
Design and Dynamic Analysis of a Novel Large-Scale Barge-Type Floating Offshore Wind Turbine with Aquaculture Cage




Abstract
1. Introduction
2. Theoretical Methods
2.1. Equation of Motion in the Time Domain
2.2. Aerodynamic Loads
2.3. Potential Flow Theory [37]
2.4. Morison Equation
3. Numerical Model and Model Testing
3.1. Design of the LSBT-FOWT-AC
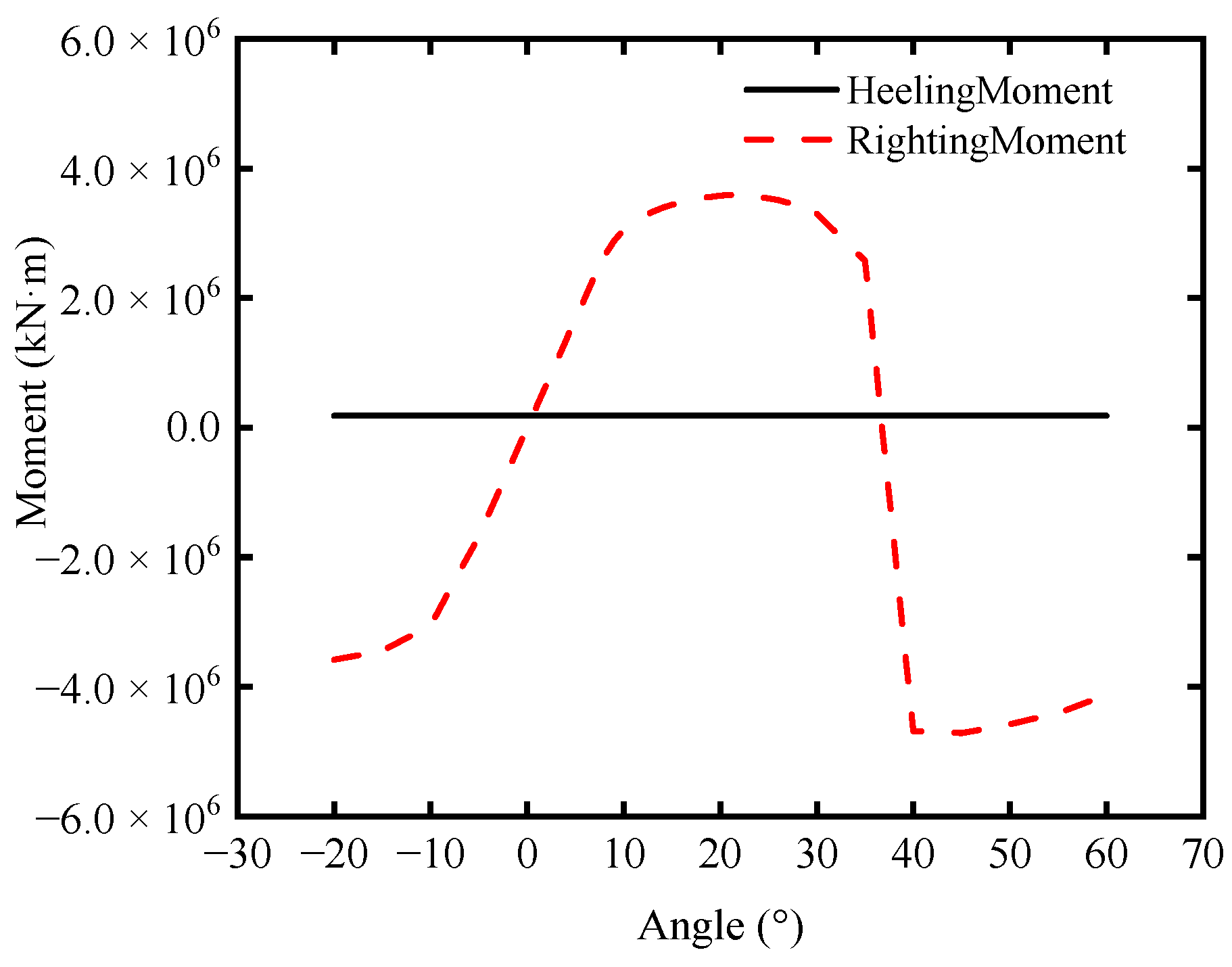
3.2. Stability Analysis
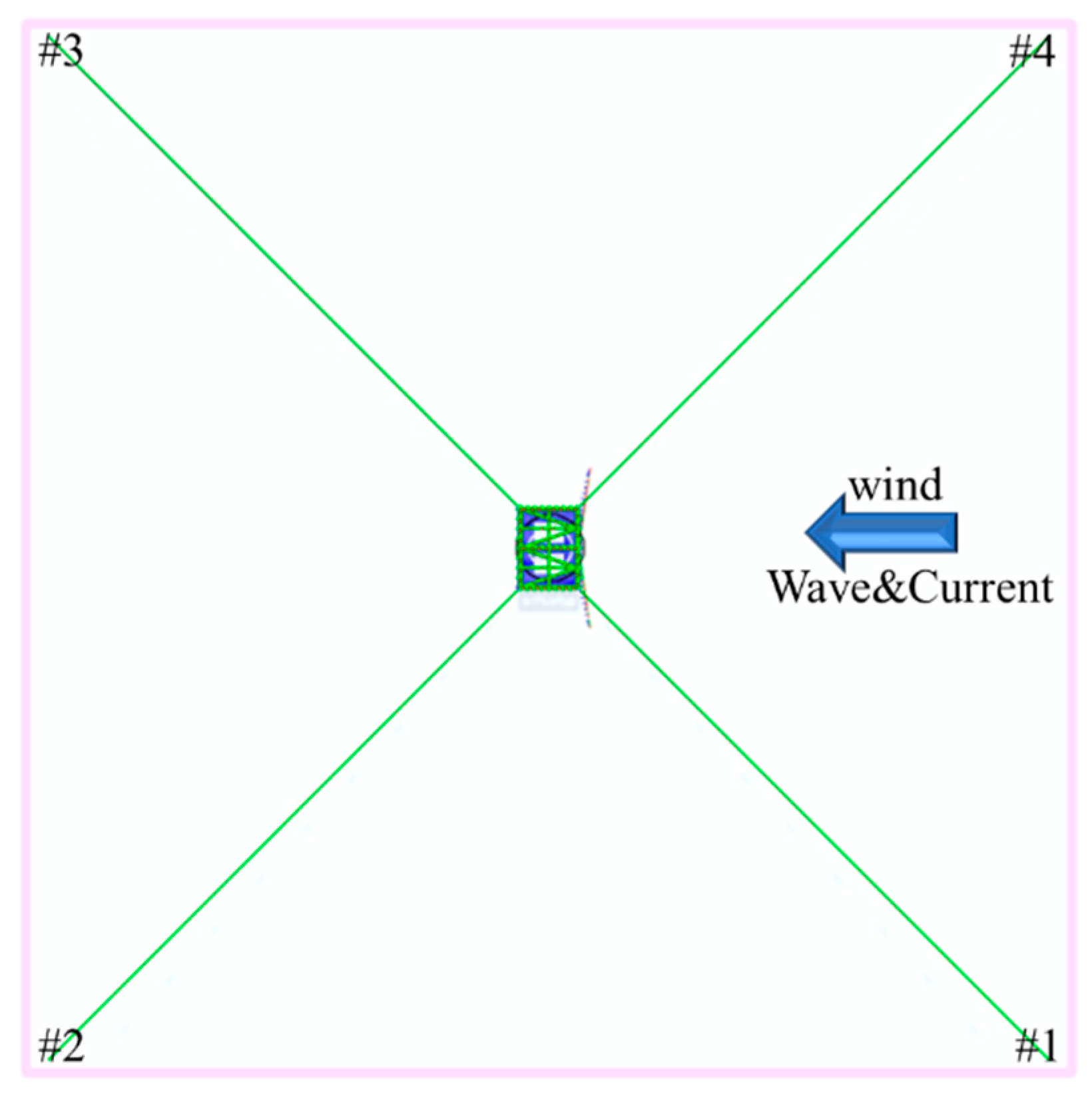
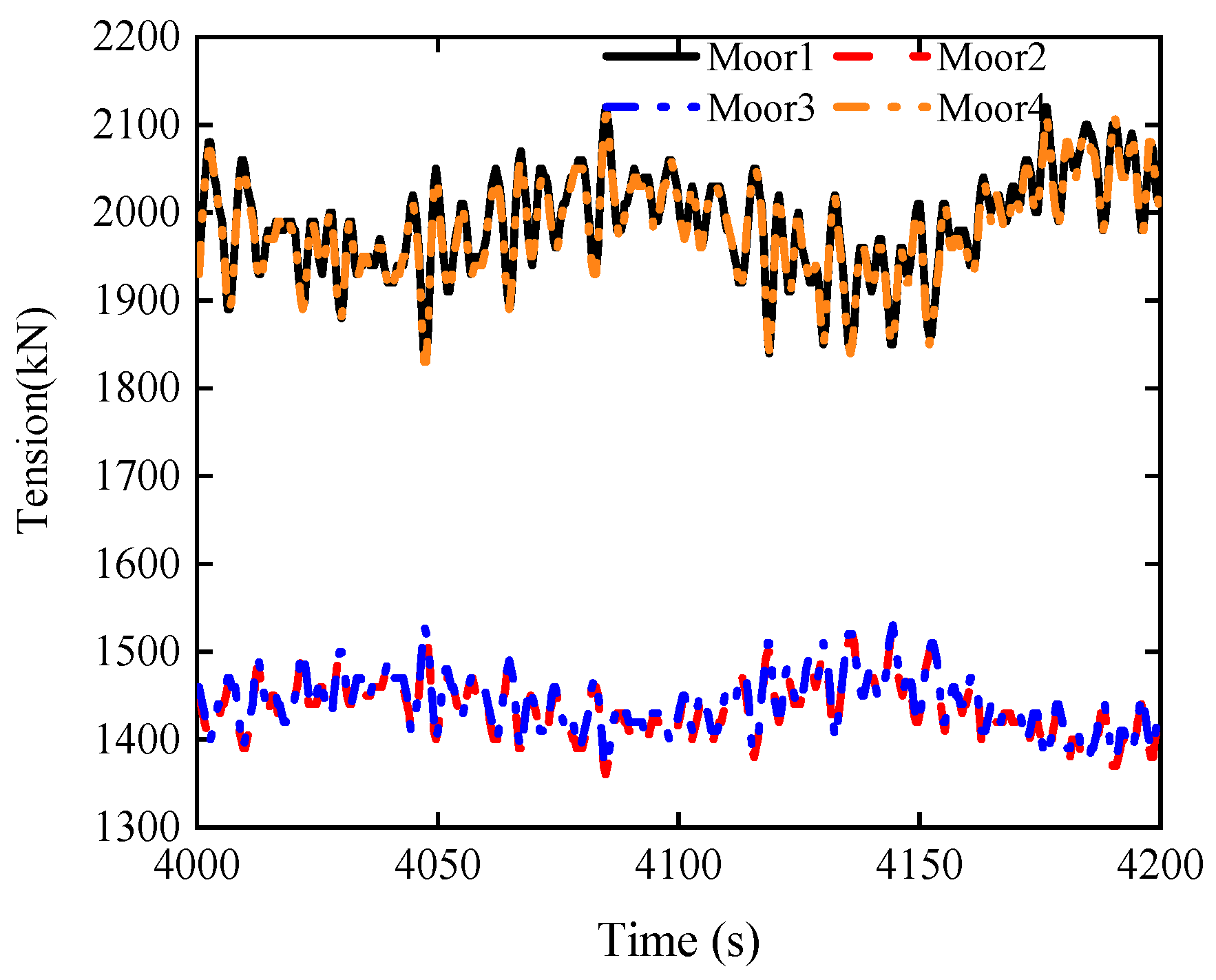
3.3. Mooring System Analysis
3.4. Environmental Conditions
4. Results and Discussion
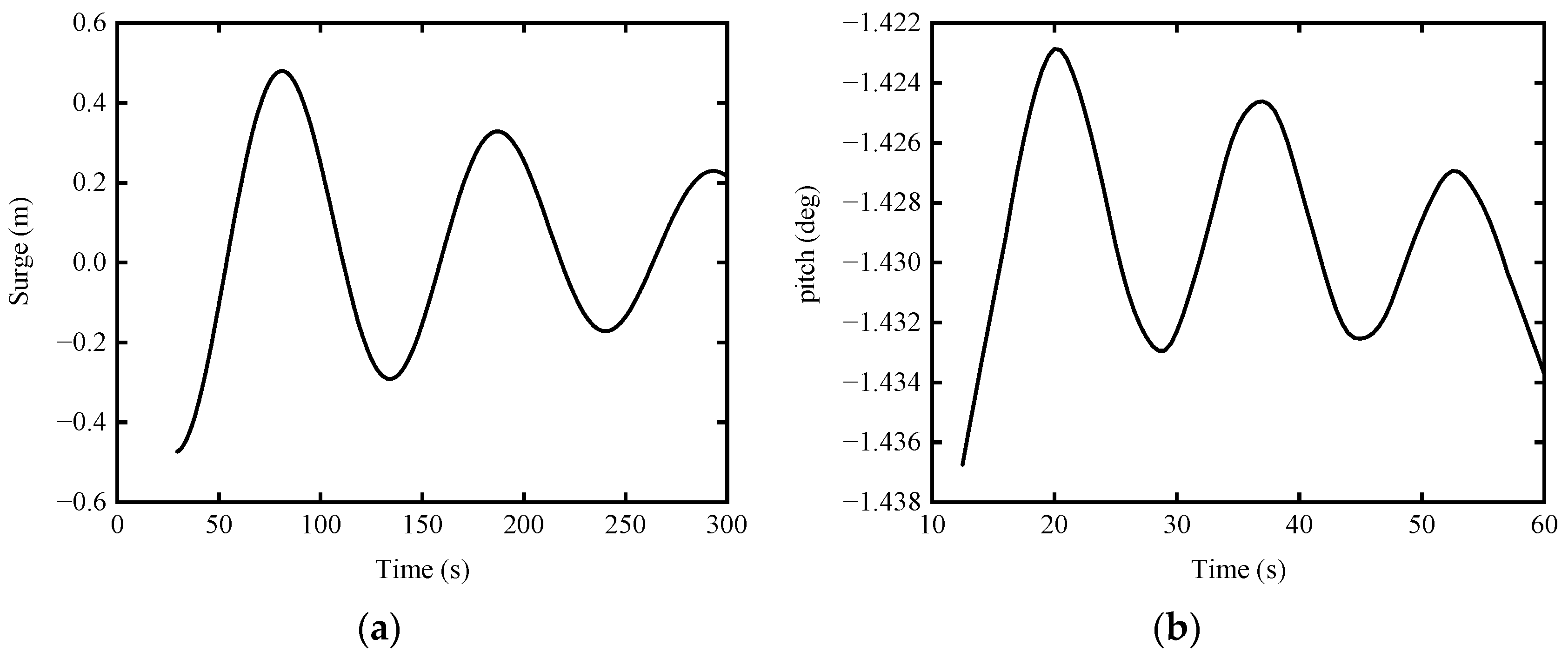
4.1. Free-Decay Simulation
4.2. Analysis of Motion Responses of Integrated Structure
4.3. Statistical Analysis of Motion Responses of Integrated Structure
5. Conclusions
- (1)
- The LSBT-FOWT-AC structure is proven to be rather stable by the stability analysis, and its natural periods of platform motion are not consistent with the typical wave frequency and rotor frequency (1P) by free-decay simulation. Therefore, the LSBT-FOWT-AC is well designed in terms of natural period requirements, avoiding structural vibrations excited by first-order wave loads and resonance caused by the 1P effect.
- (2)
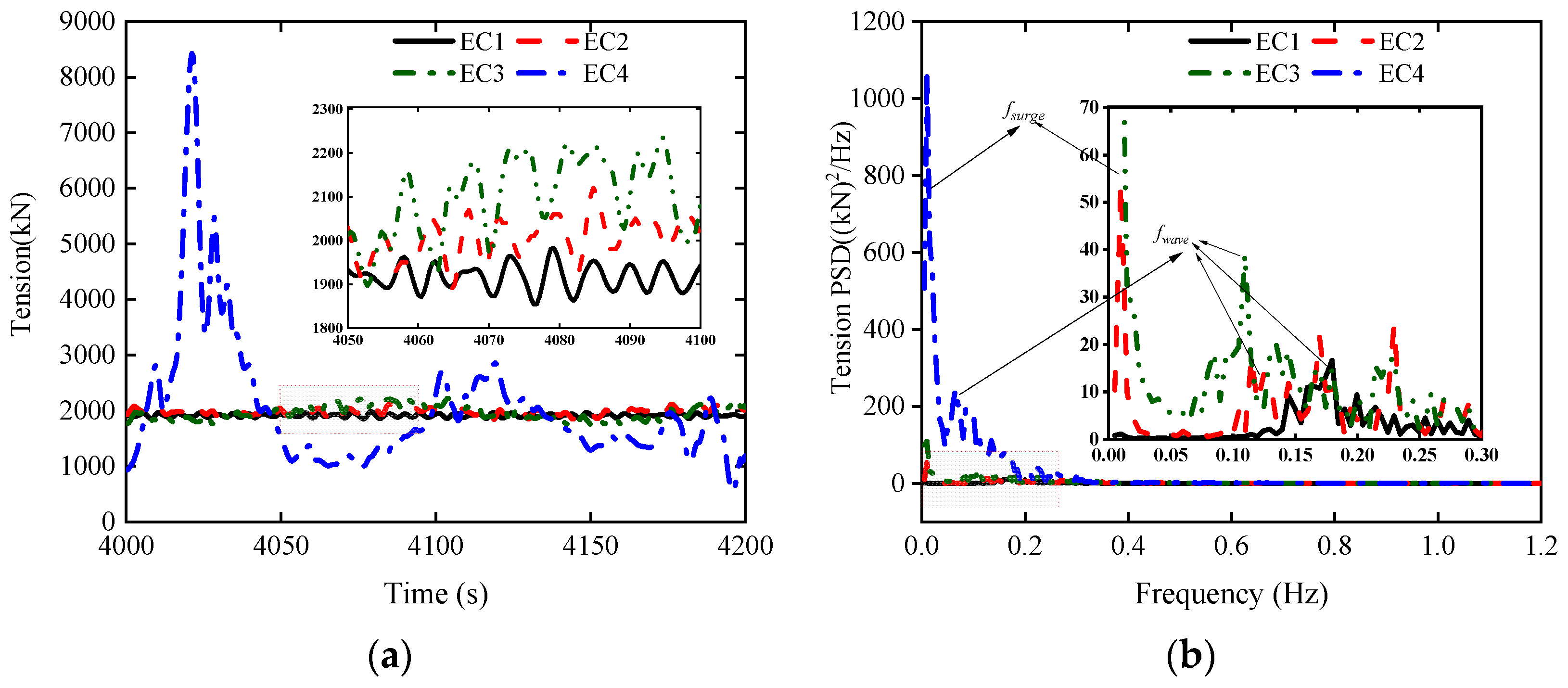
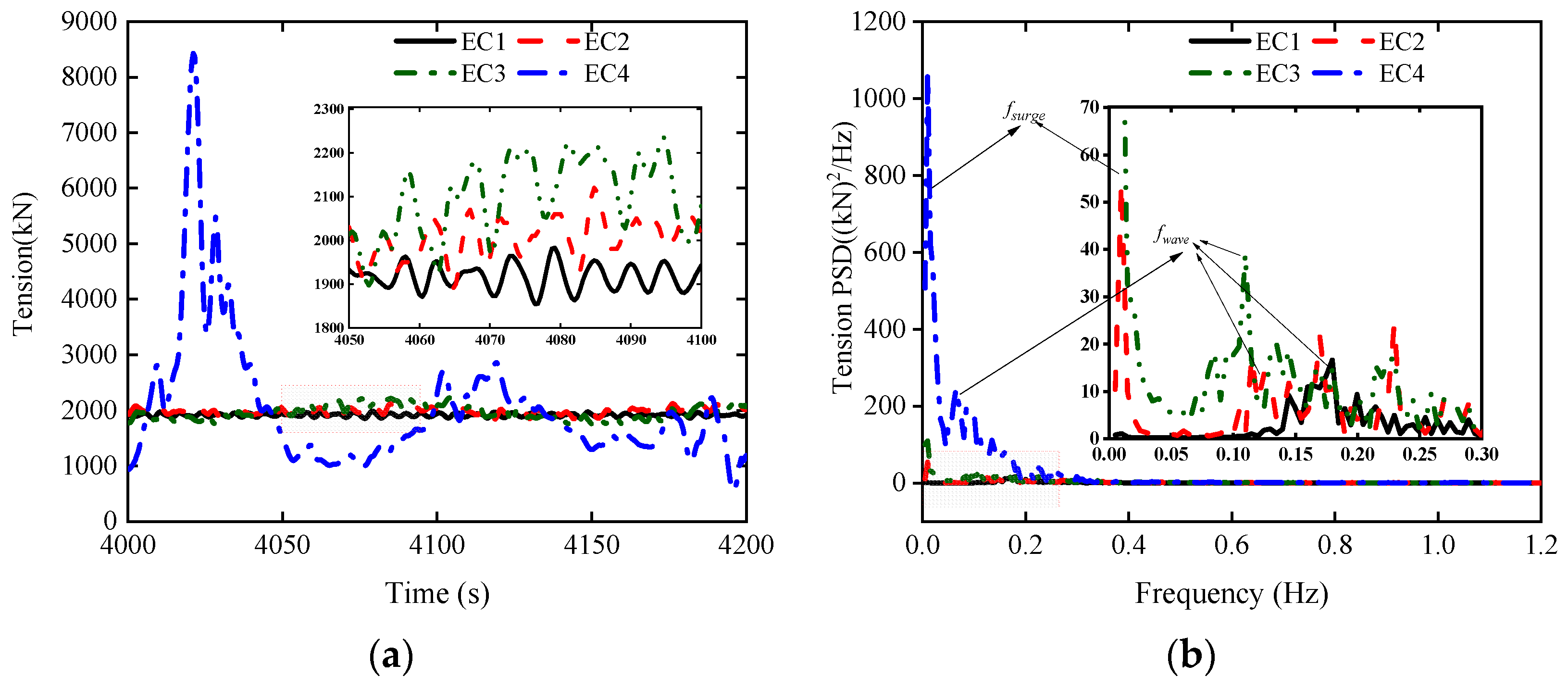
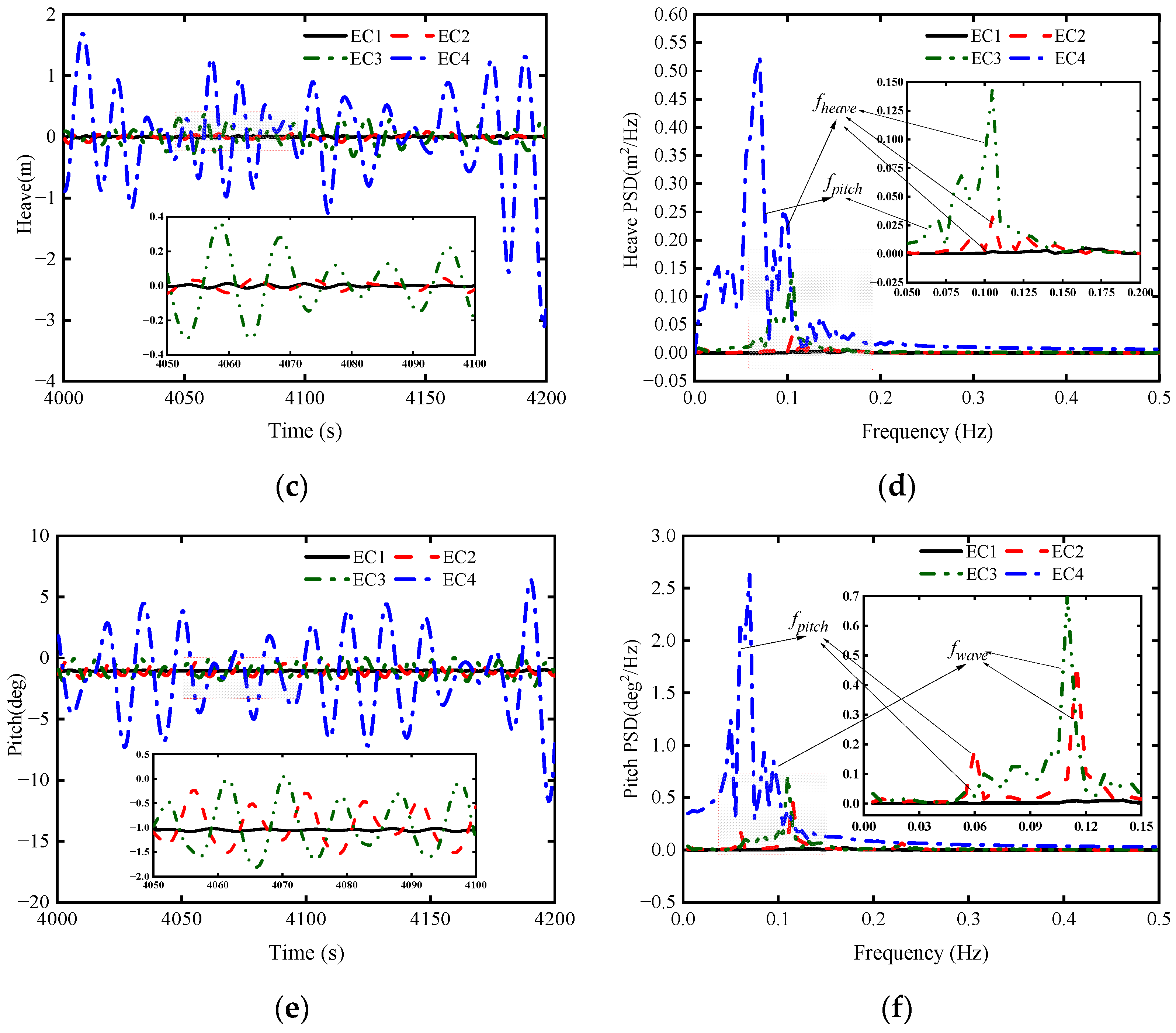
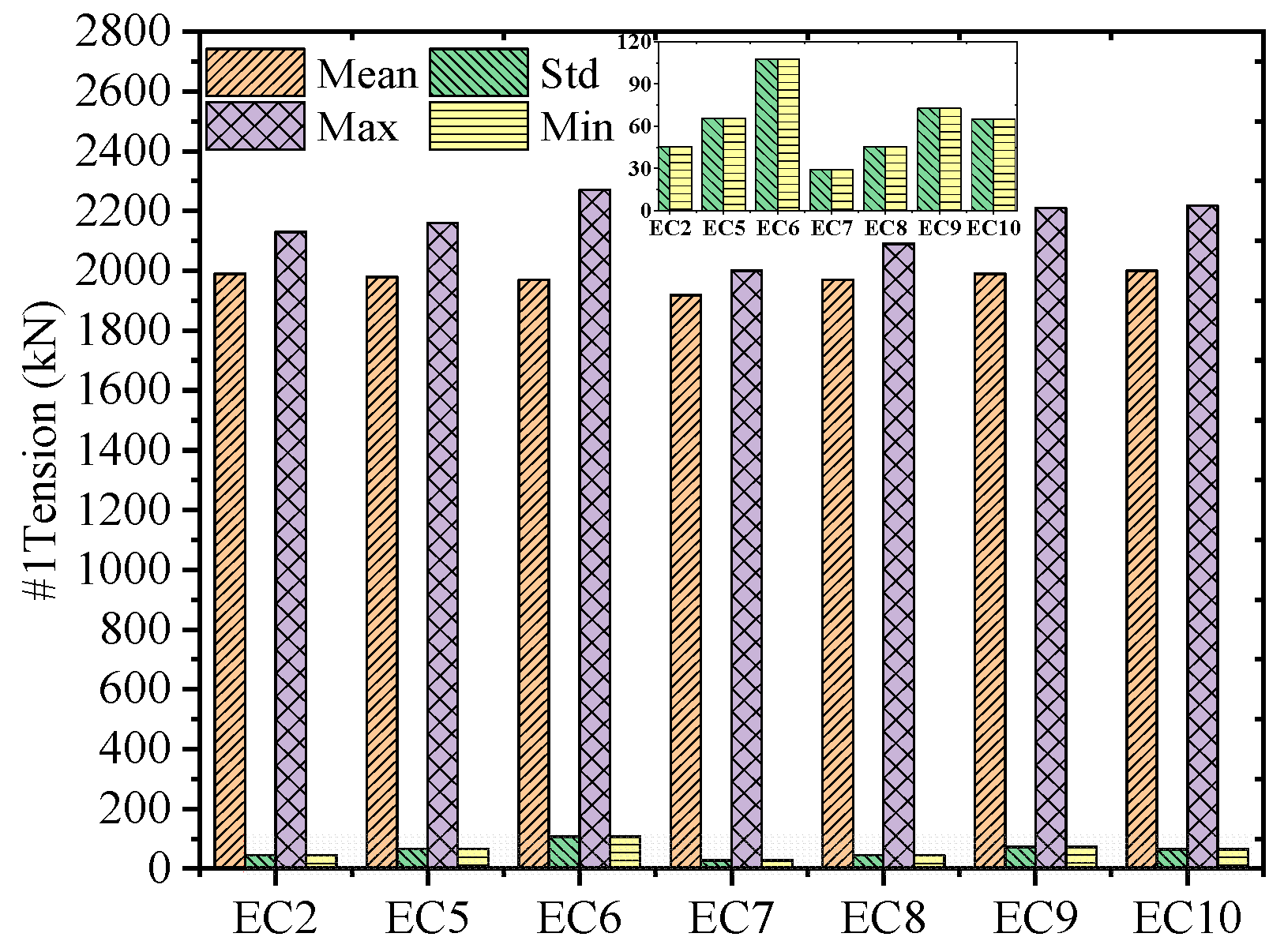
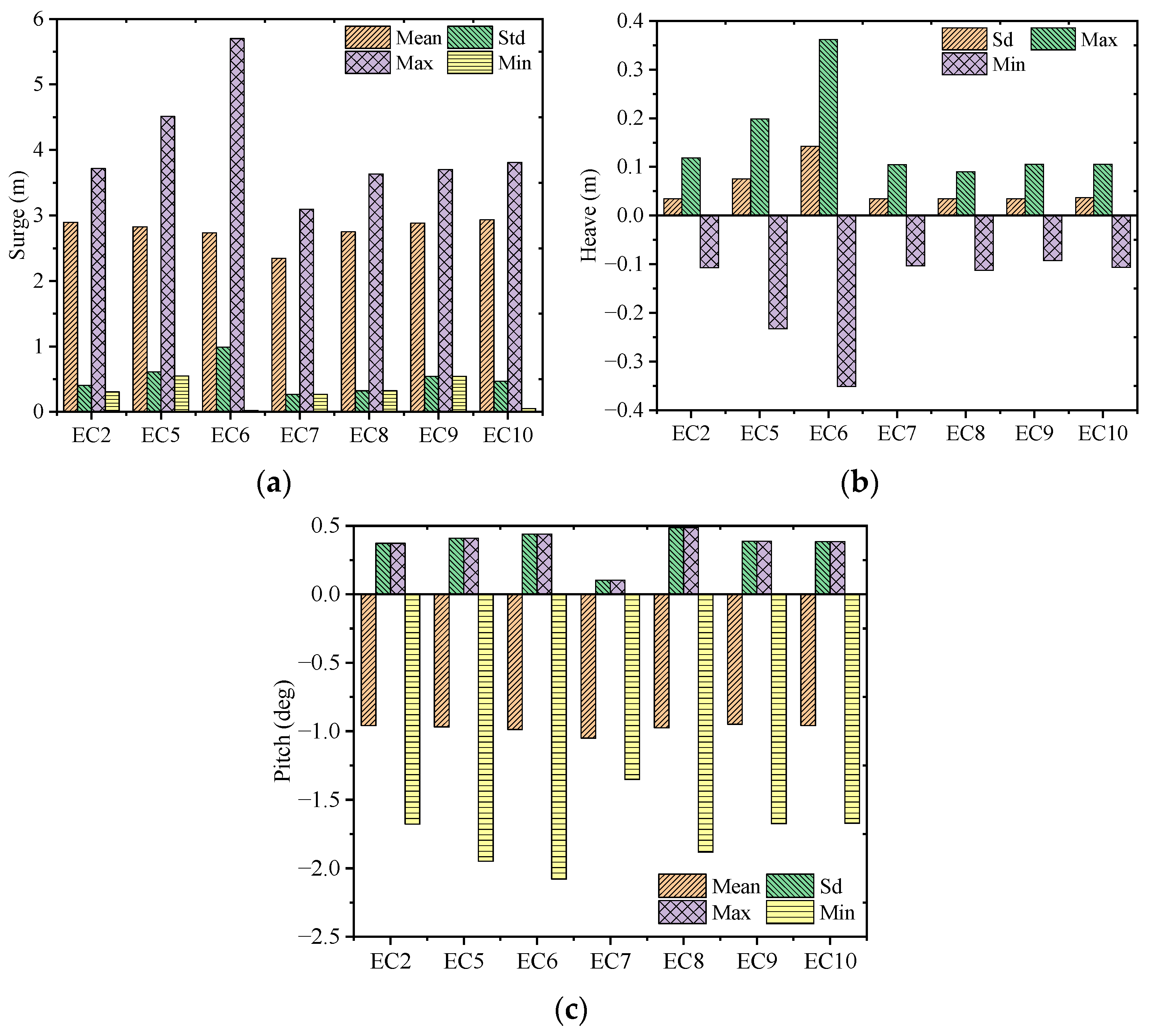
- The dynamic analysis results of the platform in the LSBT-FOWT-AC under various sea conditions are studied. Similar to the #1 tension, the surge motion of the platform fluctuates over a wider range as the wind speed and wave height increase. However, the fluctuation range of the platform heave is small, and a coupling effect between the heave and pitch motions is observed. Moreover, the stability of the platform’s pitch rotation is excellent, with the maximum pitch angle being within 2° under normal conditions and not exceeding 15° even in extreme sea conditions with a 100-year return period. In summary, the platform of the LSBT-FOWT-AC is greatly affected by wave frequency, and its motion response is within a reasonable range.
- (3)
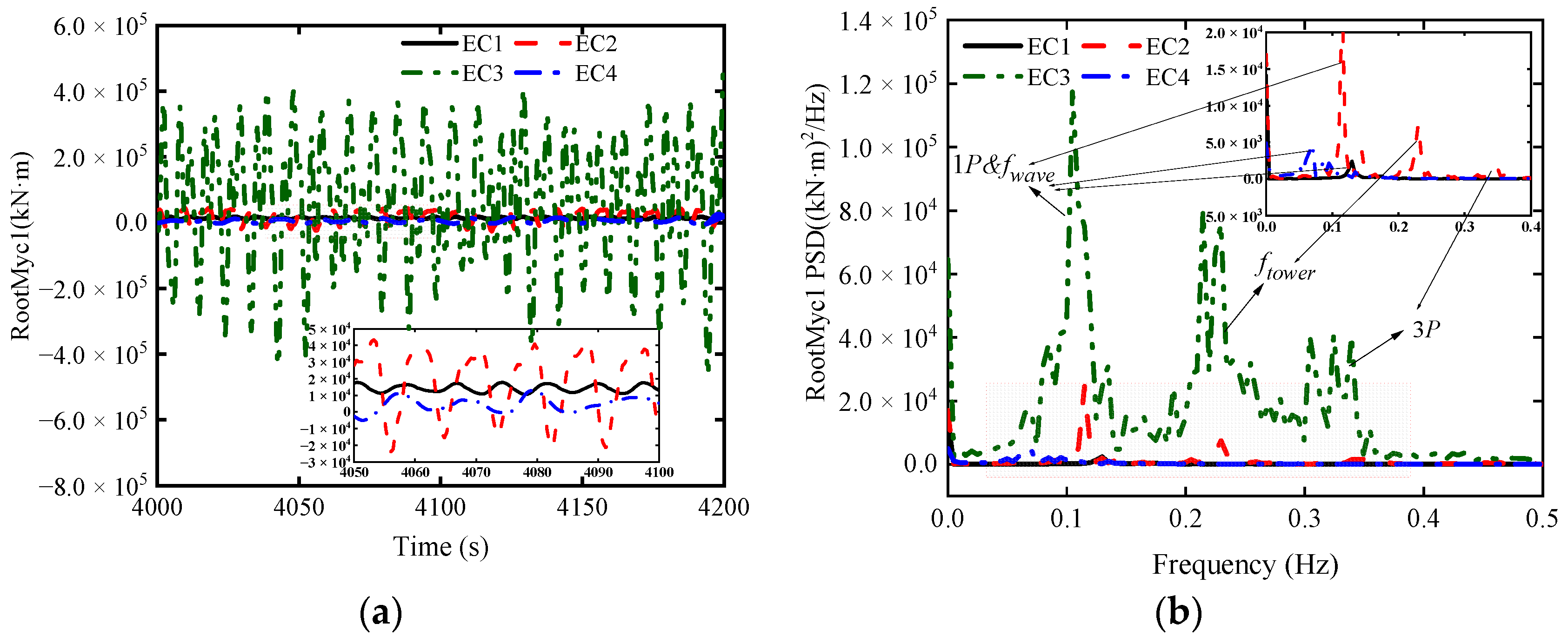
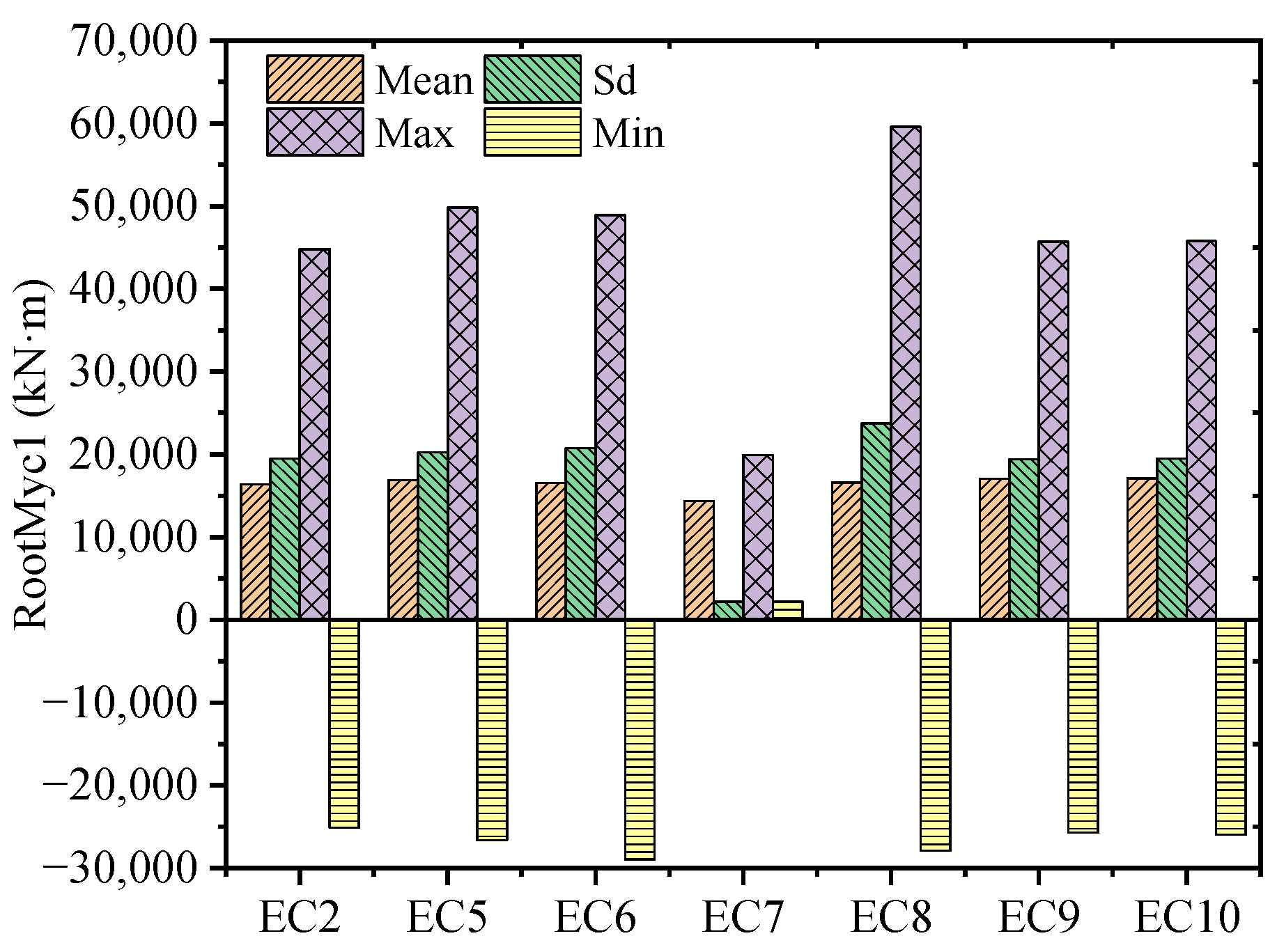
- From the results of RootMyc1 under various sea conditions, it can be found that when the wind speed is between the rated wind speed and the cut-in wind speed, the order of magnitude for the RootMyc1 is 104. When the wind speed exceeds the rated wind speed, the value of RootMyc1 increases rapidly and the order of magnitude rapidly reaches 105. It has peaks around the wave frequency, rotor frequency (1P), three rotor frequency (3P) and the natural frequency of the first tower mode. Therefore, it is important to avoid these frequency components when designing the LSBT-FOWT-AC structure.
- (4)
- Through the single-variable study of environmental loads, it is noted that wave height has an influence on the Max, Min and Std values of the platform motion; however, it has little effect on the mean value. These four statistics are all sensitive to changes in wind speed. Current speed has little effect on the motion response of the LSBT-FOWT-AC structure compared to wave height and wind speed. Mooring line tension is sensitive to environmental loads such as surge, while RootMyc1 is mainly affected by wind speed. In summary, wind speed has the greatest impact on the dynamic response of the LSBT-FOWT-AC.
6. Future Work
- (1)
- Considering the influence of the existence of the net on the LSBT-FOWT-AC structure;
- (2)
- Considering more complete environmental loads and operating conditions (e.g., fault conditions);
- (3)
- Ensuring that the LSBT-FOWT-AC system meets the design life through fatigue assessment.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Cao, Q.; Xiao, L.; Cheng, Z.; Liu, M. An Experimental Study on Dynamic Behavior of a New Concept of 10MW Semi-Submersible Wind Turbine. Ocean Eng. 2020, 232, 109138. [Google Scholar] [CrossRef]
- Leble, V.; Barakos, G. Demonstration of a Coupled Floating Offshore Wind Turbine Analysis with High-Fidelity Methods. J. Fluids Struct. 2016, 62, 272–293. [Google Scholar]
- Jonkman, J. Definition of the Floating System for Phase IV of OC3; No. NREL/TP-500-47535; National Renewable Energy Lab. (NREL): Golden, CO, USA, 2010. [Google Scholar]
- Robertson, A.; Jonkman, J.; Masciola, M.; Song, H.; Goupee, A.; Coulling, A.; Luan, C. Definition of the Semisubmersible Floating System for Phase II of OC4; No. NREL/TP-5000-60601; National Renewable Energy Lab. (NREL): Golden, CO, USA, 2014. [Google Scholar]
- Ren, Y.; Vengatesan, V.; Shi, W. Dynamic Analysis of a Multi-column TLP Floating Offshore Wind Turbine with Tendon Failure Scenarios. Ocean. Eng. 2022, 245, 110472. [Google Scholar]
- Ikoma, T.; Tan, L.; Moritsu, S.; Aida, Y.; Masuda, K. Motion Characteristics of a Barge-Type Floating Vertical-Axis Wind Turbine with Moonpools. Ocean. Eng. 2021, 230, 109006. [Google Scholar] [CrossRef]
- Ye, K.; Ji, J. Current, wave, wind and interaction induced dynamic response of a 5 MW spar-type offshore direct-drive wind turbine. Eng. Struct. 2019, 178, 395–409. [Google Scholar] [CrossRef]
- Soeb, M.R.; Islam, A.S.; Jumaat, M.Z.; Huda, N.; Arzu, F. Response of nonlinear offshore spar platform under wave and current. Ocean. Eng. 2017, 144, 296–304. [Google Scholar] [CrossRef]
- Tran, T.T.; Kim, D.H. The coupled dynamic response computation for a semi-submersible platform of floating offshore wind turbine. J. Wind. Eng. Ind. Aerodyn. 2015, 147, 104–119. [Google Scholar] [CrossRef]
- Bayati, I.; Gueydon, S.; Belloli, M. Study of the effect of water depth on potential flow solution of the OC4 semisubmersible floating offshore wind turbine. Energy Procedia 2015, 80, 168–176. [Google Scholar] [CrossRef]
- Oguz, E.; Clelland, D.; Day, A.H.; Incecik, A.; López, J.A.; Sánchez, G.; Almeria, G.G. Experimental and numerical analysis of a TLP floating offshore wind turbine. Ocean Eng. 2018, 147, 591–605. [Google Scholar] [CrossRef]
- Choisnet, T.; Favre, M.; Lyubimova, M.; Rogier, E. A Robust Concrete Floating Wind Turbine Foundation for Worldwide Applications. In Proceedings of the Grand Renewable Energy Conference, Tokyo, Japan, 27 July–1 August 2014; p. O-WdOc-2-7. [Google Scholar]
- Yang, C.; You, Z.; Bai, X.; Liu, Z.; Geng, J.; Johanning, L. Experimental and numerical analysis on the mooring tensions of the coupled tunnel-barge system in waves. Ocean Eng. 2021, 235, 109417. [Google Scholar] [CrossRef]
- Chuang, T.; Yang, W.; Jinang, R.Y. Experimental and Numerical Study of a Barge-Type FOWT Platform Under Wind and Wave Load. Ocean Eng. 2021, 230, 109015. [Google Scholar] [CrossRef]
- Yang, Y.; Bashir, M.; Li, C.; Wang, J. Investigation on Mooring Breakage Effects of a 5 MW Barge-Type Floating Offshore Wind Turbine Using F2A. Ocean Eng. 2021, 233, 108887. [Google Scholar] [CrossRef]
- Kosasih, K.M.A.; Niizato, H.; Okubo, S.; Mitani, S.; Suzuki, H. Wave tank experiment and coupled simulation analysis of barge-type offshore wind turbine. In Proceedings of the 29th International Ocean and Polar Engineering Conference, Honolulu, HI, USA, 6–21 June 2019. [Google Scholar]
- Bak, C.; Zahle, F.; Bitsche, R.; Kim, T.; Yde, A.; Henriksen, L.C.; Hansen, M.H.; Blasques, J.P.A.A.; Gaunaa, M.; Natarajan, A. The DTU 10-MW reference wind turbine. Dan. Wind. Power Res. 2013, 2013. [Google Scholar]
- Si, Y.; Karimi, H.R.; Gao, H. Modelling and optimization of a passive structural control design for a spar-type floating wind turbine. Eng. Struct. 2014, 69, 168–182. [Google Scholar] [CrossRef]
- Zhao, Z.; Shi, W.; Wang, W.; Qi, S.; Li, X. Dynamic analysis of a novel semi-submersible platform for a 10 MW wind turbine in intermediate water depth. Ocean Eng. 2021, 237, 109688. [Google Scholar] [CrossRef]
- Ferri, G.; Marino, E.; Borri, C. Optimal dimensions of a semisubmersible floating platform for a 10 MW wind turbine. Energies 2020, 13, 3092. [Google Scholar] [CrossRef]
- Ahn, H.; Shin, H. Experimental and Numerical Analysis of a 10 MW Floating Offshore Wind Turbine in Regular Waves. Energies 2020, 13, 2608. [Google Scholar]
- Jin, J.; Su, B.; Dou, R.; Luan, C.; Gao, Z. Numerical Modelling of Hydrodynamic Responses of Ocean Farm 1 in Waves and Current and Validation Against Model Test Measurements. Mar. Struct. 2021, 78, 103017. [Google Scholar] [CrossRef]
- Zhao, Y.-P.; Bi, C.-W.; Dong, G.-H.; Gui, F.-K.; Cui, Y.; Guan, C.-T.; Xu, T.-J. Numerical simulation of the flow around fishing plane nets using the porous media model. Ocean Eng. 2013, 62, 25–37. [Google Scholar] [CrossRef]
- Bi, C.-W.; Zhao, Y.-P.; Dong, G.-H.; Wu, Z.-M.; Zhang, Y.; Xu, T.-J. Drag on and flow through the hydroid-fouled nets in currents. Ocean Eng. 2018, 161, 195–204. [Google Scholar]
- Dong, G.-H.; Tang, M.-F.; Xu, T.-J.; Bi, C.-W.; Guo, W.-J. Experimental analysis of the hydrodynamic force on the net panel in wave. Appl. Ocean Res. 2019, 87, 233–246. [Google Scholar] [CrossRef]
- Li, L.; Ong, M.C. A Preliminary Study of a Rigid Semi-Submersible Fish Farm for Open Seas. In Proceedings of the International Conference on Offshore Mechanics and Arctic Engineering. (American Society of Mechanical Engineers, 2017), Trondheim, Norway, 25–30 June 2017; p. V009T12A044. [Google Scholar]
- Lei, Y.; Zhao, S.X.; Zheng, X.Y.; Li, W. Effects of Fish Nets on the Nonlinear Dynamic Performance of a Floating Offshore Wind Turbine Integrated with a Steel Fish Farming Cage. Int. J. Struct. Stab. Dyn. 2020, 20, 2050042. [Google Scholar] [CrossRef]
- Liang, L.; Ruzzo, C.; Collu, M.; Gao, Y.; Arena, F. Analysis of the Coupled Dynamic Response of an Offshore Floating Multi-Purpose Platform for the Blue Economy. Ocean Eng. 2020, 217, 107943. [Google Scholar]
- Abhinav, K.A.; Collu, M.; Ke, S.; Binzhen, Z. Frequency Domain Analysis of a Hybrid Aquaculture-Wind Turbine Offshore Floating System. In Proceedings of the ASME 2019 38th International Conference on Ocean, Offshore and Arctic Engineering, Scotland, UK, 9–14 June 2019; Volume 58837, p. V006T05A024. [Google Scholar]
- Zhai, Y.; Zhao, H.; Li, X.; Shi, W. Hydrodynamic Responses of a Barge-Type Floating Offshore Wind Turbine Integrated with an Aquaculture Cage. J. Mar. Sci. Eng. 2022, 10, 854. [Google Scholar]
- Zhang, Y.; Shi, W.; Li, D.; Li, X.; Duan, Y.; Verma, A.S. A novel framework for modeling floating offshore wind turbines based on the vector form intrinsic finite element (VFIFE) method. Ocean Eng. 2022, 262, 112221. [Google Scholar] [CrossRef]
- Newman, J.N. Marine Hydrodynamics; The MIT Press: Cambridge, MA, USA, 2018. [Google Scholar]
- Manwell, J.F.; McGowan, J.G.; Rogers, A.L. Wind Energy Explained: Theory, Design and Application; John Wiley & Sons: Hoboken, NJ, USA, 2010. [Google Scholar]
- Shi, W.; Zhang, L.; Karimirad, M.; Michailides, C.; Jiang, Z.; Li, X. Combined effects of aerodynamic and second-order hydrodynamic loads for three semisubmersible floating wind turbines in different water depths. Appl. Ocean Res. 2023, 130, 103416. [Google Scholar] [CrossRef]
- Hansen, M.O.L.; Sørensen, J.N.; Voutsinas, S.; Madsen, H.A. State of the art in wind turbine aerodynamics and aeroelasticity. Prog. Aerosp. Sci. 2006, 42, 285–330. [Google Scholar]
- Cai, Y.; Zhao, H.; Li, X.; Liu, Y. Effects of yawed inflow and blade-tower interaction on the aerodynamic and wake characteristics of a horizontal-axis wind turbine. Energy. 2022, 264, 126246. [Google Scholar] [CrossRef]
- Hess, J.; Smith, A. Calculation of potential flow about arbitrary bodies. Prog. Aerosp. Sci. 1967, 8, 1–138. [Google Scholar] [CrossRef]
- Morison, J.R.; O’Brien, M.P.; Johnson, J.W.; Schaaf, S.A. The forces exerted by surface waves on piles. Pet. Trans. AIME 1950, 2, 149–154. [Google Scholar]
- SESAM User Manual, HydroD v4.10. In Wave Load & Stability Analysis of Fixed and Floating Structures; SESAM User Manual: Copenhagen, Denmark, 2017.
- Jean-Pierre, M. MIMOSA User’s Manual (Draft Version 1.4. 0). 2012. Available online: https://ur-green.cirad.fr/content/download/4394/33071/version/1/file/UsersManual.v9.pdf (accessed on 28 September 2022).
- Forchı, V.; Bierwirth, T.; Péron, M. Reflex User Manual. VLT-MAN-ESO-19000-5037. Issue 0.7. 2018. Available online: https://ftp.eso.org/pub/dfs/reflex/EsoReflexUserManual-3.9.pdf (accessed on 28 September 2022).
- DNV, DNVGL-OS-C301 Stability and Watertight Integrity, July 2020. Available online: https://rules.dnvgl.com/docs/pdf/DNVGL/OS/2020-07/DNVGL-OS-C301.pdf (accessed on 8 October 2020).
- DNV GL. DNVGL-RP-0286: Coupled analysis of floating wind turbines. In Recommend Practice DNVGL-RP-0286; DNV GL: Oslo, Norway, 2019. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value |
|---|---|
| Wind Regime | IEC class 1 A |
| Cut-in wind speed (m/s) | 4.0 |
| Rated wind speed (m/s) | 11.4 |
| Cut-out wind speed (m/s) | 25.0 |
| Rotor diameter (m) | 178.3 |
| Hub height (m) | 119.0 |
| Shaft tilt angle (deg) | 5.0 |
| Accumulated mass of three blades (kg) | 230,667 |
| Nacelle mass (kg) | 446,036 |
| Tower mass (kg) | 591,758 |
| Rotor frequency (1P, Hz) | 0.1–0.16 |
| Natural frequency of 1st tower mode (Hz) | 0.25 |
| Parameters | Value |
|---|---|
| Barge size (W × L × H) (m) | 80 × 60 × 17 |
| Moon pool (W × L × H) (m) | 20 × 30 × 17 |
| Draft (m) | 12 |
| Mass (kg) | 8,471,280 |
| COG (m) | (0.574, 0, −5.18) |
| Roll inertia (kg/m3) | 1.40 × 1010 |
| Pitch inertia (kg/m3) | 2.55 × 1010 |
| Yaw inertia (kg/m3) | 3.59 × 1010 |
| Parameters | Value |
|---|---|
| Diameter of side column and diagonal column (m) | 3.5 |
| Diameter of diagonal column (m) | 2 |
| Thickness of the side column and diagonal column (m) | 0.02 |
| Height (m) | 30 |
| Parameters | Value |
|---|---|
| Unstretched line length (m) | 620 |
| Diameter of each mooring line (m) | 0.153 |
| Line mass density in water (kg/m) | 401 |
| Line type | R4-Studless |
| External area of each mooring line(m2) | 0.059 |
| Elastic stiffness, EA (kN) | 3.7789 × 106 |
| Breaking loads (kN) | 20,156 |
| Wind Speed (m/s) | Hs (m) | Tp (m) | Current Speed (m/s) | Turbine Status | |
|---|---|---|---|---|---|
| EC1 | 6 | 2.50 | 6 | 0.81 | Operating |
| EC2 | 11.4 | 3.52 | 7.9 | 0.81 | Operating |
| EC3 | 16 | 6.85 | 9.4 | 0.81 | Operating |
| EC4 | 40 | 14 | 14.5 | 0.81 | Shutdown |
| EC5 | 11.4 | 5.55 | 8.8 | 0.81 | Operating |
| EC6 | 11.4 | 6.85 | 9.4 | 0.81 | Operating |
| EC7 | 6 | 3.52 | 7.9 | 0.81 | Operating |
| EC8 | 16 | 3.52 | 7.9 | 0.81 | Operating |
| EC9 | 11.4 | 3.52 | 7.9 | 0 | Operating |
| EC10 | 11.4 | 3.52 | 7.9 | 2 | Operating |
| Motion | Natural Period | Natural Frequency |
|---|---|---|
| Surge | 106 s | 0.0094 Hz |
| Heave | 10 s | 0.1 Hz |
| Pitch | 16.5 s | 0.0606 Hz |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhai, Y.; Zhao, H.; Li, X.; Shi, W. Design and Dynamic Analysis of a Novel Large-Scale Barge-Type Floating Offshore Wind Turbine with Aquaculture Cage. J. Mar. Sci. Eng. 2022, 10, 1926. https://doi.org/10.3390/jmse10121926
Zhai Y, Zhao H, Li X, Shi W. Design and Dynamic Analysis of a Novel Large-Scale Barge-Type Floating Offshore Wind Turbine with Aquaculture Cage. Journal of Marine Science and Engineering. 2022; 10(12):1926. https://doi.org/10.3390/jmse10121926
Chicago/Turabian StyleZhai, Yuting, Haisheng Zhao, Xin Li, and Wei Shi. 2022. "Design and Dynamic Analysis of a Novel Large-Scale Barge-Type Floating Offshore Wind Turbine with Aquaculture Cage" Journal of Marine Science and Engineering 10, no. 12: 1926. https://doi.org/10.3390/jmse10121926
APA StyleZhai, Y., Zhao, H., Li, X., & Shi, W. (2022). Design and Dynamic Analysis of a Novel Large-Scale Barge-Type Floating Offshore Wind Turbine with Aquaculture Cage. Journal of Marine Science and Engineering, 10(12), 1926. https://doi.org/10.3390/jmse10121926