
A Low Cost Oscillating Membrane for Underwater Applications at Low Reynolds Numbers




Abstract
:1. Introduction
2. Materials and Methods
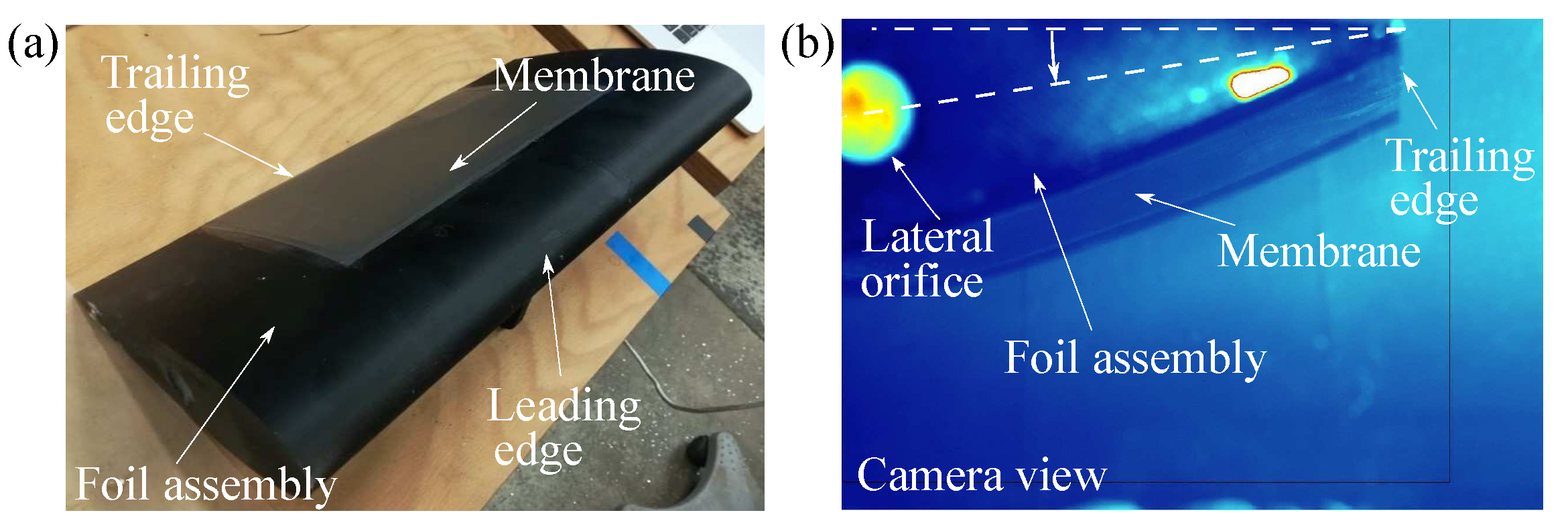
2.1. The Foil Assembly
2.2. The Membrane
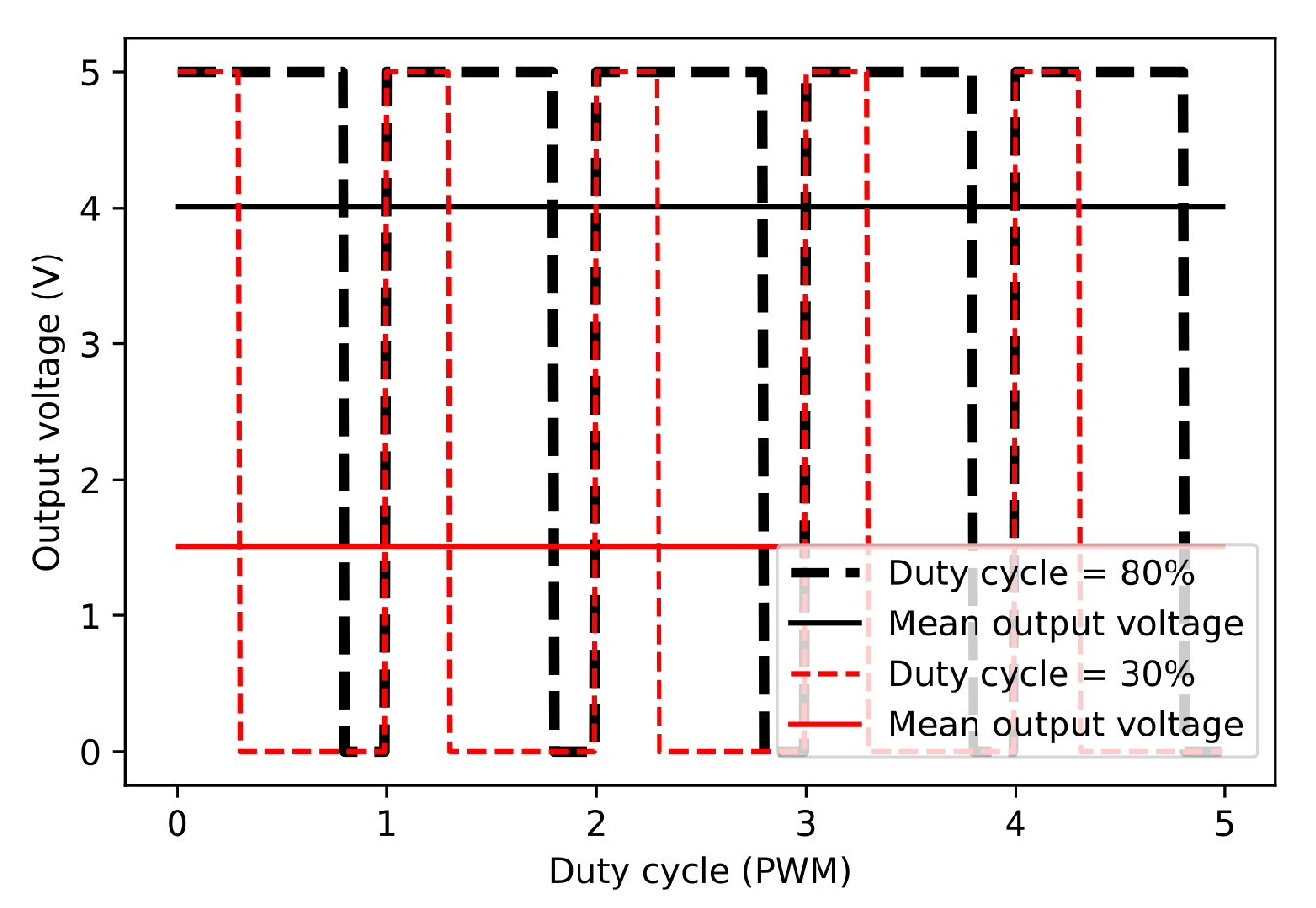
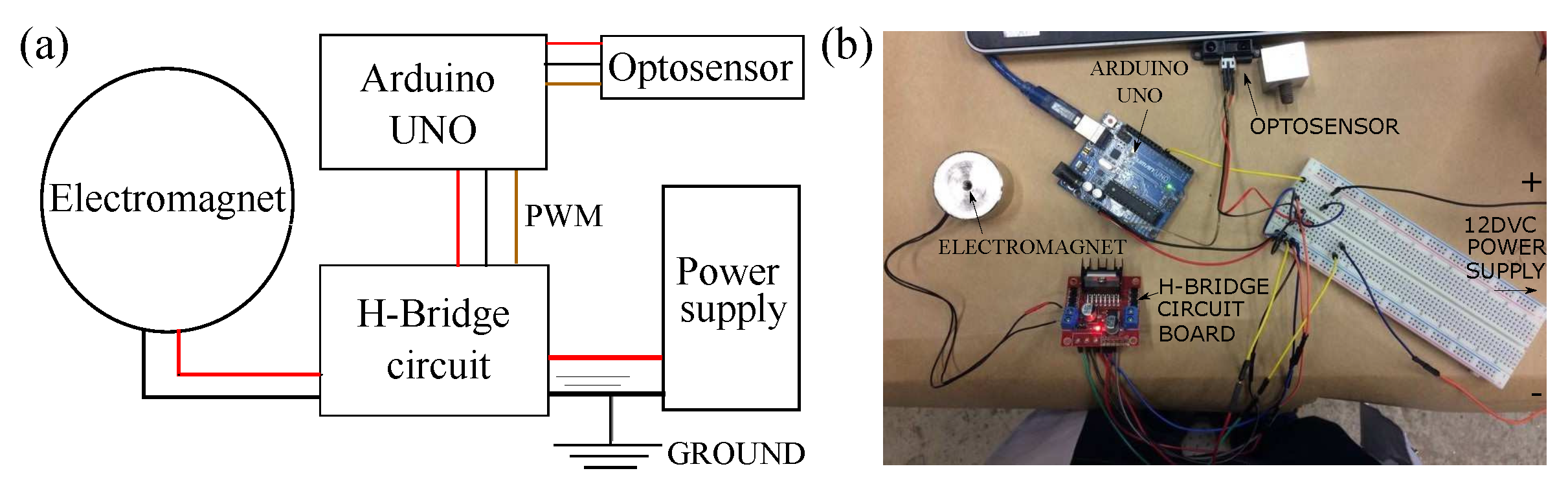
2.3. Membrane Control and Deformation Measurement
2.4. Water Proofing
2.5. Cost, Safety and Power Requirements
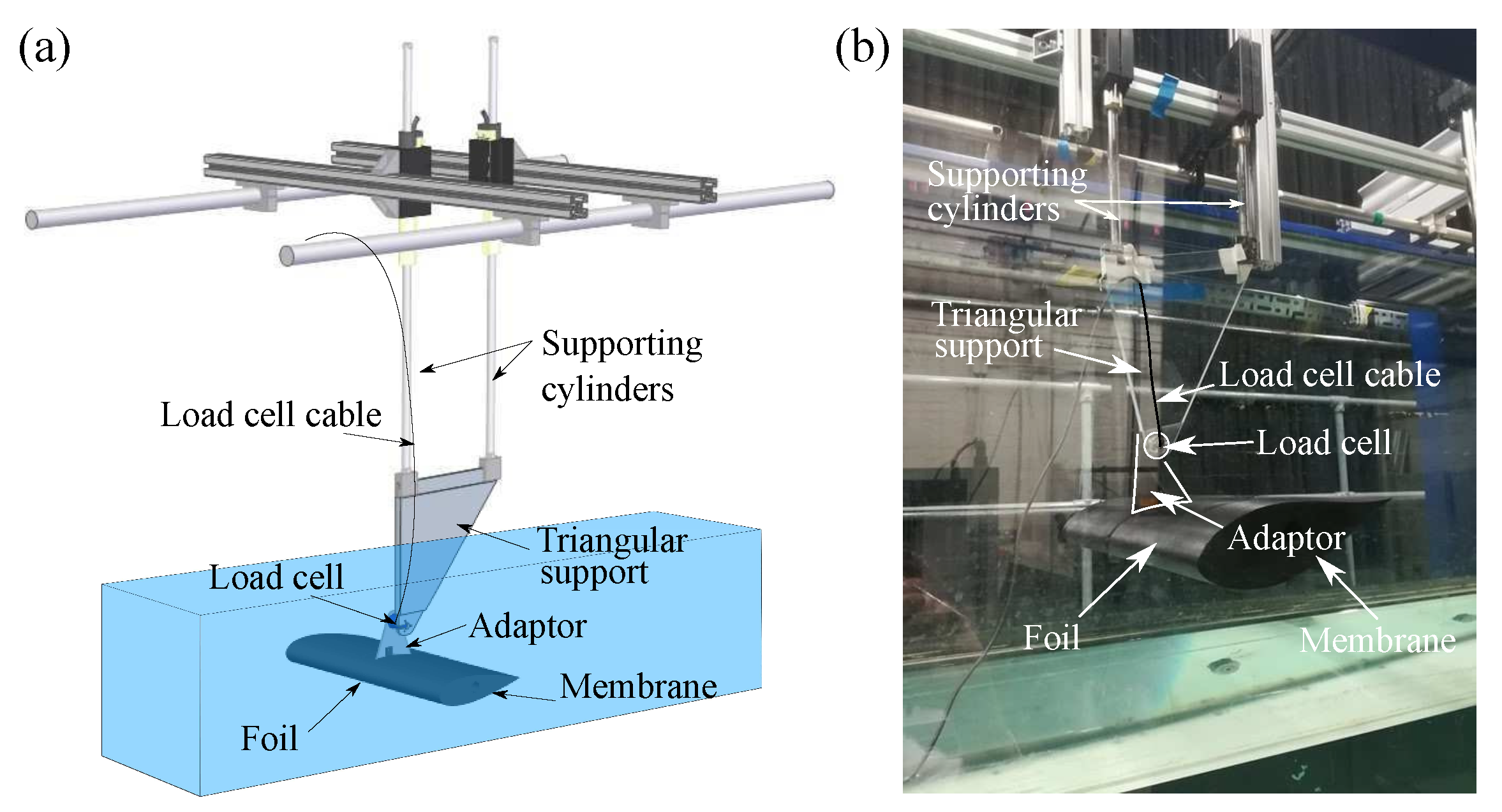
2.6. The Experimental Setup
2.7. Testing Conditions
2.8. Error Quantification
3. Results
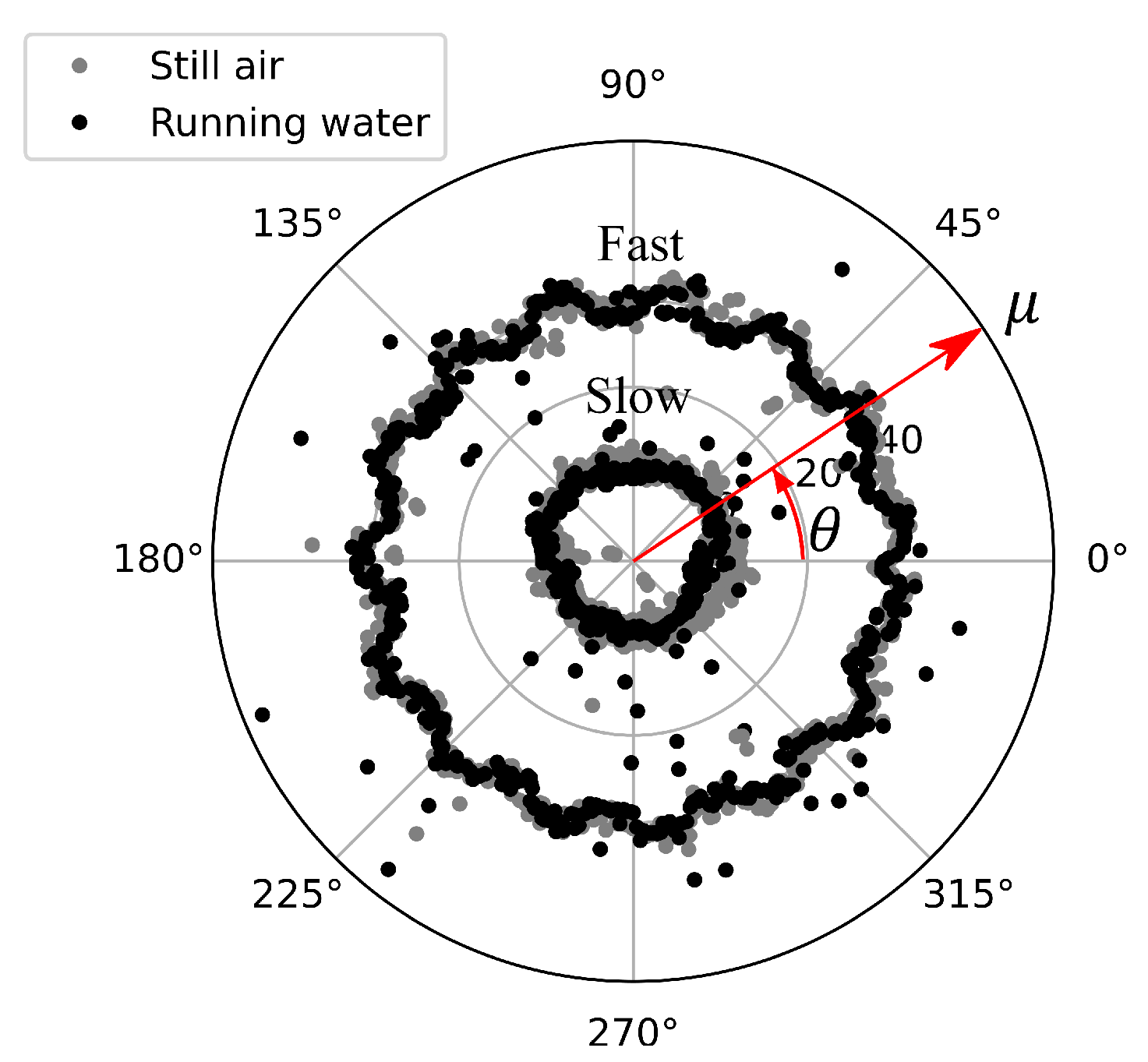
3.1. Membrane Displacement Characterisation
3.2. Frequency Analysis
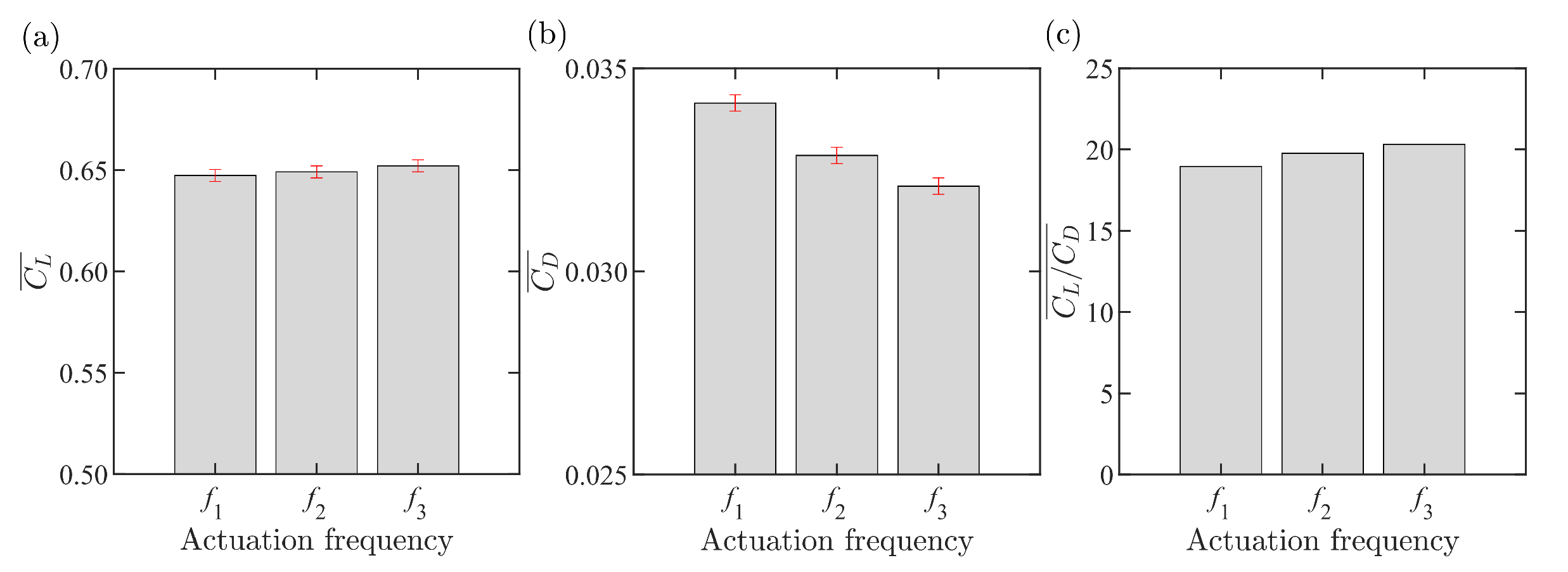
3.3. Time Averaged Lift Coefficient, Drag Coefficient and Lift to Drag Ratio
3.4. Potential Applications of Technology
3.4.1. Marine Renewable Energy Harvesters
3.4.2. Boat Appendages
3.4.3. Autonomous Underwater Vehicles (AUVs)
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Chang, P.K. Separation of Flow; Pergamon Press: London, UK, 1970. [Google Scholar]
- Carter, J.E.; Vatsa, V.N. Analysis of airfoil leading edge separation bubbles. AIAA J. 1984, 22, 1697–1704. [Google Scholar]
- O’Meara, M.; Mueller, T.J. Laminar separation bubble characteristics on an airfoil at low Reynolds numbers. AIAA J. 1987, 25, 1033–1041. [Google Scholar] [CrossRef]
- Stevenson, J.P.J.; Nolan, K.P.; Walsh, E.J. Particle image velocimetry measurements of induced separation at the leading edge of a plate. J. Fluid Mech. 2016, 804, 278–297. [Google Scholar] [CrossRef] [Green Version]
- Smith, J.; Pisetta, G.; Viola, I.M. The scales of the leading- edge separation bubble. Phys. Fluids 2021, 33, 045101. [Google Scholar] [CrossRef]
- Arredondo-Galeana, A.; Viola, I.M. The leading-edge vortex of yacht sails. Ocean. Eng. 2018, 159, 552–562. [Google Scholar] [CrossRef] [Green Version]
- Arredondo-Galeana, A.; Viola, I.M. Force generation mechanisms of downwind sails. In Proceedings of the 7th High Performance Yacht Design Conference, Auckland, New Zealand, 11–12 March 2021. [Google Scholar]
- Sørensen, J.N. Aerodynamic Aspects of Wind Energy Conversion. Annu. Rev. Fluid Mech. 2011, 43, 427–448. [Google Scholar] [CrossRef] [Green Version]
- Rezaeiha, A.; Montazeri, H.; Blocken, B. Characterization of aerodynamic performance of vertical axis wind turbines: Impact of operational parameters. Energy Convers. Manag. 2018, 169, 45–77. [Google Scholar] [CrossRef]
- Abbot, I.H.; Doenhoff, A.E. Theory of Wing Sections: Including a Summary of Airfoil Data; Dover Publications, Inc.: New York, NY, USA, 1959. [Google Scholar]
- Mueller, T.J.; DeLaurier, J.D. Aerodynamics of small vehicles. Annu. Rev. Fluid Mech. 2003, 35, 89–111. [Google Scholar] [CrossRef]
- Bahaj, A.; Molland, A.; Chaplin, J.; Batten, W. Power and thrust measurements of marine current turbines under various hydrodynamic flow conditions in a cavitation tunnel and a towing tank. Renew. Energy 2007, 32, 407–426. [Google Scholar] [CrossRef]
- Scarlett, G.T.; Sellar, B.; van den Bremer, T.; Viola, I.M. Unsteady hydrodynamics of a full-scale tidal turbine operating in large wave conditions. Renew. Energy 2019, 143, 199–213. [Google Scholar] [CrossRef]
- Smyth, A.; Young, A. Three-Dimensional Unsteady Hydrodynamic Modelling of Tidal Turbines. In Proceedings of the 13th European Wave and Tidal Energy Conference (EWTEC), Napoli, Italy, 1–6 September 2019. [Google Scholar] [CrossRef]
- Arredondo-Galeana, A.; Shi, W.; Olbert, G.; Scharf, M.; Ermakov, A.; Ringwood, J.; Brennan, F. A methodology for the structural design of LiftWEC: A wave-bladed cyclorotor. In Proceedings of the 14th European Wave and Tidal Energy Conference, Plymouth, UK, 5–9 September 2021. [Google Scholar]
- Lamont-Kane, P.; Folley, M.; Frost, C.; Whittaker, T. Preliminary Investigations into the Hydrodynamic Performance of Lift-Based Wave Energy Converters. In Proceedings of the 14th European Wave and Tidal Energy Conference, Plymouth, UK, 5–9 September 2021. [Google Scholar]
- Ermakov, A.; Ringwood, J.V. A control-orientated analytical model for a cyclorotor wave energy device with N hydrofoils. J. Ocean. Eng. Mar. Energy 2021, 7, 201–210. [Google Scholar] [CrossRef]
- Xiao, Q.; Zhu, Q. A review on flow energy harvesters based on flapping foils. J. Fluids Struct. 2014, 46, 174–191. [Google Scholar] [CrossRef]
- Kerwin, J.E. Marine Propellers. Annu. Rev. Fluid Mech. 1986, 18, 367–403. [Google Scholar] [CrossRef]
- Carlton, J.S. Marine Propellers and Propulsion; Butterworth-Heinemann: Oxford, UK, 2018. [Google Scholar]
- Stark, C.; Shi, W.; Atlar, M. A numerical investigation into the influence of bio-inspired leading-edge tubercles on the hydrodynamic performance of a benchmark ducted propeller. Ocean Eng. 2021, 237, 109593. [Google Scholar] [CrossRef]
- Jagadeesh, P.; Murali, K.; Idichandy, V.G. Experimental investigation of hydrodynamic force coefficients over AUV hull form. Ocean Eng. 2009, 36, 113–118. [Google Scholar] [CrossRef]
- Fish, F.E.; Lauder, G.V.; Mittal, R.; Techet, A.H.; Triantafyllou, M.S.; Walker, J.A.; Webb, P.W. Conceptual design for the construction of a biorobotic AUV based on biological hydrodynamics. In Proceedings of the 13th International Symposium on Unmanned Untethered Submersible Technology, Durham, NH, USA, 25 August 2003. [Google Scholar]
- Gad-el Hak, M. Flow Control: Passive, Active, and Reactive Flow Management; Cambridge University Press: Cambridge, UK, 2000. [Google Scholar]
- Hansen, K.L.; Kelso, R.M.; Dally, B.B. Performance Variations of Leading-Edge Tubercles for Distinct Airfoil Profiles. AIAA J. 2011, 49, 185–194. [Google Scholar] [CrossRef]
- Lin, J.C. Review of research on low-profile vortex generators to control boundary-layer separation. Prog. Aerosp. Sci. 2002, 38, 389–420. [Google Scholar] [CrossRef]
- Young, A.; Farman, J.; Miller, R. Load alleviation technology for extending life in tidal turbines. In Progress in Renewable Energies Offshore—Proceedings of 2nd International Conference on Renewable Energies Offshore, RENEW 2016, 1st ed.; Guedes Soares, C., Ed.; CRC Press: Lisbon, Portugal, 24–26 October 2016; pp. 521–530. [Google Scholar]
- Józsa, T.I.; Balaras, E.; Kashtalyan, M.; Borthwick, A.G.L.; Viola, I.M. Active and passive in-plane wall fluctuations in turbulent channel flows. J. Fluid Mech. 2019, 866, 689–720. [Google Scholar] [CrossRef] [Green Version]
- Józsa, T.I.; Balaras, E.; Kashtalyan, M.; Borthwick, A.G.L.; Maria Viola, I. On the friction drag reduction mechanism of streamwise wall fluctuations. Int. J. Heat Fluid Flow 2020, 86, 108686. [Google Scholar] [CrossRef]
- Tully, S.; Viola, I.M. Reducing the wave induced loading of tidal turbine blades through the use of a flexible blade. In Proceedings of the 16th International Symposium on Transport Phenomena and Dynamics of Rotating Machinery (ISROMAC 2016), Honolulu, Hawaii, USA, 10–15 April 2016. [Google Scholar]
- Arredondo-Galeana, A.; Young, A.M.; Smyth, A.S.; Viola, I.M. Unsteady load mitigation through a passive trailing-edge flap. J. Fluids Struct. 2021, 106, 103352. [Google Scholar] [CrossRef]
- Cattafesta, L.N.; Sheplak, M. Actuators for Active Flow Control. Annu. Rev. Fluid Mech. 2011, 43, 247–272. [Google Scholar] [CrossRef] [Green Version]
- Tuck, A.; Soria, J. Separation control on a NACA 0015 airfoil using a 2D micro ZNMF jet. Aircr. Eng. Aerosp. Technol. 2008, 80, 175–180. [Google Scholar] [CrossRef]
- Esmaeili Monir, H.; Tadjfar, M.; Bakhtian, A. Tangential synthetic jets for separation control. J. Fluids Struct. 2014, 45, 50–65. [Google Scholar] [CrossRef]
- Li, Y.; Qin, N. Airfoil gust load alleviation by circulation control. Aerosp. Sci. Technol. 2020, 98, 105622. [Google Scholar] [CrossRef]
- Li, Y.; Qin, N. Gust load alleviation on an aircraft wing by trailing edge Circulation Control. J. Fluids Struct. 2021, 107, 103407. [Google Scholar] [CrossRef]
- Corke, T.C.; Bowles, P.O.; He, C.; Matlis, E.H. Sensing and control of flow separation using plasma actuators. Philos. Trans. R. Soc. A Math. Phys. Eng. Sci. 2011, 369, 1459–1475. [Google Scholar] [CrossRef] [PubMed]
- Greenblatt, D.; Wygnanski, I.J. The control of flow separation by periodic excitation. Prog. Aerosp. Sci. 2000, 36, 487–545. [Google Scholar] [CrossRef]
- Munday, D.; Jacob, J. Active Control of Separation on a Wing with Oscillating Camber. J. Aircr. 2002, 39, 187–189. [Google Scholar] [CrossRef] [Green Version]
- Jones, G.; Santer, M.; Debiasi, M.; Papadakis, G. Control of flow separation around an airfoil at low Reynolds numbers using periodic surface morphing. J. Fluids Struct. 2018, 76, 536–557. [Google Scholar] [CrossRef] [Green Version]
- Olivett, A.; Corrao, P.; Karami, M.A. Flow control and separation delay in morphing wing aircraft using traveling wave actuation. Smart Mater. Struct. 2021, 30, 025028. [Google Scholar] [CrossRef]
- Li, T.; Li, G.; Liang, Y.; Cheng, T.; Dai, J.; Yang, X.; Liu, B.; Zeng, Z.; Huang, Z.; Luo, Y.; et al. Fast-moving soft electronic fish. Sci. Adv. 2017, 3, e1602045. [Google Scholar] [CrossRef] [Green Version]
- Shintake, J.; Cacucciolo, V.; Shea, H.; Floreano, D. Soft Biomimetic Fish Robot Made of Dielectric Elastomer Actuators. Soft Robot. 2018, 5, 466–474. [Google Scholar] [CrossRef] [Green Version]
- Feero, M.A.; Goodfellow, S.D.; Lavoie, P.; Sullivan, P.E. Flow Reattachment Using Synthetic Jet Actuation on a Low-Reynolds-Number Airfoil. AIAA J. 2015, 53, 2005–2014. [Google Scholar] [CrossRef]
- Arredondo-Galeana, A. A Study of the Vortex Flows of Downwind Sails. Ph.D. Thesis, University of Edinburgh, Edinburgh, UK, 2019. [Google Scholar]
- Yarusevych, S.; Sullivan, P.E.; Kawall, J.G. On vortex shedding from an airfoil in low-Reynolds-number flows. J. Fluid Mech. 2009, 632, 245–271. [Google Scholar] [CrossRef]
- Hoerner, S.; Abbaszadeh, S.; Cleynen, O.; Bonamy, C.; Maître, T.; Thévenin, D. Passive flow control mechanisms with bioinspired flexible blades in cross-flow tidal turbines. Exp. Fluids 2021, 62, 104. [Google Scholar] [CrossRef]
- Scarlett, G.T.; Viola, I.M. Unsteady hydrodynamics of tidal turbine blades. Renew. Energy 2020, 146, 843–855. [Google Scholar] [CrossRef]
- Siegel, S.; Jeans, T.; McLaughlin, T. Deep ocean wave energy conversion using a cycloidal turbine. Appl. Ocean Res. 2011, 33, 110–119. [Google Scholar] [CrossRef] [Green Version]
- Cao, Y.; Liu, A.; Yu, X.; Liu, Z.; Tang, X.; Wang, S. Experimental tests and CFD simulations of a horizontal wave flow turbine under the joint waves and currents. Ocean Eng. 2021, 237, 109480. [Google Scholar] [CrossRef]
- Tupper, E.C. Introduction to Naval Architecture, 5th ed.; Butterworth-Heinemann: Oxford, UK, 2013. [Google Scholar]
- Troll, M.M.F.; Shi, W.; Stark, C. The influence of leading-edge tubercles on wake flow dynamics of a marine rudder. In Proceedings of the 9th International Conference on Computational Methods in Marine Engineering, Edinburgh, UK (Virtual Conference), 2–4 June 2021. [Google Scholar]
- Stevenson, P.; Furlong, M.; Dormer, D. AUV shapes—Combining the Practical and Hydrodynamic Considerations. In Proceedings of the OCEANS 2007—Europe, Aberdeen, UK, 18–21 June 2007; pp. 1–6. [Google Scholar] [CrossRef]
- Weydahl, H.; Gilljam, M.; Lian, T.; Johannessen, T.C.; Holm, S.I.; Øistein Hasvold, J. Fuel cell systems for long-endurance autonomous underwater vehicles—challenges and benefits. Int. J. Hydrog. Energy 2020, 45, 5543–5553. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Component | Cost per Unit | Quantity |
|---|---|---|
| Magnetic membrane | £42.90 | 1 |
| Electromagnet | £8.40 | 2 |
| Optosensor | £7.83 | 1 |
| Arduino UNO | £20.40 | 1 |
| H-bridge motor driver | £6.99 | 1 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Arredondo-Galeana, A.; Kiprakis, A.; Viola, I.M. A Low Cost Oscillating Membrane for Underwater Applications at Low Reynolds Numbers. J. Mar. Sci. Eng. 2022, 10, 77. https://doi.org/10.3390/jmse10010077
Arredondo-Galeana A, Kiprakis A, Viola IM. A Low Cost Oscillating Membrane for Underwater Applications at Low Reynolds Numbers. Journal of Marine Science and Engineering. 2022; 10(1):77. https://doi.org/10.3390/jmse10010077
Chicago/Turabian StyleArredondo-Galeana, Abel, Aristides Kiprakis, and Ignazio Maria Viola. 2022. "A Low Cost Oscillating Membrane for Underwater Applications at Low Reynolds Numbers" Journal of Marine Science and Engineering 10, no. 1: 77. https://doi.org/10.3390/jmse10010077
APA StyleArredondo-Galeana, A., Kiprakis, A., & Viola, I. M. (2022). A Low Cost Oscillating Membrane for Underwater Applications at Low Reynolds Numbers. Journal of Marine Science and Engineering, 10(1), 77. https://doi.org/10.3390/jmse10010077