
Self-Powered and Robust Marine Exhaust Gas Flow Sensor Based on Bearing Type Triboelectric Nanogenerator

 , , , and
, , , and {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Results and Discussion
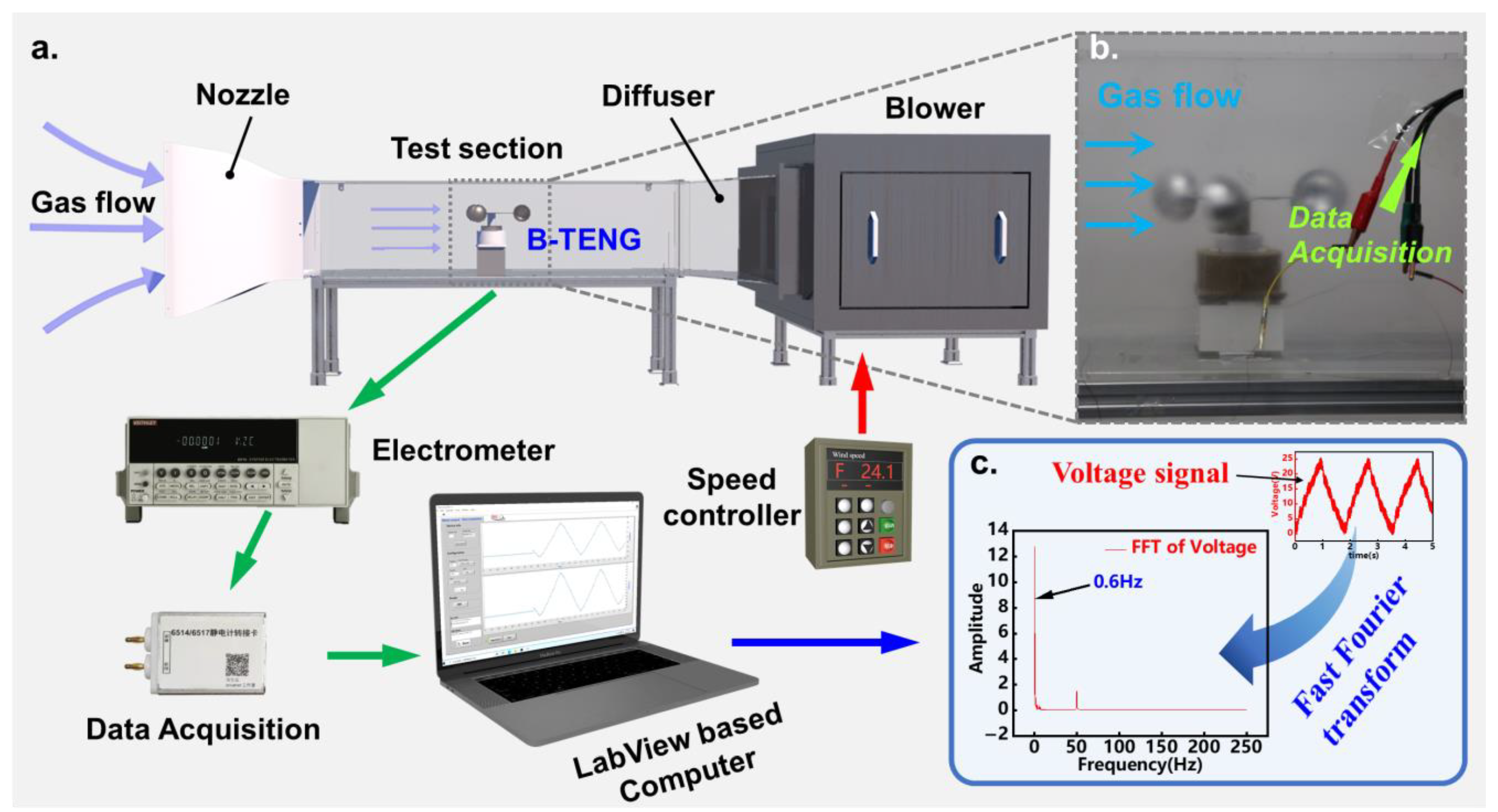
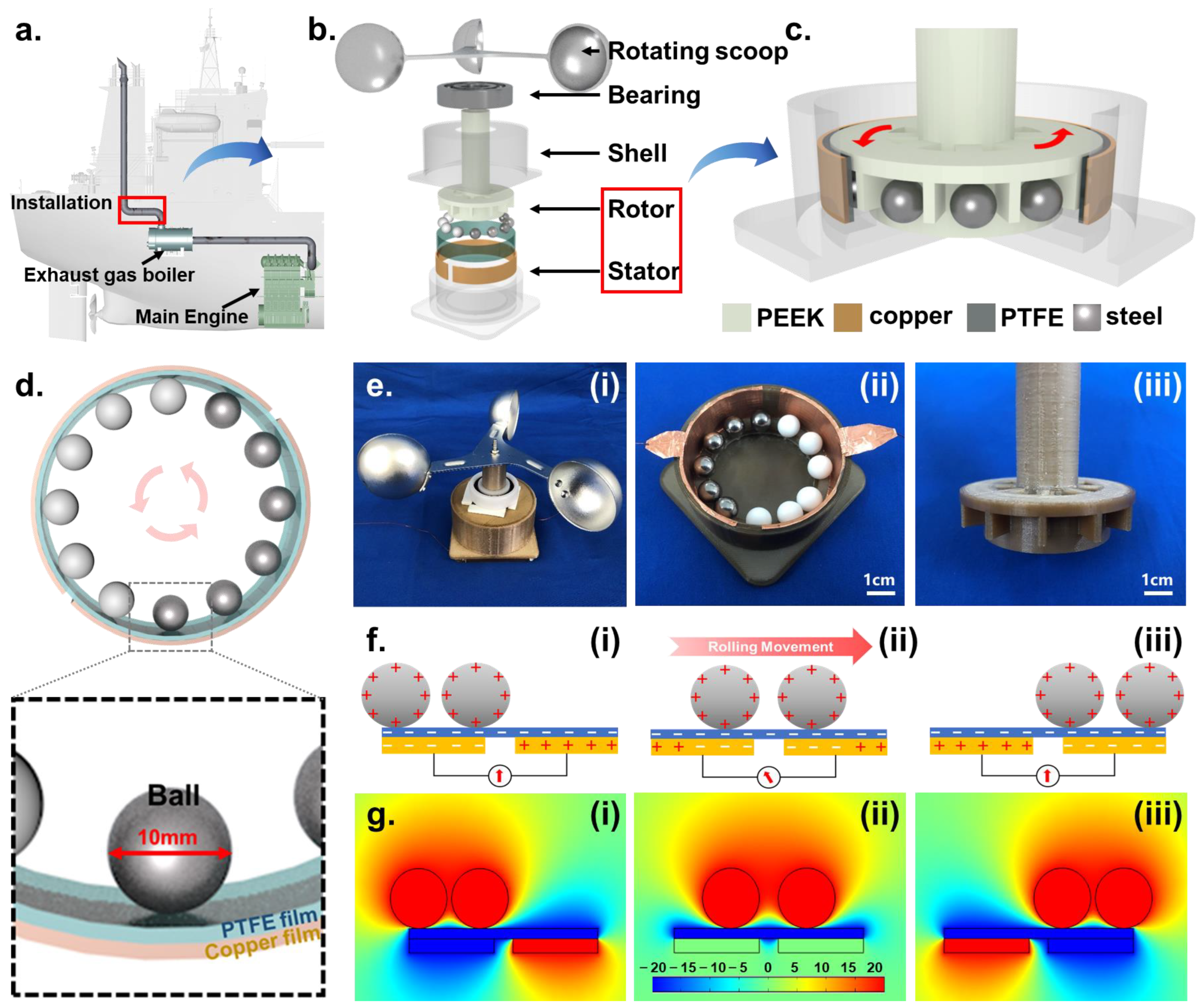
2.1. Structure and Working Principle of the B-TENG
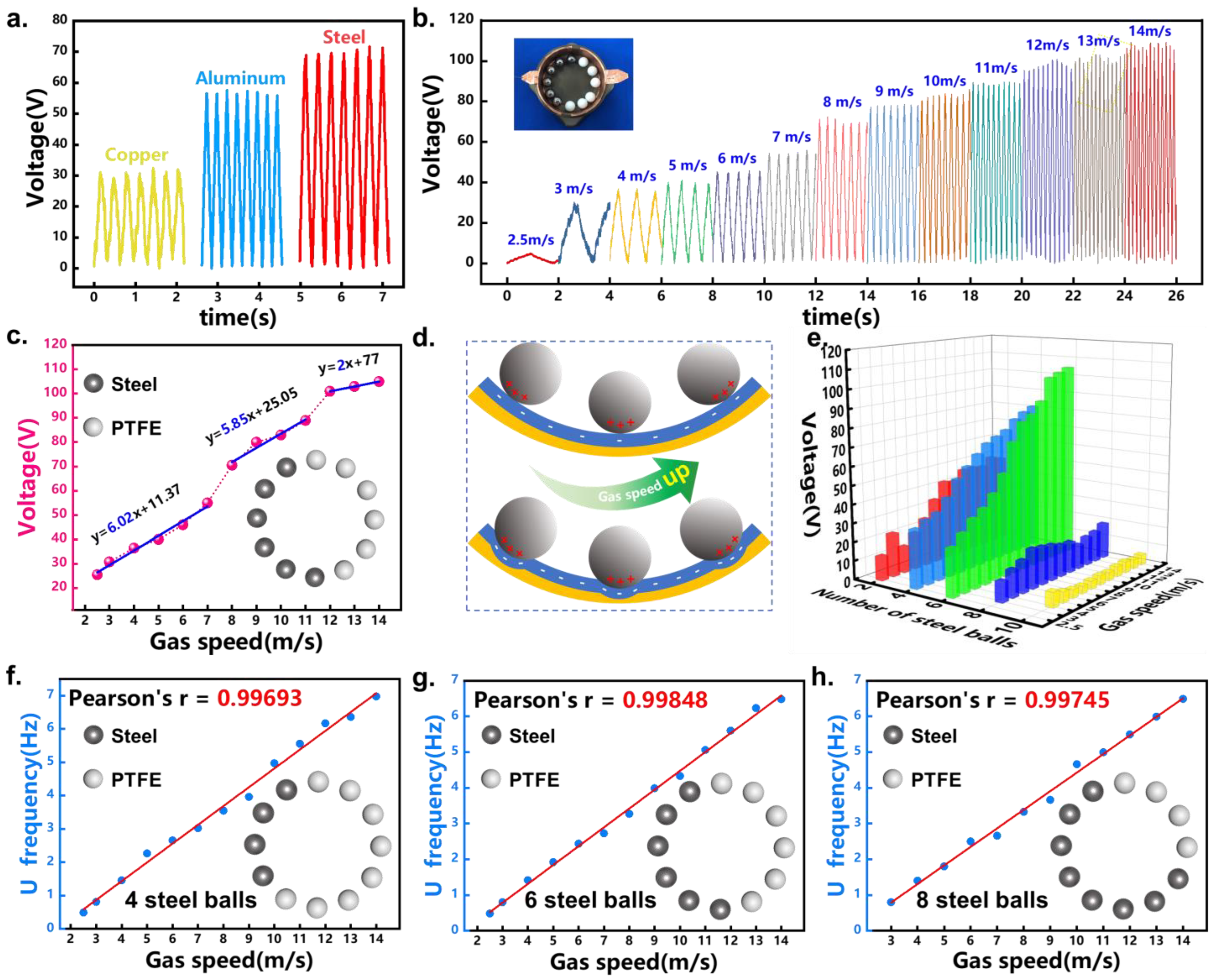
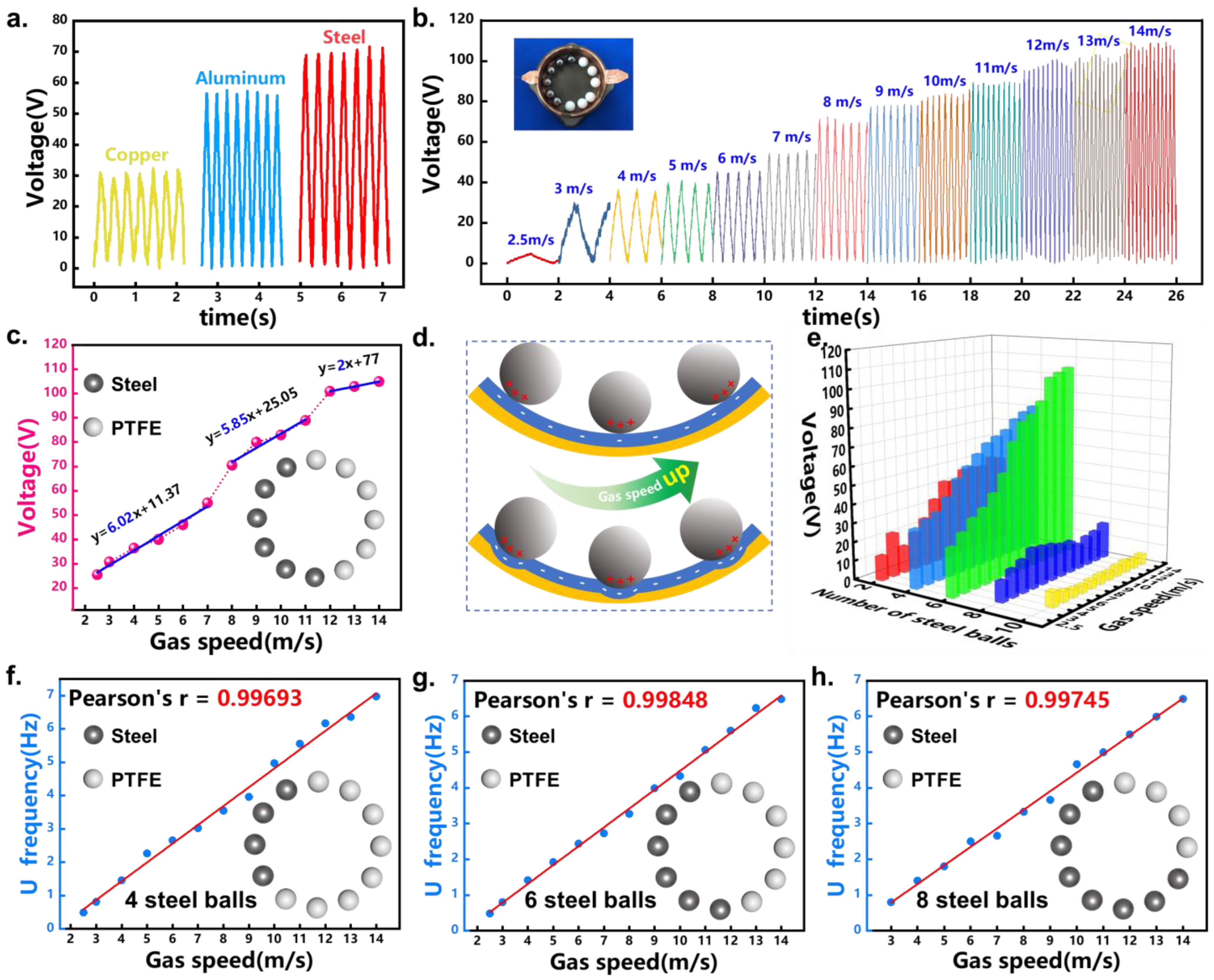
2.2. Effect of Ball Conditions on the Performance of B-TENG
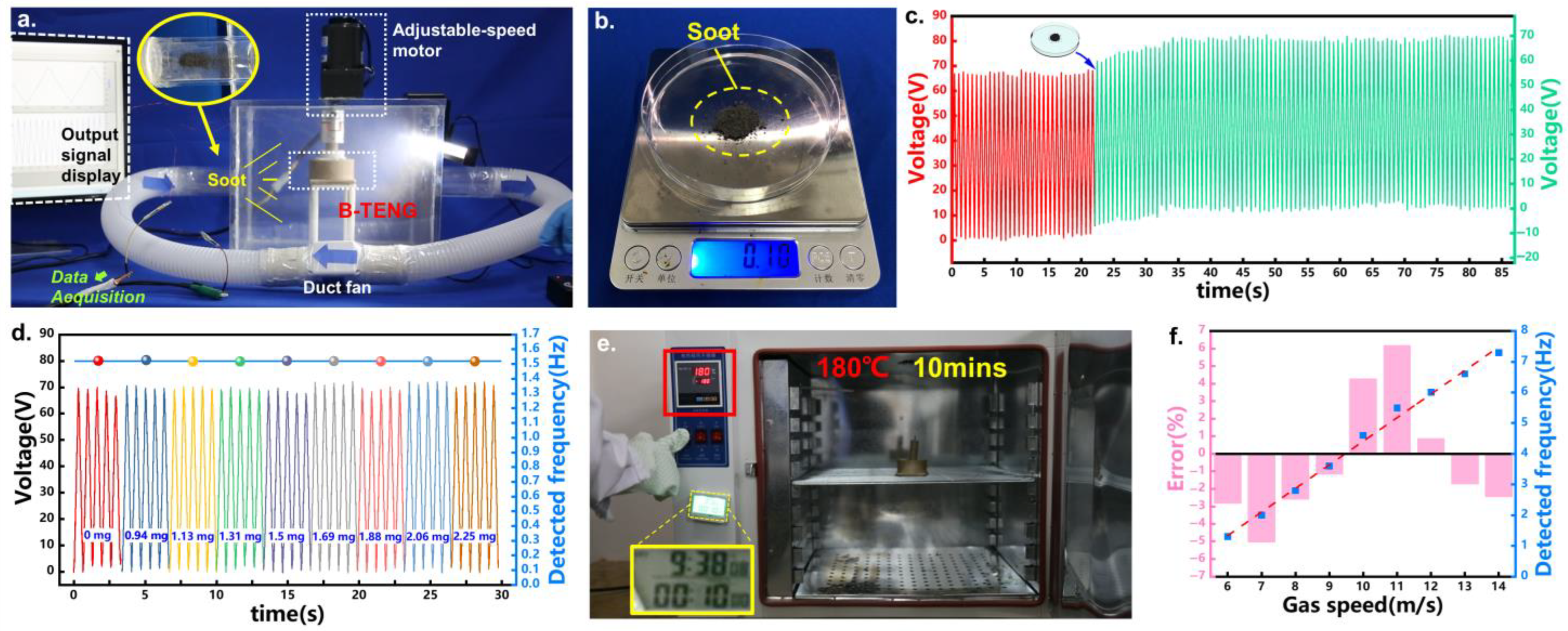
2.3. Effect of Gas Property on the Performance of B-TENG
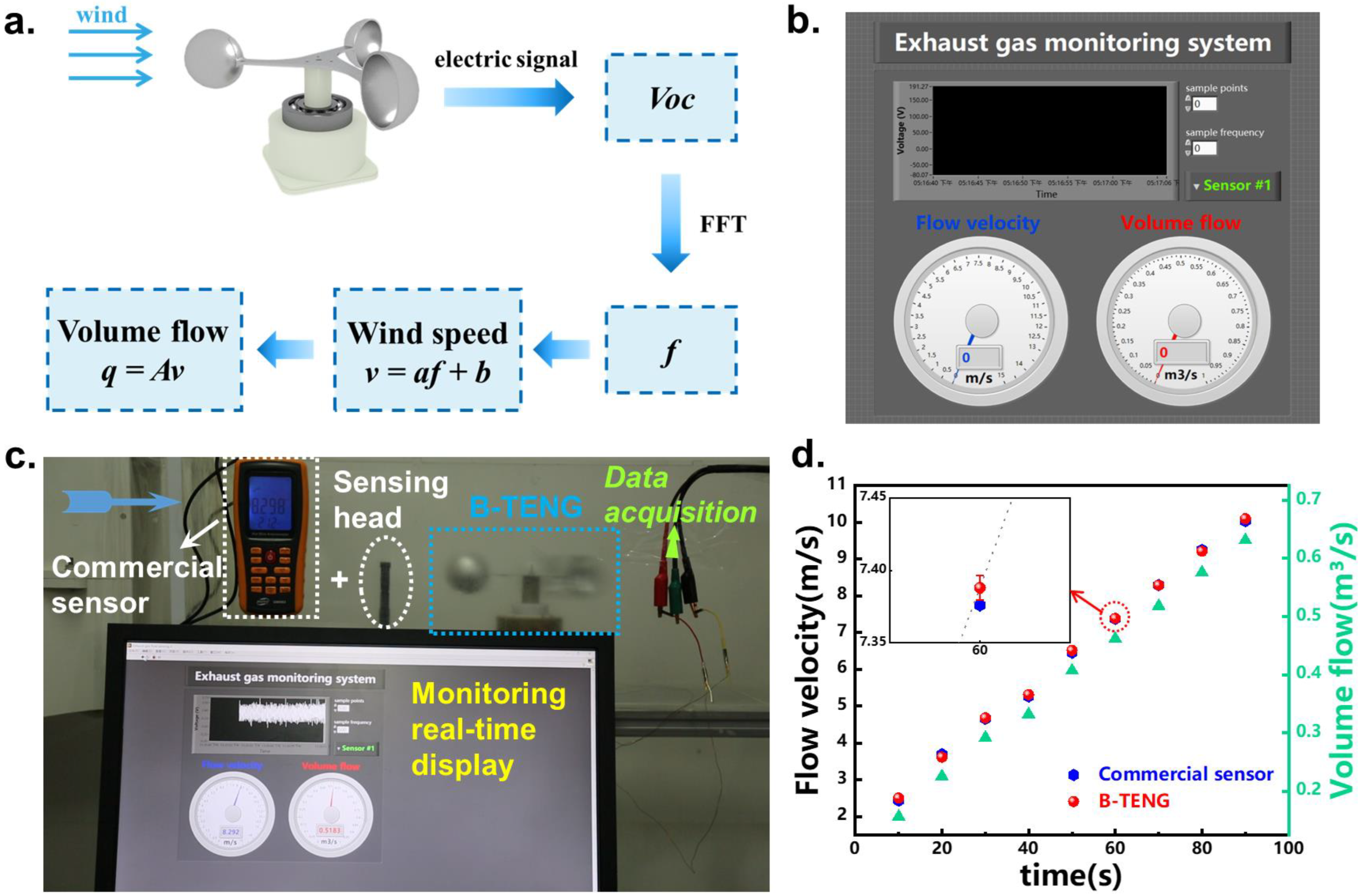
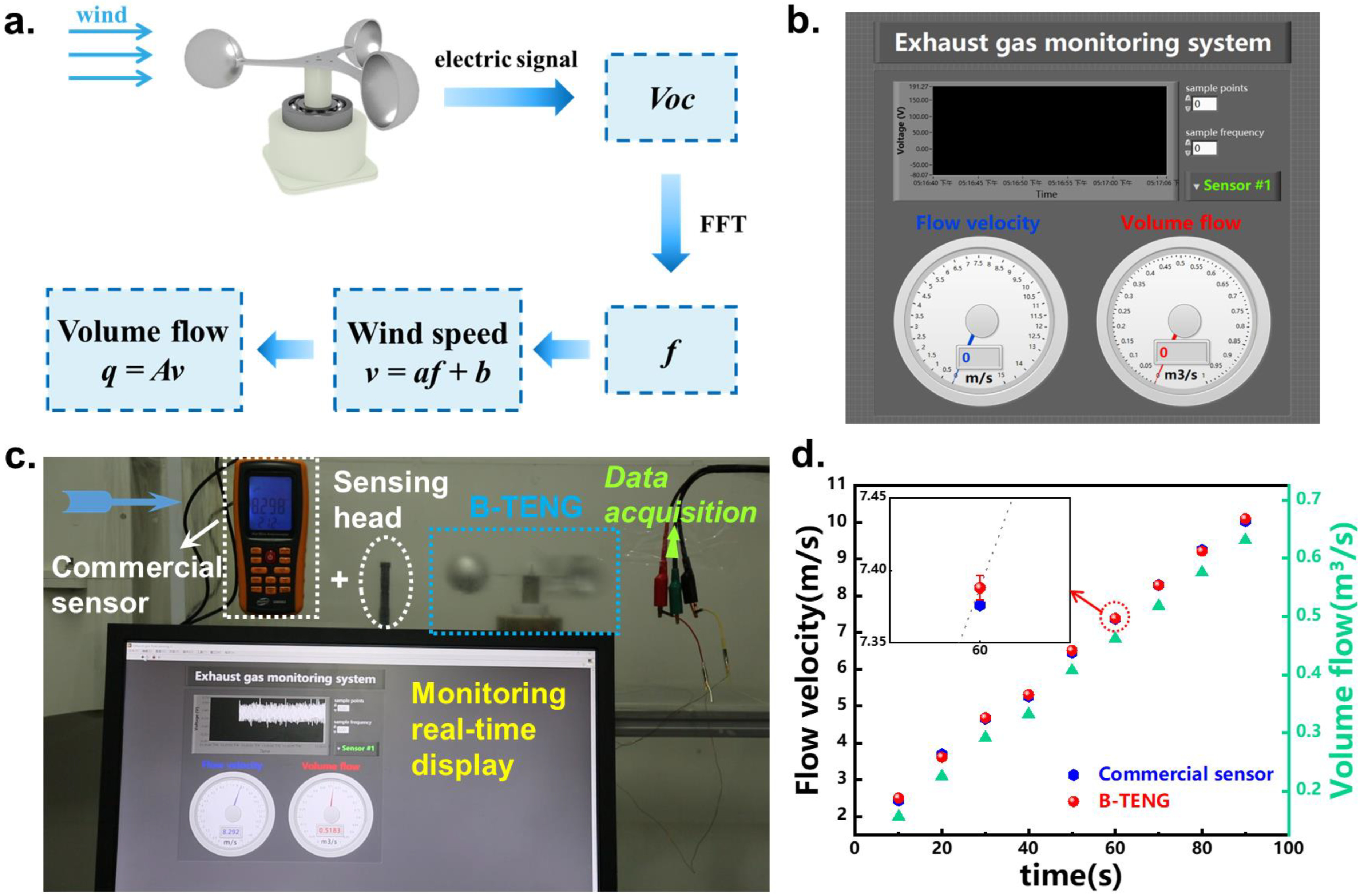
2.4. Demonstration of the B-TENG
3. Conclusions
4. Experiment Section
4.1. Fabrication of the B-TENG
4.2. Measurement of the B-TENG Performance
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Wan, Z.; Zhu, M.; Chen, S.; Sperling, D. Three steps to a green shipping industry. Nature 2016, 530, 275–277. [Google Scholar] [CrossRef] [Green Version]
- Ni, P.Y.; Wang, X.L.; Li, H. A review on regulations, current status, effects and reduction strategies of emissions for marine diesel engines. Fuel 2020, 279, 16. [Google Scholar] [CrossRef]
- Bijlsma, S.J. Minimal Time Route Computation for Ships with Pre-Specified Voyage Fuel Consumption. J. Navig. 2008, 61, 723–733. [Google Scholar] [CrossRef]
- China Classification Society. Guidelines for Testing and Survey of Emission of Nitrogen Oxides from Marine Diesel Engines; China Classification Society: Beijing, China, 2020. [Google Scholar]
- Fan, Z.C.; Jiang, W.T.; Wright, W.M.D. Non-contact ultrasonic gas flow metering using air-coupled leaky Lamb waves. Ultrasonics 2018, 89, 74–83. [Google Scholar] [CrossRef]
- Sun, H.J.; Yang, T.Y.; Ding, H.B.; Li, J.X.; Zhang, W.Q. Online Measurement of Gas and Liquid Flow Rates in Wet Gas Using Vortex Flowmeter Coupled With Conductance Ring Sensor. IEEE Trans. Instrum. Meas. 2022, 71, 14. [Google Scholar] [CrossRef]
- Dzemic, Z.; Sirok, B.; Bizjan, B. Turbine flowmeter response to transitional flow regimes. Flow Meas. Instrum. 2018, 59, 18–22. [Google Scholar] [CrossRef]
- Gonzalez, N.F.; Kindelan, J.C.; Martinez, J.M.L. Methodology for instantaneous average exhaust gas mass flow rate measurement. Flow Meas. Instrum. 2016, 49, 52–62. [Google Scholar] [CrossRef] [Green Version]
- Ma, S.; Jiang, M.D.; Tao, P.; Song, C.Y.; Wu, J.B.; Wang, J.; Deng, T.; Shang, W. Temperature effect and thermal impact in lithium-ion batteries: A review. Prog. Nat. Sci. 2018, 28, 653–666. [Google Scholar] [CrossRef]
- Fan, F.R.; Tian, Z.Q.; Wang, Z.L. Flexible triboelectric generator! Nano Energy 2012, 1, 328–334. [Google Scholar] [CrossRef]
- Niu, S.M.; Liu, Y.; Wang, S.H.; Lin, L.; Zhou, Y.S.; Hu, Y.F.; Wang, Z.L. Theory of Sliding-Mode Triboelectric Nanogenerators. Adv. Mater. 2013, 25, 6184–6193. [Google Scholar] [CrossRef] [PubMed]
- Chen, B.D.; Wang, Z.L. Toward a New Era of Sustainable Energy: Advanced Triboelectric Nanogenerator for Harvesting High Entropy Energy. Small 2022, 16, 2107034. [Google Scholar] [CrossRef] [PubMed]
- Song, Y.; Wang, N.; Wang, Y.; Zhang, R.; Olin, H.; Yang, Y. Direct Current Triboelectric Nanogenerators. Adv. Energy Mater. 2020, 10, 2002756. [Google Scholar] [CrossRef]
- Mariappan, V.K.; Krishnamoorthy, K.; Pazhamalai, P.; Manoharan, S.; Kim, S.-J. Decoupling Contact and Rotary Triboelectrification vs Materials Property: Toward Understanding the Origin of Direct-Current Generation in TENG. ACS Appl. Mater. Interfaces 2022, 14, 34593–34602. [Google Scholar] [CrossRef]
- Park, S.J.; Lee, S.; Seol, M.L.; Jeon, S.B.; Bae, H.; Kim, D.; Cho, G.H.; Choi, Y.K. Self-sustainable wind speed sensor system with omni-directional wind based triboelectric generator. Nano Energy 2019, 55, 115–122. [Google Scholar] [CrossRef]
- Ko, H.J.; Kwon, D.S.; Bae, K.; Kim, J. Self-suspended shell-based triboelectric nanogenerator for omnidirectional wind-energy harvesting. Nano Energy 2022, 96, 10. [Google Scholar] [CrossRef]
- Olsen, M.; Zhang, R.Y.; Ortegren, J.; Andersson, H.; Yang, Y.; Olin, H. Frequency and voltage response of a wind-driven fluttering triboelectric nanogenerator. Sci. Rep. 2019, 9, 6. [Google Scholar] [CrossRef] [Green Version]
- Wang, J.Q.; Liu, P.C.; Meng, C.L.; Kwok, H.S.; Zi, Y.L. Tribo-Induced Smart Reflector for Ultrasensitive Self-Powered Wireless Sensing of Air Flow. ACS Appl. Mater. Interfaces 2021, 13, 21450–21458. [Google Scholar] [CrossRef] [PubMed]
- Wang, Z.L.; Chen, J.; Lin, L. Progress in triboelectric nanogenerators as a new energy technology and self-powered sensors. Energy Environ. Sci. 2015, 8, 2250–2282. [Google Scholar] [CrossRef]
- Du, T.L.; Zuo, X.S.; Dong, F.Y.; Li, S.Q.; Mtui, A.E.; Zou, Y.J.; Zhang, P.; Zhao, J.H.; Zhang, Y.W.; Sun, P.T.; et al. A Self-Powered and Highly Accurate Vibration Sensor Based on Bouncing-Ball Triboelectric Nanogenerator for Intelligent Ship Machinery Monitoring. Micromachines 2021, 12, 218. [Google Scholar] [CrossRef] [PubMed]
- Prutvi, S.H.; Korrapati, M.; Gupta, D. Self-powering vibration sensor based on a cantilever system with a single-electrode mode triboelectric nanogenerator. Meas. Sci. Technol. 2022, 33, 13. [Google Scholar]
- Wang, X.Y.; Liu, J.H.; Wang, S.Y.; Zheng, J.X.; Guan, T.Z.; Liu, X.Y.; Wang, T.Y.; Chen, T.Y.; Wang, H.; Xie, G.M.; et al. A Self-powered Triboelectric Coral-Like Sensor Integrated Buoy for Irregular and Ultra-Low Frequency Ocean Wave Monitoring. Adv. Mater. Technol. 2022, 7, 10. [Google Scholar] [CrossRef]
- Lee, K.; Lee, J.W.; Kim, K.; Yoo, D.; Kim, D.S.; Hwang, W.; Song, I.; Sim, J.Y. A Spherical Hybrid Triboelectric Nanogenerator for Enhanced Water Wave Energy Harvesting. Micromachines 2018, 9, 598. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Xu, P.; Wang, X.Y.; Wang, S.Y.; Chen, T.Y.; Liu, J.H.; Zheng, J.X.; Li, W.X.; Xu, M.Y.; Tao, J.; Xie, G.M. A Triboelectric-Based Artificial Whisker for Reactive Obstacle Avoidance and Local Mapping. Research 2021, 2021, 10. [Google Scholar] [CrossRef]
- Jin, T.; Sun, Z.D.; Li, L.; Zhang, Q.; Zhu, M.L.; Zhang, Z.X.; Yuan, G.J.; Chen, T.; Tian, Y.Z.; Hou, X.Y.; et al. Triboelectric nanogenerator sensors for soft robotics aiming at digital twin applications. Nat. Commun. 2020, 11, 12. [Google Scholar] [CrossRef] [PubMed]
- Phan, T.K.; Wang, S.; Wang, Y.; Wang, H.; Xiao, X.; Pan, X.X.; Xu, M.Y.; Mi, J.C. A Self-Powered and Low Pressure Loss Gas Flowmeter Based on Fluid-Elastic Flutter Driven Triboelectric Nanogenerator. Sensors 2020, 20, 729. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Su, Y.J.; Xie, G.Z.; Xie, T.; Zhang, H.L.; Ye, Z.B.; Jing, Q.S.; Tai, H.L.; Du, X.S.; Jiang, Y.D. Wind energy harvesting and self-powered flow rate sensor enabled by contact electrification. J. Phys. D Appl. Phys. 2016, 49, 8. [Google Scholar] [CrossRef]
- Wang, Y.; Yang, E.; Chen, T.Y.; Wang, J.Y.; Hu, Z.Y.; Mi, J.C.; Pan, X.X.; Xu, M.Y. A novel humidity resisting and wind direction adapting flag-type triboelectric nanogenerator for wind energy harvesting and speed sensing. Nano Energy 2020, 78, 9. [Google Scholar] [CrossRef]
- Zhu, X.Y.; Cao, X.; Wang, Z.L. Windmill-Like Nanogenerator for Harvesting Low-Speed Wind Energy and Wind Speed Measuring. Adv. Mater. Technol. 2022; in press. [Google Scholar] [CrossRef]
- Pistek, V.; Kucera, P.; Fomin, O.; Lovska, A. Effective Mistuning Identification Method of Integrated Bladed Discs of Marine Engine Turbochargers. J. Mar. Sci. Eng. 2020, 8, 379. [Google Scholar] [CrossRef]
- Figari, M.; Theotokatos, G.; Coraddu, A.; Stoumpos, S.; Mondella, T. Parametric investigation and optimal selection of the hybrid turbocharger system for a large marine four-stroke dual-fuel engine. Appl. Therm. Eng. 2022, 208, 17. [Google Scholar] [CrossRef]
- Tien, W.K.; Yeh, R.H.; Hong, J.M. Theoretical analysis of cogeneration system for ships. Energy Conv. Manag. 2007, 48, 1965–1974. [Google Scholar] [CrossRef]
- Zou, H.Y.; Zhang, Y.; Guo, L.T.; Wang, P.H.; He, X.; Dai, G.Z.; Zheng, H.W.; Chen, C.Y.; Wang, A.C.; Xu, C.; et al. Quantifying the triboelectric series. Nat. Commun. 2019, 10, 9. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Chen, J.; Guo, H.Y.; Hu, C.G.; Wang, Z.L. Robust Triboelectric Nanogenerator Achieved by Centrifugal Force Induced Automatic Working Mode Transition. Adv. Energy Mater. 2020, 10, 8. [Google Scholar] [CrossRef]
- Niu, S.M.; Liu, Y.; Chen, X.Y.; Wang, S.H.; Zhou, Y.S.; Lin, L.; Xie, Y.N.; Wang, Z.L. Theory of freestanding triboelectric-layer-based nanogenerators. Nano Energy 2015, 12, 760–774. [Google Scholar] [CrossRef] [Green Version]
- Fang, Y.; Tang, T.Y.; Li, Y.F.; Hou, C.; Wen, F.; Yang, Z.; Chen, T.; Sun, L.N.; Liu, H.C.; Lee, C.K. A high-performance triboelectric-electromagnetic hybrid wind energy harvester based on rotational tapered rollers aiming at outdoor IoT applications. iScience 2021, 24, 24. [Google Scholar] [CrossRef] [PubMed]


Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Du, T.; Dong, F.; Zhu, M.; Xi, Z.; Li, F.; Zou, Y.; Sun, P.; Xu, M. Self-Powered and Robust Marine Exhaust Gas Flow Sensor Based on Bearing Type Triboelectric Nanogenerator. J. Mar. Sci. Eng. 2022, 10, 1416. https://doi.org/10.3390/jmse10101416
Du T, Dong F, Zhu M, Xi Z, Li F, Zou Y, Sun P, Xu M. Self-Powered and Robust Marine Exhaust Gas Flow Sensor Based on Bearing Type Triboelectric Nanogenerator. Journal of Marine Science and Engineering. 2022; 10(10):1416. https://doi.org/10.3390/jmse10101416
Chicago/Turabian StyleDu, Taili, Fangyang Dong, Meixian Zhu, Ziyue Xi, Fangming Li, Yongjiu Zou, Peiting Sun, and Minyi Xu. 2022. "Self-Powered and Robust Marine Exhaust Gas Flow Sensor Based on Bearing Type Triboelectric Nanogenerator" Journal of Marine Science and Engineering 10, no. 10: 1416. https://doi.org/10.3390/jmse10101416