
Development of a Structural-Functional Approach for Heterogeneous Glider-Type Marine Robotic Complexes’ Group Interaction to Solve Environmental Monitoring and Patrolling Problems

 , , ,
, , ,
Abstract
1. Introduction
2. The Problem Statement
- Ensuring a sufficient distance between objects, which allows maintaining an operational communication channel;
- Setting up the intra-group logic for vehicles’ action planning in case of unforeseen situations;
- Maintaining the group while the group is moving.
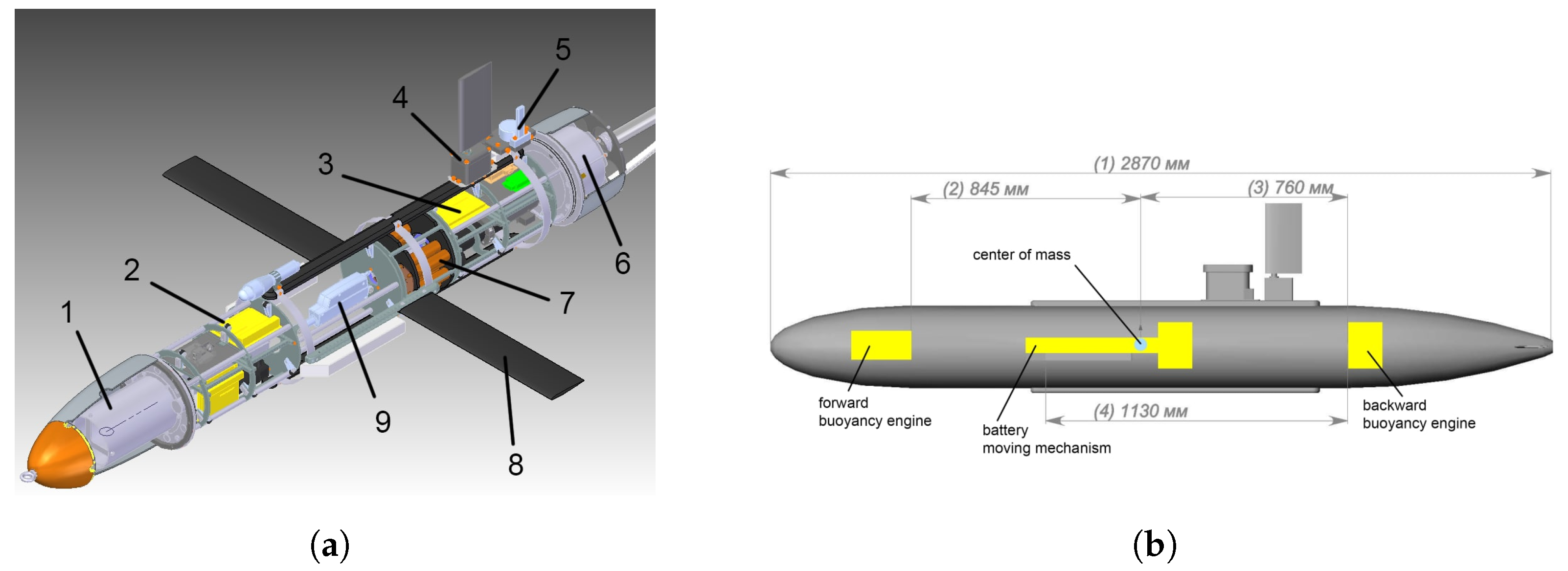
SHADOW Underwater Glider Model
3. Development of a Group Interaction System
- moves in horizontal plane;
- overcomes the strong current zones (overcomes the thermocline);
- needs functionality and maneuverability improvement in order to overcome obstacles as well.
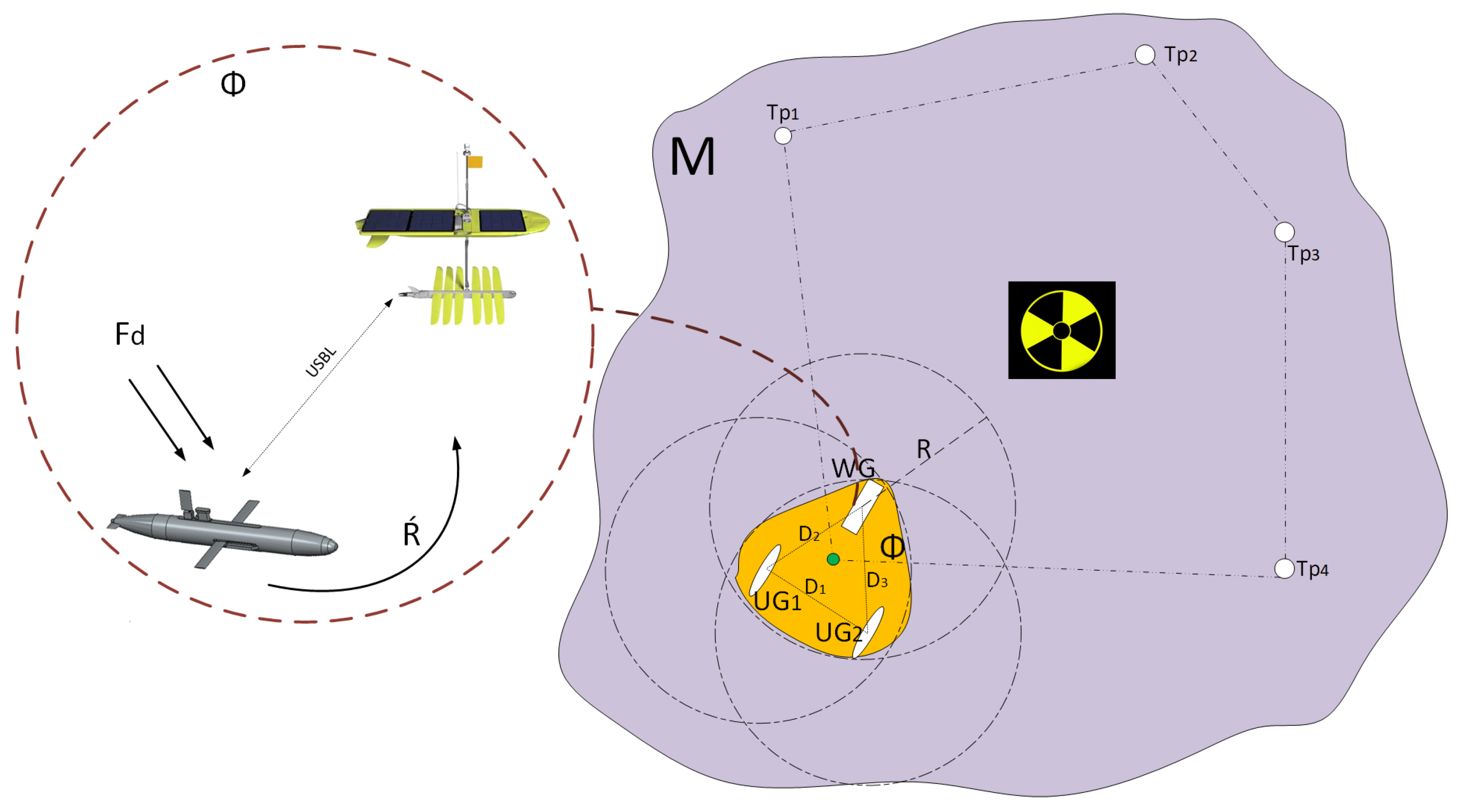
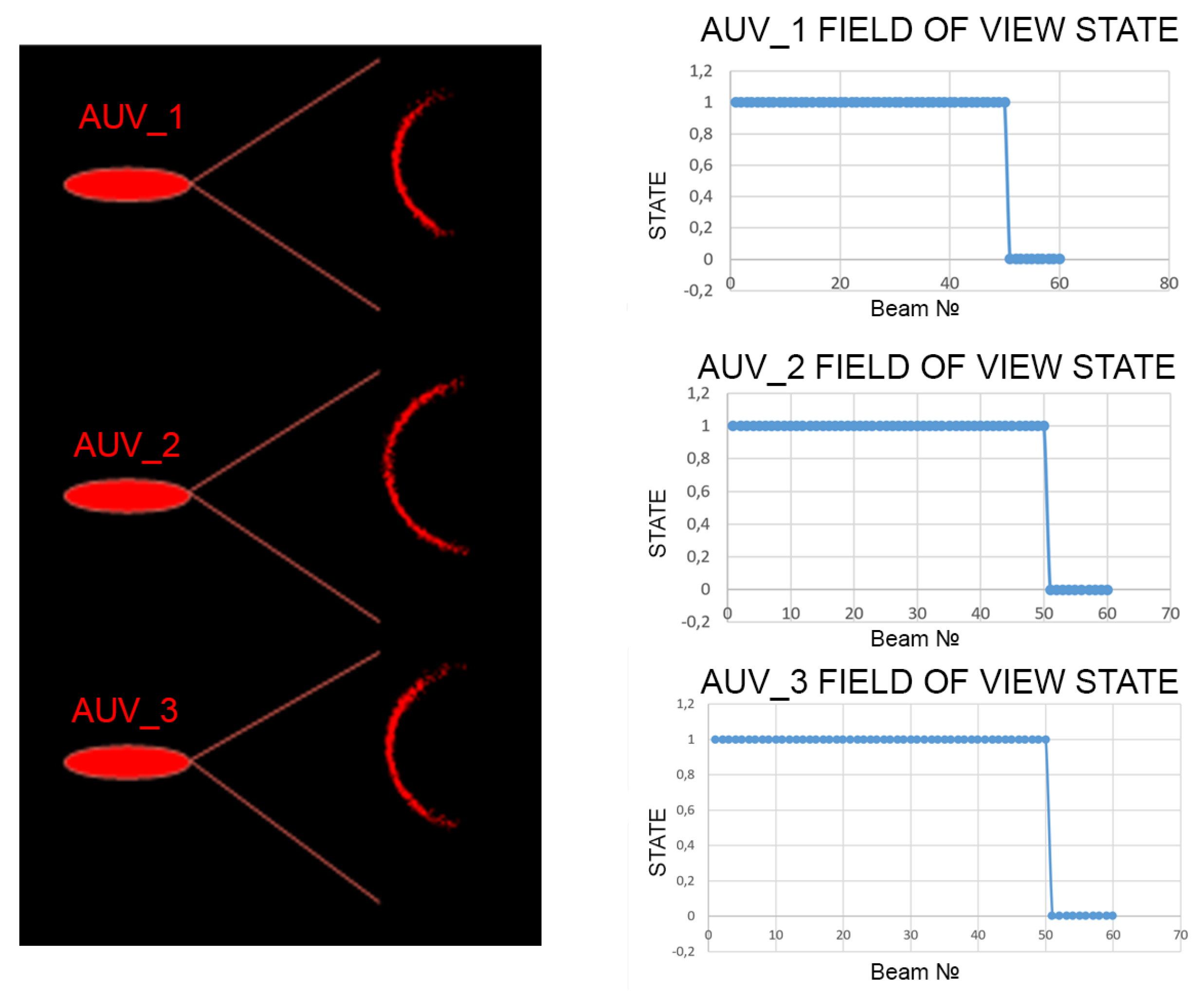
Development of an Algorithm for a Single Field of View of the MRC Group
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Wagawa, T.; Igeta, Y.; Honda, N.; Abe, S.; Ito, M.; Okunishi, T.; Hasegawa, D.; Kakehi, S.; Setou, T.; Shimizu, Y. Hydrographic observations in the Japan Sea with an underwater glider. In Proceedings of the 2016 Techno-Ocean (Techno-Ocean), Kobe, Japan, 6–8 October 2016; pp. 595–598. [Google Scholar] [CrossRef]
- Testor, P.; Meyers, G.; Pattiaratchi, C.; Bachmayer, R.; Hayes, D.; Pouliquen, S.; Villeon, L.; Carval, T.; Ganachaud, A.; Gourdeau, L.; et al. Gliders as a Component of Future Observing Systems. In Proceedings of the OceanObs’09: Sustained Ocean Observations and Information for Society, Venice, Italy, 21–25 September 2009; Hall, J., Harrison, D.E., Stammer, D., Eds.; ESA Publication: Venice, Italy, 2009; Volume 2. [Google Scholar] [CrossRef]
- Kozhemyakin, I.; Rozhdestvenskij, K.; Ryzhov, V. Underwater gliders: Yesterday, today, tomorrow (part 1). Mar. Bull. 2013, 1, 113–177. [Google Scholar]
- Kozhemyakin, I.; Rozhdestvenskij, K.; Ryzhov, V. Underwater gliders: Yesterday, today, tomorrow (part 2). Mar. Bull. 2013, 2, 98–101. [Google Scholar]
- Gajkovich, B.; Zanin, V. Issues of creating a family of marine gliders as elements of a global maritime security system. In Proceedings of the IX All-Russian Scientific and Practical Conference “Advanced Systems and Control Problems”, Krasnaya Polyana, Sochi, Russia, 7–11 April 2014; pp. 211–218. [Google Scholar]
- Gajkovich, B.; Zanin, V.; Kozhemyakin, I. Issues of development of marine robotic platforms on the example of the creation of the underwater vehicle “Glider”. In Proceedings of the XI All-Russian Scientific and Practical Conference “Advanced Systems and Control Problems”, Rostov on Don, Russia, 6–8 April 2016; pp. 151–163. [Google Scholar]
- Chang, D.; Zhang, F.; Edwards, C. Real-Time Guidance of Underwater Gliders Assisted by Predictive Ocean Models. J. Atmos. Ocean. Technol. 2015, 32, 562–578. [Google Scholar] [CrossRef]
- Testor, P.; Mortier, L.; Lheveder, B.; Taillandier, V.; Send, U.; Smeed, D.; Merckelbach, L.; Alvarez, A.; Tintore, J.; Casas, B.; et al. Regional in-situ observatory: Glider observations in the northwestern Mediterranean Sea in winter 2008 (EGO). In Proceedings of the GODAE Final Symposium, Nice, France, 12–15 November 2008. [Google Scholar]
- Lee, C.; Melling, H.; Eicken, H.; Schlosser, P.; Gascard, J.C.; Proshutinsky, A.; Fahrbach, E.; Mauritzen, C.; Morison, J.; Polykov, I. Autonomous Platforms in the Arctic Observing Network. In Proceedings of the OceanObs’09: Sustained Ocean Observations and Information for Society (Volume 2), Venice, Italy, 21–25 September 2009; Hall, J., Harrison, D.E., Stammer, D., Eds.; ESA Publication: Venice, Italy, 2009. WPP-306. [Google Scholar] [CrossRef]
- Perry, M.J.; Briggs, N.; Gray, A.; Lee, C.; Rehm, E.; D’Asaro, E.; Gudmundsson, K.; Kallin, E.; Lampitt, R.; Poulton, N.; et al. Optical observations of large diatoms and sinking particles during the North Atlantic Spring Bloom made from seagliders, floats and a ship. In Proceedings of the Ocean Optics XIX, Barga, Italy, 6–10 October 2008; pp. 38–40. [Google Scholar]
- McMillan, J. Autonomous Underwater Vehicle Operations in the Arctic. In Proceedings of the OTC Arctic Technology Conference, Copenhagen, Denmark, 23–25 March 2015. Paper Number: OTC-25543-MS. [Google Scholar] [CrossRef]
- Glenn, S.; Jones, C.; Twardowski, M.; Bowers, L.; Kerfoot, J.; Kohut, J.; Webb, D.; Schofield, O. Glider Observations of Sediment Resuspension in a Middle Atlantic Bight Fall Transition Storm. Limnol. Oceanogr. 2008, 53, 2180–2196. [Google Scholar] [CrossRef]
- Maevskij, A.; Gajkovich, B. Development of hybrid autonomous uninhabited vehicles for the exploration of hydrocarbon deposits. News Gas Sci. 2019, 2, 29–40. Available online: https://cyberleninka.ru/article/n/razrabotka-gibridnyh-avtonomnyh-neobitaemyh-apparatov-dlya-issledovaniya-mestorozhdeniy-uglevodorodov/viewer (accessed on 1 October 2022).
- The Use of Underwater Gliders for Geological Exploration. Robo Trends. 2018. Available online: http://robotrends.ru/pub/1837/primenenie-podvodnyh-glayderov-dlya-geologorazvedki (accessed on 9 July 2022).
- Dassatti, A.; Schaar, M.; Guerrini, P.; Zaugg, S.; Houegnigan, L.; Maguer, A.; André, M. On-board underwater glider real-time acoustic environment sensing. In Proceedings of the OCEANS 2011 IEEE, Santander, Spain, 6–9 June 2011; pp. 1–8. [Google Scholar] [CrossRef]
- Cauchy, P.; Heywood, K.; Queste, B.; Merchant, N.; Risch, D.; Testor, P. Passive Acoustic Monitoring from ocean gliders. In Proceedings of the 20-th EGU General Assembly, EGU2018, Vienna, Austria, 4–13 April 2018; p. 430. [Google Scholar]
- Küsel, E.; Munoz, T.; Siderius, M.; Mellinger, D.; Heimlich, S. Marine mammal tracks from two-hydrophone acoustic recordings made with a glider. Ocean. Sci. Discuss. 2016, 13, 273–288. [Google Scholar] [CrossRef]
- Olmstead, T.J.; Roch, M.A.; Hursky, P.; Porter, M.B.; Klinck, H.; Mellinger, D.K.; Helble, T.; Wiggins, S.S.; D’Spain, G.L.; Hildebrand, J.A. Autonomous underwater glider based embedded real-time marine mammal detection and classification. J. Acoust. Soc. Am. 2010, 127, 1971. [Google Scholar] [CrossRef]
- Aniceto, A.S.; Pedersen, G.; Primicerio, R.; Biuw, M.; Lindstrøm, U.; Camus, L. Arctic Marine Data Collection Using Oceanic Gliders: Providing Ecological Context to Cetacean Vocalizations. Front. Mar. Sci. 2020, 7, 585754. [Google Scholar] [CrossRef]
- Davis, R.; Baumgartner, M.; Comeau, A.; Cunningham, D.; Davies, K.; Furlong, A.; Johnson, H.; L’Orsa, S.; Ross, T.; Taggart, C.; et al. Tracking whales on the Scotian Shelf using passive acoustic monitoring on ocean gliders. In Proceedings of the OCEANS 2016, Monterey, CA, USA, 19–23 September 2016; pp. 1–4. [Google Scholar] [CrossRef]
- Schultz, B.; Hobson, B.; Kemp, M.; Meyer, J.; Moody, R.; Pinnix, H.; Clair, M. Multi-UUV missions using RANGER MicroUUVs. In Proceedings of the 13th Unmanned Untethered Submersible Technology, Durham, NH, USA, 24–27 August 2003; Available online: https://www.researchgate.net/publication/246892324_Multi-UUV_missions_using_RANGER_MicroUUVs (accessed on 1 October 2022).
- Healey, A.J.; Kim, J. Multiple Autonomous Vehicle Solutions to Minefield Reconnaissance and Mapping. In Proceedings of the Australian-American Conference on MCM, Washington, DC, USA, 3 November 1999; Available online: https://citeseerx.ist.psu.edu/viewdoc/download;jsessionid=5AD04CB5F41E47E435D5C85075F8A521?doi=10.1.1.606.2824&rep=rep1&type=pdf (accessed on 1 October 2022).
- Fiorelli, E.; Leonard, N.; Bhatta, P.; Paley, D.; Bachmayer, R.; Fratantoni, D. Multi-AUV Control and Adaptive Sampling in Monterey Bay. Ocean. Eng. IEEE J. 2006, 31, 935–948. [Google Scholar] [CrossRef]
- Naomi, L.; Derek, P.; Russ, D.; David, F.; Francois, L.; Fumin, Z. Coordinated Control of an Underwater Glider Fleet in an Adaptive Ocean Sampling Field Experiment in Monterey Bay. J. Field Robot. 2010, 27, 718–740. [Google Scholar] [CrossRef]
- Naomi, L.; Derek, P.; Francois, L.; Sepulchre, R.; David, F.; Russ, D. Collective Motion, Sensor Networks, and Ocean Sampling. Proc. IEEE 2007, 95, 48–74. [Google Scholar] [CrossRef]
- Nicholson, D.; Emerson, S.; Eriksen, C. Net community production in the deep euphotic zone of the subtropical North Pacific gyre from glider surveys. Limnol. Oceanogr. 2008, 53, 2226–2236. [Google Scholar] [CrossRef]
- Resident Robotics. 2018. Available online: https://oceanos.ru/resident_general (accessed on 1 October 2022).
- Yaomei, W.; Neil, B.; Worakanok, T.; Craig, B.; Sarik, S. Adaptive control for follower gliders mapping underwater oil patches. J. Hazard. Mater. 2022, 436, 129039. [Google Scholar] [CrossRef]
- Wave Glider Provides Gateway to Remote Exploration. 2018. Available online: https://www.whoi.edu/news-insights/content/wave-glider-provides-gateway-to-remote-exploration/ (accessed on 2 November 2021).
- Wave Glider Hot Spot. 2018. Available online: https://www.mbari.org/technology/emerging-current-tools/communications/wave-glider-based-communications-hotspot/ (accessed on 2 November 2021).
- McCammon, S.; Marcon dos Santos, G.; Frantz, M.; Welch, T.P.; Best, G.; Shearman, R.K.; Nash, J.D.; Barth, J.A.; Adams, J.A.; Hollinger, G.A. Ocean front detection and tracking using a team of heterogeneous marine vehicles. J. Field Robot. 2021, 38, 854–881. [Google Scholar] [CrossRef]
- Shkurti, F.; Xu, A.; Meghjani, M.; Gamboa Higuera, J.C.; Girdhar, Y.; Giguère, P.; Dey, B.B.; Li, J.; Kalmbach, A.; Prahacs, C.; et al. Multi-domain monitoring of marine environments using a heterogeneous robot team. In Proceedings of the 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems, Vilamoura-Algarve, Portugal, 7–12 October 2012; pp. 1747–1753. [Google Scholar] [CrossRef]
- Maevskij, A.M.; Pechajko, I.A.; Tursenev, S.A. Application of marine robotic systems for monitoring and analysis of potentially dangerous underwater objects. Probl. Technosphere Risk Manag. 2021, 2, 32–39. [Google Scholar]
- Maevskij, A.M.; Zanin, V.Y.U.; Tursenev, S.A. Group application of underwater gliders in the task of monitoring underwater potentially dangerous objects on the example of emergency oil spill response. Probl. Technosphere Risk Manag. 2021, 3, 25–35. [Google Scholar]
- Zanin, V.Y.U.; Kozhemyakin, I.V.; Maevskij, A.M. The use of marine robotics in the tasks of operational oceanography. Domestic and foreign experience. Mar. Inf. Control. Syst. 2020, 1, 39–49. [Google Scholar]
- Voloshin, S.B.; Zanin, V.Y.U.; Maevskij, A.M. Aspects of the Application of Heterogeneous Groups of Robotic Complexes with Increased Autonomy, Including from Observatories, in Order to Obtain Oceanographic Data and Their Further Use for the Development of the Arctic Zone. Collection of Works of the Laureates of the International Competition of Scientific, Scientific, Technical and Innovative Developments Aimed at the Development and Development of the Arctic and the Continental Shelf. 2020; pp. 62–77. Available online: https://oceanos.ru/s1/files/File/2020_arktika_sb.pdf (accessed on 1 October 2022).
- Maevskij, A.M.; Kopylov, S.A. Aspects of using the grouping of underwater gliders for environmental monitoring of the world ocean. In Materials of the All-Russian Conference and School of Young Scientists “Technosphere Security Systems”; Southern Federal University: Taganrog, Russia, 2014; pp. 11–12. [Google Scholar]
- Dubravin, V.F. Evolution of Hydrochemical Structures of the Baltic Sea Waters; IO RAN.: Saint Petersburg, Russia, 2021; p. 354. [Google Scholar]
- Gurenko, B.; Maevskiy, A.; Kulchenko, A.; Beresnev, M. The Structure of Automatic Control Systems for Underwater Gliders. In Proceedings of the 4th International Conference on Control, Mechatronics and Automation, Barcelona, Spain, 7–11 December 2016; pp. 88–91. [Google Scholar] [CrossRef]
- Gurenko, B.V.; Maevskij, A.M.; Surov, K.A. Development and research of a positional trajectory controller for controlling the movement of an underwater glider Materials of the All-Russian conference and school of young scientists. Eng. Bull. Don 2019, 6, 20. Available online: http://www.ivdon.ru/ru/magazine/by_years (accessed on 1 October 2022).
- da Silva Tchilian, R.; Rafikova, E.; Gafurov, S.A.; Rafikov, M. Optimal Control of an Underwater Glider Vehicle. Procedia Eng. 2017, 176, 732–740. [Google Scholar] [CrossRef]
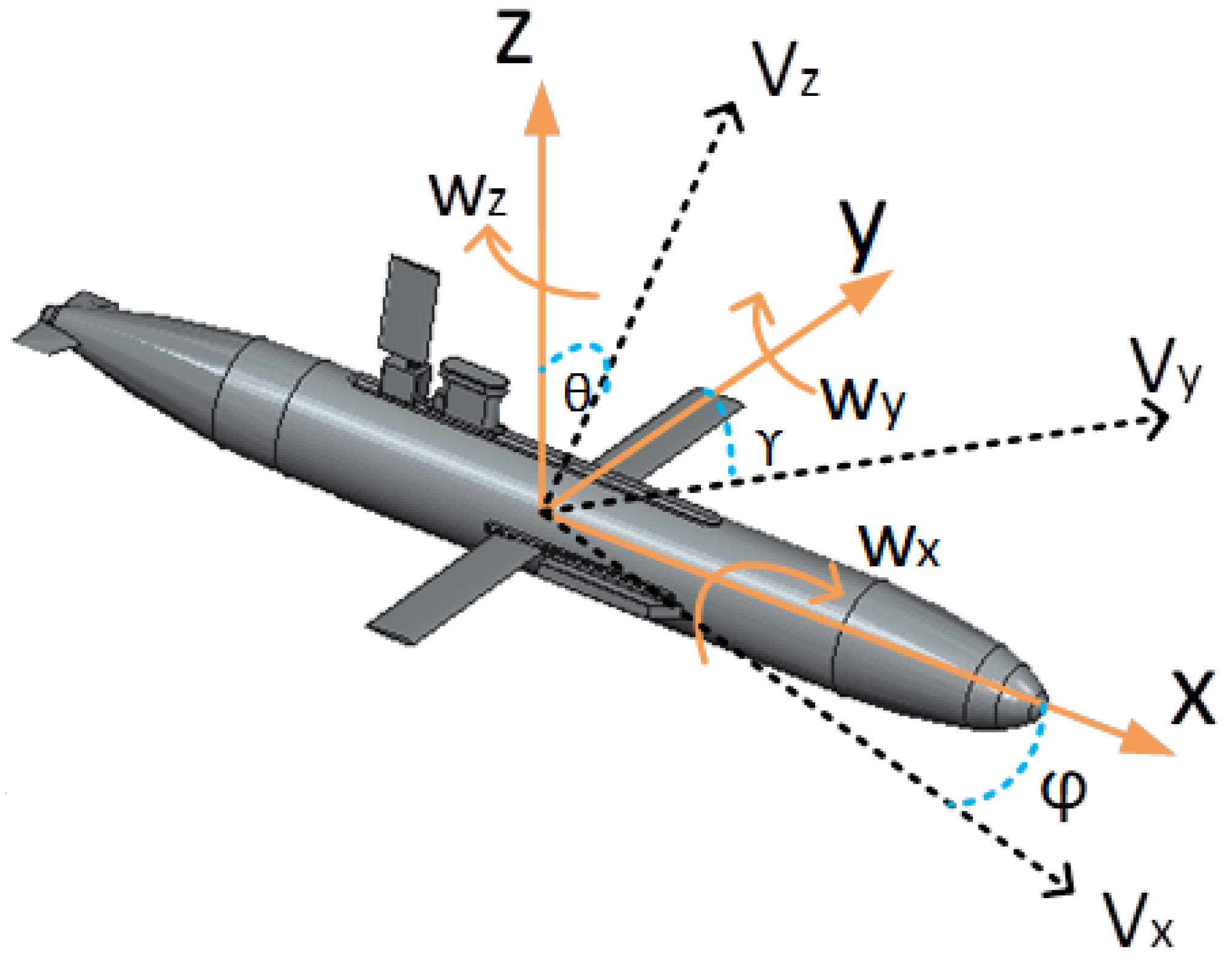
- Nikushchenko, D.V. On the selection of reference frames in investigation of an underwater vehicle dynamics. Mar. Intellect. Technol. 2015, 2-1, 19–25. [Google Scholar]
- Pshikhopov, V.; Gurenko, B.; Beresnev, M.; Nazarkin, A. Implementation of underwater glider and identification of its parameters. University Technologi Malaisia. J. Teknol. 2016, 78, 109–114. [Google Scholar] [CrossRef]
- Gurenko, B.; Surov, K.; Nazarkin, A. Research and development of a trajectory-position controller for an underwater glider. IOP Conf. Ser. Mater. Sci. Eng. 2020, 895, 012011. [Google Scholar] [CrossRef]
- Smirnov, A.S.; Tursenev, S.A.; Maevskiy, A.M. Robotics in Depth Monitoring. Civ. Prot. 2022, 3, 42–44. Available online: https://pressa.ru/ru/magazines/grazhdanskaya-zaschita/03-2022#/ (accessed on 1 October 2022).
- Maevskiy, A.M.; Smirnov, A.S.; Tursenev, S.A. Using of Groups of Marine Robotic Complexes as Systems for Detection and Monitoring of Underwater Potentially Dangerous Objects and Pollution in the Sea Area. Civ. Prot. 2022, 9, 34–36. Available online: https://pressa.ru/ru/magazines/grazhdanskaya-zaschita/09-2022#/ (accessed on 1 October 2022).
- Maevskij, A.M.; Zanin, V.Y.U.; Kozhemyakin, I.V. Promising high-tech export-oriented and demanded by the domestic market areas of marine robotics. Robot. Tech. Cybern. 2022, 10, 5–13. [Google Scholar]
- Ryzhov, V.A.; Potekhin, Y.P.; Rozhdestvenskij, K.V.; Kozhemyakin, I.V. Wave glider as an element of the marine global information and measurement system. In Proceedings of the X Scientific and Practical Conference “Perspective Systems and Management Tasks”, Dombai, Karachay-Cherkess Republic, Russia, 6–10 April 2016; Southern Federal University Press: Rostov-on-Don, Russia, 2016; pp. 101–112. [Google Scholar]
- Nikushchenko, D.; Ryzhov, V.; Tryaskin, N. Modeling hydrodynamic characteristics of wave glider. In Proceedings of the XII All-Russian Congress on Fundamental Problems of Theoretical and Applied Mechanics, Ufa, Russia, 19–24 August 2019; pp. 71–73. Available online: http://ruscongrmech2019.bashedu.ru/ (accessed on 1 October 2022).
- Ovchinnikov, K.; Ryzhov, V.; Sinishin, A.; Kozhemyakin, I. Experimental study of running characteristics of wave glider. In Proceedings of the XV All-Russian Scientific and Practical Conference “Advanced Systems and Control Problems”, Dombai, Karachay-Cherkess Republic, Russia, 6–10 April 2020; Southern Federal University Press: Rostov-on-Don, Russia, 2020; pp. 91–97. [Google Scholar]
- Wang, P.; Xinliang, T.; Wenyue, L.; Zhihuan, H.; Yong, L. Dynamic modeling and simulations of the wave glider. Appl. Math. Model. 2019, 66, 77–96. [Google Scholar] [CrossRef]
- Claus, B. Development of an Underwater Glider Equipped with an Auxiliary Propulsion Module. Ph.D. Thesis, Faculty of Engineering and Applied Science, Memorial University of Newfoundland, St. John’s, NL, Canada, 2010. Available online: https://research.library.mun.ca/8807/ (accessed on 1 October 2022).
- Dae-Hyeong, J.; Hyeung-Sik, C.; Jin-Il, K.; Hyunjoon, C.; Moon-Gap, J.; Jae-Heon, L. Design and control of hybrid underwater glider. Adv. Mech. Eng. 2019, 11, 1–9. [Google Scholar] [CrossRef]
- Tian, X.; Zhang, L.; Zhang, H. Research on Sailing Efficiency of Hybrid-Driven Underwater Glider at Zero Angle of Attack. J. Mar. Sci. Eng. 2022, 10, 21. [Google Scholar] [CrossRef]
- Niu, W.D.; Wang, S.X.; Wang, Y.H. Stability analysis of hybrid-driven underwater glider. China Ocean Eng 2017, 31, 528–538. [Google Scholar] [CrossRef]
- Sang-Ki, J.; Hyeung-Sik, C.; Jin-Il, K.; Ji-Youn, O.; Seo-Kang, K.; Thieu, N. Design and control of navigation system for hybrid underwater glider. IOS Press. J. Intell. Fuzzy Syst. 2019, 36, 1–16. [Google Scholar] [CrossRef]
- Pshikhopov, V.; Medvedev, M.; Gurenko, B. Algorithms of terminal control of multi-copters. Mekhatronika Avtom. Upr. 2019, 20, 44–51. [Google Scholar] [CrossRef]
- Pshikhopov, V.; Medvedev, M.; Gaiduk, A.; Kolesnikov, A. Control Method for Heterogeneous Vehicle Groups Control in Obstructed 2-D Environments. Lect. Notes Comput. Sci. 2016, 9812, 40–47. [Google Scholar] [CrossRef]
- Pshikhopov, V.; Medvedev, M. Group control of autonomous robots motion in uncertain environment via unstable modes. SPIIRAS Proc. 2018, 5, 39–63. [Google Scholar] [CrossRef]
- Maevsky, A.M.; Morozov, R.O.; Ryzhov, V.A.; Gorely, A.E. Development of a hybrid method for planning the movement of a group of marine robotic complexes in an a priori unknown environment with obstacles. Proc. South. Fed. Univ. Tech. Sci. 2021, 1, 30–47. [Google Scholar] [CrossRef]
- Maevskiy, A.; Gorelyi, A.; Morozov, R. Development of a Hybrid Method for Planning the Movement of a Group of Marine Robotic Complexes in a Priori Unknown Environment with Obstacles. In Proceedings of the 2021 IEEE 22nd International Conference of Young Professionals in Electron Devices and Materials (EDM), Souzga, Russia, 30 June–4 July 2021; pp. 461–466. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter Name | Parameter Value |
|---|---|
| Mass of the glider | 138.45 kg |
| Forward buoyancy engine displacement | 1.3 L |
| Backward buoyancy engine displacement | 1.2 L |
| Mass of the trim control system | 10.2 kg |
| Offset of the trim control system along OX axis | 0.095 m |
| Mass of the rotation system (roll control system) | 8.3 kg |
| Roll control system rotation range along OX axis | 75 deg |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nikushchenko, D.; Maevskiy, A.; Kozhemyakin, I.; Ryzhov, V.; Goreliy, A.; Sulima, T. Development of a Structural-Functional Approach for Heterogeneous Glider-Type Marine Robotic Complexes’ Group Interaction to Solve Environmental Monitoring and Patrolling Problems. J. Mar. Sci. Eng. 2022, 10, 1531. https://doi.org/10.3390/jmse10101531
Nikushchenko D, Maevskiy A, Kozhemyakin I, Ryzhov V, Goreliy A, Sulima T. Development of a Structural-Functional Approach for Heterogeneous Glider-Type Marine Robotic Complexes’ Group Interaction to Solve Environmental Monitoring and Patrolling Problems. Journal of Marine Science and Engineering. 2022; 10(10):1531. https://doi.org/10.3390/jmse10101531
Chicago/Turabian StyleNikushchenko, Dmitry, Andrey Maevskiy, Igor Kozhemyakin, Vladimir Ryzhov, Artem Goreliy, and Timofey Sulima. 2022. "Development of a Structural-Functional Approach for Heterogeneous Glider-Type Marine Robotic Complexes’ Group Interaction to Solve Environmental Monitoring and Patrolling Problems" Journal of Marine Science and Engineering 10, no. 10: 1531. https://doi.org/10.3390/jmse10101531
APA StyleNikushchenko, D., Maevskiy, A., Kozhemyakin, I., Ryzhov, V., Goreliy, A., & Sulima, T. (2022). Development of a Structural-Functional Approach for Heterogeneous Glider-Type Marine Robotic Complexes’ Group Interaction to Solve Environmental Monitoring and Patrolling Problems. Journal of Marine Science and Engineering, 10(10), 1531. https://doi.org/10.3390/jmse10101531