
Time-Domain Implementation and Analyses of Multi-Motion Modes of Floating Structures

 ,
, 
 ,
, 

Abstract
:1. Introduction
2. TALOS WEC
3. Frequency-Domain Governing Equation and Responses
3.1. Frequency-Domain Governing Equation
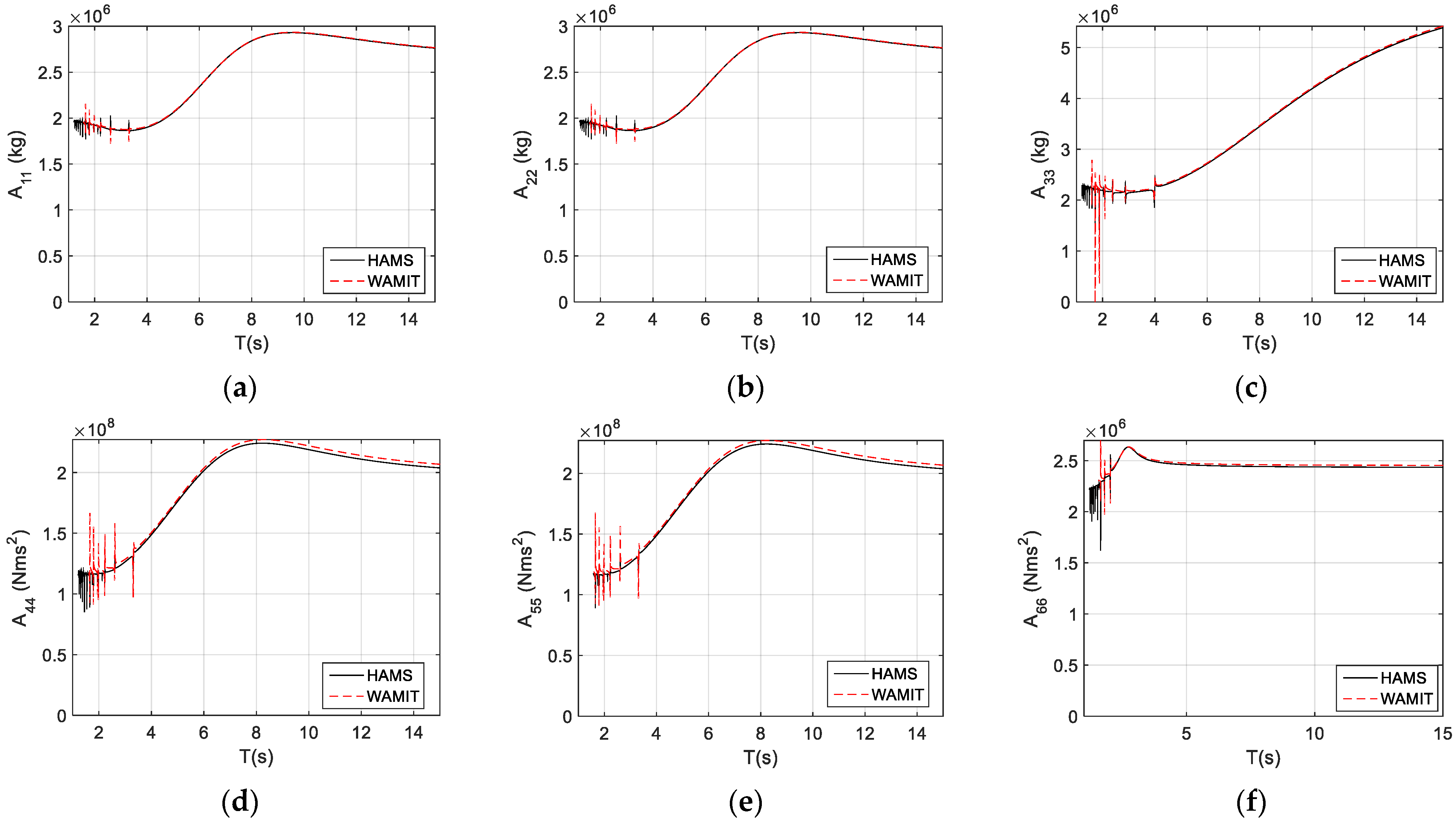
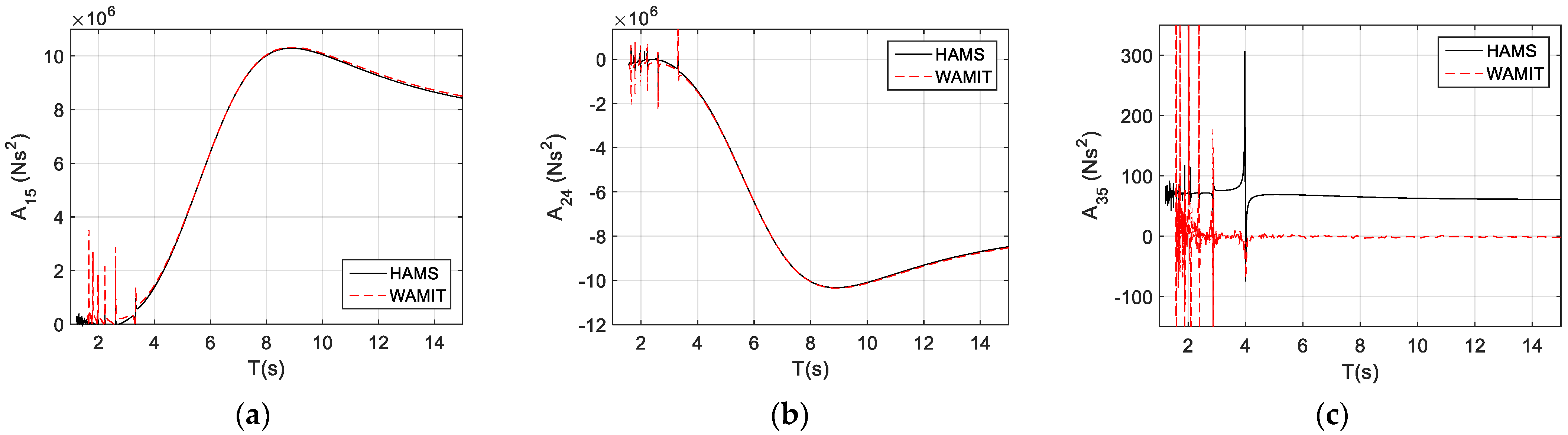
3.2. Added Mass
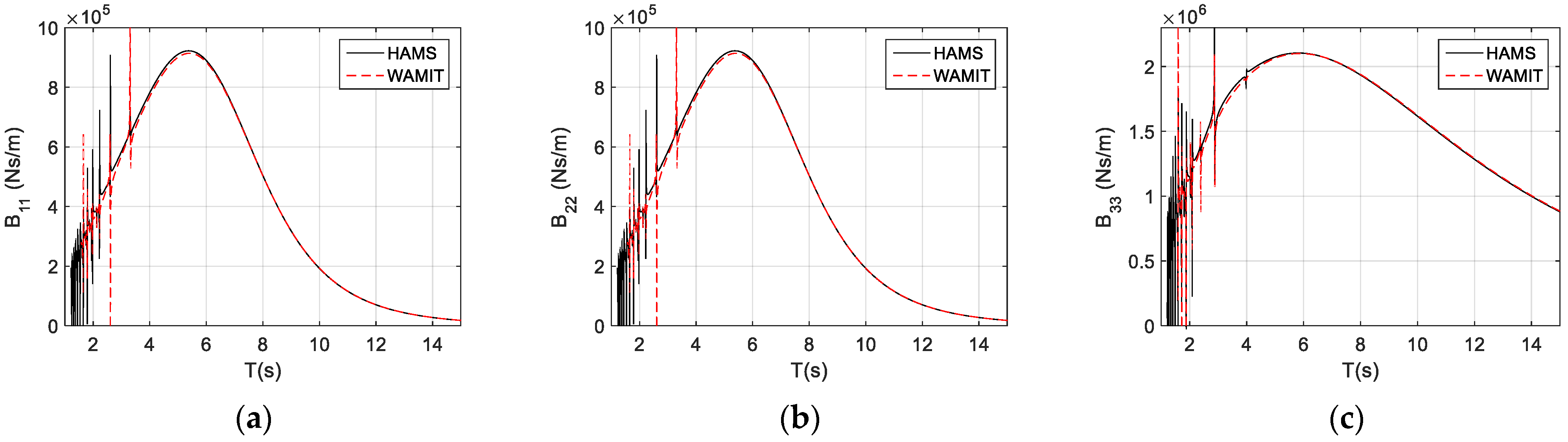
3.3. Radiation-Damping Coefficients
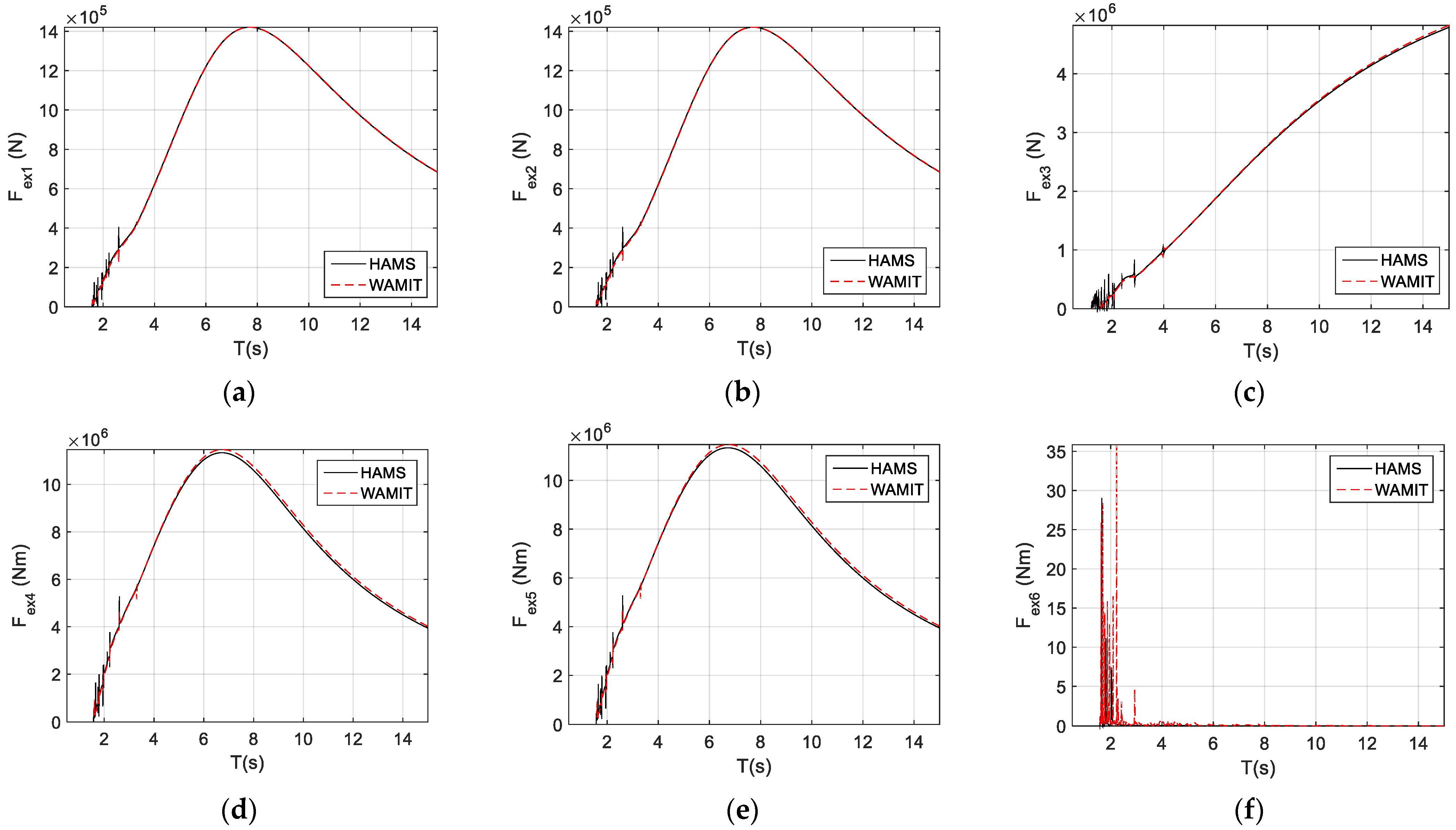
3.4. Wave Excitation
3.5. Response Amplitude Operators (RAOs)
4. Time-Domain Dynamic Equation and Analysis
4.1. Dynamic Equation
4.2. Memory Effect and the Impulse Functions
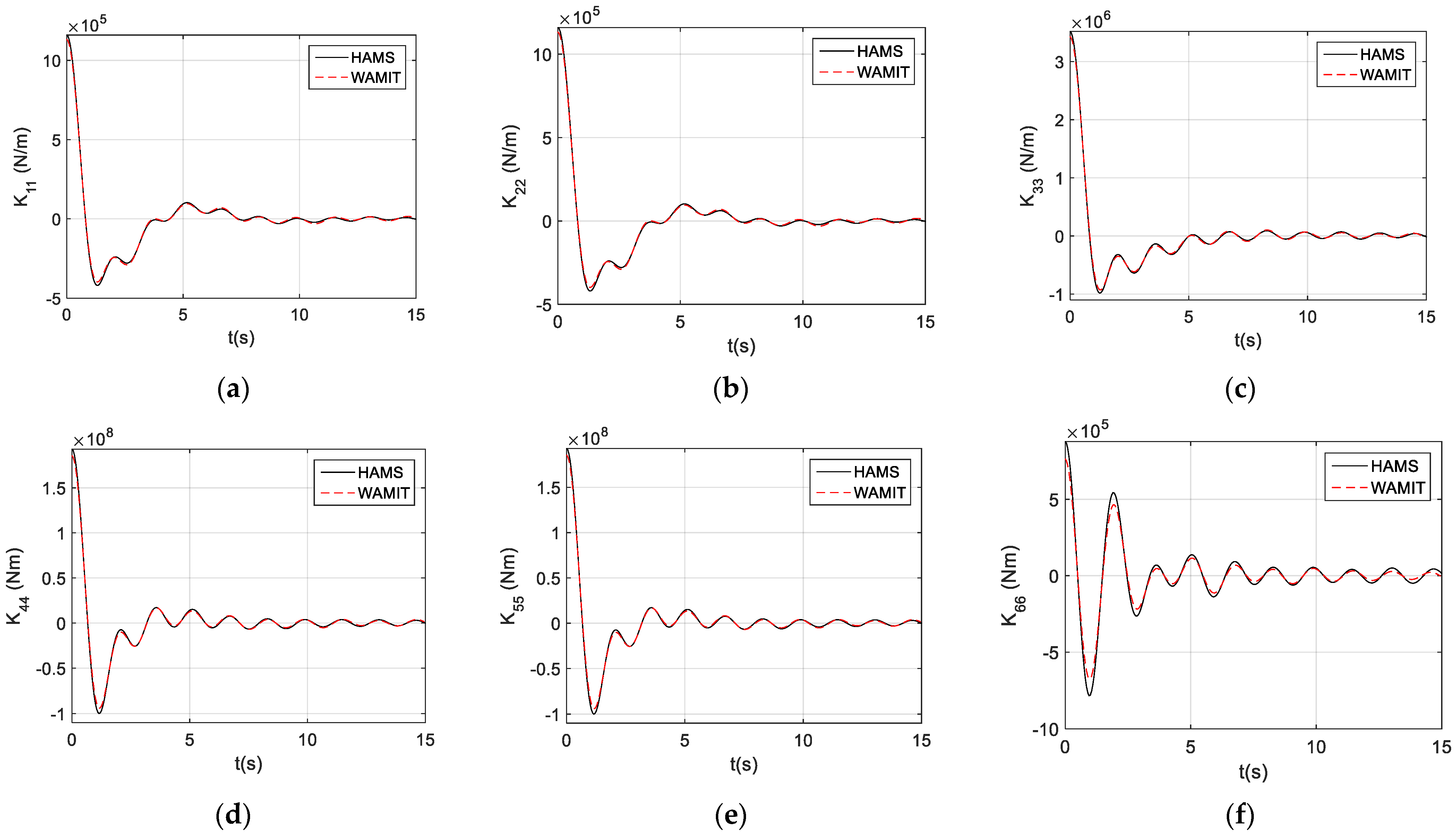
4.3. Impulse Function
4.4. Added Mass at Infinite Frequency
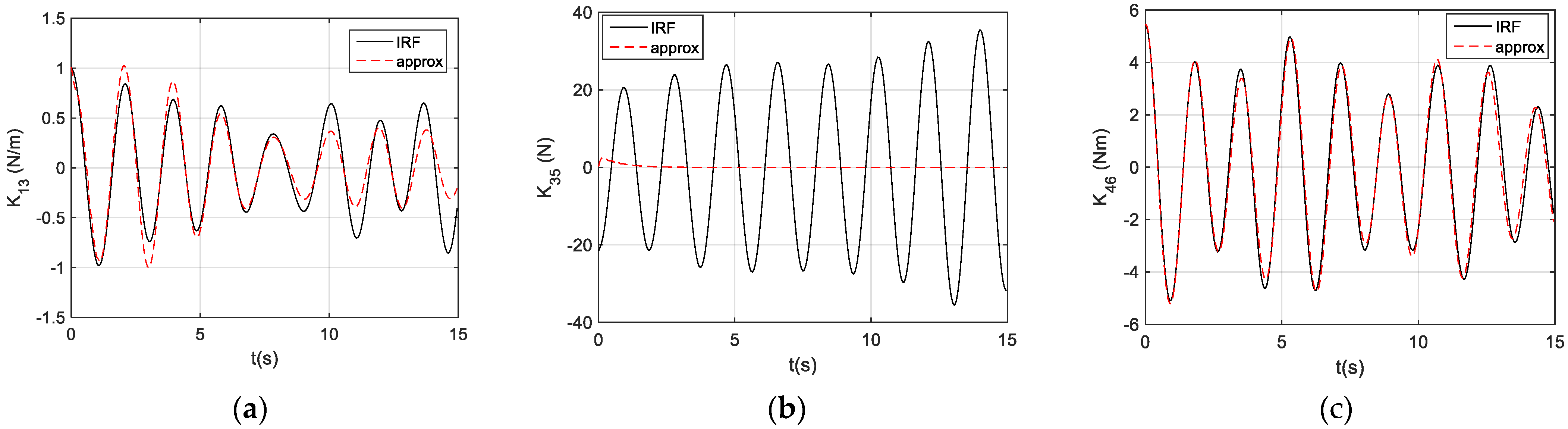
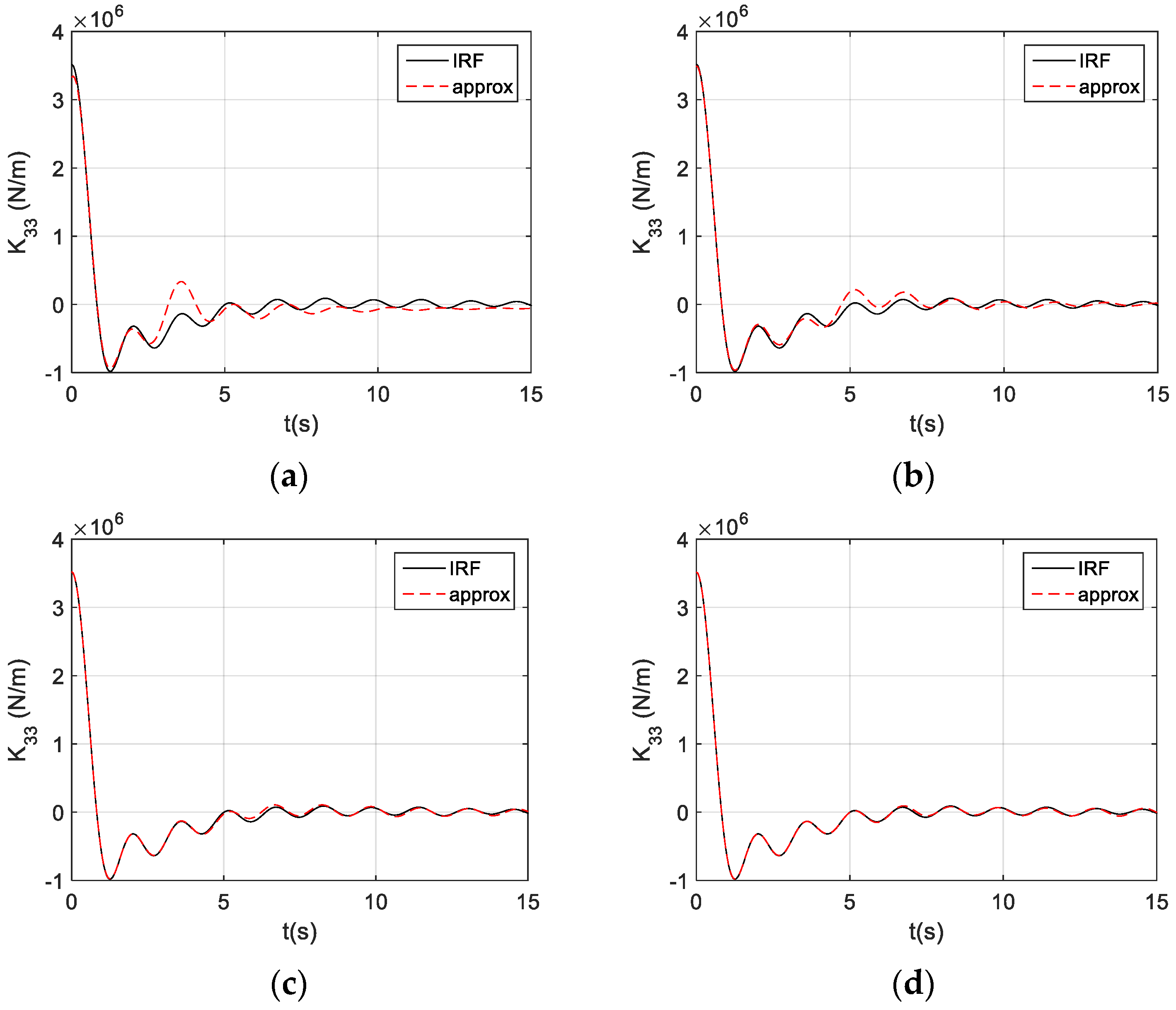
5. Approximations of Impulse Function and Memory Effect
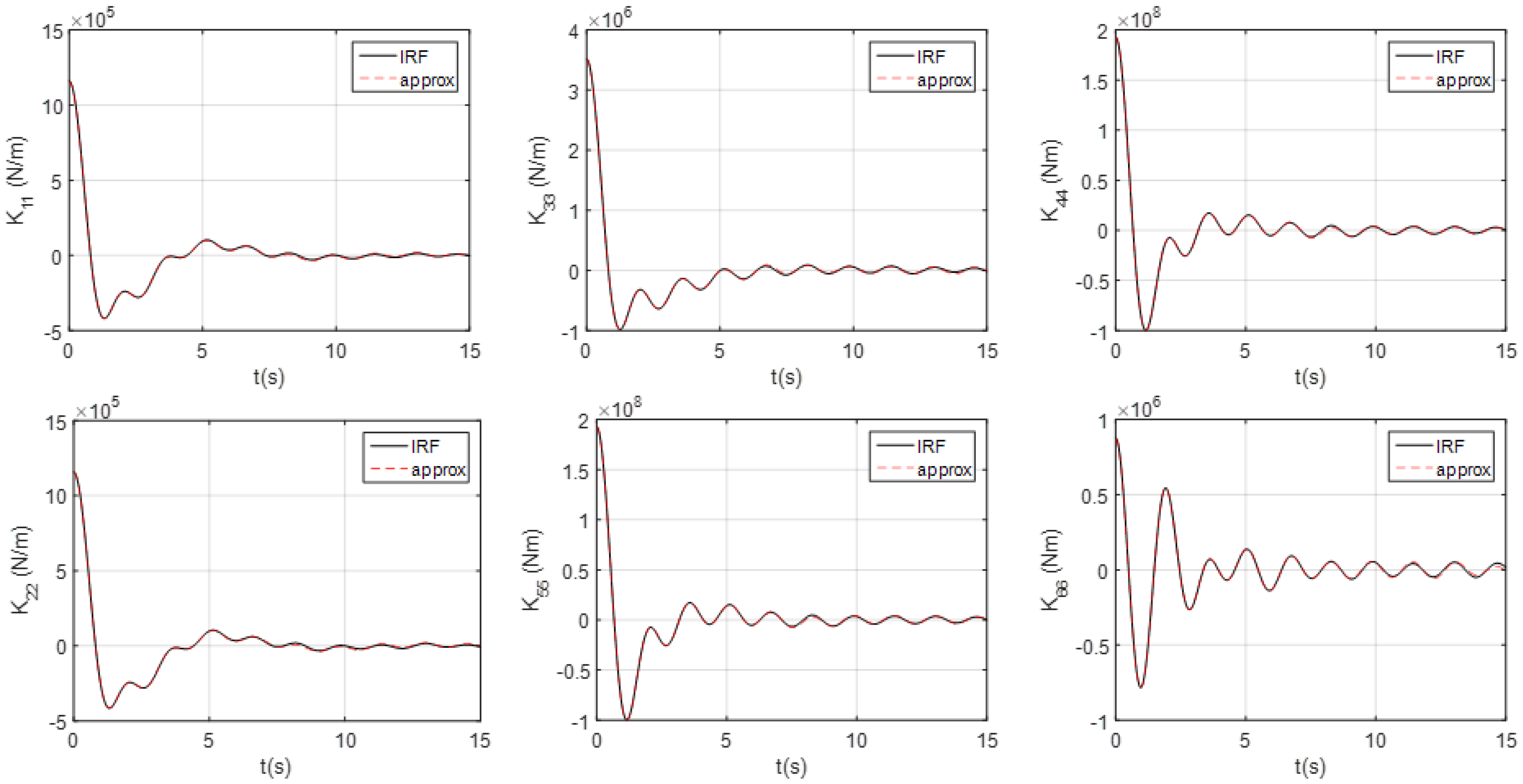
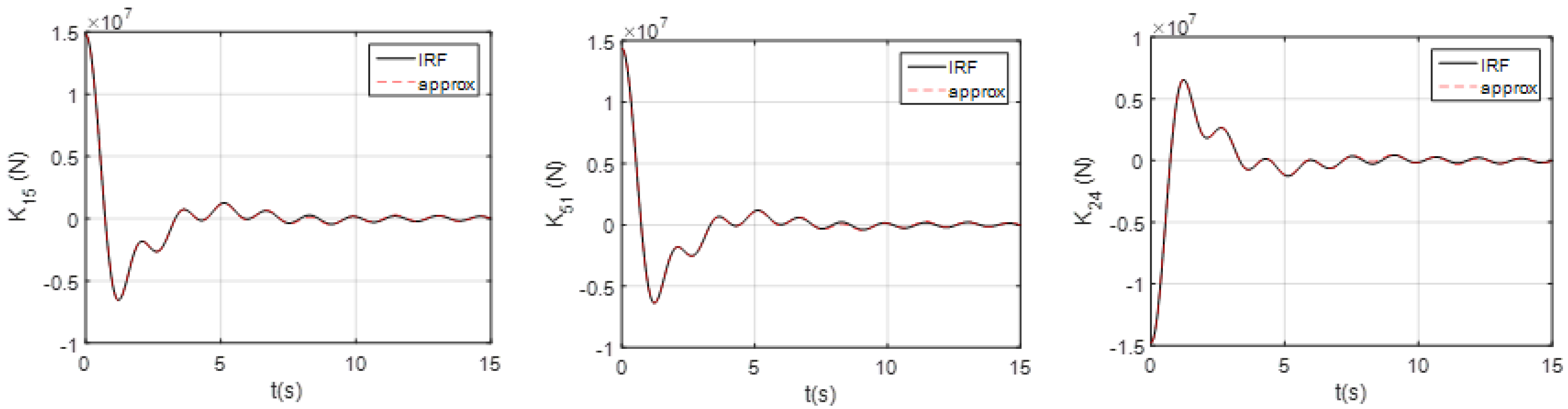
5.1. Approximation of Impulse Function
5.2. Calculation of the Memory Effect
- (1)
- Method ‘1’: solving additional differential equations [31]
- (2)
- Method ‘2’: a recursive method for calculating Ik [32]
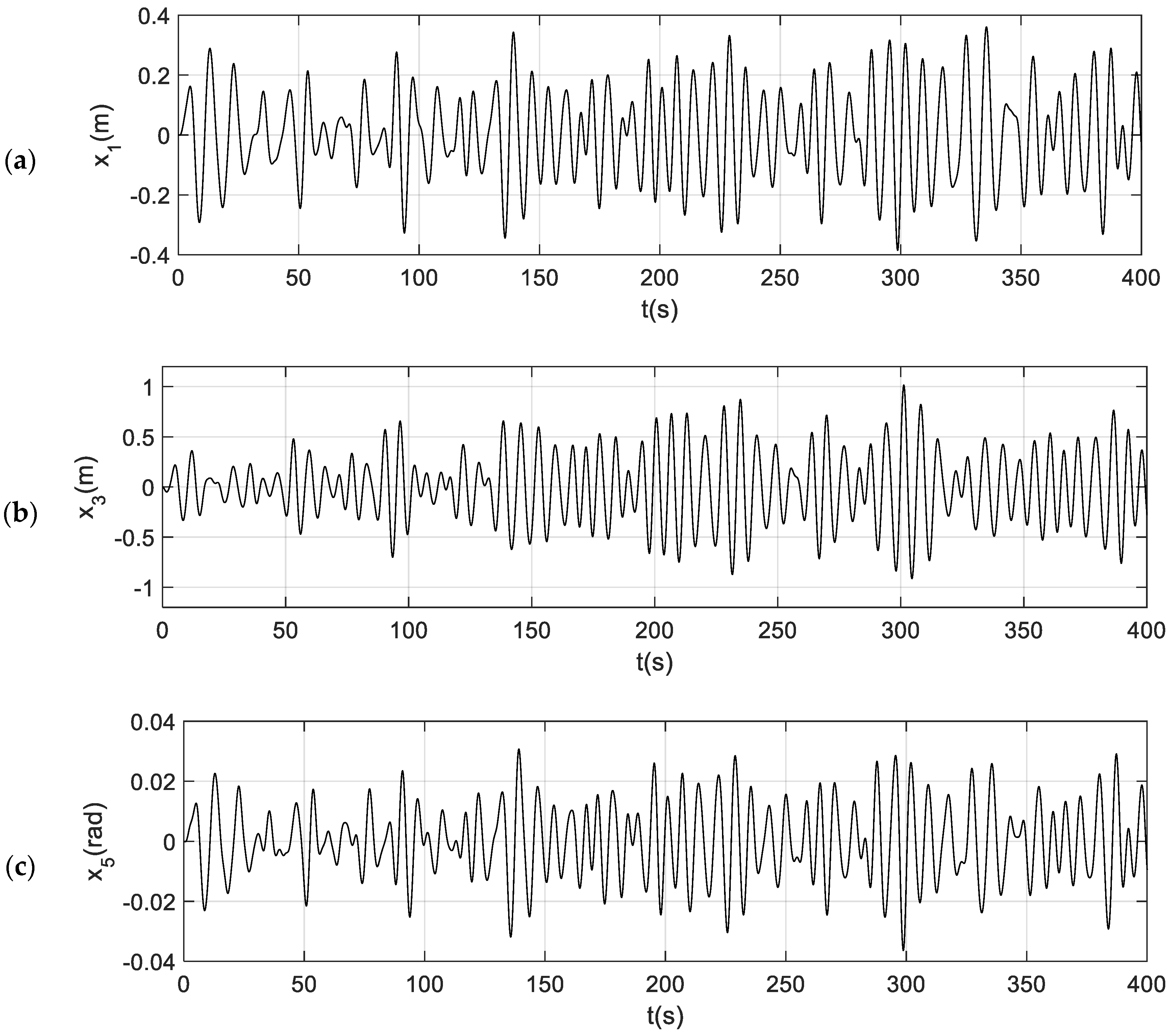
6. Implementation and Validation of Time-Domain Analysis
6.1. Implementation of Time-Domain Analysis
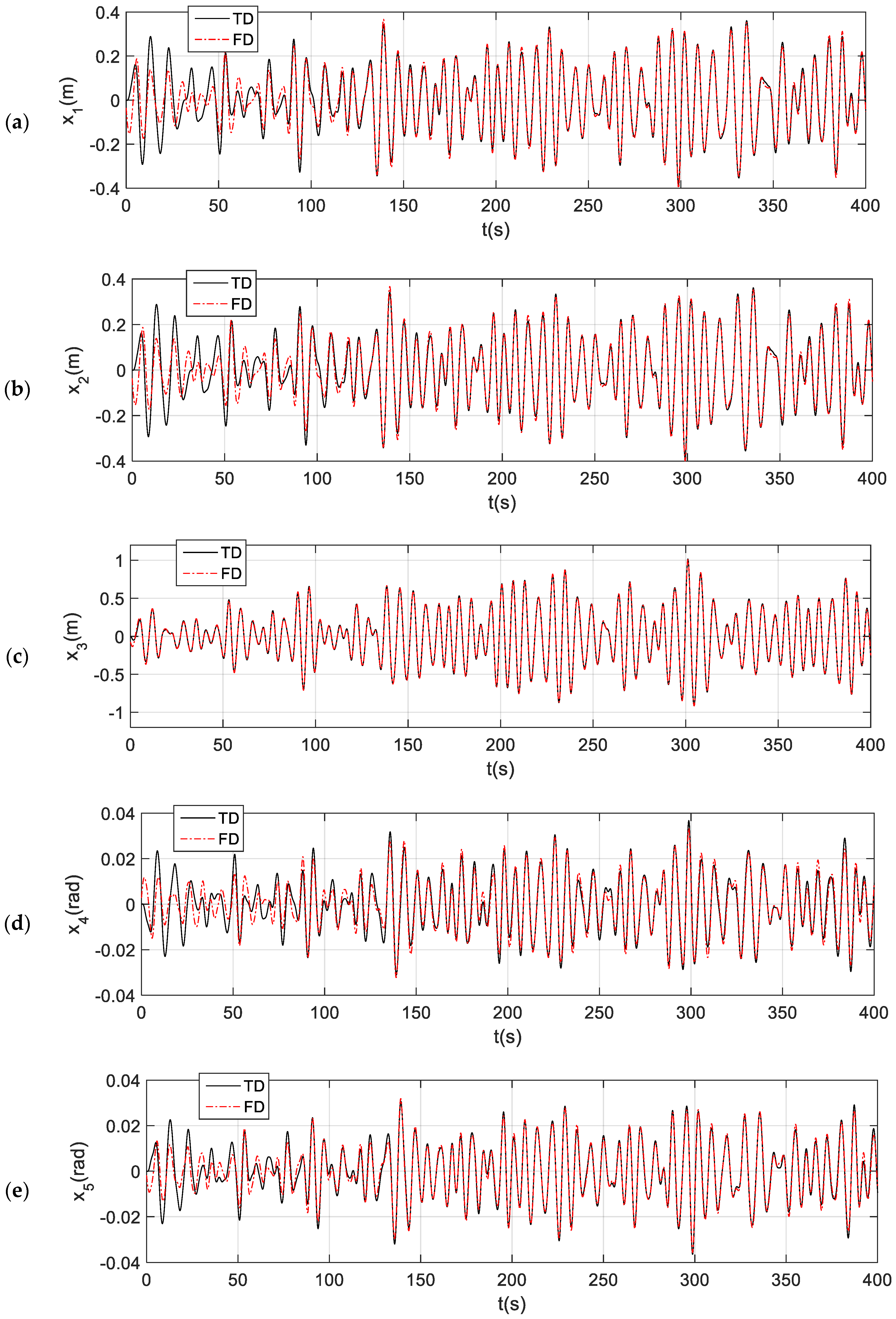
6.2. Validations of Time-Domain Modeling
- The transformation from the radiation-damping coefficients to impulse functions, as well as how to efficiently approximate the impulse functions;
- The transformation of the frequency-dependent added mass to the added mass at the infinite frequency;
- The transformation from the radiation-damping effects to the memory effects, together with the method for how we can reliably and rapidly calculate the memory effect;
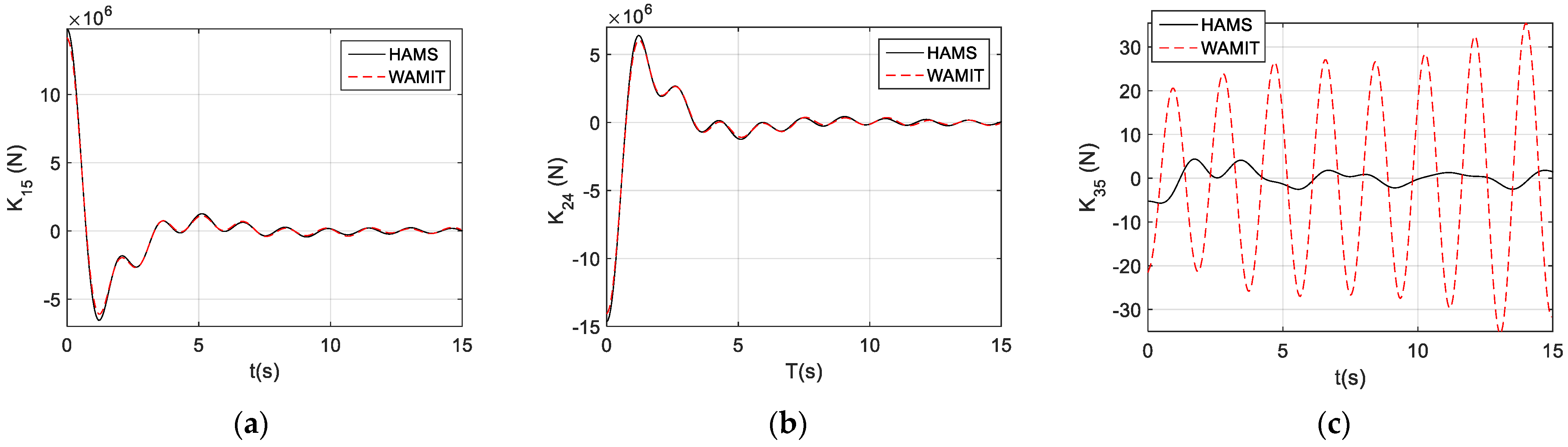
- The inclusions of the coupling terms between different motion modes, especially the calculation of the coupled memory-effect terms;
- The transformation of the excitation responses to the forces in the time domain for a given wave spectrum.
- (1)
- The time-domain analysis can be obtained by solving Equation (22), in which only the linear forces are applied. For the purpose of comparison, all these linear forces must be presented in the frequency-domain analysis, too, and the corresponding motion responses in the frequency domain can be obtained under same conditions as those in the time-domain analyses.
- (2)
- For a comparison, a time history can be generated directly based on the RAOs in the frequency-domain analysis, in which a transformation is made in a formula as
7. Conclusions
- A discussion of how the transformation from the frequency domain to the time domain can be made, and a direct transformation is possible, but not very useful due to its inherent limitations;
- The method for calculating the impulse function and the added mass at infinite frequency based on the frequency-domain prediction was presented, and a MATLAB function was presented for reference;
- The approximation of the impulse function using the Prony approximation method was introduced, and a comparison with the results from WAMIT F2T were made to ensure that the calculation method was reliable;
- A simple recursive method for calculating the memory-effect based on the Prony approximation was introduced and the results were validated for its accuracy;
- A validation method for the time-domain implementation was explained, which can be used for ensuring the correctness of the time-domain analysis;
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A
Appendix B
References
- Brommundt, M.; Krause, L.; Merz, K.; Muskulus, M. Mooring System Optimization for Floating Wind Turbines using Frequency Domain Analysis. Energy Procedia 2012, 24, 289–296. [Google Scholar] [CrossRef] [Green Version]
- Nagata, S.; Toyota, K.; Imai, Y.; Setoguchi, T.; Mamun, M.A.H.; Nakagawa, H. Frequency domain analysis on primary conversion efficiency of a floating OWC-type wave energy converter ‘Backward bent Duct Buoy’. In Proceedings of the 9th European Wave and Tidal Energy Conference, Southampton, UK, 5–9 September 2011. [Google Scholar]
- Fitzgerald, J.; Bergdahl, L. Including moorings in the assessment of a generic offshore wave energy converter: A frequency domain approach. Mar. Struct. 2008, 21, 23–46. [Google Scholar] [CrossRef]
- Liu, Y. HAMS: A Frequency-Domain Preprocessor for Wave-Structure Interactions—Theory, Development, and Application. J. Mar. Sci. Eng. 2019, 7, 81. [Google Scholar] [CrossRef] [Green Version]
- Perez, T.; Fossen, T.I. Practical aspects of frequency-domain identification of dynamic models of marine structures from hydrodynamic data. Ocean Eng. 2010, 38, 426–435. [Google Scholar] [CrossRef]
- Kim, D.; Chen, L.; Blaszkowski, Z. Linear frequency domain hydroelastic analysis for McDermott’s mobile offshore base using WAMIT. In Proceedings of the 3rd International Workshopon Very Large Floating Structures (VLFS ‘99), Honolulu, HI, USA, 22–24 September 1999. [Google Scholar]
- Michele, S.; Zheng, S.; Greaves, D. Wave energy extraction from a floating flexible circular plate. Ocean Eng. 2022, 245, 110275. [Google Scholar] [CrossRef]
- Michele, S.; Buriani, F.; Renzi, E.; Van Rooij, M.; Jayawardhana, B.; Vakis, A.I. Wave Energy Extraction by Flexible Floaters. Energies 2020, 13, 6167. [Google Scholar] [CrossRef]
- Sheng, W.; Lewis, A. Assessment of Wave Energy Extraction from Seas: Numerical Validation. J. Energy Resour. Technol. 2012, 134, 041701. [Google Scholar] [CrossRef]
- Budal, K.; Falnes, J. A resonant point absorber of ocean-wave power. Nature 1975, 256, 478–479. [Google Scholar]
- Falnes, J. Wave-Energy Conversion through Relative Motion between Two Single-Mode Oscillating Bodies. Trans. ASME 1999, 121, 32–38. [Google Scholar] [CrossRef]
- Sheng, W.; Lewis, A. Power Takeoff Optimization for Maximizing Energy Conversion of Wave-Activated Bodies. IEEE J. Ocean. Eng. 2016, 41, 529–540. [Google Scholar] [CrossRef]
- Lasa, J.; Antolin, J.C.; Angulo, C.; Estensoro, P.; Santos, M.; Ricci, P. Design, Construction and Testing of a Hydraulic Power Take-off for Wave Energy Converters. Energies 2012, 5, 2030–2052. [Google Scholar] [CrossRef] [Green Version]
- Falcão, A.F.D.O. Modelling and control of oscillating-body wave energy converters with hydraulic power take-off and gas accumulator. Ocean Eng. 2007, 34, 2021–2032. [Google Scholar] [CrossRef]
- Henderson, R. Design, simulation, and testing of a novel hydraulic power take-off system for the Pelamis wave energy converter. Renew. Energy 2006, 31, 271–283. [Google Scholar] [CrossRef]
- Aggidis, G.; Taylor, C.J. Overview of wave energy converter devices and the development of a new multi-axis laboratory prototype. IFAC-PapersOnLine 2017, 50, 15651–15656. [Google Scholar] [CrossRef]
- Kelly, J.F.; Wright, W.M.D.; Sheng, W.; O’Sullivan, K. Implementation and Verification of a Wave-to-Wire Model of an Oscillating Water Column with Impulse Turbine. IEEE Trans. Sustain. Energy 2016, 7, 546–553. [Google Scholar] [CrossRef]
- Natanzi, S.; Teixeira, J.A.; Laird, G. A novel high-efficiency impulse turbine for use in oscilalting water column device. In Proceedings of the 9th European Wave and Tidal Energy Conference, Southampton, UK, 5–9 September 2011. [Google Scholar]
- Pereiras, B.; Castro, F.; El Marjani, A.; Rodríguez, M.A. An improved radial impulse turbine for OWC. Renew. Energy 2010, 36, 1477–1484. [Google Scholar] [CrossRef]
- Henriques, J.; Portillo, J.; Sheng, W.; Gato, L.; Falcão, A. Dynamics and control of air turbines in oscillating-water-column wave energy converters: Analyses and case study. Renew. Sustain. Energy Rev. 2019, 112, 571–589. [Google Scholar] [CrossRef]
- Sheng, W.; Alcorn, R.; Lewis, A. On improving wave energy conversion, part I: Optimal and control technologies. Renew. Energy 2015, 75, 922–934. [Google Scholar] [CrossRef]
- Todalshaug, J.H.; Ásgeirsson, G.S.; Hjálmarsson, E.; Maillet, J.; Möller, P.; Pires, P.; Guérinel, M.; Lopes, M. Tank testing of an inherently phase controlled wave energy converter. In Proceedings of the 11th European Wave and Tidal Energy Conference, Nantes, France, 6–11 September 2015. [Google Scholar]
- Falcão, A.F.O.; Henriques, J. Effect of non-ideal power take-off efficiency on performance of single- and two-body reactively controlled wave energy converters. J. Ocean Eng. Mar. Energy 2015, 1, 273–286. [Google Scholar] [CrossRef] [Green Version]
- Li, G.; Belmont, M.R. Model predictive control of sea wave energy converters—Part I: A convex approach for the case of a single device. Renew. Energy 2014, 69, 453–463. [Google Scholar] [CrossRef]
- Taghipour, R.; Perez, T.; Moan, T. Hybrid frequency–time domain models for dynamic response analysis of marine structures. Ocean Eng. 2008, 35, 685–705. [Google Scholar] [CrossRef]
- Rahmati, M.; Aggidis, G. Numerical and experimental analysis of the power output of a point absorber wave energy converter in irregular waves. Ocean Eng. 2016, 111, 483–492. [Google Scholar] [CrossRef] [Green Version]
- McCabe, A.; Aggidis, G.; Stallard, T. A time-varying parameter model of a body oscillating in pitch. Appl. Ocean Res. 2006, 28, 359–370. [Google Scholar] [CrossRef]
- Cummins, W.E. The Impulse Response Function and Ship Motions; Department of the Navy: Monterey, CA, USA, 1962.
- Ogilvie, T.F. Recent Progress Toward the Understanding and Prediction of Ship Motions. In Proceedings of the 5th Symposium on Naval Hydrodynamics, Bergen, Norway, 10–12 September 1964. [Google Scholar]
- Duarte, T.; Sarmento, A.; Alves, M.; Jonkman, J. State-space realization of the wave-radiation force within FAST. In Proceedings of the ASME 2013 32nd International Conference on Ocean, Offshore and Arctic Engineering, Nantes, France, 8–13 June 2013. [Google Scholar]
- Duclos, G.; Clement, A.H.; Chatry, G. Absorption of outgoing waves in a numerical wave tank using a self-adaptive boundary condition. Int. J. Offshore Polar Eng. 2001, 11, ISOPE-01-11-3-168. [Google Scholar]
- Sheng, W.; Alcorn, R.; Lewis, A. A new method for radiation forces for floating platforms in waves. Ocean Eng. 2015, 105, 43–53. [Google Scholar] [CrossRef]
- UKRI. Projects to Unlock the Potential of Marine Wave Energy. 2021. Available online: https://www.ukri.org/news/projects-to-unlock-the-potential-of-marine-wave-energy/ (accessed on 1 November 2021).
- SmartWave. High Resolution Sea State Simulation with SmartWave. 2021. Available online: https://www.offshorewindlibrary.com/smartwave/ (accessed on 15 December 2021).
- Mei, C.C.; Stiassnie, M.; Yue, D.K. Theory and Applications of Ocean Surface Waves: Linear Aspects and Nonlinear Aspects; World Scientific: Singapore, 2005. [Google Scholar]
- Newman, J.N. Marine Hydrodynamics, 40th anniversary ed.; The MIT Press: Cambridge, MA, USA, 2017. [Google Scholar]
- Faltinsen, O.M. Sea Loads on Ships and Offshore Structures; Cambridge University Press: Cambridge, UK, 1990. [Google Scholar]
- Liu, Y. HAMS: An Open-Source Computer Program for the Analysis of Wave Diffraction and Radiation of Three-Dimensional Floating or Submerged Structures. 2020. Available online: https://github.com/YingyiLiu/HAMS (accessed on 19 October 2021).
- WAMIT. User Manual (v73). Available online: https://www.wamit.com/manualupdate/v73_manual.pdf (accessed on 1 November 2021).
- Sheng, W.; Tapoglou, E.; Ma, X.; Taylor, C.; Dorrell, R.; Parsons, D.; Aggidis, G. Hydrodynamic studies of floating structures: Comparison of wave-structure interaction modelling. Ocean Eng. 2022, 249, 110878. [Google Scholar] [CrossRef]
- Babarit, A.; Hals, J.; Muliawan, M.; Kurniawan, A.; Moan, T.; Krokstad, J. Numerical benchmarking study of a selection of wave energy converters. Renew. Energy 2012, 41, 44–63. [Google Scholar] [CrossRef]
- Holthuijsen, L.H. Waves in Oceanic and Coastal Waters; Cambridge University Press (CUP): Cambridge, UK, 2007. [Google Scholar]
- Duclos, G.; Babarit, A.; Clément, A.H. Optimizing the Power Take off of a Wave Energy Converter with Regard to the Wave Climate. J. Offshore Mech. Arct. Eng. 2006, 128, 56–64. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Added Mass | WAMIT | Calculation | Error (%) |
|---|---|---|---|
| (kg) | 2.047 × 106 | 2.040 × 106 | −0.338 |
| (Ns2) | 1.582 × 106 | 1.620 × 106 | 2.430 |
| (kg) | 2.583 × 106 | 2.580 × 106 | −0.116 |
| (Nms2) | 1.353 × 108 | 1.360 × 108 | 0.517 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sheng, W.; Tapoglou, E.; Ma, X.; Taylor, C.J.; Dorrell, R.; Parsons, D.R.; Aggidis, G. Time-Domain Implementation and Analyses of Multi-Motion Modes of Floating Structures. J. Mar. Sci. Eng. 2022, 10, 662. https://doi.org/10.3390/jmse10050662
Sheng W, Tapoglou E, Ma X, Taylor CJ, Dorrell R, Parsons DR, Aggidis G. Time-Domain Implementation and Analyses of Multi-Motion Modes of Floating Structures. Journal of Marine Science and Engineering. 2022; 10(5):662. https://doi.org/10.3390/jmse10050662
Chicago/Turabian StyleSheng, Wanan, Evdokia Tapoglou, Xiandong Ma, C. James Taylor, Robert Dorrell, Daniel R. Parsons, and George Aggidis. 2022. "Time-Domain Implementation and Analyses of Multi-Motion Modes of Floating Structures" Journal of Marine Science and Engineering 10, no. 5: 662. https://doi.org/10.3390/jmse10050662
APA StyleSheng, W., Tapoglou, E., Ma, X., Taylor, C. J., Dorrell, R., Parsons, D. R., & Aggidis, G. (2022). Time-Domain Implementation and Analyses of Multi-Motion Modes of Floating Structures. Journal of Marine Science and Engineering, 10(5), 662. https://doi.org/10.3390/jmse10050662