Oceanography: San Diego, CA, USA, 2003. [Google Scholar]
- Tian, X.; Zhang, L.; Zhang, H. Research on Sailing Efficiency of Hybrid-Driven Underwater Glider at Zero Angle of Attack. J. Mar. Sci. Eng. 2022, 10, 21. [Google Scholar] [CrossRef]
- Wu, X.; Yu, P.; Zhang, C.; Wang, Q.; Zhu, Z.; Wang, T. Shape optimization of underwater glider for maximum gliding range with uncertainty factors considered. Ocean Eng. 2023, 287, 115869. [Google Scholar] [CrossRef]
- Chyba, M.; Leonard, N.E.; Sontag, E.D. Time-Optimal Control for Underwater Vehicles. IFAC Proc. Vol. 2000, 33, 117–122. [Google Scholar] [CrossRef]
- Chyba, M.; Haberkorn, T.; Smith, R.N.; Choi, S.K. Design and implementation of time efficient trajectories for autonomous underwater vehicles. Ocean Eng. 2008, 35, 63–76. [Google Scholar] [CrossRef]
- Rhoads, B.; Mezić, I.; Poje, A.C. Minimum time heading control of underpowered vehicles in time-varying ocean currents. Ocean Eng. 2013, 66, 12–31. [Google Scholar] [CrossRef]
- Vu, M.T.; Choi, H.S.; Kang, J.I.; Ji, D.H.; Joong, H. Energy efficient trajectory design for the underwater vehicle with bounded inputs using the global optimal sliding mode control. J. Mar. Sci. Technol. 2017, 25, 705–714. [Google Scholar]
- Nguyen, N.D.; Vu, M.T.; Nguyen, P.; Huang, J.; Jung, D.W.; Cho, H.; Phan, H.N.A.; Choi, H.-S. Time-Optimal Trajectory Design for Heading Motion of the Underwater Vehicle. J. Mar. Sci. Eng. 2023, 11, 1099. [Google Scholar] [CrossRef]
- Koubaa, Y.; Boukattaya, M.; Damak, T. Adaptive sliding mode control for nonholonomic mobile robot with uncertain kinematics and dynamics. Appl. Artif. Intell. 2018, 32, 924–938. [Google Scholar] [CrossRef]
- Vu, M.T.; Van, M.; Bui, D.H.P.; Do, Q.T.; Huynh, T.T.; Lee, S.D.; Choi, H.S. Study on Dynamic Behavior of Unmanned Surface Vehicle-Linked- Unmanned Underwater Vehicle System for Underwater Exploration. Sensors 2020, 20, 1329. [Google Scholar] [CrossRef]
- Vu, M.T.; Le, T.H.; Thanh, H.L.N.N.; Huynh, T.T.; Van, M.; Hoang, Q.D.; Do, Q.T. Robust Position Control of an Over-actuated Underwater Vehicle under Model Uncertainties and Ocean Current Effects Using Dynamic Sliding Mode Surface and Optimal Allocation Control. Sensors 2021, 21, 747. [Google Scholar] [CrossRef] [PubMed]
- Zhang, X.; Zhou, H.; Fu, J.; Wen, H.; Yao, B.; Lian, L. Adaptive integral terminal sliding mode based trajectory tracking control of underwater glider. Ocean Eng. 2023, 269, 113436. [Google Scholar] [CrossRef]
- Zhang, W.; Wu, W.; Li, Z.; Du, X.; Yan, Z. Three-Dimensional Trajectory Tracking of AUV Based on Nonsingular Terminal Sliding Mode and Active Disturbance Rejection Decoupling Control. J. Mar. Sci. Eng. 2023, 11, 959. [Google Scholar] [CrossRef]
- Sahu, B.K.; Subudhi, B. Adaptive tracking control of an autonomous underwater vehicle. Int. J. Autom. Comput. 2015, 11, 299–307. [Google Scholar] [CrossRef]
- Li, J.H.; Lee, P.M. Design of an adaptive nonlinear controller for depth control of an autonomous underwater vehicle. Ocean Eng. 2005, 32, 2165–2181. [Google Scholar] [CrossRef]
- Park, B.S.; Kwon, J.-W.; Kim, H. Neural network-based output feedback control for reference tracking of underactuated surface vessels. Automatica 2017, 77, 353–359. [Google Scholar] [CrossRef]
- Chiman, K.; Lewis, F.L. Robust backstepping control of nonlinear systems using neural networks. IEEE Trans. Syst. Man. Cybernetics 2000, 30, 753–766. [Google Scholar]
- Thanh, H.L.N.N.; Vu, M.T.; Mung, N.X.; Nguyen, N.P.; Phuong, N.T. Perturbation Observer-Based Robust Control Using a Multiple Sliding Surfaces for Nonlinear Systems with Influences of Matched and Unmatched Uncertainties. Mathematics 2020, 8, 1371. [Google Scholar] [CrossRef]
- Li, J.; Du, J.; Chang, W.-J. Robust time-varying formation control for underactuated autonomous underwater vehicles with disturbances under input saturation. Ocean Eng. 2019, 179, 180–188. [Google Scholar] [CrossRef]
- Liang, X.; Qu, X.; Wang, N.; Zhang, R.; Li, Y. Three-dimensional trajectory tracking of an underactuated AUV based on fuzzy dynamic surface control. IET. Intell. Transp. Syst. 2019, 14, 364–370. [Google Scholar] [CrossRef]
- Zhong, Y.; Yang, Y.; He, K.; Chen, C. Fast terminal sliding-mode control based on unknown input observer for the tracking control of underwater vehicles. Ocean Eng. 2022, 264, 112480. [Google Scholar] [CrossRef]
- Rojsiraphisal, T.; Mobayen, S.; Asad, J.H.; Vu, M.T.; Chang, A.; Puangmalai, J. Fast Terminal Sliding Control of Underactuated Robotic Systems Based on Disturbance Observer with Experimental Validation. Mathematics 2021, 9, 1935. [Google Scholar] [CrossRef]
- Claus, B.; Bachmayer, R.; Cooney, L. Analysis and development of a buoyancy-pitch based depth control algorithm for a hybrid underwater glider. In Proceedings of the 2012 IEEE/OES Autonomous Underwater Vehicles (AUV), Southampton, UK, 24–27 September 2012; pp. 1–6. [Google Scholar]
- Fossen, T.I. Guidance and Control of Ocean Vehicles; John Wiley & Sons: New York, NY, USA, 1994. [Google Scholar]
- Fossen, T.I. Handbook of Marine Craft Hydrodynamics and Motion Control; John Wiley & Sons: Hoboken, NJ, USA, 2011. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variables | Description |
|---|---|
| The maximum force applied to HUG | |
| The minimum force applied to HUG | |
| Initial depth of HUG | |
| Desired depth of HUG | |
| The velocity profile of HUG in the 1st segment | |
| The velocity profile of HUG in the 2nd segment | |
| The velocity profile of HUG in the 3rd segment | |
| The velocity profile of HUG in the 4th segment | |
| The velocity profile of HUG in the 5th segment | |
| The position profile of HUG in the 1st segment | |
| The position profile of HUG in the 2nd segment | |
| The position profile of HUG in the 3rd segment | |
| The position profile of HUG in the 4th segment | |
| The position profile of HUG in the 5th segment | |
| The acceleration profile of HUG in the 1st segment | |
| The acceleration profile of HUG in the 2nd segment | |
| The acceleration profile of HUG in the 3rd segment | |
| The acceleration profile of HUG in the 4th segment | |
| The acceleration profile of HUG in the 5th segment |
(N) | (m∙s−2) | (s−1) | (m∙s−1) | (kgm2) | (kgm2) | (kg) | (kg) | (kg) | (N) | (N) |
|---|---|---|---|---|---|---|---|---|---|---|
| 2 | 0.01 | 2 | 0.1 | 0.0356 | −0.0119 | 50.48 | 50.5 | 10 | 3.43 | −10 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Vu, M.T.; Kim, S.H.; Nguyen, V.P.; Xuan-Mung, N.; Huang, J.; Jung, D.-W.; Choi, H.-S. Analytical Solution of Time-Optimal Trajectory for Heaving Dynamics of Hybrid Underwater Gliders. J. Mar. Sci. Eng. 2023, 11, 2216. https://doi.org/10.3390/jmse11122216
Vu MT, Kim SH, Nguyen VP, Xuan-Mung N, Huang J, Jung D-W, Choi H-S. Analytical Solution of Time-Optimal Trajectory for Heaving Dynamics of Hybrid Underwater Gliders. Journal of Marine Science and Engineering. 2023; 11(12):2216. https://doi.org/10.3390/jmse11122216
Chicago/Turabian StyleVu, Mai The, Seong Han Kim, Van P. Nguyen, Nguyen Xuan-Mung, Jiafeng Huang, Dong-Wook Jung, and Hyeung-Sik Choi. 2023. "Analytical Solution of Time-Optimal Trajectory for Heaving Dynamics of Hybrid Underwater Gliders" Journal of Marine Science and Engineering 11, no. 12: 2216. https://doi.org/10.3390/jmse11122216
APA StyleVu, M. T., Kim, S. H., Nguyen, V. P., Xuan-Mung, N., Huang, J., Jung, D.-W., & Choi, H.-S. (2023). Analytical Solution of Time-Optimal Trajectory for Heaving Dynamics of Hybrid Underwater Gliders. Journal of Marine Science and Engineering, 11(12), 2216. https://doi.org/10.3390/jmse11122216