
Simulation of Sea Ice Fragmentation Based on an Improved Voronoi Diagram Algorithm in an Ice Zone Navigation Simulator

 ,
, 

Abstract
:1. Introduction
1.1. Background
1.2. Physics-Based Cracking Simulation
1.3. Geometry-Based Cracking Simulation
1.4. Scene Management Techniques
1.5. Contributions
- (1)
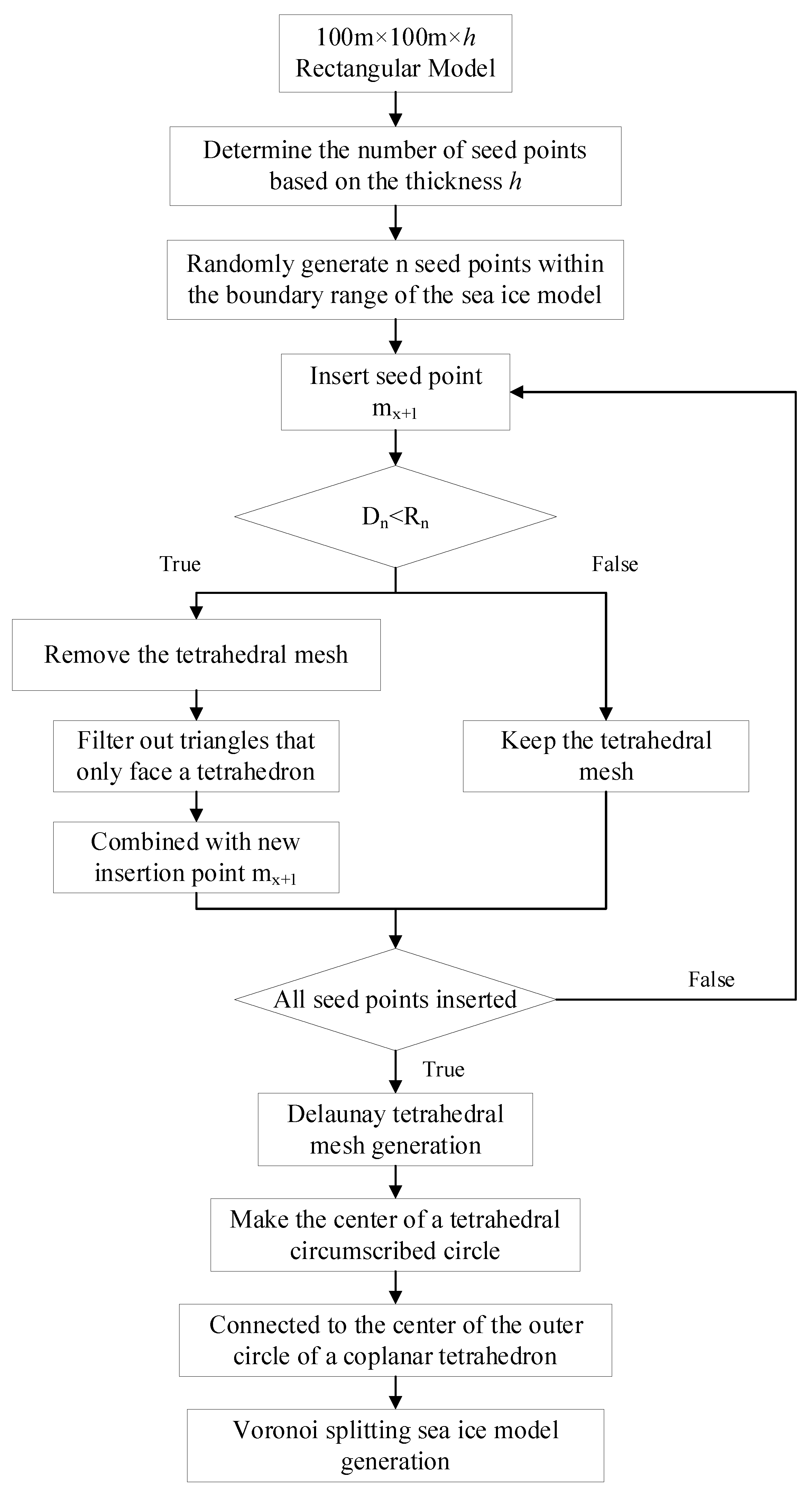
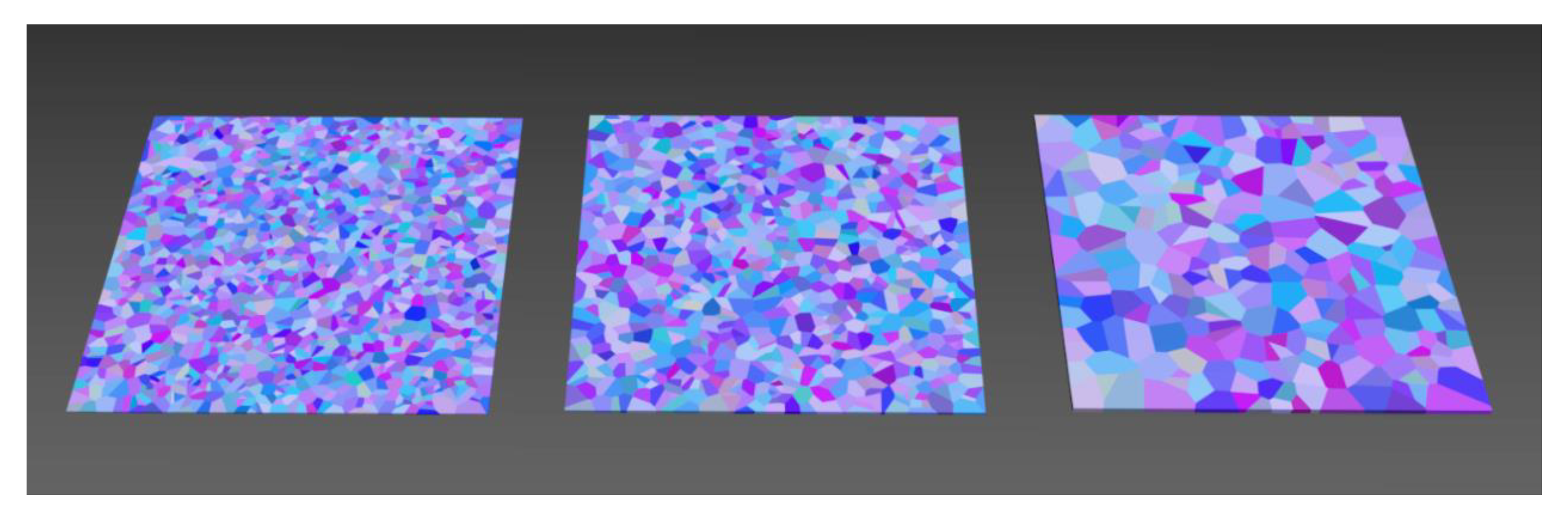
- The Voronoi algorithm to was used preprocess a sea ice model, and the Voronoi algorithm was improved during processing so that the number of seed points was correlated with the thickness of the sea ice to determine the effects of different thicknesses on the degree of fragmentation.
- (2)
- Not only was the ship–ice interaction process used to generate the channel outline, but the ship’s movement on the sea ice around the channel also generated force conduction. In this study, the effect of conduction cracking on the ice surface near the channel was achieved.
- (3)
- After the sea ice broke up, there was no interaction between ice floes and seawater, i.e., there is no floating effect due to ice floes. After sea ice breaks up, the ice floe should be subject to the buoyancy of seawater, and this study incorporated the floating of the ice floe on the water surface by using a method based on the model grid.
- (4)
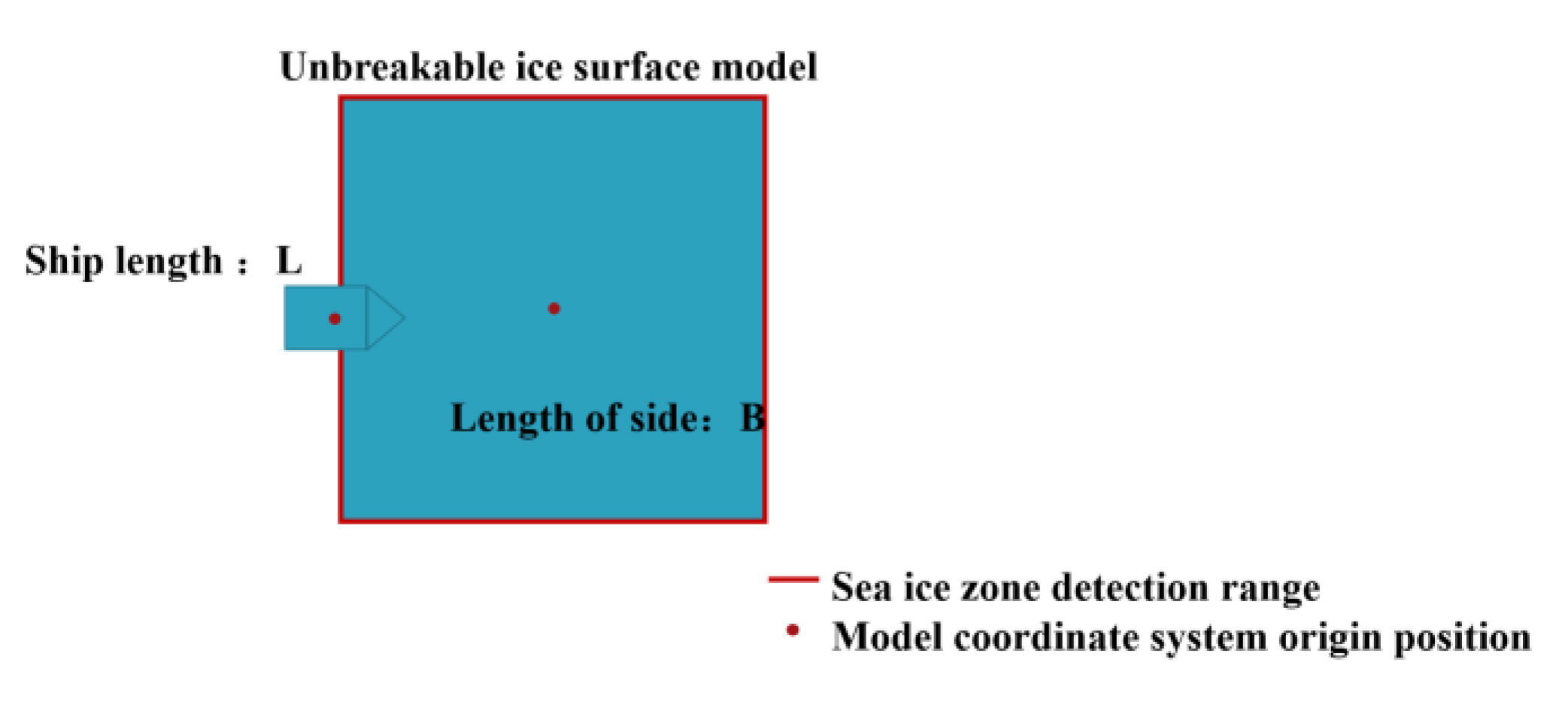
- In terms of ice zone scene management, this study improved upon the quadtree scene management technique, used a circular detection area instead of a square detection area, and associated the detection area with the ship’s motion characteristics, leaving a certain amount of buffer for conduction cracking of the ice.
2. Methods
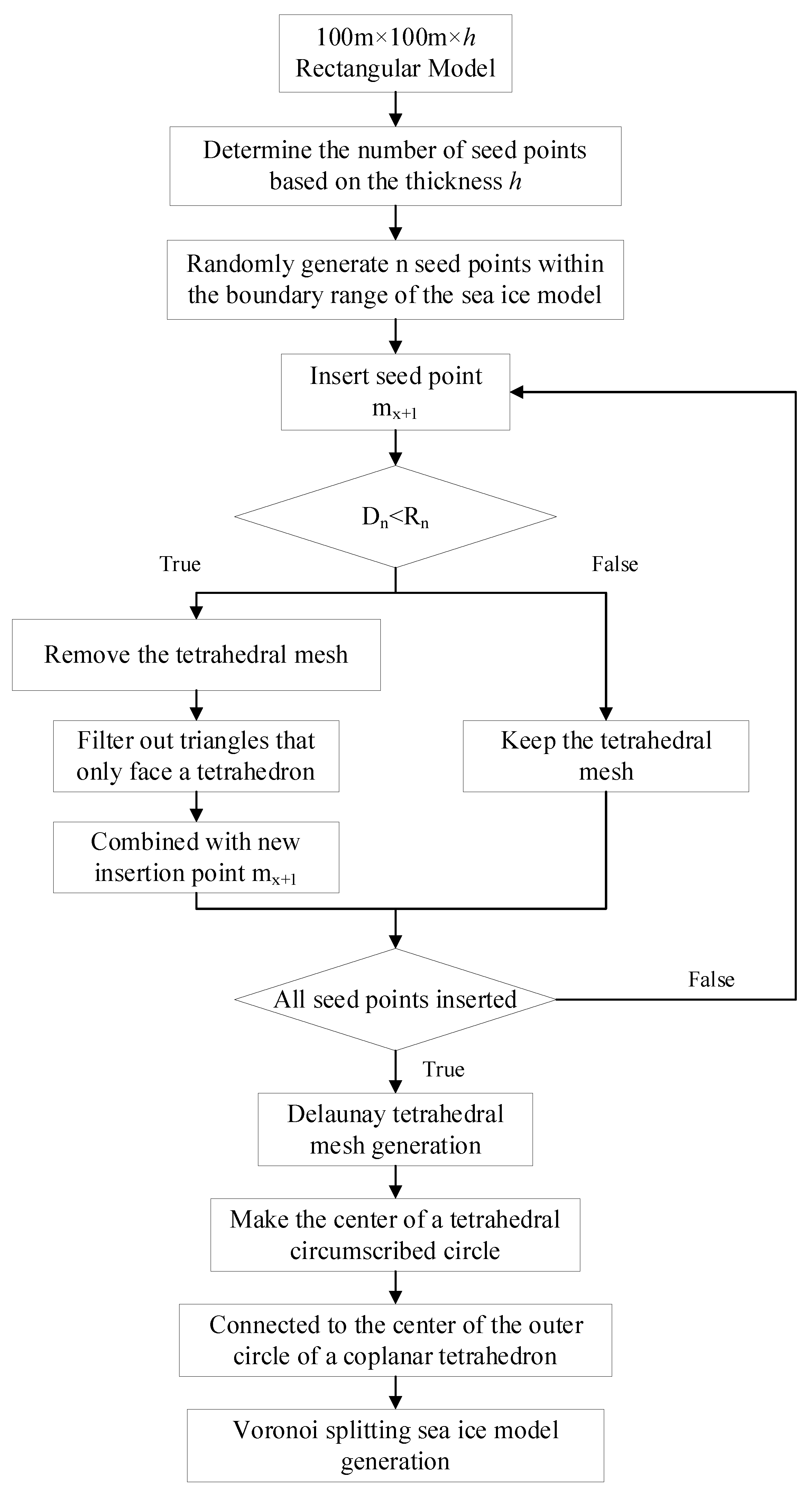
2.1. The Voronoi Diagram Algorithm for the Breaking up of Sea Ice Considering Ice Thickness
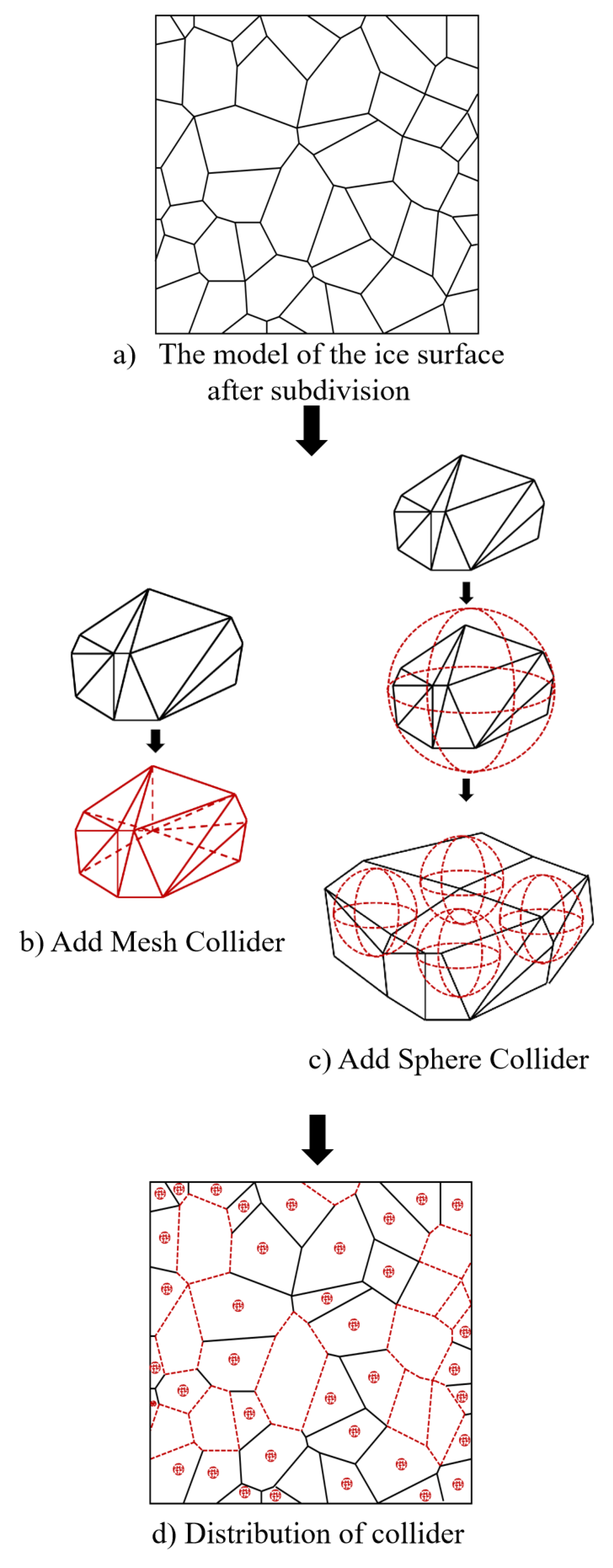
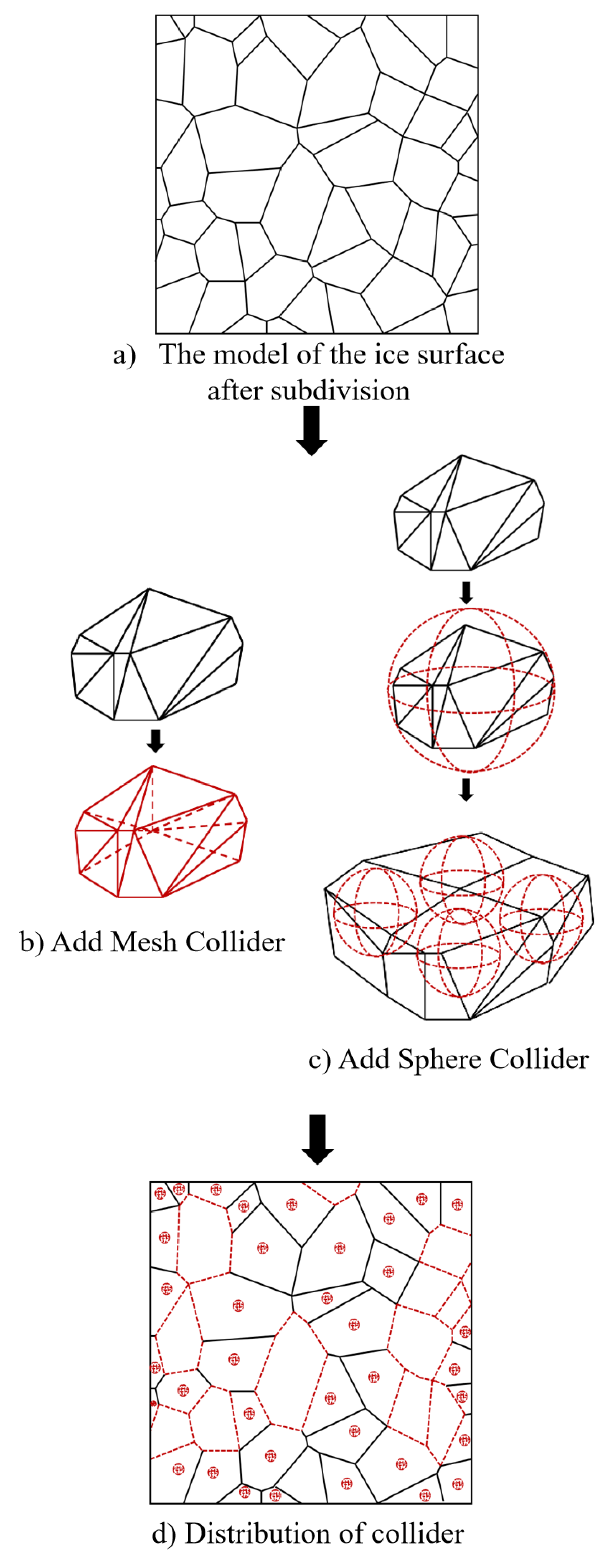
2.2. Collision Body Setup for Sea Ice Model Sub-Blocks
- (1)
- The Sphere Collider is added to a number of sub-blocks shown in Figure 5a, and the Mesh Collider is added to others.
- (2)
- There is a large redundancy with the sub-block geometry after adding the Sphere Collider enclosure, and there will be a large overlap between the collision bodies of the neighboring sub-blocks, so the radius of the Sphere Collider needs to be adjusted until there is no overlap between any of the Sphere Colliders, as shown in Figure 5c.
- (3)
- The distribution of collision bodies in the final ice model is shown in Figure 5d; the red dashed line indicates where the Mesh Collider was adopted to achieve a higher degree of fitting, while the Sphere Collider was adopted in other parts. This not only reproduces the effect cracking effect when a direct collision occurs, but this also optimizes the realism of conduction cracking.
- (4)
- The collision body information of the processed ice model sub-blocks is stored for calling when the large-area scene is laid out.
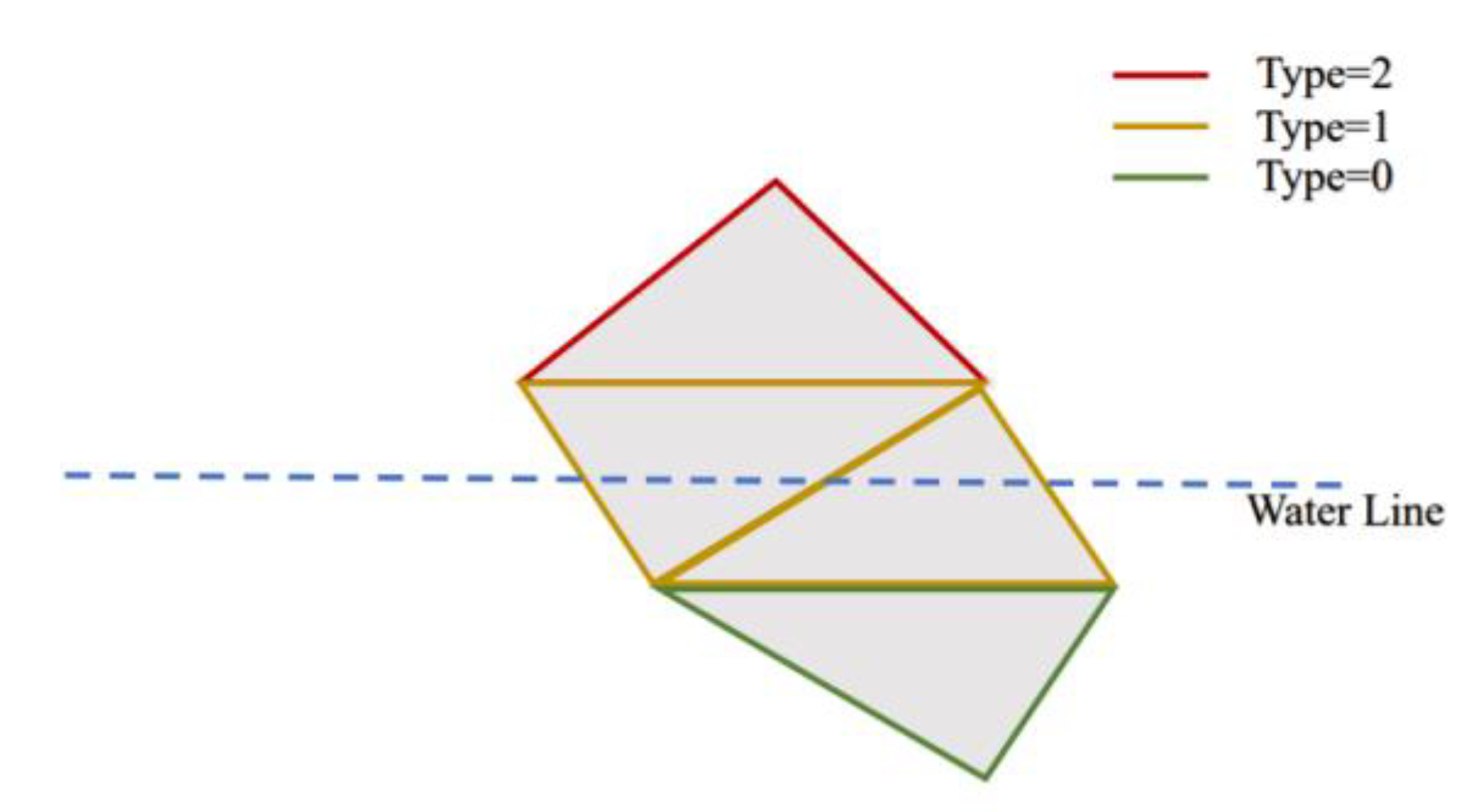
2.3. Simulation of the Floating State of the Ice Floes
- (1)
- Two vertices are under the water.
- (2)
- One vertex is under the water.
2.4. Scenario Management Based on the Improved Quadtree Algorithm
3. Experimental Results and Discussion
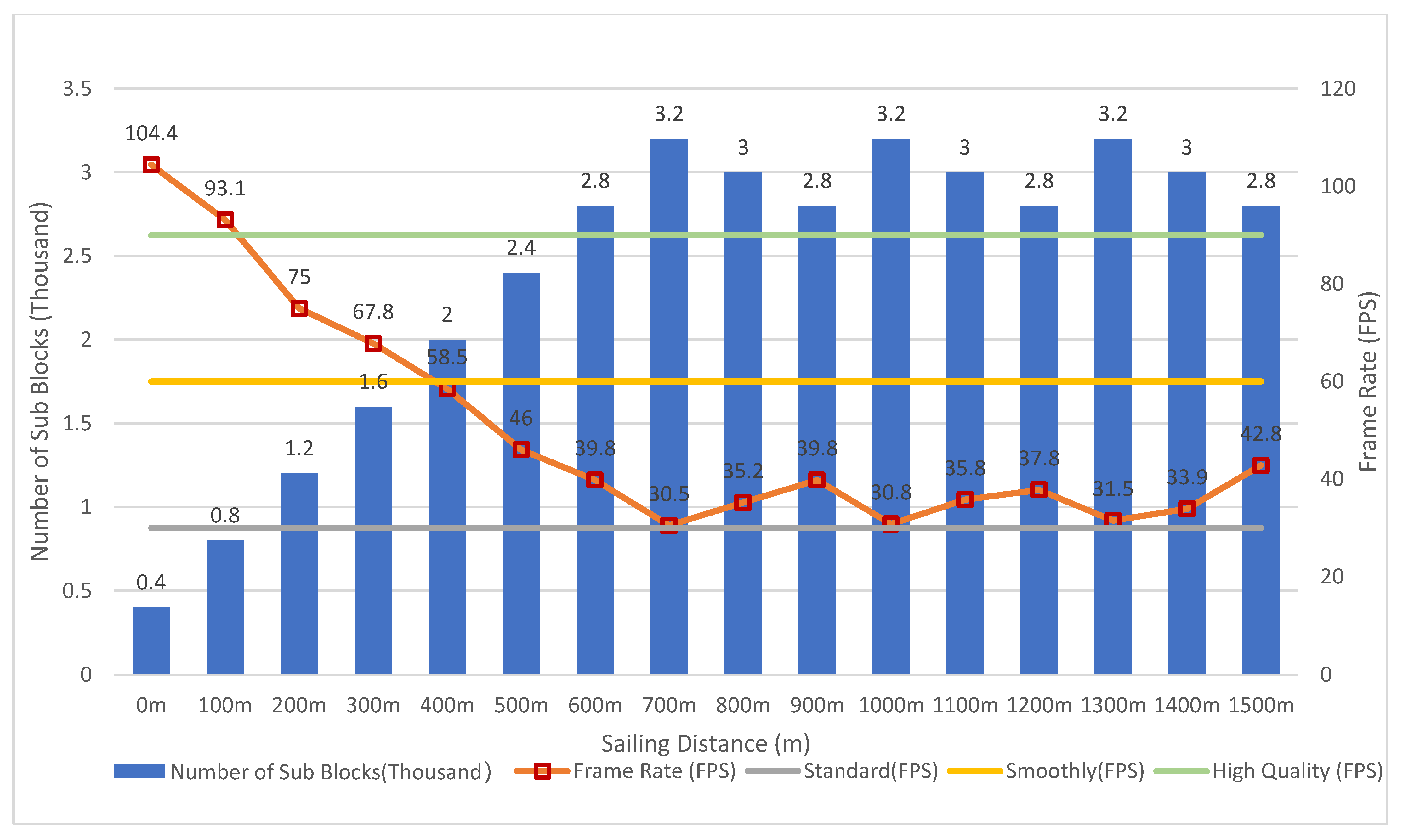
3.1. Experiments Comparing Different Ice Thicknesses
3.2. Experiments Comparing Different Collision Body Setups
3.3. Floating Effect for Broken Ice Floes
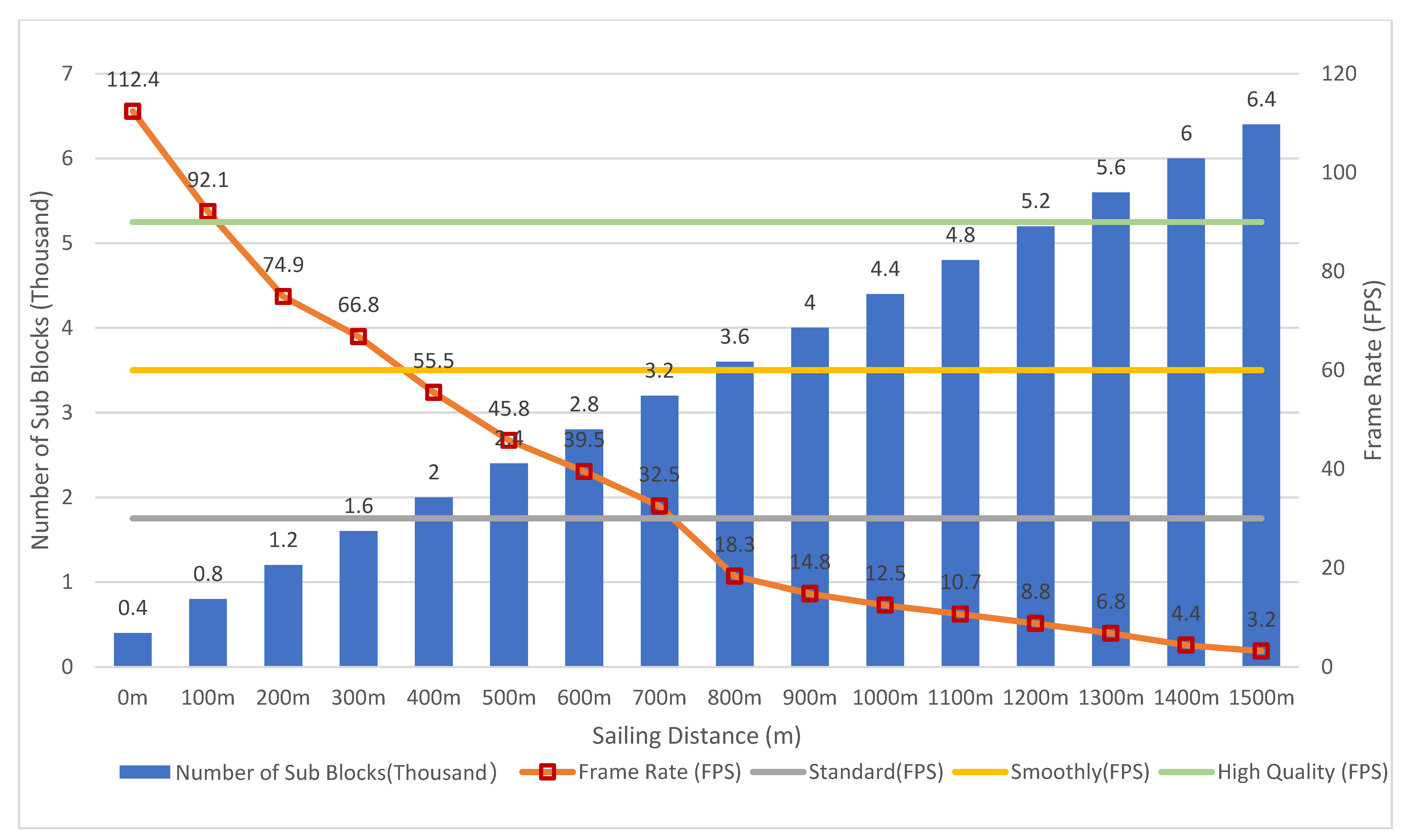
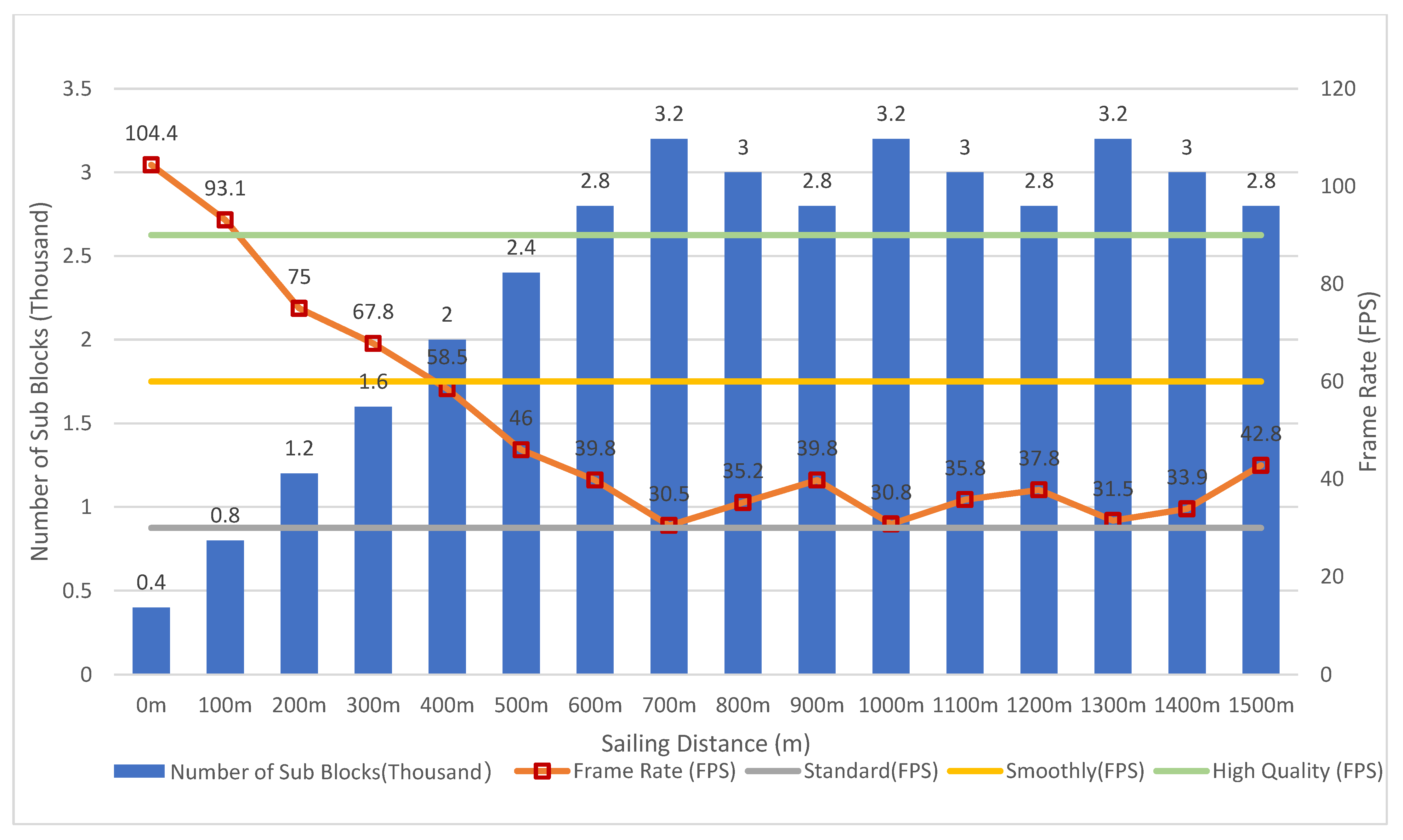
3.4. Improved Quadtree Scene Management
4. Conclusions and Outlook
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Li, H.; Wang, S.; Wang, J.; Yu, L. Development Strategy for Polar Equipment in China. Chin. J. Eng. Sci. 2020, 22, 84–93. [Google Scholar] [CrossRef]
- Information Office of the State Council. China’s Arctic Policy White Paper. Available online: http://www.scio.gov.cn/gxzt/dtzt/2018/zgdbjzcbps/bps_21653/202209/t20220921_430462.html (accessed on 27 April 2023).
- China MSA. The Manila Amendments to the International Convention on Standards of Training, Certification and Watchkeeping for Seafarers, 1978; Dalian Maritime University Press: Dalian, China, 2010. [Google Scholar]
- Admiral Makarov State University of Maritime and Inland Shipping. Introduction to Navigation Simulator in Ice Zone. Available online: https://prof.gumrf.ru/makarovka-stala-operatorom-krupnejshego-ledovogo-uchebnogo-tsentra-v-mire/ (accessed on 27 April 2023).
- Lubbad, R.; Løset, S. A numerical model for real-time simulation of ship–ice interaction. Cold Reg. Sci. Technol. 2011, 65, 111–127. [Google Scholar] [CrossRef]
- Norton, A.; Turk, G.; Bacon, B.; Gerth, J.; Sweeney, P. Animation of fracture by physical modeling. Vis. Comput. 1991, 7, 210–219. [Google Scholar] [CrossRef]
- O’brien, J.F.; Hodgins, J.K. Graphical modeling and animation of brittle fracture. In Proceedings of the 26th Annual Conference on Computer Graphics and Interactive Techniques, Los Angeles, CA, USA, 8–13 August 1999; pp. 137–146. [Google Scholar] [CrossRef]
- Pauly, M.; Keiser, R.; Adams, B.; Dutré, P.; Gross, M.; Guibas, L.J. Meshless animation of fracturing solids. ACM Trans. Graph. 2005, 24, 957–964. [Google Scholar] [CrossRef] [PubMed]
- Steinemann, D.; Otaduy, M.A.; Gross, M. Fast arbitrary splitting of deforming objects. In Proceedings of the 2006 ACM SIGGRAPH/Eurographics Symposium on Computer Animation, Vienna, Austria, 2–4 September 2006; pp. 63–72. [Google Scholar]
- Gingold, Y.; Secord, A.; Han, J.Y.; Grinspun, E.; Zorin, D. A discrete model for inelastic deformation of thin shells. In Proceedings of the ACM SIGGRAPH/Eurographics Symposium on Computer Animation, Grenoble, France, 27–29 August 2004. [Google Scholar]
- Busaryev, O.; Dey, T.K.; Wang, H. Adaptive fracture simulation of multi-layered thin plates. ACM Trans. Graph. 2013, 32, 52. [Google Scholar] [CrossRef]
- Pfaff, T.; Narain, R.; De Joya, J.M.; O’Brien, J.F. Adaptive tearing and cracking of thin sheets. ACM Trans. Graph. 2014, 33, 110. [Google Scholar] [CrossRef]
- Stomakhin, A.; Schroeder, C.; Jiang, C.; Chai, L.; Teran, J.; Selle, A. Augmented MPM for phase-change and varied materials. ACM Trans. Graph. 2014, 33, 138. [Google Scholar] [CrossRef]
- Tampubolon, A.P.; Gast, T.; Klár, G.; Fu, C.; Teran, J.; Jiang, C.; Museth, K. Multi-species simulation of porous sand and water mixtures. ACM Trans. Graph. 2017, 36, 105. [Google Scholar] [CrossRef]
- Hu, Y.; Fang, Y.; Ge, Z.; Qu, Z.; Zhu, Y.; Pradhana, A.; Jiang, C. A moving least squares material point method with displacement discontinuity and two-way rigid body coupling. ACM Trans. Graph. 2018, 37, 150. [Google Scholar] [CrossRef]
- Fan, L.; Chitalu, F.M.; Komura, T. Simulating Brittle Fracture with Material Points. ACM Trans. Graph. 2022, 41, 177. [Google Scholar] [CrossRef]
- Iben, H.N.; O’Brien, J.F. Generating surface crack patterns. Graph. Models 2009, 71, 198–208. [Google Scholar] [CrossRef]
- Glondu, L.; Muguercia, L.; Marchal, M.; Bosch, C.; Rushmeier, H.; Dumont, G.; Drettakis, G. Example-based Fractured Appearance. Comput. Graph. Forum 2012, 31, 1547–1556. [Google Scholar] [CrossRef]
- Makarov, O.; Bekker, A.; Li, L. Comparative analysis of numerical methods for the modeling of ice-structure interaction problems. Contin. Mech. Thermodyn. 2022, 34, 1621–1639. [Google Scholar] [CrossRef]
- Li, F.; Huang, L. A Review of Computational Simulation Methods for a Ship Advancing in Broken Ice. J. Mar. Sci. Eng. 2022, 10, 165. [Google Scholar] [CrossRef]
- Dong, W.; Wang, Z. Simulation Study on Effects of Rigid Body Crushing. Comput. Knowl. Technol. 2021, 17, 5–6. [Google Scholar] [CrossRef]
- Liu, N.; He, X.; Li, S.; Wang, G. Meshless simulation of brittle fracture. Comput. Animat. Virtual Worlds 2011, 22, 115–124. [Google Scholar] [CrossRef]
- Zhao, F.; Zhou, M.; Geng, G. Fracture surface matching method of rigid blocks. J. Image Graph. 2017, 22, 86–95. [Google Scholar] [CrossRef]
- Lyu, C.; Cao, L.; Huo, J.; Liu, X. Diversified Real-time Fracturing Simulation of Rigid Body. J. Image Graph. 2018, 23, 1403–1410. [Google Scholar] [CrossRef]
- Sun, Y.; Yin, Y.; Pan, D. Rendering sea ice dynamic crushing in ice navigation scene based on Voronoi algorithm. Chin. J. Stereol. Image Anal. 2018, 23, 150–158. [Google Scholar] [CrossRef]
- Fan, H. Research on Key Technologies of 3D Vision System for Ice Area Navigation Simulator; Jimei University: Xiamen, China, 2019. [Google Scholar]
- Shao, X.; Zhang, X.; Yang, S.; Jin, Y. SPH fluid-solid interacted real-time solid fracture animation. J. Image Graph. 2023, 28, 2447–2460. [Google Scholar] [CrossRef]
- Wu, X.; Lie, T.; Huang, G.; Wu, X. Research and Application of Complexity Scene Scheduling Strategy Based on Virtual Reality. J. Yangze Univ. (Nat. Sic Ed.) 2008, 5, 59–61. [Google Scholar]
- He, R.; Shi, C.; Chang, W.; Wang, L. Application Research of Large-scale Terrain Dynamic Rendering Based on OSG. Comput. Digit. Eng. 2017, 45, 2022–2026. [Google Scholar] [CrossRef]
- Chen, M. Optimized Scheduling Method Based on Maximum Flow Model for Complex City Scene Data; Southwest Jiaotong University: Chengdu, China, 2021. [Google Scholar]
- Sun, Y.; Yin, Y.; Jin, Y.; Gao, S. Algorithm for Sea Ice Model Scene Management Based on Spatial Index. J. Syst. Simul. 2015, 27, 2427–2431. [Google Scholar] [CrossRef]
- Sun, Y.; Yin, Y.; Gao, S. Research on Visualization of Ice Navigation in Marine Simulator. J. Syst. Simul. 2012, 24, 49–53. [Google Scholar] [CrossRef]
- Zhou, P. Computational Geometry: Algorithm Design, Analysis and Application; Tsinghua University Press: Beijing, China, 2016. [Google Scholar]
- Peng, X.; Ren, H.; Yu, J. Simulation training system of marine remote control grab. J. Dalian Marit. Univ. 2019, 45, 33–39. [Google Scholar] [CrossRef]
- Jingyuan, W. Performance Analysis of Buoyancy Module of Marine Flexible Pipe System. Master’s Thesis, Dalian University of Technology, Dalian, China, 2021. [Google Scholar] [CrossRef]
- Huang, L.; Wen, Y. Maritime Meteorology and Oceanography; Wuhan University of Technology Press: Wuhan, China, 2014. [Google Scholar]
- Zhong, Z.; Luo, L. Handbook of Basic Physics; Guangxi People’s Publishing House: Nanning, China, 1983. [Google Scholar]
- Zhang, J.; Ruan, C. A Triangle Rasterization Based on Improved Bresenham Algorithm. Electron. Meas. Technol. 2019, 42, 86–89. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Fractal Algorithm | Conduction Cracking | Floating Effect | Scene Management | |
|---|---|---|---|---|
| Fan [26] | Voronoi | No | No | Quadtree |
| Sun [32] | Improved Koch Curve | No | No | No |
| Sun [31] | Voronoi | No | No | Quadtree |
| This study | Improved Voronoi | Yes | Yes | Improved Quadtree |
| Ice thickness | 1 m |
| Ice density | 900 kg/m3 |
| Ice modulus of elasticity | 3 Gpa |
| Poisson’s ratio | 0.33 |
| Seawater density | 1025 kg/m3 |
| Acceleration of gravity | 9.81 m/s2 |
| The radius of the distributed load | 0.5 m |
| The uniformly distributed vertical load | 291 kPa |
| The flexural strength of the ice | 500 kPa |
| Number of generated wedges | 3 | 4 | 5 |
| The angle of each wedge [deg] | 60 | 45 | 36 |
| The distance of the distributed load from the apex [m] | 0.5 | 0.5 | 0.5 |
| The maximum load capacity of each wedge [kN] | 113 | 81 | 64 |
| The breaking length [m] | 4.5 | 4.5 | 4.5 |
| The volume of each broken ice piece [m3] | 11.7 | 8.4 | 6.6 |
| The mass of each broken ice piece [tons] | 10.5 | 7.5 | 5.9 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, B.; Ren, H.; Qiu, S.; Yang, X.; Liao, G.; Liang, X. Simulation of Sea Ice Fragmentation Based on an Improved Voronoi Diagram Algorithm in an Ice Zone Navigation Simulator. J. Mar. Sci. Eng. 2023, 11, 2047. https://doi.org/10.3390/jmse11112047
Zhang B, Ren H, Qiu S, Yang X, Liao G, Liang X. Simulation of Sea Ice Fragmentation Based on an Improved Voronoi Diagram Algorithm in an Ice Zone Navigation Simulator. Journal of Marine Science and Engineering. 2023; 11(11):2047. https://doi.org/10.3390/jmse11112047
Chicago/Turabian StyleZhang, Boxiang, Hongxiang Ren, Shaoyang Qiu, Xiao Yang, Gongming Liao, and Xiao Liang. 2023. "Simulation of Sea Ice Fragmentation Based on an Improved Voronoi Diagram Algorithm in an Ice Zone Navigation Simulator" Journal of Marine Science and Engineering 11, no. 11: 2047. https://doi.org/10.3390/jmse11112047
APA StyleZhang, B., Ren, H., Qiu, S., Yang, X., Liao, G., & Liang, X. (2023). Simulation of Sea Ice Fragmentation Based on an Improved Voronoi Diagram Algorithm in an Ice Zone Navigation Simulator. Journal of Marine Science and Engineering, 11(11), 2047. https://doi.org/10.3390/jmse11112047