
An Improved Hydraulic Power Take-Off Unit Based on Dual Fluid Energy Storage for Reducing the Power Fluctuation Problem in the Wave Energy Conversion System

 and
and
Abstract
:1. Introduction
2. WECs Concept
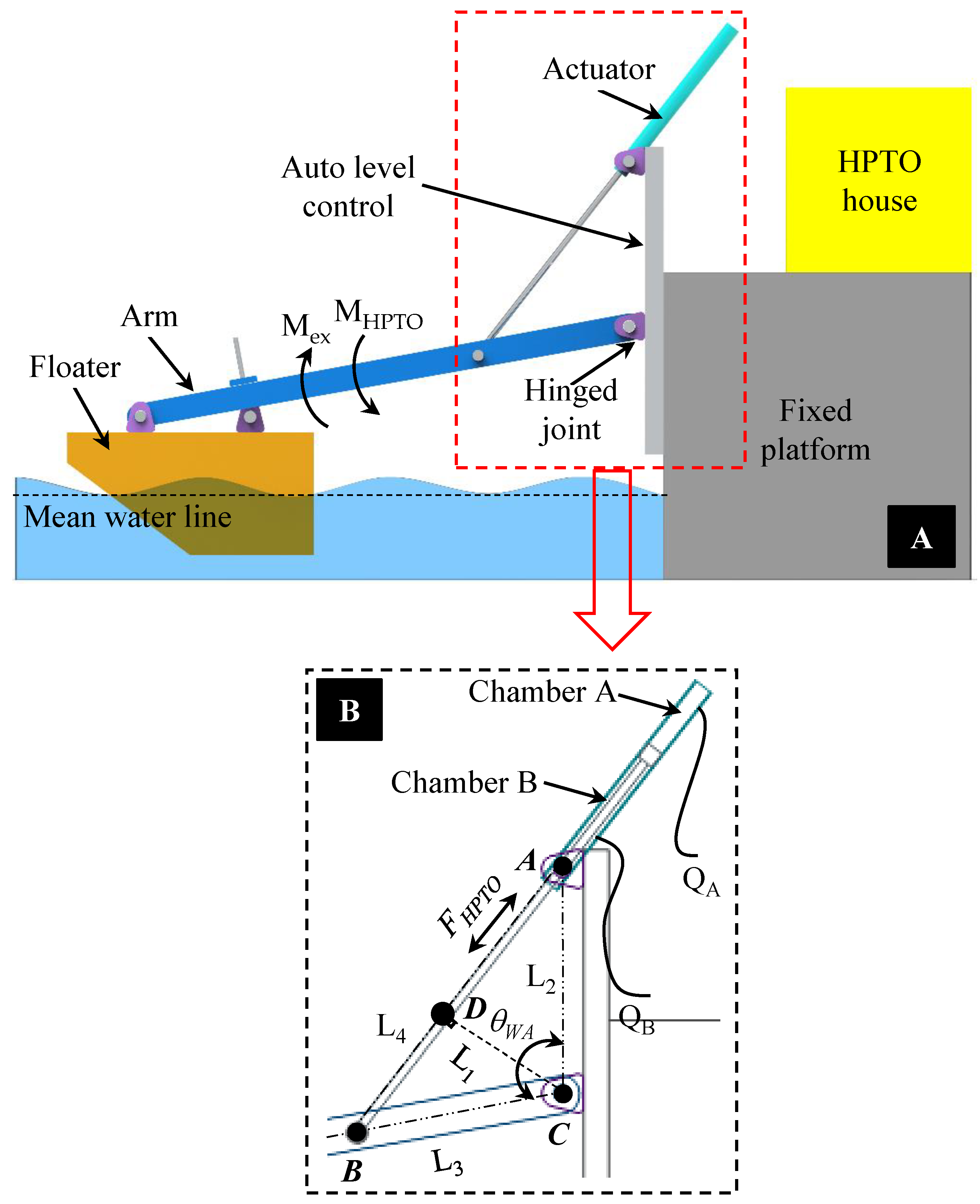
2.1. Descriptions of WA Concept
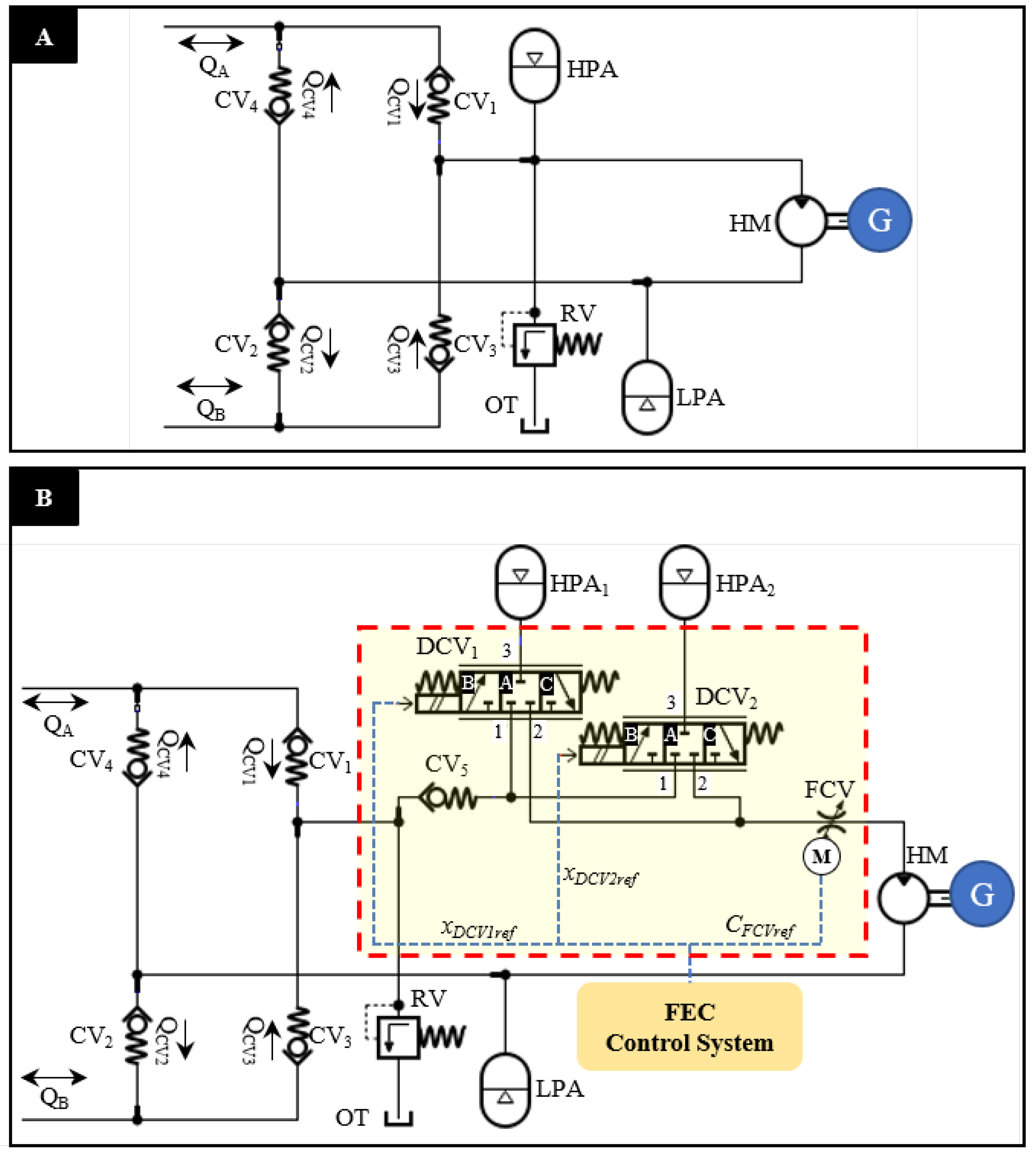
2.2. Descriptions of the Improved HPTO Concept
3. Wave-to-Wire Model of the Considered WECs
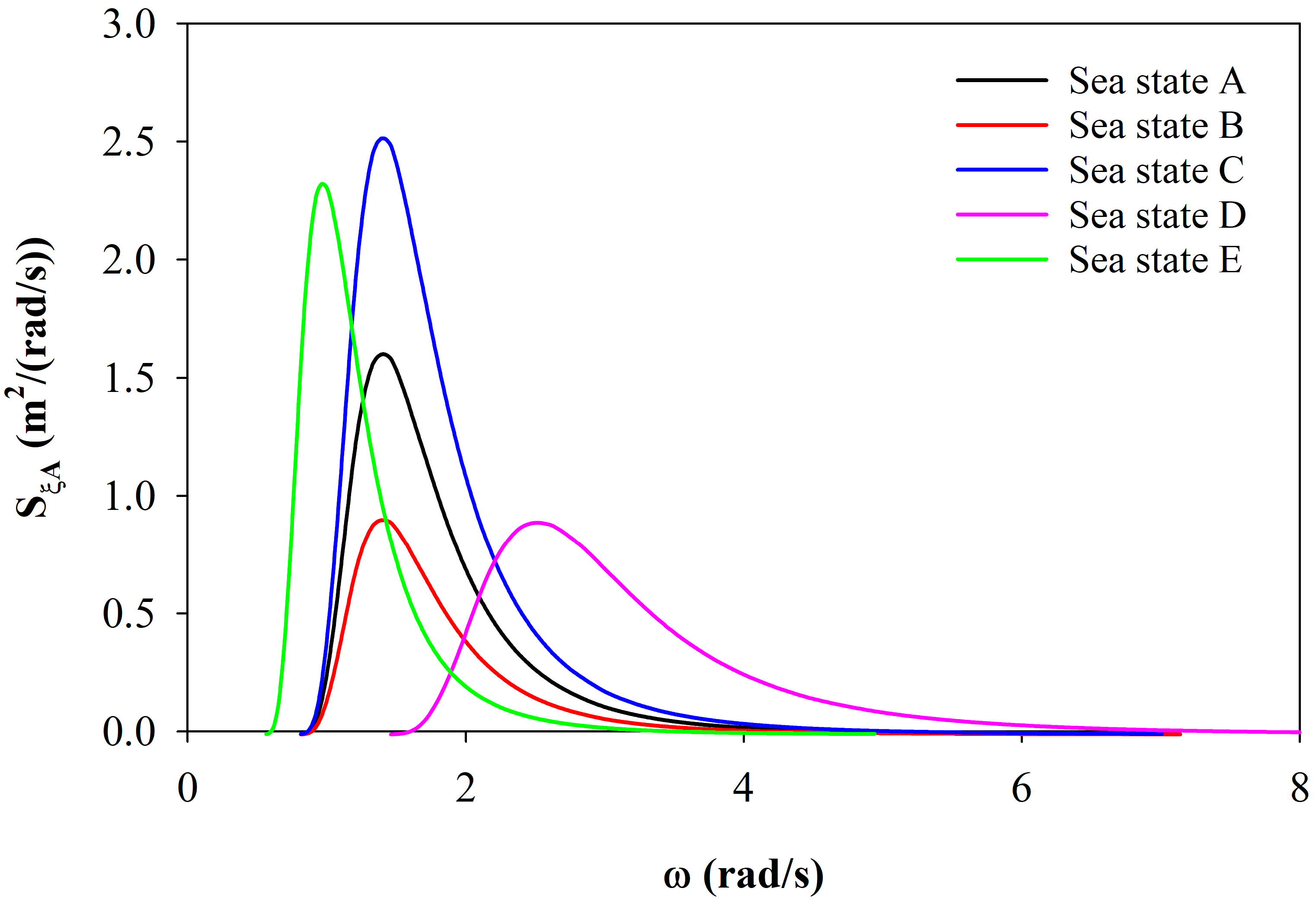
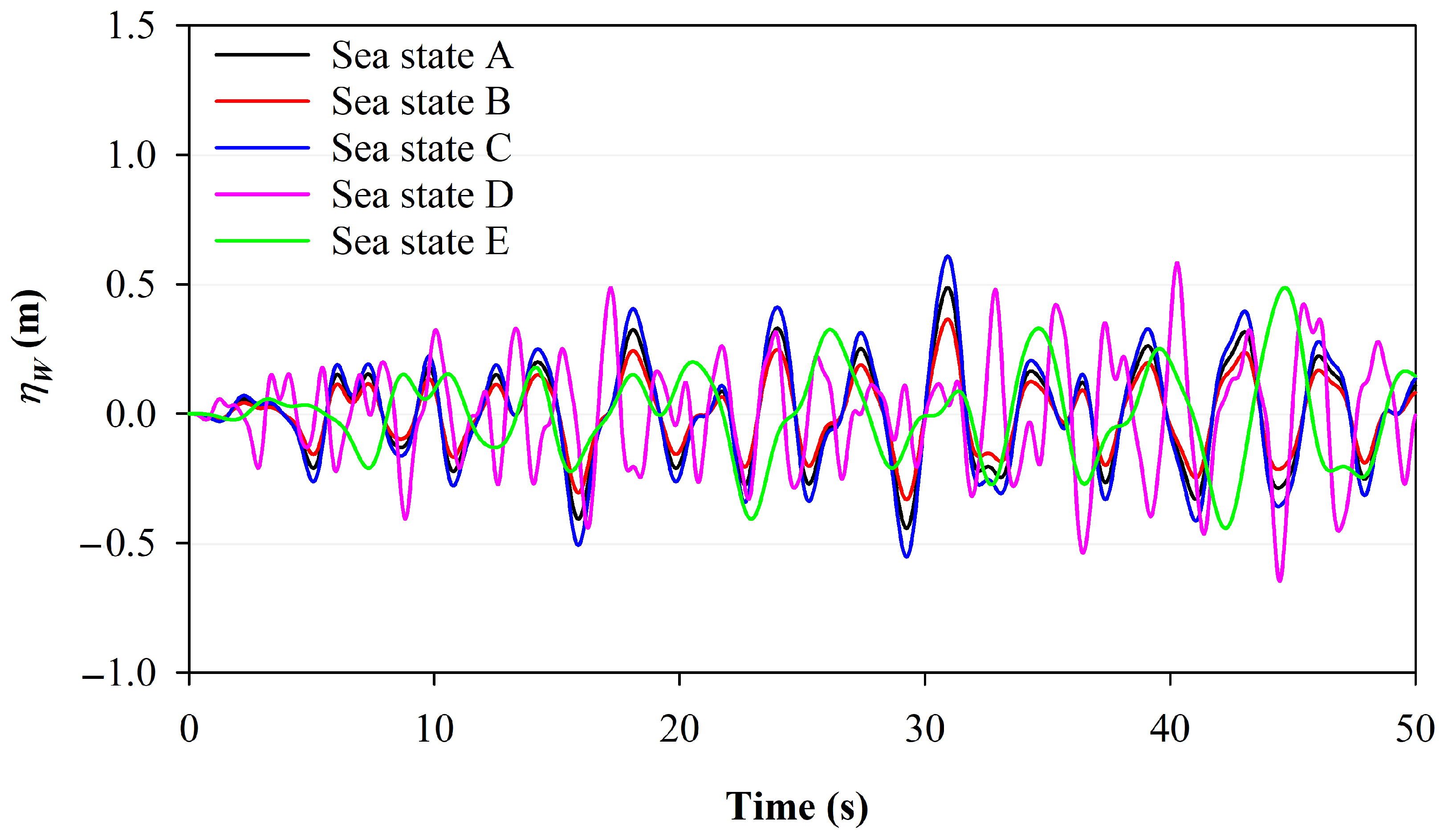
3.1. Irregular Wave Inputs
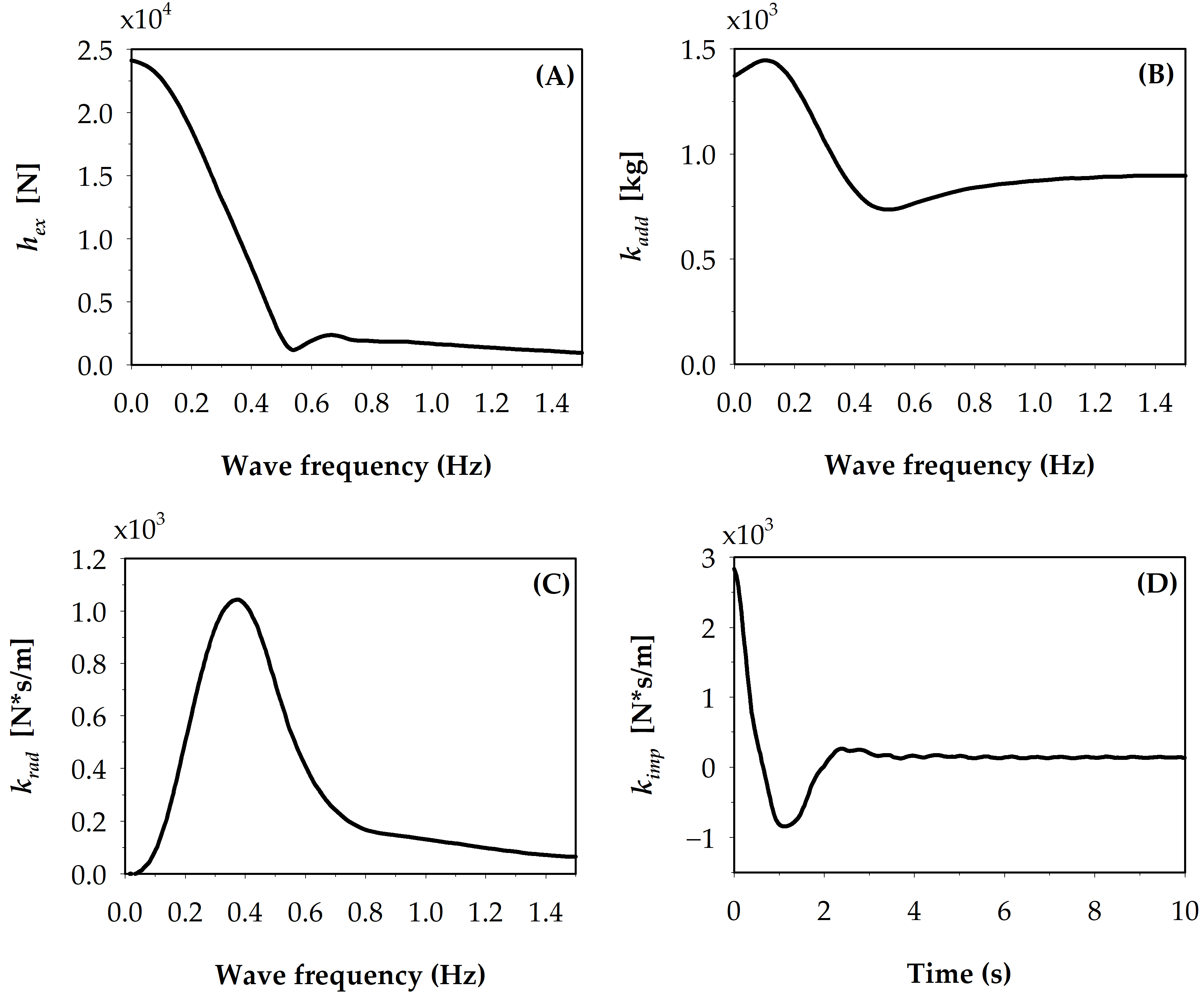
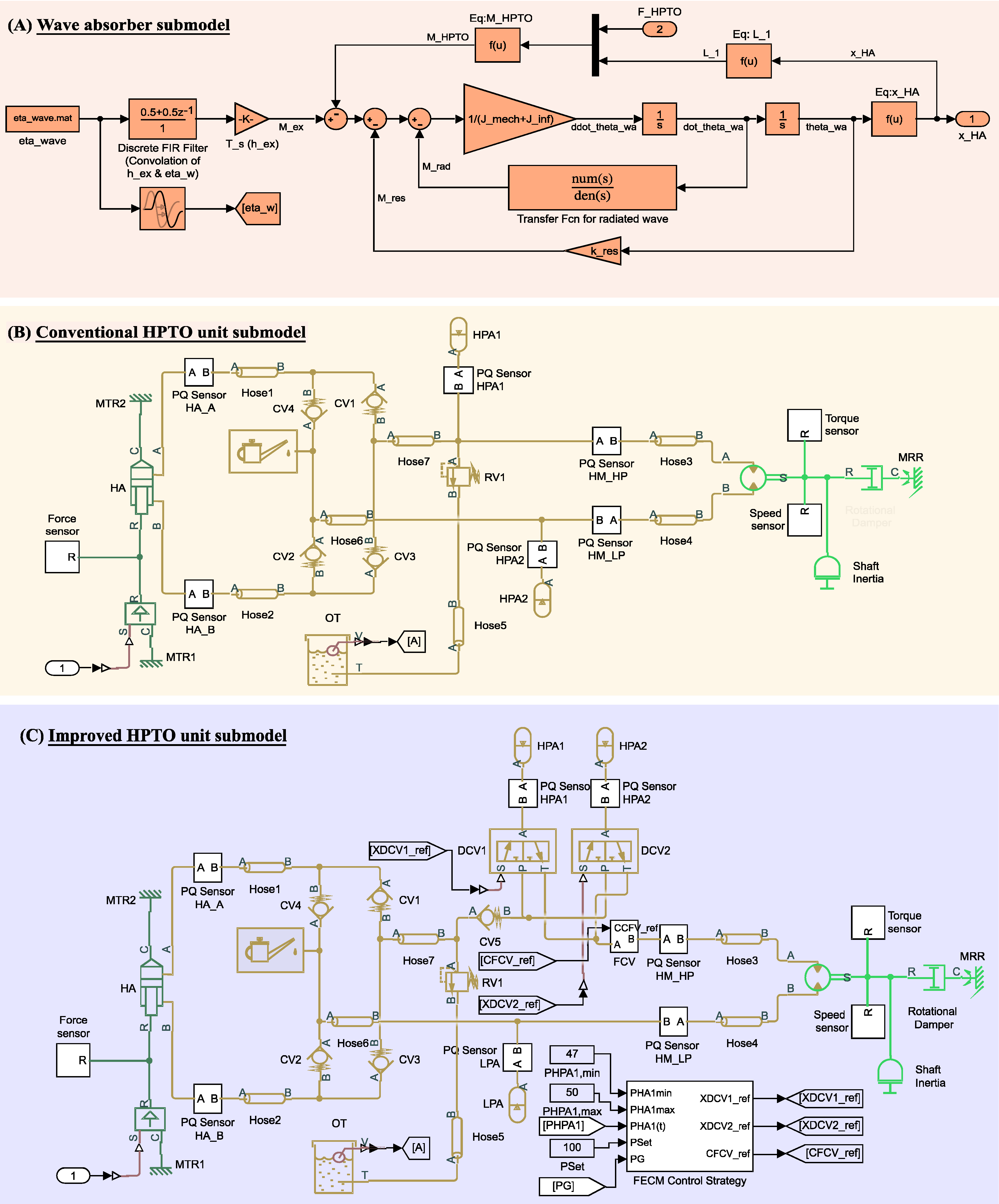
3.2. Dynamic Model of the WA Device
3.3. HPTO Unit Models
3.4. Determination of Optimal Parameters of FEC Control Strategy Using Genetic Algorithm
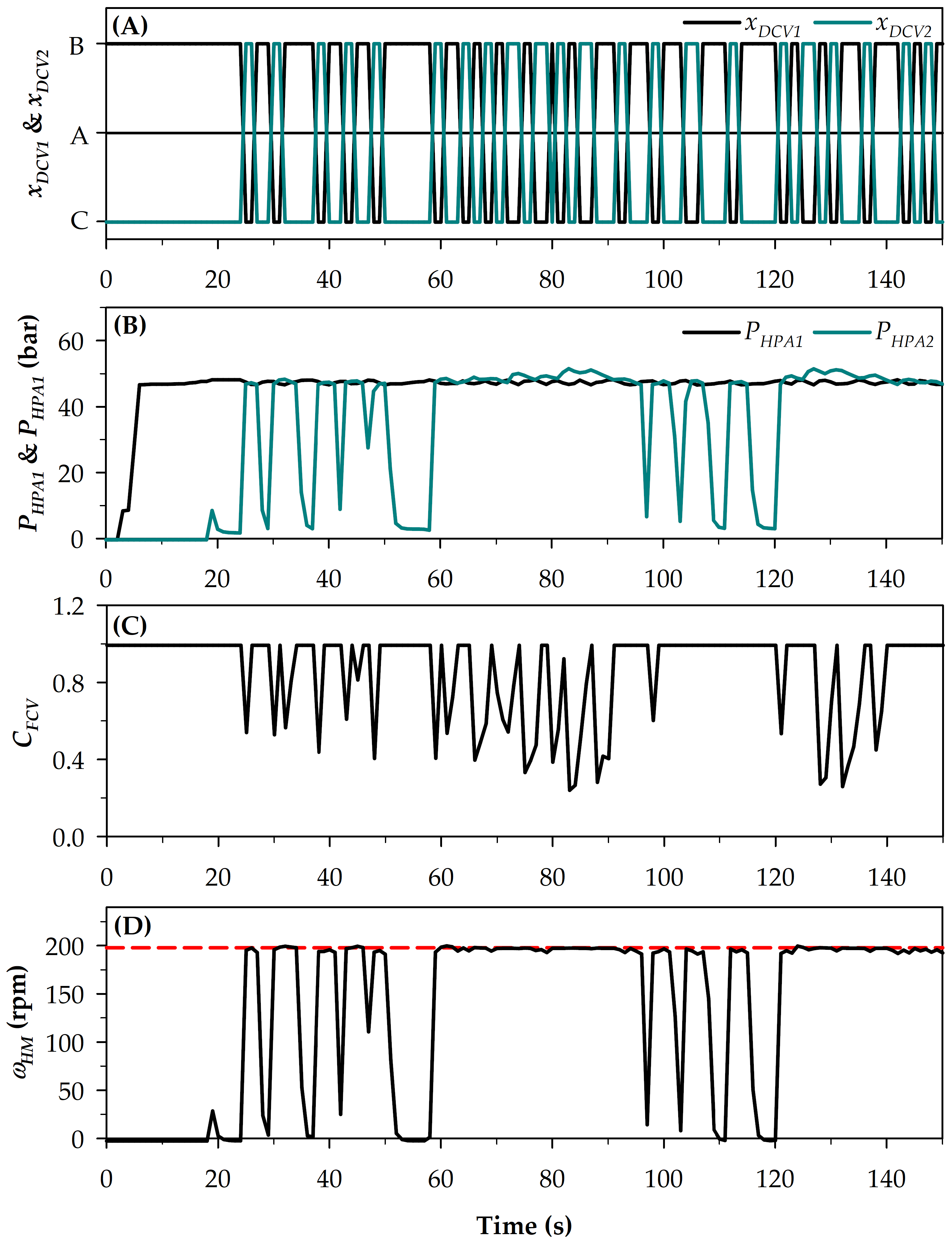
3.5. Simulation Analysis of the Improved HPTO Unit
4. Results and Discussions
4.1. Optimal Parameters of FEC Control Strategy
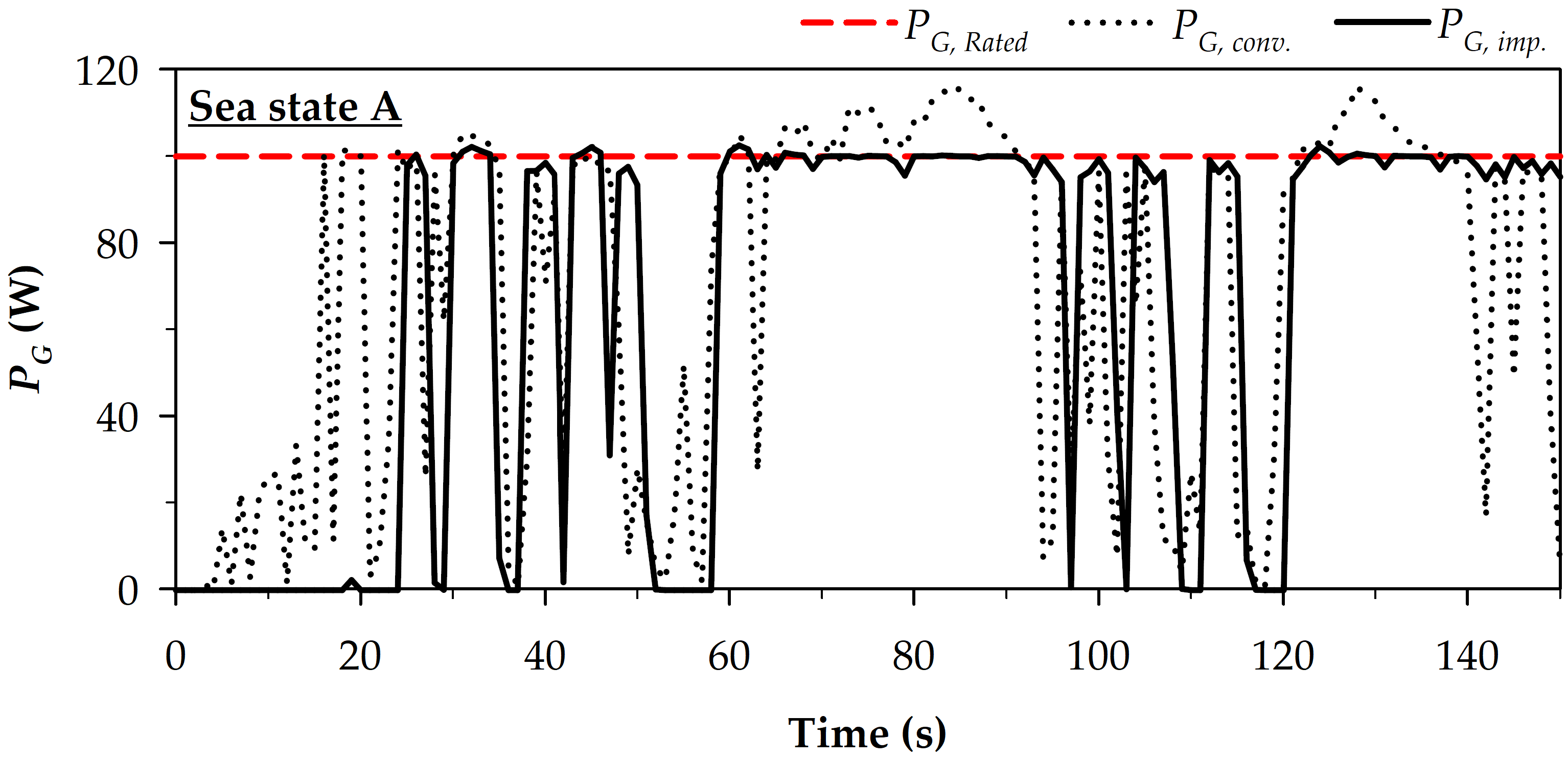
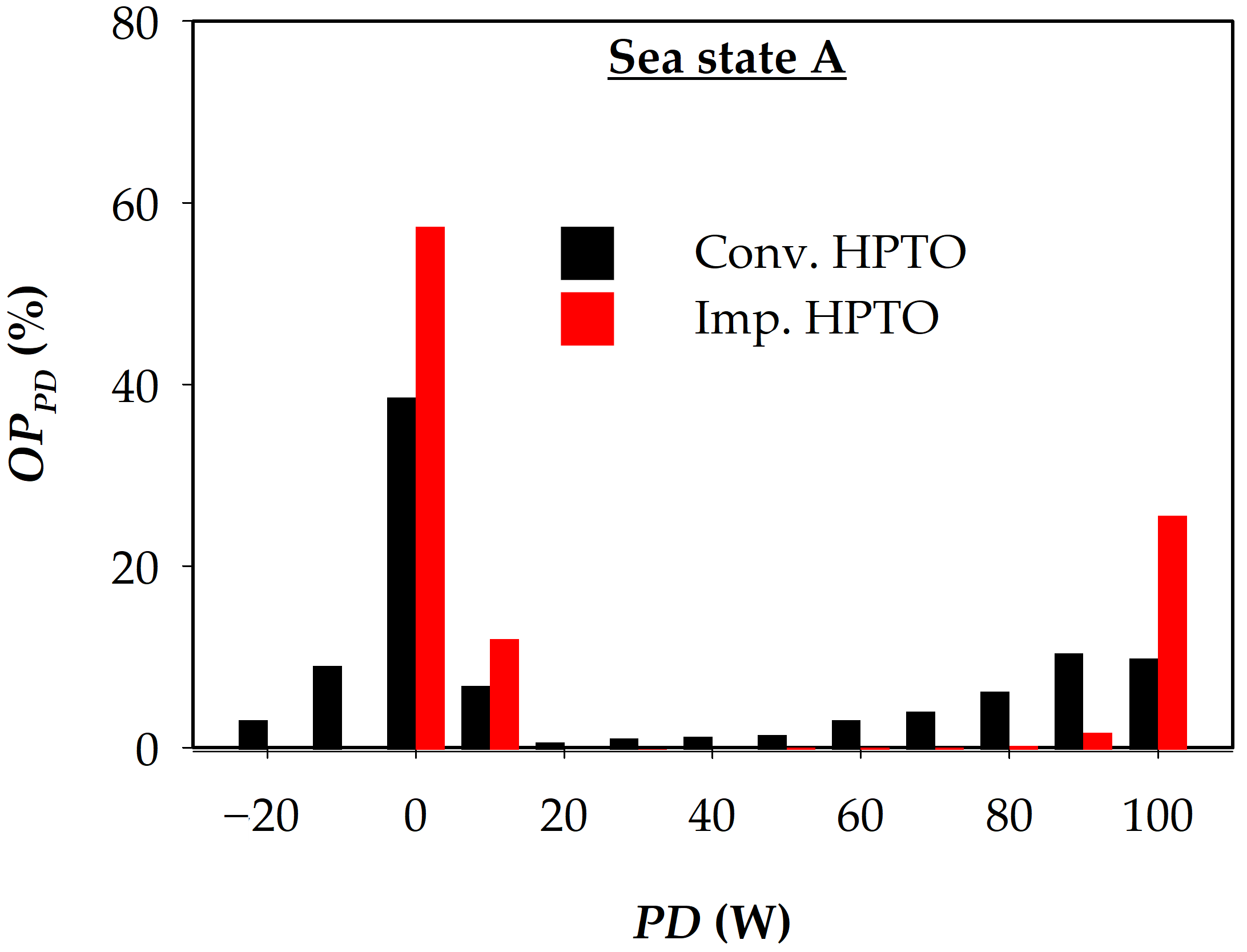
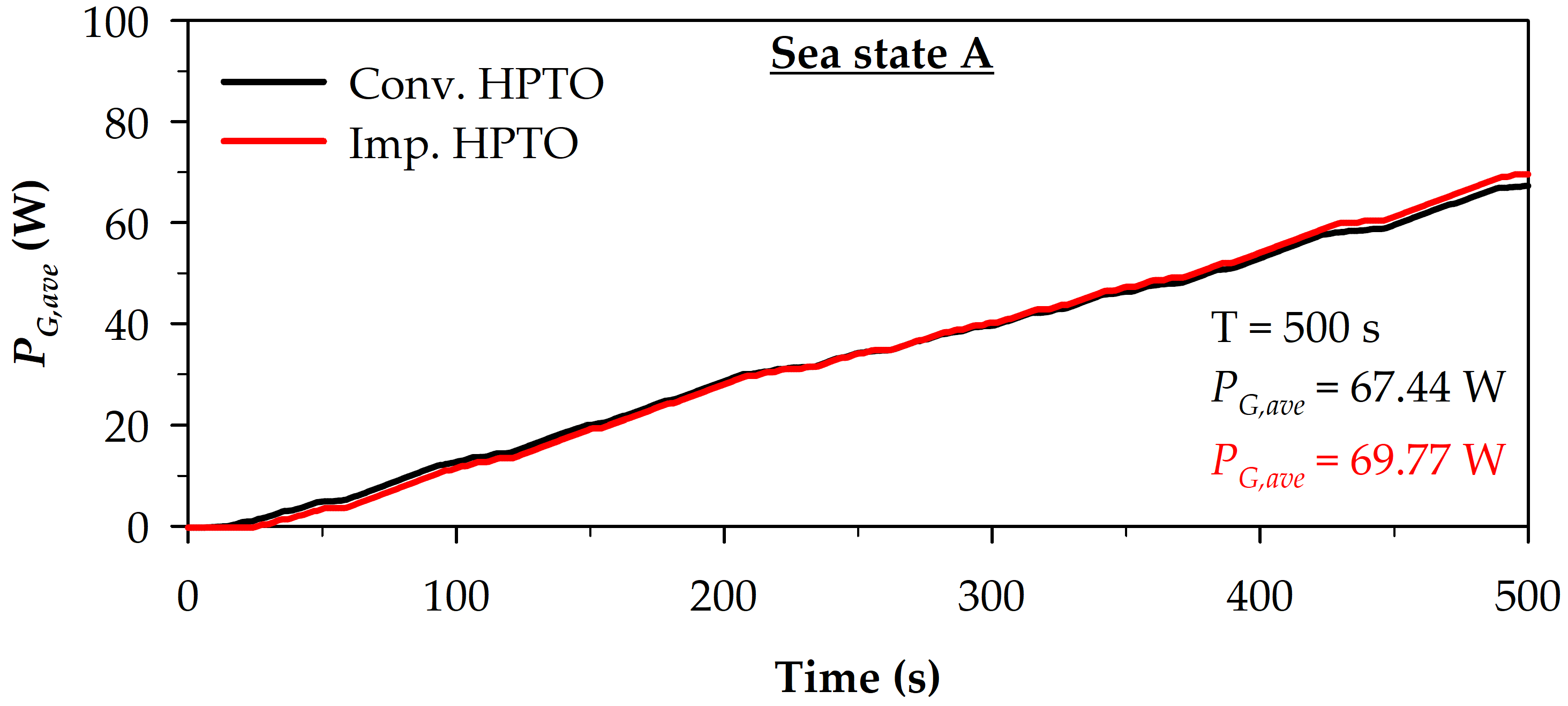
4.2. Evaluation of an Improved HPTO Unit Nominal Sea State (Sea State A)
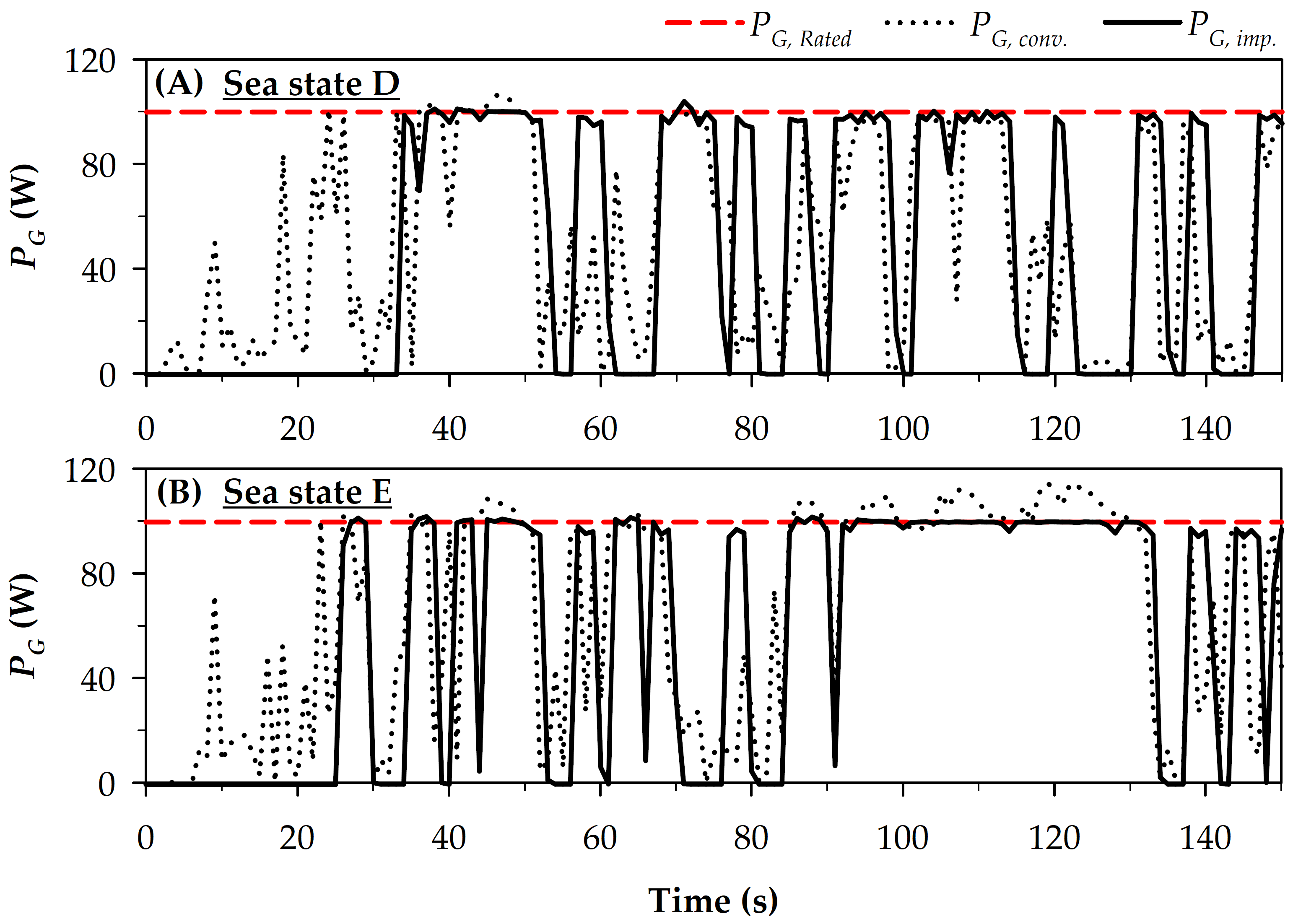
4.3. Evaluation of an Improved HPTO Unit in Different Significant Wave Height and Peak Wave Period Inputs (Sea State B, C, D, and E)
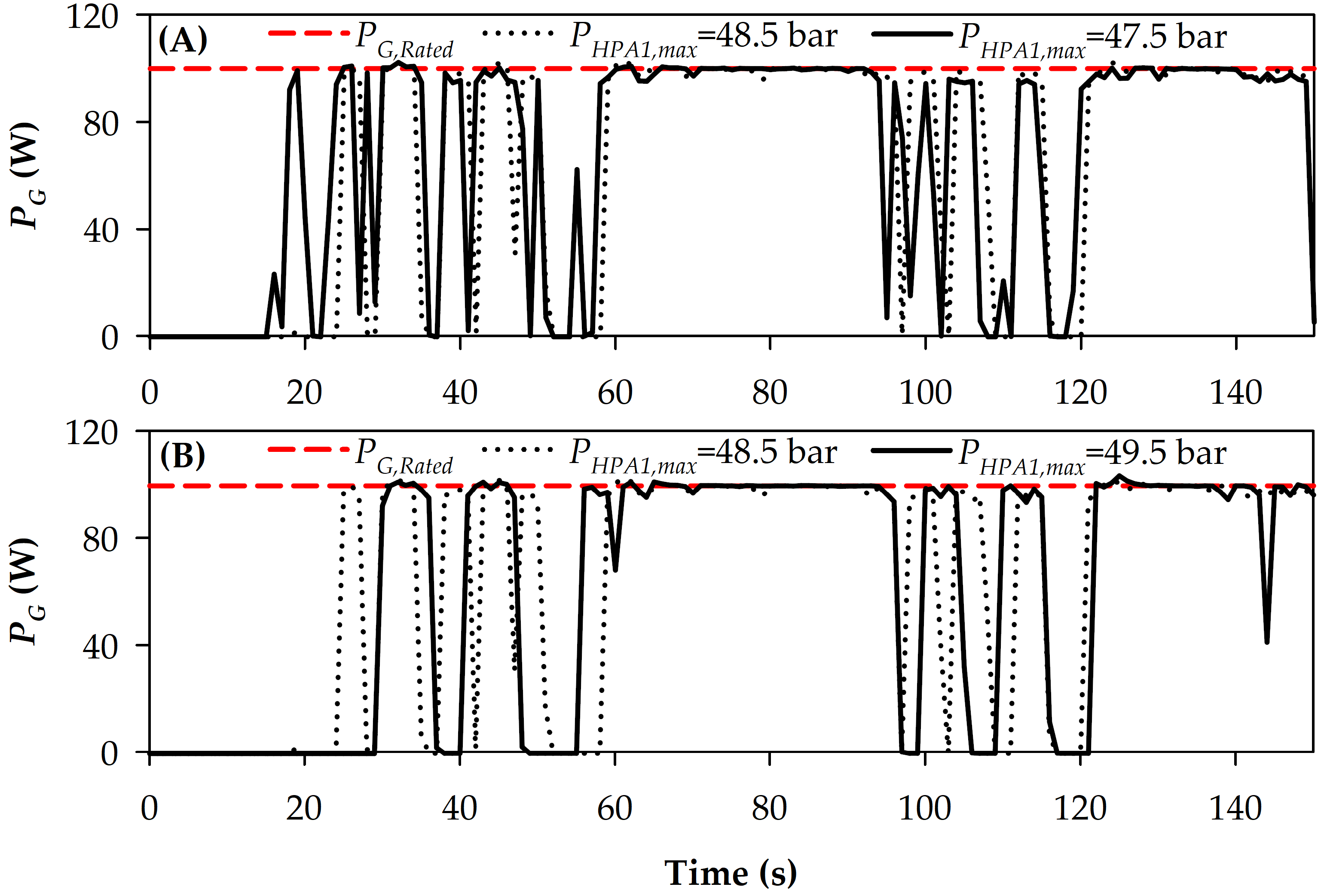
4.4. Effect of HPA1 Pressure Constraint on the Improved HPTO Unit Output
5. Conclusions
- The genetic algorithm was introduced to obtain the optimal parameters of the control strategy for the improved HPTo unit. The optimization process of the control strategy parameters was carried out for 7 h 30 min.
- By employing the improved HPTO unit, the unnecessary fluctuations in the generated electrical power from the WECs were significantly reduced. The integration between the dual HPA module and FEC module in the improved HPTO unit transformed the high-fluctuation electrical power to a more stable electrical power. The improved HPTO unit could generate electricity at the rated capacity during 57.6% of WECs operation during nominal sea state.
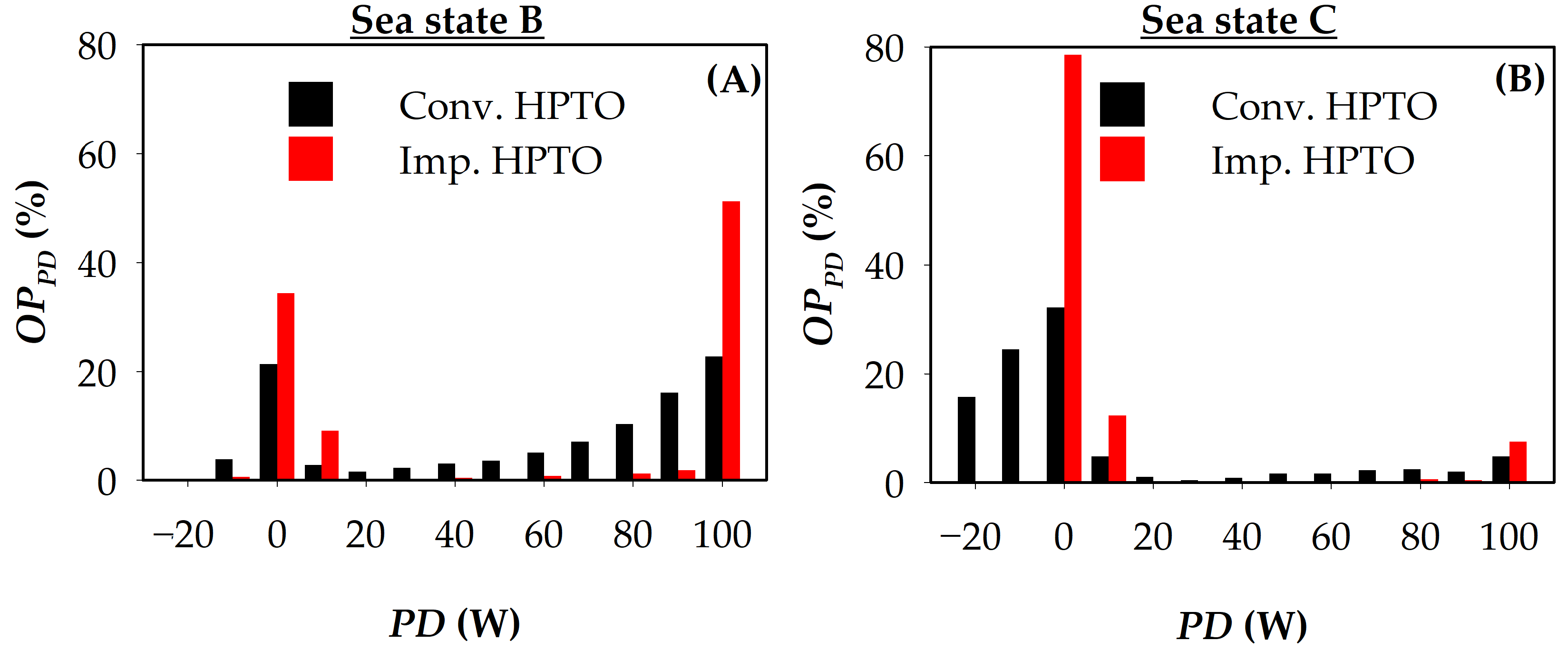
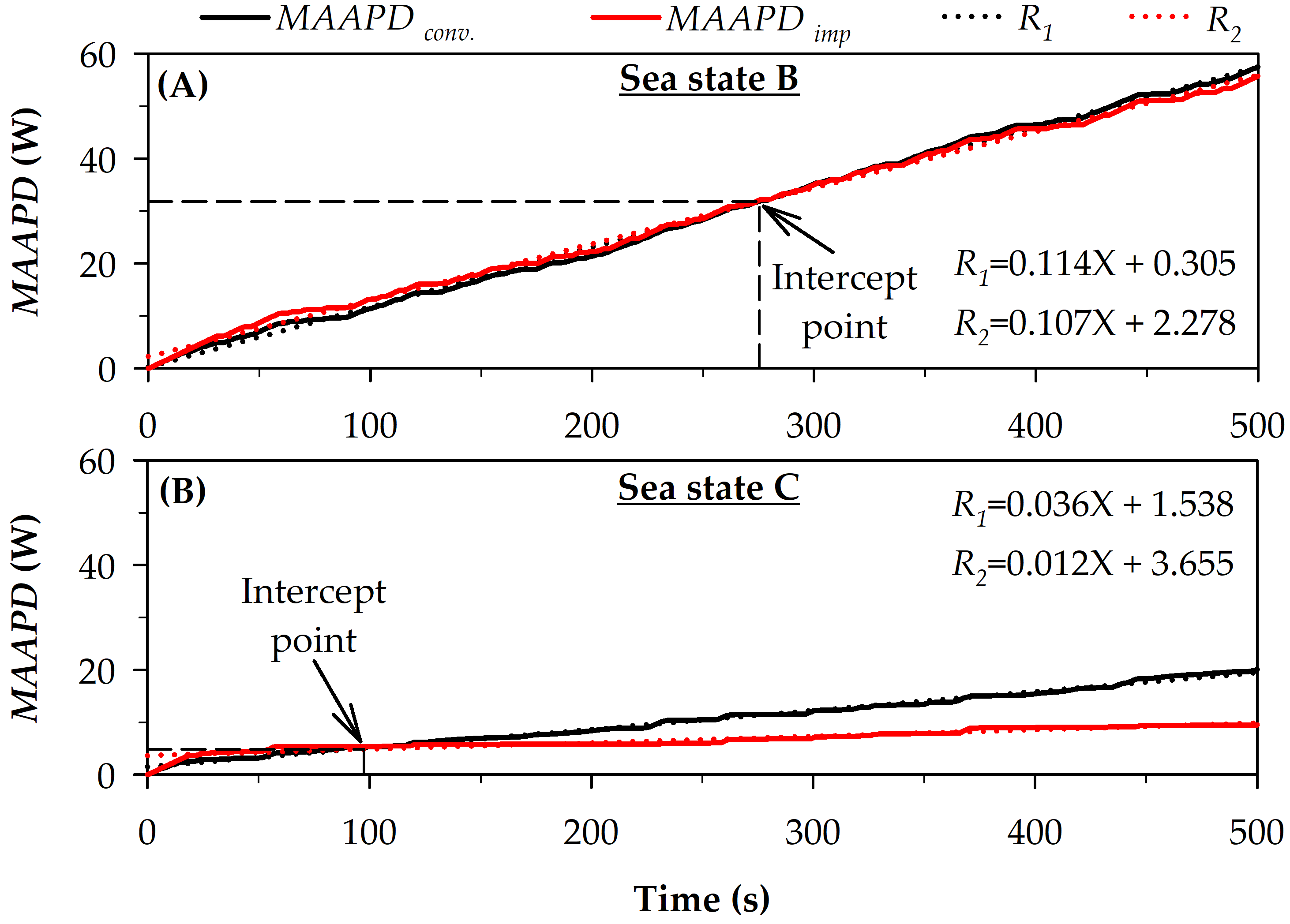
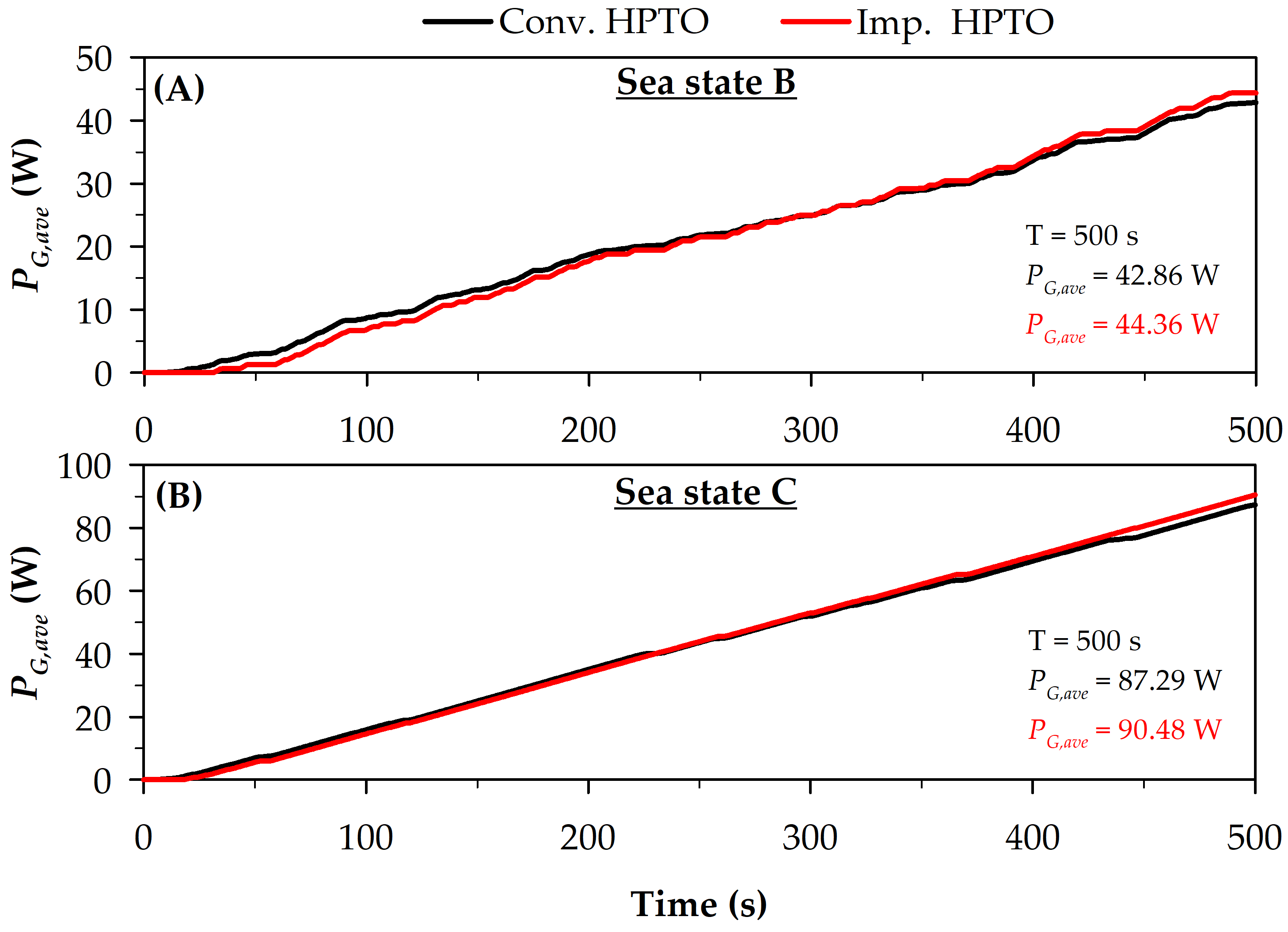
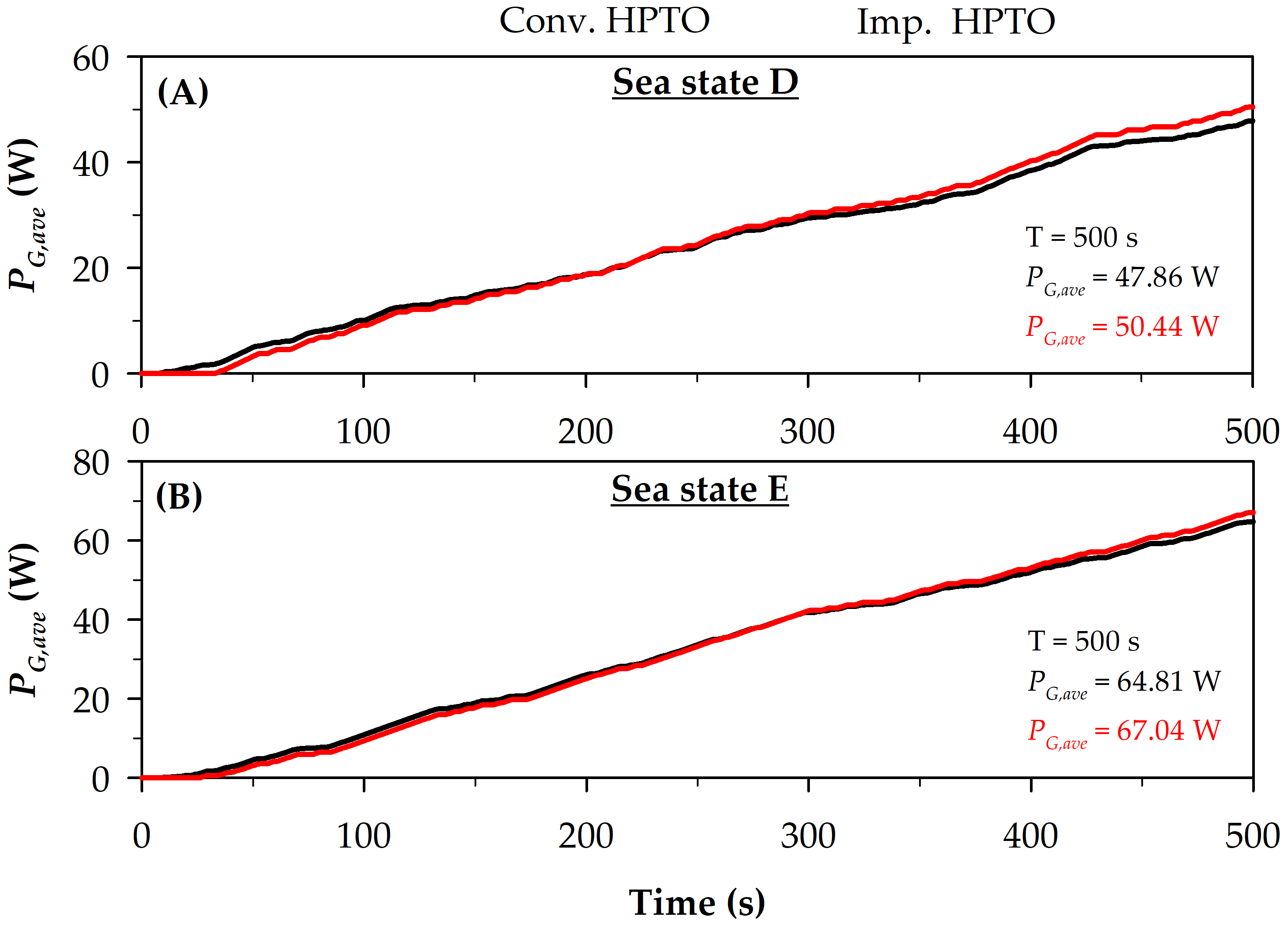
- The performances of the improved HPTO unit at the different sea states were also higher than the conventional HPTO unit performance. At the lower (sea state B) and higher (sea state C) wave height sea states, the improved HPTO unit could generate electricity at the rated capacity during 34.3% and 78.6% of WECs operation. At the lower (sea state D) and higher (sea state E) wave period sea states, the improved HPTO unit could generate the electricity at the rated capacity during 37.3% and 53.7% of WECs operation, respectively.
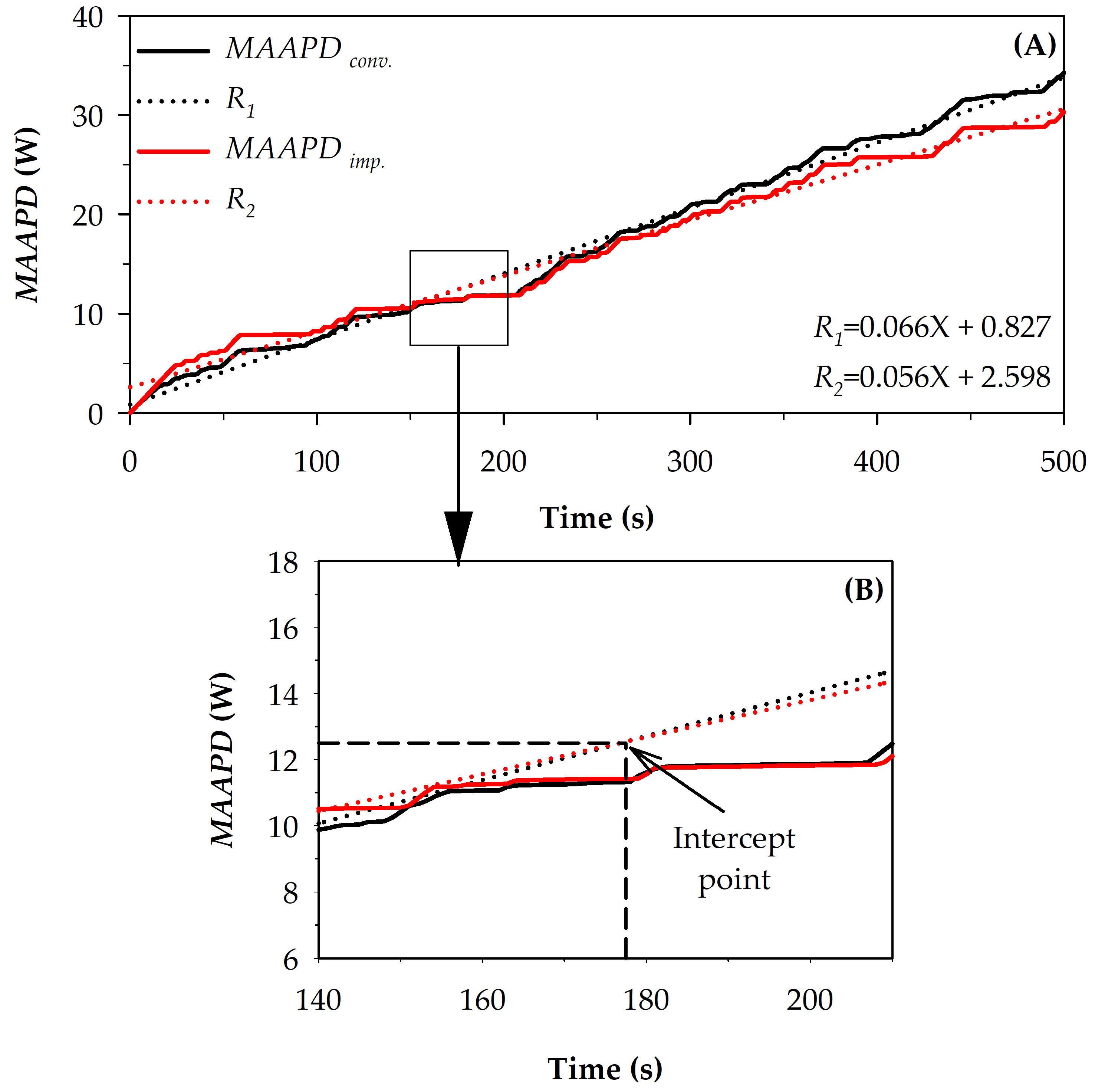
- Overall, the lower and the higher setting significantly influences the average of and the power fluctuation occurrences. The average of was reduced up to 69 W and 67.4 W when the setting was set to 47.5 bar and 51.5 bar, respectively.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| CS | Control System |
| CV | Check Valve |
| DCV | Directional Control Valve |
| FCV | Flow Control Valve |
| FEC | Fluid Energy Control |
| GA | Genetic Algorithm |
| HA | Hydraulic Actuator |
| HM | Hydraulic Motor |
| HPA | High Pressure Accumulator |
| HPTO | Hydraulic Power Take-Off |
| LPA | Low Pressure Accumulator |
| LVQNN | Learning Vector Quantitative Neural Network |
| NLPQL | Non-Linear Programming by Quadratic Lagrangian |
| PTO | Power Take-Off |
| RV | Relief Valve |
| WA | Wave Absorber |
| WAB | Wave-Activated-Body |
| WECs | Wave Energy Conversion System |
References
- Melikoglu, M. Current status and future of ocean energy sources: A global review. Ocean Eng. 2018, 148, 563–573. [Google Scholar] [CrossRef]
- Rusu, E.; Onea, F. A review of the technologies for wave energy extraction. Clean Energy 2018, 2, 10–19. [Google Scholar] [CrossRef] [Green Version]
- Titah-Benbouzid, H.; Benbouzid, M. An up-to-date technologies review and evaluation of wave energy converters. Int. Rev. Electr. Eng. 2015, 10, 52–61. [Google Scholar] [CrossRef]
- Farrok, O.; Ahmed, K.; Tahlil, A.D.; Farah, M.M.; Kiran, M.R.; Islam, M.R. Electrical power generation from the oceanic wave for sustainable advancement in renewable energy technologies. Sustainability 2020, 12, 2178. [Google Scholar] [CrossRef] [Green Version]
- Ilyas, A.; Kashif, S.A.; Saqib, M.A.; Asad, M.M. Wave electrical energy systems: Implementation, challenges and environmental issues. Renew. Sustain. Energy Rev. 2014, 40, 260–268. [Google Scholar] [CrossRef]
- Yusop, Z.M.; Ibrahim, M.Z.; Jusoh, M.A.; Albani, A.; Rahman, S.J.A. Wave-Activated Body Energy Converter Technologies: A Review. J. Adv. Res. Fluid Mech. Therm. Sci. 2020, 76, 76–104. [Google Scholar] [CrossRef]
- Wang, L.; Kolios, A.; Cui, L.; Sheng, Q. Flexible multibody dynamics modelling of point-absorber wave energy converters. Renew. Energy 2018, 127, 790–801. [Google Scholar] [CrossRef]
- Ozkop, E.; Altas, I.H. Control, power and electrical components in wave energy conversion systems: A review of the technologies. Renew. Sustain. Energy Rev. 2017, 67, 106–115. [Google Scholar] [CrossRef]
- He, X.; Xiao, G.; Hu, B.; Tan, L.; Tang, H.; He, S.; He, Z. The applications of energy regeneration and conversion technologies based on hydraulic transmission systems: A review. Energy Convers. Manag. 2020, 205, 112413. [Google Scholar] [CrossRef]
- Jusoh, M.A.; Ibrahim, M.Z.; Daud, M.Z.; Albani, A.; Yusop, Z.M. Hydraulic power take-off concepts for wave energy conversion system: A review. Energies 2019, 12, 4510. [Google Scholar] [CrossRef] [Green Version]
- Wang, L.; Isberg, J.; Tedeschi, E. Review of control strategies for wave energy conversion systems and their validation: The wave-to-wire approach. Renew. Sustain. Energy Rev. 2018, 81, 366–379. [Google Scholar] [CrossRef]
- Penalba, M.; Ringwood, J.V.; Penalba, M.; Ringwood, J.V. A Review of Wave-to-Wire Models for Wave Energy Converters. Energies 2016, 9, 506. [Google Scholar] [CrossRef] [Green Version]
- Zhang, D.; Li, W.; Lin, Y.; Bao, J. An overview of hydraulic systems in wave energy application in China. Renew. Sustain. Energy Rev. 2012, 16, 4522–4526. [Google Scholar] [CrossRef]
- Lin, Y.; Bao, J.; Liu, H.; Li, W.; Tu, L.; Zhang, D. Review of hydraulic transmission technologies for wave power generation. Renew. Sustain. Energy Rev. 2015, 50, 194–203. [Google Scholar] [CrossRef]
- Kurniawan, A.; Pedersen, E.; Moan, T. Bond graph modelling of a wave energy conversion system with hydraulic power take-off. Renew. Energy 2012, 38, 234–244. [Google Scholar] [CrossRef]
- Tri, N.M.; Truong, D.Q.; Thinh, D.H.; Binh, P.C.; Dung, D.T.; Lee, S.; Park, H.G.; Ahn, K.K. A novel control method to maximize the energy-harvesting capability of an adjustable slope angle wave energy converter. Renew. Energy 2016, 97, 518–531. [Google Scholar] [CrossRef]
- Ding, B.; Cazzolato, B.S.; Arjomandi, M.; Hardy, P.; Mills, B. Sea-state based maximum power point tracking damping control of a fully submerged oscillating buoy. Ocean Eng. 2016, 126, 299–312. [Google Scholar] [CrossRef]
- Pedersen, H.C.; Hansen, R.H.; Hansen, A.H.; Andersen, T.O.; Bech, M.M. Design of full scale wave simulator for testing Power Take Off systems for wave energy converters. Int. J. Mar. Energy 2016, 13, 130–156. [Google Scholar] [CrossRef]
- Hansen, A.H.; Asmussen, M.F.; Bech, M.M. Model predictive control of a wave energy converter with discrete fluid power power take-off system. Energies 2018, 11, 635. [Google Scholar] [CrossRef] [Green Version]
- Hansen, R.H.; Kramer, M.M.; Vidal, E.; Hansen, R.H.; Kramer, M.M.; Vidal, E. Discrete displacement hydraulic power take-off system for the wavestar wave energy converter. Energies 2013, 6, 4001–4044. [Google Scholar] [CrossRef]
- Gaspar, J.F.; Calvário, M.; Kamarlouei, M.; Guedes Soares, C. Power take-off concept for wave energy converters based on oil-hydraulic transformer units. Renew. Energy 2016, 86, 1232–1246. [Google Scholar] [CrossRef]
- Jusoh, M.A.; Ibrahim, M.Z.; Daud, M.Z.; Yusop, Z.M.; Albani, A. An Estimation of Hydraulic Power Take-off Unit Parameters for Wave Energy Converter Device Using Non-Evolutionary NLPQL and Evolutionary GA Approaches. Energies 2020, 14, 79. [Google Scholar] [CrossRef]
- Gaspar, J.F.; Calvário, M.; Kamarlouei, M.; Soares, C.G. Design tradeoffs of an oil-hydraulic power take-off for wave energy converters. Renew. Energy 2018, 129, 245–259. [Google Scholar] [CrossRef]
- Othman, F.; Sadeghian, M.S.; Ebrahimi, F.; Heydari, M. A Study on Sedimentation in Sefidroud Dam by Using Depth Evaluation and Comparing the Results with USBR and FAO Methods. In Proceedings of the International Proceedings of Chemical, Biological and Environmental Engineering, Kuala Lumpur, Malaysia, 8–9 Jun 2013; Volume 51, p. 6. [CrossRef]
- Gaspar, J.F.; Kamarlouei, M.; Sinha, A.; Xu, H.; Calvário, M.; Faÿ, F.X.; Robles, E.; Soares, C.G. Speed control of oil-hydraulic power take-off system for oscillating body type wave energy converters. Renew. Energy 2016, 97, 769–783. [Google Scholar] [CrossRef]
- Liu, Z.; Qu, N.; Han, Z.; Zhang, J.; Zhang, S.; Li, M.; Shi, H. Study on energy conversion and storage system for a prototype buoys-array wave energy converter. Energy Sustain. Dev. 2016, 34, 100–110. [Google Scholar] [CrossRef]
- Do, H.T.; Dang, T.D.; Ahn, K.K. A multi-point-absorber wave-energy converter for the stabilization of output power. Ocean Eng. 2018, 161, 337–349. [Google Scholar] [CrossRef]
- Jusoh, M.A.; Yusop, Z.M.; Albani, A.; Daud, M.Z.; Ibrahim, M.Z. Investigations of hydraulic power take-off unit parameters effects on the performance of the wab-wecs in the different irregular sea states. J. Mar. Sci. Eng. 2021, 9, 897. [Google Scholar] [CrossRef]
- Liu, C.; Yang, Q.; Bao, G. Influence of hydraulic power take-off unit parameters on power capture ability of a two-raft-type wave energy converter. Ocean Eng. 2018, 150, 69–80. [Google Scholar] [CrossRef]
- Gao, H.; Xiao, J. Effects of power take-off parameters and harvester shape on wave energy extraction and output of a hydraulic conversion system. Appl. Energy 2021, 299, 117278. [Google Scholar] [CrossRef]
- Jusoh, M.A.; Ibrahim, M.Z.; Daud, M.Z.; Yusop, Z.M.; Albani, A.; Rahman, S.J.; Mohad, S. Parameters estimation of hydraulic power take-off system for wave energy conversion system using genetic algorithm. In Proceedings of the IOP Conference Series: Earth and Environmental Science, Bangkok, Thailand, 11–14 December 2019; Institute of Physics Publishing: Bristol, UK, 2020; Volume 463, p. 12129. [Google Scholar] [CrossRef]
- Cargo, C.J.; Plummer, A.R.; Hillis, A.J.; Schlotter, M. Determination of optimal parameters for a hydraulic power take-off unit of a wave energy converter in regular waves. Proc. Inst. Mech. Eng. Part J. Power Energy 2012, 226, 98–111. [Google Scholar] [CrossRef]
- Cargo, C.J.; Hillis, A.J.; Plummer, A.R. Optimisation and control of a hydraulic power take-off unit for a wave energy converter in irregular waves. Proc. Inst. Mech. Eng. Part J. Power Energy 2014, 228, 462–479. [Google Scholar] [CrossRef] [Green Version]
- Cargo, C.J.; Hillis, A.J.; Plummer, A.R. Strategies for active tuning of Wave Energy Converter hydraulic power take-off mechanisms. Renew. Energy 2016, 94, 32–47. [Google Scholar] [CrossRef] [Green Version]
- Sun, P.; Li, Q.; He, H.; Chen, H.; Zhang, J.; Li, H.; Liu, D. Design and optimization investigation on hydraulic transmission and energy storage system for a floating-array-buoys wave energy converter. Energy Convers. Manag. 2021, 235, 113998. [Google Scholar] [CrossRef]
- Wang, D.; Lu, K. Design optimization of hydraulic energy storage and conversion system for wave energy converters. Prot. Control Mod. Power Syst. 2018, 3, 7. [Google Scholar] [CrossRef]
- Chen, Q.; Yue, X.; Geng, D.; Yan, D.; Jiang, W. Integrated characteristic curves of the constant-pressure hydraulic power take-off in wave energy conversion. Int. J. Electr. Power Energy Syst. 2020, 117, 105730. [Google Scholar] [CrossRef]
- Calvário, M.; Gaspar, J.F.; Kamarlouei, M.; Hallak, T.S.; Guedes Soares, C. Oil-hydraulic power take-off concept for an oscillating wave surge converter. Renew. Energy 2020, 159, 1297–1309. [Google Scholar] [CrossRef]
- Jusoh, M.A.; Daud, M.Z. Control strategy of a grid-connected photovoltaic with battery energy storage system for hourly power dispatch. Int. J. Power Electron. Drive Syst. 2017, 8, 1830–1840. [Google Scholar] [CrossRef]
- Jusoh, M.A.; Daud, M.Z. Particle swarm optimisation-based optimal photovoltaic system of hourly output power dispatch using Lithium-ion batteries. J. Mech. Eng. Sci. 2017, 11, 2780–2793. [Google Scholar] [CrossRef]
- Fan, Y.; Mu, A.; Ma, T. Design and control of a point absorber wave energy converter with an open loop hydraulic transmission. Energy Convers. Manag. 2016, 121, 13–21. [Google Scholar] [CrossRef]
- Wang, K.; Sheng, S.; Zhang, Y.; Ye, Y.; Jiang, J.; Lin, H.; Huang, Z.; Wang, Z.; You, Y. Principle and control strategy of pulse width modulation rectifier for hydraulic power generation system. Renew. Energy 2019, 135, 1200–1206. [Google Scholar] [CrossRef]
- Ricci, P.; Lopez, J.; Santos, M.; Ruiz-Minguela, P.; Villate, J.L.; Salcedo, F.; Falcão, A.; Falcão, A.F. Control strategies for a wave energy converter connected to a hydraulic power take-off. IET Renew. Power Gener. 2011, 5, 234. [Google Scholar] [CrossRef]
- Jianan, X.; Tao, X. MPPT Control of Hydraulic Power Take-Off for Wave Energy Converter on Artificial Breakwater. J. Mar. Sci. Eng. 2019, 8, 304. [Google Scholar] [CrossRef]
- Zou, S.; Abdelkhalik, O. Control of Wave Energy Converters with Discrete Displacement Hydraulic Power Take-Off Units. J. Mar. Sci. Eng. 2018, 6, 31. [Google Scholar] [CrossRef] [Green Version]
- Song, R.; Dai, Y.M.; Qian, X. Intermittent wave energy generation system with hydraulic energy storage and pressure control for stable power output. J. Mar. Sci. Technol. 2018, 23, 802–813. [Google Scholar] [CrossRef] [Green Version]
- Gaspar, J.F.; Kamarlouei, M.; Sinha, A.; Xu, H.; Calvário, M.; Faÿ, F.X.; Robles, E.; Guedes Soares, C. Analysis of electrical drive speed control limitations of a power take-off system for wave energy converters. Renew. Energy 2017, 113, 335–346. [Google Scholar] [CrossRef]
- Truong, D.Q.; Ahn, K.K. Development of a novel point absorber in heave for wave energy conversion. Renew. Energy 2014, 65, 183–191. [Google Scholar] [CrossRef]
- Shadman, M.; Estefen, S.F.; Rodriguez, C.A.; Nogueira, I.C. A geometrical optimization method applied to a heaving point absorber wave energy converter. Renew. Energy 2018, 115, 533–546. [Google Scholar] [CrossRef]
- Coiro, D.P.; Troise, G.; Calise, G.; Bizzarrini, N. Wave energy conversion through a point pivoted absorber: Numerical and experimental tests on a scaled model. Renew. Energy 2016, 87, 317–325. [Google Scholar] [CrossRef]
- Chen, Z.; Zhou, B.; Zhang, L.; Sun, L.; Zhang, X. Performance evaluation of a dual resonance wave-energy convertor in irregular waves. Appl. Ocean Res. 2018, 77, 78–88. [Google Scholar] [CrossRef]
- Mathworks. Hydraulics (Isothermal) Library—MATLAB & Simulink. Available online: https://www.mathworks.com/help/physmod/hydro/hydraulics-modeling.html (accessed on 2 December 2021).











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sea State | Remarks | ||
|---|---|---|---|
| A | 0.8 | 4.5 | Nominal & |
| B | 0.6 | 4.5 | Lower |
| C | 1.0 | Larger | |
| D | 0.8 | 2.5 | Lower |
| E | 6.5 | Larger |
| Descriptions | Value | Unit |
|---|---|---|
| Actuation module | ||
| Piston diameter | 0.035 | m |
| Rod diameter | 0.022 | m |
| Stroke length | 0.3 | m |
| Initial displacement of piston | 0.15 | m |
| Rectification module | ||
| Flow discharge coefficient | 0.75 | - |
| Maximum cross-sectional area | 0.003 | m2 |
| Fluid energy storage module | ||
| HPA1 & HPA2 pre-charge pressure | 47 | bar |
| LPA pre-charge pressure | 3.2 | bar |
| HPA1 & HPA2 volume capacity | 2.8 | L |
| LPA volume capacity | 4 | L |
| Adiabatic index | 1.4 | - |
| Generation module | ||
| Rated power of generator | 100 | W |
| Rated speed of generator | 200 | rpm |
| Rated torque of generator | 6 | Nm |
| Damping coefficient of generator | 0.024 | Nm/rpm |
| Efficiency of the generator | 0.95 | - |
| Volumetric displacement of hydraulic motor | 8 | cc/rev |
| Volumetric efficiency of hydraulic motor | 0.95 | - |
| Mechanical efficiency of hydraulic motor | 0.95 | - |
| Fluid energy control module * | ||
| Flow discharge coefficient of DCV1, DCV2 & FCV | 0.7 | - |
| Leakage area of DCV1, DCV2 & FCV | 1 × 10 | m2 |
| Maximum opening area of DCV1 & DCV2 & FCV | 0.5 × 10 | m2 |
| Descriptions | Value | |
|---|---|---|
| Genetic algorithm setting | ||
| Population size | 100 | |
| Reproduction ratio (%) | 80 | |
| Maximum number of generations | 20 | |
| Mutation probability (%) | 10 | |
| Mutation amplitude | 0.2 | |
| Seed | 1 | |
| Final accuracy | 0.01 | |
| Parameters constraints | Min | Max |
| 0.01 | 1 | |
| 0.01 | 1 | |
| 0.01 | 1 | |
| 47 | 52 | |
| Descriptions | Unit | P | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| 47.5 | 48.0 | 48.5 | 49.0 | 49.5 | 50.0 | 50.5 | 51.0 | 51.5 | ||
| OP | ||||||||||
| 100 W | % | 21.96 | 24.75 | 25.95 | 26.95 | 28.14 | 28.14 | 29.54 | 30.54 | 29.94 |
| 90 W | 3.79 | 2.59 | 2.00 | 1.40 | 0.60 | 1.20 | 0.80 | 1.00 | 1.00 | |
| 80 W | 2.40 | 1.00 | 0.60 | 0.40 | 0.40 | 0.40 | 1.00 | 0.60 | 0.40 | |
| 70 W | 0.40 | 0.80 | 0.40 | 0.40 | 0.60 | 0.20 | 0.40 | 0.00 | 0.00 | |
| 60 W | 1.60 | 0.60 | 0.40 | 0.40 | 0.40 | 0.00 | 0.20 | 0.00 | 0.40 | |
| 50 W | 1.20 | 0.20 | 0.40 | 0.40 | 0.20 | 0.80 | 0.00 | 0.20 | 0.00 | |
| 40 W | 0.60 | 0.00 | 0.00 | 0.20 | 0.20 | 0.20 | 0.00 | 0.20 | 0.20 | |
| 30 W | 0.60 | 0.20 | 0.20 | 0.00 | 0.40 | 0.20 | 0.20 | 0.00 | 0.20 | |
| 20 W | 0.60 | 0.20 | 0.00 | 0.40 | 0.40 | 0.20 | 0.40 | 0.20 | 0.20 | |
| 10 W | 22.16 | 18.36 | 12.38 | 10.38 | 7.98 | 8.18 | 6.99 | 6.39 | 7.98 | |
| 0 W | 44.71 | 51.30 | 57.68 | 59.08 | 60.68 | 60.48 | 60.48 | 60.88 | 59.68 | |
| −10 W | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | |
| −20 W | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | |
| Final value | W | 30.9986 | 30.2751 | 30.3207 | 30.4898 | 31.1239 | 31.6452 | 32.2186 | 32.4980 | 32.7173 |
| Slope coefficient | - | 0.05915 | 0.05672 | 0.05601 | 0.05613 | 0.05637 | 0.05710 | 0.05751 | 0.05792 | 0.05855 |
| y-axis intercept point | W | 1.74041 | 2.24836 | 2.59752 | 2.85415 | 3.29133 | 3.60071 | 4.30470 | 4.55947 | 4.80109 |
| P | ||||||||||
| Final value | W | 69.0355 | 69.7628 | 69.7719 | 69.6776 | 69.0286 | 68.5179 | 67.9496 | 67.6495 | 67.4428 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jusoh, M.A.; Yusop, Z.M.; Albani, A.; Daud, M.Z.; Ibrahim, M.Z. An Improved Hydraulic Power Take-Off Unit Based on Dual Fluid Energy Storage for Reducing the Power Fluctuation Problem in the Wave Energy Conversion System. J. Mar. Sci. Eng. 2022, 10, 1160. https://doi.org/10.3390/jmse10081160
Jusoh MA, Yusop ZM, Albani A, Daud MZ, Ibrahim MZ. An Improved Hydraulic Power Take-Off Unit Based on Dual Fluid Energy Storage for Reducing the Power Fluctuation Problem in the Wave Energy Conversion System. Journal of Marine Science and Engineering. 2022; 10(8):1160. https://doi.org/10.3390/jmse10081160
Chicago/Turabian StyleJusoh, Mohd Afifi, Zulkifli Mohd Yusop, Aliashim Albani, Muhamad Zalani Daud, and Mohd Zamri Ibrahim. 2022. "An Improved Hydraulic Power Take-Off Unit Based on Dual Fluid Energy Storage for Reducing the Power Fluctuation Problem in the Wave Energy Conversion System" Journal of Marine Science and Engineering 10, no. 8: 1160. https://doi.org/10.3390/jmse10081160
APA StyleJusoh, M. A., Yusop, Z. M., Albani, A., Daud, M. Z., & Ibrahim, M. Z. (2022). An Improved Hydraulic Power Take-Off Unit Based on Dual Fluid Energy Storage for Reducing the Power Fluctuation Problem in the Wave Energy Conversion System. Journal of Marine Science and Engineering, 10(8), 1160. https://doi.org/10.3390/jmse10081160