

Dominant Frequency Extraction for Operational Underwater Sound of Offshore Wind Turbines Using Adaptive Stochastic Resonance

Abstract
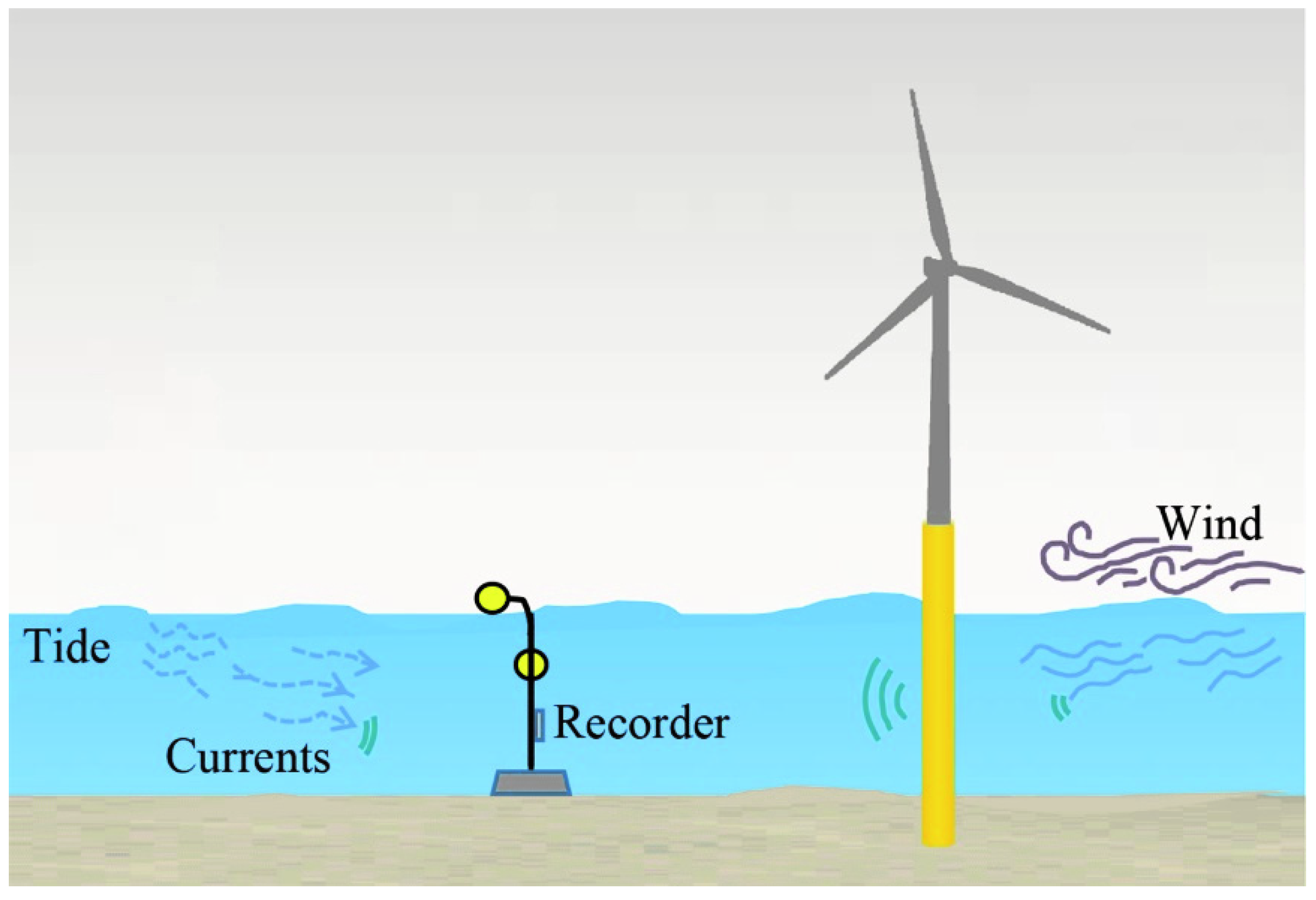
:1. Introduction
2. Materials and Methods
2.1. Adaptive Stochastic Resonance
2.2. Time–Frequency–Amplitude Fusion Index
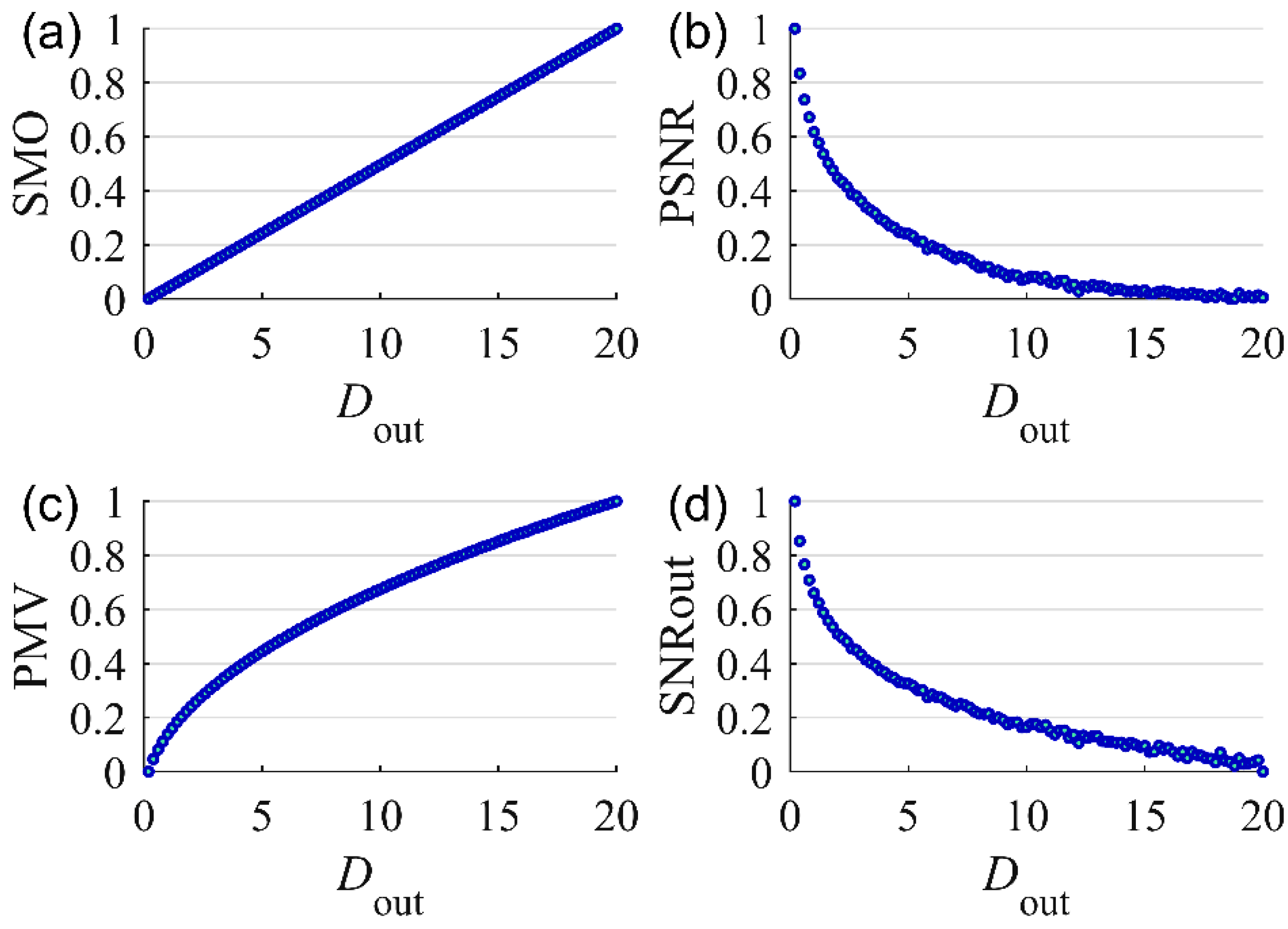
2.2.1. Selection of Basic Indices for Filtering Quality Evaluation
2.2.2. Fusion of Multiple Basic Indices
- (1)
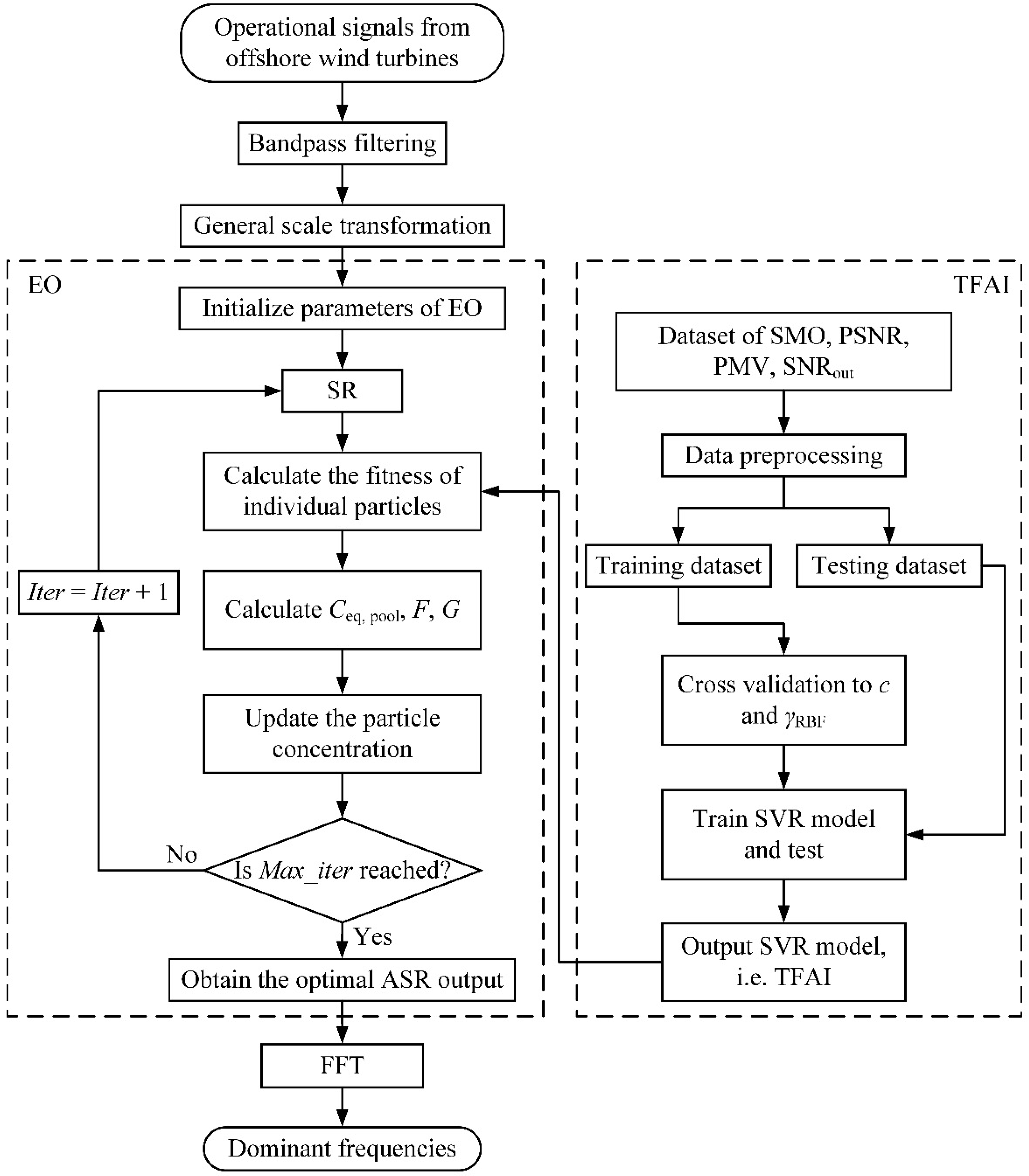
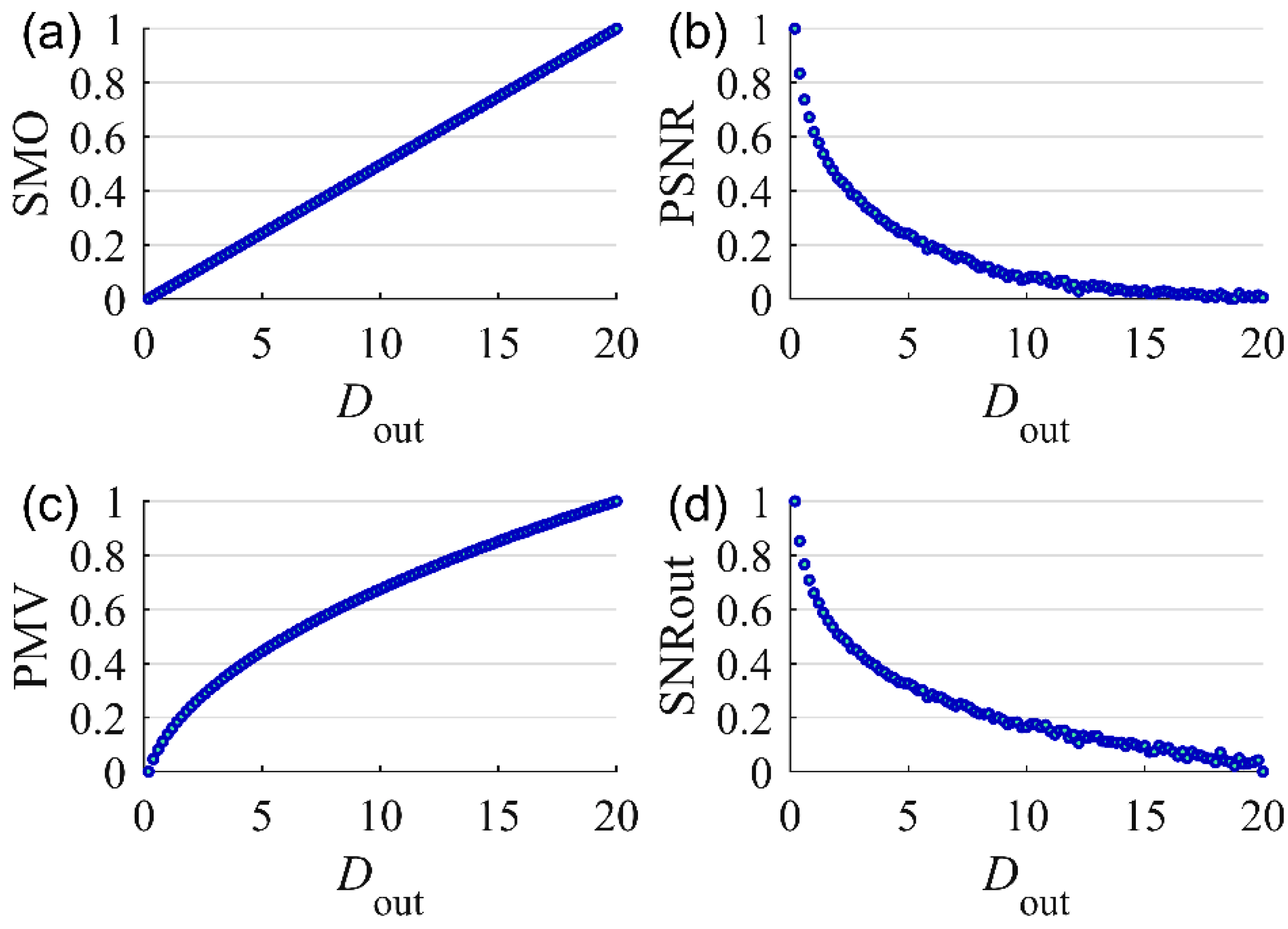
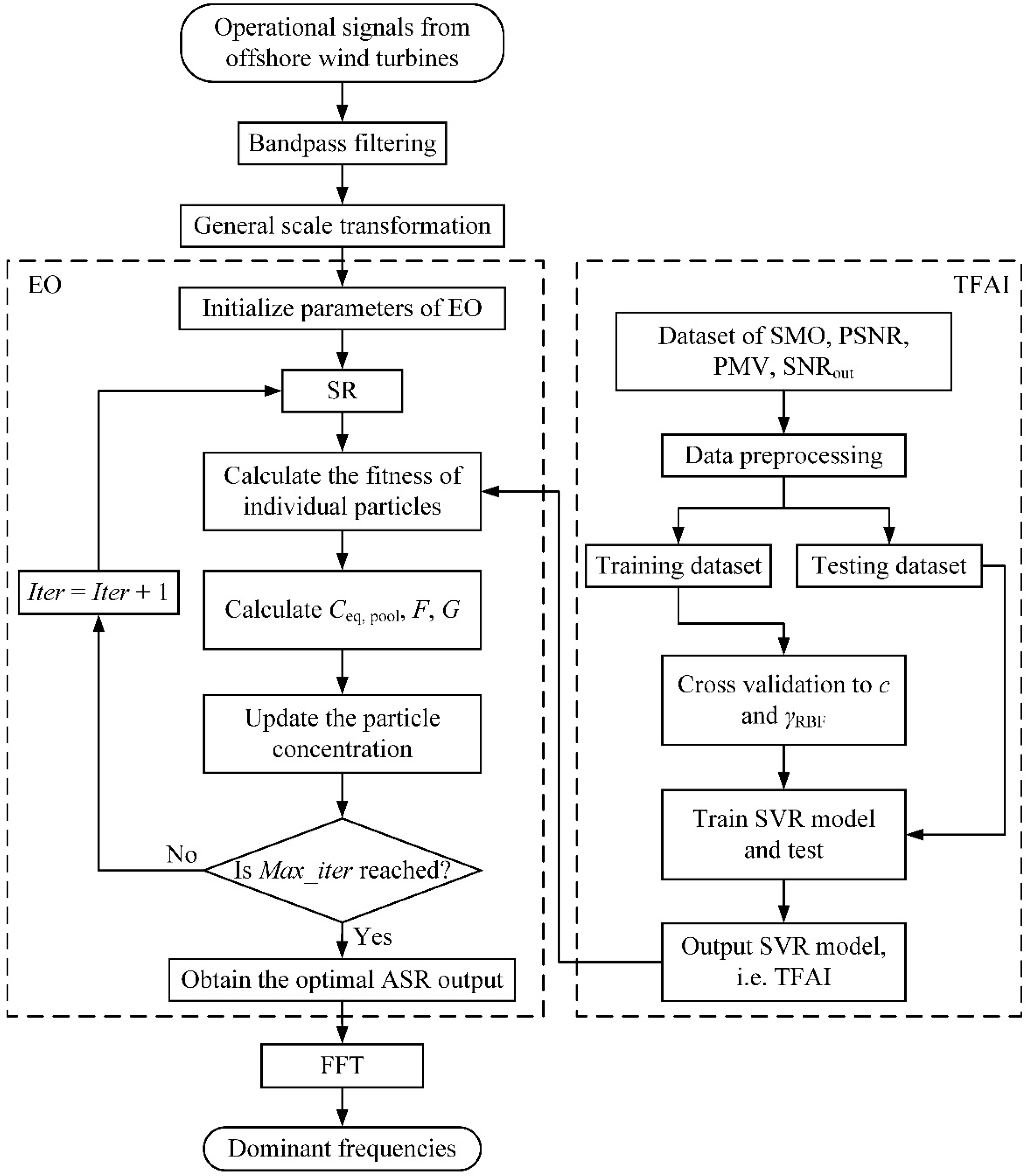
- Dataset generation. The periodic signal was superimposed with high-intensity () Gaussian white noise to generate a system input. After that, the same periodic signal was superimposed with Gaussian white noise of different intensities () to generate multiple system outputs. For each input–output pair, the corresponding SMO, PSNR, and PMV were calculated as the eigenvalues of the samples, and the of the target signal was taken as the target value, thus forming a dataset.
- (2)
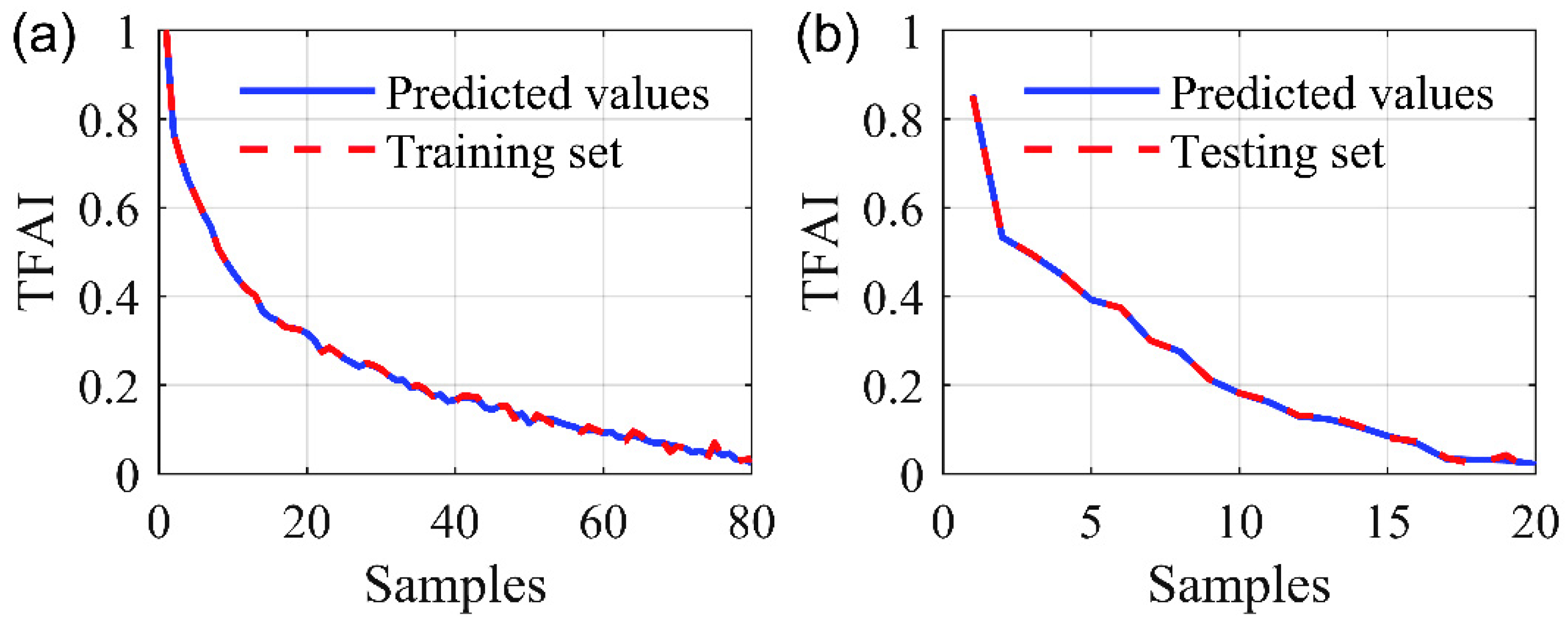
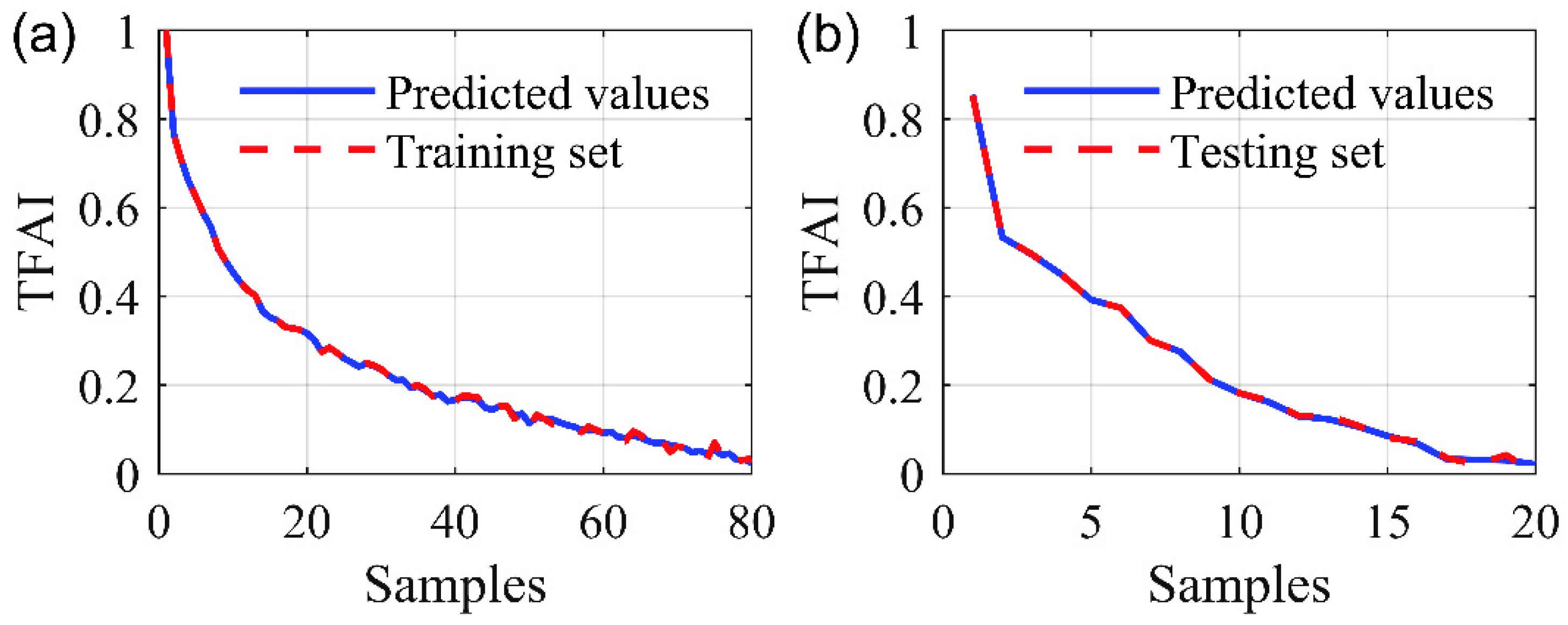
- Data preprocessing. To prevent an eigenvalue from being too large or too small, resulting in an unbalanced effect in the regression, the dataset needed to be normalized. The normalization process was as follows:where and are the maximum and minimum values of each group of eigenvalue data, respectively; is the original data; and is the normalized data with a range of [0, 1]. Then, 80% of the total data were randomly selected as the training dataset, and the remaining 20% were used as the testing dataset.
- (3)
- Parameter settings. The RBF was selected as the kernel function of the SVR model, and the values of c and were determined using cross-validation and a grid search.
- (4)
- Training and testing. The training dataset was used to construct the SVR model and measure its accuracy, and the testing dataset was used to evaluate its generalization ability. Finally, the generated model was the TFAI.
2.3. Equilibrium Optimizer
- (1)
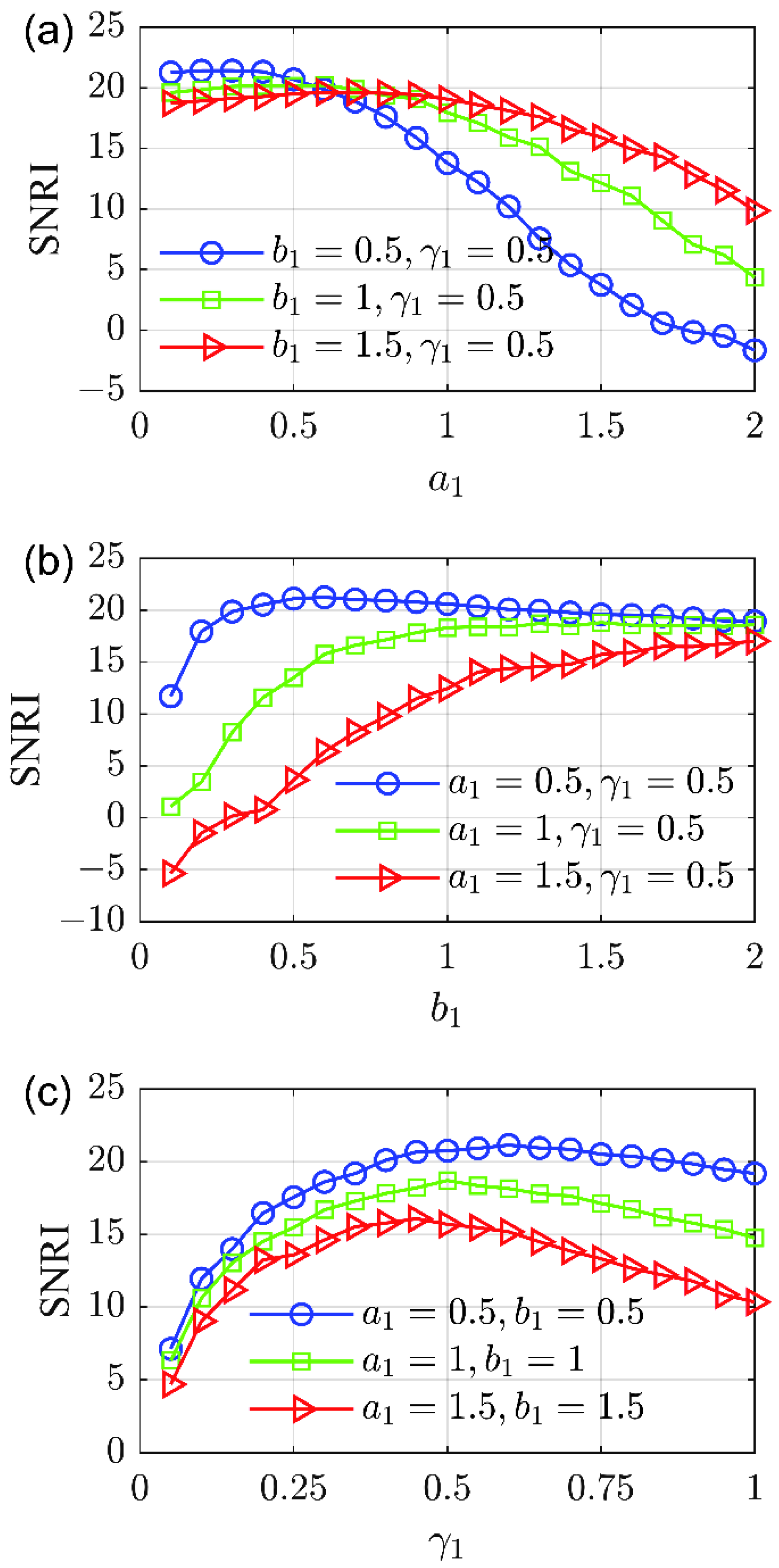
- Initialization. The range of ASR system parameters a1, b1, and γ1, the number of particles, and the maximum iterative number Max_iter were set, and the initial concentration of individual particles was initialized.
- (2)
- Evaluation. SR was performed according to the particle concentration, and the TFAI was calculated as the fitness of individual particles.
- (3)
- Update. The equilibrium pool was calculated, as well as the exponential term F and the generation rate G in turn, and the particle concentration was updated according to Equation (11).
- (4)
- Termination. It was judged whether the current iteration Iter reached Max_iter. If so, the particle concentration corresponding to the maximum fitness was saved, and the optimal ASR signal was output. Otherwise, Iter = Iter + 1, and steps (2) and (3) were repeated.
3. Results
3.1. Analysis of TFAI
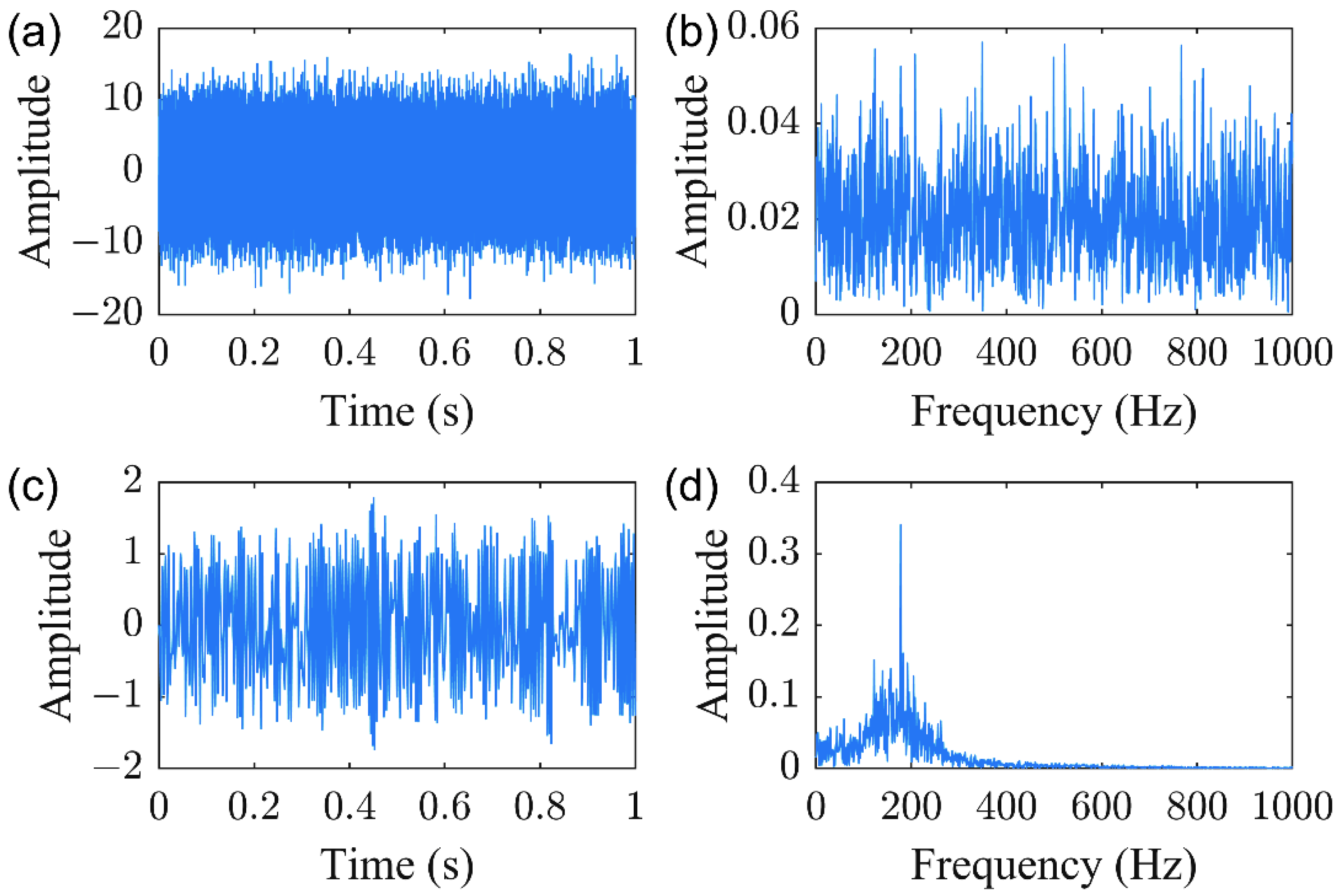
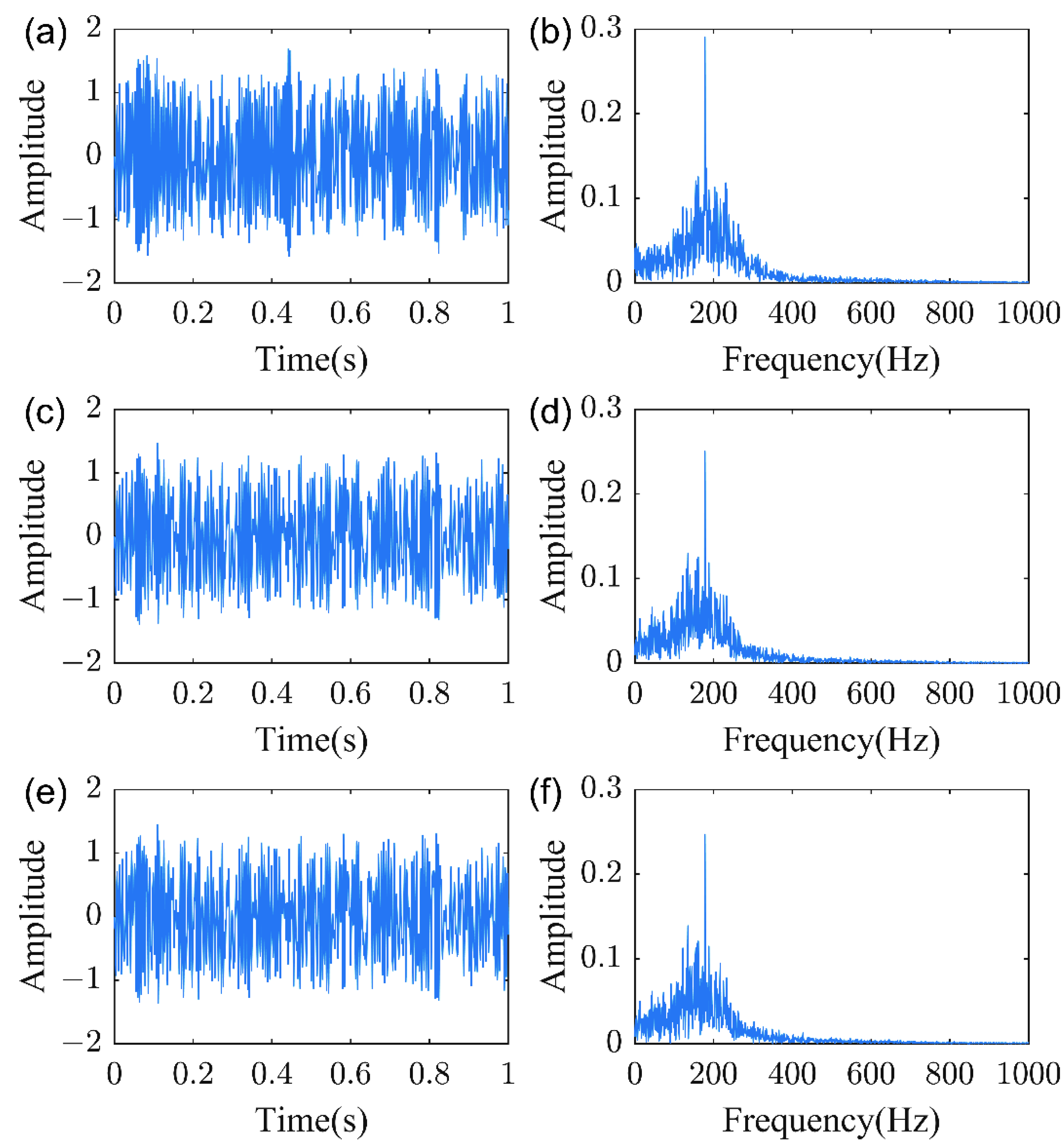
3.2. Verification with Simulation
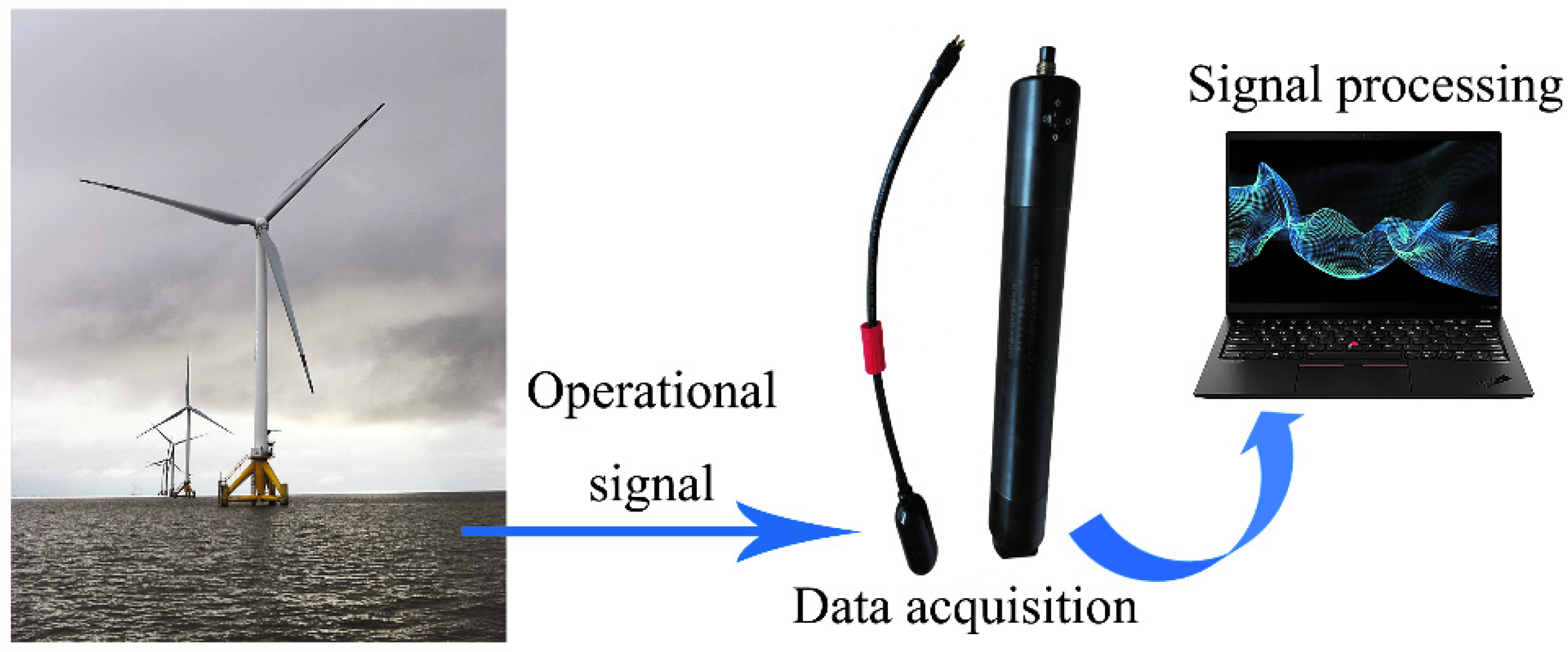
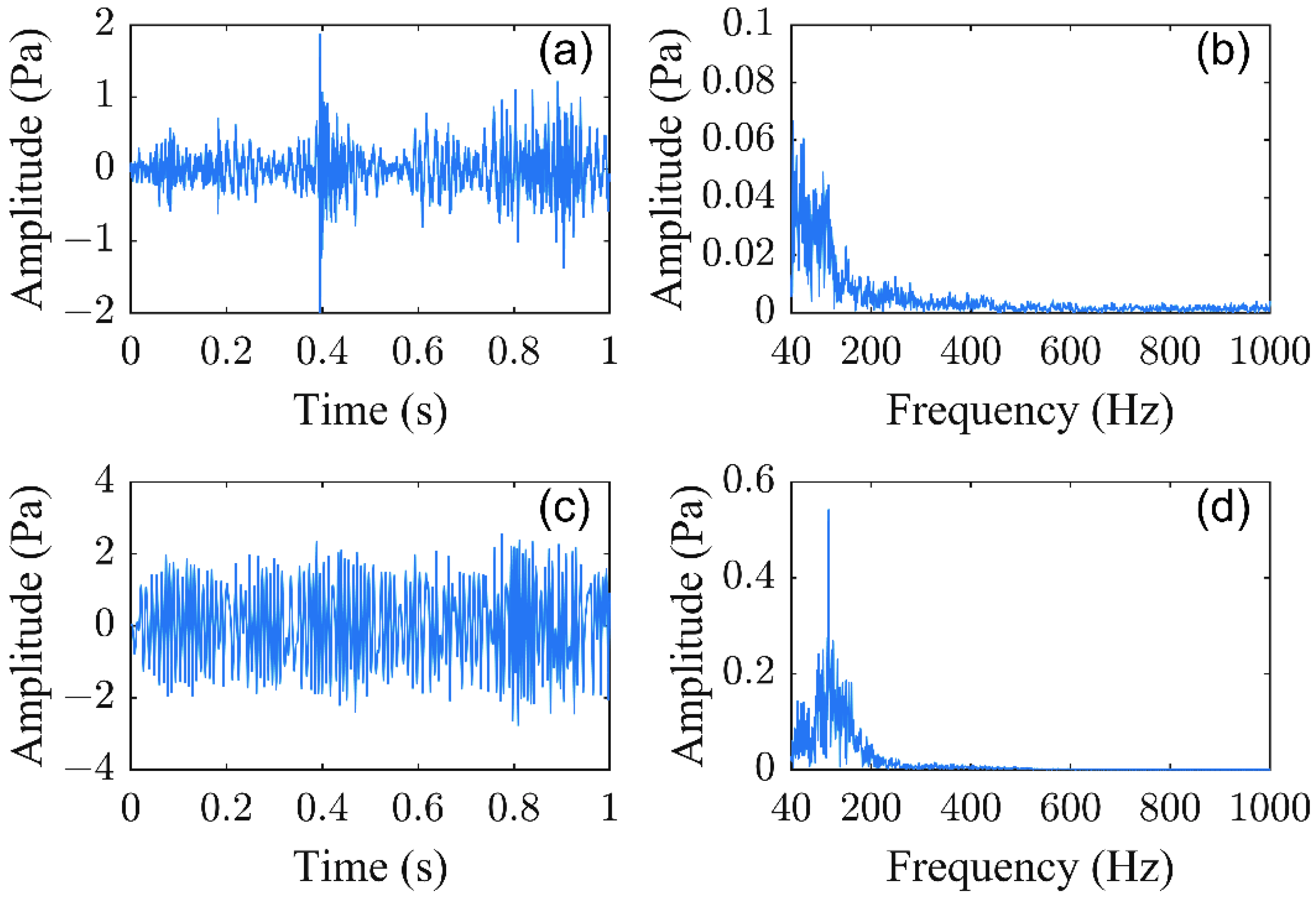
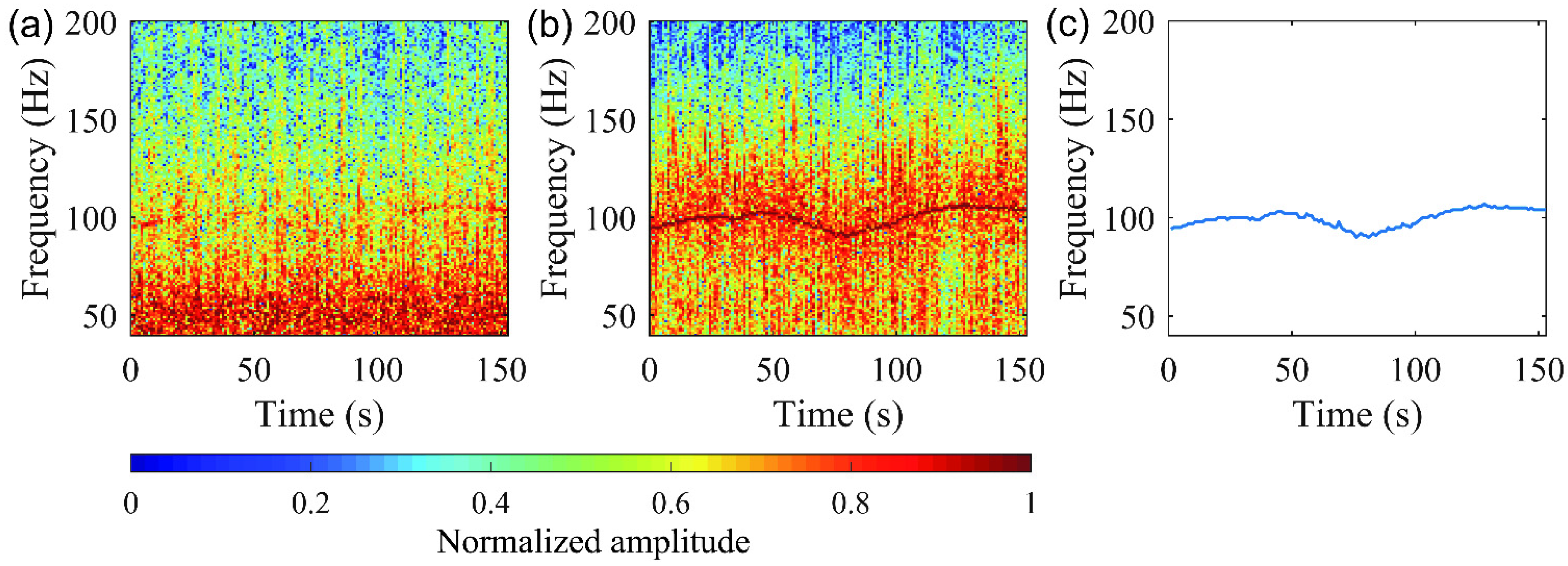
3.3. Verification with Field Data
3.4. Comparison of Extracted Dominant Frequency and Wind Turbine Rotor Speed
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- IRENA; GEC. Renewable Capacity Statistics 2022; International Renewable Energy Agency: Abu Dhabi, United Arab Emirates, 2022. [Google Scholar]
- Leung, D.Y.C.; Yang, Y. Wind energy development and its environmental impact: A review. Renew. Sustain. Energy Rev. 2012, 16, 1031–1039. [Google Scholar] [CrossRef]
- Jianu, O.; Rosen, M.A.; Naterer, G. Noise pollution prevention in wind turbines: Status and recent advances. Sustainability 2012, 4, 1104–1117. [Google Scholar] [CrossRef] [Green Version]
- Tabassum, A.; Premalatha, M.; Abbasi, T.; Abbasi, S.A. Wind energy: Increasing deployment, rising environmental concerns. Renew. Sustain. Energy Rev. 2014, 31, 270–288. [Google Scholar] [CrossRef]
- Tougaard, J.; Henriksen, O.D.; Miller, L.A. Underwater noise from three types of offshore wind turbines: Estimation of impact zones for harbor porpoises and harbor seals. J. Acoust. Soc. Am. 2009, 125, 3766–3773. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lindell, H. Utgrunden Off-Shore Wind Farm-Measurements of Underwater Noise; Ingemansson Technology AB: Gothenburg, Sweden, 2003. [Google Scholar]
- Yang, C.M.; Liu, Z.W.; Lü, L.G.; Yang, G.B.; Huang, L.F.; Jiang, Y. Observation and comparison of tower vibration and underwater noise from offshore operational wind turbines in the East China Sea Bridge of Shanghai. J. Acoust. Soc. Am. 2018, 144, EL522–EL527. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Pangerc, T.; Theobald, P.D.; Wang, L.S.; Robinson, S.P.; Lepper, P.A. Measurement and characterisation of radiated underwater sound from a 3.6 MW monopile wind turbine. J. Acoust. Soc. Am. 2016, 140, 2913–2922. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Duarte, C.M.; Chapuis, L.; Collin, S.P.; Costa, D.P.; Devassy, R.P.; Eguiluz, V.M.; Erbe, C.; Gordon, T.A.C.; Halpern, B.S.; Harding, H.R.; et al. The soundscape of the Anthropocene ocean. Science 2021, 371, eaba4658. [Google Scholar] [CrossRef] [PubMed]
- Tougaard, J.; Hermannsen, L.; Madsen, P.T. How loud is the underwater noise from operating offshore wind turbines? J. Acoust. Soc. Am. 2020, 148, 2885–2893. [Google Scholar] [CrossRef] [PubMed]
- Stöber, U.; Thomsen, F. How could operational underwater sound from future offshore wind turbines impact marine life? J. Acoust. Soc. Am. 2021, 149, 1791–1795. [Google Scholar] [CrossRef] [PubMed]
- de Jong, K.; Amorim, M.C.P.; Fonseca, P.J.; Fox, C.J.; Heubel, K.U. Noise can affect acoustic communication and subsequent spawning success in fish. Environ. Pollut. 2018, 237, 814–823. [Google Scholar] [CrossRef] [PubMed]
- Voellmy, I.K.; Purser, J.; Flynn, D.; Kennedy, P.; Simpson, S.D.; Radford, A.N. Acoustic noise reduces foraging success in two sympatric fish species via different mechanisms. Anim. Behav. 2014, 89, 191–198. [Google Scholar] [CrossRef]
- Celi, M.; Filiciotto, F.; Maricchiolo, G.; Genovese, L.; Quinci, E.M.; Maccarrone, V.; Mazzola, S.; Vazzana, M.; Buscaino, G. Vessel noise pollution as a human threat to fish: Assessment of the stress response in gilthead sea bream (Sparus aurata, Linnaeus 1758). Fish Physiol. Biochem. 2016, 42, 631–641. [Google Scholar] [CrossRef] [PubMed]
- Sigray, P.; Andersson, M.H. Particle motion measured at an operational wind turbine in relation to hearing sensitivity in fish. J. Acoust. Soc. Am. 2011, 130, 200–207. [Google Scholar] [CrossRef] [PubMed]
- Nedelec, S.L.; Campbell, J.; Radford, A.N.; Simpson, S.D.; Merchant, N.D. Particle motion: The missing link in underwater acoustic ecology. Methods Ecol. Evol. 2016, 7, 836–842. [Google Scholar] [CrossRef] [Green Version]
- Popper, A.N.; Hawkins, A.D. The importance of particle motion to fishes and invertebrates. J. Acoust. Soc. Am. 2018, 143, 470–488. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Popper, A.N.; Hawkins, A.D. An overview of fish bioacoustics and the impacts of anthropogenic sounds on fishes. J. Fish Biol. 2019, 94, 692–713. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Madsen, P.T.; Wahlberg, M.; Tougaard, J.; Lucke, K.; Tyack, P. Wind turbine underwater noise and marine mammals: Implications of current knowledge and data needs. Mar. Ecol. Prog. Ser. 2006, 309, 279. [Google Scholar] [CrossRef]
- Marmo, B.; Roberts, I.; Buckingham, M.; King, S.; Booth, C. Modelling of Noise Effects of Operational Offshore Wind Turbines Including Noise Transmission through Various Foundation Types; Scottish Government: Edinburgh, Scotland, 2013.
- Giannakis, G.B.; Tsatsanis, M.K. Signal detection and classification using matched filtering and higher order statistics. IEEE Trans. Acoust. Speech Signal Process. 1990, 38, 1284–1296. [Google Scholar] [CrossRef]
- Bailey, T.C.; Sapatinas, T.; Powell, K.J.; Krzanowski, W.J. Signal detection in underwater sound using wavelets. J. Am. Stat. Assoc. 1998, 93, 73–83. [Google Scholar] [CrossRef]
- Bao, F.; Wang, X.; Tao, Z.; Wang, Q.; Du, S. EMD-based extraction of modulated cavitation noise. Mech. Syst. Signal Process. 2010, 24, 2124–2136. [Google Scholar] [CrossRef]
- Benzi, R.; Sutera, A.; Vulpiani, A. The mechanism of stochastic resonance. J. Phys. A Math. Gen. 1981, 14, L453. [Google Scholar] [CrossRef]
- Gammaitoni, L.; Hänggi, P.; Jung, P.; Marchesoni, F. Stochastic resonance. Rev. Mod. Phys. 1998, 70, 223. [Google Scholar] [CrossRef]
- Qiu, Y.; Yuan, F.; Ji, S.; Cheng, E. Stochastic resonance with reinforcement learning for underwater acoustic communication signal. Appl. Acoust. 2021, 173, 107688. [Google Scholar] [CrossRef]
- Dong, H.; Wang, H.; Shen, X.; He, K. Parameter matched stochastic resonance with damping for passive sonar detection. J. Sound Vib. 2019, 458, 479–496. [Google Scholar] [CrossRef]
- Schoeman, R.P.; Erbe, C.; Plön, S. Underwater Chatter for the Win: A First Assessment of Underwater Soundscapes in Two Bays along the Eastern Cape Coast of South Africa. J. Mar. Sci. Eng. 2022, 10, 746. [Google Scholar] [CrossRef]
- Wenz, G.M. Acoustic ambient noise in the ocean: Spectra and sources. J. Acoust. Soc. Am. 1962, 34, 1936–1956. [Google Scholar] [CrossRef]
- Fauve, S.; Heslot, F. Stochastic resonance in a bistable system. Phys. Lett. A 1983, 97, 5–7. [Google Scholar] [CrossRef]
- McNamara, B.; Wiesenfeld, K.; Roy, R. Observation of stochastic resonance in a ring laser. Phys. Rev. Lett. 1988, 60, 2626. [Google Scholar] [CrossRef]
- Lu, S.; He, Q.; Wang, J. A review of stochastic resonance in rotating machine fault detection. Mech. Syst. Sig. Process. 2019, 116, 230–260. [Google Scholar] [CrossRef]
- Zheng, B.; Wang, N.; Zheng, H.; Yu, Z.; Wang, J. Object extraction from underwater images through logical stochastic resonance. Opt. Lett. 2016, 41, 4967–4970. [Google Scholar] [CrossRef]
- McNamara, B.; Wiesenfeld, K. Theory of stochastic resonance. Phys. Rev. A 1989, 39, 4854. [Google Scholar] [CrossRef] [PubMed]
- Huang, D.; Yang, J.; Zhang, J.; Liu, H. An improved adaptive stochastic resonance with general scale transformation to extract high-frequency characteristics in strong noise. Int. J. Mod. Phys. B 2018, 32, 1850185. [Google Scholar] [CrossRef]
- Wang, J.; He, Q.; Kong, F. Adaptive multiscale noise tuning stochastic resonance for health diagnosis of rolling element bearings. IEEE Trans. Instrum. Meas. 2014, 64, 564–577. [Google Scholar] [CrossRef]
- Li, J.; Zhang, J.; Li, M.; Zhang, Y. A novel adaptive stochastic resonance method based on coupled bistable systems and its application in rolling bearing fault diagnosis. Mech. Syst. Signal Process. 2019, 114, 128–145. [Google Scholar] [CrossRef]
- Zhou, P.; Lu, S.; Liu, F.; Liu, Y.; Li, G.; Zhao, J. Novel synthetic index-based adaptive stochastic resonance method and its application in bearing fault diagnosis. J. Sound Vib. 2017, 391, 194–210. [Google Scholar] [CrossRef]
- Huang, D.; Yang, J.; Zhou, D.; Sanjuán, M.A.; Liu, H. Recovering an unknown signal completely submerged in strong noise by a new stochastic resonance method. Commun. Nonlinear Sci. Numer. Simul. 2019, 66, 156–166. [Google Scholar] [CrossRef]
- Vapnik, V. The Nature of Statistical Learning Theory; Springer Science & Business Media: Berlin/Heidelberg, Germany, 1999. [Google Scholar]
- Chang, C.-C.; Lin, C.-J. LIBSVM: A library for support vector machines. ACM Trans. Intell. Syst. Technol. 2011, 2, 1–27. [Google Scholar] [CrossRef]
- Zhang, X.; Miao, Q.; Liu, Z.; He, Z. An adaptive stochastic resonance method based on grey wolf optimizer algorithm and its application to machinery fault diagnosis. ISA Trans. 2017, 71, 206–214. [Google Scholar] [CrossRef] [PubMed]
- Faramarzi, A.; Heidarinejad, M.; Stephens, B.; Mirjalili, S. Equilibrium optimizer: A novel optimization algorithm. Knowl.-Based Syst. 2020, 191, 105190. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | SNR/dB | Running Time/s |
|---|---|---|
| TFAI-EO-ASR | −8.3 | 251.9 |
| TFAI-AFSA-ASR | −9.4 | 1183.0 |
| WPSNR-EO-ASR | −9.7 | 235.9 |
| WPSNR-AFSA-ASR | −9.8 | 935.4 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, R.; Xu, X.; Zou, Z.; Huang, L.; Tao, Y. Dominant Frequency Extraction for Operational Underwater Sound of Offshore Wind Turbines Using Adaptive Stochastic Resonance. J. Mar. Sci. Eng. 2022, 10, 1517. https://doi.org/10.3390/jmse10101517
Wang R, Xu X, Zou Z, Huang L, Tao Y. Dominant Frequency Extraction for Operational Underwater Sound of Offshore Wind Turbines Using Adaptive Stochastic Resonance. Journal of Marine Science and Engineering. 2022; 10(10):1517. https://doi.org/10.3390/jmse10101517
Chicago/Turabian StyleWang, Rongxin, Xiaomei Xu, Zheguang Zou, Longfei Huang, and Yi Tao. 2022. "Dominant Frequency Extraction for Operational Underwater Sound of Offshore Wind Turbines Using Adaptive Stochastic Resonance" Journal of Marine Science and Engineering 10, no. 10: 1517. https://doi.org/10.3390/jmse10101517
APA StyleWang, R., Xu, X., Zou, Z., Huang, L., & Tao, Y. (2022). Dominant Frequency Extraction for Operational Underwater Sound of Offshore Wind Turbines Using Adaptive Stochastic Resonance. Journal of Marine Science and Engineering, 10(10), 1517. https://doi.org/10.3390/jmse10101517