
Inland Waterway Ship Path Planning Based on Improved RRT Algorithm

1
School of Navigation, Wuhan University of Technology, Wuhan 430063, China
2
Nanjing Hydraulic Research Institute, Nanjing 210029, China
3
Tianjin Research Institute for Water Transport Engineering, Tianjin 300456, China
4
Wuhan Second Ship Design and Research Institute, Wuhan 430205, China
*
Author to whom correspondence should be addressed.
J. Mar. Sci. Eng. 2022, 10(10), 1460; https://doi.org/10.3390/jmse10101460
Submission received: 9 August 2022
/
Revised: 29 September 2022
/
Accepted: 30 September 2022
/
Published: 9 October 2022
(This article belongs to the Section Ocean Engineering)
Abstract
:Ship path planning is crucial for the shipping industry, especially for the development of autonomous ships. Many algorithms have been developed over the last few decades to solve the ship path planning problem. However, it is still challenging for ship path planning in an inland waterway. In this paper, an improved RRT algorithm for ship path planning in complex inland waterways is proposed. The improved algorithm has a path shearing and smoothing module, and the function of keeping a safe distance between a moving ship and obstacles. In addition, the algorithm has been tested in two inland waterway scenarios, and the results have confirmed its feasibility and reliability. The path planning algorithm proposed in this research seeks to reduce the risks faced by ship navigation in inland water. It has theoretical and practical significance in improving navigation safety in complex inland waters.
1. Introduction
In ship navigation, most water traffic accidents occur in complex waters [1], such as converging waters, curved waters, narrow waters, and other troubled water areas with poor natural conditions and complicated traffic flow [2,3]. These areas have significant uncertainties and lead to a high risk of ship navigation [4]. Normally, ship navigation in complex inland waters rely on the crew’s seamanship. Proper ship path planning is vital to shipping safety, especially in tricky waters.
The path planning algorithms could be divided into three categories: traditional planning algorithms, intelligent planning algorithms, and sampling-based algorithms. In traditional path planning algorithms, the Artificial Potential Field (APF) algorithm has received widespread attention [5]. The APF algorithm is an elegant hybrid algorithm in which each obstacle is given a repulsive force. The method is used to search the path through the gradient descent method. The advantage of this method is that it can perform real-time path planning. However, the APF algorithm could have a local minimum in objective optimization, which could result in the ship not reaching its destination. The Graph-based algorithm is another type of traditional path planning algorithm. In 1973, Johnson [6] proposed the Dijkstra algorithm, which divides the map through the grid to find the shortest path. The A* algorithm first appeared in 1972 [7], and it can successfully find the feasible path in the given chart by traversing each node. However, the randomness of the search direction of the Dijkstra and A* algorithm are too large that the efficiency will be significantly reduced when there are too many obstacles [8]. Later, Stentz et al. [9] proposed the D* algorithm, which mainly relies on modeling the picture of the chart. However, this algorithm relies heavily on the resolution of pictures [10]. Therefore, the quality of the path planning cannot be guaranteed when the collected image is blurred. The graph-based algorithms have great speed, but it is challenging to apply to ship path planning due to their insufficient precision. Thirdly, the optimization-based algorithm is to transform the multi-objective multivariate multi-constraint coupled planning model into a function and seeks the optimal solution for path planning by optimizing the solution. For example, Dolgov et al. [11] used the initial path generated by Hybrid A* and optimized it to obtain smooth paths to minimize the path curvature and re-optimized the presence of collision cases to ensure safe and reliable paths. Ratliff et al. [12] proposed the CHOMP (Covariant Hamilton Optimization Motion Planning) algorithm, which first creates an initial path from the start position to the end position and optimizes the trajectory using gradient descent for the cost function to obtain a smooth, collision-free trajectory. The EB (Elastic Bands) algorithm proposed by Quinlan et al. [13] generates collision-free smooth paths by generating discontinuous initial paths and then optimizing the path shapes using a “rubber band” deformation model. The optimization-based algorithm could be used for real-time path planning, but it is easy to fall into a local optimum and time-consuming, especially when there are a lot of obstacles [14].
In recent years, the intelligent method has progressed highly and applied wildly. This kind of algorithm can adapt to the environment with many obstacles and continuously obtain new information in the planning. The algorithm can usually play a good role in optimizing the result. Volkan et al. [15] applied GA to UAV path planning resulting in an outcome that satisfies the flight requirements. Although this method produces good results, its drawbacks include slow operation, a high resource requirement, and a propensity for the optimum local problem. The Ant Colony Optimization (ACO) algorithm has strong distributed computing capabilities and can improve computing efficiency, but its problem is also easy to fall into the local optimum in the initial stage. Some studies improved the efficiency of algorithms by optimizing the information transmitted, and some algorithms made up for their shortcomings through algorithms [16,17,18]. The Neural Network algorithm is a method concerning the principle of the human brain. It can make the algorithm adapt to the new environment through a lot of learning. Sung et al. [19] applied the neural network algorithm to the path planning of autonomous driving, and based on a lot of training, the effect is good. Compared to other situations, the Neural Network algorithm requires many data in training and is complicated to construct. Khan et al. [20,21] propose an algorithm based on a metaheuristic optimization algorithm and use adaptive moment estimation to improve its stability and convergence.
Sampling-based algorithms are mainly divided into Probabilistic Roadmap Method (PRM) algorithms and Rapidly Random Tree (RRT) algorithms. Ravankar et al. [22] proposed a method combining probability with improving the algorithm’s result and efficiency. Dekker et al. [23] improved the effect of path planning by optimizing the order of planning points. The PRM algorithm works well in high-dimensional space, but the path planning algorithm is easy to fail due to its large amount of computation [24]. Currently, the RRT algorithm receives much attention, while it is widely used in planes, space, and other fields [25]. It avoids the massive workload of modeling the environment and infinitely magnifies the possibility of finding a path [26,27], as the algorithm is relatively stable and runs efficiently. In the process of the RRT algorithm’s development, researchers have proposed a series of improving methods. One of the most popular improvements by Liu et al. [28] was adding a probability module to the standard RRT algorithm. It lessened unpredictability and enabled trees to be constructed with a high probability in the direction of the target point. Additionally, using additional trees was a popular enhancement to make the algorithm more effective. [29,30]. The RRT algorithm starts with two or more points and respective generations of a tree and then connects the start and target points [31]. One of the most critical and revolutionary improvements to the RRT algorithm is the RRT* algorithm, which keeps optimizing the planned path in the continuous nodes generated and modifying the planned path. However, the RRT algorithm suffers from high randomness and non-optimal path solutions.
In conclusion, the traditional algorithms have poor applicability in inland waterways. Usually, they only have low-resolution paths and are prone to local optima. Intelligent algorithms are inefficient in path planning, especially in complex inland waterways with many obstacles. They require many learning data and usually take time to run the algorithm. Sampling-based algorithms require less computation and run faster, but problems like large planning randomness exist.
To fill this gap, selecting a sampling-based algorithm seems to be the best choice to solve the complex obstacles in inland waters. The problem of high randomness and non-optimal path solutions in the RRT algorithm is the focus of this research. The Automatic Identification System (AIS) data is used to correct the results. The AIS is an important system currently used by ships, which can continuously obtain the GPS position and get the actual trajectory of ships [32]. Currently, the AIS data is widely used for the research of ship behavior analysis and data mining [33,34,35]. The specific steps of this research are as follows. Firstly, improvements are proposed for the RRT algorithm to improve the shortcomings. Secondly, the improved algorithm is applied to two scenarios to verify the rationality of the algorithm. Thirdly, the AIS average trajectory and the trajectory calculated by the algorithm are compared in this research to find out whether the path obtained by the improved algorithm conforms to the actual situation.
The remainder of this article is outlined as follows. The problem formulation is explained in Section 2. Then, the methodology based on the RRT algorithm, and its improvement is shown in Section 3. Section 4 presents a case study, followed by a discussion in Section 5. Finally, the conclusion is given in Section 6.
2. Problem Framework
In complex inland waters, ship accidents such as grounding and collisions caused by crews’ error judgment have occurred frequently [36,37]. Unlike autonomous planes and self-driving automobiles, ships usually have enormous inertia in water, and steering effectiveness decreases at a low speed. Therefore, the bridge team is under much pressure and is more likely to make mistakes in complex inland waters [38].
There are two main challenges when ships sail in complex inland waters. The first challenge is that too many obstacles could affect the crew’s judgment. It requires the bridge team to comprehensively consider all obstacles that may present a risk of collision and make correct judgments to avoid accidents. The second challenge is the change in water depth caused by tidal changes. It concerns the bridge team significantly since the route data keeps changing in complex waters [32]. For example, certain ships can only sail during high tide periods or navigate deep water routes, which requires judging the situation based on extra information. The risk of an accident will increase when the bridge team is not fully prepared before entering the complex waters [14,39].
Therefore, the advantage of the RRT algorithm in avoiding obstacles is used to assist inexperienced crew members in sailing in complex inland waters. The RRT algorithm can simplify the handling of obstacles to avoid collisions better. A trial-and-error approach generates the paths, thus eliminating any paths that might collide with obstacles. Through the improvements of the RRT algorithm, it quickly responds to the real-time channel data transmitted back and significantly improves the role that path planning plays in navigation safety. To deal with the tidal change, the RRT algorithm can simplify the changes in obstacles under the influence of tides. After querying the tide table, the dangerous shallow water areas will be directly regarded as new obstacles to avoid and solve the problem.
To further improve the algorithm, the randomness of exploration is reduced by adding variable probability parameters. The speed and accuracy of the algorithm are balanced in complex inland waterways. Even though there is already a collision-free program, this algorithm’s safety threshold can ensure the path keeps a safe distance and keep navigation safe again.
The framework of this research is shown in Figure 1. It includes questions raised, algorithm optimization, and result verification. In each part, three aspects are done in this study separately to better refine the algorithm of this article.
3. Methodology
In this section, the details of the algorithm are given, and some improvements are proposed according to the actual trajectory. Firstly, the digital model of ship movement is introduced. Secondly, continuous backtracking improves the RRT algorithm to find a suitable path. Thirdly, smooth and collision detection are also used to make the algorithm ideal for ship path planning in complex inland waters.
3.1. Mathematical Model
In the process of improving the RRT algorithm, the motion model of the ship is used in this research. According to the ship’s mathematical motion model, the following parts are introduced and modified.
Firstly, a mathematical motion model of the ship in the 2D plane is introduced in the ship motion and control field. The most crucial consideration is the changing heading course (Ψ) and sailing trajectory (x0, y0). For most ships, heaving, pitching, and rolling motions have little effect on the motion in the horizontal plane, so the three parameters of ψ, x0, and y0 will only depend on the forward velocity (μ), the lateral velocity (υ) and the yawing velocity (γ). Then the ship’s motion problem is simplified to a motion problem of three degrees of freedom. The specific formulas are listed below.
In addition, the basic RRT algorithm’s way of exploring with a single particle as the origin has been replaced. A circle with an adjustable radius is used as the model for path planning, and it can meet the sailing requirements of the safe distance. It means that the computational speed of the algorithm is hardly affected, and it can keep a safe distance between the ships and different obstacles.
3.2. RRT Algorithm
The Rapidly Random Tree (RRT) algorithm is a sampling-based motion planning algorithm that has been widely developed and applied over the past ten years [27]. It was first used for robot path planning and helped to find a collision-free path from an area containing static or moving obstacles [40]. The problems in spatial obstacle modeling have been avoided to give the algorithm massive advantages in trajectory planning.
As shown in Figure 2, the principle of the RRT algorithm is to take the initial point (q-start) as the root node, select a random node (q1) through a random algorithm, and search for the closest node (q2) to the node (q1) on the tree. Then the nearest node (q2) will be taken as the origin, proceeds to the next step of exploration according to the set distance value (ε), and undergoes a collision test. If the path does not collide with the obstacle, the new node (q3) will be added to the tree for sampling in the next step when the node (q3) is reasonable. If there is a collision, it will go back to the previous step, re-expand randomly and proceed to the following iteration. The process will continue till the target node (q-final) is successfully added to the tree connecting the initial node (q-start) and the target node (q-final) or till the preset maximum number of iterations is exceeded.
Although the basic RRT algorithm can complete the path planning, it has redundant and protruding points in the planned path. This makes the path seem “rough” in the generated image [41] and unsuitable for ship path planning in complex inland waters. This research focuses on optimizing the algorithm according to the characteristics of inland navigation.
3.3. Improved RRT Model
To solve the low accuracy of the route planned by the RRT algorithm, a series of improvements are made based on the algorithm, including path shearing, path smoothing, and safety distance reserving.
3.3.1. Path Shearing
To achieve the best connection between the start point and the target point, one of the most commonly used algorithms is the “Douglas-Puck” algorithm [42]. The principle of the algorithm is to approximate the tortuous route as a series of points, then the starting point and the target point are connected to get a connecting line. The next step is removing other points that are too close to the line. Then, the undeleted points will be connected in turn, and the points too close to each line segment will be deleted. After repeating the above operations, a simplified path will get at last. The “Douglas-Puck” algorithm provides a promising research direction. The RRT shearing method proposed in this research can repeatedly simplify the path tracing and improve the ship path planning algorithm in complex inland waters.
Specifically, the shearing strategy is generated by considering motion constraints. Firstly, the algorithm determines whether the initially planned path can be connected straight without crossing any obstacle. Then, it continues to trace back the generated path when the path cannot be directly connected and add the new tree to the tree which is connected to the nearest node. The algorithm searches each node within the set radius to find the shortest path without collision with obstacles. After that, new nodes which meet the above conditions will be added to the new tree and connected to the original tree. The shortest path solution is obtained by repeating the above processes, and these processes minimize the “divergence phenomenon” caused by the RRT algorithm.
The principle of the shearing algorithm is given in Figure 3. The planned path is from s-start to s-final, with seven points between them. The process starts back-tracking from s-final and finds the node in the purple area of s-final. Then it will select the most direct green path and connect s-final to point s4 when there is no obstacle in the range. Finally, the algorithm will continue back-tracing until the “s-start” and “s-final” connect. All these works make the algorithm find the shortest path to avoid obstacles.
3.3.2. Path Smoothing
Considering the actual motion of the ship, the path sheared fails to fit the turning point of the ship, and the curve’s inflection point does not conform to the steering law of the vessel. The new path smoothing method used in this research is based on the shearing algorithm and can deal with the inflection points in the sheared path. As shown in Figure 4, the black path is the initial path calculated by the algorithm, the black dots are the inflection points, and the grey parts are the discarded parts of the exploration. The principle of the algorithm is to obtain the specific parameter data of the points before and after the inflection point. Then, the third point outside the tree is picked and connected with points 1 and point 2, while making sure the path will bypass obstacles.
Combining with the smooth path proposed by Li et al. [43], the points mentioned above are used to generate a Three-order B-spline Curve as the arc path, and the result is the blue line. The Three-order B-spline Curve is suitable for ship motion and can also be obtained by the spline basis function as follows:
In this function, P(x) denotes the general equation of the B-spline curve, polynomial containing x is the basic function in the equation, “” denotes the characteristic point of the control curve. “x” denotes the ship’s swinging radius parameter, where a larger x indicates that the propagation requires a larger turning radius. For large container ships, large liners, etc., the algorithm scales back the value of “x”, so that the curvature can be bigger than before. For smaller yachts, fishing boats, etc., which are easy to operate, the algorithm sets the value of “x” large, so that the curvature is smaller than before. The above improvements cover the shortage of the RRT algorithm to the greatest extent and significantly improve the applicability.
3.3.3. Safety Distance Reserving
To further improve the safety of the path-planned algorithm, an independent collision detection function is added to prevent the final path from approaching obstacles during the test. Moreover, it ensures that a set distance (λ) is kept between the whole path and the obstacles. In addition, this function can be used to determine whether a ship can pass through a narrow water area by changing the set value of the safety distance. In this way, the application scope of the ship path planning algorithm in complex inland waters is further expanded.
In summary, the path generated by the proposed methods could meet the actual ship trajectories. The traditional problems of the RRT algorithm, such as the shortest path problem could be solved by the shearing method. In addition, the tortuous path problem could be solved by the smoothing method, and the safety distance reserving method could ensure the path planning results in safety for navigation.
4. Case Study
PyCharm (Python Integrated Development Environment) is being used on Personal Computer for the case study in this article. Two water areas with different navigation conditions are used in this research, and 10 tests were carried out for each scenario. Through comparison, it can be judged whether the randomness of the RRT algorithm has been greatly reduced.
4.1. Set Up
As shown in Figure 5, a rectangular area with a length of 20 km and a width of 20 km is selected when realizing the path algorithm in the water area of the Yangtze River Channel in Shanghai. The algorithm has five shore-based obstacles and two restricted navigation areas. In this algorithm, the length of one unit represents the actual distance of 1 km. The river courses are completely reflected in the map available for the algorithm. A rectangular area with a length of 10 km and a width of 10 km is selected when realizing the path algorithm in the water area of the Yangtze River Channel in Zhenjiang. This algorithm obtains 800 units in length and width respectively. Each unit represents a length of 0.0125 km. There are two shore-based obstacles and two navigable restricted areas, and they are fully reflected in the map available for the algorithm. In addition, the basic parameters set by the RRT algorithm are shown in Table 1.
The lower left corner of the map is selected as the coordinate origin, the longitude is the x-axis direction, and the latitude is the y-axis direction. The points falling on the calculated average path have been selected as the starting and target points. The coordinates of the starting point and the target point are shown in Table 2.
To reflect the planning effect more intuitively, the AIS data is collected and processed. Firstly, this research selected all the trajectories of ships sailing in the right direction from 00:00 26 August 2021, to 00:00 29 August 2021. Secondly, as shown in Figure 6, the waterways were divided into 10 segments equally by longitude. Thirdly, latitude information for ships sailing in the correct direction at the selected longitude was gathered and added to the coordinate axes. The average latitude of each ship at a specific longitude position could be calculated as the data accumulates to a large number. Finally, these points were connected to calculate the true average trajectory of the ship and compared with the path planned by the algorithm.
To show the validity of the planned path, a Mean Relative Error (MRE) method was adopted to compare the real trajectories with those planned by the algorithm. The specific calculation function is as follows:
In this function, parameter “” denotes the error rate, and parameter “∆y” denotes the relative error between the actual average trajectory and the result planned by the algorithm. Parameter “y” denotes the width of the waterway in the y-axis direction.
4.2. Results
The improved RRT algorithm is used in two different scenarios and gets good results. As shown in Figure 7, the dark green part represents the shore-based land, and the blank area represents the navigable area. The solid black line connecting the starting point and the target point is the primary path generated by the RRT algorithm, and the grey parts are the discarded parts of the exploration. The red line is the new path obtained by the improved shearing algorithm, and the blue line is the result formed by the path smoothing algorithm. In scenario 1, the blank part represents the navigable area surrounded by navigation marks. It takes 0.25 s on simulation, and the algorithm has completed 144 times of path planning in the correct direction. In scenario 2, the blank part represents the navigable area surrounded by navigation marks. It takes 1.66 s on simulation, and the algorithm has completed 84 times of path planning in the correct direction. The result shows that the algorithm can find a smooth path between the starting and end points to meet the actual sailing needs.
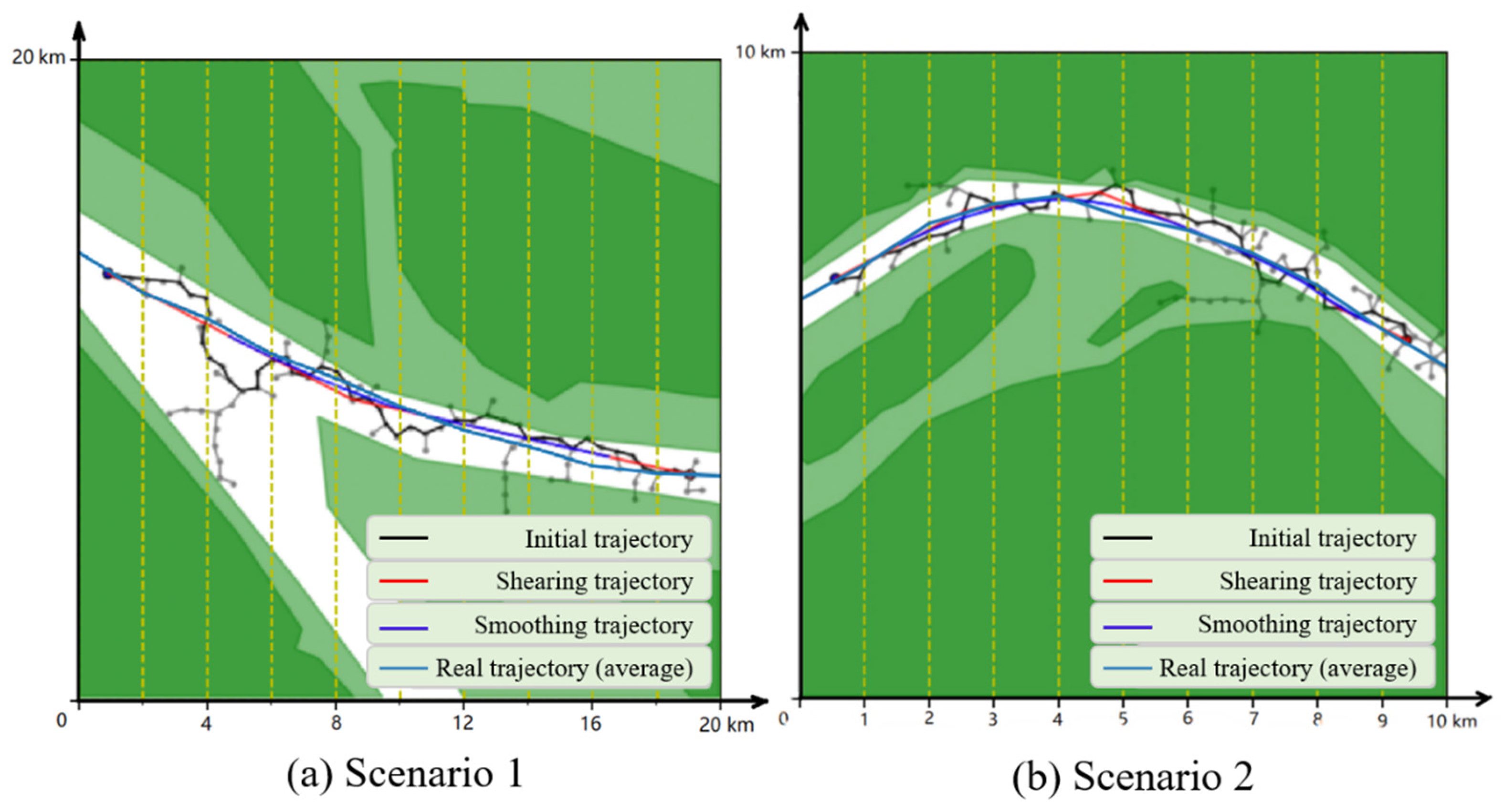
In Figure 8, the light blue line is the real trajectory (average) of the ship. Compared with the results generated by the algorithm with the real trajectory of the two scenarios, the path planned by the algorithm conforms to the natural trajectory to a large extent. It meets the actual navigation requirements and has better fitness. Scenario 1 and scenario 2 are simulated 10 times using the proposed model respectively. The average error and the maximum error of each test are shown in the following Table 3 and Table 4. Among them, test 4 in scenario 1 and 6 in scenario 2 are shown in Figure 8.
In the ten tests on the channel in scenario 1, the lowest average error rate is 2.88%, the highest average error rate is 4.1%, and the average error rate is 3.38%. In the ten tests on the channel in scenario 2, the lowest average error rate is 1.85%, the highest average error rate is 3.44%, and the average error rate is 2.43%. In both scenarios, the average maximum error rates are under 8%, indicating that the improved RRT algorithm meets the navigation requirements for controlling the overall error.
In conclusion, the improved RRT algorithm could be used to assist the path planning of ships in complex inland waters. The RRT algorithm does not need to be based on obstacles during operation and does not require a precise topographic map. RRT algorithm can get the desired results efficiently and accurately, making the path planning result safe for navigation.
5. Discussion
Compared with ship navigation in open areas, the factors affecting ship navigation in inland rivers are more complex [44]. It has been shown that 94.7% of collision accidents are related to human errors [37]. Among human errors, the bridge team’s negligence or unfamiliarity with the channel has become the main reason for the accidents [36,45]. Therefore, better ship path planning is crucial for the improvement of inland navigation safety [46]. Excellent path planning can assist the bridge team in navigation and great room for development in the future.
The improved RRT algorithm used in this paper has several advantages. Firstly, this algorithm avoids path planning being interrupted by the algorithm itself. Secondly, this algorithm has great planning results due to the improvement in the RRT algorithm through the RRT back-tracing method. Thirdly, the improved RRT algorithm can be applied to real-time path planning owing to its high efficiency and low computational complexity.
From a comparison with other algorithms, in a study using the APF algorithm, the repulsive forces may cancel each other out to a certain extent, resulting in a failure of the algorithm running. Also, too many obstacles around the target point may cause the repulsive force too strong to make the path connecting the target point [47]. The RRT algorithm can reach any target point which is not surrounded by obstacles if the parameters setting is reasonable. In the existing research, methods used for ship path planning include the Raster algorithm and the Dijkstra algorithm [8]. The results generated by them show the most common problem of insufficient matching. Apparent deviations between the trajectory calculated by other algorithms and the actual trajectory of the ship in complex waters lead to the results not being applied in actual navigation. The error rate of the path planned by the improved RRT algorithm is within the controllable range and can be applied to actual navigation when compared with the path planning result obtained by the improved RRT algorithm and the average path of the actual navigation. Moreover, the path planning algorithms are more likely to get into trouble when calculating departures from ports [48]. For example, with the APF algorithm, the ship can only get away from obstacles as soon as possible. But the improved RRT algorithm can simulate the situation that the ship is sailing slowly away from the port. In addition to the above algorithms, the intelligent algorithm often delivers excellent results [16,17]. However, its low speed is difficult to use in complex inland waters with multiple scenes and obstacles. In this research, the improved RRT algorithm shows higher efficiency in dealing with path planning in complex waters. In summary, the result shows that the planned path is more secure, and all the planned paths conform to the actual navigation.
At present, the improved RRT algorithm could have several applications. Firstly, it can assist the ship’s path planning, while crews can refer to the results obtained by the algorithm and improve the existing path planning. Secondly, this algorithm can be applied to the operation of unmanned boats. Only by entering the target point and standard chart into the boat’s computer, can the path planning and the preparations for the boat’s sailing be completed. Thirdly, with the combination of the Electronic Chart Display and Information System (ECDIS), it can take advantage of algorithms in practical applications [39]. For example, it can be combined with the ECDIS and guide inland navigation and further enhance safety in navigation. Fourthly, the path planning results used by the bridge team can be sent to vessel traffic service (VTS) to further improve the efficiency of VTS in ship management.
6. Conclusions
In this paper, the RRT algorithm has been improved by the shearing, smooth and safety distance reserve methods. The improved RRT method was used for ship path planning in inland rivers. Then, a case study including two different waterways was carried out to verify the model on the Yangtze River. In the case study, ten tests were completed for each waterway. At the same time, the actual ship trajectories of the two waterways were obtained and used for results comparison in this research. The MRE method was used for the comparison, and the results showed that the improved RRT algorithm has a high fitting degree for ship path planning in this research.
Two primary areas will be the focus of future research. Firstly, the algorithm can be used for real-time dynamic path planning when other ships appear in the path. In dynamic planning, the dynamic motion paths of other ships will be taken into consideration to avoid collisions. This can be used to a certain extent as the assistance of the unmanned ship. Secondly, the algorithm can further improve with the detailed models of different ships and be used to create a new risk identification system. In this way, the algorithm can be extended to three-dimensional space to decrease the risk when the ship encounters extremely irregular obstacles or abnormal underwater topography.
Author Contributions
Conceptualization, P.F. and T.Y.; methodology, S.C. and Y.S.; software, C.X. and F.X.; validation, P.F. and J.D.; formal analysis, J.D.; resources, T.Y. and C.X.; data curation, F.X.; writing—original draft preparation, S.C.; writing—review and editing, S.C. and Y.S. All authors have read and agreed to the published version of the manuscript.
Funding
This research was supported by the National Natural Science Foundation of China (NSFC) under Grant No.52271369, 52031009.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
The data presented in this study are openly available in FigShare at https://doi.org/10.6084/m9.figshare.21265326.v1.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Yan, T.; Qian, D.Y.; Shu, Y.Q.; Yang, Y.P.; Xu, R. Vessel navigation risk and stern-swing index in sharp bend channels. Ocean. Eng. 2021, 238, 109640. [Google Scholar] [CrossRef]
- Ma, J.; Jia, C.F.; Shu, Y.Q.; Liu, K.Z.; Zhang, Y.; Hu, Y.L. Intent prediction of vessels in intersection waterway based on learning vessel motion patterns with early observations. Ocean. Eng. 2021, 232, 109154. [Google Scholar] [CrossRef]
- Shen, Q.Z. Study on the Risk of Inland Traffic Safety; Dalian Maritime University: Dalian, China, 2017. [Google Scholar]
- Aalberg, A.L.; Bye, R.J.; Ellevseth, P.R. Risk Factors and Navigation Accidents: A Historical Analysis Comparing Accident-Free and Accident-Prone Vessels Using Indicators from AIS Data and Vessel Databases; Maritime Transport Research; Elsevier: Amsterdam, The Netherlands, 2022; Volume 3, p. 100062. [Google Scholar]
- Khatib, O. Real-Time Obstacle Avoidance for Manipulators and Mobile Robots. In Proceedings of the IEEE International Conference on Robotics and Automation, St. Louis, MO, USA, 25–28 March 1985; pp. 500–505. [Google Scholar]
- Johnson, D.B. A note on Dijkstra’s shortest path algorithm. J. ACM 1973, 20, 385–388. [Google Scholar] [CrossRef]
- Hart, P.E.; Nilsson, N.J.; Raphael, B.A. Formal Basis for the Heuristic Determination of Minimum Cost Paths. IEEE Trans. Syst. Sci. Cybern. 1973, 4, 28–29. [Google Scholar] [CrossRef]
- Wang, H.L.; Mao, W.G.; Eriksson, L. A Three-Dimensional Dijkstra’s algorithm for multi-objective ship voyage optimization. Ocean. Eng. 2019, 186, 106131. [Google Scholar] [CrossRef]
- Stentz, A. Optimal and efficient path planning for partially known environments. In Intelligent Unmanned Ground Vehicles; Springer: Boston, MA, USA, 1997; pp. 203–220. [Google Scholar]
- Saranya, C.; Unnikrishnan, M.; Ali, A.S.; Sheela, D.S.; Lalithambika, V.R. Terrain Based D∗ Algorithm for Path Planning. IFAC-PapersOnLine 2016, 49, 178–182. [Google Scholar] [CrossRef]
- Dolgov, D.; Thrun, S.; Montemerlo, M. Path planning for autonomous vehicles in unknown semi-structured environments. Int. J. Robot. Res. 2010, 29, 485–501. [Google Scholar] [CrossRef]
- Ratliff, N.; Zucker, M.; Bagnell, J.A.; Srinivasa, S. CHOMP: Gradient Optimization Techniques for Efficient Motion Planning. In Proceedings of the 2009 IEEE International Conference on Robotics and Automation, Kobe, Japan, 12–17 May 2009; pp. 489–494. [Google Scholar]
- Quinlan, S.; Khatib, O. Elastic Bands: Connecting Path Planning and Control. In Proceedings of the IEEE International Conference on Robotics and Automation, Atlanta, GA, USA, 2–6 May 1993. [Google Scholar]
- Gan, L.X.; Yan, Z.X.; Zhang, L.; Liu, K.Z.; Zheng, Y.Z.; Zhou, C.H.; Shu, Y.Q. Ship path planning based on safety potential field in inland rivers. Ocean. Eng. 2022, 260, 111928. [Google Scholar] [CrossRef]
- Volkan, Y.; Pehlivanoglu, P. An enhanced genetic algorithm for path planning of autonomous UAV in target coverage problems. Appl. Soft Comput. 2021, 112, 107796. [Google Scholar]
- Dong, Z.R.; Bian, X.Y.; Zhao, S. Ship pipe route design using improved multi-objective ant colony optimization. Ocean. Eng. 2022, 258, 111789. [Google Scholar] [CrossRef]
- Güven, A.F.; Yörükeren, N.; Samy, M.M. Design optimization of a stand-alone green energy system of university campus based on Jaya-Harmony Search and Ant Colony Optimization algorithms approaches. Energy 2022, 253, 124089. [Google Scholar] [CrossRef]
- Zhou, Y.; Li, W.D.; Wang, X.M.; Qiu, Y.M.; Shen, W.M. Adaptive gradient descent enabled ant colony optimization for routing problems. Swarm Evol. Comput. 2022, 70, 101046. [Google Scholar] [CrossRef]
- Sung, I.; Choi, B.; Nielsen, P. On the training of a neural network for online path planning with offline path planning algorithms. Int. J. Inf. Manag. 2021, 57, 102142. [Google Scholar] [CrossRef]
- Khan, A.H.; Li, S.; Chen, D.C.; Liao, L.F. Tracking control of redundant mobile manipulator: An RNN based metaheuristic approach. Neurocomputing 2020, 400, 272–284. [Google Scholar] [CrossRef]
- Khan, A.H.; Cao, X.; Li, S.; Katsikis, V.N.; Liao, L. BAS-ADAM: An ADAM based approach to improve the performance of beetle antennae search optimizer. IEEE CAA J. Autom. Sin. 2020, 7, 461–471. [Google Scholar] [CrossRef]
- Ravankar, A.A.; Ravankar, A.; Emaru, T. HPPRM: Hybrid Potential Based Probabilistic Roadmap Algorithmfor lmproved Dynamic Path Planning of Mobile Robots. IEEE Access 2021, 8, 221743–221766. [Google Scholar] [CrossRef]
- Dekker, I.; Kellens, K.; Demeester, E. Optimisation of the combined application planning and execution time utilising repeated PRM replanning for point-to-point sequences. Procedia CIRP 2021, 103, 286–291. [Google Scholar] [CrossRef]
- Li, X.X.; Ma, X.L.; Wang, X.P. Overview of Path Planning Algorithms for Mobile Robots. Comput. Meas. Control. 2022, 30, 9–19. [Google Scholar]
- Lavalle, S.M.; Kuffner, J.J. Rapidly-exploring random trees: Progress and prospects. Algorithmic Comput. Robot. 2001, 5, 293–308. [Google Scholar]
- Liao, B.; Wan, F.Y.; Hua, Y.; Ma, R.R.; Zhu, S.R.; Qing, X.L. F-RRT*: An improved path planning algorithm with improved initial solution and convergence rate. Expert Syst. Appl. 2021, 184, 115457. [Google Scholar] [CrossRef]
- Hess, R.; Kempf, F.; Schilling, K. Trajectory Planning for Car-Like Robots using Rapidly Exploring Random Trees. IFAC Proc. Vol. 2013, 46, 44–49. [Google Scholar] [CrossRef]
- Liu, H.; Wang, C.Q. Collision Probability based Safe Path Planning for Mobile Robots in Changing Environments. Appl. Mech. Mater. 2012, 197, 401–408. [Google Scholar]
- LaValle, S.M.; Kuffner, J.J. Randomized kinodynamic planning. Int. J. Robot. Res. 2001, 20, 378–400. [Google Scholar] [CrossRef]
- Lin, H.I.; Yang, C.S. 2D-Span resampling of Bi-RRT in dynamic path planning. Int. J. Autom. Smart Technol. 2015, 5, 39–48. [Google Scholar]
- Wang, W.; Xu, X.; Li, Y. Triple RRTs: An effective method for path planning in narrow passages. Adv. Rob. 2010, 24, 943–962. [Google Scholar] [CrossRef]
- Shu, Y.Q.; Daamen, W.; Ligteringen, H.; Hoogendoorn, S.P. Influence of external conditions and vessel encounters on vessel behavior in ports and waterways using Automatic Identification System data. Ocean. Eng. 2017, 131, 1–14. [Google Scholar] [CrossRef] [Green Version]
- Kabir, M.; Kang, M.J.; Wu, X. Study on U-turn behavior of vessels in narrow waterways based on AIS data. Ocean. Eng. 2022, 246, 110608. [Google Scholar] [CrossRef]
- McWhinnie, L.H.; O’Hara, P.D.; Hilliard, C. Assessing vessel traffic in the Salish Sea using satellite AIS: An important contribution for planning, management and conservation in southern resident killer whale critical habitat. Ocean. Coast. Manag. 2021, 200, 105479. [Google Scholar] [CrossRef]
- Shu, Y.Q.; Wang, X.Y.; Huang, Z.Q.; Song, L.; Fei, Z.Q.; Gan, L.X.; Xu, Y.M.; Yin, J.C. Estimating spatiotemporal distribution of wastewater generated by ships in coastal areas. Ocean. Coast. Manag. 2022, 222, 106133. [Google Scholar] [CrossRef]
- Lazarowska, A. A Trajectory Base Method for Ship’s Safe Path Planning. Procedia Comput. Sci. 2016, 96, 1022–1031. [Google Scholar] [CrossRef] [Green Version]
- Ugurlu, H.; Cicek, I. Analysis and assessment of ship collision accidents using Fault Tree and Multiple Correspondence Analysis. Ocean. Eng. 2022, 245, 110514. [Google Scholar] [CrossRef]
- Yu, Y.; Chen, L.; Shu, Y.; Zhu, W. Evaluation model and management strategy for reducing pollution caused by ship collision in coastal waters. Ocean. Coast. Manag. 2021, 203, 105446. [Google Scholar] [CrossRef]
- Li, R.C.; Chen, N. Development of ship path planning simulator based on electronic charts. Electromechanical Equip. 2021, 38, 9–14. [Google Scholar]
- Zhang, L.; Zhang, Y.J.; Li, Y.F. Path planning for indoor Mobile robot based on deep learning. Optik 2020, 219, 165096. [Google Scholar] [CrossRef]
- Qureshi, A.H.; Ayaz, Y. Intelligent bidirectional rapidly-exploring random trees for optimal motion planning in complex cluttered environments. Rob. Auton. Syst. 2015, 68, 1–11. [Google Scholar] [CrossRef] [Green Version]
- Li, J. Application of Douglas-Peuker algorithm in automatic generation methods of shipping line. Ship Sci. Technol. 2017, 39, 76–78. [Google Scholar]
- Li, L.Y.; Wu, D.F.; Huang, Y.Q.; Yuan, Z.M. A path planning strategy unified with a COLREGS collision avoidance function based on deep reinforcement learning and artificial potential field. Appl. Ocean. Res. 2021, 113, 102759. [Google Scholar] [CrossRef]
- Liu, K.Z.; Yu, Q.; Yuan, Z.T.; Yang, Z.S.; Shu, Y.Q. A systematic analysis for maritime accidents causation in Chinese coastal waters using machine learning approaches. Ocean. Coast. Manag. 2021, 213, 105859. [Google Scholar] [CrossRef]
- Chen, D.J.; Pei, Y.L.; Xia, Q. Research on human factors cause chain of ship accidents based on multidimensional association rules. Ocean. Eng. 2020, 218, 107717. [Google Scholar] [CrossRef]
- Zhou, J.; Ding, F.; Yang, J.X.; Pei, Z.Q.; Wang, C.X.; Zhang, A. Navigation safety domain and collision risk index for decision support of collision avoidance of USVs. Int. J. Nav. Archit. Ocean. Eng. 2021, 13, 340–350. [Google Scholar] [CrossRef]
- Miao, D.D.; Lv, P.; Wang, Q.; Xu, H.M. Power inspection drone trajectory planning based on improved artificial potential field method. Comput. Digit. Eng. 2021, 49, 2260–2265. [Google Scholar]
- Shu, Y.Q.; Daamen, W.; Ligteringen, H.; Hoogendoorn, S.P. Vessel route choice theory and modelling. Transp. Res. Rec. 2015, 2479, 9–15. [Google Scholar] [CrossRef]
Figure 1.
Research framework.
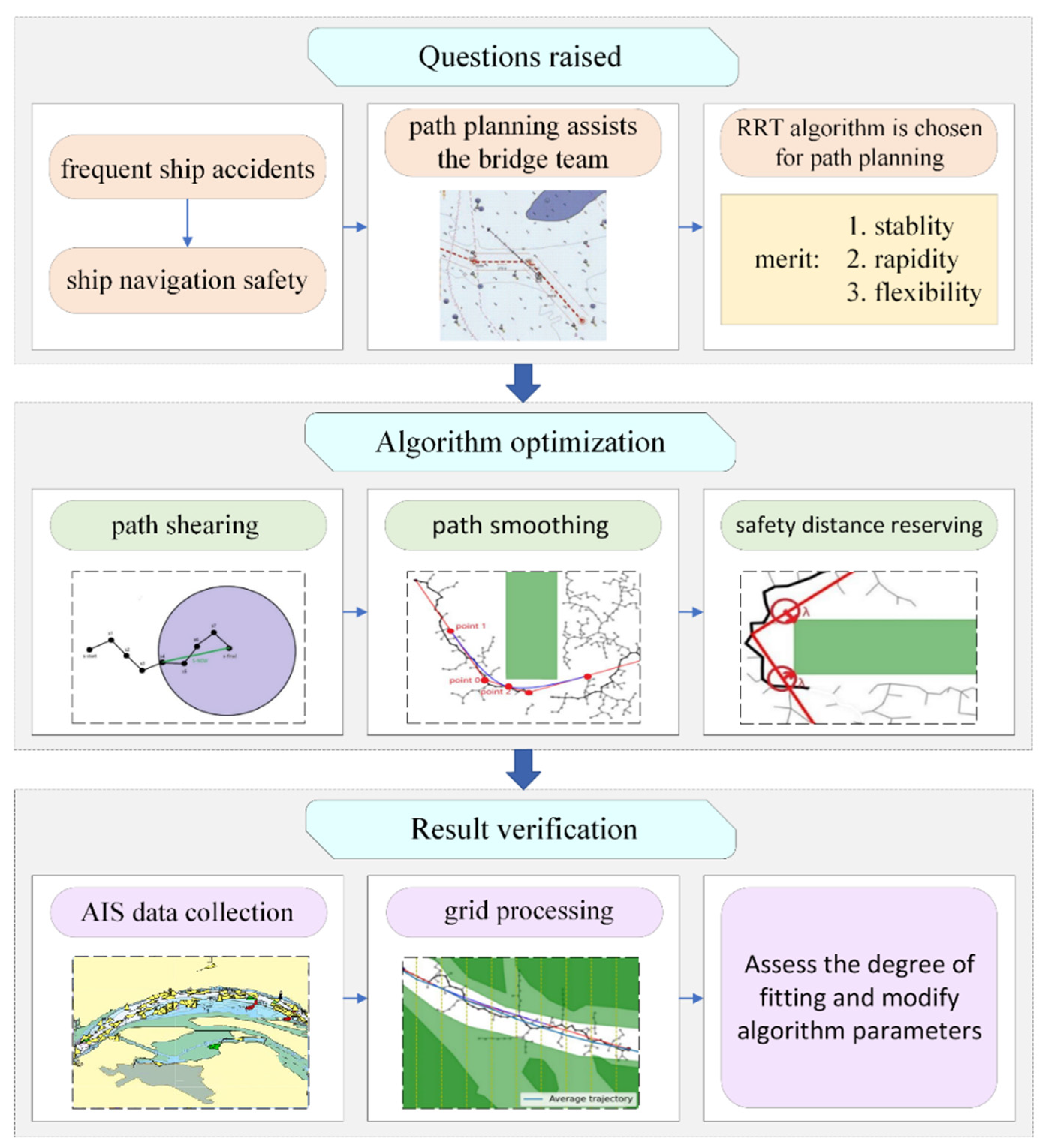
Figure 2.
Basic principles of RRT algorithm.

Figure 3.
RRT shearing principal diagram.

Figure 4.
The basic principle of path smoothing.
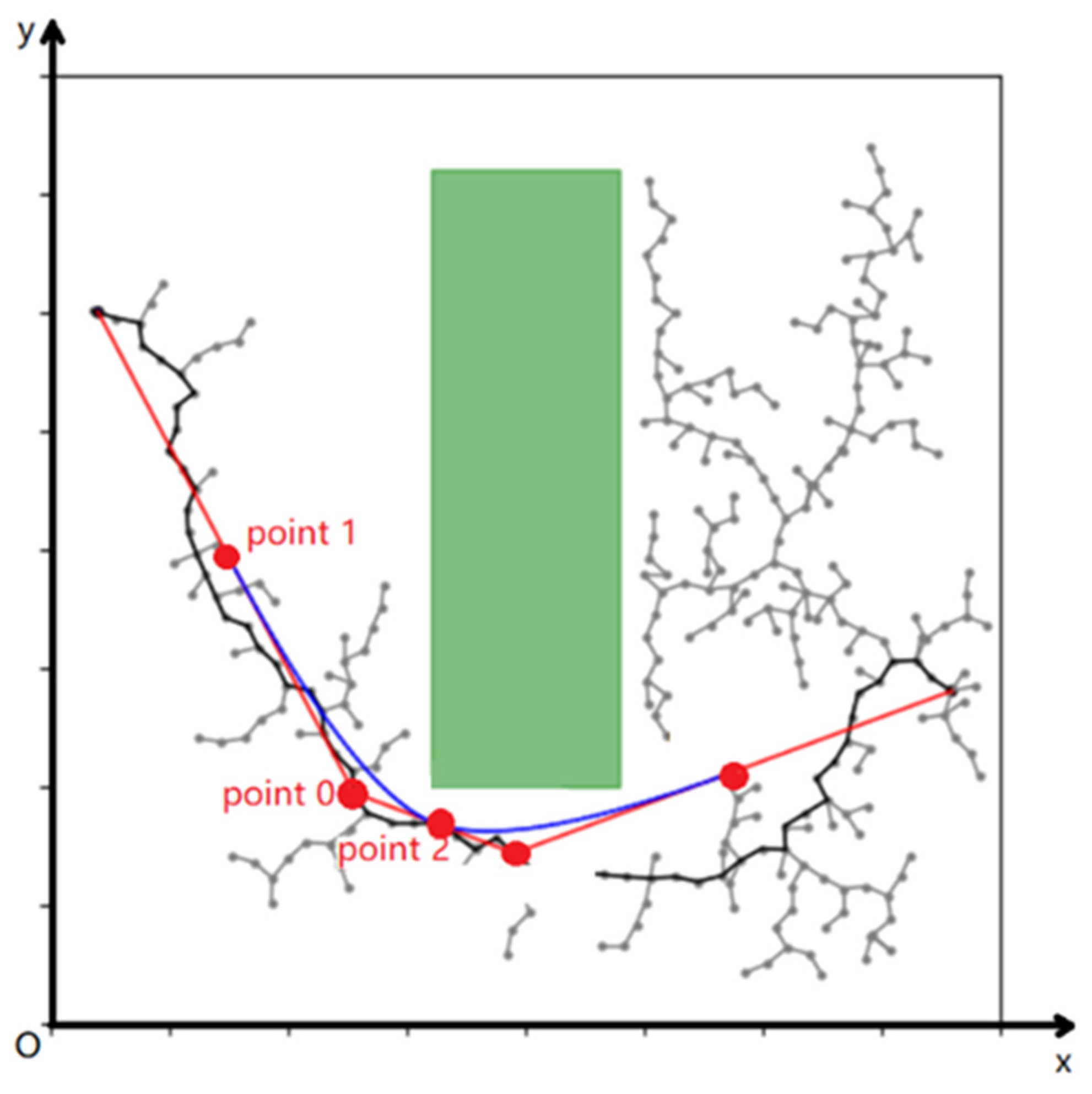
Figure 5.
(a) AIS data of all ships in the water area of the Yangtze River Channel in Shanghai at a certain time; (b) AIS data of all ships in the water area of the Yangtze River Channel in Zhenjiang at a certain time; (c) Geographic data in scenario 1; (d) Geographic data in scenario 2.
Figure 5.
(a) AIS data of all ships in the water area of the Yangtze River Channel in Shanghai at a certain time; (b) AIS data of all ships in the water area of the Yangtze River Channel in Zhenjiang at a certain time; (c) Geographic data in scenario 1; (d) Geographic data in scenario 2.

Figure 6.
(a) Cross sections used for result comparison in scenario 1; (b) Cross sections used for result comparison in scenario 2.
Figure 6.
(a) Cross sections used for result comparison in scenario 1; (b) Cross sections used for result comparison in scenario 2.

Figure 7.
(a) Simulation results in scenario 1; (b) Simulation results in scenario 2.
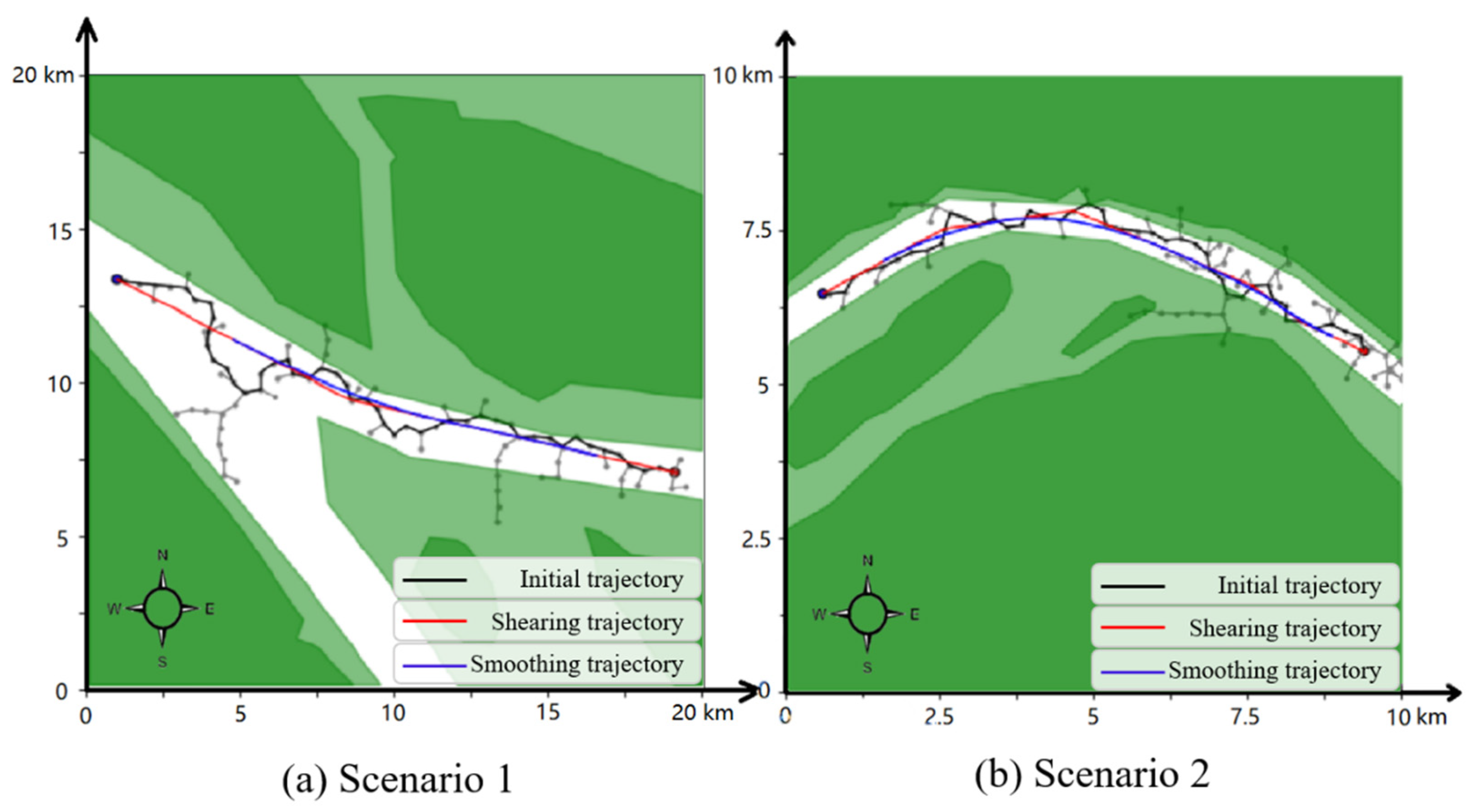
Figure 8.
(a) Comparison between the simulated path and real path in scenario 1; (b) Comparison between the simulated path and real path in scenario 2.
Figure 8.
(a) Comparison between the simulated path and real path in scenario 1; (b) Comparison between the simulated path and real path in scenario 2.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table 1.
The basic parameter settings of the algorithm.
| Parameter | Scenario 1 |
|---|---|
| Step-Size | 5 units |
| Iterations | 1000 times |
| Safe distance | 0.1 km |
Table 2.
The comparison of two scenarios.
| Scenario | Starting Point (km) | Starting Point (km) |
|---|---|---|
| Scenario 1 | (19, 5.75) | (1, 13.25) |
| Scenario 2 | (9.37, 11) | (0.6, 6.4) |
Table 3.
MRE between the simulated path and real path in scenario 1.
| Average Error Rate | Maximum Error Rate | |
|---|---|---|
| Test 1 | 2.92% | 9.52% |
| Test 2 | 3.73% | 7.87% |
| Test 3 | 3.33% | 8.22% |
| Test 4 | 2.98% | 6.76% |
| Test 5 | 3.29% | 10.10% |
| Test 6 | 4.10% | 7.32% |
| Test 7 | 3.55% | 7.87% |
| Test 8 | 2.88% | 9.21% |
| Test 9 | 3.11% | 6.67% |
| Test 10 | 3.89% | 6.33% |
| Average | 3.38% | 7.99% |
Table 4.
MRE between the simulated path and real path in scenario 2.
| Average Error Rate | Maximum Error Rate | |
|---|---|---|
| Test 1 | 2.23% | 7.43% |
| Test 2 | 2.11% | 6.90% |
| Test 3 | 1.88% | 6.98% |
| Test 4 | 2.48% | 7.53% |
| Test 5 | 3.11% | 8.33% |
| Test 6 | 1.85% | 6.67% |
| Test 7 | 1.90% | 7.22% |
| Test 8 | 2.67% | 8.43% |
| Test 9 | 2.64% | 7.88% |
| Test 10 | 3.44% | 8.20% |
| Average | 2.43% | 7.56% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Cao, S.; Fan, P.; Yan, T.; Xie, C.; Deng, J.; Xu, F.; Shu, Y. Inland Waterway Ship Path Planning Based on Improved RRT Algorithm. J. Mar. Sci. Eng. 2022, 10, 1460. https://doi.org/10.3390/jmse10101460
AMA Style
Cao S, Fan P, Yan T, Xie C, Deng J, Xu F, Shu Y. Inland Waterway Ship Path Planning Based on Improved RRT Algorithm. Journal of Marine Science and Engineering. 2022; 10(10):1460. https://doi.org/10.3390/jmse10101460
Chicago/Turabian StyleCao, Shengshi, Pingyi Fan, Tao Yan, Cheng Xie, Jian Deng, Feng Xu, and Yaqing Shu. 2022. "Inland Waterway Ship Path Planning Based on Improved RRT Algorithm" Journal of Marine Science and Engineering 10, no. 10: 1460. https://doi.org/10.3390/jmse10101460
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.