
Numerical Simulation of Fully Coupled Flow-Field and Operational Limitation Envelopes of Helicopter-Ship Combinations


Abstract
:1. Introduction
1.1. Background
1.2. Past Works
1.3. Objectives of the Current Work
2. Materials and Methods
2.1. Governing Equations
2.2. Steady AD model
2.3. Resolved Blade Method
2.4. Helicopter Flight Mechanics Model
2.5. Coupling Method
2.6. Numerical Setup
2.7. Rejection Criteria
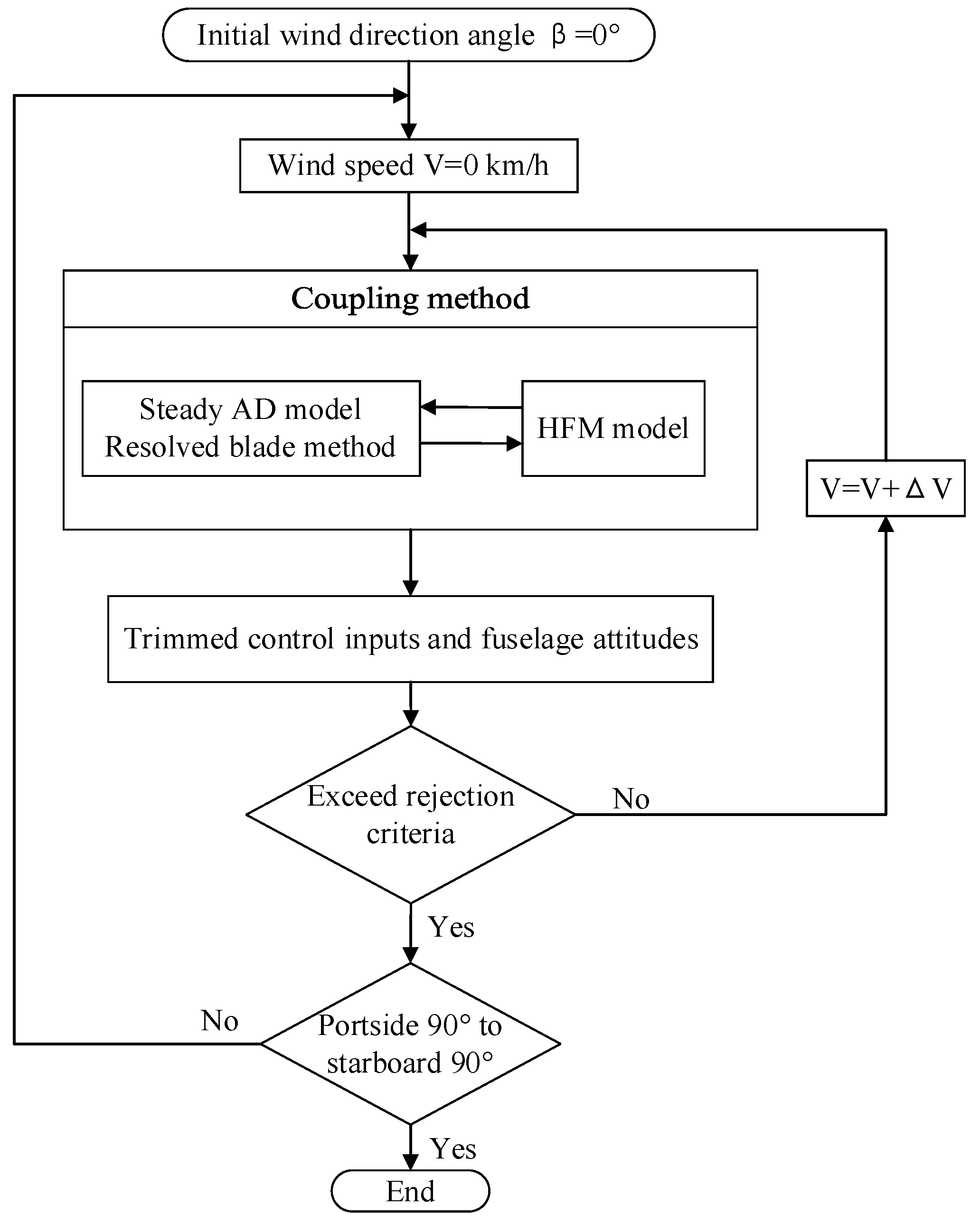
2.8. Establishment Method of Candidate SHOL
- The initial wind direction angle β is 0°;
- Set the initial wind speed V is 0 km/h;
- By using the coupled method, the trimmed control inputs and fuselage attitudes of the shipborne helicopter are calculated;
- Judge whether the rejection criteria are exceeded or not. If they have not been exceeded, the wind speed will increase by 5 km/h, and the iteration is returned to Step 3; if it has been exceeded, the corresponding wind speed is the safety boundary under the current wind direction angle;
- Increase wind direction angle by 30° and return to Step 2 until the wind direction angle covers portside 90° to starboard 90°.
3. Results
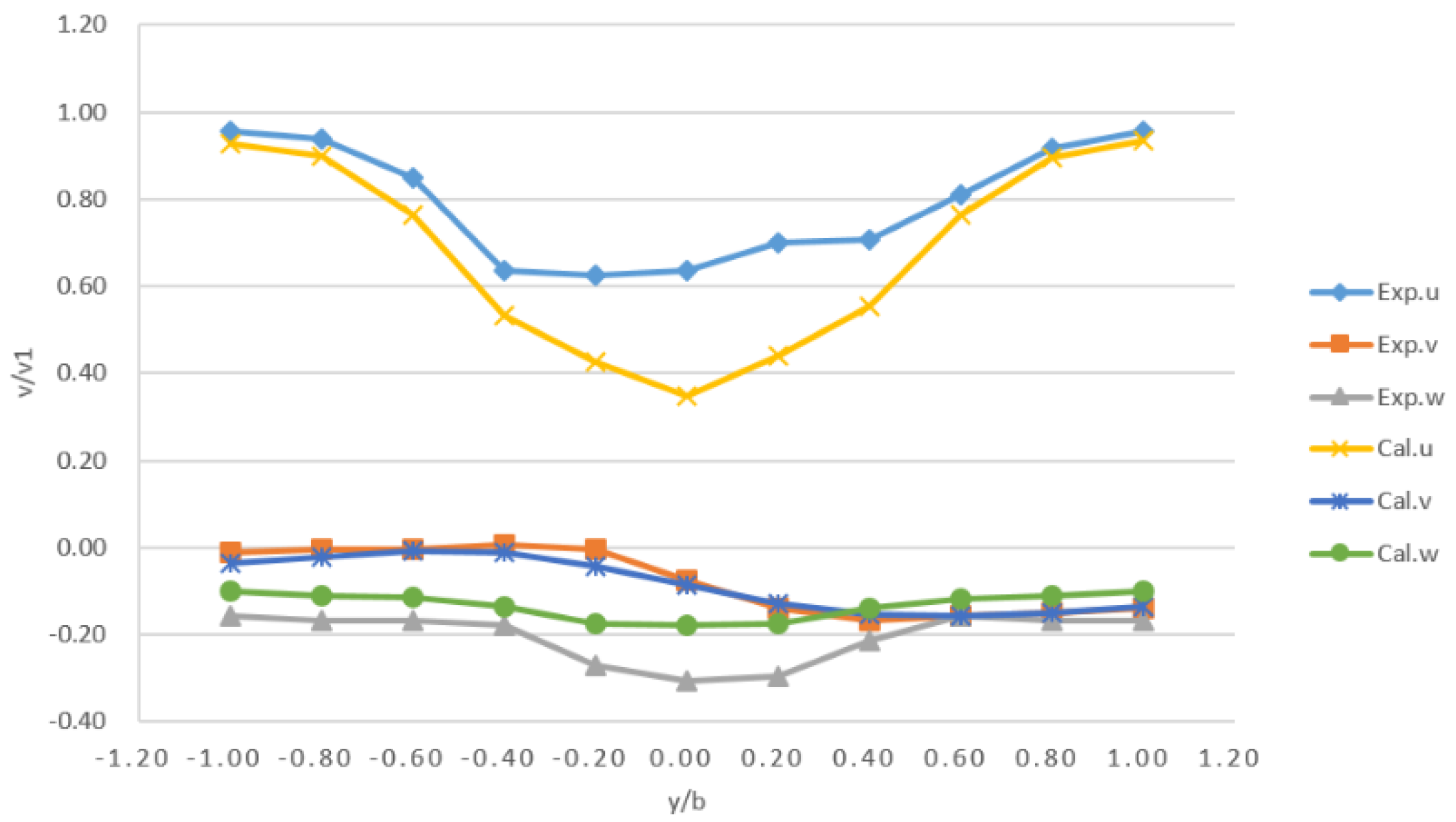
3.1. Validation
3.2. Mesh Independence Study
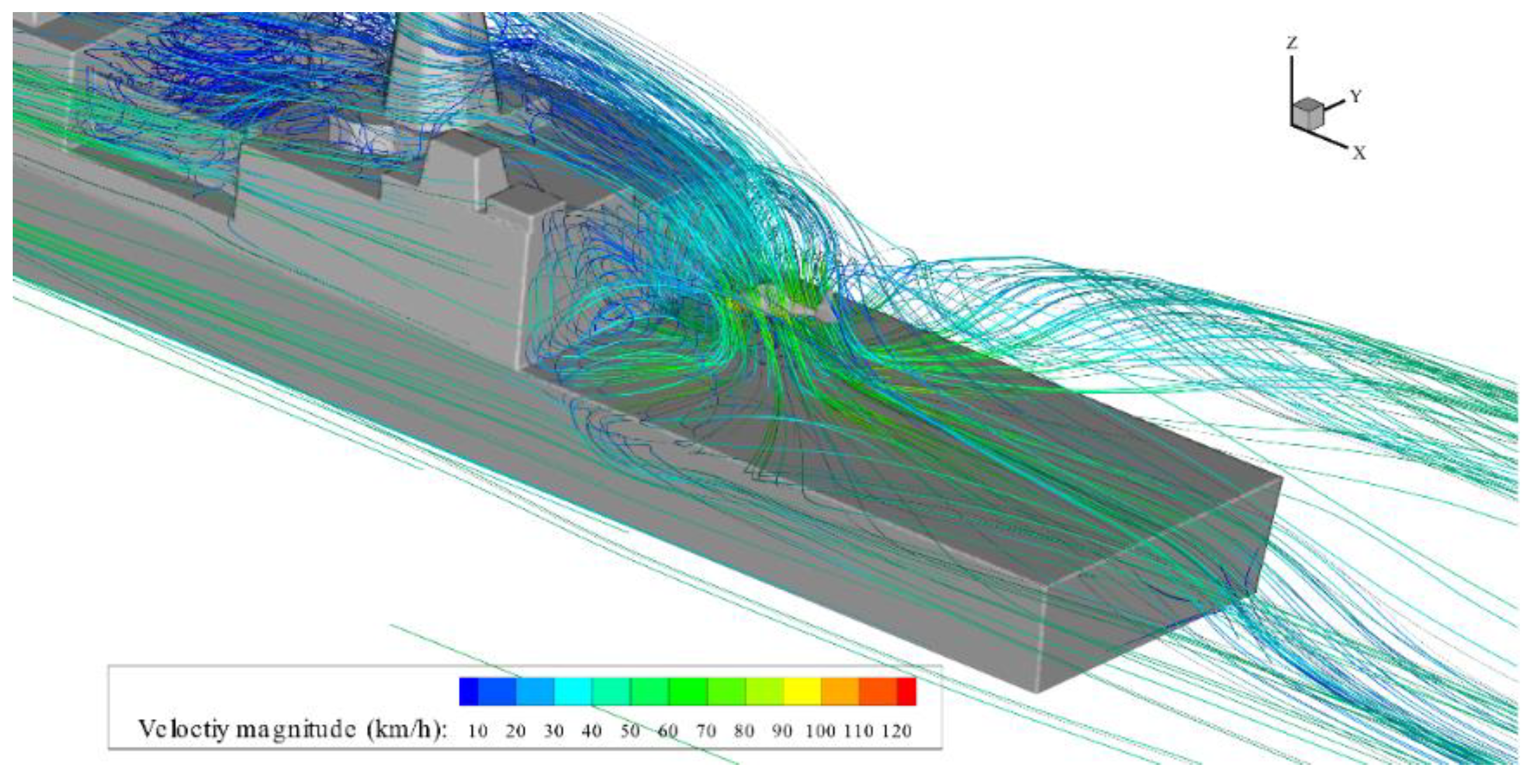
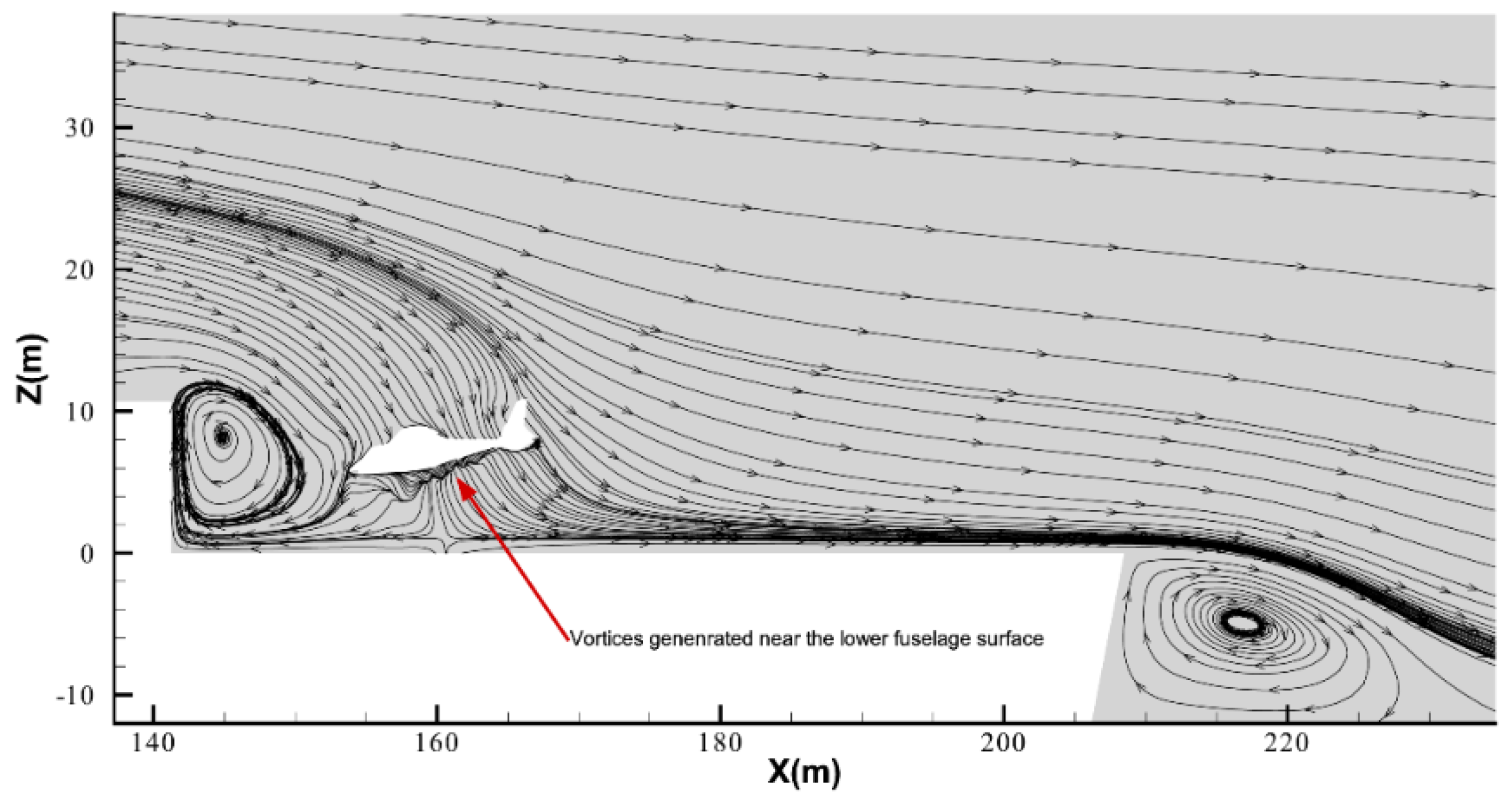
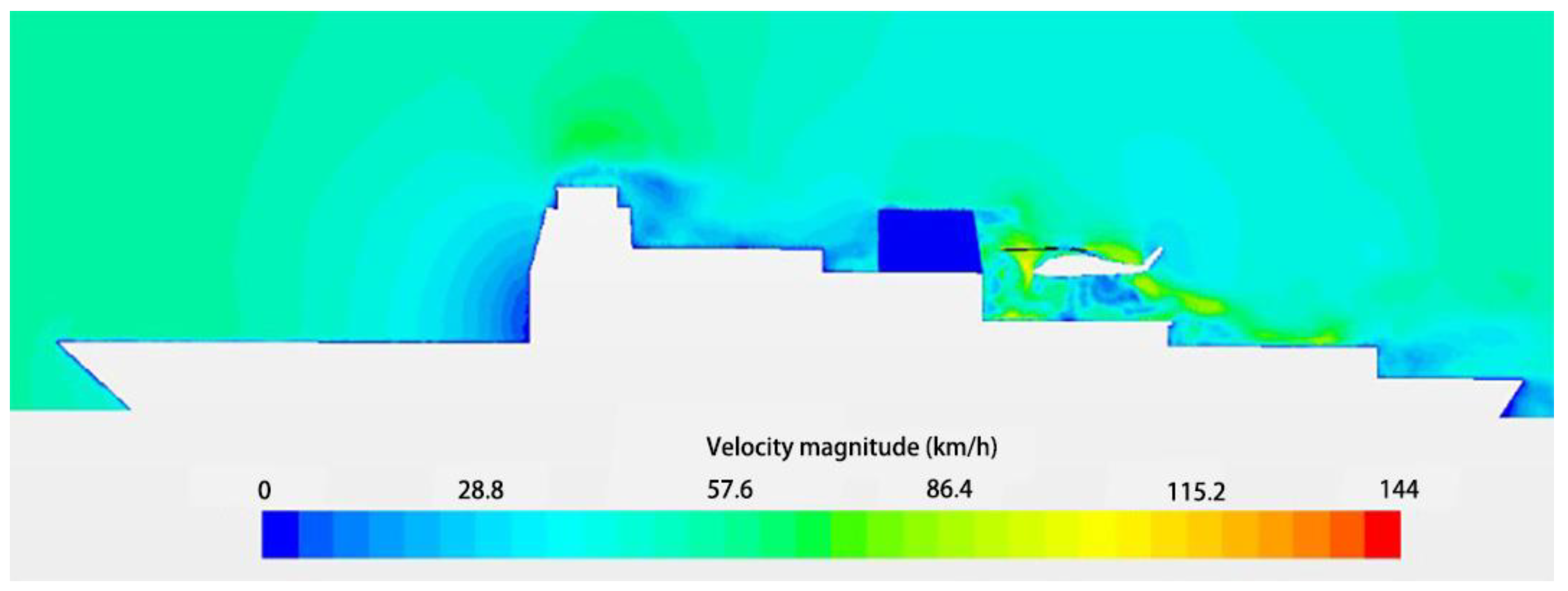
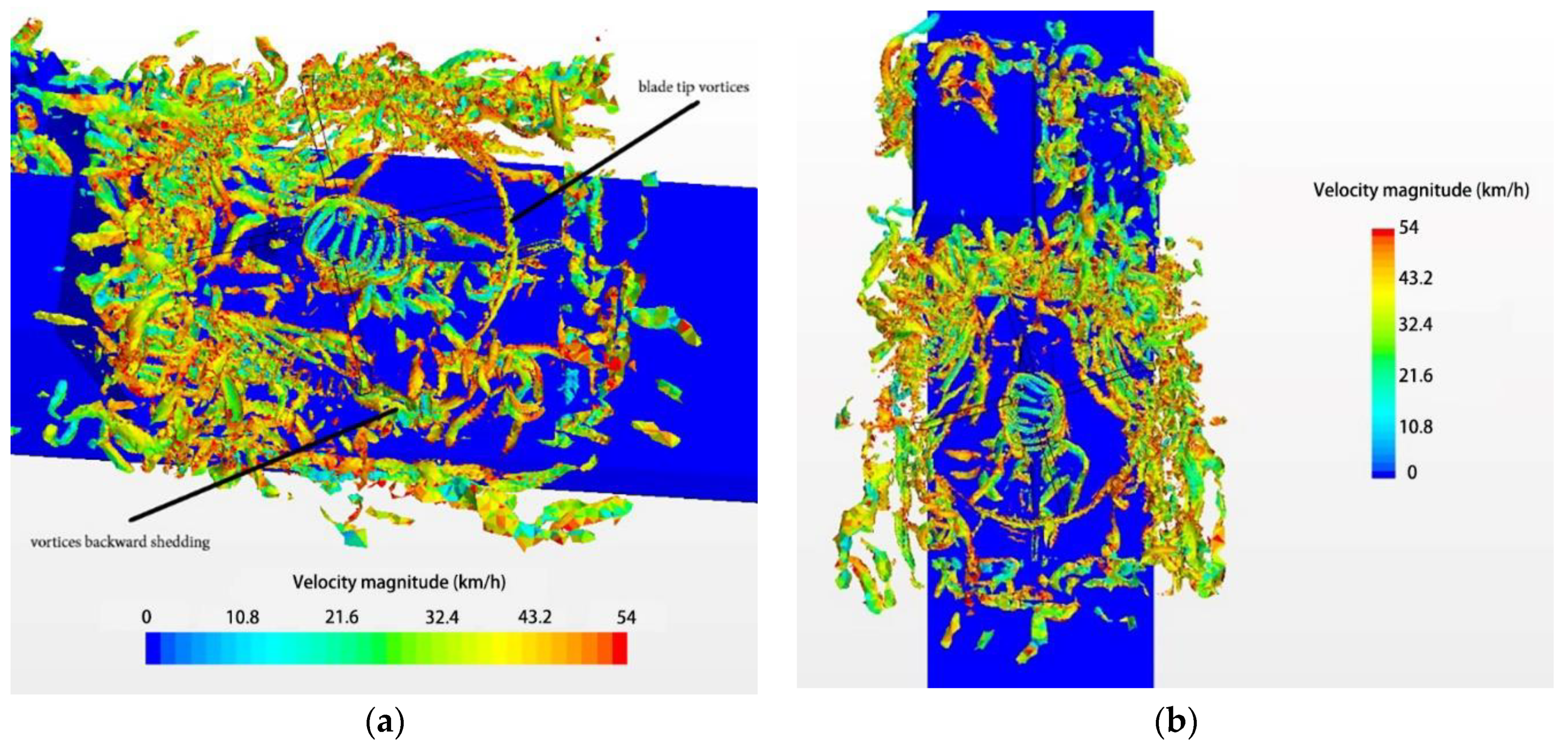
3.3. Fully Coupled Airwake Analysis
3.3.1. Coupled Airwake Topology Analysis for Combination 1
3.3.2. Coupled Airwake Topology Analysis of Combination 2
3.4. Flight mechanics analysis
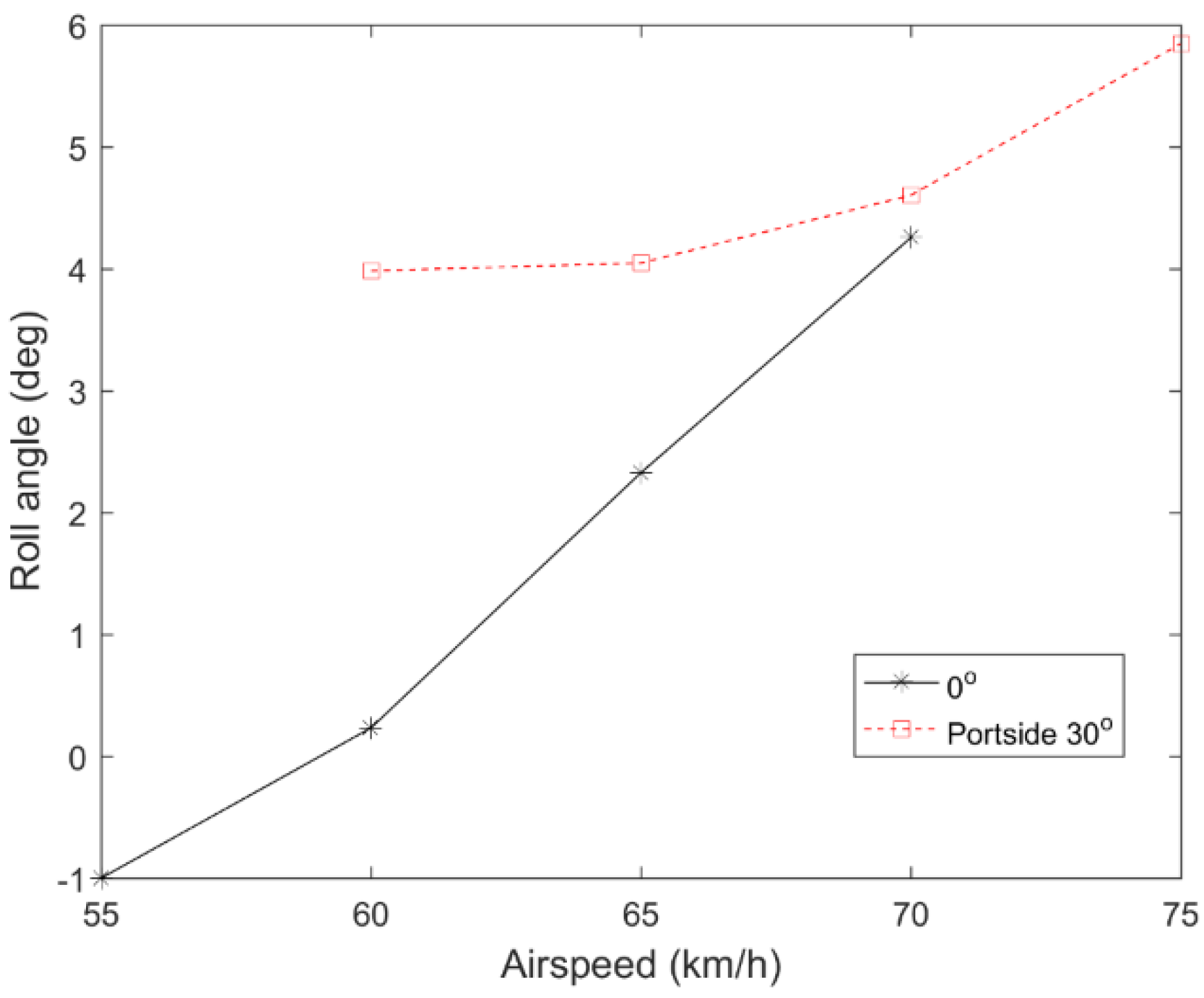
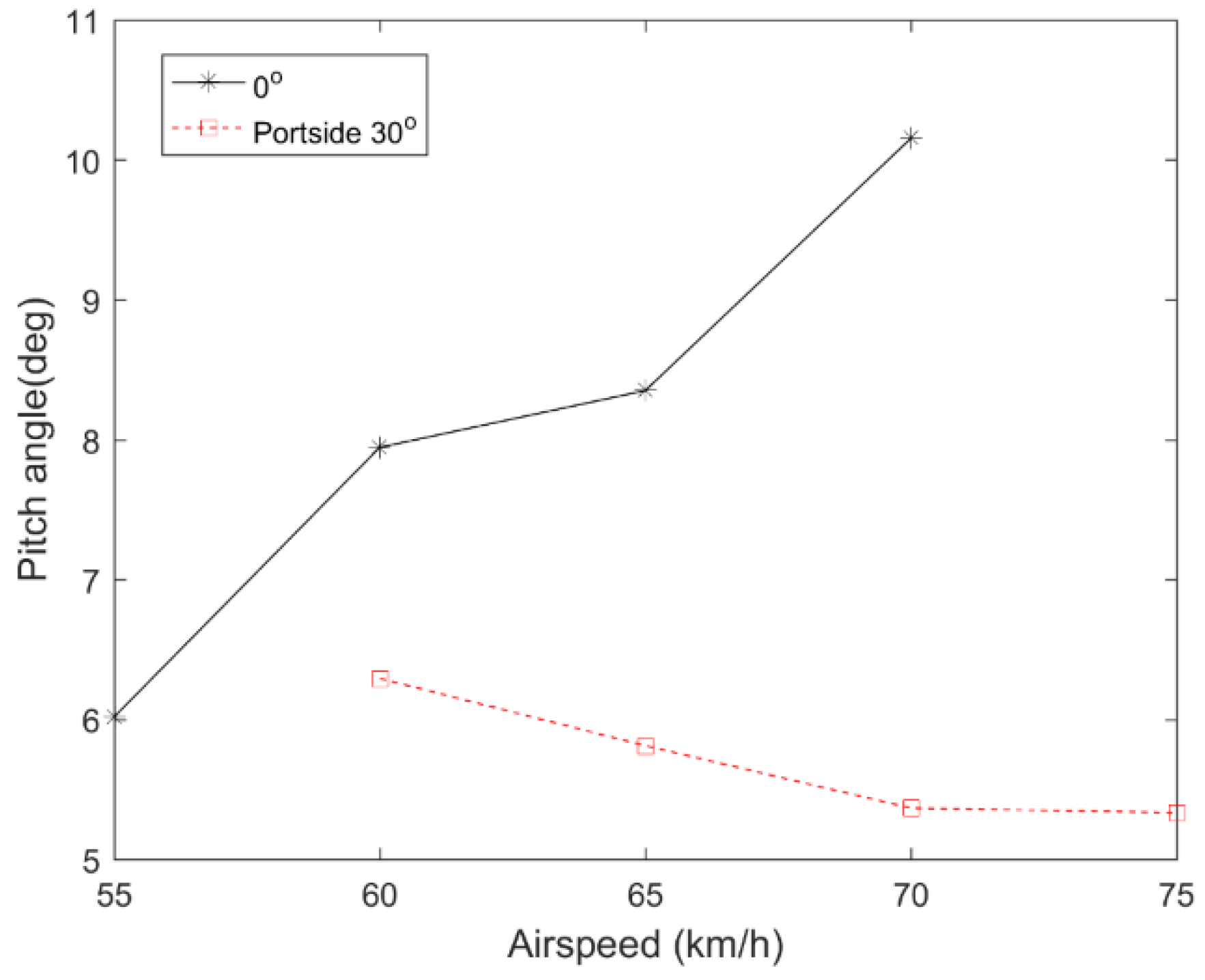
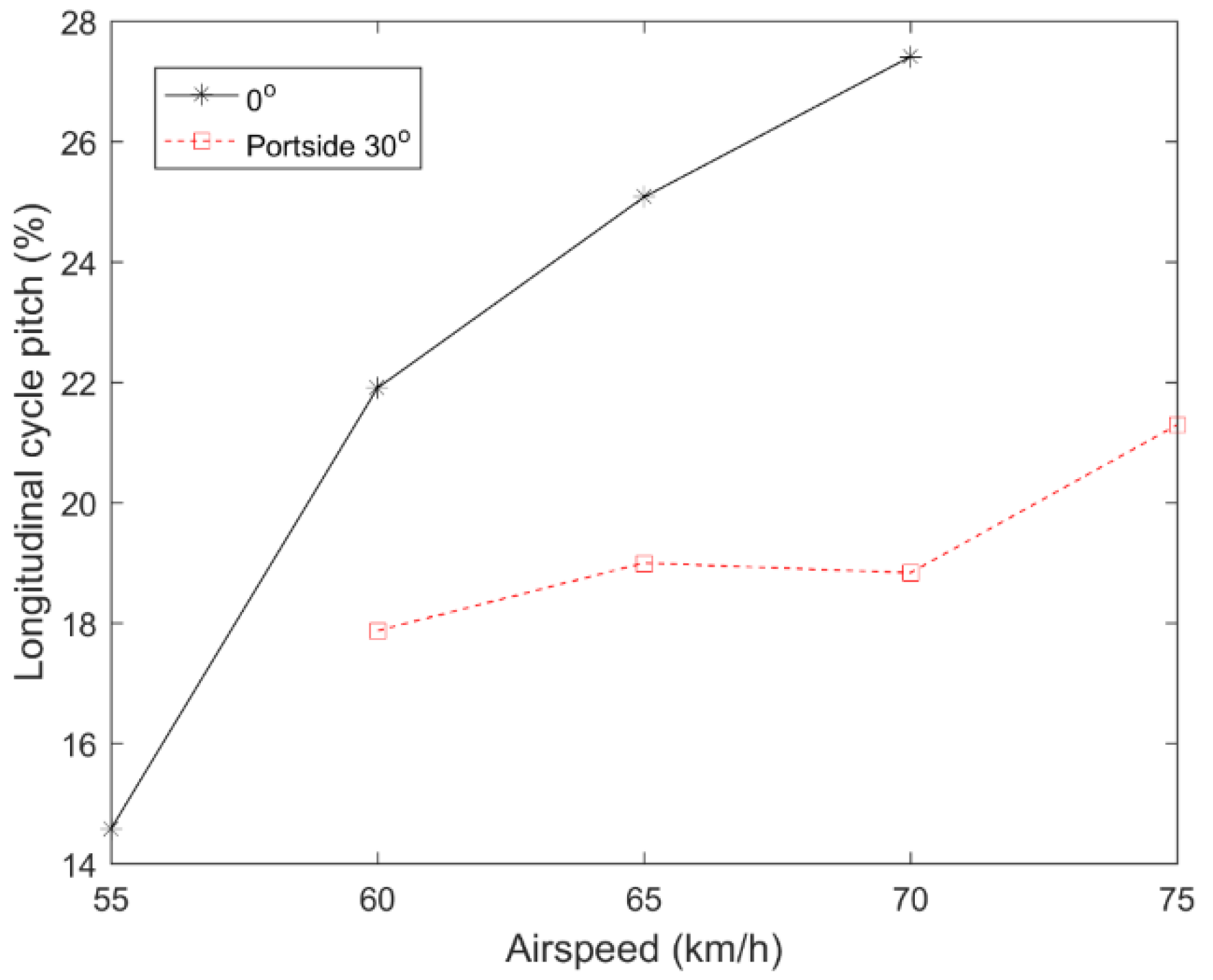
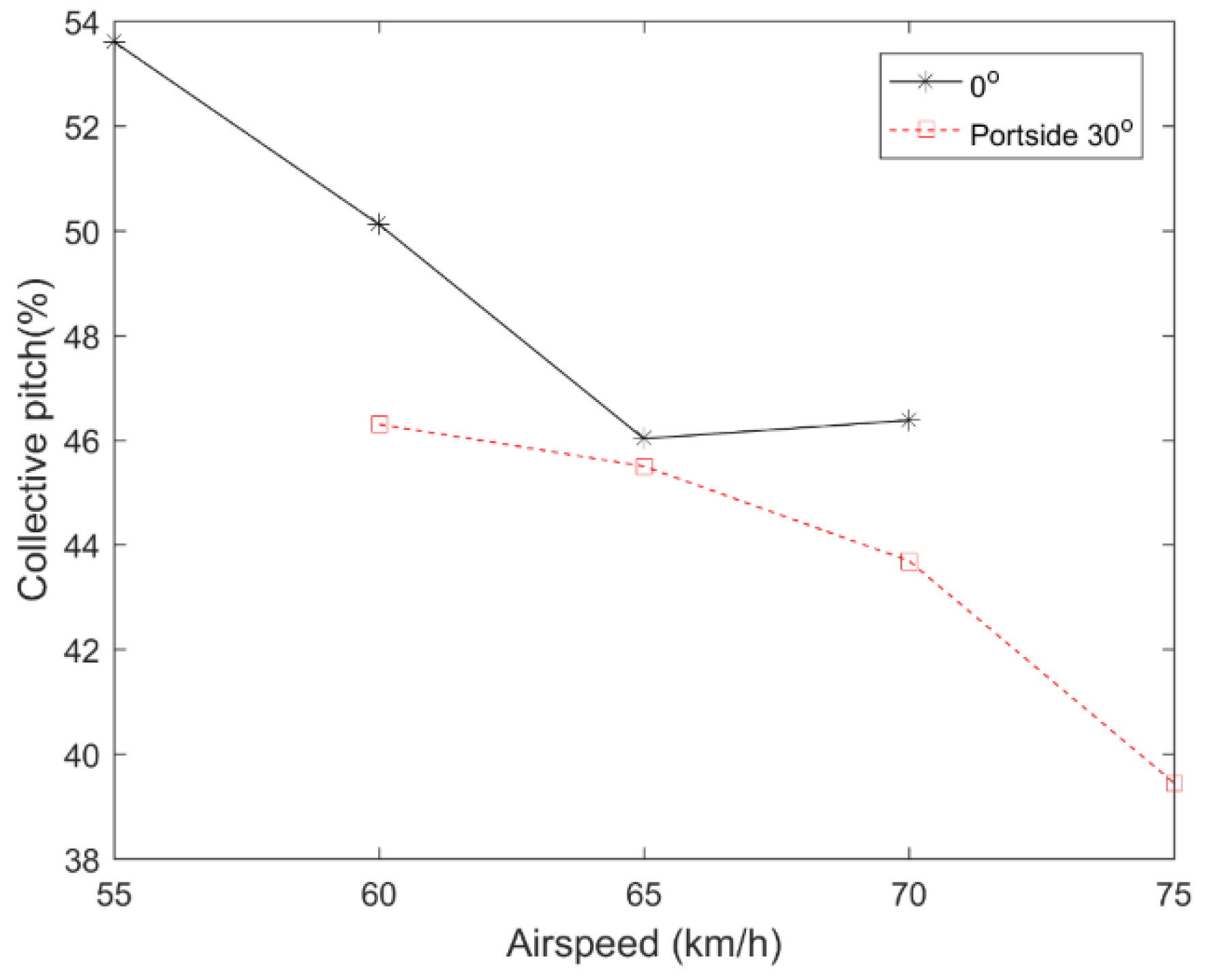
3.4.1. The Influence of Inflow Velocity on Helicopter Landing
3.4.2. The Influence of Inflow Angle on Helicopter Landing
3.5. Candidate SHOL Envelopes
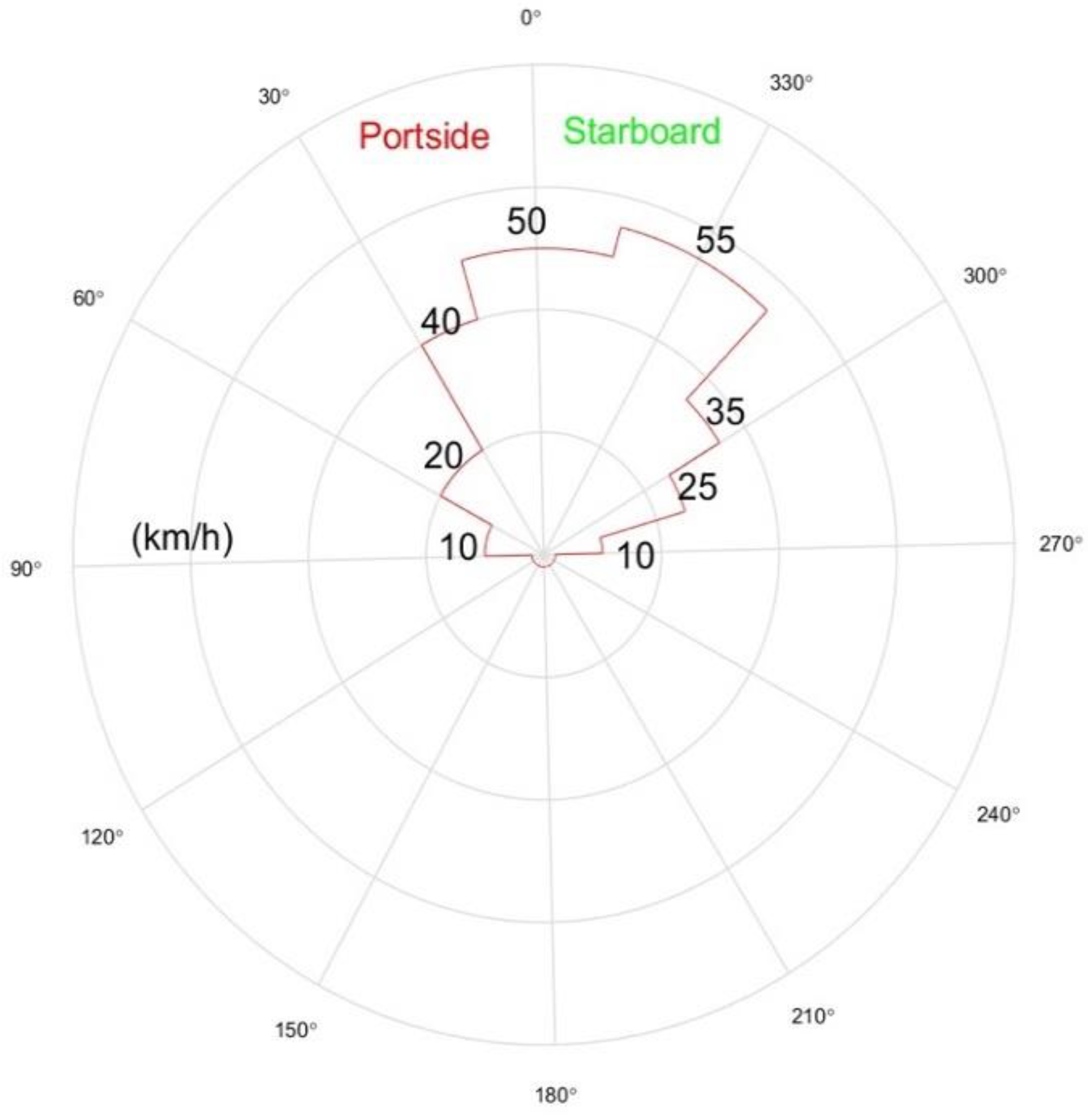
3.5.1. SHOL envelope of Combination 1
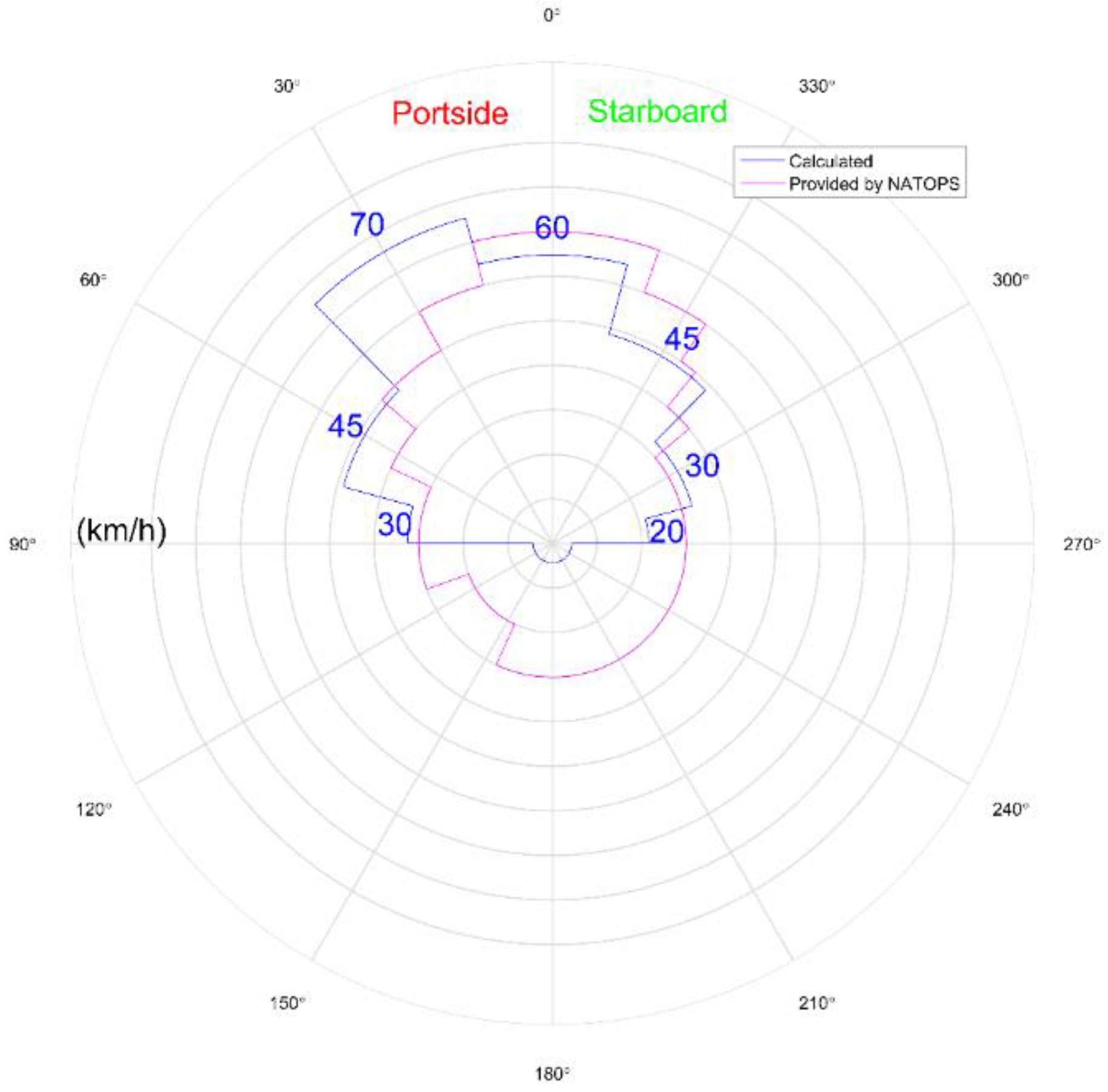
3.5.2. SHOL Envelope of Combination 2
4. Conclusions
- It is indicated that the developed coupling method and establishment method of candidate SHOL is a promise simulation tool for the analysis of the mutual ship-helicopter interactions and SHOL predictions to support at-sea flight tests;
- The results confirm that numerical simulation of shipborne helicopters using both steady AD model and resolved blade method can accurately capture the main characteristics of the fully coupled ship-helicopter flow-field;
- The flight mechanics analysis of Combination 2 shows that under the same wind angle condition, the helicopter’s trim roll angle tends to increase with the inflow wind speed. The pitch angle does not have a simple linear relationship with the inflow speed but is subject to inflow direction and ship superstructure. The longitudinal and lateral cyclic control displacements increase with the wind speed;
- The analysis of Combination 2 indicates that under the same inflow wind speed, with the increase of wind direction angle, the pitch angle decreases while the roll angle increases and deviates to the inflow wind direction. This trend is also reflected in the cyclic pitch, which decreases in longitudinal and increases in lateral;
- The roll and pitch angles are more likely to exceed the rejection criteria, and become the key indicators affecting the safe landing of shipborne helicopters;
- From the derived candidate SHOL envelopes of the two combinations, it can be found that the maximum allowable inflow wind speed varies greatly under different wind directions. The allowable wind speed is larger in the case of a small wind direction angle and the maximum wind speed occurs at 30 degrees for both ship-helicopter combinations;
- The SHOL envelopes are both asymmetrical. For Combination 1, the SHOL on the portside is generally larger than that on the starboard; while the SHOL envelope of Combination 2 shows the opposite characteristic. These differences are mainly due to the rotation direction of the main rotors.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Cao, Y.; Qin, Y. Insight into the factors affecting the safety of take-off and landing of the ship-borne helicopter. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2022, 236, 1925–1946. [Google Scholar] [CrossRef]
- Cao, Y.; Qin, Y. Modeling and Simulation of Ship–Helicopter Dynamic Interface: Method and Application. Arch. Comput. Methods Eng. 2022, 1–41. [Google Scholar] [CrossRef]
- Forrest, J.S.; Hodge, S.J.; Owen, I.; Padfield, G.D. An investigation of ship airwake phenomena using time-accurate CFD and piloted helicopter flight simulation. In Proceedings of the 34th European rotorcraft forum, Liverpool, UK, 16–19 September 2008. [Google Scholar]
- Lee, D.; Sezer-Uzol, N.; Horn, J.F.; Long, L.N. Simulation of Helicopter Shipboard Launch and Recovery with Time-Accurate Airwakes. J. Aircr. 2005, 42, 448–461. [Google Scholar] [CrossRef]
- Oruc, I.; Horn, J.F.; Polsky, S.; Shipman, J.; Erwin, J. Coupled flight dynamics and CFD simulations of the helicopter/ship dynamic interface. In Proceedings of the 71st American Helicopter Society annual forum, Virginia, VA, USA, 5–7 May 2015. [Google Scholar]
- Kääriä, C.H.; Forrest, J.S.; Owen, I. The virtual AirDyn: A simulation technique for evaluating the aerodynamic impact of ship superstructures on helicopter operations. Aeronaut. J. 2013, 117, 1233–1248. [Google Scholar] [CrossRef]
- Forrest, J.; Kaaria, C.; Owen, I. Evaluating ship superstructure aerodynamics for maritime helicopter operations through CFD and flight simulation. Aeronaut. J. 2016, 120, 1578–1603. [Google Scholar] [CrossRef]
- Memon, W.A.; Owen, I.; White, M.D. SIMSHOL: A Predictive Simulation Approach to Inform Helicopter–Ship Clearance Trials. J. Aircr. 2020, 57, 854–875. [Google Scholar] [CrossRef]
- Zan, S.J. On Aerodynamic Modelling and Simulation of the Dynamic Interface. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2005, 219, 393–410. [Google Scholar] [CrossRef]
- Bridges, D.; Horn, J.; Alpman, E.; Long, L. Coupled Flight Dynamics and CFD Analysis of Pilot Workload in Ship Airwakes. In Proceedings of the AIAA Atmospheric Flight Mechanics Conference and Exhibit, Hilton Head, SC, USA, 20–23 August 2007. [Google Scholar] [CrossRef] [Green Version]
- Wakefield, N.H.; Newman, S.J.; Wilson, P. Helicopter flight around a ship‘s’ superstructure. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2002, 216, 13–28. [Google Scholar] [CrossRef]
- Alpman, E.; Long, L.N.; Bridges, D.O.; Horn, J.F. Fully-Coupled Simulations of the Rotorcraft/Ship Dynamic Interface. In Proceedings of the American Helicopter Society 63rd Annual Forum, Virginia Beach, VA, USA, 1–3 May 2007. [Google Scholar]
- Le Chuiton, F. Actuator disc modelling for helicopter rotors. Aerosp. Sci. Technol. 2004, 8, 285–297. [Google Scholar] [CrossRef]
- Tang, L.; Dinu, A.; Polsky, S. Reduced-Order Modeling of Rotor-Ship Interaction. In Proceedings of the 50th AIAA Aerospace Sciences Meeting, Nashville, TN, USA, 9–12 January 2012. [Google Scholar] [CrossRef]
- Rajmohan, N.; Zhao, J.; He, C.; Polsky, S. Development of a Reduced Order Model to Study Rotor/Ship Aerodynamic Interaction. In Proceedings of the AIAA SciTech Forum, Kissimmee, FL, USA, 5–9 January 2015. [Google Scholar] [CrossRef]
- Lu, Y.; Chang, X.; Chuang, Z.; Xing, J.; Zhou, Z.; Zhang, X. Numerical investigation of the unsteady coupling airflow impact of a full-scale warship with a helicopter during shipboard landing. Eng. Appl. Comput. Fluid Mech. 2020, 14, 954–979. [Google Scholar] [CrossRef]
- Crozon, C.; Steijl, R.; Barakos, G. Numerical Study of Helicopter Rotors in a Ship Airwake. J. Aircr. 2014, 51, 1813–1832. [Google Scholar] [CrossRef]
- Oruc, I.; Horn, J.F.; Shipman, J. Coupled Flight Dynamics and Computational Fluid Dynamics Simulations of Rotorcraft/Terrain Interactions. J. Aircr. 2017, 54, 2228–2241. [Google Scholar] [CrossRef]
- Lee, Y.; Silva, M. CFD-Modeling of Rotor Flowfield Aboard Ship. In Proceedings of the 48th AIAA Aerospace Sciences Meeting, Orlando, FL, USA, 4–7 January 2010. [Google Scholar] [CrossRef]
- Lawson, S.; Woodgate, M.; Steijl, R.; Barakos, G. High performance computing for challenging problems in computational fluid dynamics. Prog. Aerosp. Sci. 2012, 52, 19–29. [Google Scholar] [CrossRef]
- Crozon, C.; Steijl, R.; Barakos, G. Coupled flight dynamics and CFD—demonstration for helicopters in shipborne environment. Aeronaut. J. 2018, 122, 42–82. [Google Scholar] [CrossRef] [Green Version]
- Dooley, G.; Martin, J.E.; Buchholz, J.H.; Carrica, P.M. Ship Airwakes in Waves and Motions and Effects on Helicopter Operation. Comput. Fluids 2020, 208, 104627. [Google Scholar] [CrossRef]
- Yakhot, V.; Orszag, S.A.; Thangam, S.; Gatski, T.B.; Speziale, C.G. Development of turbulence models for shear flows by a double expansion technique. Phys. Fluids 1992, 4, 1510–1520. [Google Scholar] [CrossRef]
- Syms, G. Numerical Simulation of Frigate Airwakes. Int. J. Comput. Fluid Dyn. 2004, 18, 199–207. [Google Scholar] [CrossRef]
- Kulkarni, P.; Singh, S.; Seshadri, V. Parametric studies of exhaust smoke–superstructure interaction on a naval ship using CFD. Comput. Fluids 2007, 36, 794–816. [Google Scholar] [CrossRef]
- Reddy, K.; Toffoletto, R.; Jones, K. Numerical simulation of ship airwake. Comput. Fluids 2000, 29, 451–465. [Google Scholar] [CrossRef]
- Roper, D.M.; Owen, I.; Padfield, G.D.; Hodge, S.J. Integrating CFD and piloted simulation to quantify ship-helicopter operating limits. Aeronaut. J. 2006, 110, 419–428. [Google Scholar] [CrossRef]
- Talbot, P.D.; Tinling, B.E.; Decker, W.A.; Chen, R.T. A Mathematical Model of a Single Main Rotor Helicopter for Piloted Simulation; NASA-TM-84281; National Aeronautics and Space Administration: Washington, DC, USA, 1 September 1982.
- Cao, Y.; Cao, L.; Wan, S. Trim Calculation of the CH-53 Helicopter Using Numerical Continuation Method. J. Guid. Control Dyn. 2014, 37, 1343–1349. [Google Scholar] [CrossRef]
- Hoencamp, A.; Pavel, M.D. Concept of a Predictive Tool for Ship–Helicopter Operational Limitations of Various In-Service Conditions. J. Am. Helicopter Soc. 2012, 57, 032008. [Google Scholar] [CrossRef]
- Roper, D.M.; Owen, I.; Padfield, G.D. CFD investigation of the helicopter-ship dynamic interface. In Proceedings of the 61st American Helicopter Society International Annual Forum, Grapevine, TX, USA, 1–3 June 2005. [Google Scholar]
- Forrest, J.S.; Owen, I. An investigation of ship airwakes using Detached-Eddy Simulation. Comput. Fluids 2010, 39, 656–673. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| LPD17 Ship | SA365 Helicopter | ||
|---|---|---|---|
| Length | 208.5 m | Overall Length | 13.46 m |
| Beam | 31.9 m | Mass | 3850 kg |
| Speed | 22+ knots | Main Rotor (MR) Radius | 5.97 m |
| Maximum Navigational Draft | 7 m | MR Rotational Speed | 36.55 rad/s |
| Number of MR Blades | 4 | ||
| Tail Rotor (TR) Radius | 0.45 m | ||
| Number of TR Blades | 13 | ||
| TR Rotational Speed | 492.80 rad/s | ||
| CG47 Ship | UH60 Helicopter | ||
|---|---|---|---|
| Overall Length | 172.82 m | Overall Length | 19.76 m |
| Waterline Beam | 16.76 m | Mass | 7438.91 kg |
| Speed | 30+ knots | MR Radius | 8.18 m |
| Maximum Navigational Draft | 10.2 m | MR Rotational Speed | 27 rad/s |
| Number of MR Blades | 4 | ||
| TR Radius | 1.68 m | ||
| TR Rotational Speed | 124.62 rad/s | ||
| Grid | Cells (Million) |
|---|---|
| Rotor blade ∗4 | 1.59 ∗4 |
| Helicopter fuselage | 4.01 |
| Background (including ship) | 3.80 |
| Total | 14.2 |
| Variables | Rejection Criteria |
|---|---|
| Roll angle | >|5°| |
| Pitch angle | >|8°| |
| Longitudinal cyclic pitch | >85% |
| Lateral cyclic pitch | >85% |
| Collective displacement | >85% |
| Pedal displacement | >80% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cao, Y.; Qin, Y.; Tan, W.; Li, G. Numerical Simulation of Fully Coupled Flow-Field and Operational Limitation Envelopes of Helicopter-Ship Combinations. J. Mar. Sci. Eng. 2022, 10, 1455. https://doi.org/10.3390/jmse10101455
Cao Y, Qin Y, Tan W, Li G. Numerical Simulation of Fully Coupled Flow-Field and Operational Limitation Envelopes of Helicopter-Ship Combinations. Journal of Marine Science and Engineering. 2022; 10(10):1455. https://doi.org/10.3390/jmse10101455
Chicago/Turabian StyleCao, Yihua, Yihao Qin, Wenyuan Tan, and Guozhi Li. 2022. "Numerical Simulation of Fully Coupled Flow-Field and Operational Limitation Envelopes of Helicopter-Ship Combinations" Journal of Marine Science and Engineering 10, no. 10: 1455. https://doi.org/10.3390/jmse10101455
APA StyleCao, Y., Qin, Y., Tan, W., & Li, G. (2022). Numerical Simulation of Fully Coupled Flow-Field and Operational Limitation Envelopes of Helicopter-Ship Combinations. Journal of Marine Science and Engineering, 10(10), 1455. https://doi.org/10.3390/jmse10101455