
Coverage Path Planning Based on Region Segmentation and Path Orientation Optimization


Abstract
1. Introduction
2. Materials and Methods
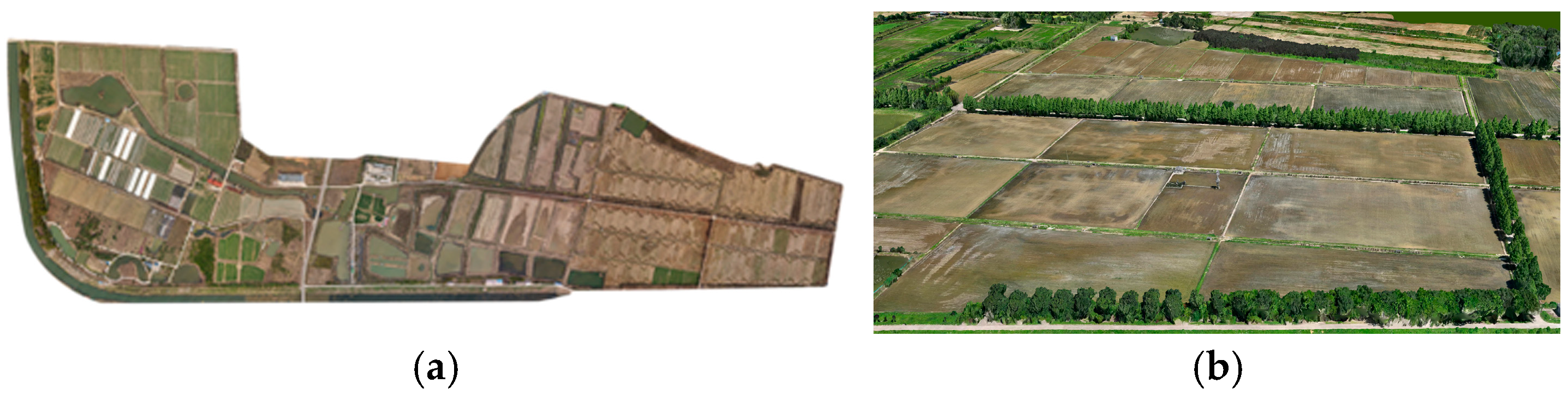
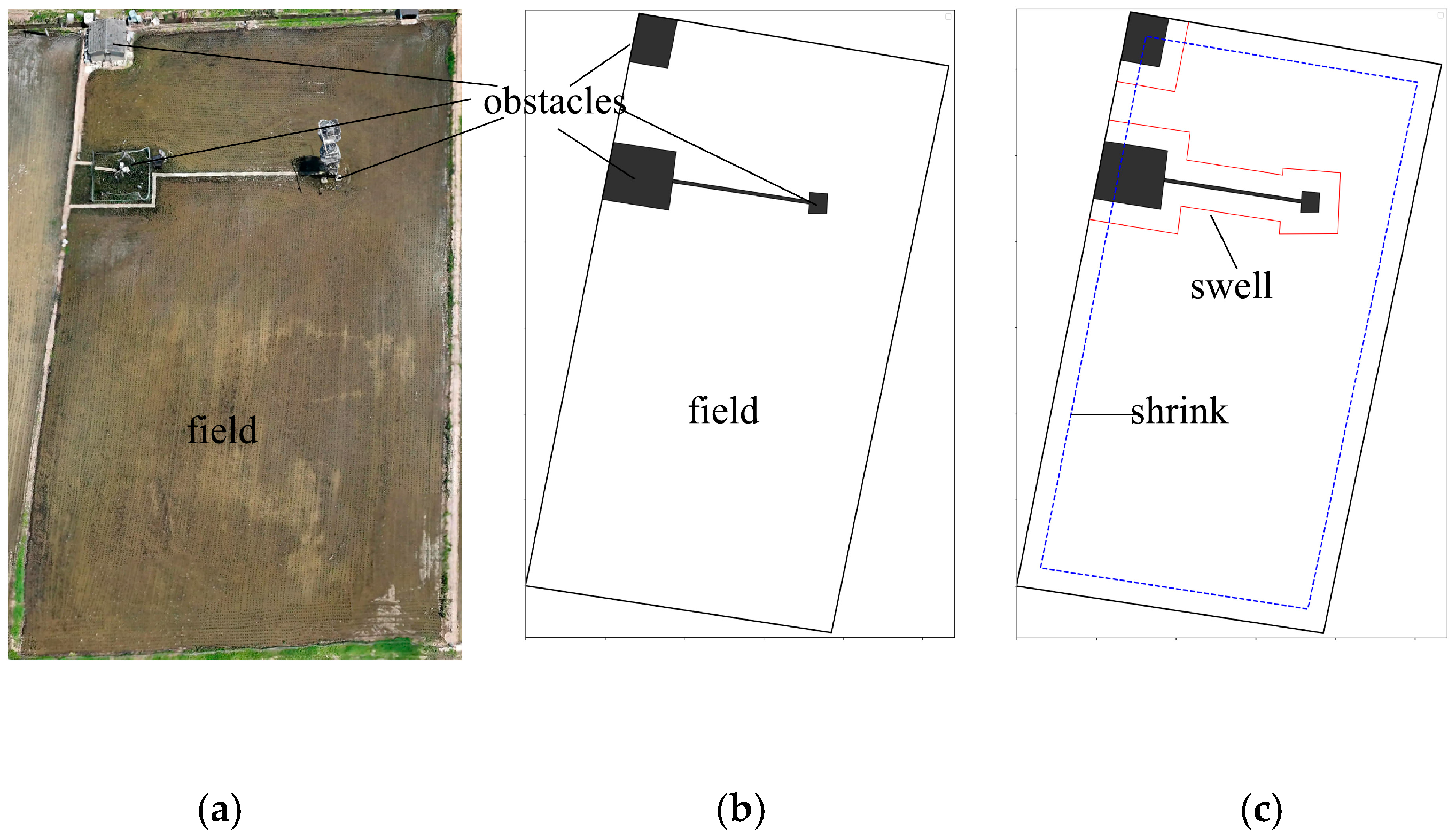
2.1. Three-Dimensional Field Reconstruction and Boundary Buffering
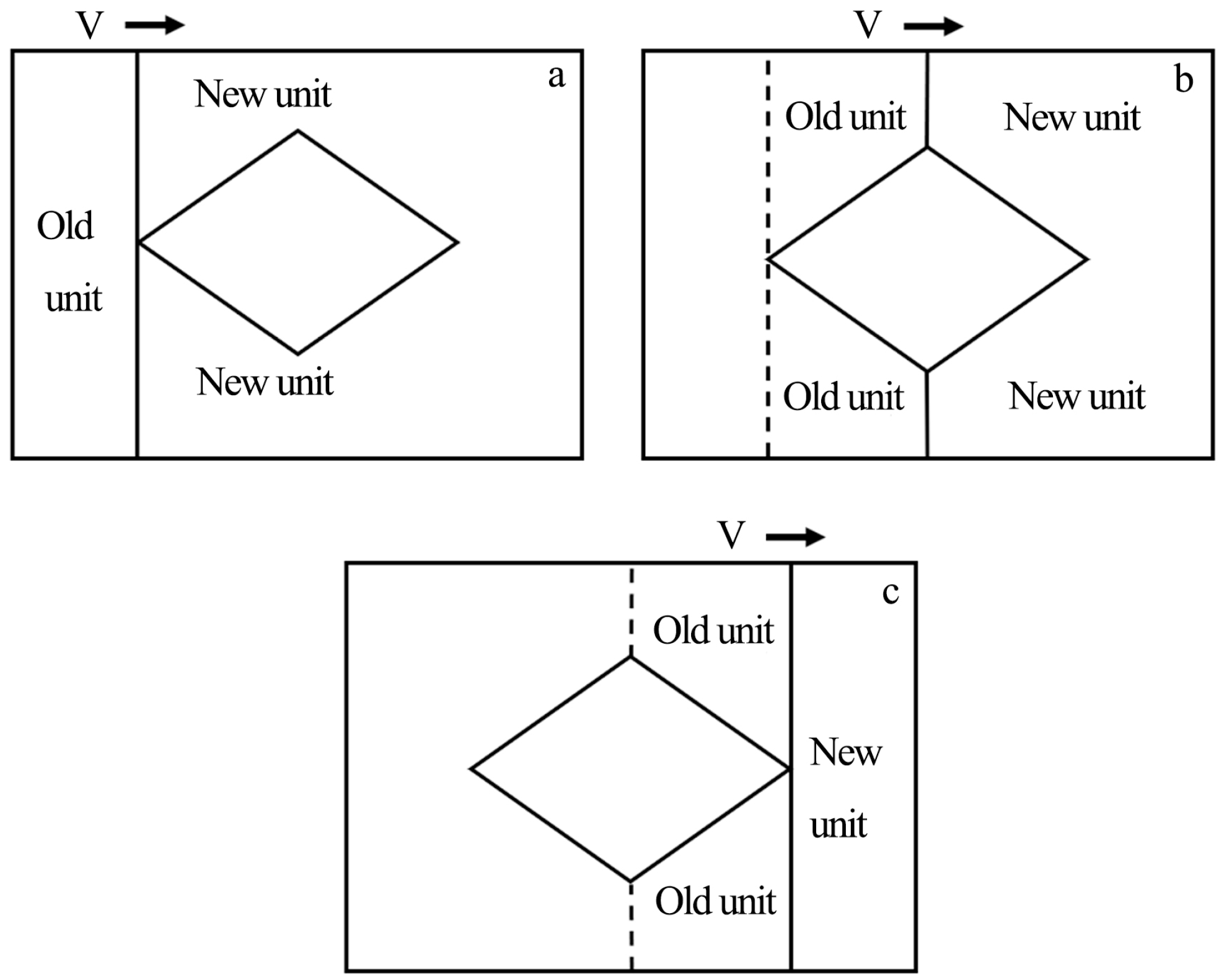
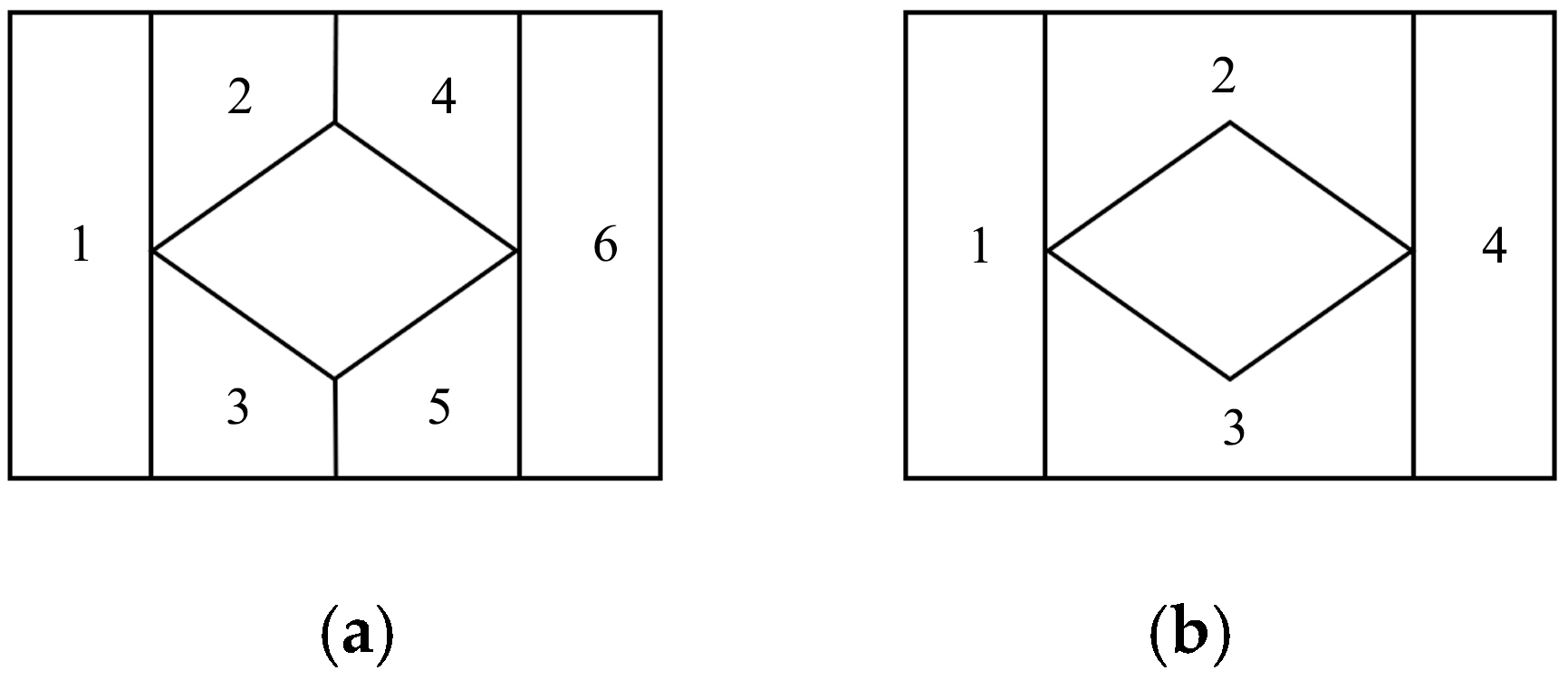
2.2. Target Area Segmentation
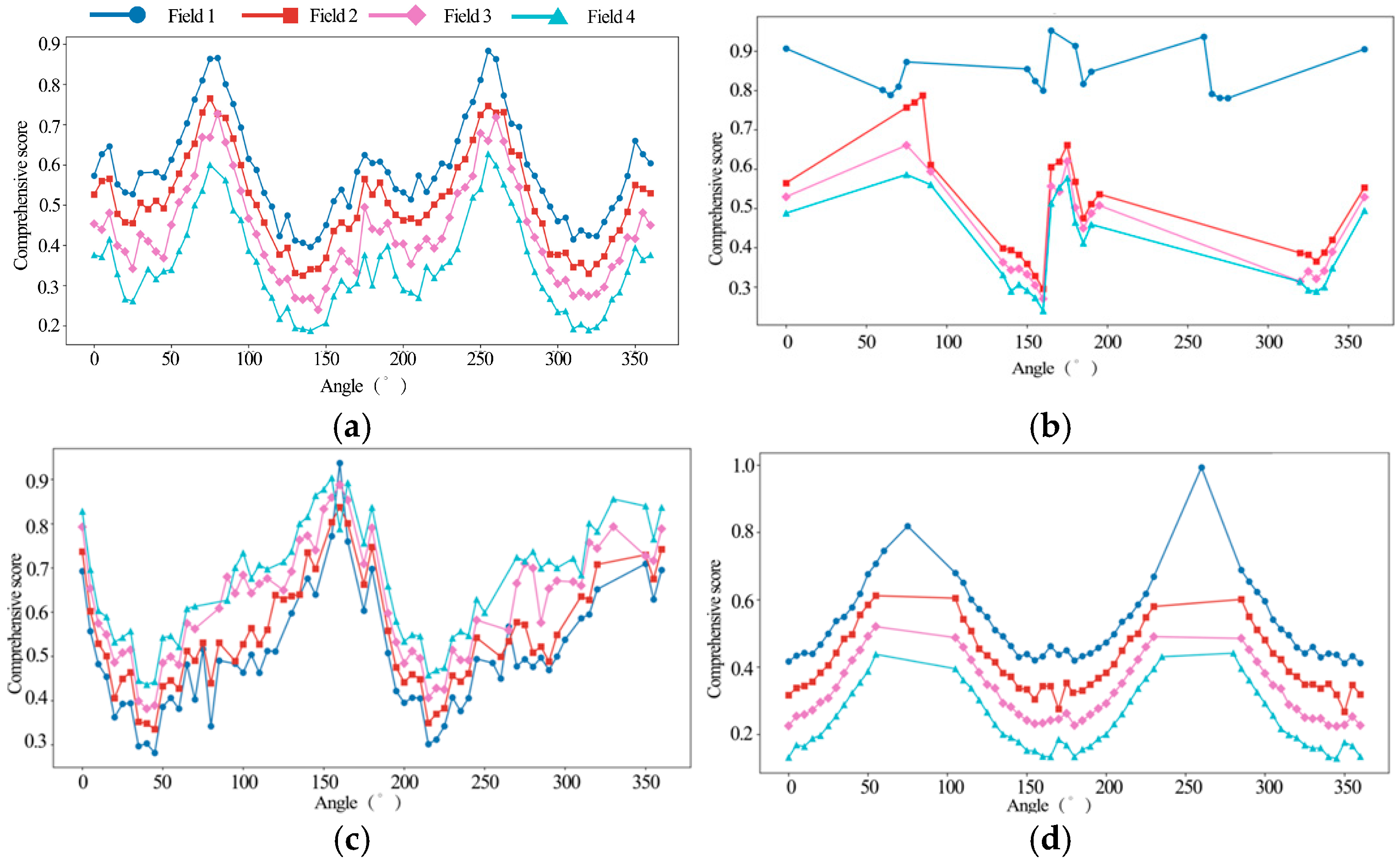
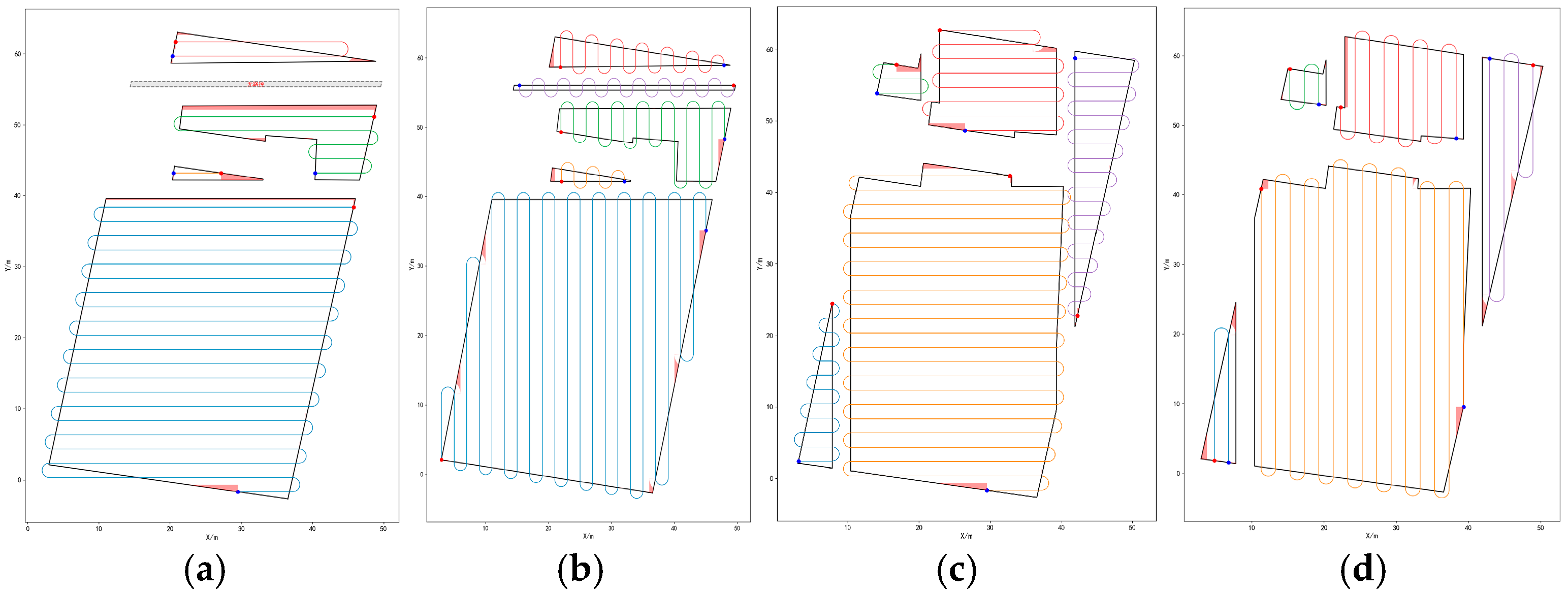
2.3. Sub-Region Coverage Path Planning
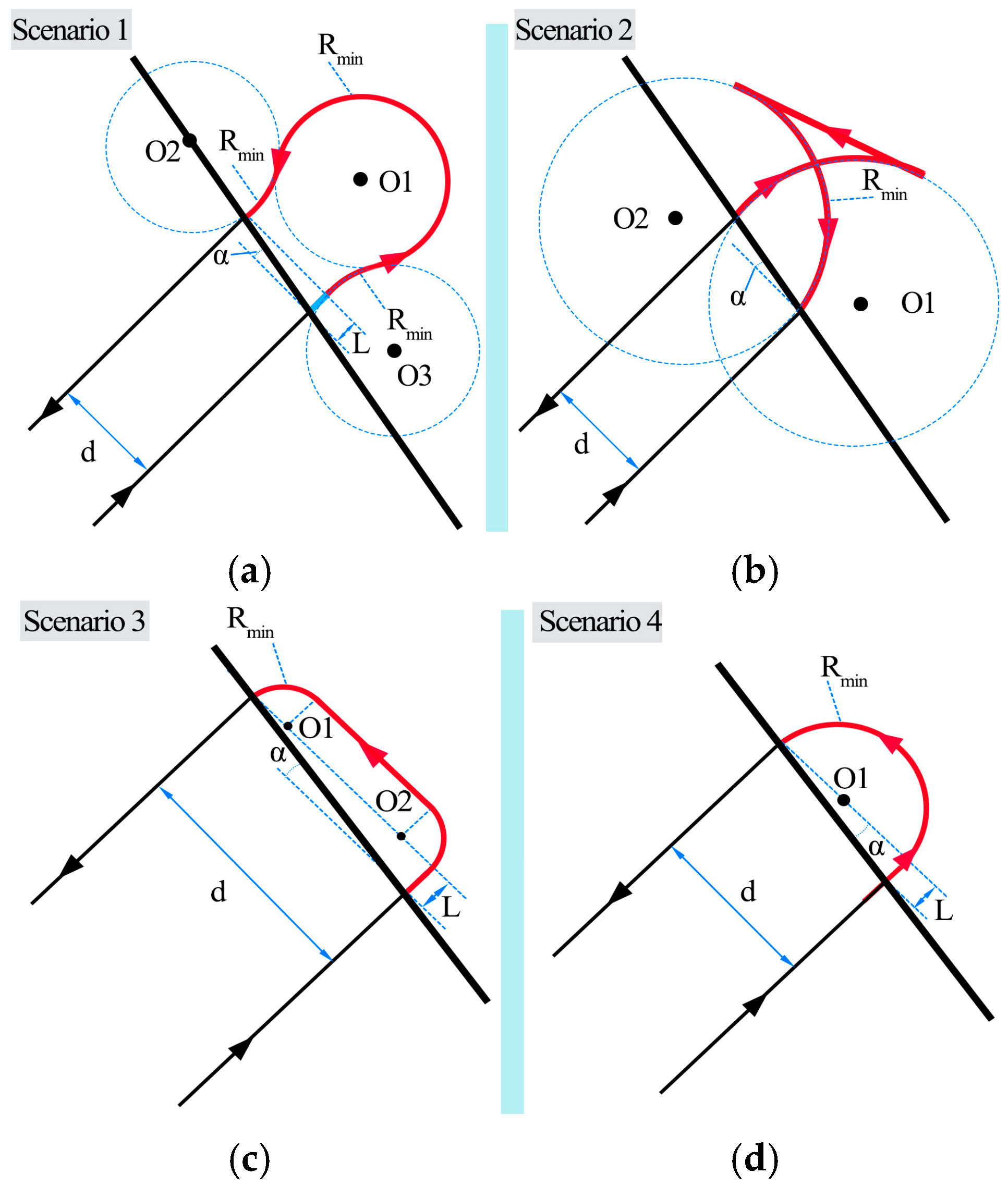
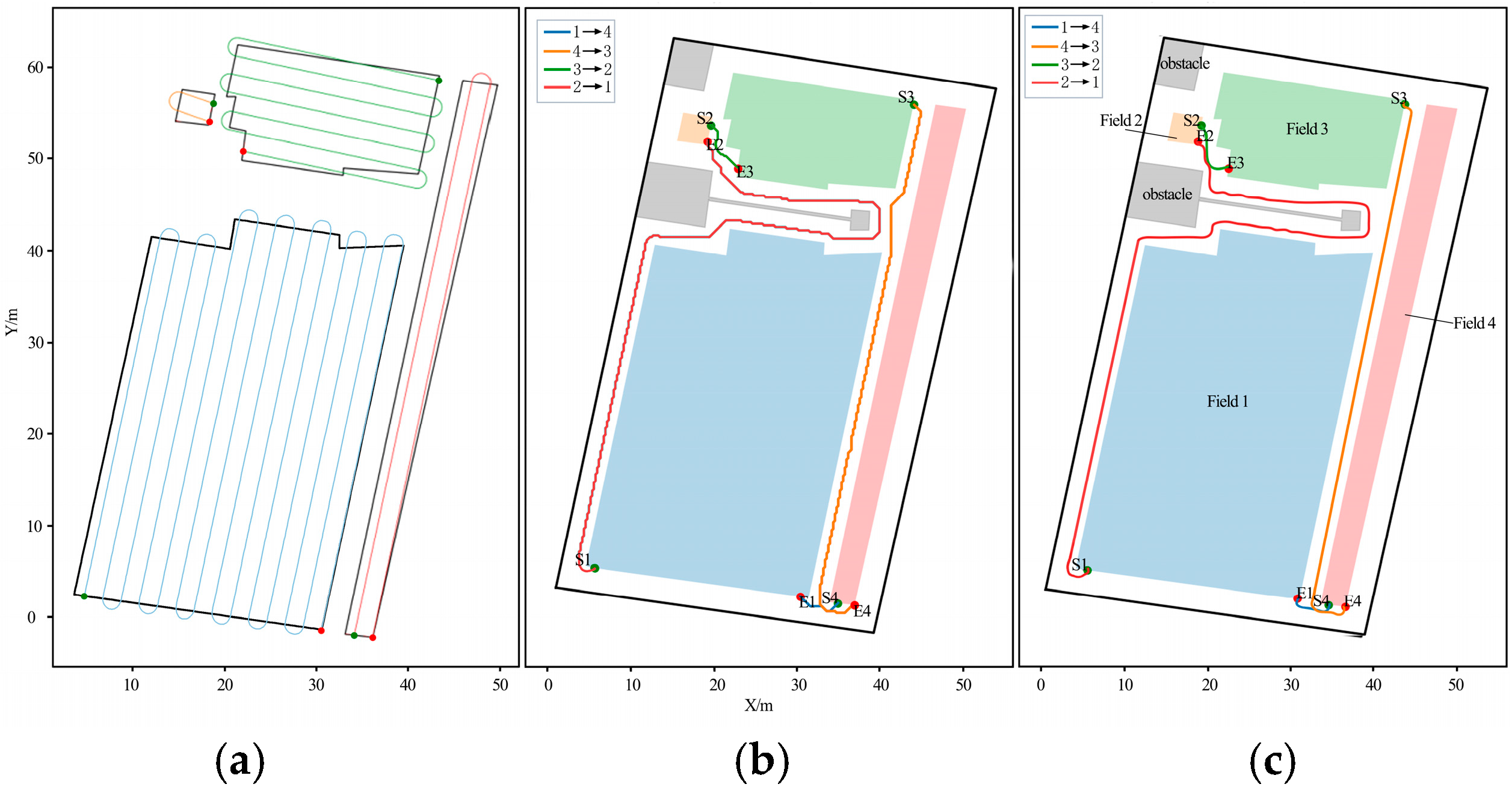
2.4. Sub-Region Traversal Planning
3. Results
3.1. Construction of 2D Field Map and Geometric Preprocessing
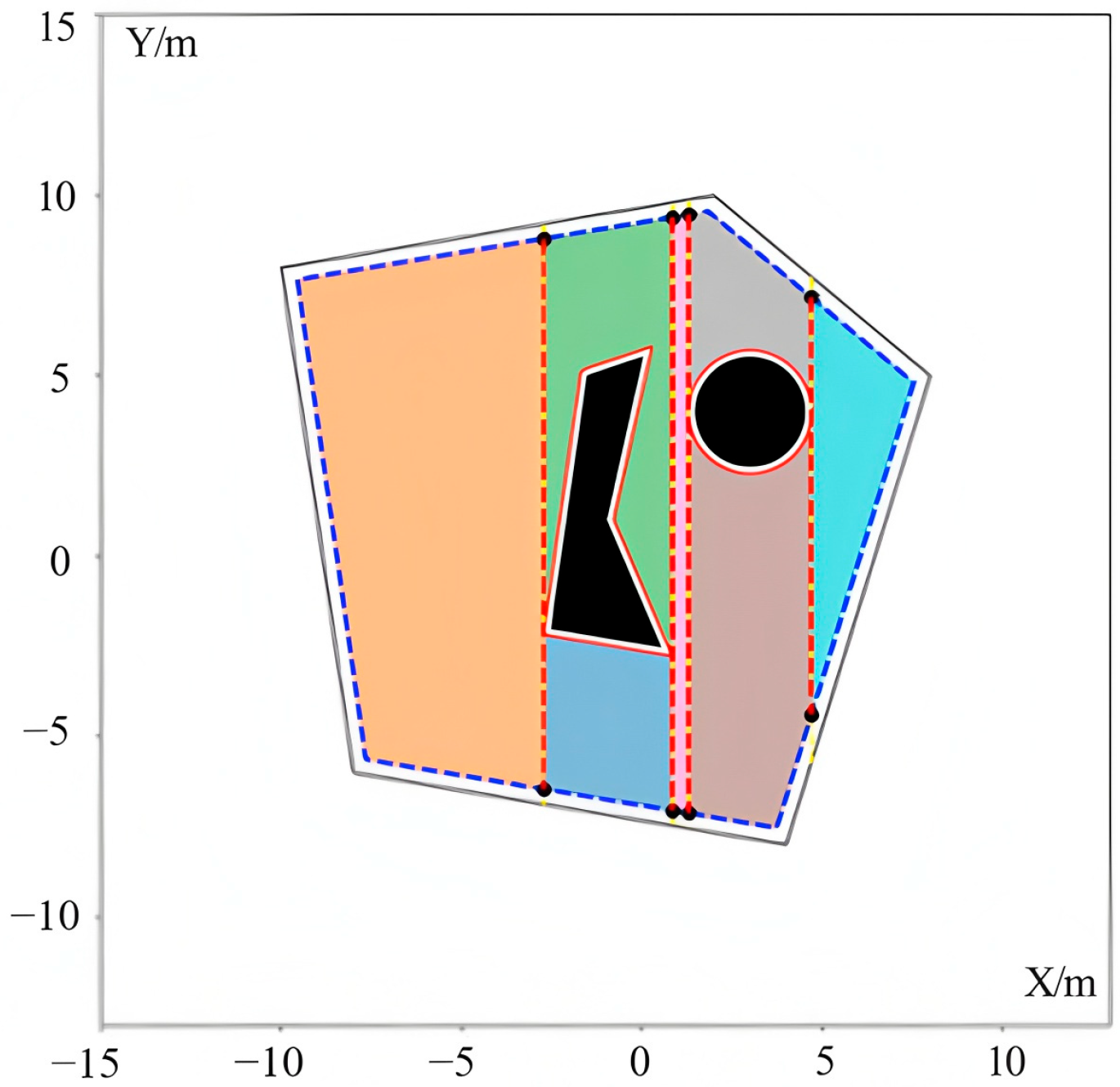
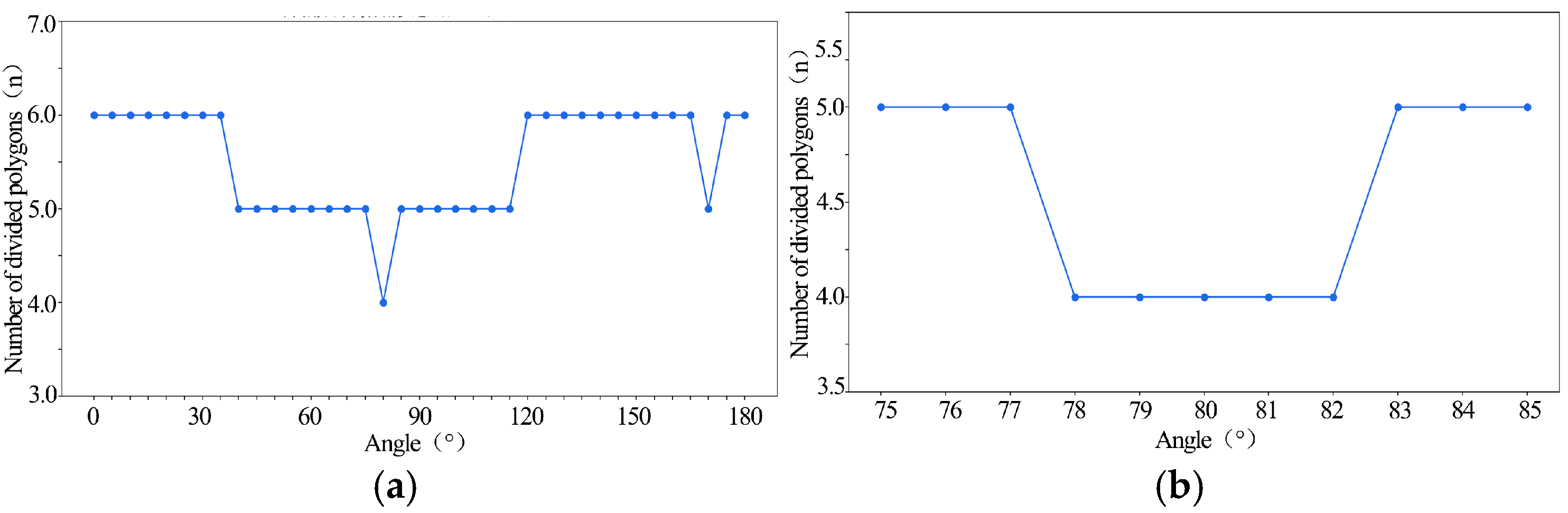
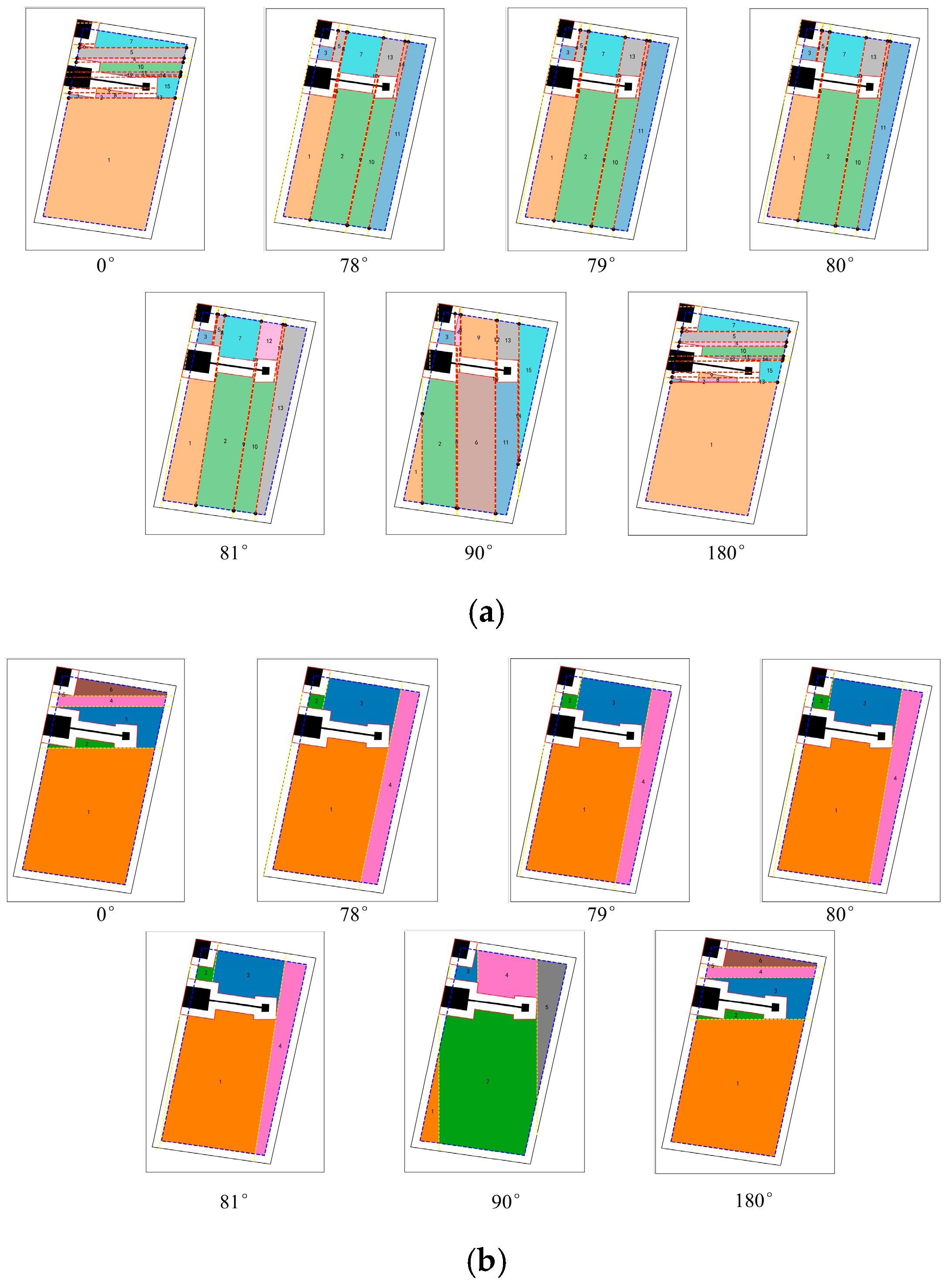
3.2. Field Partitioning
3.3. Coverage Path Planning Simulation
4. Discussion
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- Wang, M. Research on Key Technologies of Task Allocation for Multi-Machine Cooperative Operation of Agricultural Machinery. Ph.D. Thesis, Chinese Academy of Agricultural Mechanization Sciences, Beijing, China, 2021. [Google Scholar]
- Luo, R.; Gan, X.; Yang, G. A full-coverage path planning method for autonomous agricultural machinery with obstacle avoidance. J. Agric. Mech. Res. 2025, 47, 36–43. [Google Scholar] [CrossRef]
- Zhu, S.; Wang, B.; Pan, S.; Ye, Y.; Wang, E.; Mao, H. Task allocation of multi-machine collaborative operation for agricultural machinery based on the improved fireworks algorithm. Agronomy 2024, 14, 710. [Google Scholar] [CrossRef]
- Zeng, Y. Research on Full-Coverage Path Planning for Sugarcane Harvester in Irregular-Shaped Fields. Master’s Thesis, Guangxi University, Nanning, China, 2024. [Google Scholar]
- Choset, H.; Pignon, P. Coverage path planning: The boustrophedon cellular decomposition. In Field and Service Robotics; Springer: London, UK, 1998; pp. 203–209. [Google Scholar]
- Kuang, W.; Ho, H.W.; Zhou, Y. CPP-DIP: Multi-objective coverage path planning for MAVs in dispersed and irregular plantations. arXiv 2025, arXiv:2505.04989. [Google Scholar]
- Liang, J.; Liu, L. Optimal path planning method for unmanned surface vehicles based on improved shark-inspired algorithm. J. Mar. Sci. Eng. 2023, 11, 1386. [Google Scholar] [CrossRef]
- Han, J.; Li, W.; Xia, W.; Wang, F. Research on complete coverage path planning of agricultural robots based on Markov chain improved genetic algorithm. Appl. Sci. 2024, 14, 9868. [Google Scholar] [CrossRef]
- Wang, X.; Nie, T.; Zhu, D. Indoor robot path planning assisted by wireless network. J. Wirel. Com. Netw. 2019, 2019, 123. [Google Scholar] [CrossRef]
- Yang, L.; Li, P.; Wang, T.; Miao, J.; Tian, J.; Chen, C.; Tan, J.; Wang, Z. Multi-area collision-free path planning and efficient task scheduling optimization for autonomous agricultural robots. Sci. Rep. 2024, 14, 18347. [Google Scholar] [CrossRef]
- Lu, E.; Xu, L.Z.; Li, Y.M.; Tang, Z.; Ma, Z. Modeling of working environment and coverage path planning method of combine harvesters. Int. J. Agric. Biol. Eng. 2020, 13, 132–137. [Google Scholar] [CrossRef]
- Chen, T.; Xu, L.; Ahn, H.S.; Lu, E.; Liu, Y.; Xu, R. Evaluation of headland turning types of adjacent parallel paths for combine harvesters. Biosyst. Eng. 2023, 233, 93–113. [Google Scholar] [CrossRef]
- Cui, B.; Cui, X.; Wei, X.; Zhu, Y.; Ma, Z.; Zhao, Y.; Liu, Y. Design and testing of a tractor automatic navigation system based on dynamic path search and a fuzzy Stanley model. Agriculture 2024, 14, 2136. [Google Scholar] [CrossRef]
- Zhang, F.; Teng, S.; Wang, Y.F.; Guo, Z.J.; Wang, J.J.; Xu, R.L. Design of bionic goat quadruped robot mechanism and walking gait planning. Int. J. Agric. Biol. Eng. 2020, 13, 32–39. [Google Scholar] [CrossRef]
- Zhu, X.Y.; Chikangaise, P.; Shi, W.D.; Chen, W.H.; Yuan, S.Q. Review of intelligent sprinkler irrigation technologies for remote autonomous system. Int. J. Agric. Biol. Eng. 2018, 11, 23–30. [Google Scholar] [CrossRef]
- Kong, F.; Qiu, B.; Dong, X.; Yi, K.; Wang, Q.; Jiang, C.; Zhang, X.; Huang, X. Design and development of a side spray device for UAVs to improve spray coverage in obstacle neighborhoods. Agronomy 2024, 14, 2002. [Google Scholar] [CrossRef]
- Shang, G.; Liu, G.; Han, J.; Zhu, P.; Chen, P. Research on full-coverage path planning algorithm for horticultural electric tractors. J. Agric. Mech. Res. 2022, 44, 35–40. [Google Scholar] [CrossRef]
- Zoto, J.; Musci, M.A.; Khaliq, A.; Chiaberge, M.; Aicardi, I. Automatic Path Planning for Unmanned Ground Vehicle Using UAV Imagery. In Advances in Service and Industrial Robotics; Berns, K., Görges, D., Eds.; Advances in Intelligent Systems and Computing; Springer International Publishing: Cham, Switzerland, 2020; Volume 980, pp. 223–230. [Google Scholar] [CrossRef]
- Zhang, H.; Li, Q.; Feng, L. Assessing the Severity of Verticillium Wilt in Cotton Fields and Constructing Pesticide Prescription Maps Using UAV Multispectral Images. Drones 2023, 8, 176. [Google Scholar] [CrossRef]
- Liu, C.Q.; Zhao, X.Y.; Du, Y.F.; Cao, C.; Zhu, Z.; Mao, E. Research on static path planning method of small obstacles for automatic navigation of agricultural machinery. IFAC-Pap. Online 2018, 51, 748–753. [Google Scholar] [CrossRef]
- Schirmer, R.; Biber, P.; Stachniss, C. Coverage path planning in belief space. In Proceedings of the 2019 IEEE International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019; pp. 7604–7610. [Google Scholar]
- Lu, Q.; Luna, R. Adaptive multiple distributed bidirectional spiral path planning for foraging robot swarms. In Proceedings of the 2023 20th Conference on Robots and Vision (CRV), Montreal, QC, Canada, 6–8 June 2023; pp. 225–232. [Google Scholar] [CrossRef]
- Ahmed, S.; Qiu, B.; Ahmad, F.; Kong, C.-W.; Xin, H. A state-of-the-art analysis of obstacle avoidance methods from the perspective of an agricultural sprayer UAV’s operation scenario. Agronomy 2021, 11, 1069. [Google Scholar] [CrossRef]
- Kharel, T.; Owens, P.; Ashworth, A. Tractor path overlap is influenced by field shape and terrain attributes. Agric. Environ. Lett. 2020, 5, e20027. [Google Scholar] [CrossRef]
- Mier, G.; Valente, J.; de Bruin, S. Fields2Cover: An open-source coverage path planning library for unmanned agricultural vehicles. IEEE Robot. Autom. Lett. 2023, 8, 2436–2443. [Google Scholar] [CrossRef]
- Chen, W.; Yang, J.; Zhang, S.; Wei, X.; Liu, C.; Zhou, X.; Sun, L.; Wang, F.; Wang, A. Variable scale operational path planning for land levelling based on the improved ant colony optimization algorithm. Sci. Rep. 2025, 15, 9854. [Google Scholar] [CrossRef]
- Mansur, H.; Gadhwal, M.; Abon, J.E.; Flippo, D. Mapping for Autonomous Navigation of Agricultural Robots Through Crop Rows Using UAV. Agriculture 2025, 15, 882. [Google Scholar] [CrossRef]
- Gao, C.; Wang, S.; Hu, J.; Liang, Y. Planning method of field road network reconstruction under mechanized farming mode. J. Xihua Univ. (Nat. Sci. Ed.) 2024, 43, 45–54. [Google Scholar]
- Liu, H. Research on Development of Automatic Driving Equipment and Path Planning Algorithm for Agricultural Machinery. Master’s Thesis, North University of China, Taiyuan, China, 2023. [Google Scholar]
- Yang, L.; Tang, X.; Wu, S.; Wen, L.; Yang, W.; Wu, C. Local path planning for autonomous agricultural machinery on field roads. Trans. Chin. Soc. Agric. Eng. 2024, 40, 27–36. [Google Scholar]
- Höffmann, M.; Patel, S.; Büskens, C. Optimal coverage path planning for agricultural vehicles with curvature constraints. Agriculture 2023, 13, 2112. [Google Scholar] [CrossRef]
- Li, J.; Shang, Z.; Li, R.; Cui, B. Adaptive sliding mode path tracking control of unmanned rice transplanter. Agriculture 2022, 12, 1225. [Google Scholar] [CrossRef]
- Cui, Z.; Li, Y.; Zhang, C.; Liu, Y.; Ren, F. Coarse-to-fine 3D road model registration for traffic video augmentation. IET Image Process. 2020, 14, 2690–2700. [Google Scholar] [CrossRef]
- Oksanen, T.; Visala, A. Coverage path planning algorithms for agricultural field machines. J. Field Robot. 2009, 26, 651–668. [Google Scholar] [CrossRef]
- Kim, C.; Kim, Y.; Yi, H. Fuzzy analytic hierarchy process-based mobile robot path planning. Electronics 2020, 9, 290. [Google Scholar] [CrossRef]
- Liu, Y.; Geng, D.; Lan, Y.; Tan, D.; Mou, X.; Sun, Y. Research progress on full-coverage path planning of agricultural equipment based on automatic navigation. Chin. J. Agric. Mech. 2020, 41, 185–192. [Google Scholar]
- Nan, F.; Cao, G.; Li, Y.; Chen, C.; Liu, D. Research on scheduling optimization based on walking direction of wheat harvester operation routes. Chin. J. Agric. Mech. 2022, 43, 98–105. [Google Scholar]
- de Berg, M.; van Kreveld, M.; Overmars, M.; Schwarzkopf, O. Computational Geometry: Algorithms and Applications, 3rd ed.; Springer: Berlin, Germany, 2008; pp. 5–8. [Google Scholar]
- Damanauskas, V.; Janulevičius, A. Validation of criteria for predicting tractor fuel consumption and CO2 emissions when ploughing fields of different shapes and dimensions. AgriEngineering 2023, 5, 2408–2422. [Google Scholar] [CrossRef]
- Kaivosoja, J.; Linkolehto, R. Spatial overlapping in crop farming works. Agron. Res. 2016, 14, 41–53. Available online: https://api.semanticscholar.org/CorpusID:54953705 (accessed on 10 March 2025).
- Collins, L.; Ghassemi, P.; Esfahani, E.T.; Doermann, D.; Dantu, K.; Chowdhury, S. Scalable coverage path planning of multi-robot teams for monitoring non-convex areas. In Proceedings of the 2021 IEEE International Conference on Robotics and Automation (ICRA), Xi’an, China, 30 May–5 June 2021; pp. 7393–7399. [Google Scholar] [CrossRef]
- Ahmed, S.; Qiu, B.; Kong, C.-W.; Xin, H.; Ahmad, F.; Lin, J. A data-driven dynamic obstacle avoidance method for liquid-carrying plant protection UAVs. Agronomy 2022, 12, 873. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter Name | Symbol | Unit |
|---|---|---|
| Sub-region width (long side) | m | |
| Working width | m | |
| Safety allowance accounting for GNSS error | m | |
| Minimum turning radius of agricultural machine | m | |
| The offset distance | m | |
| Angle between path and field boundary | ° | |
| Segmentation angle | ° | |
| Path planning angle | ° |
| Planner | Coverage Rate (%) | Number of Turns | Path Length (m) | Planning Time (s) | Overlap Rate (%) |
|---|---|---|---|---|---|
| Angle-adaptive (proposed) | 99.97 | 21 | 897.19 | 0.0225 | 0.00 |
| Belief-space | 99.24 | 32 | 1164.00 | 0.052 | 0.00 |
| Bidirectional spiral | 92.23 | 93 | 1044.00 | 0.043 | 1.11 |
| Segmentation Angle (°) | Heading Angle (°) | Coverage Rate (%) | Number of Turns | Path Length (m) | Planning Time (s) | Overlap Rate (%) |
|---|---|---|---|---|---|---|
| 90 | 0 | 99.14 | 71 | 1167.48 | 0.1561 | 2.21 |
| 90 | 98.04 | 32 | 1056.17 | 0.0722 | 0 | |
| 0 | 0 | 98.74 | 32 | 1069.17 | 0.0716 | 0.20 |
| 90 | 99.41 | 81 | 1209.96 | 0.1496 | 8.25 |
| Plot ID | Entry Coordinates | Exit Coordinates |
|---|---|---|
| 1 | (3.796, 2.492) | (29.615, −1.09) |
| 2 | (18.771, 56.08) | (18.362, 54.106) |
| 3 | (43.323, 58.591) | (22.039, 50.847) |
| 4 | (34.147, −1.88) | (48.798, 58.171) |
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| Clearance (m) | 1.5 | Turn threshold (°) | 30 |
| Grid resolution (m) | 0.1 | RDP Epsilon (ε) | 1.5 |
| Corner radius (m) | 1.0 | Tolerance (TOL) | 0.9 |
| Corner samples | 3 | Max radius filter | 25 |
| Chaikin iterations | 1 |
| Segment | Distance (m) | Avg Radius (m) | Turns | Steps |
|---|---|---|---|---|
| 1 → 4 | 5.04 | 5.48 | 1 | 69 |
| 4 → 3 | 66.55 | 11.06 | 2 | 785 |
| 3 → 2 | 7.76 | 5.12 | 1 | 84 |
| 2 → 1 | 98.47 | 8.77 | 6 | 1126 |
| Total | 177.81 | 7.61 | 10 | 2064 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, T.; Du, X.; Zhang, B.; Wang, X.; Zhang, Z.; Wu, C. Coverage Path Planning Based on Region Segmentation and Path Orientation Optimization. Agriculture 2025, 15, 1479. https://doi.org/10.3390/agriculture15141479
Yang T, Du X, Zhang B, Wang X, Zhang Z, Wu C. Coverage Path Planning Based on Region Segmentation and Path Orientation Optimization. Agriculture. 2025; 15(14):1479. https://doi.org/10.3390/agriculture15141479
Chicago/Turabian StyleYang, Tao, Xintong Du, Bo Zhang, Xu Wang, Zhenpeng Zhang, and Chundu Wu. 2025. "Coverage Path Planning Based on Region Segmentation and Path Orientation Optimization" Agriculture 15, no. 14: 1479. https://doi.org/10.3390/agriculture15141479
APA StyleYang, T., Du, X., Zhang, B., Wang, X., Zhang, Z., & Wu, C. (2025). Coverage Path Planning Based on Region Segmentation and Path Orientation Optimization. Agriculture, 15(14), 1479. https://doi.org/10.3390/agriculture15141479