

Design and Experiment of Autonomous Shield-Cutting End-Effector for Dual-Zone Maize Field Weeding


Abstract
1. Introduction
2. Materials and Methods
2.1. Working Principle and Machine Structure
2.1.1. Working Principle
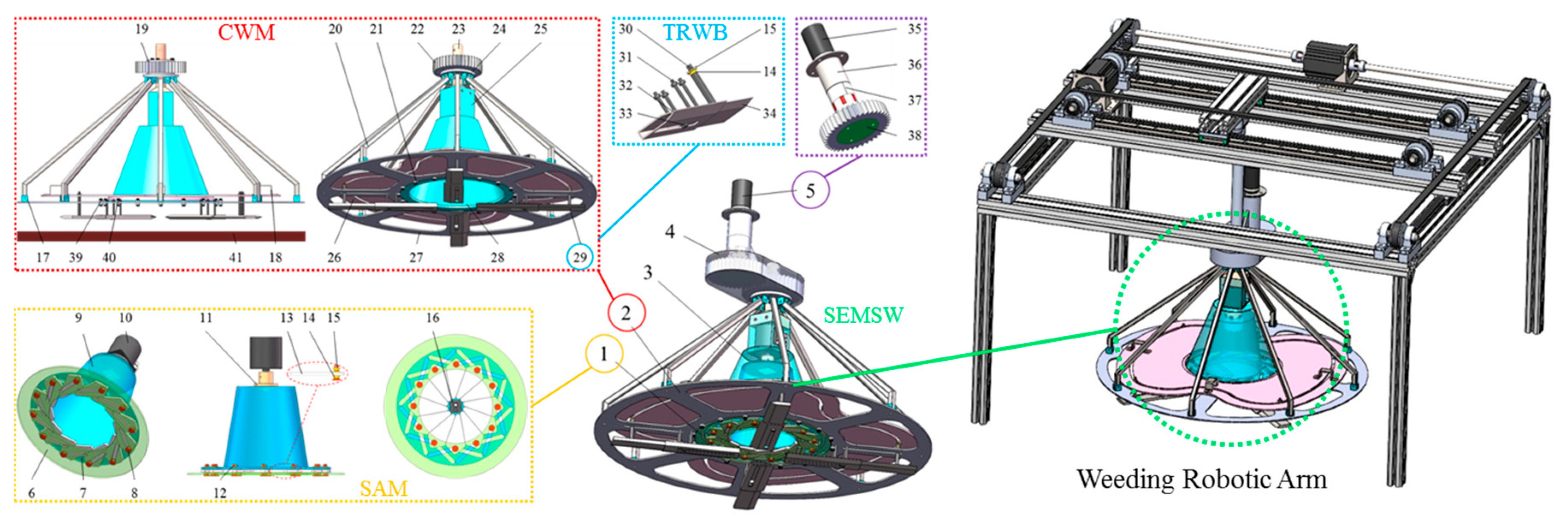
2.1.2. Structure of the SEMSW
2.2. Adaptive Sliding Mode Control of Weeding Robotic Arm
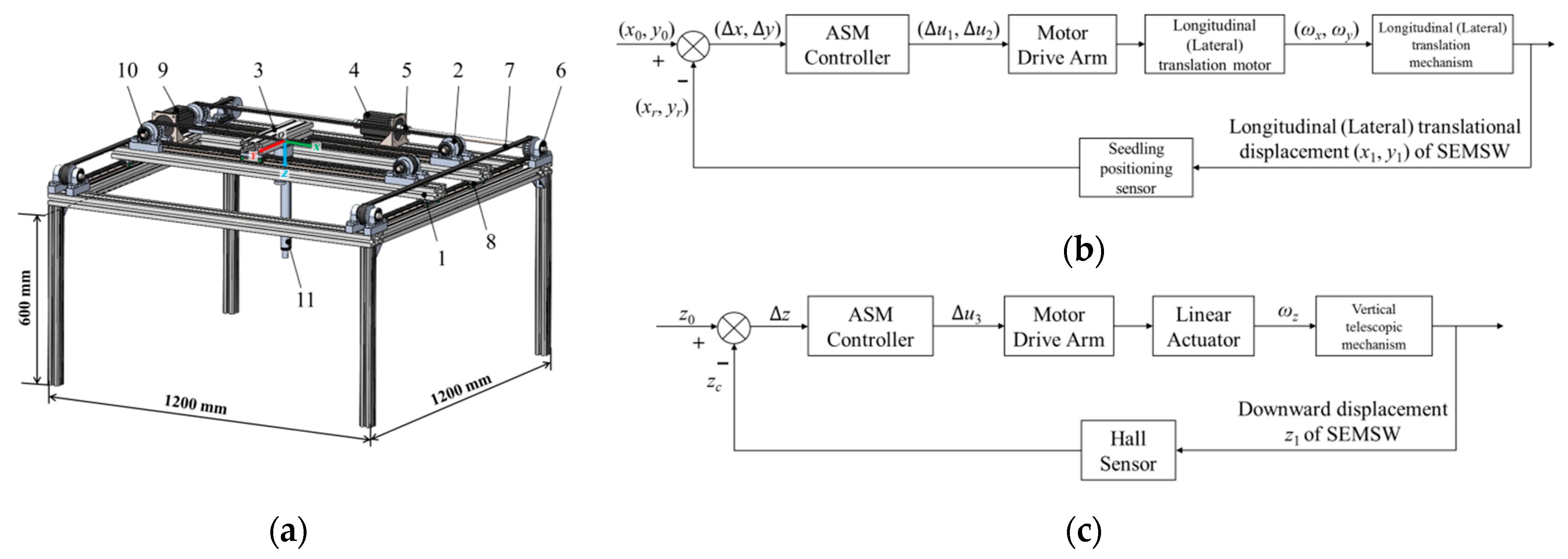
2.2.1. Control Process of Weeding Robotic Arm
2.2.2. Derivation of Kinematic and Dynamic Models
2.2.3. Problem Formulation
2.3. Dataset and Weed Detection
2.3.1. Dataset
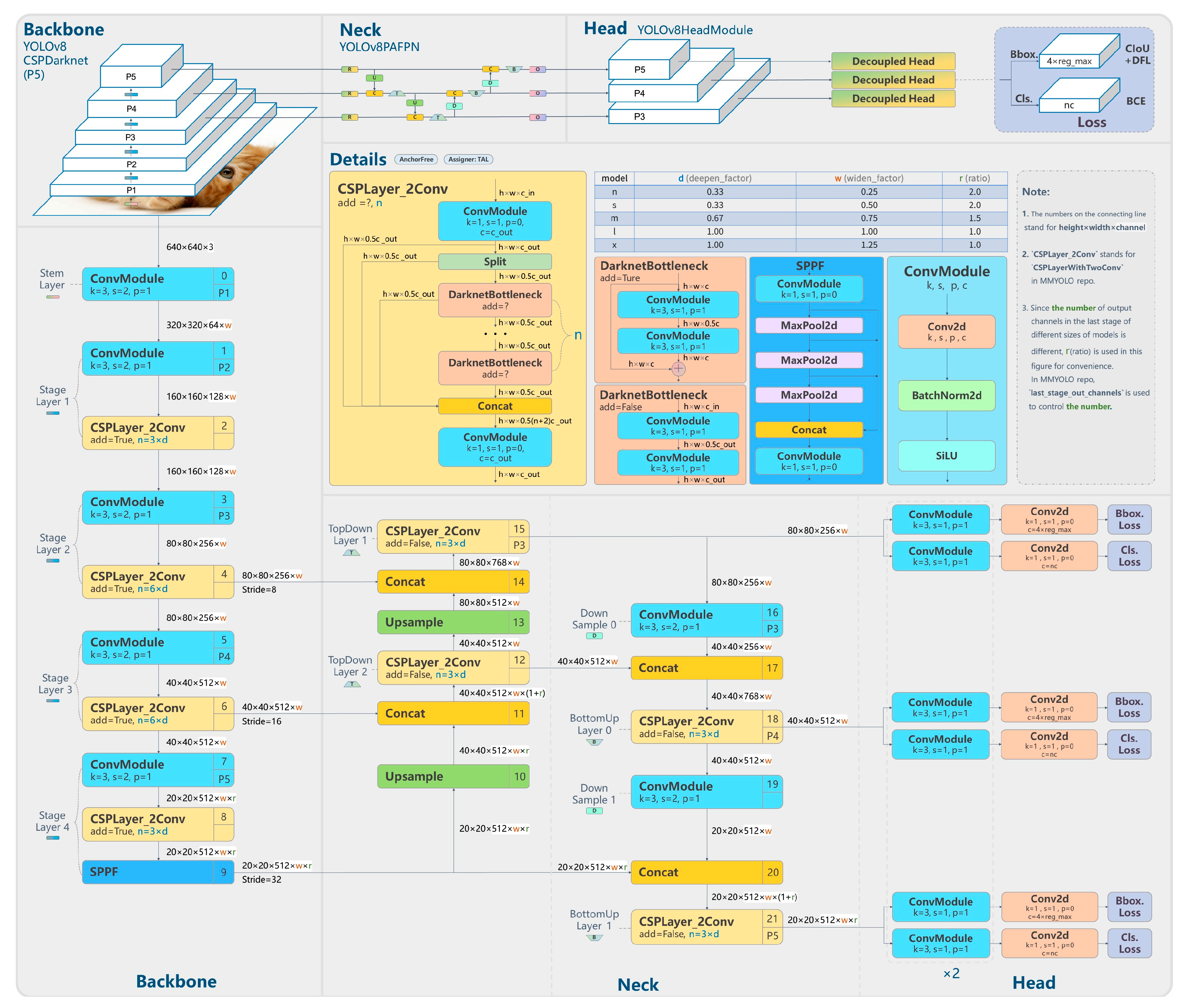
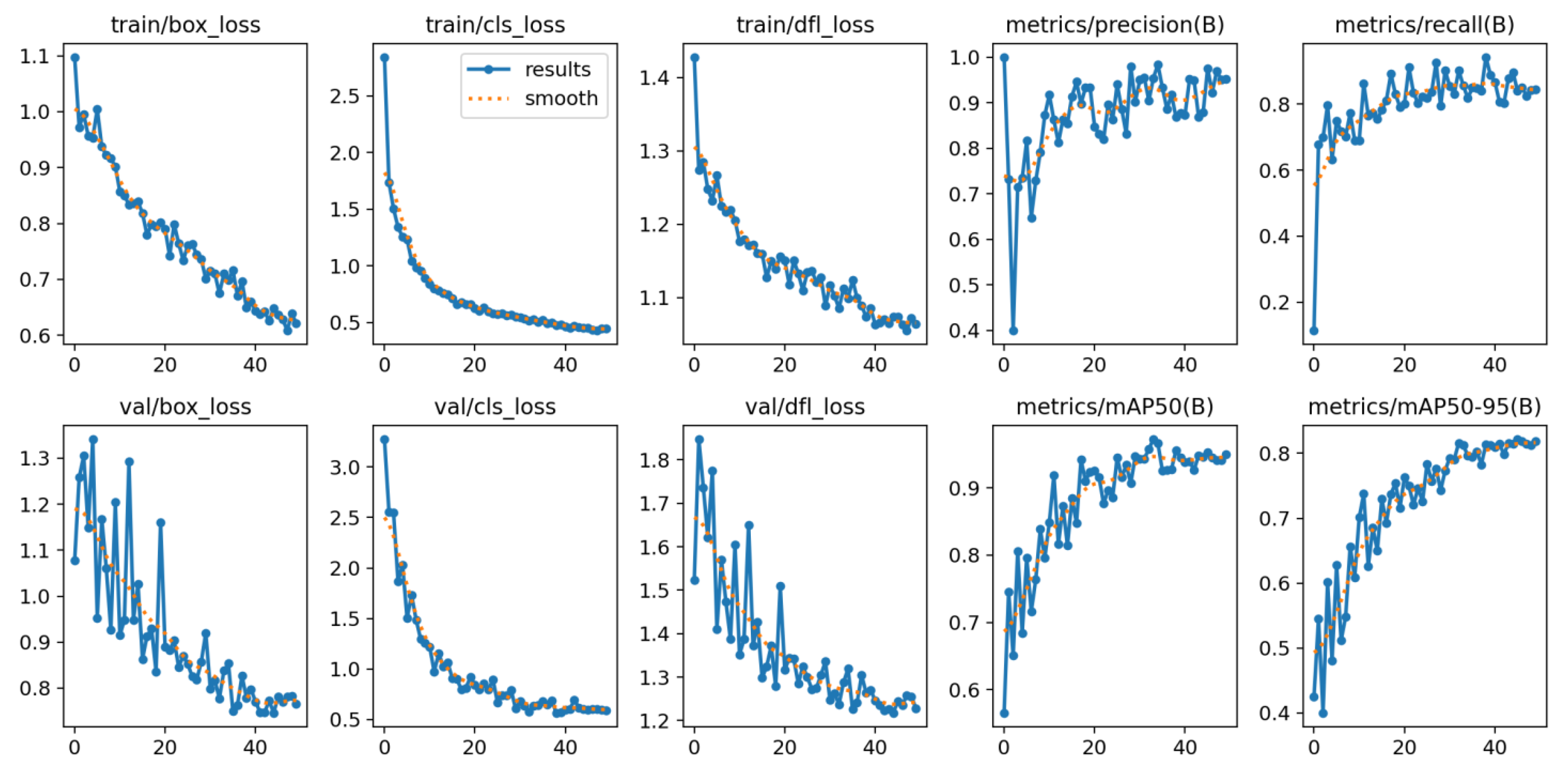
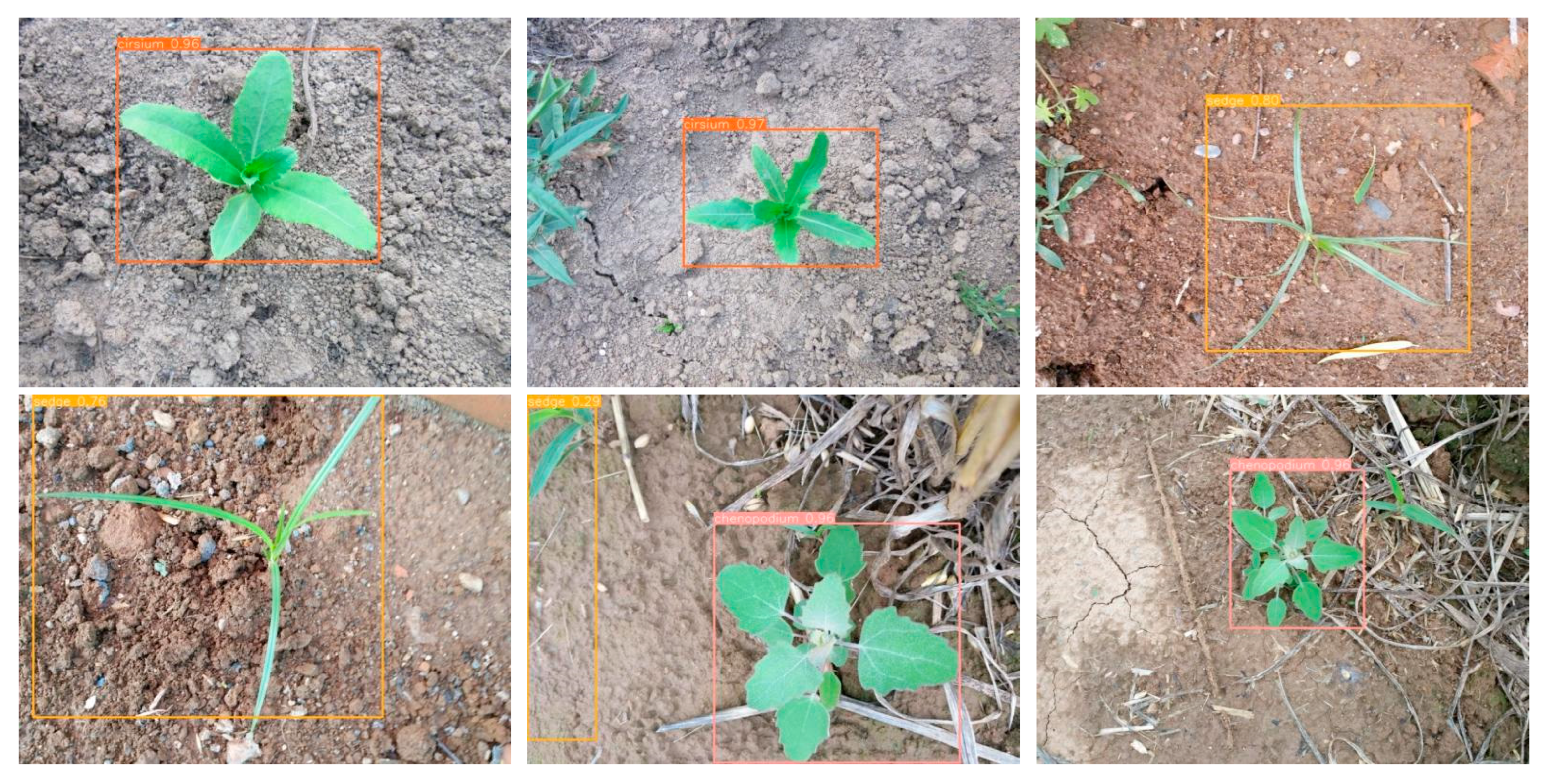
2.3.2. Weed Detection
3. Results and Discussion
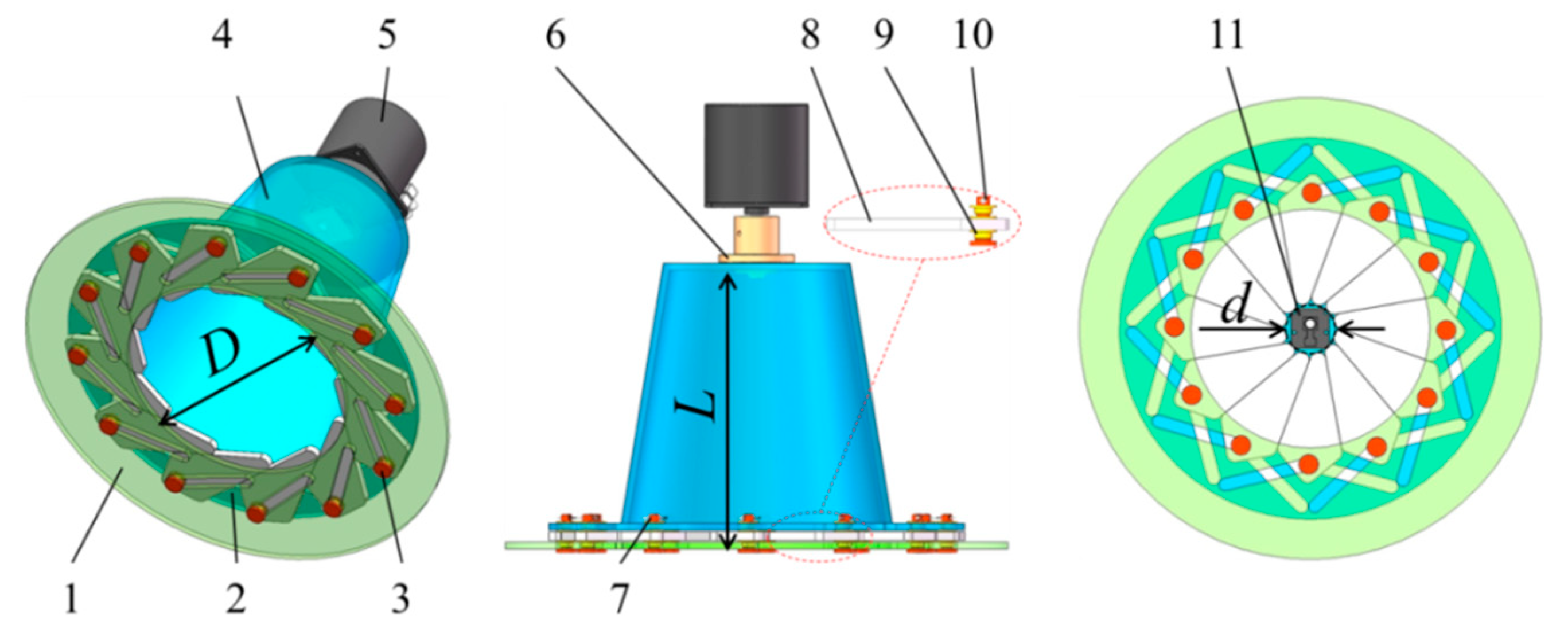
3.1. Parametric Design of SAM
3.1.1. Inner Diameter D of the Seedling-Shielding Disc
3.1.2. Minimum Inscribed-Circle Diameter d of the RCUs
3.1.3. Ground Clearance h of the SAM
3.1.4. Seedling-Shielding Height L
3.2. Parametric Design of CWM
3.2.1. Minimum Inscribed-Circle Diameter d1 of the TRWB
3.2.2. Contour Curve Design of the SWC
3.2.3. Dimensional Chain Design of the TRWB
3.3. Design of Adaptive Sliding Mode Controller
3.4. Crop Detection Test
3.4.1. Maize Seedling Image Segmentation
3.4.2. Environment of Weed Detection
3.4.3. Result of Weed Detection
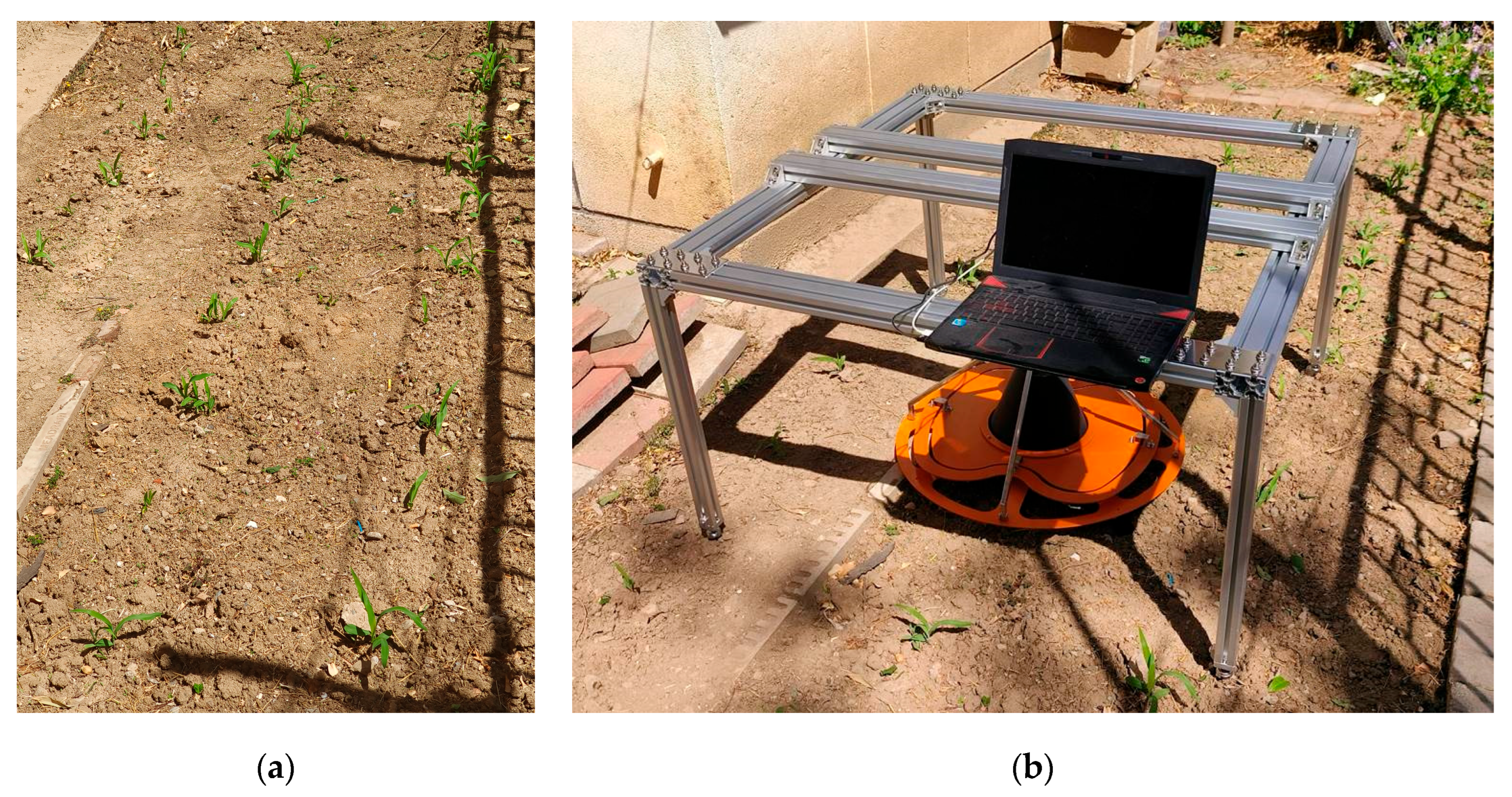
3.5. Field Validation Test
3.5.1. Test Conditions
3.5.2. Test Method and Results
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Nomenclature
| WRR/λ1 | Weed removal rate (%) | D | Inner diameter of the seedling-shielding disc (mm) |
| SDR/λ2 | Seedling damage rate (%) | d | Minimum inscribed-circle diameter of the RCUs (mm) |
| SEMSW | Shield-cutting end-effector for maize surrounding weeding | d1 | Minimum inscribed-circle diameter of the TRWB (mm) |
| SAM | Seedling-shielding anti-cutting mechanism | x1, y1, z1 | Coordinates of the weeding robotic arm in the spatial coordinate system |
| CWM | Contour-adaptive weeding mechanism | i | Synchronous transmission ratio between the linear actuator motor and the screw |
| TRWB | Two-stage retractable weeding blade | Lk | Height of the anti-cutting rotating shield (mm) |
| RCU | Retractable clamping unit | l1 | Length of the fixed blade body (mm) |
| SWC | Shape-following weeding cam | l2 | Length of the telescopic blade body (mm) |
| YOLOv8 | You only look once, version 8 | W1 | Minimum contraction distance of the TRWB (mm) |
| CSP | Cross-stage partial | W2 | Maximum stretching distance of the TRWB (mm) |
| PANet | Path aggregation network | Fz | Number of weeds before operation |
| L | Seedling-shielding height (mm) | Fs | Number of weeds remaining after operation |
| rm | Radius of the maize stalk (cm) | Ez | Total number of maize seedlings before operation |
| dm | Diameter of majority maize stalks (mm) | Es | Number of damaged maize seedlings after operation |
| h | Ground clearance of the SAM (mm) | ωx | Angular velocities of the lateral translation motor (rad/s) |
| hc | Gap between RCUs and disc (mm) | ωy | Angular velocities of longitudinal translation motor (rad/s) |
| hs | Height of the RCU (mm) | ωz | Angular velocities of the linear actuator motor (rad/s) |
| Ps | Plant-spacing of maize sowing (cm) | xd | Position command issued by lateral translation motor |
| Ls | Row-spacing of maize sowing (cm) | Mxa | Driving torque provided by lateral translation motor (N·m) |
| Tza | Torque of the linear actuator (N·m) | Mya | Driving torque by longitudinal translation motor (N·m) |
| ls | Lead of the screw (m) | fxa | Sliding friction resistance of lateral translation (N) |
| e | Lateral position tracking error | fya | Sliding friction resistance of longitudinal translation (N) |
| u1 | Control law equation | rxa | Force arm length of the sliding friction force fxa (m) |
| s1 | Sliding surface equation for the lateral positioning mechanism | rya | Force arm length of the sliding friction force fya (m) |
| Estimated value of θ1 | tf | Time required for the weeding robotic arm to move and align with the target point of the maize seedling (s) | |
| Δ1 | Aggregate uncertainty encompassing external disturbances and unmodeled dynamics | bg | Thickness of the seedling-shielding fixed disc (mm) |
| rw | Radius of the synchronous pulley (m) | J1/θ1, J2, J3 | Moments of inertia of the lateral translation mechanism, longitudinal translation mechanism, and vertical telescopic mechanism during motion, respectively (kg·m2) |
References
- Wang, A.; Zhang, W.; Wei, X. A review on weed detection using ground-based machine vision and image processing techniques. Comput. Electron. Agric. 2019, 158, 226–240. [Google Scholar] [CrossRef]
- Hamuda, E.; Glavin, M.; Jones, E. A survey of image processing techniques for plant extraction and segmentation in the field. Comput. Electron. Agric. 2016, 125, 184–199. [Google Scholar] [CrossRef]
- Zhang, X.; Wang, Q.; Wang, X.; Li, H.; He, J.; Lu, C.; Yang, Y.; Jiang, S. Automated detection of Crop-Row lines and measurement of maize width for boom spraying. Comput. Electron. Agric. 2023, 215, 108406. [Google Scholar] [CrossRef]
- Wang, X.; Zeng, S.; Luo, J.; Wang, S.; Luo, H. Species and Infestation Level of Weeds in Maize Fields of Bijie Mountain Locality. Weed Sci. 2024, 42, 17–30. [Google Scholar] [CrossRef]
- Oerke, E.C. Crop losses to pests. J. Agric. Sci. 2005, 144, 31–43. [Google Scholar] [CrossRef]
- Zhao, C. Prospect of Agricultural Robot. China Rural. Sci. Technol. 2019, 20–21. [Google Scholar]
- Zhao, C. Current situations and prospects of smart agriculture. J. South China Agric. University 2021, 42, 1–7. [Google Scholar] [CrossRef]
- EC-Weeder Intelligent Weeding Machine. Available online: https://www.lemken.cn/Proinfo.aspx?id=154 (accessed on 1 January 2025).
- Liu, G.; Sun, S.; Cheng, X.; Xu, J. Research and Design of 3ZS-2 Type Plowing Weeding Machine. J. Agric. Mech. Res. 1999, 2, 49–50 and 119. [Google Scholar]
- Li, N.; Chen, Z.; Zhu, C.; Zhang, C.; Sun, Z.; Li, W. System Design and Experiment of Electric Driven Weeding Robot. Trans. Chin. Soc. Agric. Mach. 2016, 47, 15–20+69. [Google Scholar] [CrossRef]
- Chen, Z.; Li, N.; Sun, Z.; Li, T.; Zhang, C.; Li, W. Optimization and experiment of intra-row brush weeding manipulator based on planetary gear train. Trans. Chin. Soc. Agric. Mach. 2015, 46, 94–99. [Google Scholar] [CrossRef]
- Gobor, Z.; Lammers, P.; Martinov, M. Development of a mechatronic intra-row weeding system with rotational hoeing tools: Theoretical approach and simulation. Comput. Electron. Agric. 2013, 98, 166–174. [Google Scholar] [CrossRef]
- Nørremark, M.; Griepentrog, H.W.; Nielsen, J.; Søgaard, H.T. Evaluation of an autonomous GPS-based system for intra-row weed control by assessing the tilled area. Precis. Agric. 2011, 13, 149–162. [Google Scholar] [CrossRef]
- Nørremark, M.; Griepentrog, H.W.; Nielsen, J.; Søgaard, H.T. The development and assessment of the accuracy of an autonomous GPS-based system for intra-row mechanical weed control in row crops. Biosyst. Eng. 2008, 101, 396–410. [Google Scholar] [CrossRef]
- Pérez-Ruíz, M.; Slaughter, D.; Fathallah, F.; Gliever, C.; Miller, B. Co-robotic intra-row weed control system. Biosyst. Eng. 2014, 126, 45–55. [Google Scholar] [CrossRef]
- Hou, X.; Chen, Y.; Guo, W. Machine vision-based navigation for a weeding robot. Trans. Chin. Soc. Agric. Mach. 2008, 39, 106–108. [Google Scholar]
- Guo, W.; Chen, Y. Fuzzy control based autonomous navigation for a weeding robot. Robot 2010, 32, 204–209. [Google Scholar] [CrossRef]
- Jia, H.; Li, S.; Wang, G.; Liu, H. Design and experiment of seedling avoidable weeding control device for intertillage maize (Zea Mays L.). Trans. Chin. Soc. Agric. Eng. 2018, 34, 15–22. [Google Scholar] [CrossRef]
- Slaughter, D.; Chen, P.; Curley, R. Vision guided precision cultivation. Precis. Agric. 1999, 1, 199–216. [Google Scholar] [CrossRef]
- Slaughter, D.; Giles, D.; Downey, D. Autonomous robotic weed control systems: A review. Comput. Electron. Agric. 2008, 61, 63–78. [Google Scholar] [CrossRef]
- Pantazi, X.; Moshou, D.; Bravo, C. Active learning system for weed species recognition based on hyperspectral sensing. Biosyst. Eng. 2016, 146, 193–202. [Google Scholar] [CrossRef]
- Sa, I.; Chen, Z.; Popović, M.; Khanna, R.; Liebisch, F.; Nieto, J.; Siegwart, R. weedNet: Dense Semantic Weed Classification Using Multispectral Images and MAV for Smart Farming. IEEE Robot. Autom. Lett. 2017, 3, 588–595. [Google Scholar] [CrossRef]
- Dyrmann, M.; Jørgensen, R.; Midtiby, H. RoboWeedSupport-Detection of weed locations in leaf occluded cereal crops using a fully convolutional neural network. Adv. Anim. Biosci. 2017, 8, 842–847. [Google Scholar] [CrossRef]
- Weed-Datasets of Zhangchuanyin. Available online: https://github.com/zhangchuanyin/weed-datasets (accessed on 1 May 2025).
- Jia, Z.; Zhang, M.; Yuan, C.; Liu, Q.; Liu, H.; Qiu, X.; Zhao, W.; Shi, J. ADL-YOLOv8: A Field Crop Weed Detection Model Based on Improved YOLOv8. Agronomy 2024, 14, 2355. [Google Scholar] [CrossRef]
- Liao, Y.; Li, C.; Liao, Q.; Wang, L. Research progress of seed guiding technology and device of planter. Trans. Chin. Soc. Agric. Mach. 2020, 51, 1–14. [Google Scholar] [CrossRef]
- Wang, Q.; Cao, X.; Wang, C.; Li, H.; He, J.; Lu, C. Research Progress of No/Minimum Tillage Corn Seeding Technology and Machine in Northeast Black Land of China. Trans. Chin. Soc. Agric. Mach. 2021, 52, 1–15. [Google Scholar] [CrossRef]
- Cao, X.; Wang, Q.; Li, H.; He, J.; Lu, C. Design and experiment of active rotating collective straw-cleaner. Trans. Chin. Soc. Agric. Eng. 2021, 37, 26–34. [Google Scholar] [CrossRef]
- Cao, X.; Wang, Q.; Li, H.; He, J.; Lu, C. Combined row cleaners research with side cutter and stubble clean disk of corn no-till seeder. Trans. Chin. Soc. Agric. Mach. 2021, 52, 36–44. [Google Scholar] [CrossRef]
- Transportation Machinery Design and Selection Manual Committee. Transport Machinery Design and Selection Manual, the Next Volume; Chemical Industry Press: Shanghai, China, 1999. [Google Scholar]
- Marcos-Andrade, D.; Beltran-Carbajal, F.; Rivas-Cambero, I.; Yañez-Badillo, H.; Favela-Contreras, A.; Rosas-Caro, J.C. Sliding Mode Speed Control in Synchronous Motors for Agriculture Machinery: A Chattering Suppression Approach. Agriculture 2024, 14, 737. [Google Scholar] [CrossRef]
- Peña-Fernández, A.; Colón-Reynoso, M.A.; Mazuela, P. Geometric Analysis of Greenhouse Roofs for Energy Efficiency Optimization and Condensation Drip Reduction. Agriculture 2024, 14, 216. [Google Scholar] [CrossRef]
- Lasalle, J.; Lefschetz, S. Stability by Lyapunov’s Direct Method; Academic Press: New York, NY, USA, 1961. [Google Scholar]
- Chu, B.; Shao, R.; Fang, Y.; Lu, Y. Weed Detection Method Based on Improved YOLOv8 with Neck-Slim. In Proceedings of the 2023 China Automation Congress (CAC), Chongqing, China, 17–19 November 2023; pp. 9378–9382. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Metrics | Values |
|---|---|
| Precision | 0.951 |
| Recall | 0.844 |
| mAP50 | 0.950 |
| mAP50-95 | 0.819 |
| Items | Parameters | Values |
|---|---|---|
| Maize seedlings | Average plant height/mm | 203 |
| Average stem diameter/mm | 9.8 | |
| Weeds | Height range/mm | 2~5 |
| Stalk diameter/mm | 0.1~0.3 | |
| Moisture content/% | 66.17 | |
| 0~100 mm soil layer | Penetration resistance/kPa | 326 |
| Moisture content/% | 19.83 | |
| Bulk density/(g·cm−3) | 1.28 | |
| Temperature/°C | 18.3 |
| Metrics | Values/% | Range/% | Coefficient of Variation/% | Standard Deviation |
| WRR | 88.3 | 78.6~94.1 | 6.2 | 5.44 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Y.; Qu, Y.; Fang, Y.; Yang, J.; Lu, Y. Design and Experiment of Autonomous Shield-Cutting End-Effector for Dual-Zone Maize Field Weeding. Agriculture 2025, 15, 1549. https://doi.org/10.3390/agriculture15141549
Li Y, Qu Y, Fang Y, Yang J, Lu Y. Design and Experiment of Autonomous Shield-Cutting End-Effector for Dual-Zone Maize Field Weeding. Agriculture. 2025; 15(14):1549. https://doi.org/10.3390/agriculture15141549
Chicago/Turabian StyleLi, Yunxiang, Yinsong Qu, Yuan Fang, Jie Yang, and Yanfeng Lu. 2025. "Design and Experiment of Autonomous Shield-Cutting End-Effector for Dual-Zone Maize Field Weeding" Agriculture 15, no. 14: 1549. https://doi.org/10.3390/agriculture15141549
APA StyleLi, Y., Qu, Y., Fang, Y., Yang, J., & Lu, Y. (2025). Design and Experiment of Autonomous Shield-Cutting End-Effector for Dual-Zone Maize Field Weeding. Agriculture, 15(14), 1549. https://doi.org/10.3390/agriculture15141549