



Study of the LQRY-SMC Control Method for the Longitudinal Motion of Fully Submerged Hydrofoil Crafts



Abstract
:1. Introduction
2. Mathematical Model of Longitudinal Motion
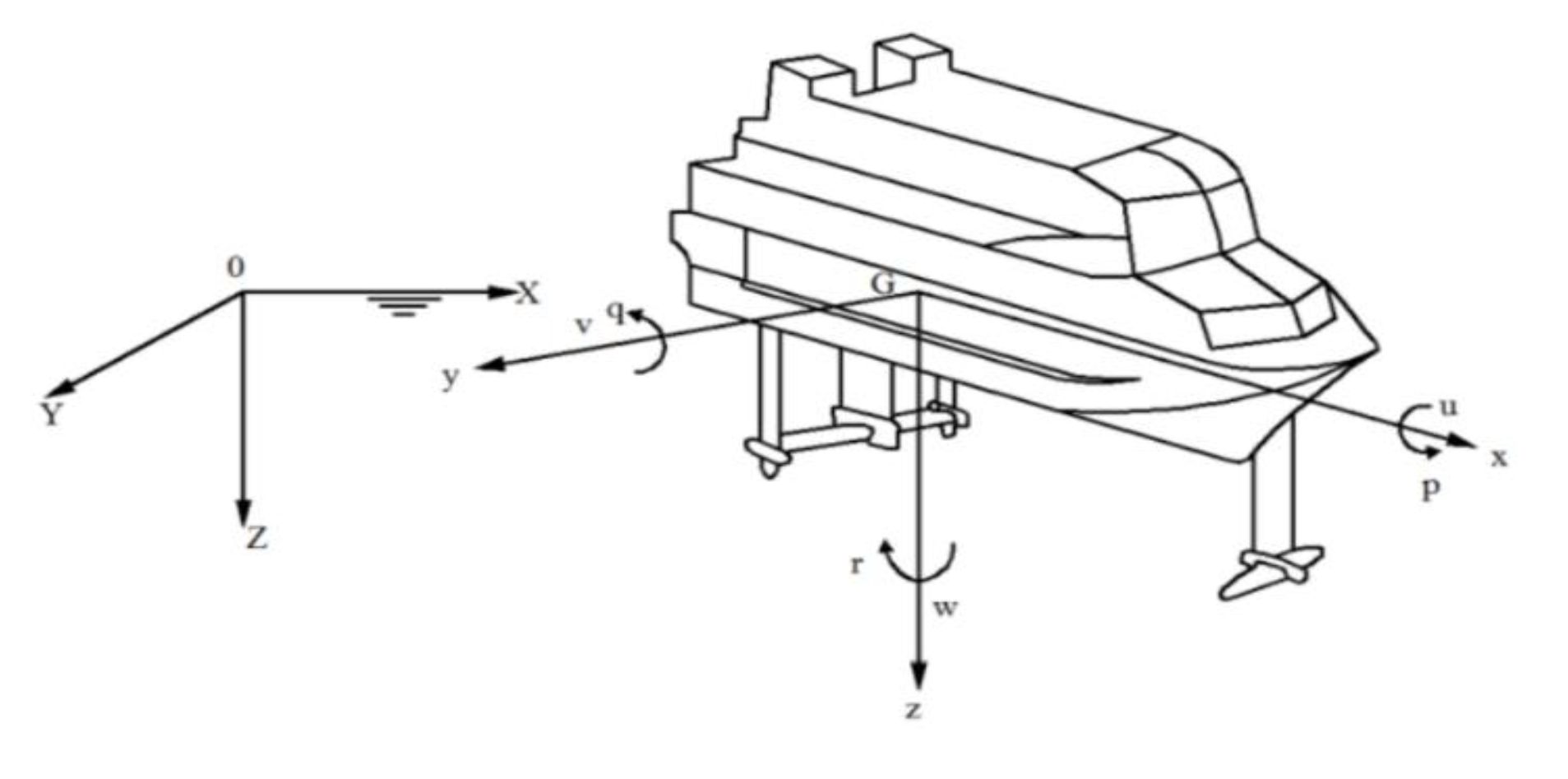
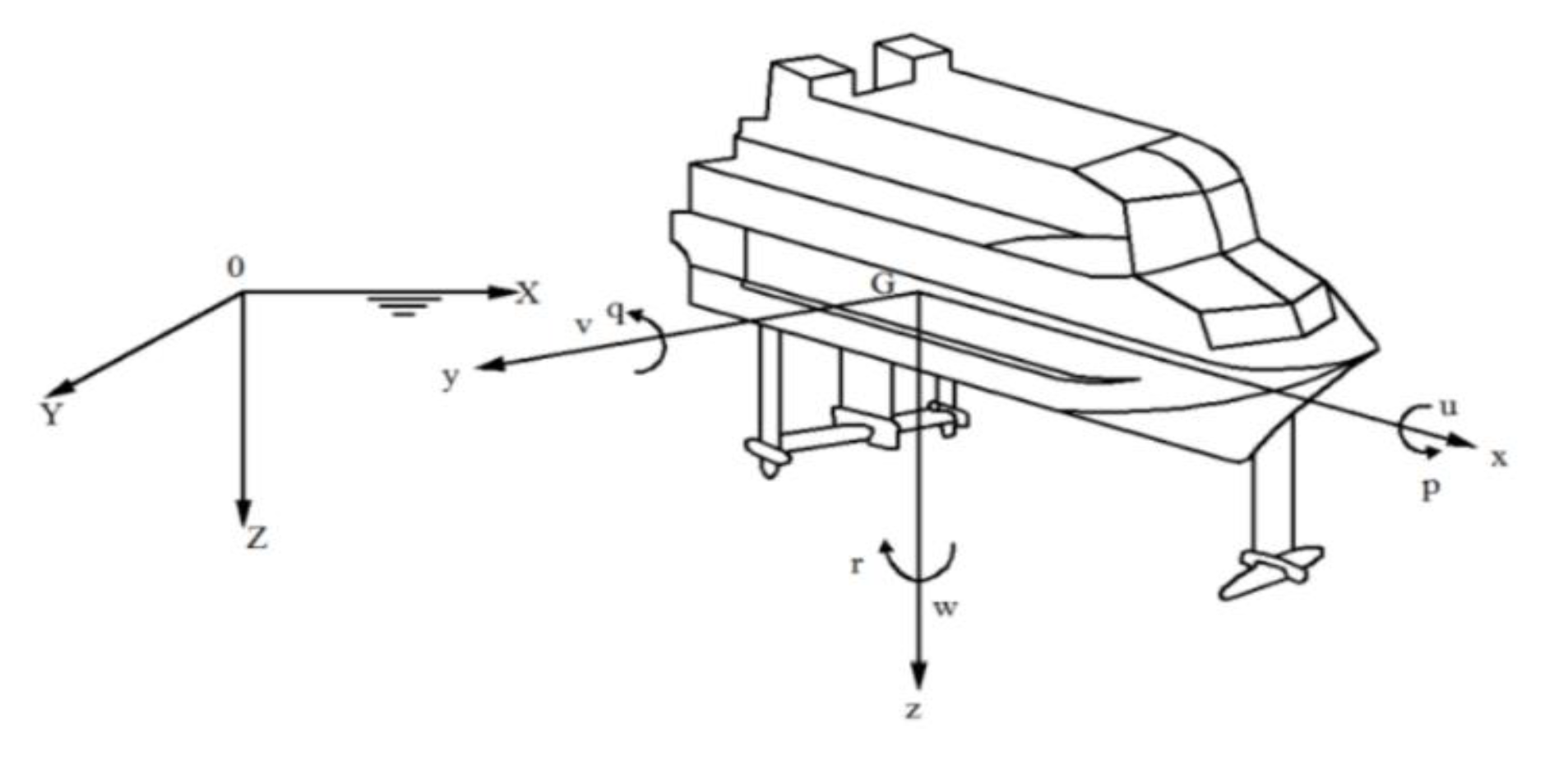
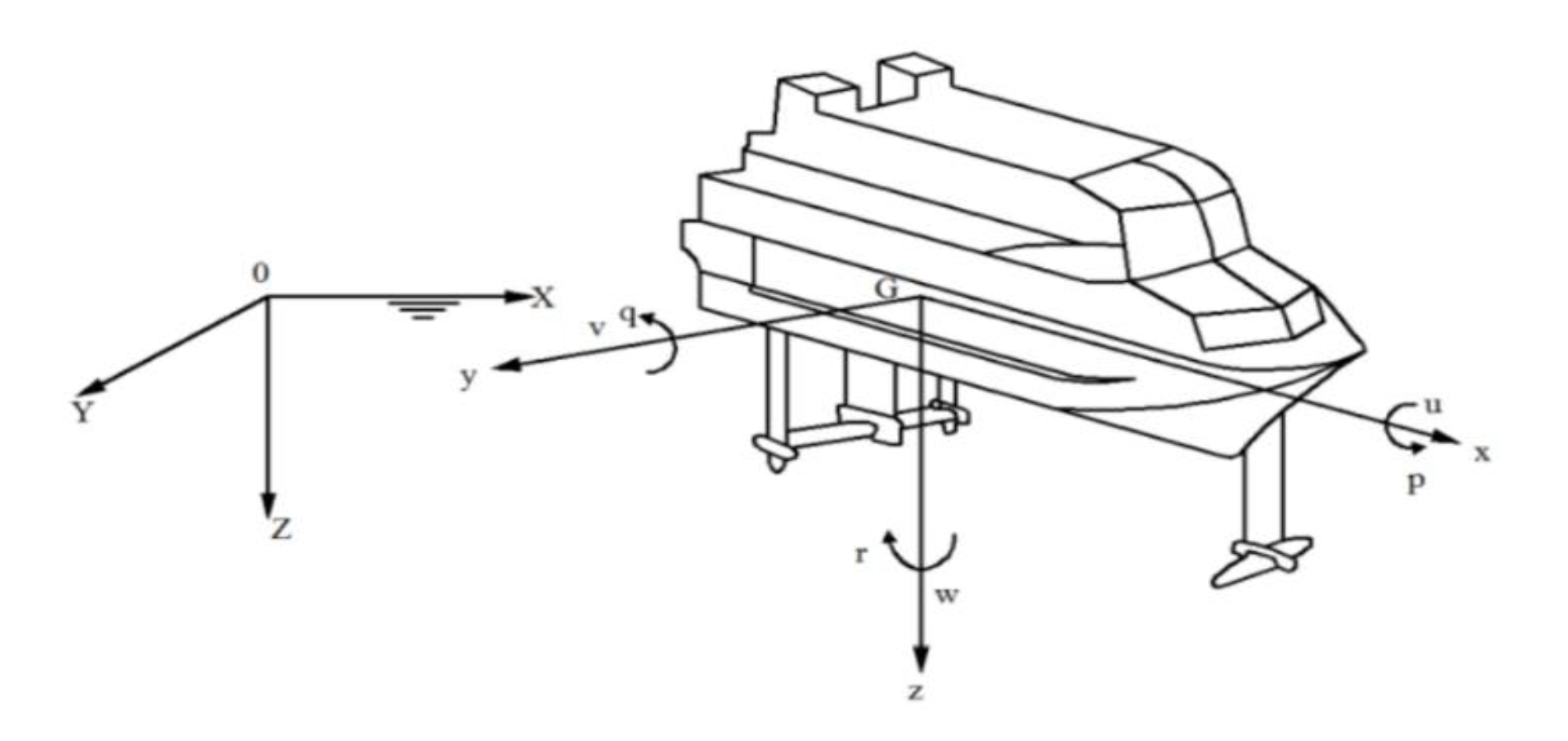
2.1. Construction of Longitudinal Model of Hydrofoil Craft
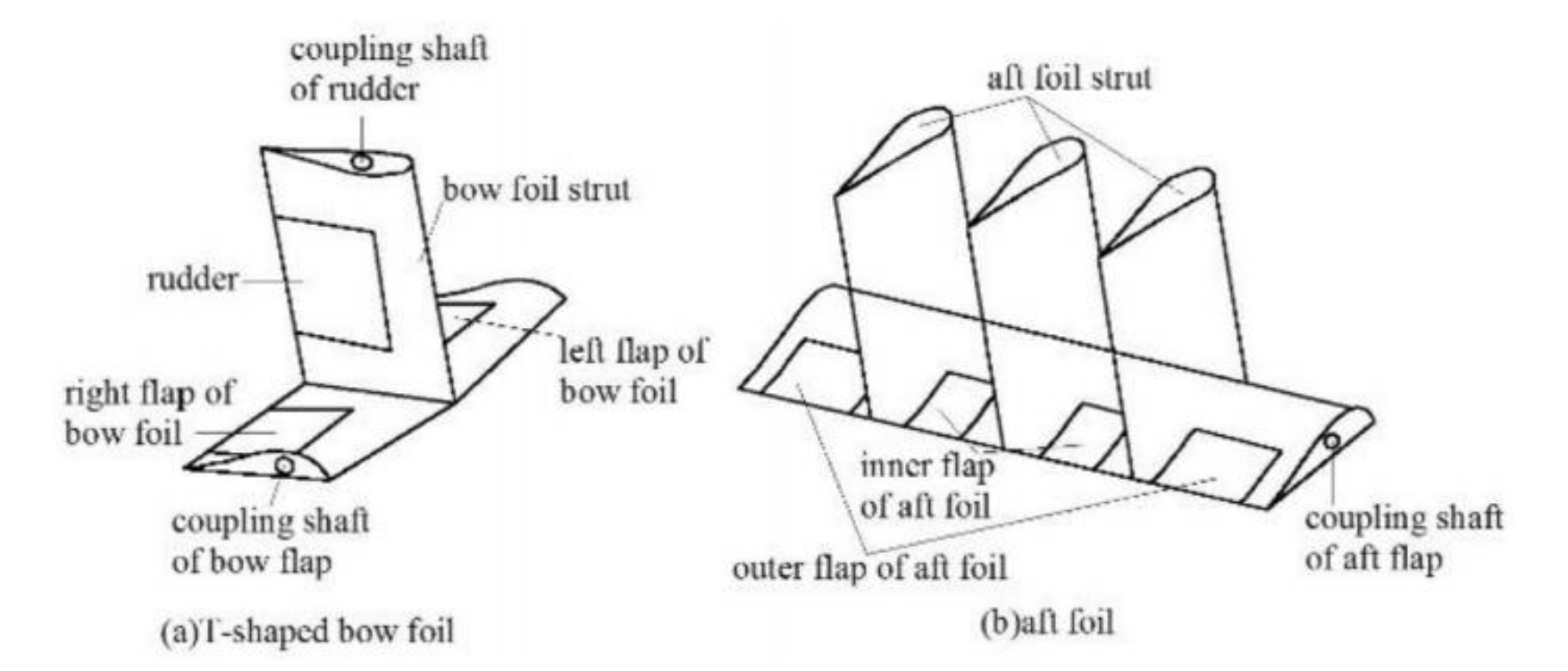
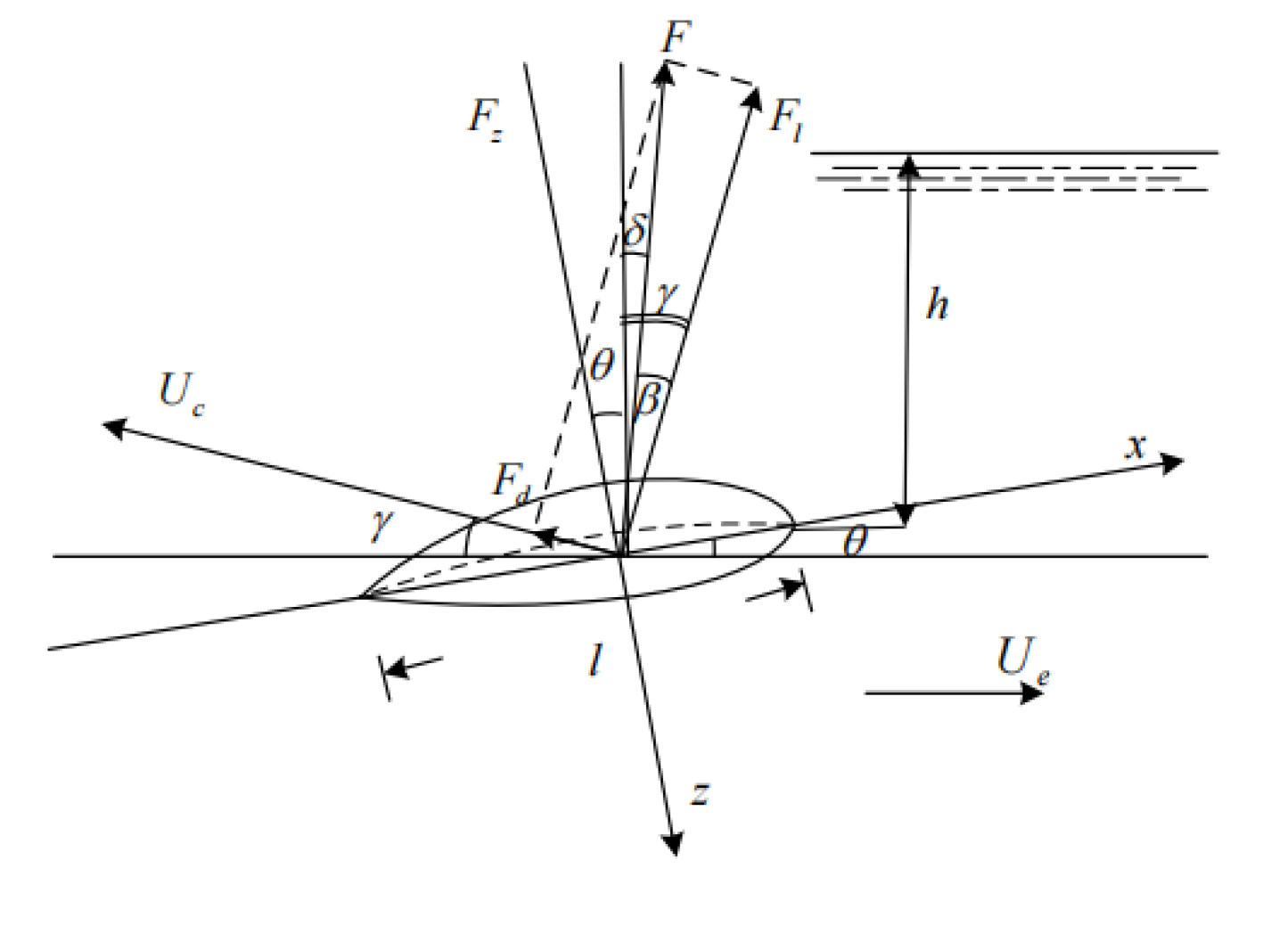
2.2. Force analysis of Hydrofoil
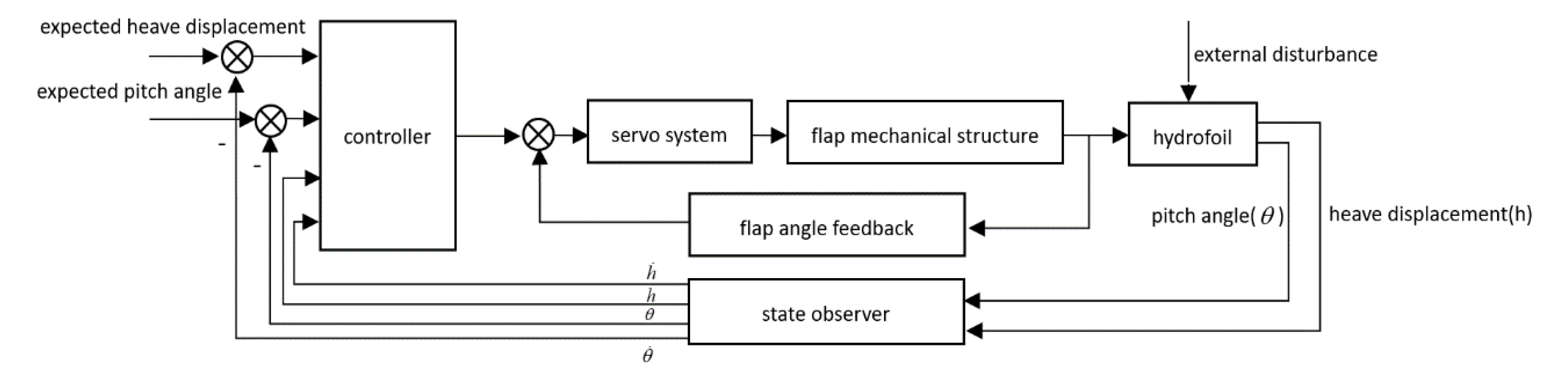
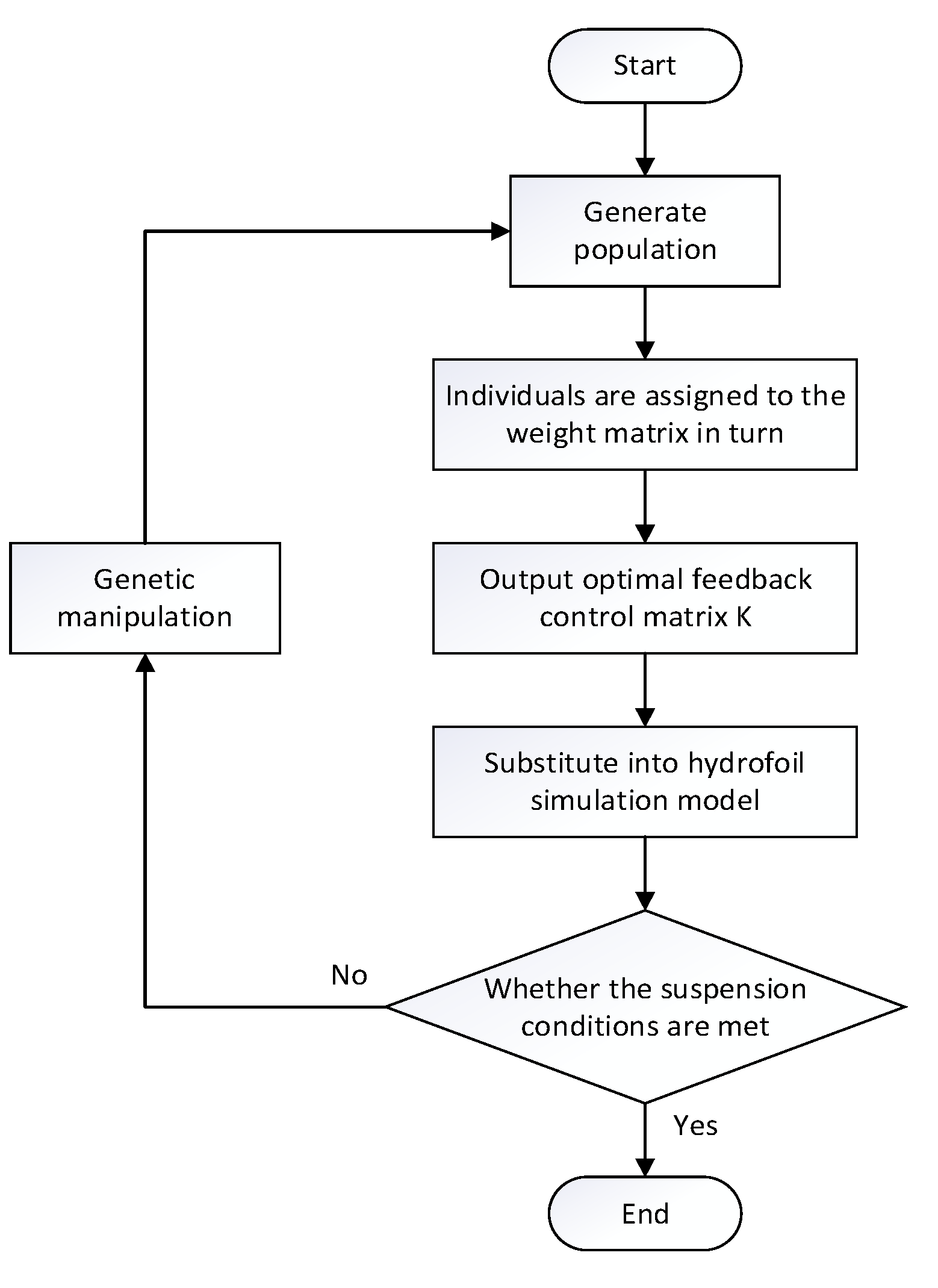
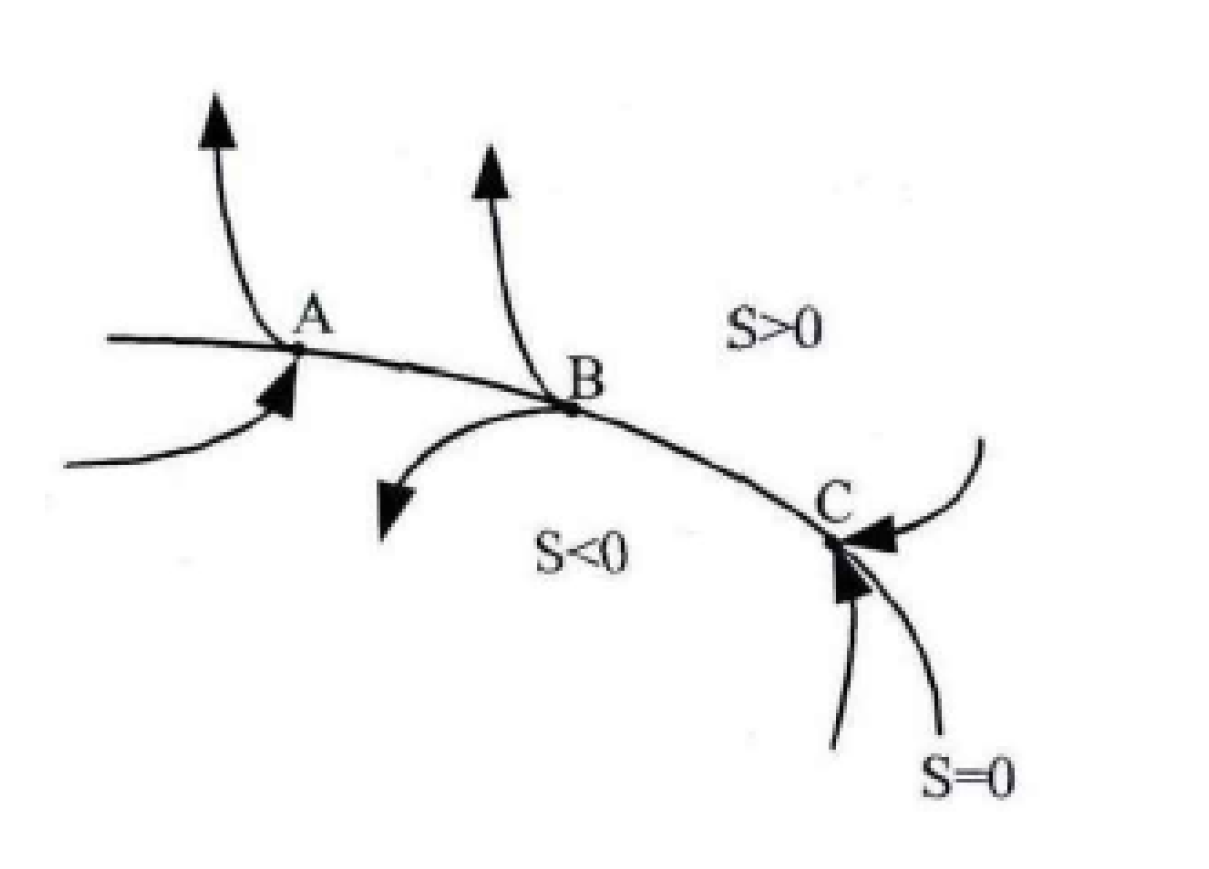
3. Design of Longitudinal Motion Controller of Hydrofoil Based on LQR/LQRY-SMC
4. Design of Longitudinal Motion Controller of Hydrofoil Based on LQR/LQRY-SMC
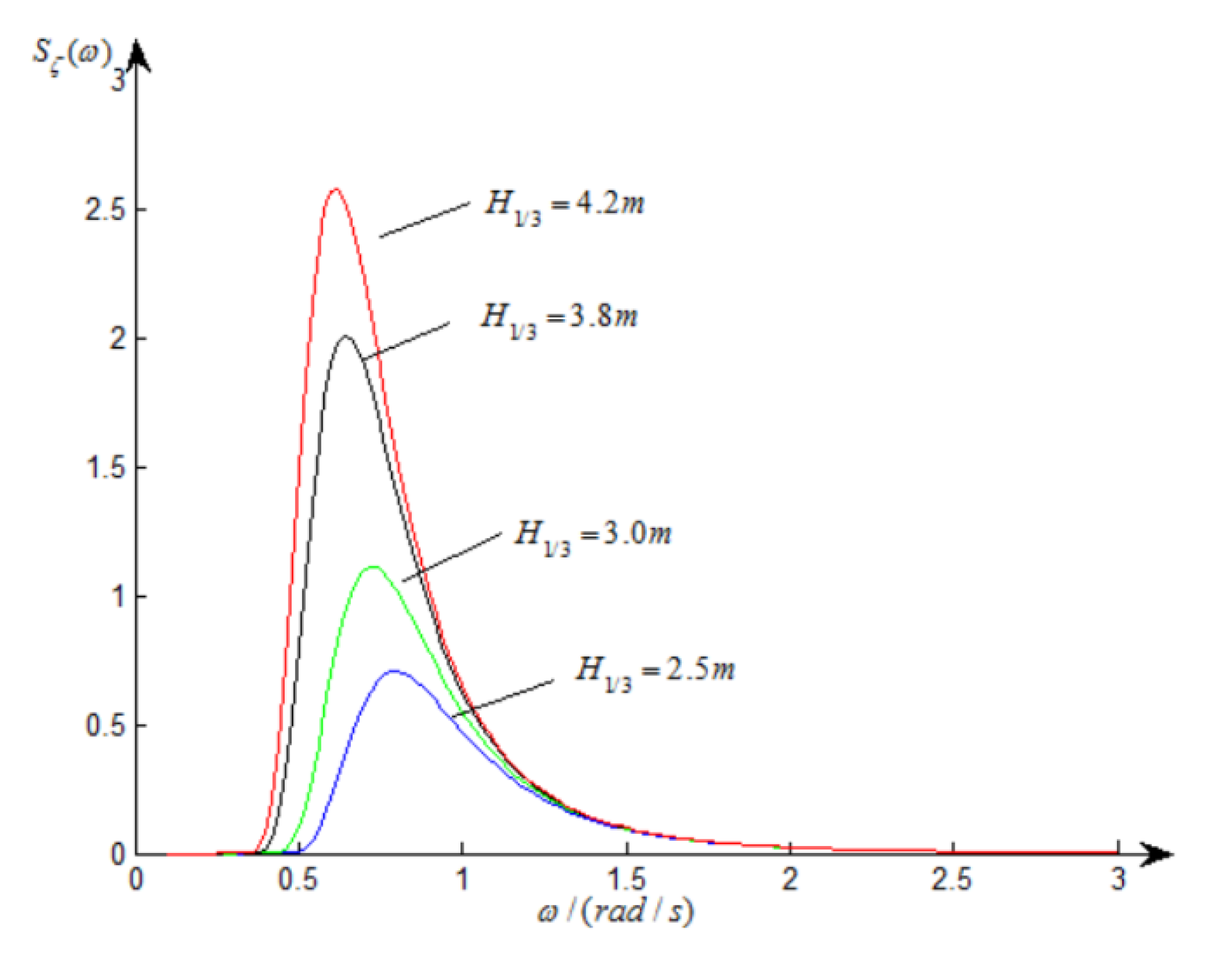
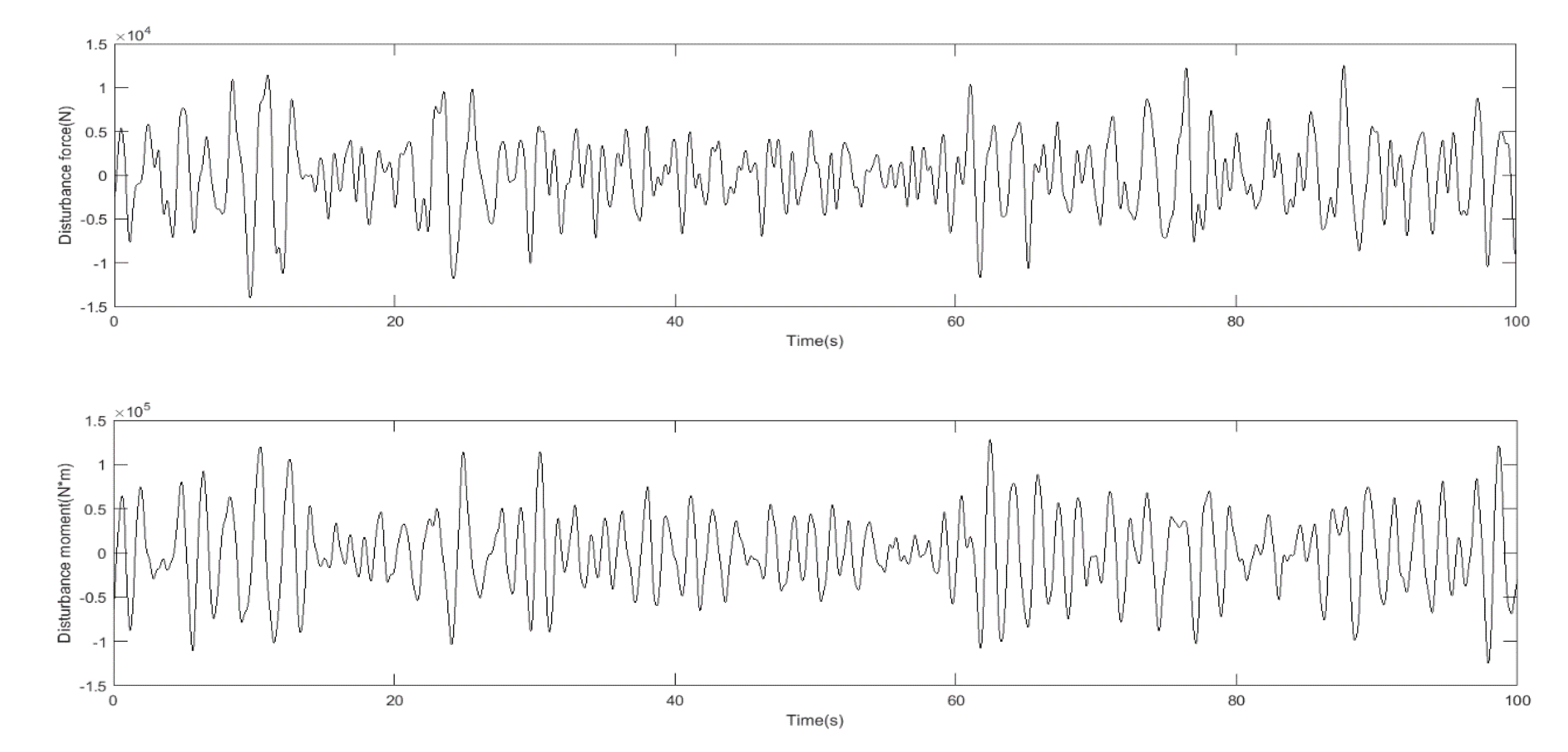
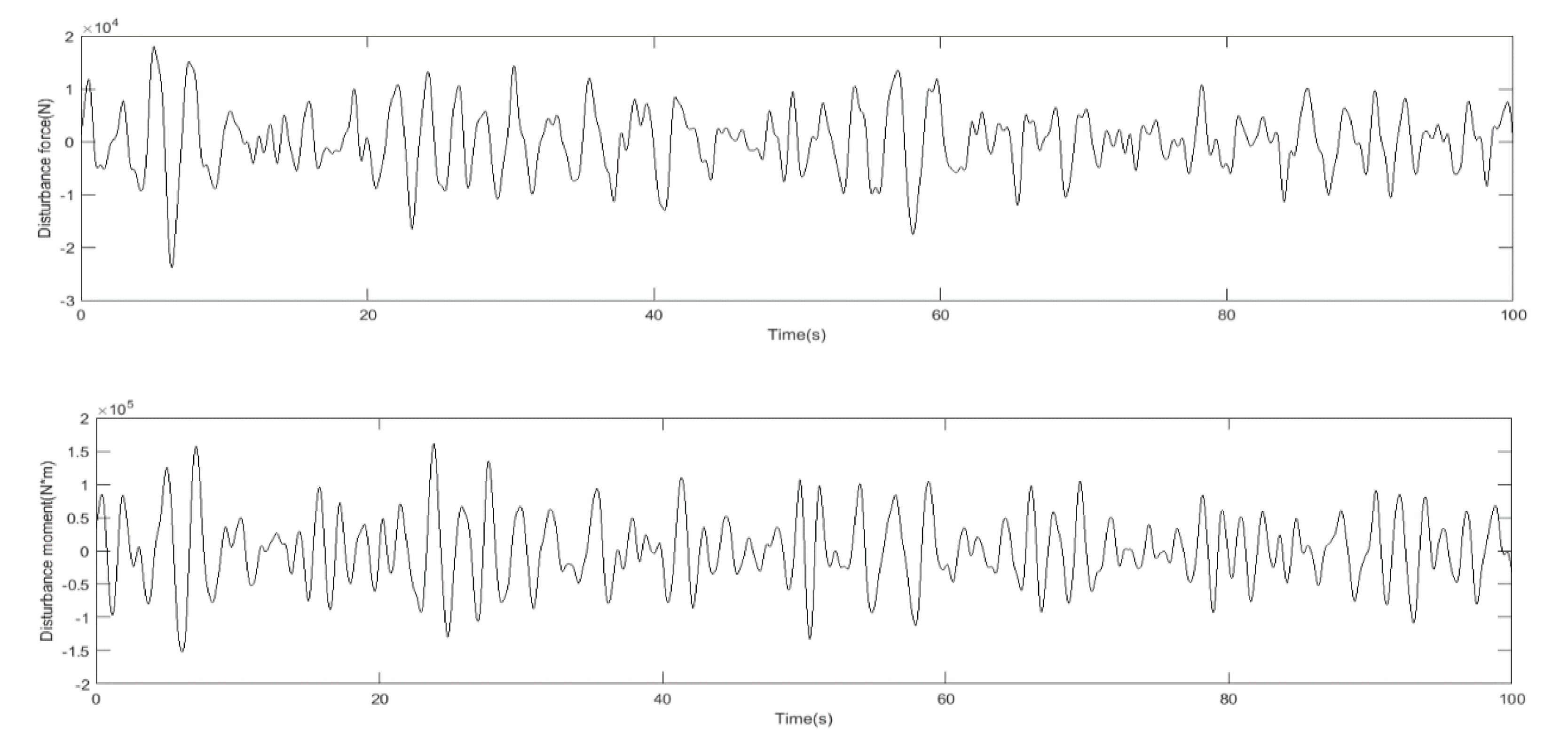
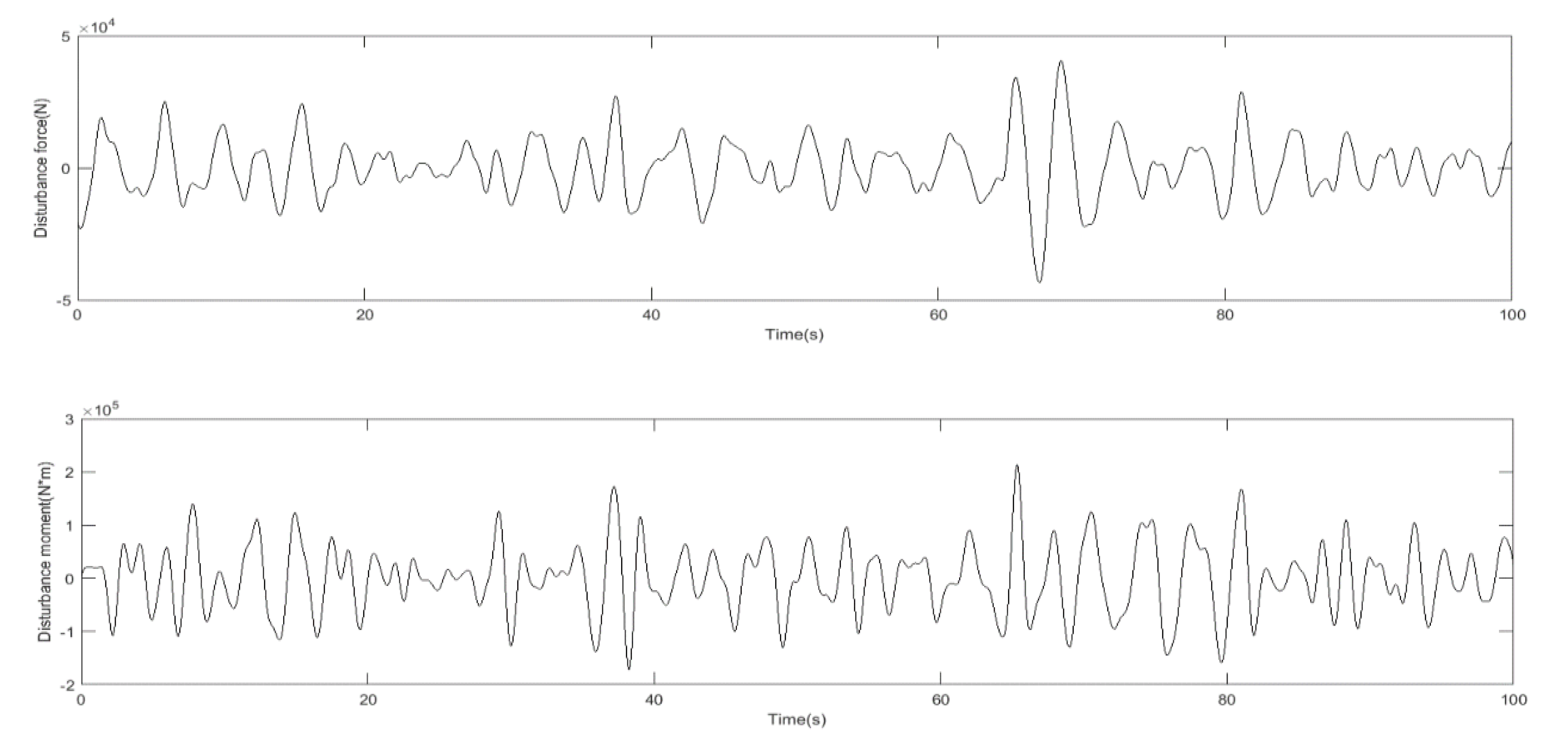
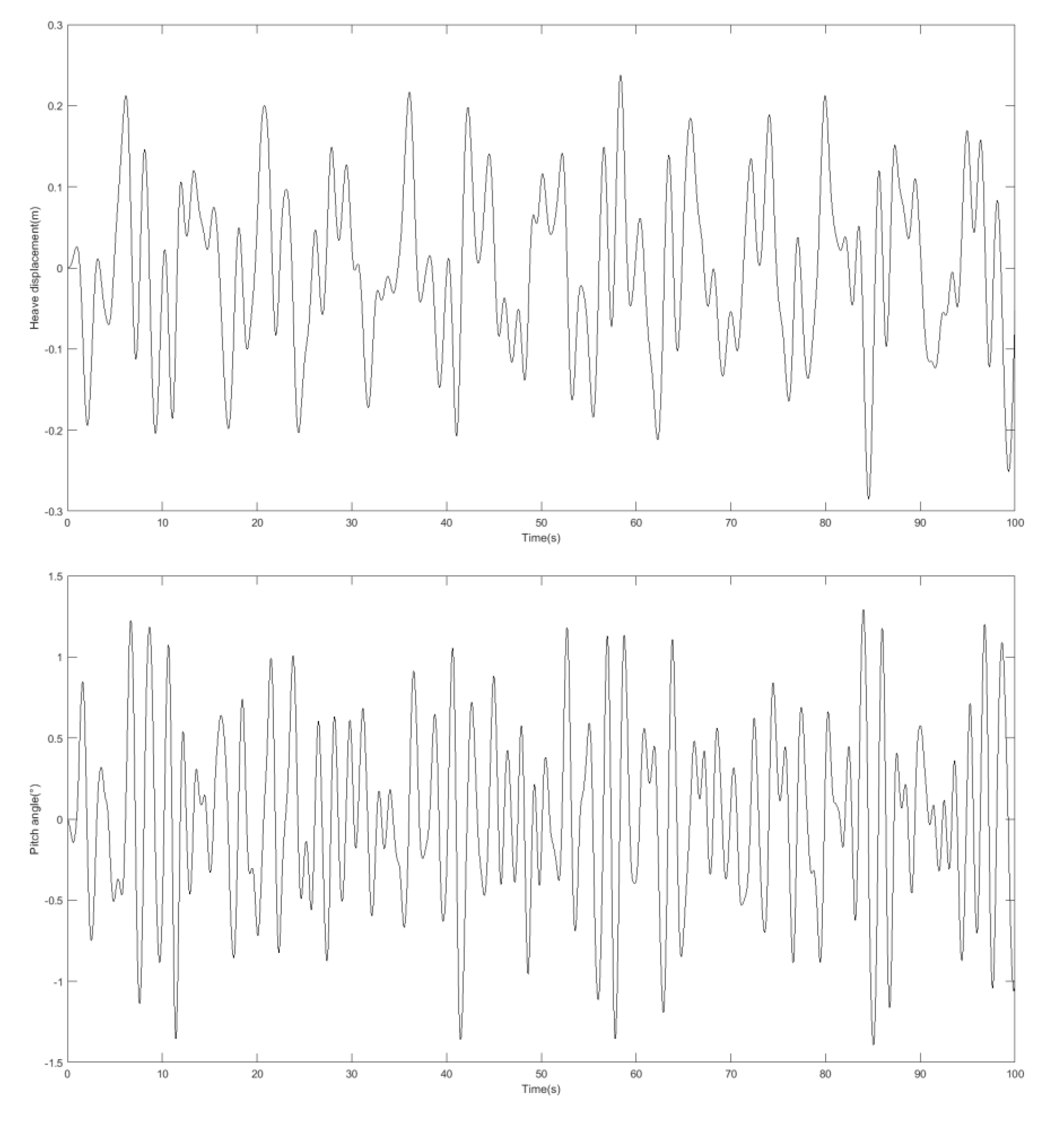
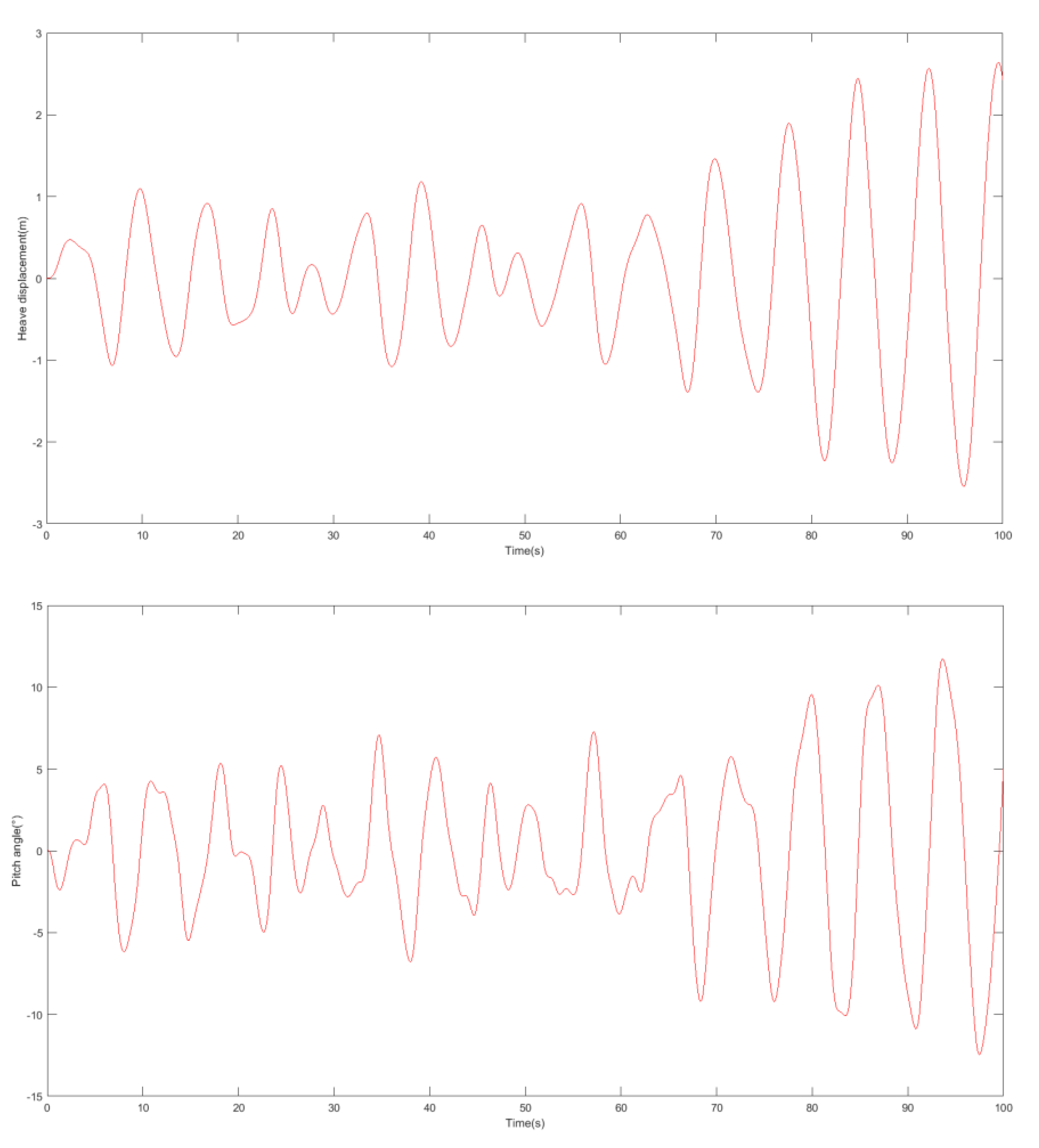
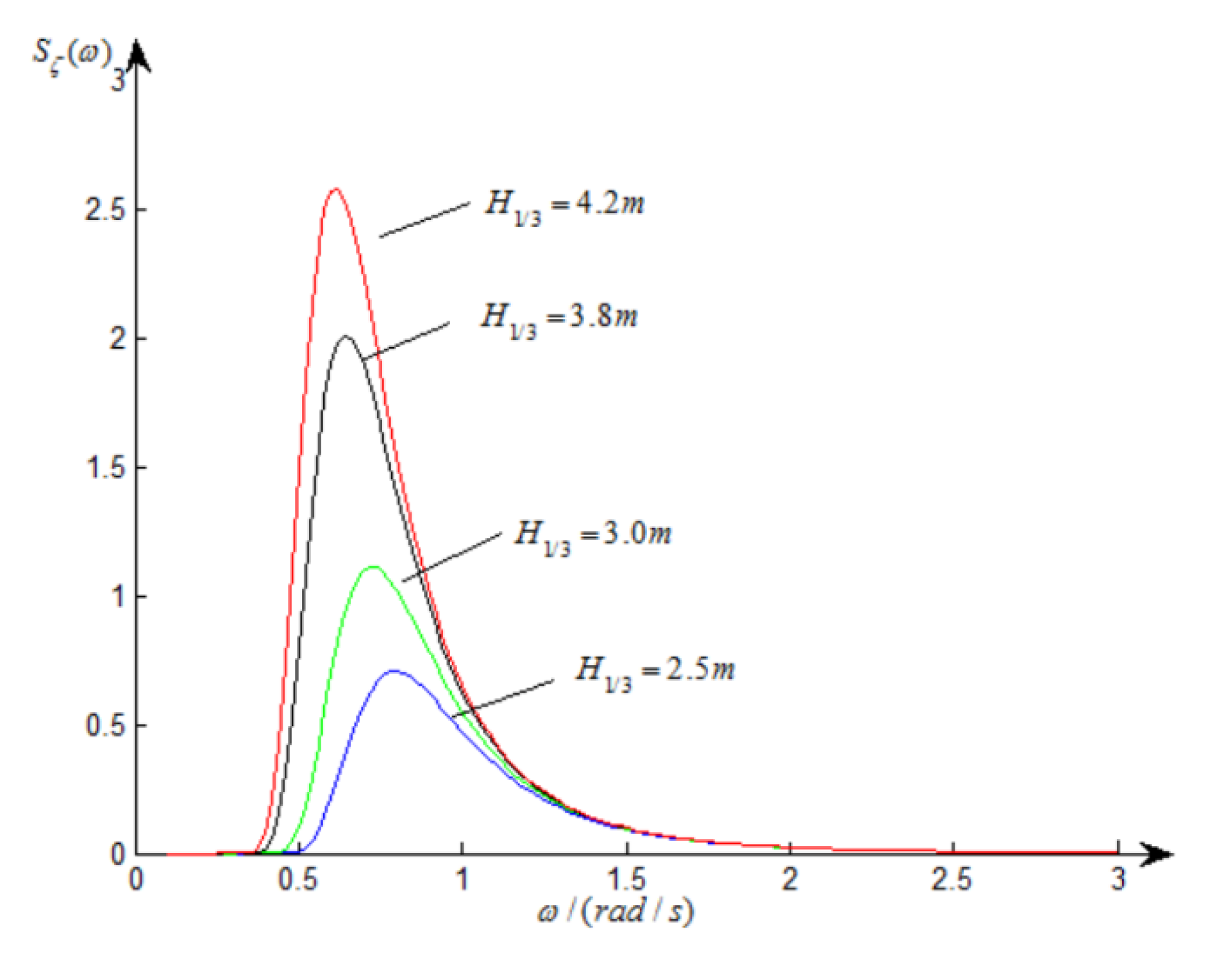
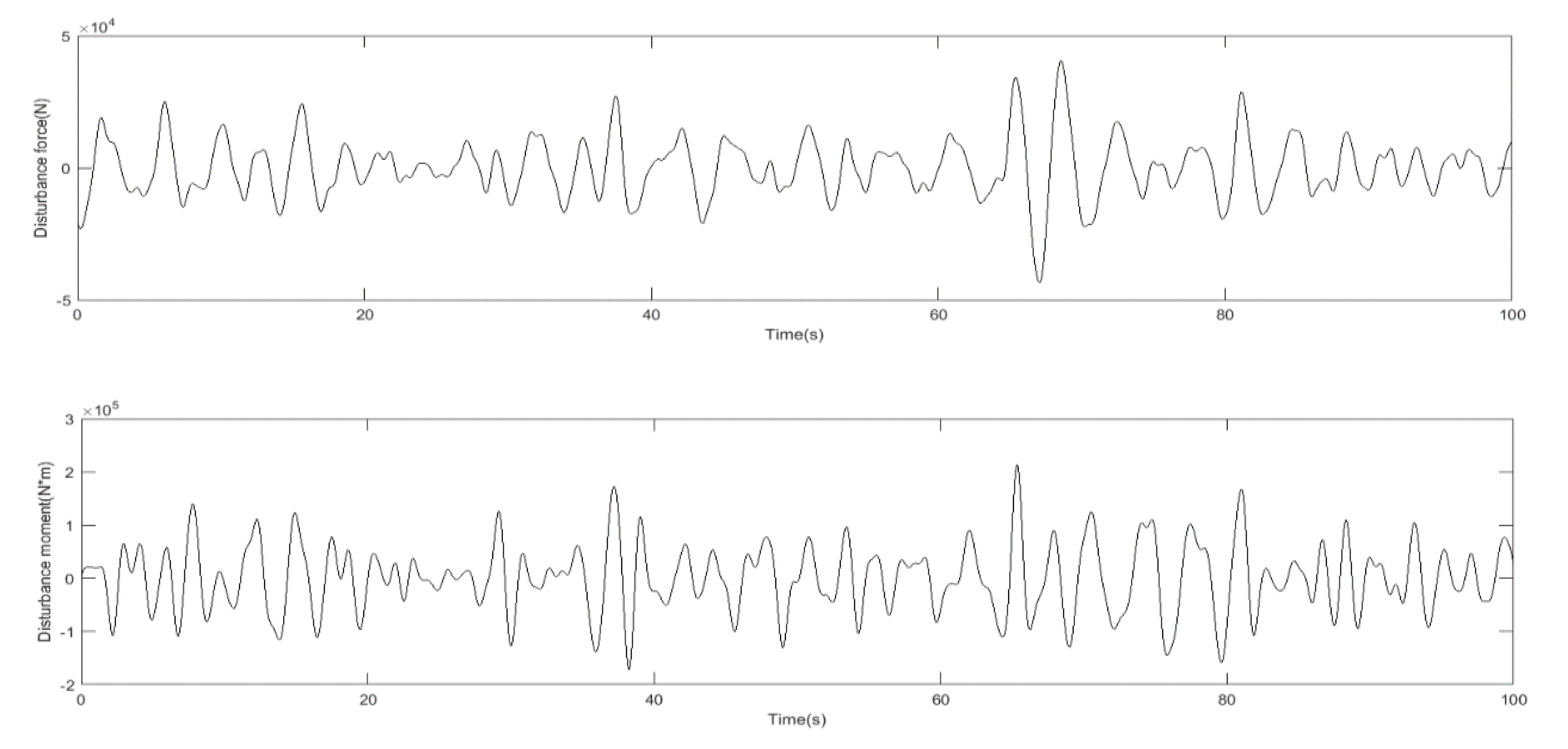
4.1. Simulation of Disturbance Force and Moment
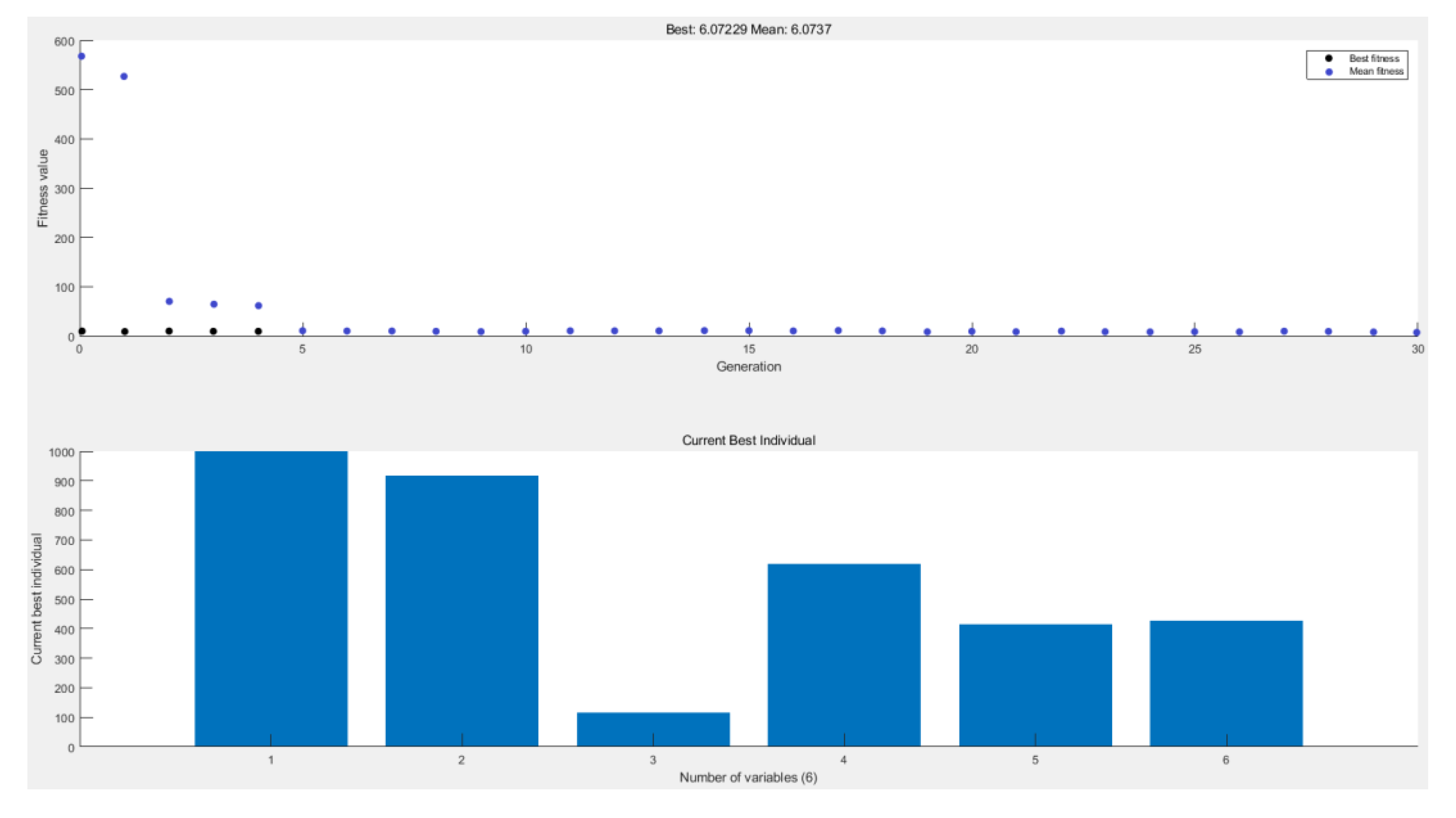
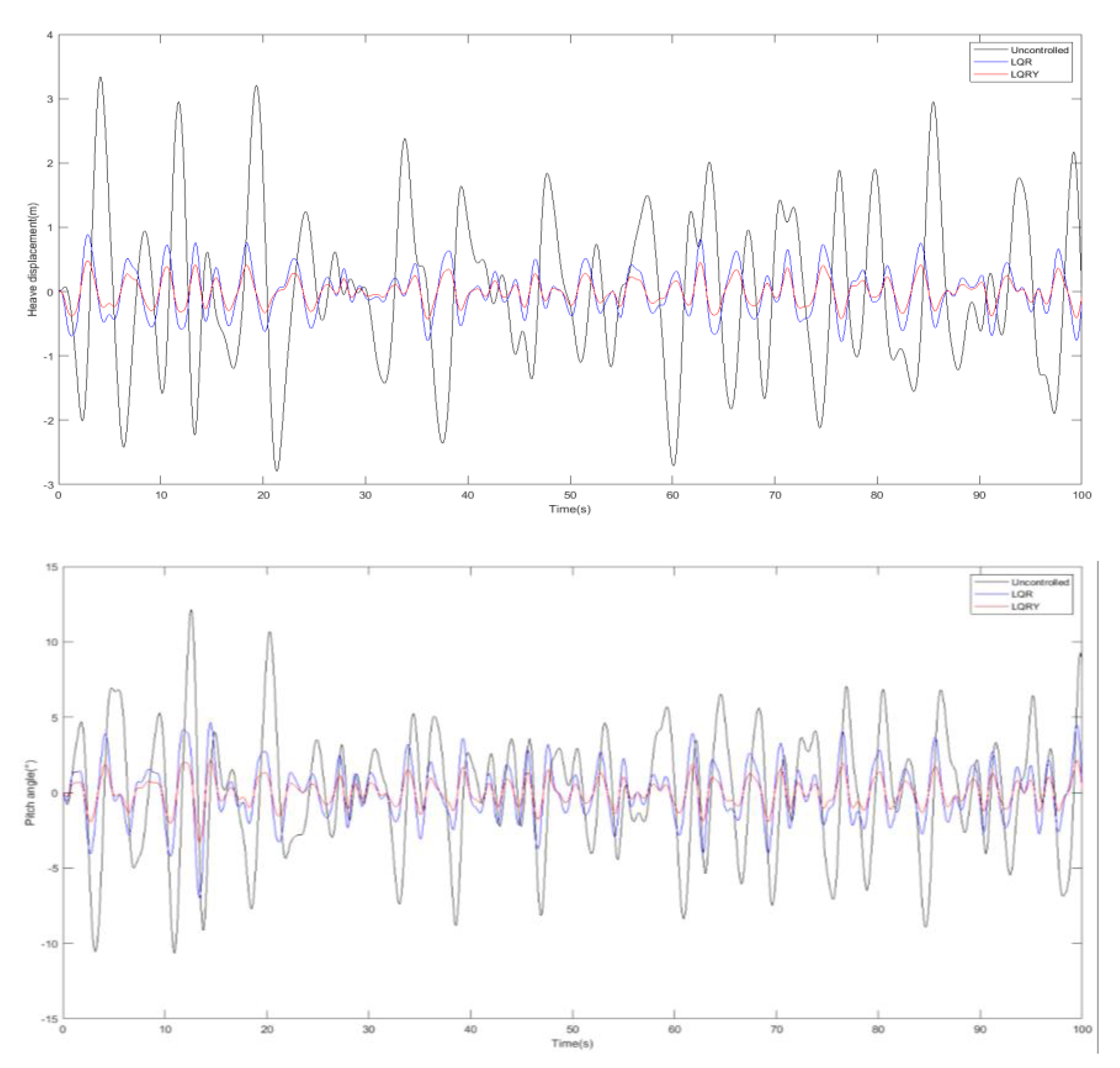
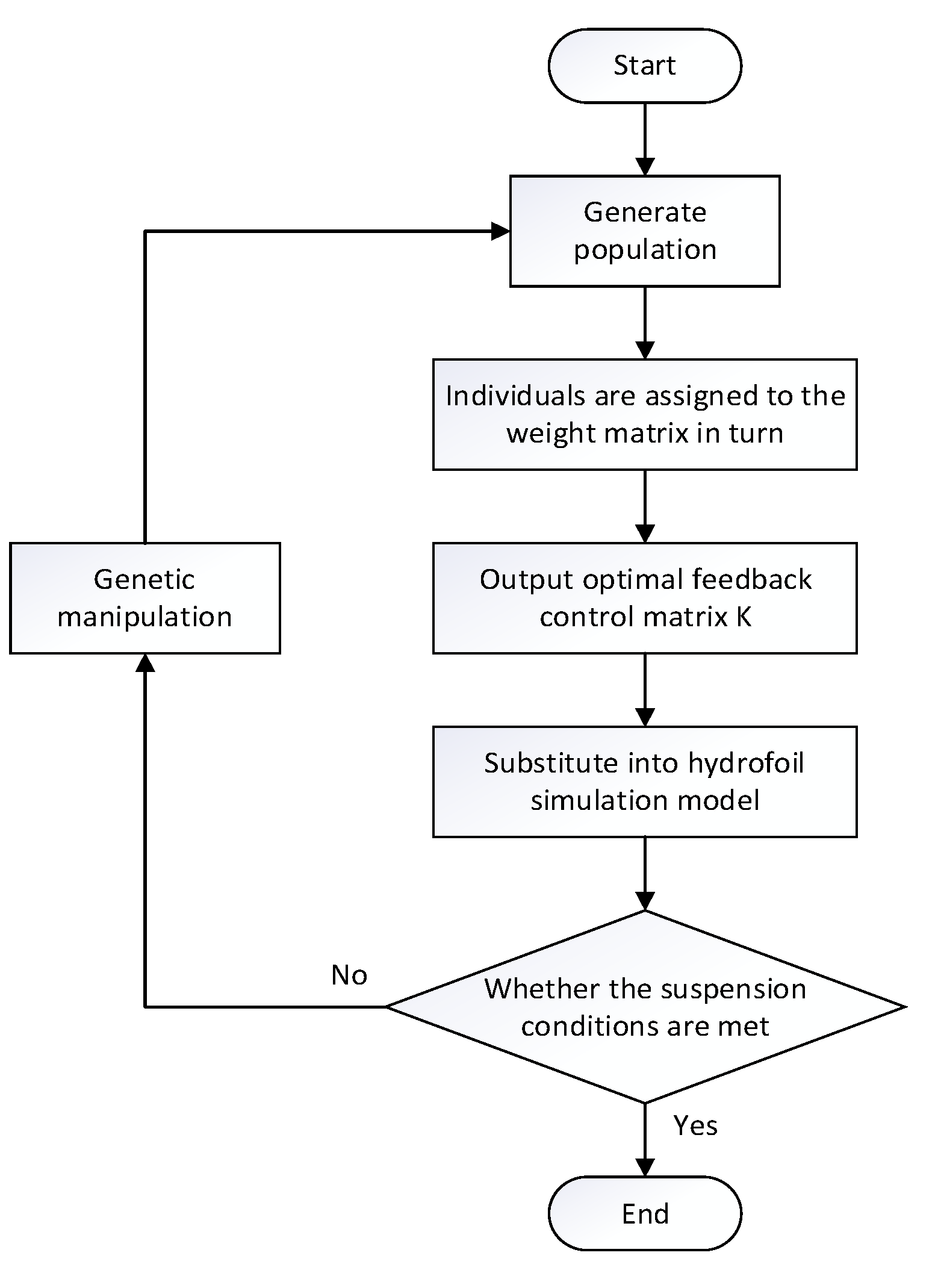
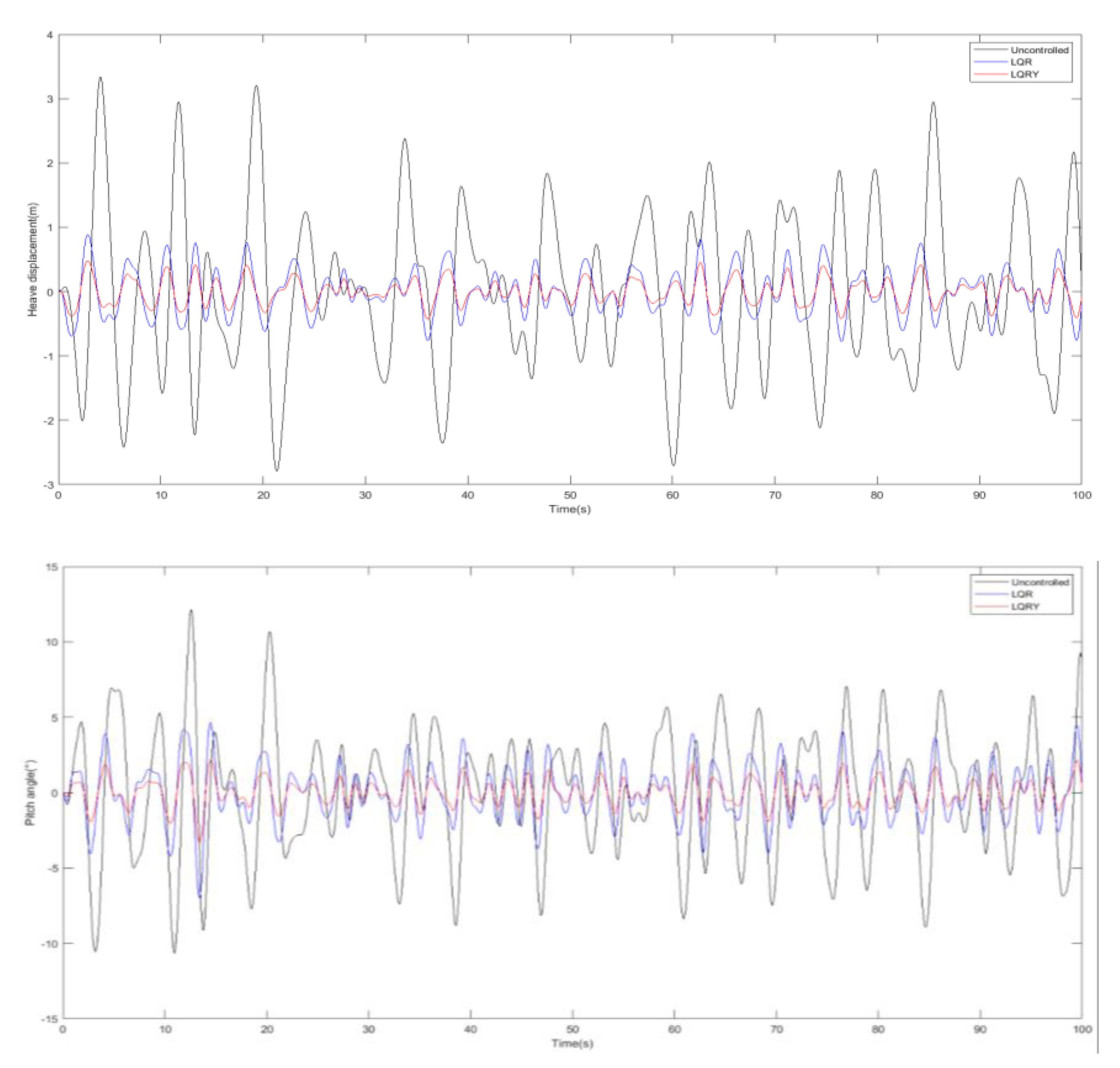
4.2. Comparative Simulation of Optimized LQR and LQRY Simulation
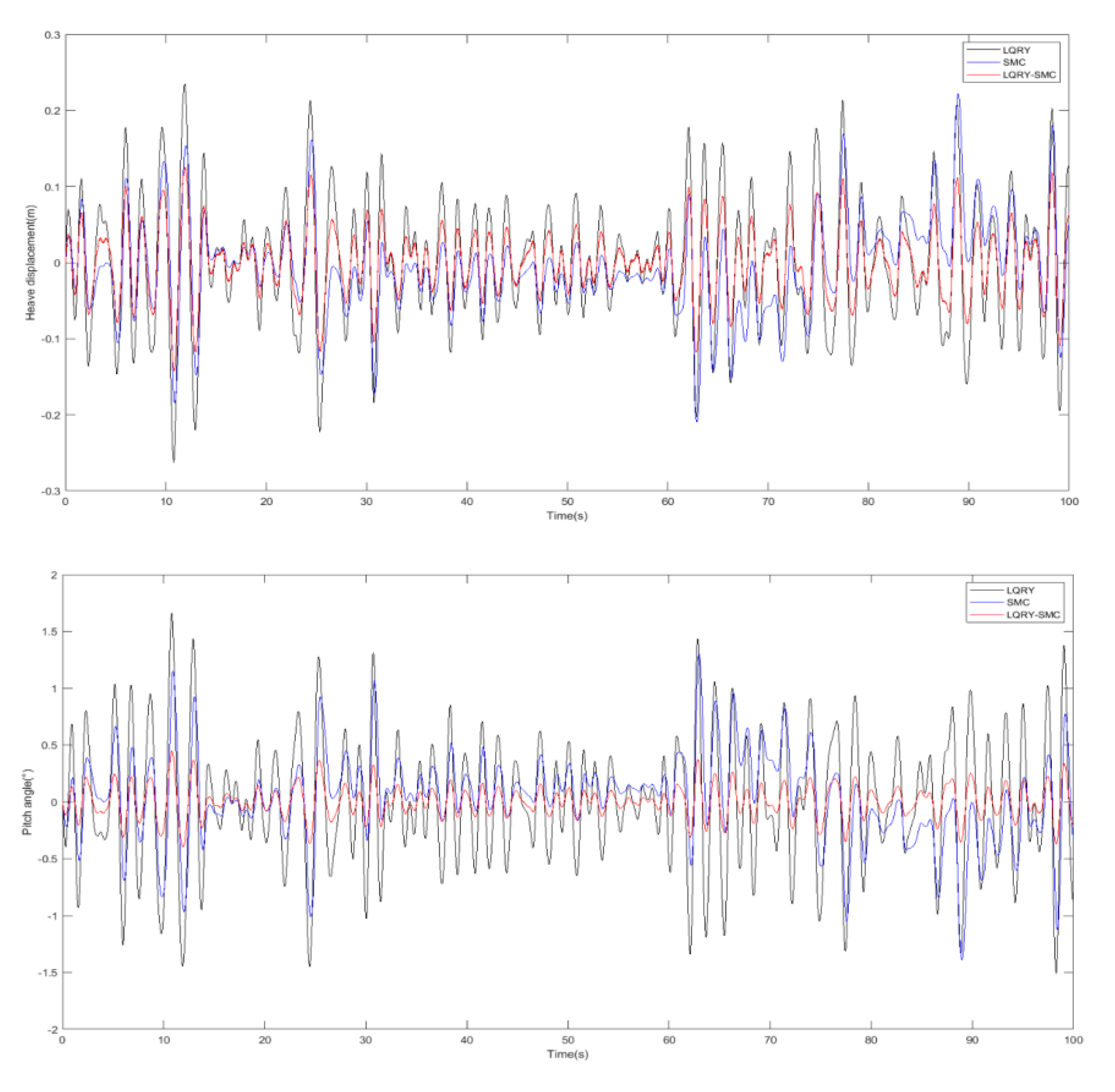
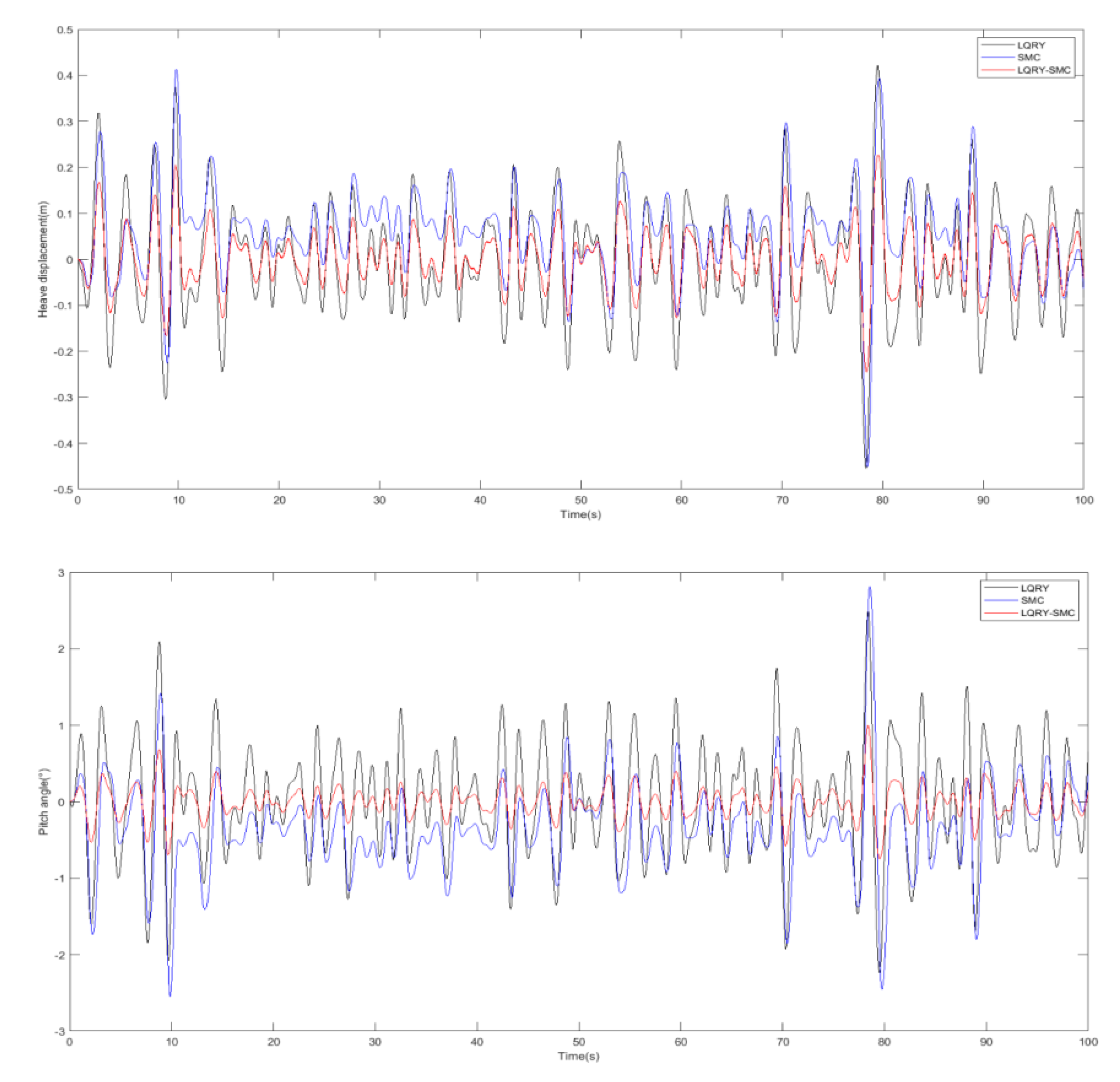
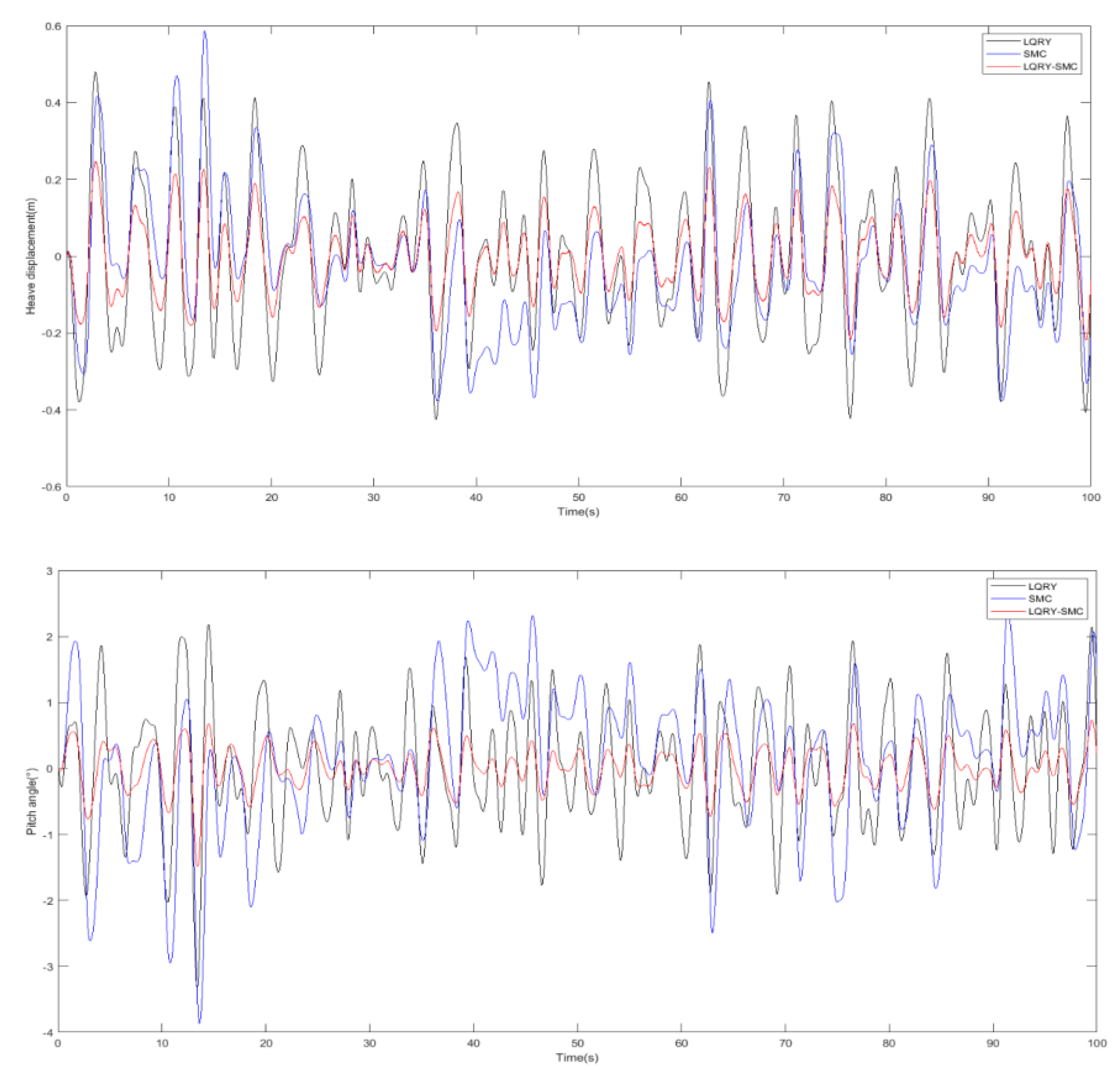
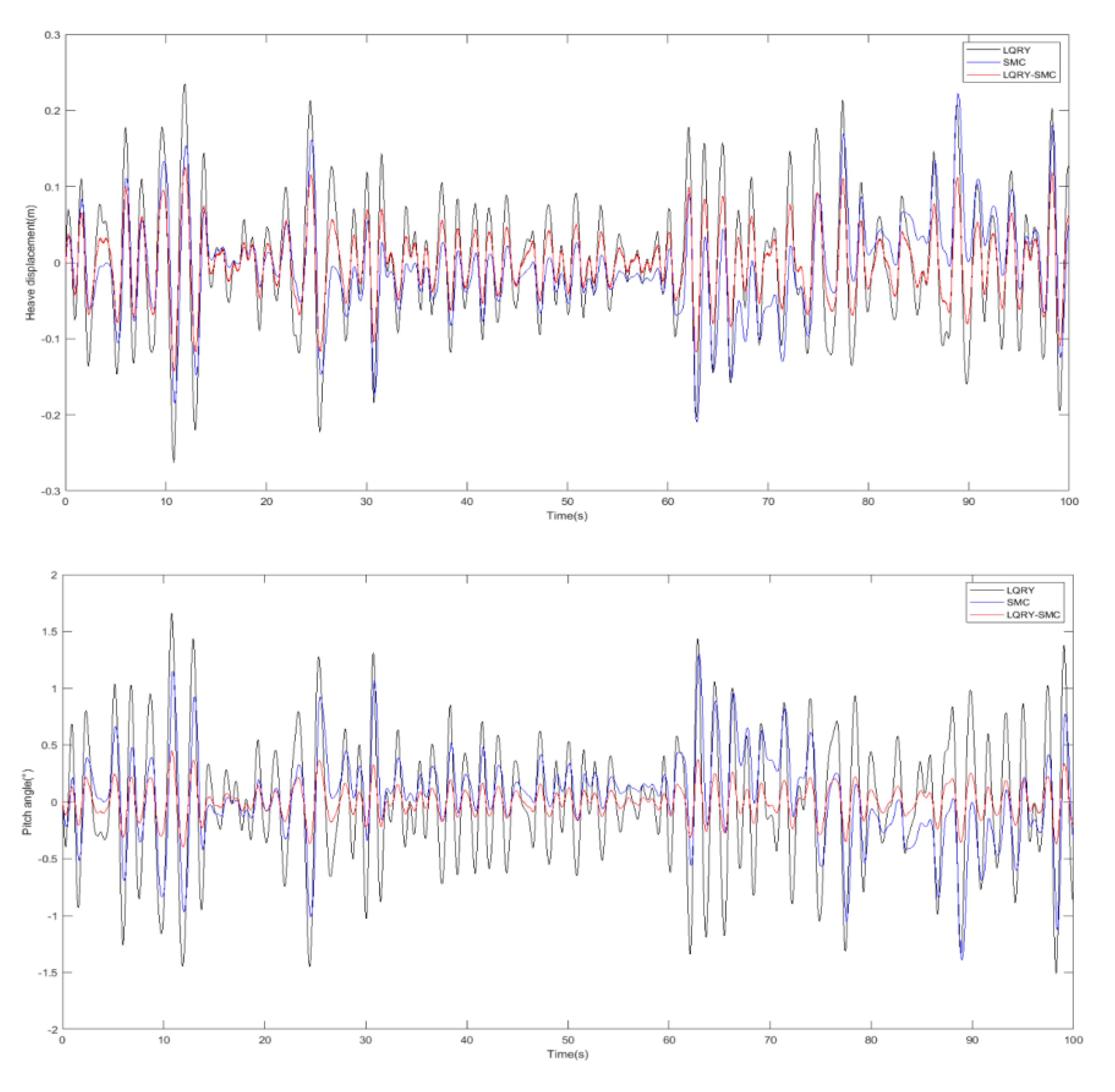
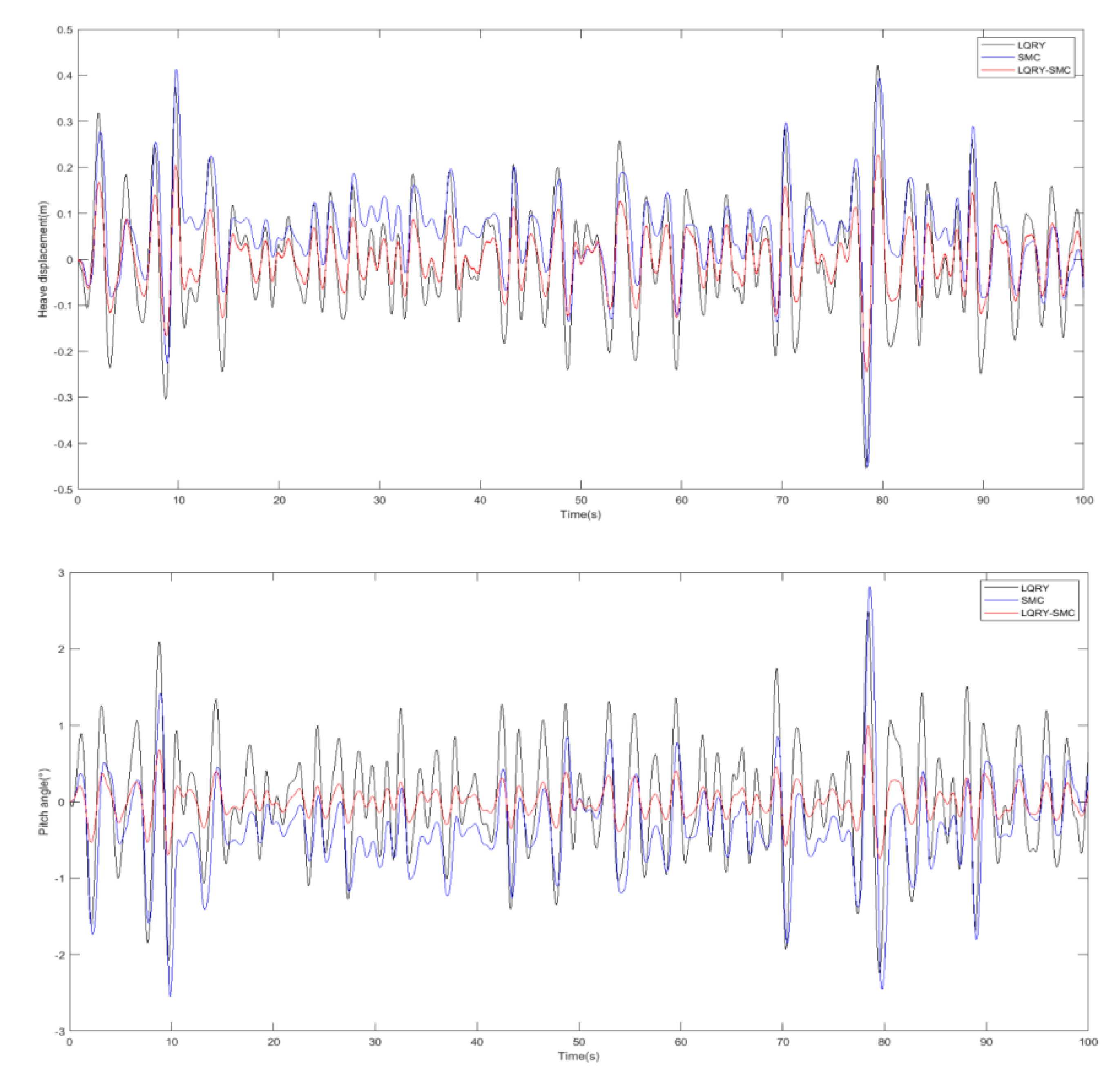
4.3. Comparative Simulation of LQRY, SMC and LQRY-SMC
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Ruggiero, V.; Morace, F. Methodology to study the comfort implementation for a new generation of hydrofoils. Int. J. Interact. Des. Manuf. (IJIDeM) 2019, 13, 99–110. [Google Scholar] [CrossRef]
- Wang, Y.; Liu, S.; Su, X. Hydrofoil catamaran longitudinal motion robust gain scheduling control study. In Proceedings of the 33rd Chinese Control Conference, Nanjing, China, 28–30 July 2014; pp. 1983–1987. [Google Scholar]
- Ling, H.; Wang, Z.; Wu, N. On prediction of longitudinal attitude of planing craft based on controllable hydrofoils. J. Mar. Sci. Appl. 2013, 12, 272–278. [Google Scholar] [CrossRef]
- Piene, E.B. Disturbance Rejection of a High Speed Hydrofoil Craft Using a Frequency Weighted H2-Optimal Controller. Master’s Thesis, Norwegian University of Science and Technology, Trondheim, Norway, 2018. [Google Scholar]
- Matdaud, Z.; Zhahir, A.; Pua’at, A.A.; Hassan, A.; Ahmad, M.T. Stabilizing Attitude Control for Mobility of Wing in Ground (WIG) Craft—A Review. IOP Conf. Ser. Mater. Sci. Eng. 2019, 642, 012005. [Google Scholar] [CrossRef]
- Hu, K.; Ding, Y.; Wang, H. High-speed catamaran’s longitudinal motion attenuation with active hydrofoils. Pol. Marit. Rearch 2018, 25, 56–61. [Google Scholar] [CrossRef]
- Kim, S.-H.; Yamato, H. An experimental study of the longitudinal motion control of a fully submerged hydrofoil model in following seas. Ocean. Eng. 2004, 31, 523–537. [Google Scholar] [CrossRef]
- Kim, S.-H.; Yamato, H. On the design of a longitudinal motion control system of a fully-submerged hydrofoil craft based on the optimal preview servo system. Ocean. Eng. 2004, 31, 1637–1653. [Google Scholar] [CrossRef]
- Hongli, C.; Haokai, L.; Xiaojing, X.; Xiaoyue, Z. Design of adaptive sliding mode controller for longitudinal motion of hydrofoil. In Proceedings of the OCEANS 2019, Marseille, France, 17–20 June 2019; pp. 1–9. [Google Scholar]
- Schaaf, J. Using Reinforcement Learning to Control Hydrofoils. Bachelor’s Thesis, University of Twente, Enschede, The Netherlands, 2022. [Google Scholar]
- Gao, H.; Lv, Y.; Ma, G.; Li, C. Backstepping sliding mode control for combined spacecraft with nonlinear disturbance observer. In Proceedings of the 2016 UKACC 11th International Conference on Control, Belfast, UK, 31 August–2 September 2016; pp. 1–6. [Google Scholar]
- Li, H.; Wu, Y.j.; Zuo, J.x. Sliding mode controller design for UAV based on backstepping control. In Proceedings of the 2016 IEEE Chinese Guidance, Navigation and Control Conference (CGNCC), Nanjing, China, 12–14 August 2016; pp. 1448–1453. [Google Scholar]
- Guo, Y.; Luo, L.; Bao, C. Design of a Fixed-Wing UAV Controller Combined Fuzzy Adaptive Method and Sliding Mode Control. Math. Probl. Eng. 2022, 2022, 13–21. [Google Scholar] [CrossRef]
- Elmokadem, T.; Zribi, M.; Youcef-Toumi, K. Terminal sliding mode control for the trajectory tracking of underactuated Autonomous Underwater Vehicles. Ocean. Eng. 2017, 129, 613–625. [Google Scholar] [CrossRef]
- Liu, S.; Niu, H.; Zhang, L.; Xu, C. Modified adaptive complementary sliding mode control for the longitudinal motion stabilization of the fully-submerged hydrofoil craft. Int. J. Nav. Archit. Ocean. Eng. 2019, 11, 584–596. [Google Scholar] [CrossRef]
- Liu, S.; Niu, H.; Zhang, L.; Xu, C. The Longitudinal Attitude Control of the Fully-Submerged Hydrofoil Vessel Based on the Disturbance Observer. In Proceedings of the 2018 37th Chinese Control Conference (CCC), Wuhan, China, 25–27 July 2018; pp. 397–401. [Google Scholar]
- Liu, S.; Niu, H.; Zhang, L.; Guo, X. Adaptive compound second-order terminal sliding mode control for the longitudinal attitude control of the fully submerged hydrofoil vessel. Adv. Mech. Eng. 2019, 11, 1687814019895637. [Google Scholar] [CrossRef] [Green Version]
- Bai, J.; Kim, Y. Control of the vertical motion of a hydrofoil vessel. Ships Offshore Struct. 2010, 5, 189–198. [Google Scholar] [CrossRef]
- Sanjeewa, S.D.; Parnichkun, M. Control of rotary double inverted pendulum system using LQR sliding surface based sliding mode controller. J. Control. Decis. 2022, 9, 89–101. [Google Scholar] [CrossRef]
- Chawla, I.; Singla, A. Real-Time Stabilization Control of a Rotary Inverted Pendulum Using LQR-Based Sliding Mode Controller. Arab. J. Sci. Eng. 2021, 46, 2589–2596. [Google Scholar] [CrossRef]
- Ali, H.; Abdulridha, A.J.; Khaleel, R.; Hussein, K. LQR/Sliding Mode Controller Design Using Particle Swarm Optimization for Crane System. Al-Nahrain J. Eng. Sci. 2020, 23, 45–50. [Google Scholar] [CrossRef]
- Jibril, M.; Tadese, M.; Hassen, N. Position Control of a Three Degree of Freedom Gyroscope using Optimal Control. Preprints 2020, 97, 5–9. [Google Scholar]
- Deng, Y.; Zhang, X.; Im, N.; Liang, C. Compound learning tracking control of a switched fully-submerged hydrofoil craft. Ocean. Eng. 2021, 219, 108260. [Google Scholar] [CrossRef]
- ELLSWORTH, W.M. US Navy Hydrofoil Craft. J. Hydronautics 2012, 1, 66–73. [Google Scholar] [CrossRef]
- Yasukawa, H.; Hirata, N.; Matsumoto, A.; Kuroiwa, R.; Mizokami, S. Evaluations of wave-induced steady forces and turning motion of a full hull ship in waves. J. Mar. Sci. Technol. 2019, 24, 1–15. [Google Scholar] [CrossRef]
- Hongli, C.; Jinghui, S.; Yuwei, C. The applied research of hydrofoil catamaran attitude estimation based on the fusion filtering. In Proceedings of the 2015 34th Chinese Control Conference (CCC), Hangzhou, China, 28–30 July 2015; pp. 1758–1763. [Google Scholar]
- Touw, M. Prediction of the Longitudinal Stability and Motions of a Hydrofoil Ship with a Suspension System between the Wings and the Hull Using a State-Space Model. Master’s Thesis, Delft University, Delft, The Netherlands, 2020. [Google Scholar]
- Lee, D.; Ko, S.; Park, J.; Kwon, Y.C.; Rhee, S.H.; Jeon, M.; Kim, T.H. An Experimental Analysis of Active Pitch Control for an Assault Amphibious Vehicle Considering Waterjet-Hydrofoil Interaction Effect. J. Mar. Sci. Eng. 2021, 9, 894. [Google Scholar] [CrossRef]
- Yu, W.; Li, J.; Yuan, J.; Ji, X. LQR controller design of active suspension based on genetic algorithm. In Proceedings of the 2021 IEEE 5th Information Technology, Networking, Electronic and Automation Control Conference (ITNEC), Xi’an, China, 15–17 October 2021; pp. 1056–1060. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Symbolic Representation | Value | Unit |
|---|---|---|---|
| Craft weight | m | 26,200 | kg |
| Craft speed | Ue | 35 | kn |
| Average immersion depth | Z | 1.52 | m |
| Front hydrofoil area | Afb | 6.08 | m2 |
| Rear hydrofoil area | Aff | 13.90 | m2 |
| Distance from front hydrofoil to center of gravity | Xb | 12.68 | m |
| Distance between two hydrofoils | Ls | 17.86 | m |
| Parameter | Value |
|---|---|
| Initial population size | 100 |
| Number of elite individuals | 10 |
| Cross offspring ratio | 0.75 |
| Lower limit | [0.1 0.1 0.1 0.1 0.1 0.1] |
| Upper limit | [1000 1000 1000 1000 500 500] |
| Evolutionary algebra | 30 |
| Fitness function deviation | 1e−100 |
| Control Method | hmax | E(h) | STD(h) | θmax | E(θ) | STD(θ) |
|---|---|---|---|---|---|---|
| Uncontrolled | 3.3372 | 0.0036 | 1.2489 | 12.1330 | 0.0049 | 4.0937 |
| LQR | 0.8865 | −0.0064 | 0.3535 | 4.6508 | 0.0236 | 1.8429 |
| LQRY | 0.4801 | −0.0035 | 0.1930 | 2.1788 | 0.0113 | 0.8784 |
| Wave Height | Control Method | hmax | E(h) | STD(h) | θmax | E(θ) | STD(θ) |
|---|---|---|---|---|---|---|---|
| 1.5 m | LQRY | 0.2625 | 1.9601 × 10−5 | 0.0814 | 1.6591 | 3.5457 × 10−4 | 0.5508 |
| SMC | 0.2219 | −0.0057 | 0.0611 | 1.3888 | 0.0355 | 0.3792 | |
| LQRY-SMC | 0.1429 | −3.2011 × 10−4 | 0.0438 | 0.4515 | 9.4201 × 10−4 | 0.1386 | |
| 2 m | LQRY | 0.4552 | 8.6007 × 10−4 | 0.1221 | 2.4925 | −8.4116 × 10−4 | 0.7204 |
| SMC | 0.4506 | 0.0538 | 0.0949 | 2.8112 | −0.3344 | 0.5907 | |
| LQRY-SMC | 0.2453 | 9.2481 × 10−4 | 0.0644 | 0.9975 | −0.0019 | 0.2132 | |
| 3 m | LQRY | 0.4801 | −0.0035 | 0.1930 | 3.3249 | 0.0113 | 0.8784 |
| SMC | 0.5864 | −0.0242 | 0.1673 | 3.8698 | 0.1399 | 1.0303 | |
| LQRY-SMC | 0.2462 | −0.0026 | 0.0942 | 1.4875 | 0.0053 | 0.3173 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, H.; Fu, Y.; Li, B. Study of the LQRY-SMC Control Method for the Longitudinal Motion of Fully Submerged Hydrofoil Crafts. J. Mar. Sci. Eng. 2022, 10, 1390. https://doi.org/10.3390/jmse10101390
Liu H, Fu Y, Li B. Study of the LQRY-SMC Control Method for the Longitudinal Motion of Fully Submerged Hydrofoil Crafts. Journal of Marine Science and Engineering. 2022; 10(10):1390. https://doi.org/10.3390/jmse10101390
Chicago/Turabian StyleLiu, Hongdan, Yunxing Fu, and Bing Li. 2022. "Study of the LQRY-SMC Control Method for the Longitudinal Motion of Fully Submerged Hydrofoil Crafts" Journal of Marine Science and Engineering 10, no. 10: 1390. https://doi.org/10.3390/jmse10101390
APA StyleLiu, H., Fu, Y., & Li, B. (2022). Study of the LQRY-SMC Control Method for the Longitudinal Motion of Fully Submerged Hydrofoil Crafts. Journal of Marine Science and Engineering, 10(10), 1390. https://doi.org/10.3390/jmse10101390