
The Contribution of the Vendée Globe Race to Improved Ocean Surface Information: A Validation of the Remotely Sensed Salinity in the Sub-Antarctic Zone

 ,
,  , and
, and {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Data and Methods
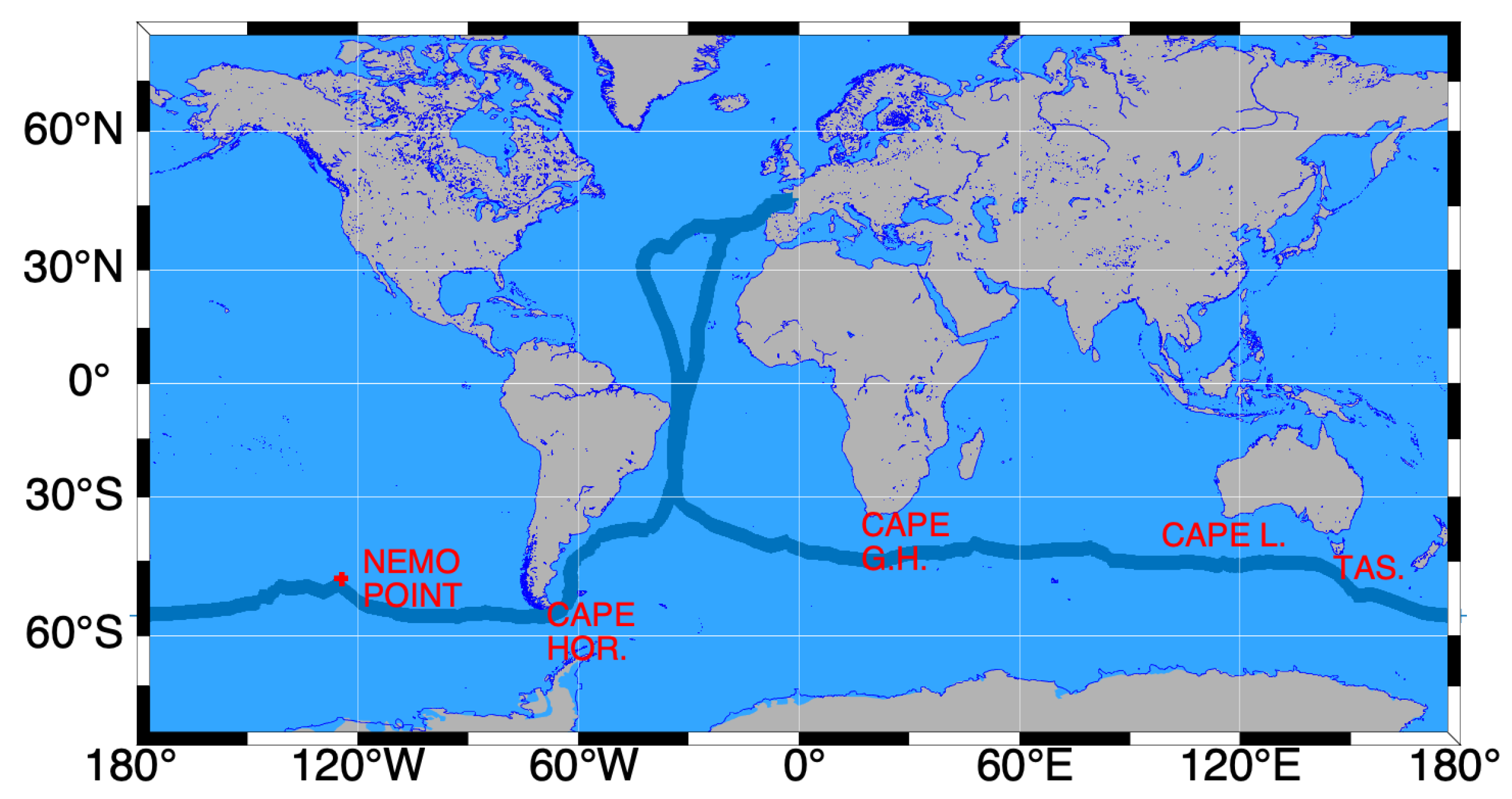
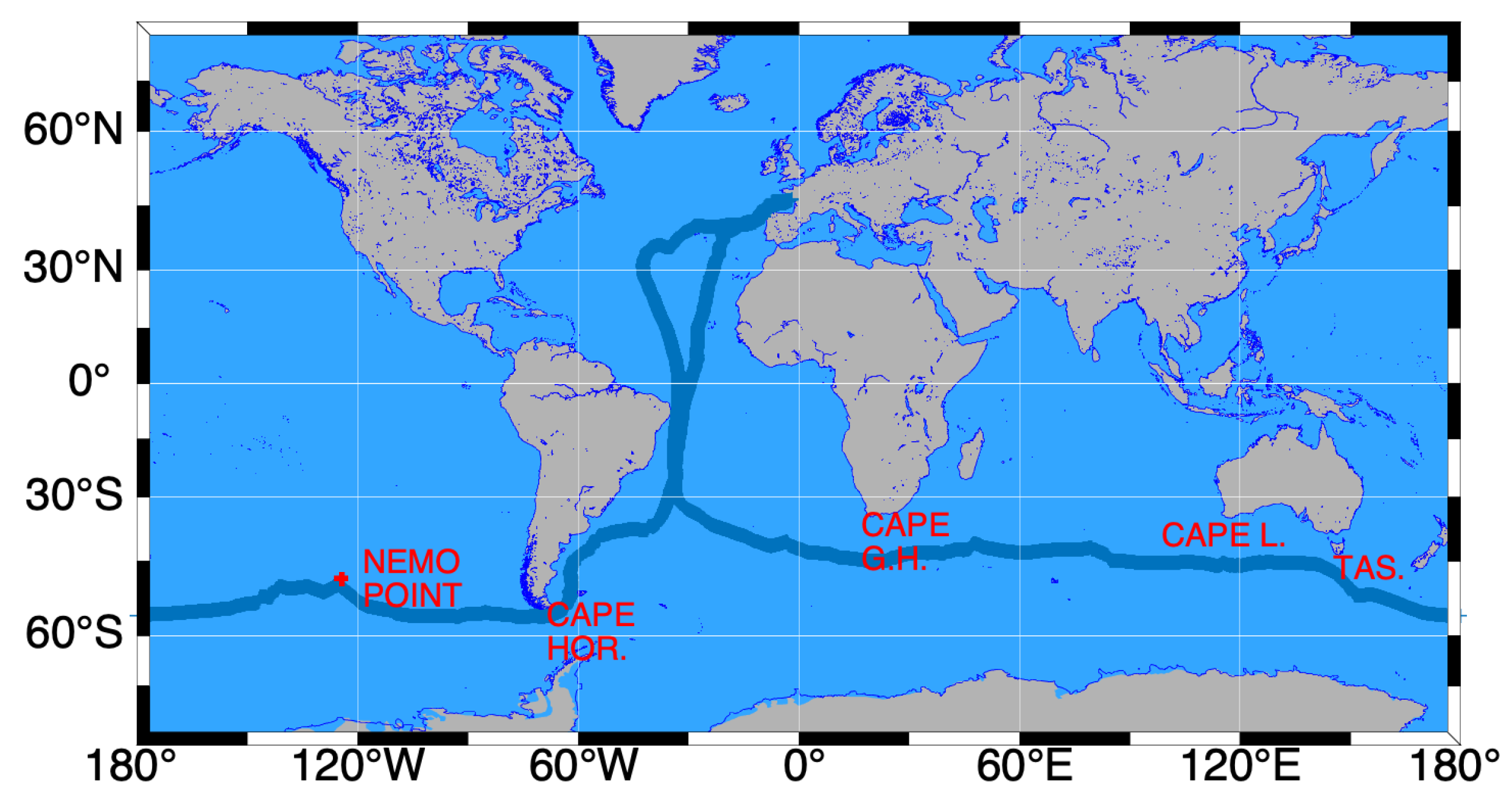
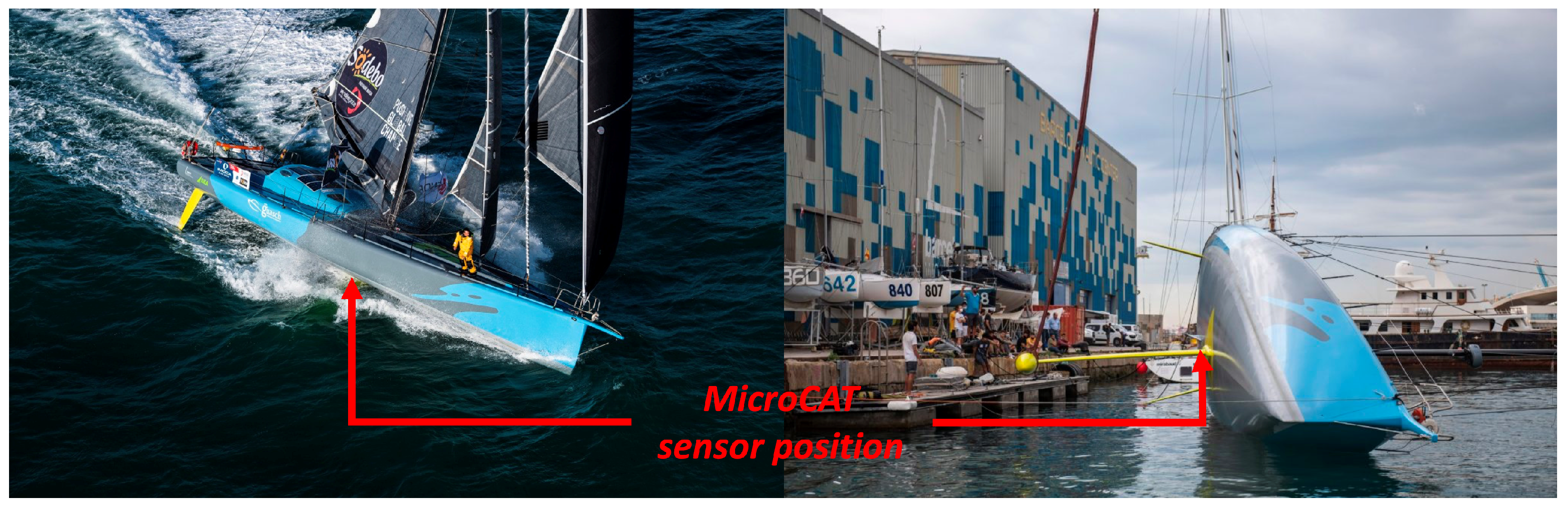
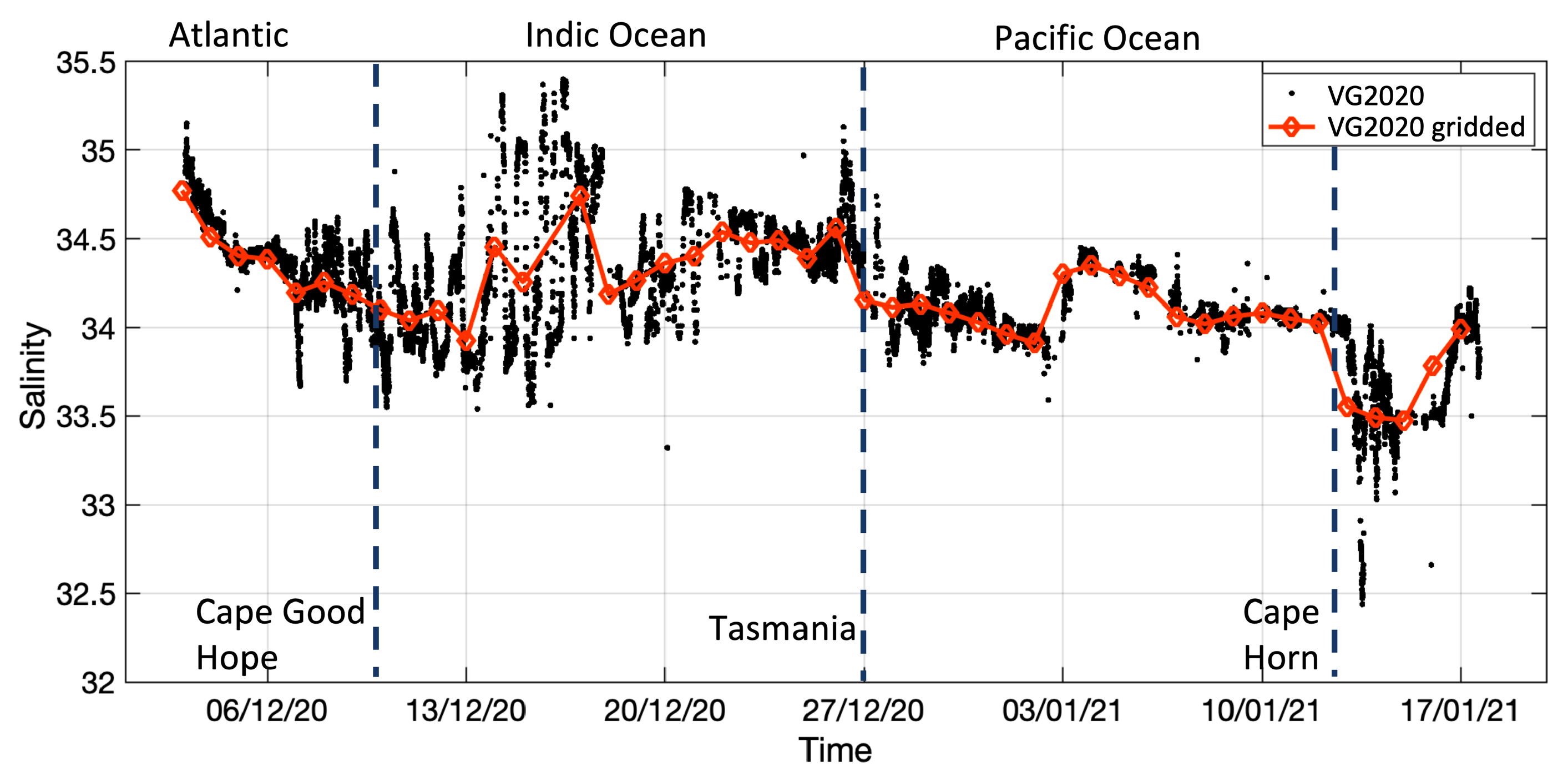
2.1. Vendée Globe In-Situ Data
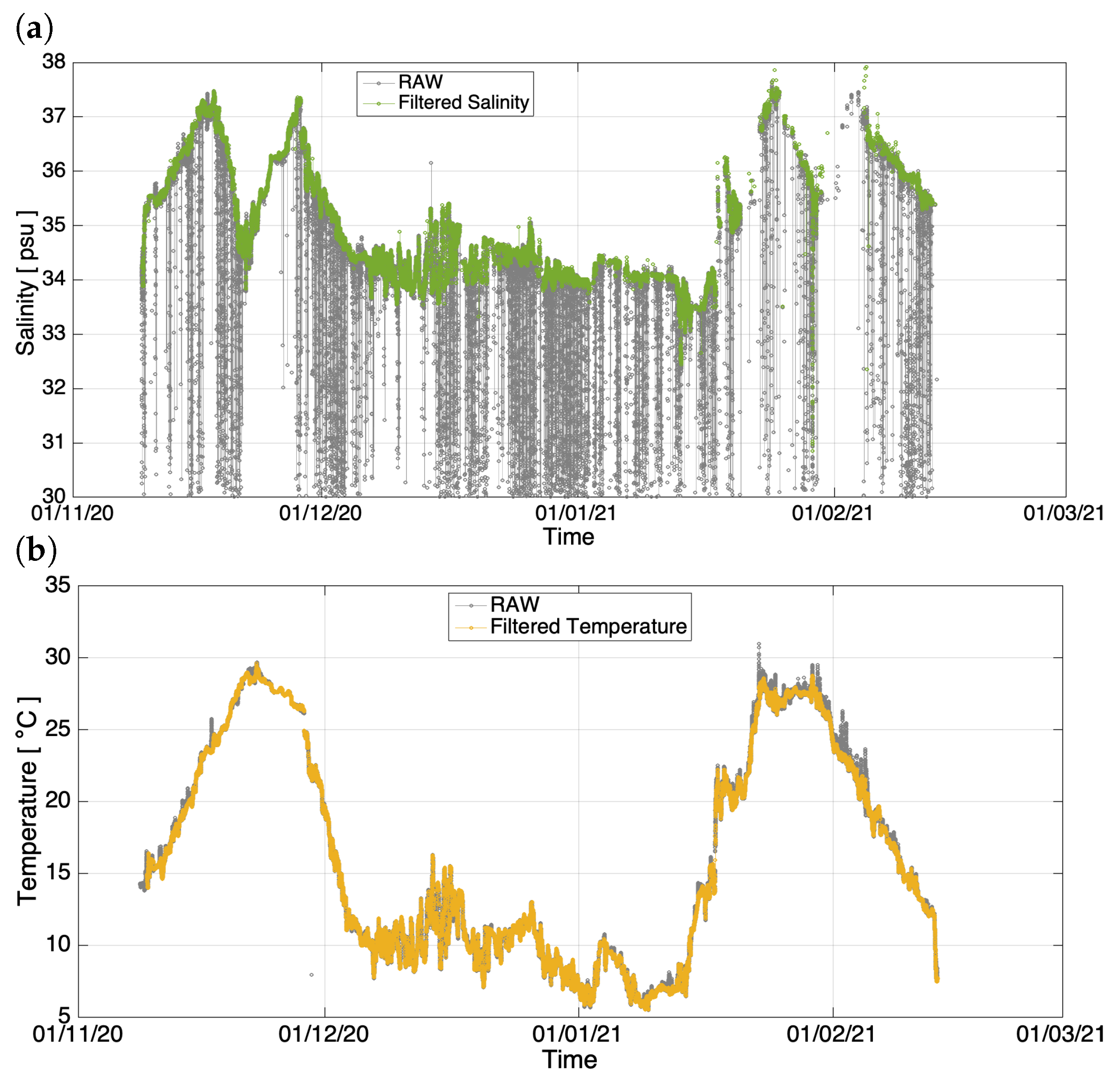
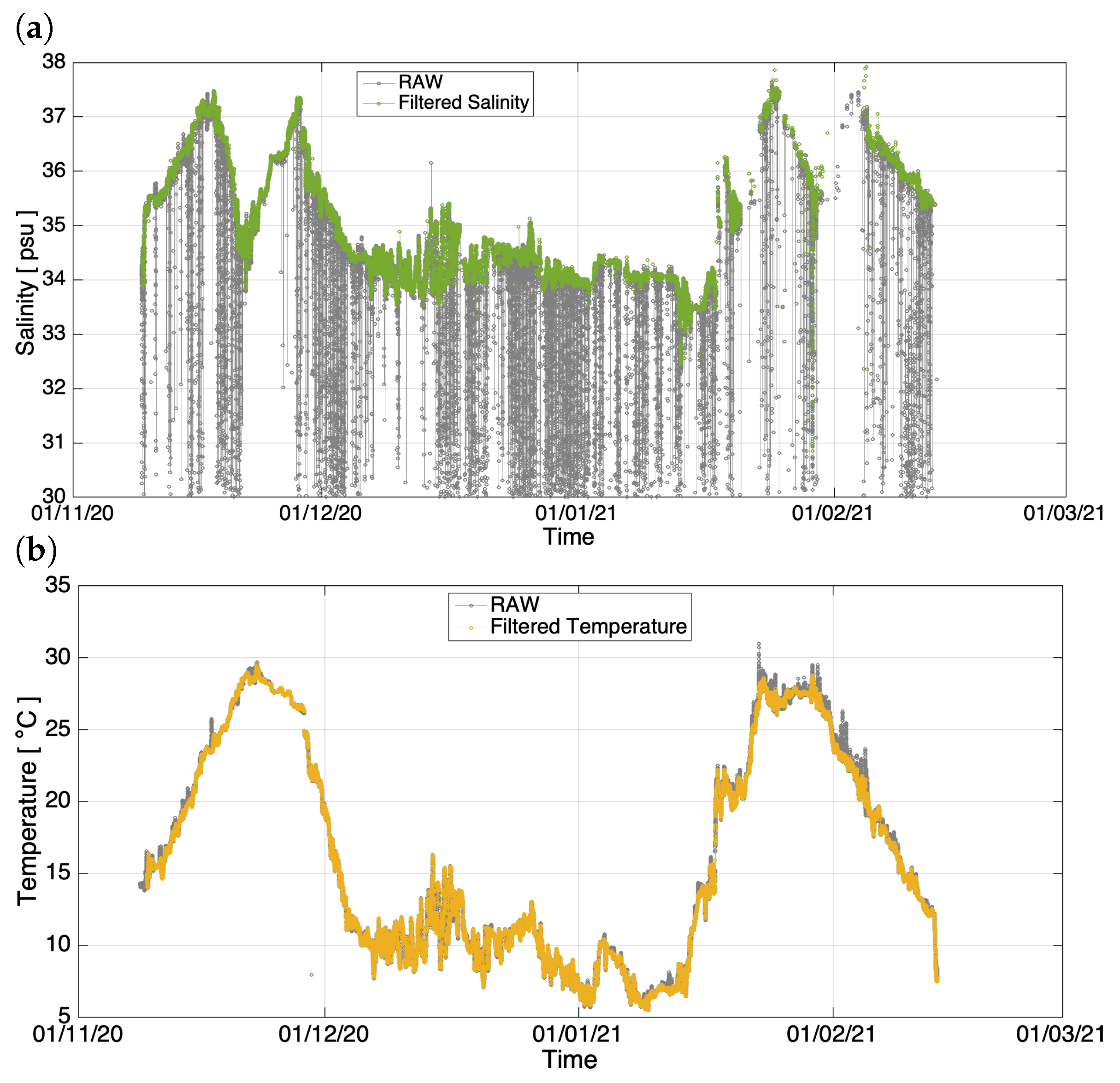
2.2. Vendée Globe Data Filtering Process
- Checking that temperature and salinity are within a geophysical values range. Temperature is filtered out when there are values outside the range of (0–35 °C), and conductivity when the resulting salinity lies outside the range of (30–40 psu). These filtered measurements include records obtained when sensor box was outside the water;
- The temperature measurement is flagged when (a) there are short spikes denoting that the water might be stagnant, (b) when there are significant differences from the surrounding values and in the absence of strong temperature gradients.
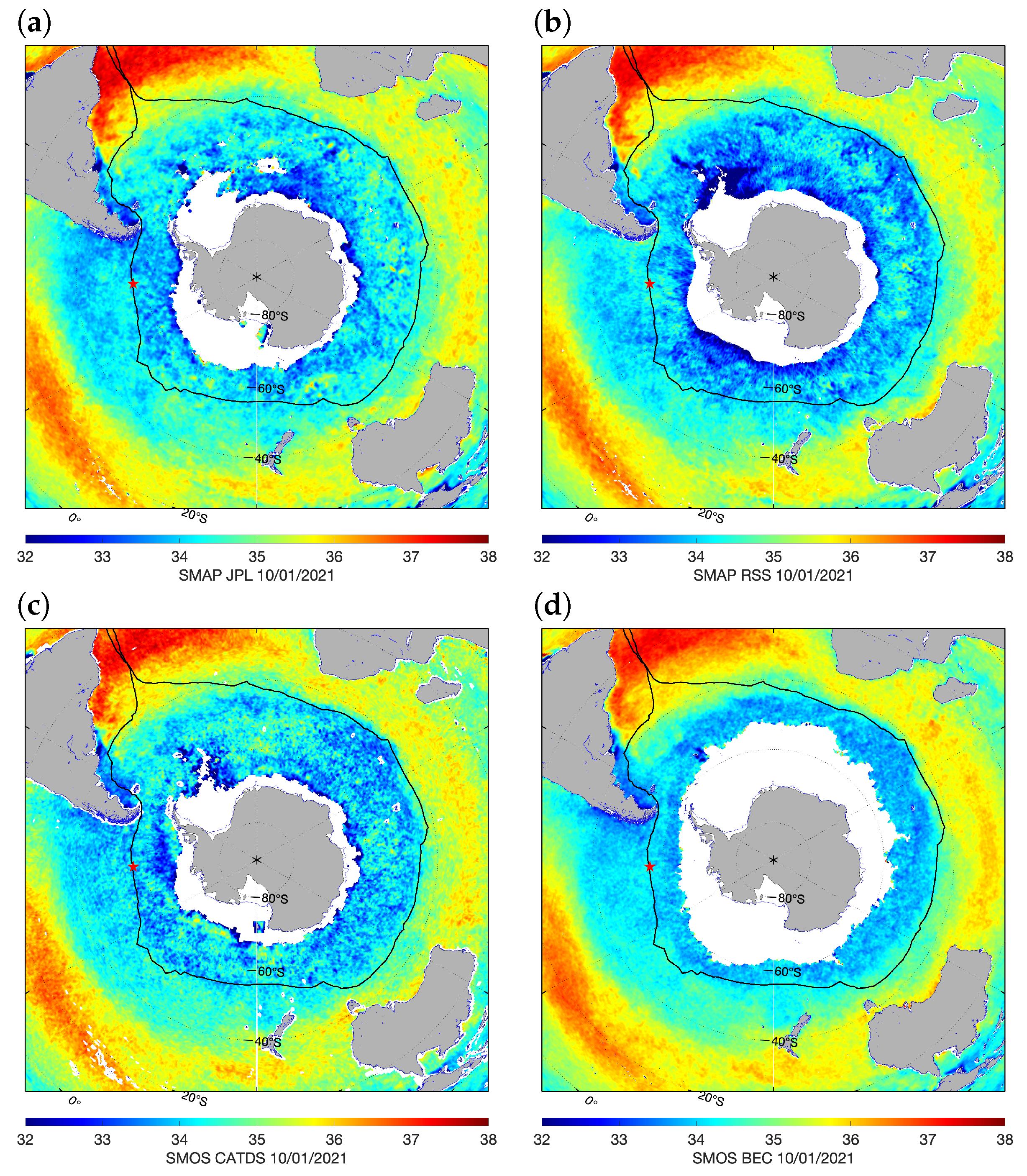
2.3. Remotely Sensed SSS Products
3. Results and Discussion
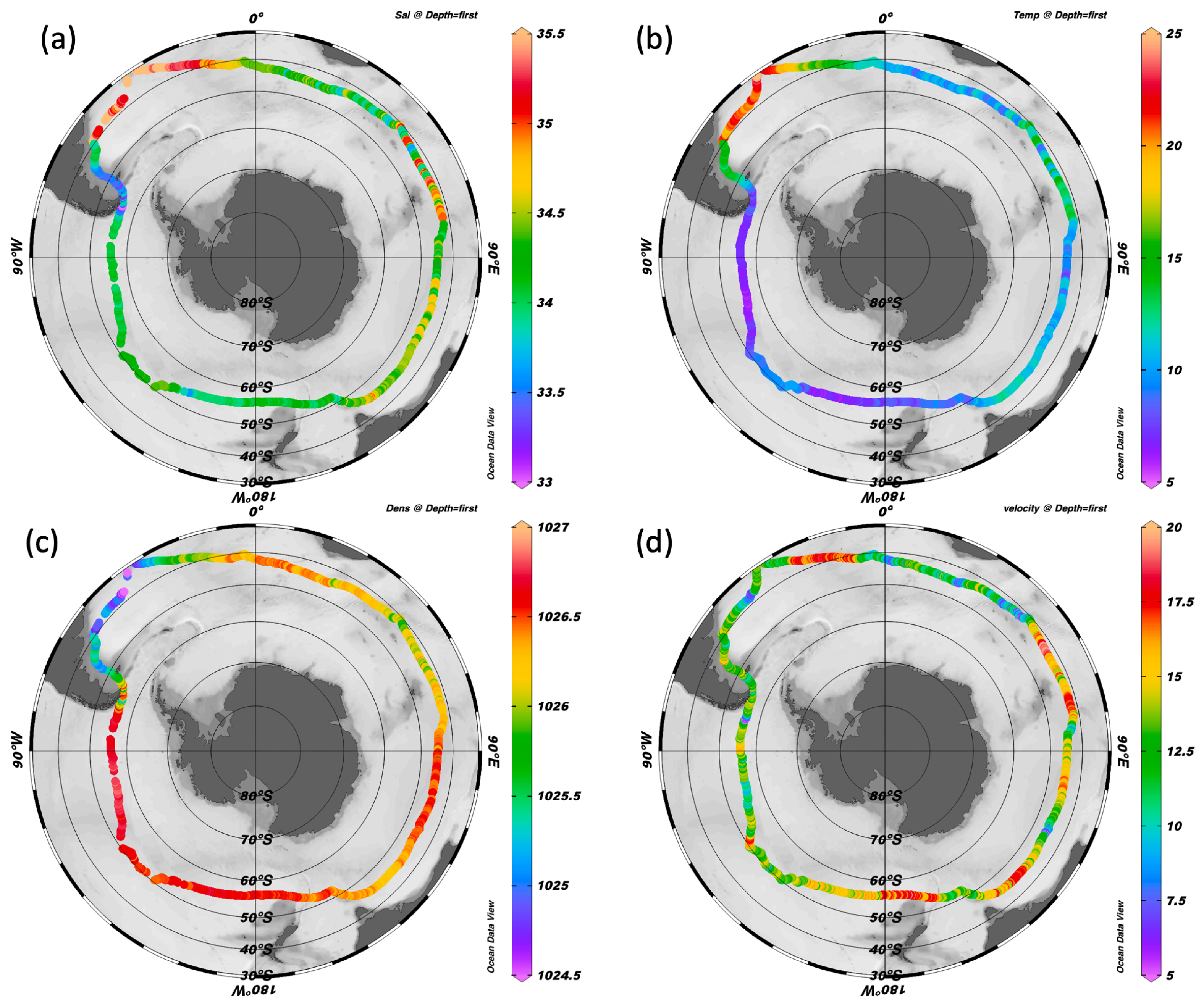
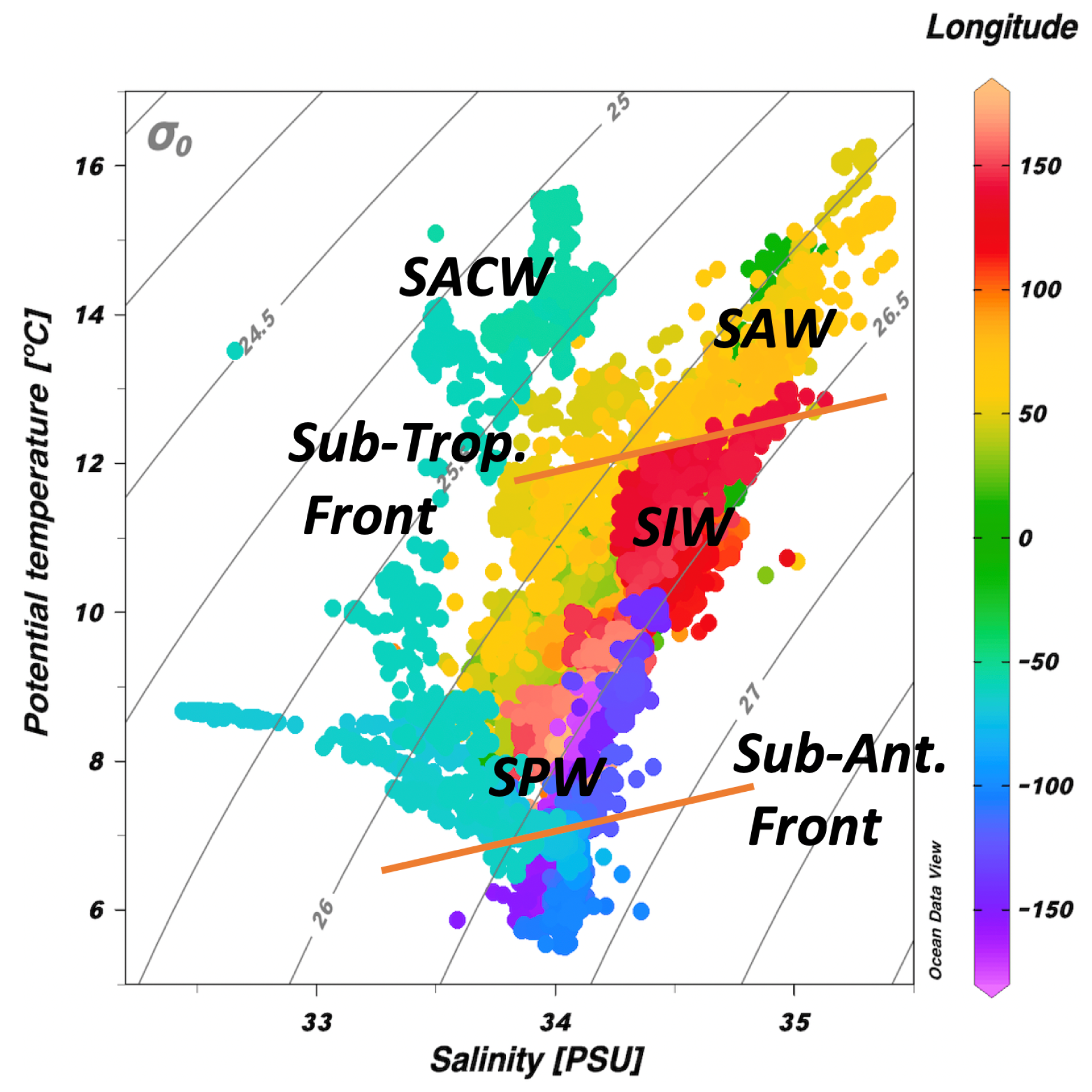
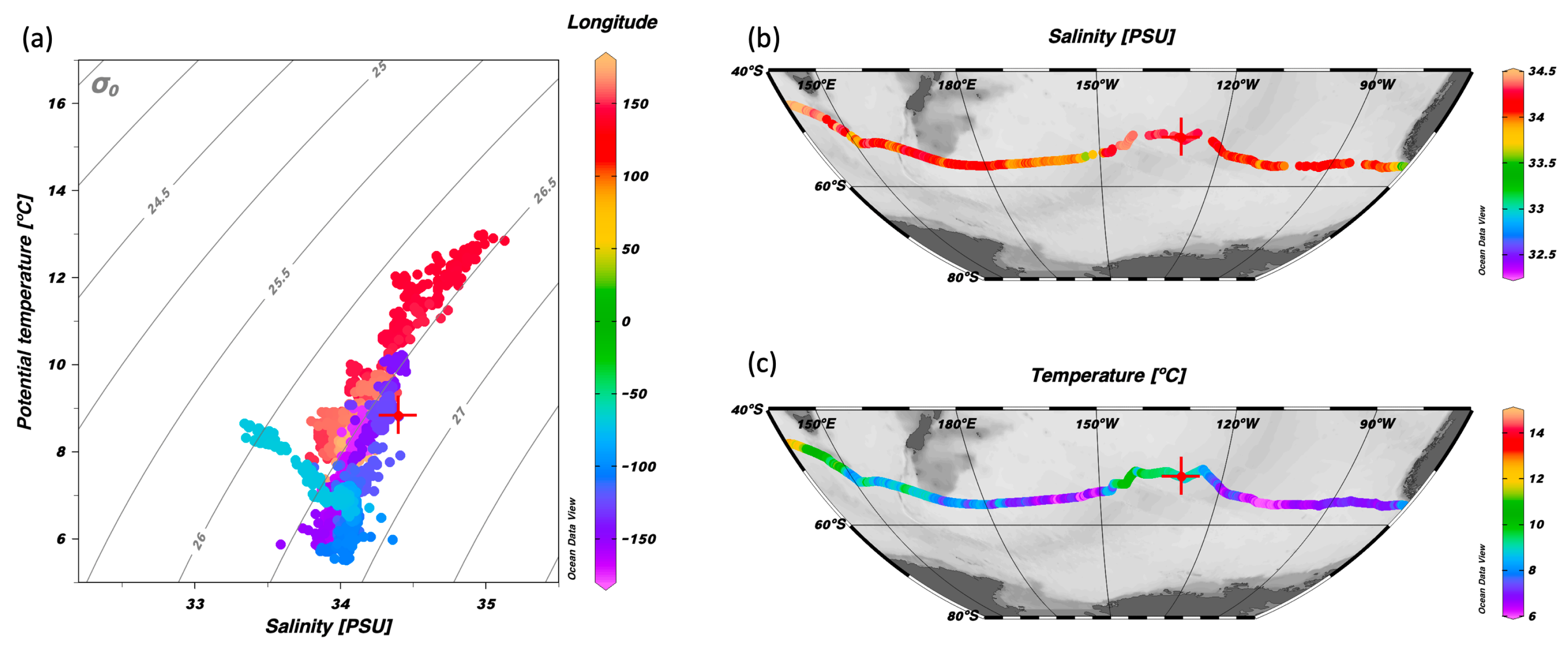
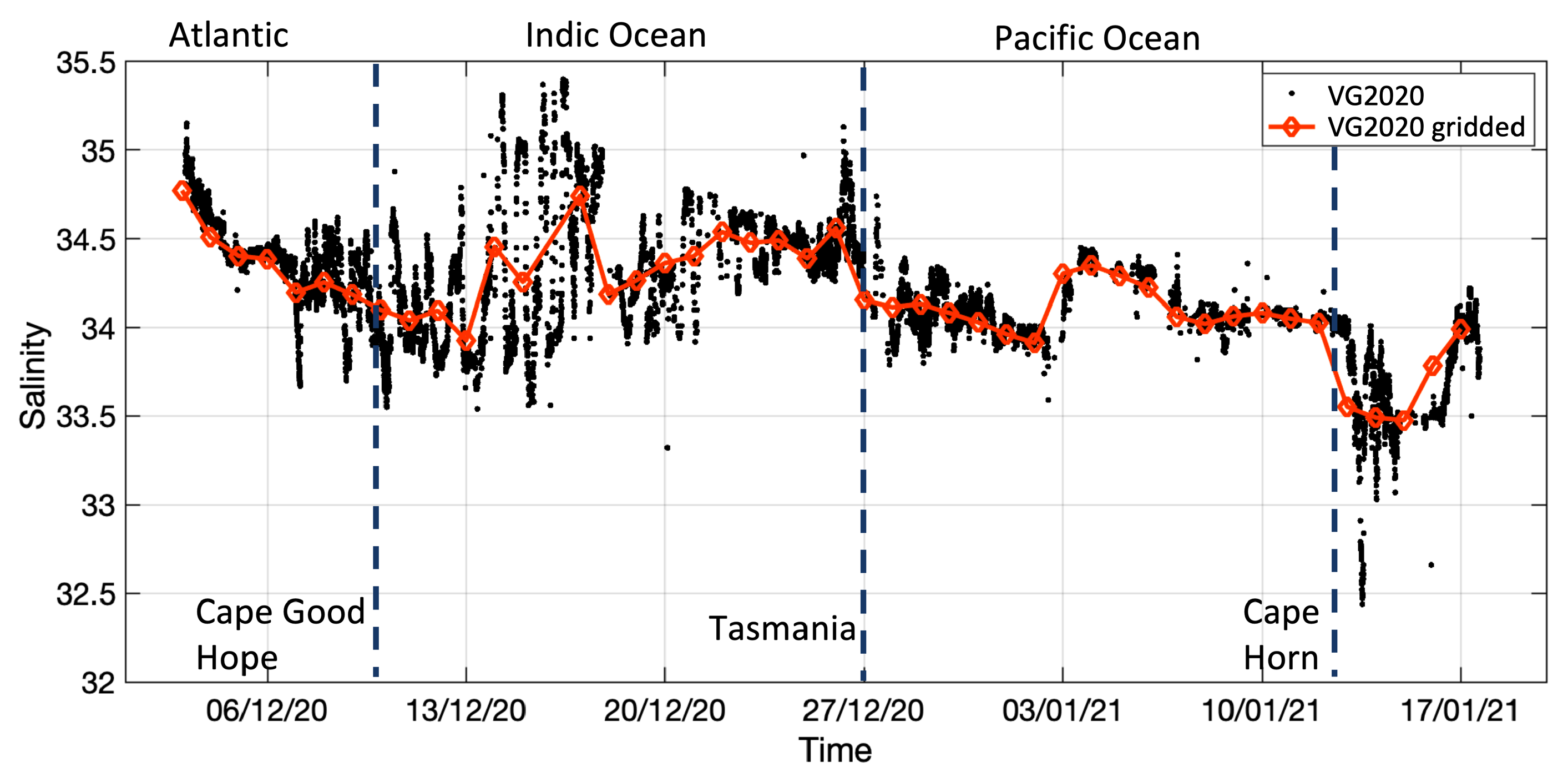
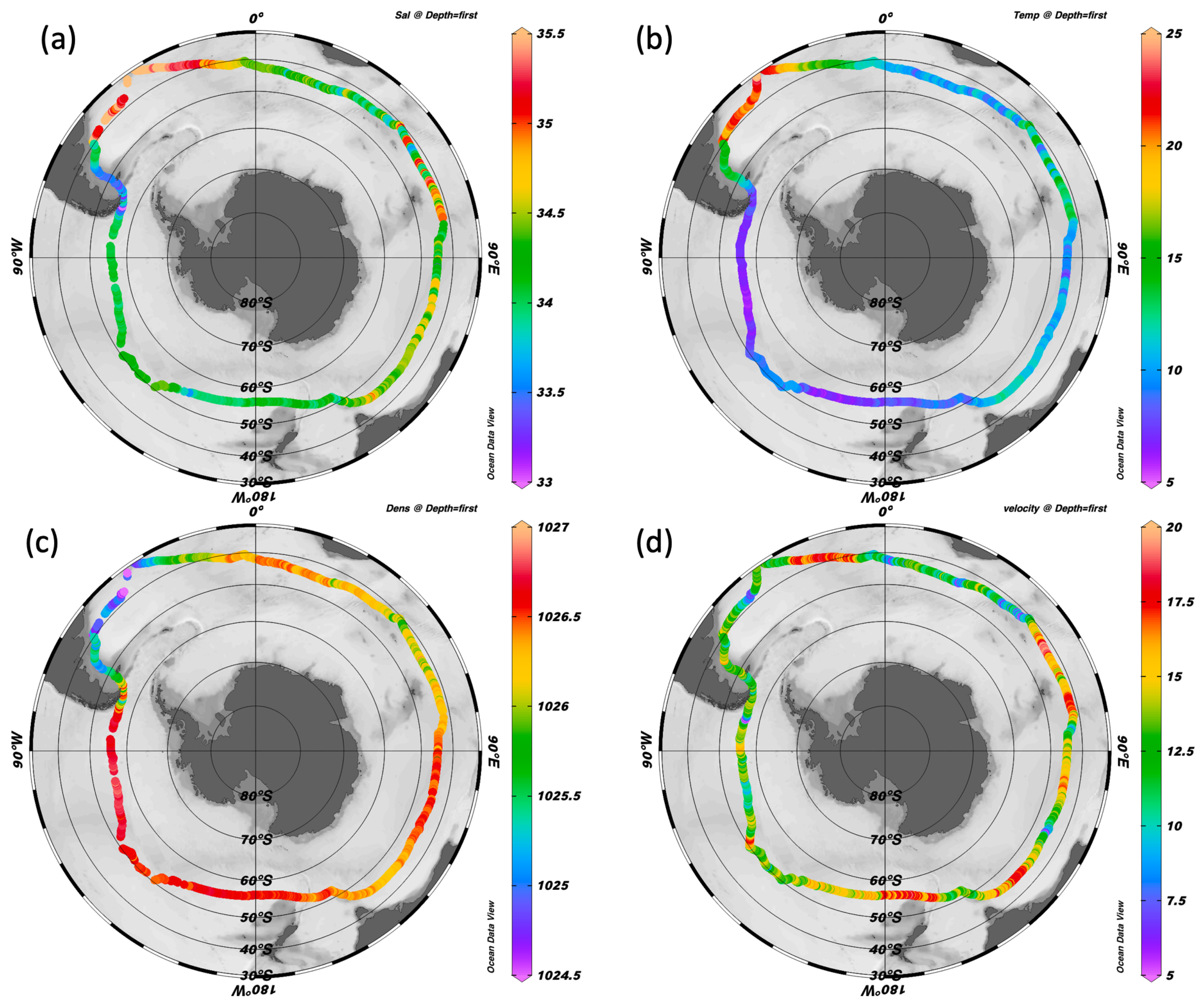
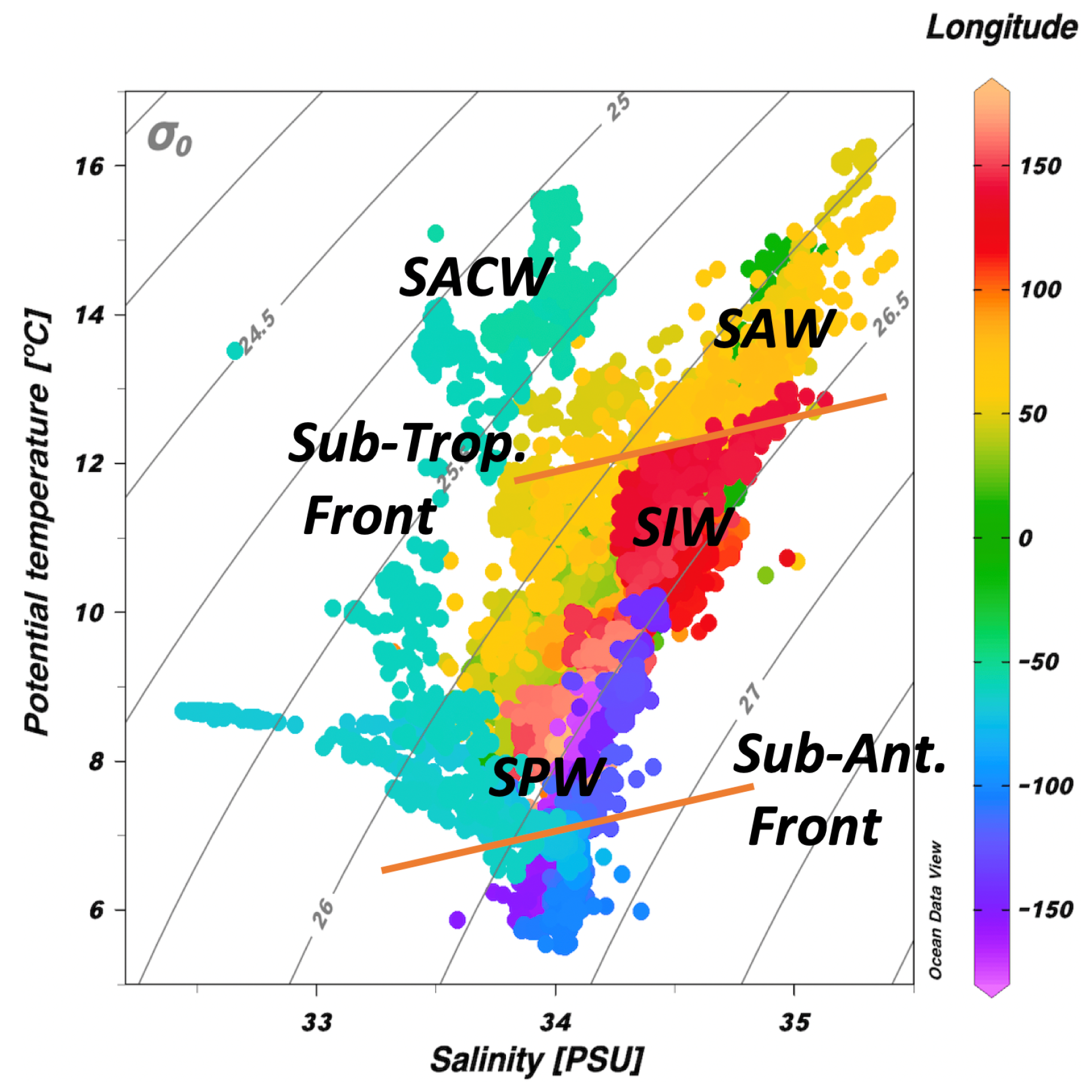
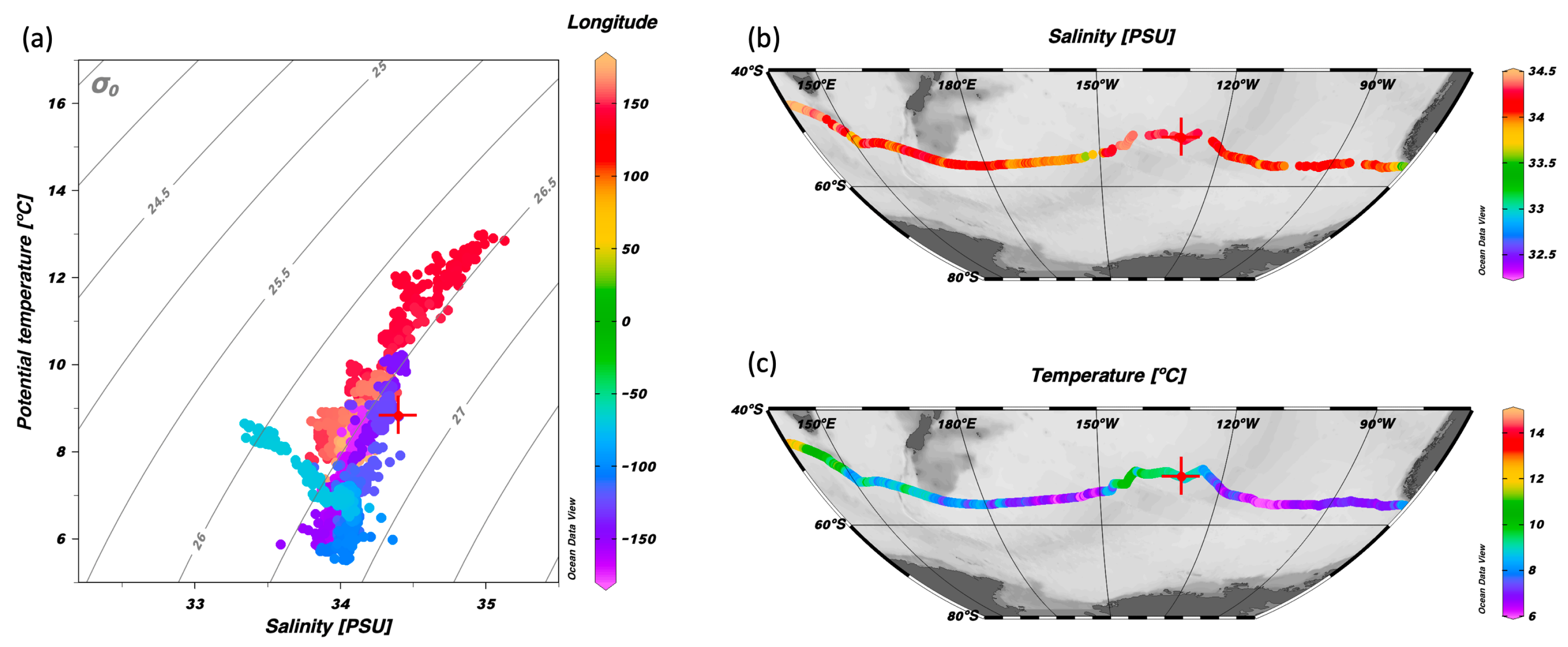
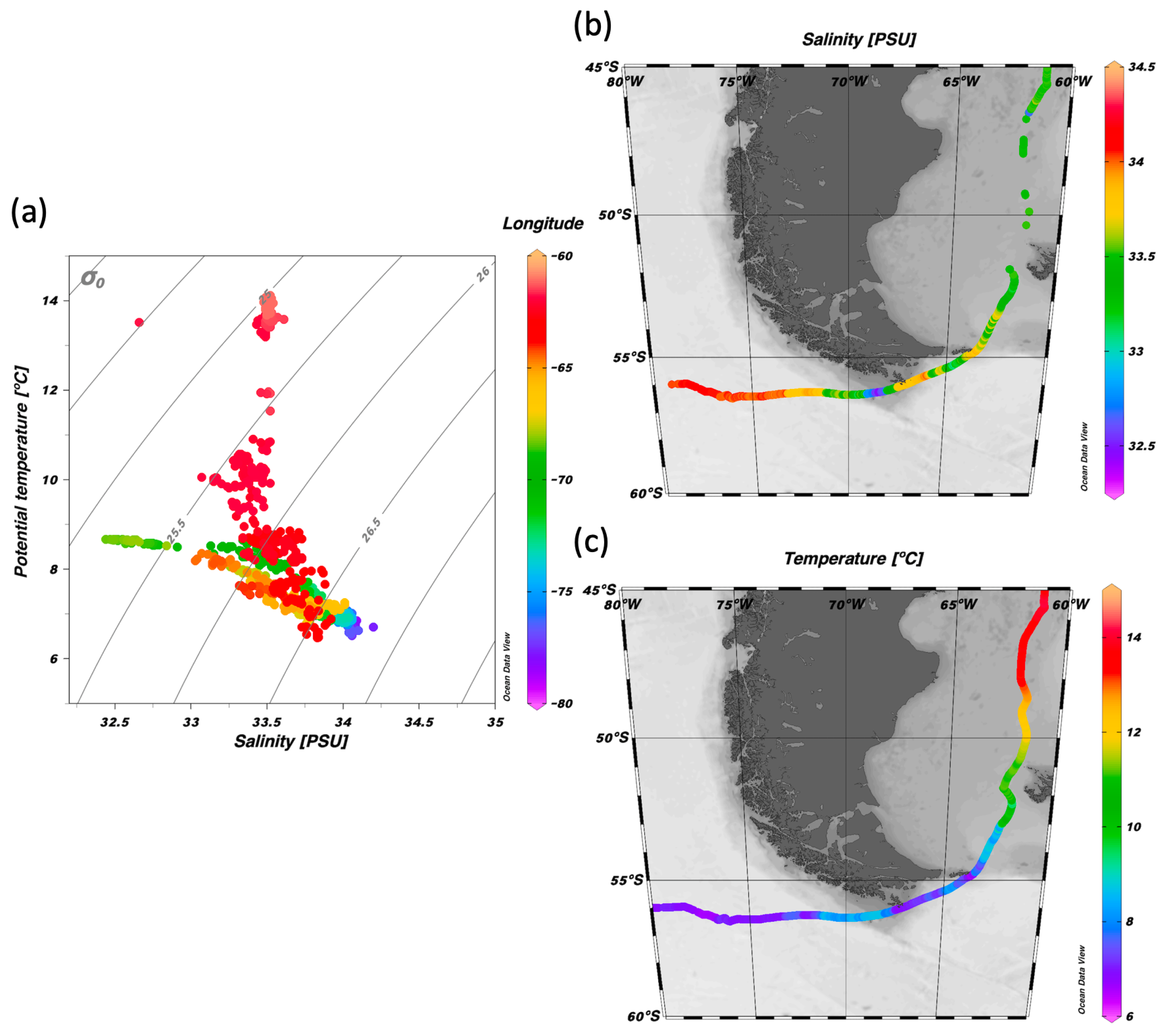
3.1. In-Situ Data Results in the Sub-Antarctic Zone
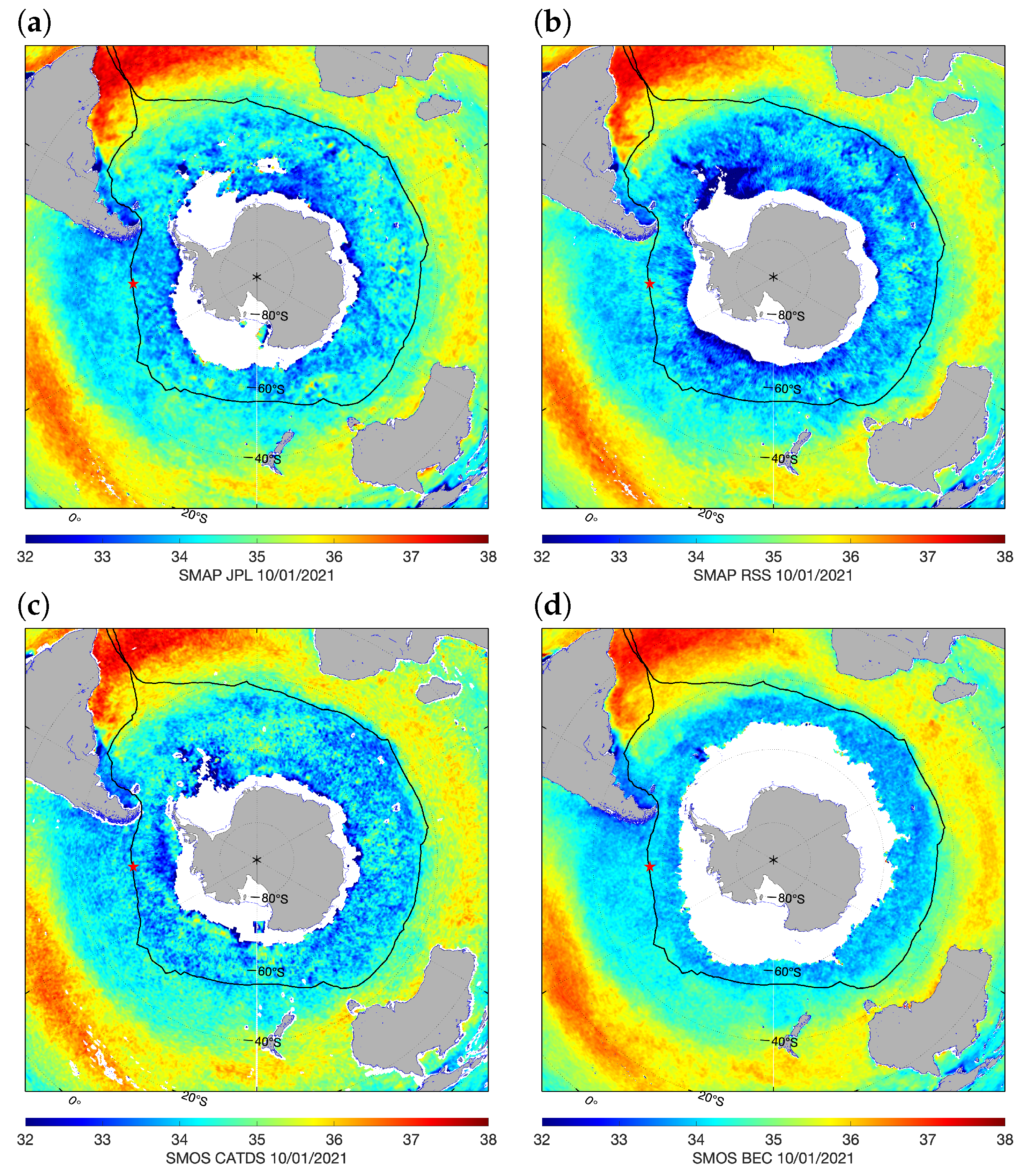
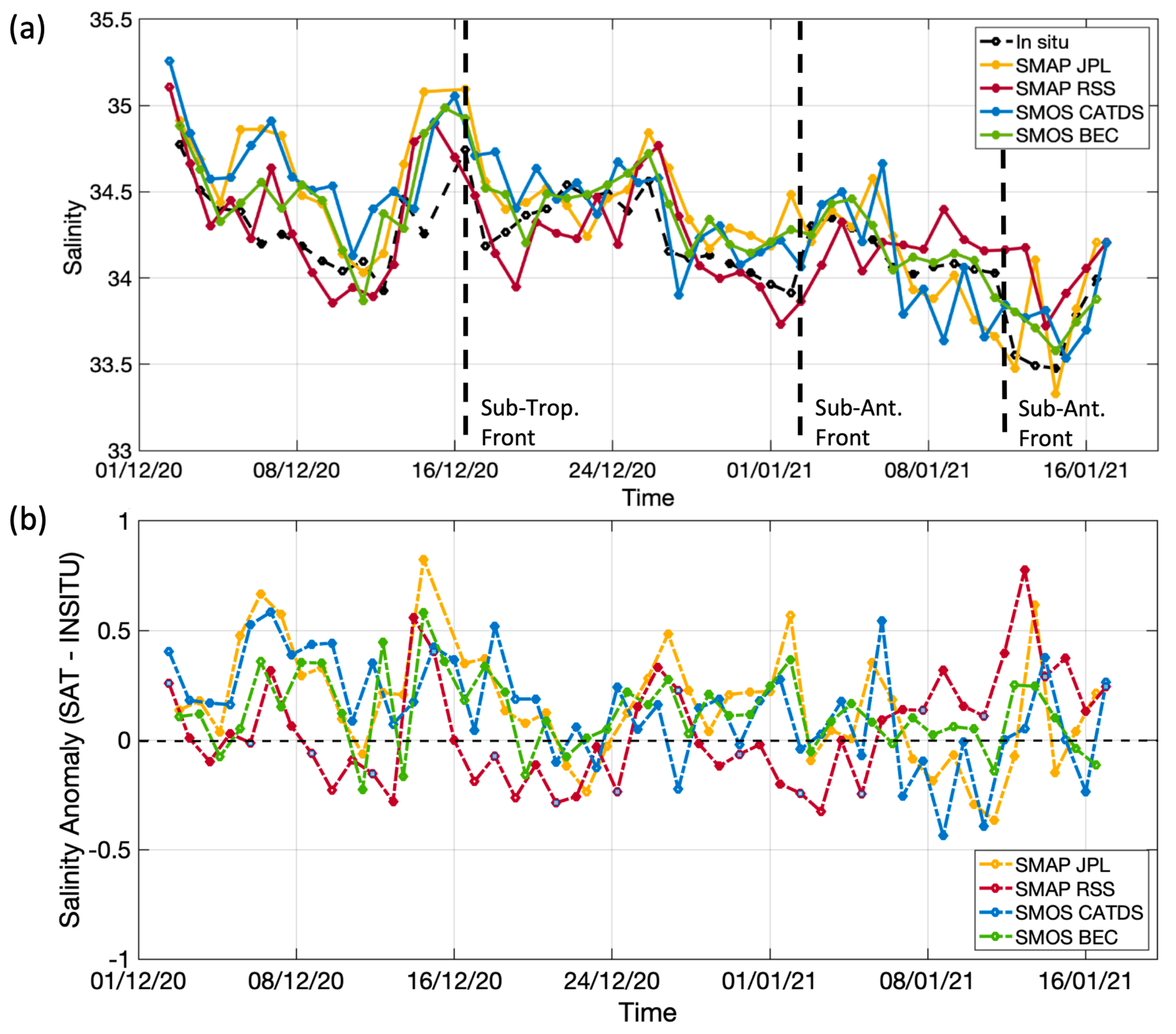
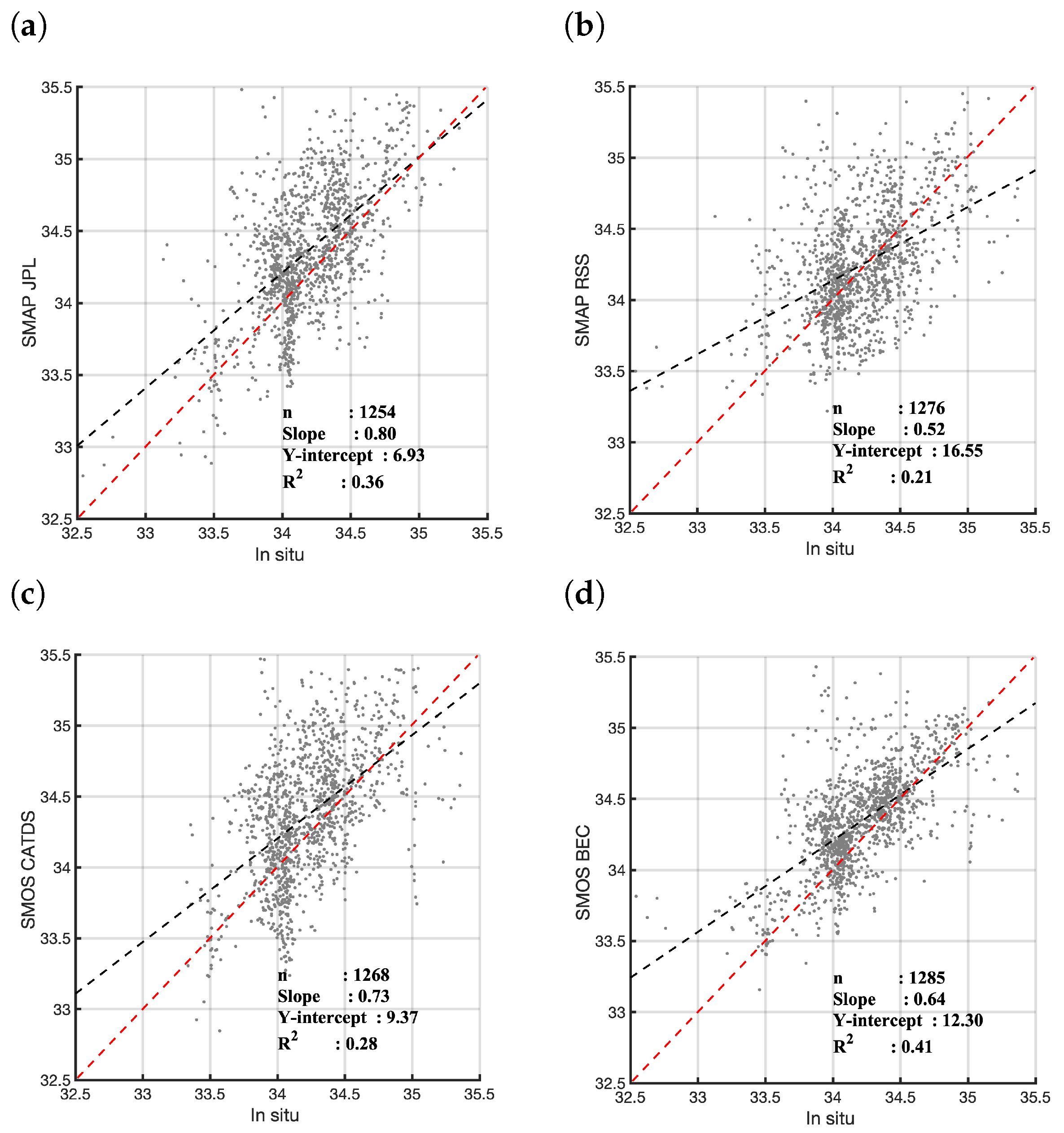
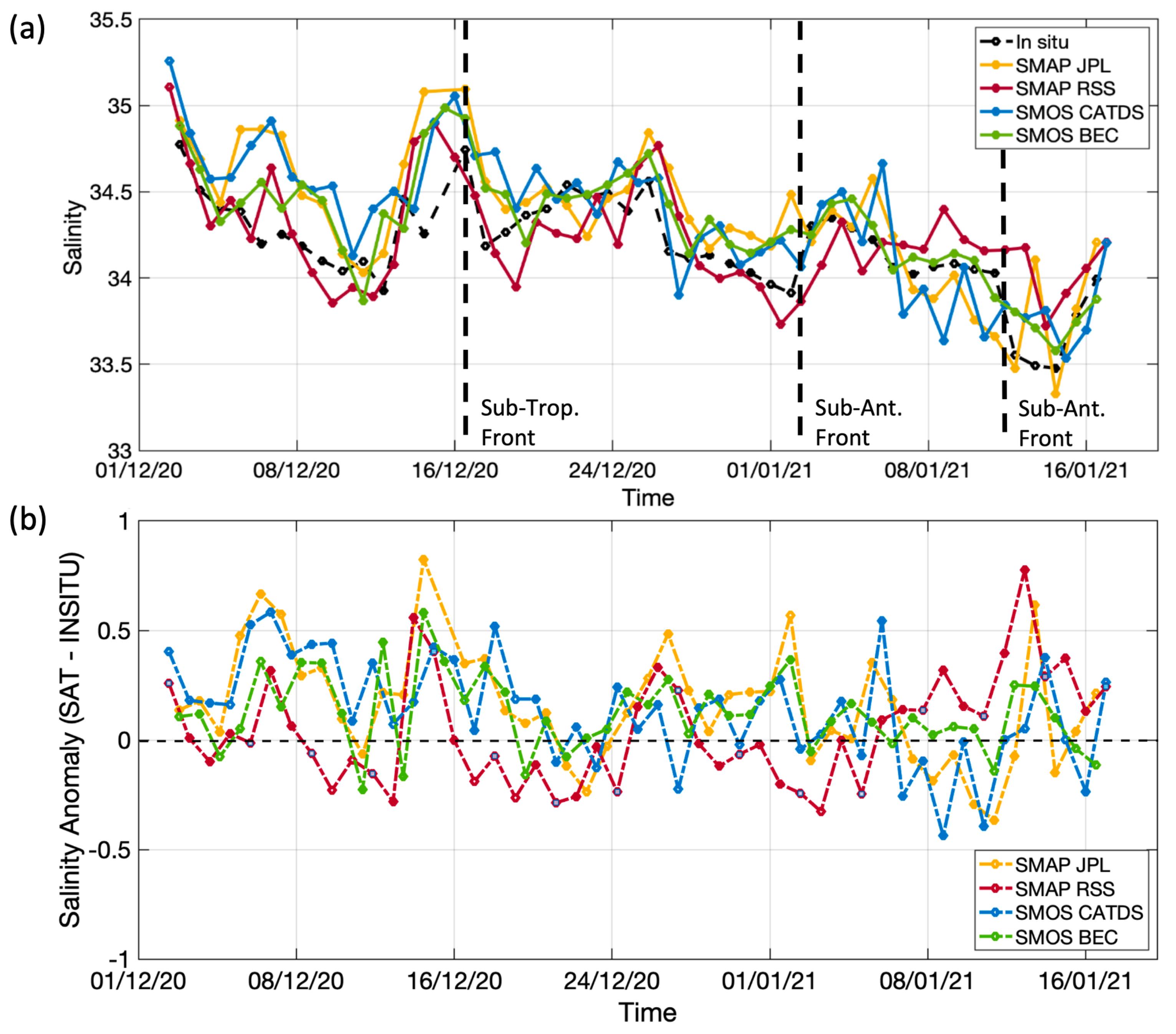
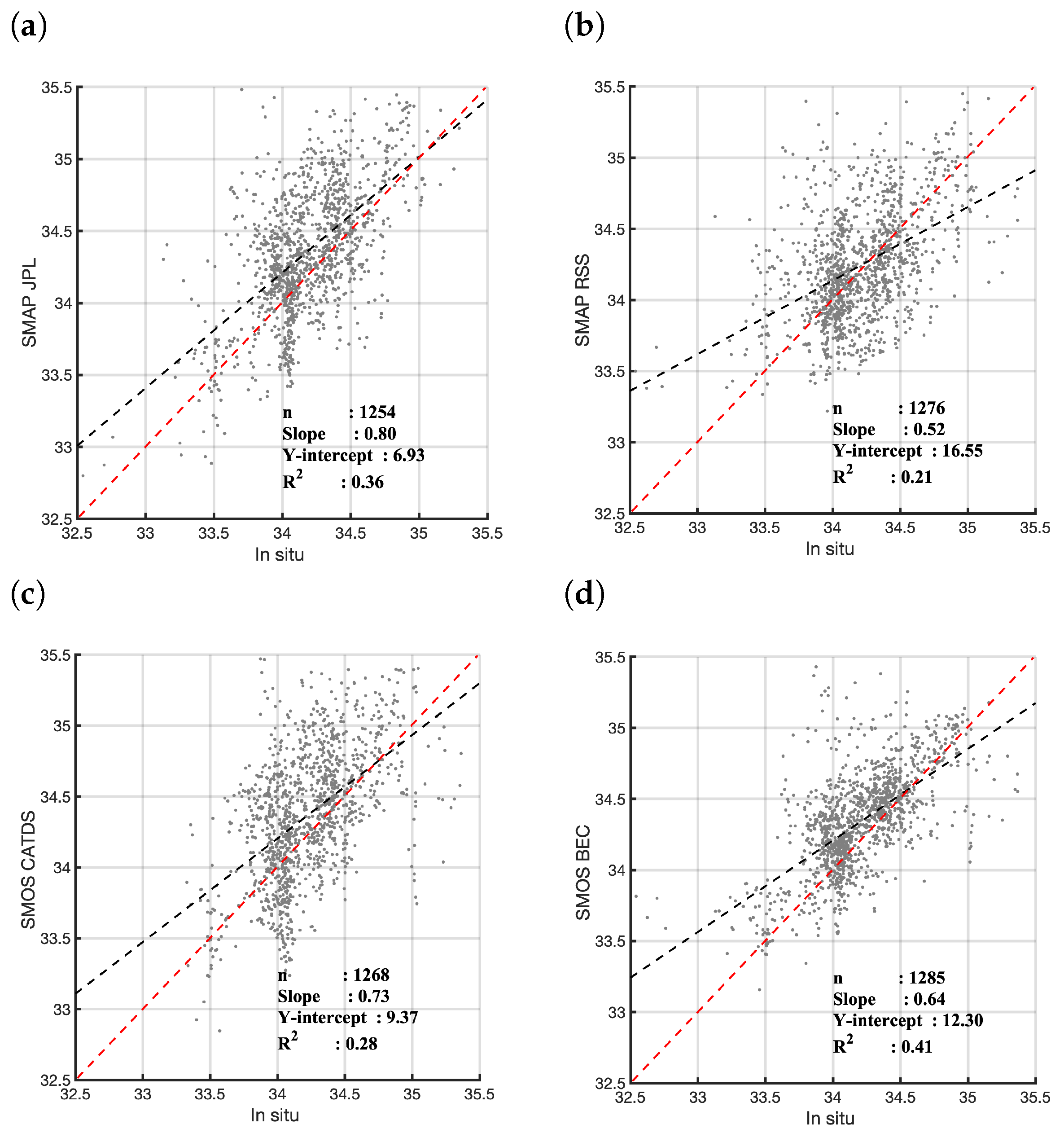
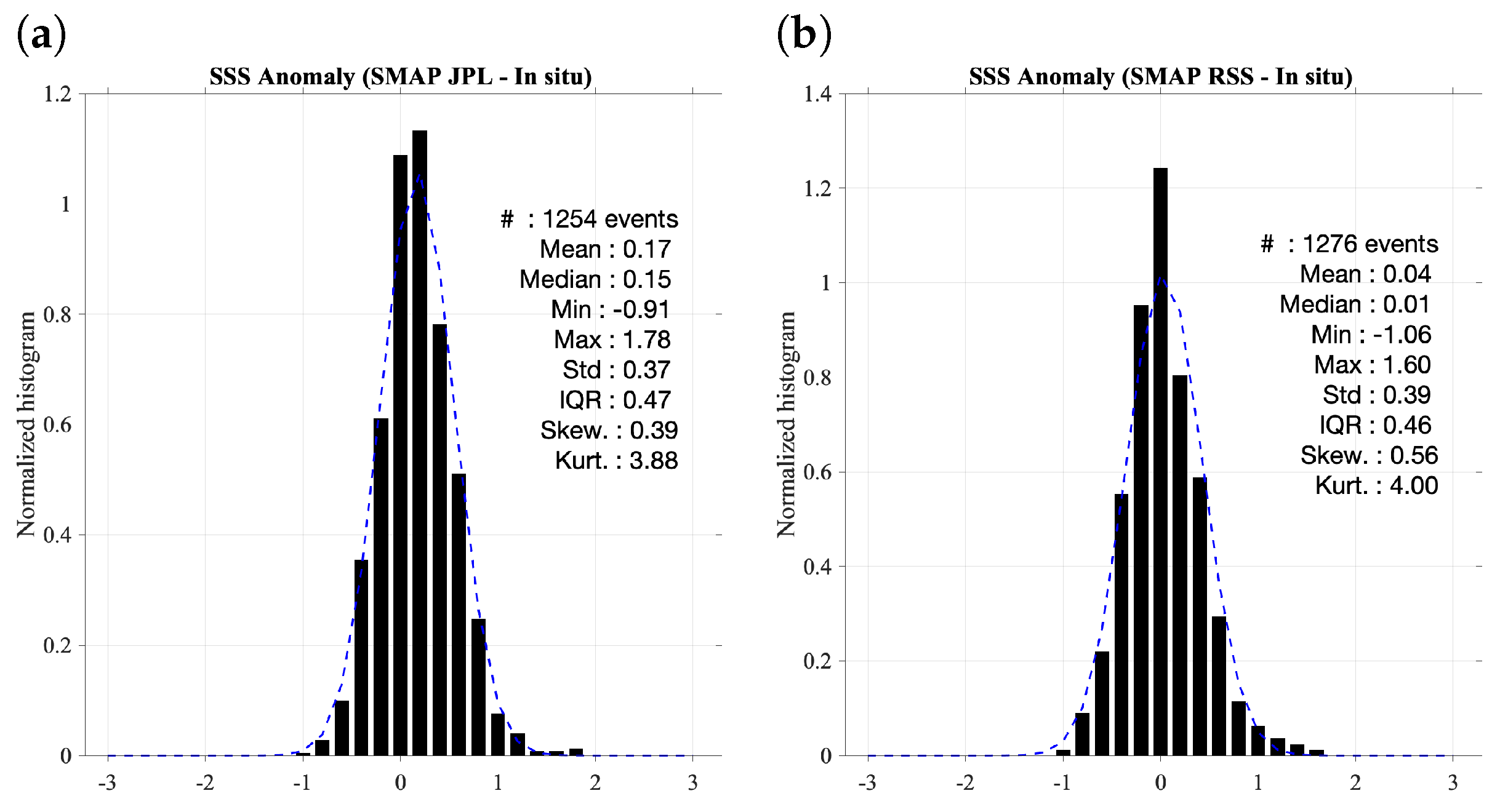
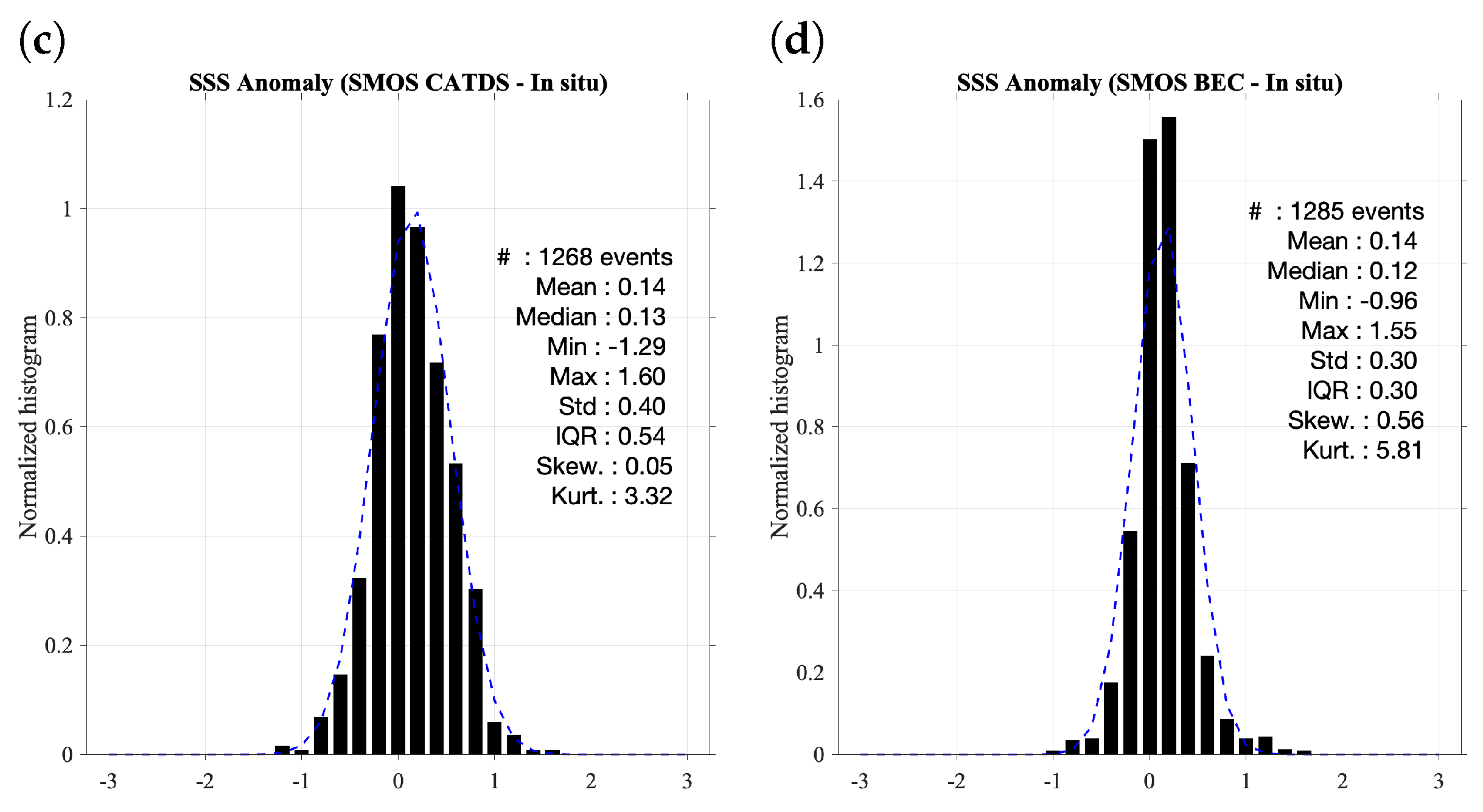
3.2. Validation of Satellite SSS
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Tang, W.; Yueh, S.; Yang, D.; Fore, A.; Hayashi, A.; Lee, T.; Fournier, S.; Holt, B. The potential and challenges of using Soil Moisture Active Passive (SMAP) sea surface salinity to monitor Arctic Ocean freshwater changes. Remote Sens. 2018, 10, 869. [Google Scholar] [CrossRef] [Green Version]
- Olmedo, E.; Gabarró, C.; González-Gambau, V.; Martínez, J.; Ballabrera-Poy, J.; Turiel, A.; Portabella, M.; Fournier, S.; Lee, T. Seven years of SMOS sea surface salinity at high latitudes: Variability in Arctic and Sub-Arctic regions. Remote Sens. 2018, 10, 1772. [Google Scholar] [CrossRef] [Green Version]
- Umbert, M.; Gabarro, C.; Olmedo, E.; Gonçalves-Araujo, R.; Guimbard, S.; Martinez, J. Using Remotely Sensed Sea Surface Salinity and Colored Detrital Matter to Characterize Freshened Surface Layers in the Kara and Laptev Seas during the Ice-Free Season. Remote Sens. 2021, 13, 3828. [Google Scholar] [CrossRef]
- Fournier, S.; Lee, T.; Wang, X.; Armitage, T.W.; Wang, O.; Fukumori, I.; Kwok, R. Sea surface salinity as a proxy for Arctic Ocean freshwater changes. J. Geophys. Res. Ocean. 2020, 125, e2020JC016110. [Google Scholar] [CrossRef]
- Martínez, J.; Gabarró, C.; Turiel, A.; González-Gambau, V.; Umbert, M.; Hoareau, N.; González-Haro, C.; Olmedo, E.; Arias, M.; Catany, R.; et al. Improved BEC SMOS Arctic Sea surface salinity product v3. 1. Earth Syst. Sci. Data 2022, 14, 307–323. [Google Scholar] [CrossRef]
- Banks, C.J.; Gommenginger, C.P.; Srokosz, M.A.; Snaith, H.M. Validating SMOS ocean surface salinity in the Atlantic with Argo and operational ocean model data. IEEE Trans. Geosci. Remote Sens. 2012, 50, 1688–1702. [Google Scholar] [CrossRef]
- Tang, W.; Yueh, S.H.; Fore, A.G.; Hayashi, A. Validation of A quarius sea surface salinity with in situ measurements from A rgo floats and moored buoys. J. Geophys. Res. Ocean. 2014, 119, 6171–6189. [Google Scholar] [CrossRef]
- Salat, J.; Umbert, M.; Ballabrera-Poy, J.; Fernández, P.; Salvador, K.; Martínez, J. The contribution of the Barcelona World Race to improved ocean surface information. A validation of the SMOS remotely sensed salinity. Contrib. Sci. 2013, 9, 89–100. [Google Scholar]
- Gourrion, J.; Szekely, T.; Killick, R.; Owens, B.; Reverdin, G.; Chapron, B. Improved statistical method for quality control of hydrographic observations. J. Atmos. Ocean. Technol. 2020, 37, 789–806. [Google Scholar] [CrossRef]
- Cunningham, S.; Alderson, S.; King, B.; Brandon, M. Transport and variability of the Antarctic circumpolar current in drake passage. J. Geophys. Res. Ocean. 2003, 108. [Google Scholar] [CrossRef] [Green Version]
- Donohue, K.; Tracey, K.; Watts, D.; Chidichimo, M.P.; Chereskin, T. Mean antarctic circumpolar current transport measured in drake passage. Geophys. Res. Lett. 2016, 43, 11760–11767. [Google Scholar] [CrossRef] [Green Version]
- Orsi, A.H.; Whitworth, T.; Nowling, W. On the meridional extent and fronts of the Antarctic Circumpolar Current. Deep Sea Res. Ser. I 1995, 42, 641–673. [Google Scholar] [CrossRef]
- Sokolov, S.; Rintoul, S.R. Circumpolar structure and distribution of the Antarctic Circumpolar Current fronts: 2. Variability and relationship to sea surface height. J. Geophys. Res. Ocean. 2009, 114. [Google Scholar] [CrossRef] [Green Version]
- Giglio, D.; Johnson, G.C. Subantarctic and polar fronts of the Antarctic Circumpolar Current and Southern Ocean heat and freshwater content variability: A view from Argo. J. Phys. Oceanogr. 2016, 46, 749–768. [Google Scholar] [CrossRef]
- Fore, A.G.; Yueh, S.H.; Tang, W.; Stiles, B.W.; Hayashi, A.K. Combined active/passive retrievals of ocean vector wind and sea surface salinity with SMAP. IEEE Trans. Geosci. Remote Sens. 2016, 54, 7396–7404. [Google Scholar] [CrossRef]
- Meissner, T.; Wentz, F.; Manaster, A.; Lindsley, R. Remote Sensing Systems SMAP Ocean Surface Salinities Level 3 Running 8-Day, Version 4.0 Validated Release; Remote Sensing Systems: Santa Rosa, CA, USA, 2019. [Google Scholar]
- Olmedo, E.; González-Haro, C.; Hoareau, N.; Umbert, M.; González-Gambau, V.; Martínez, J.; Gabarró, C.; Turiel, A. Nine years of SMOS sea surface salinity global maps at the Barcelona Expert Center. Earth Syst. Sci. Data 2021, 13, 857–888. [Google Scholar] [CrossRef]
- Boutin, J.; Vergely, J.L.; Marchand, S.; d’Amico, F.; Hasson, A.; Kolodziejczyk, N.; Reul, N.; Reverdin, G.; Vialard, J. New SMOS Sea Surface Salinity with reduced systematic errors and improved variability. Remote Sens. Environ. 2018, 214, 115–134. [Google Scholar] [CrossRef] [Green Version]

Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Umbert, M.; Hoareau, N.; Salat, J.; Salvador, J.; Guimbard, S.; Olmedo, E.; Gabarró, C. The Contribution of the Vendée Globe Race to Improved Ocean Surface Information: A Validation of the Remotely Sensed Salinity in the Sub-Antarctic Zone. J. Mar. Sci. Eng. 2022, 10, 1078. https://doi.org/10.3390/jmse10081078
Umbert M, Hoareau N, Salat J, Salvador J, Guimbard S, Olmedo E, Gabarró C. The Contribution of the Vendée Globe Race to Improved Ocean Surface Information: A Validation of the Remotely Sensed Salinity in the Sub-Antarctic Zone. Journal of Marine Science and Engineering. 2022; 10(8):1078. https://doi.org/10.3390/jmse10081078
Chicago/Turabian StyleUmbert, Marta, Nina Hoareau, Jordi Salat, Joaquín Salvador, Sébastien Guimbard, Estrella Olmedo, and Carolina Gabarró. 2022. "The Contribution of the Vendée Globe Race to Improved Ocean Surface Information: A Validation of the Remotely Sensed Salinity in the Sub-Antarctic Zone" Journal of Marine Science and Engineering 10, no. 8: 1078. https://doi.org/10.3390/jmse10081078
APA StyleUmbert, M., Hoareau, N., Salat, J., Salvador, J., Guimbard, S., Olmedo, E., & Gabarró, C. (2022). The Contribution of the Vendée Globe Race to Improved Ocean Surface Information: A Validation of the Remotely Sensed Salinity in the Sub-Antarctic Zone. Journal of Marine Science and Engineering, 10(8), 1078. https://doi.org/10.3390/jmse10081078