
Tracking Accuracy Evaluation of Autonomous Agricultural Tractors via Rear Three-Point Hitch Estimation Using a Hybrid Model of EKF Transformer

Abstract
1. Introduction
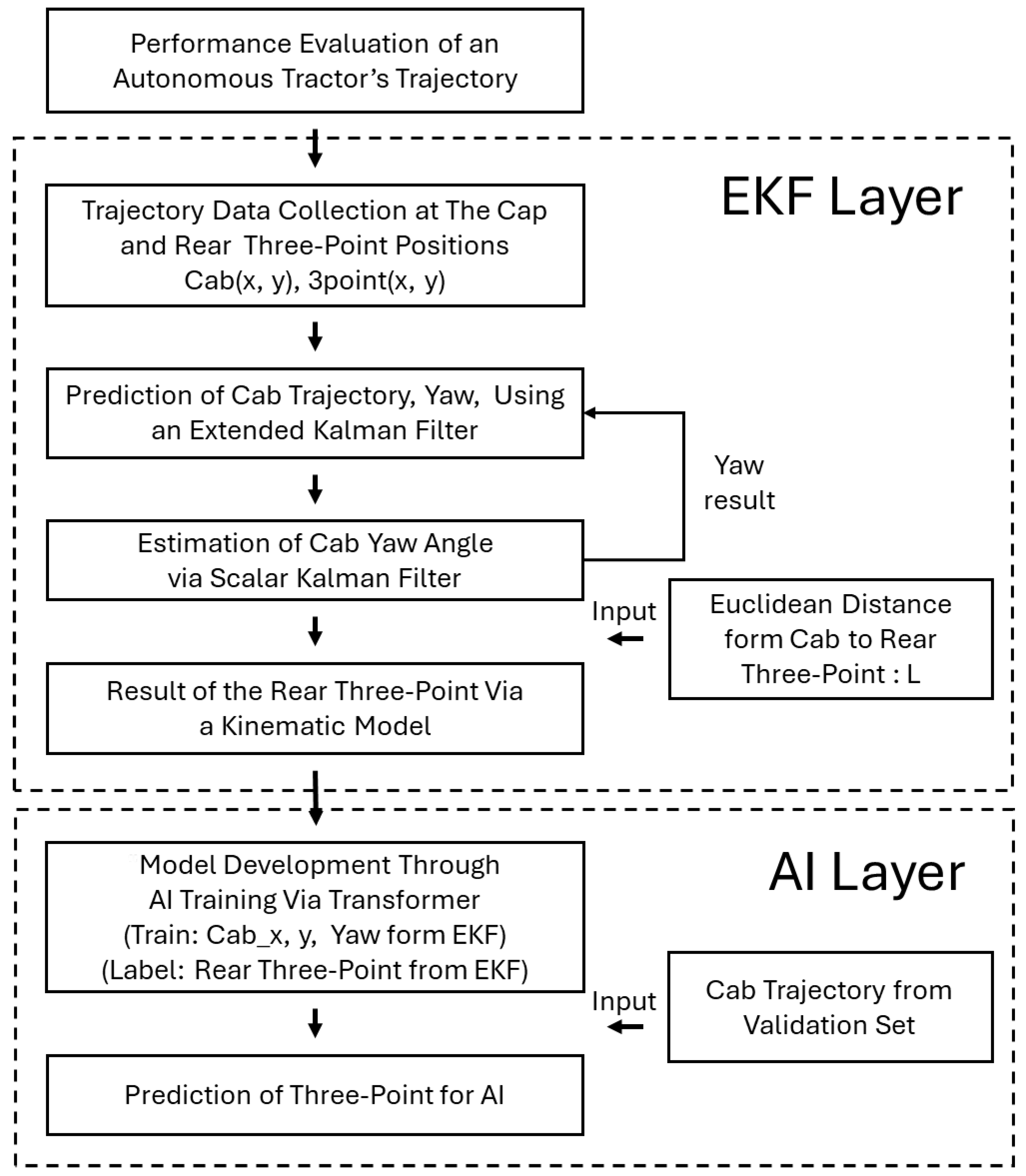
- The development of a hybrid model combining an extended Kalman filter (EKF) and an artificial intelligence-based transformer for the purpose of tracking the Rear 3-Point device of a tractor is presented in this study.
- A demonstration test was conducted, and a comparative analysis of the hybrid model was undertaken to enhance the autonomous driving path-following capability.
2. Materials and Methods
2.1. Prediction Model Development Procedure
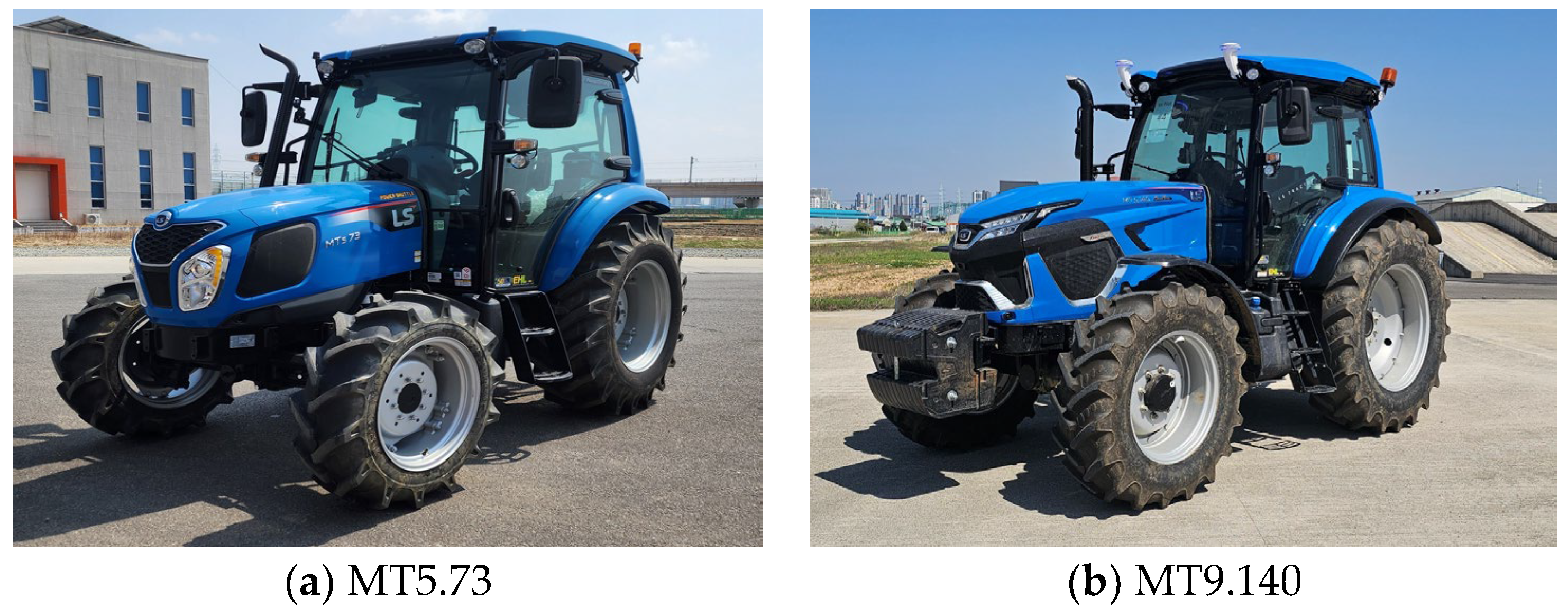
2.2. Agricultural Tractor and Autonomous Driving System
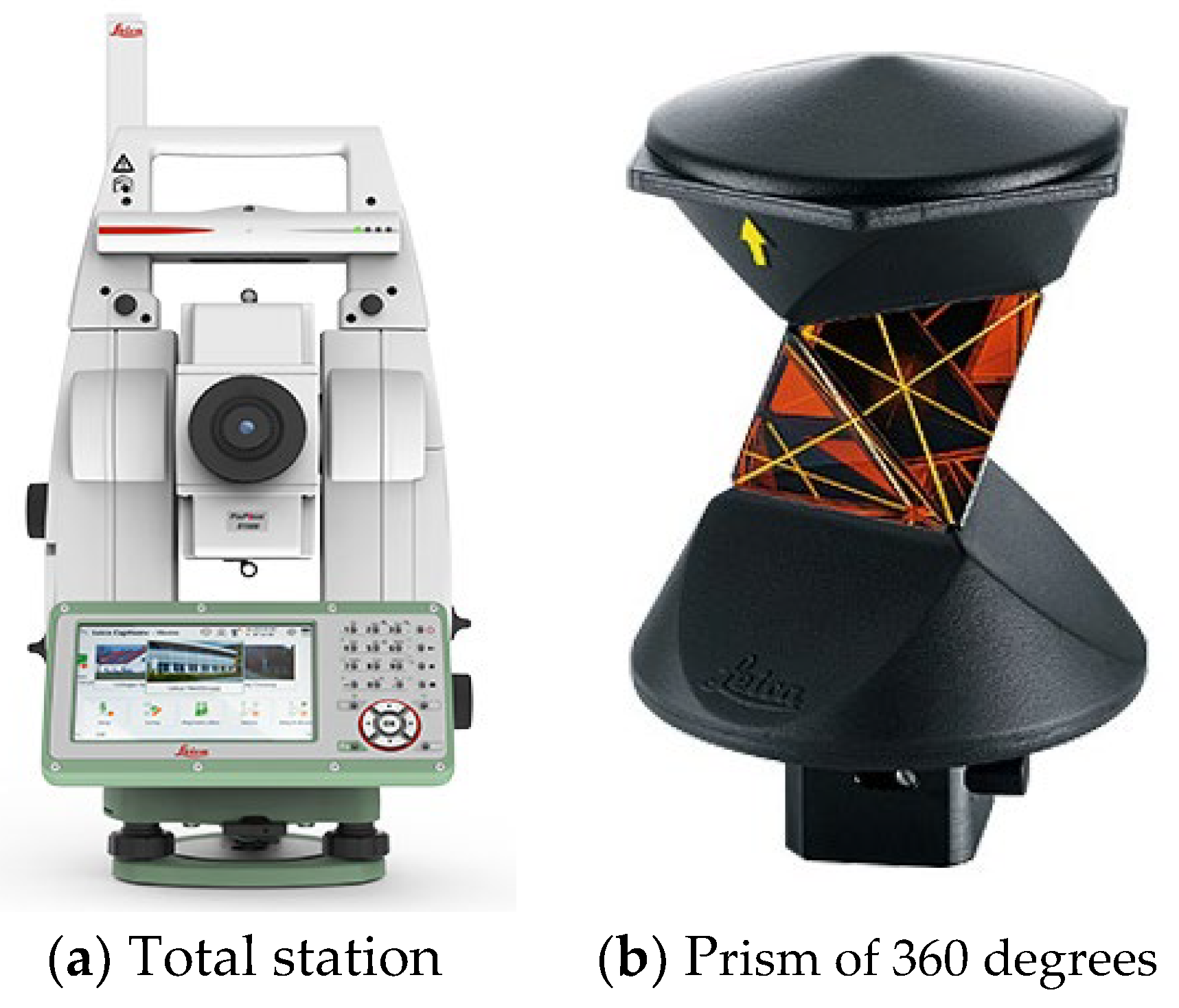
2.3. Total Station and Prism
2.4. Testing Field and Planned Trajectory
2.5. EKF and Transformer Model Development Methods
2.5.1. Data Preprocessing and Independent Variable Analysis
2.5.2. Correction of Time-Series Misalignment and Coordinate Normalization
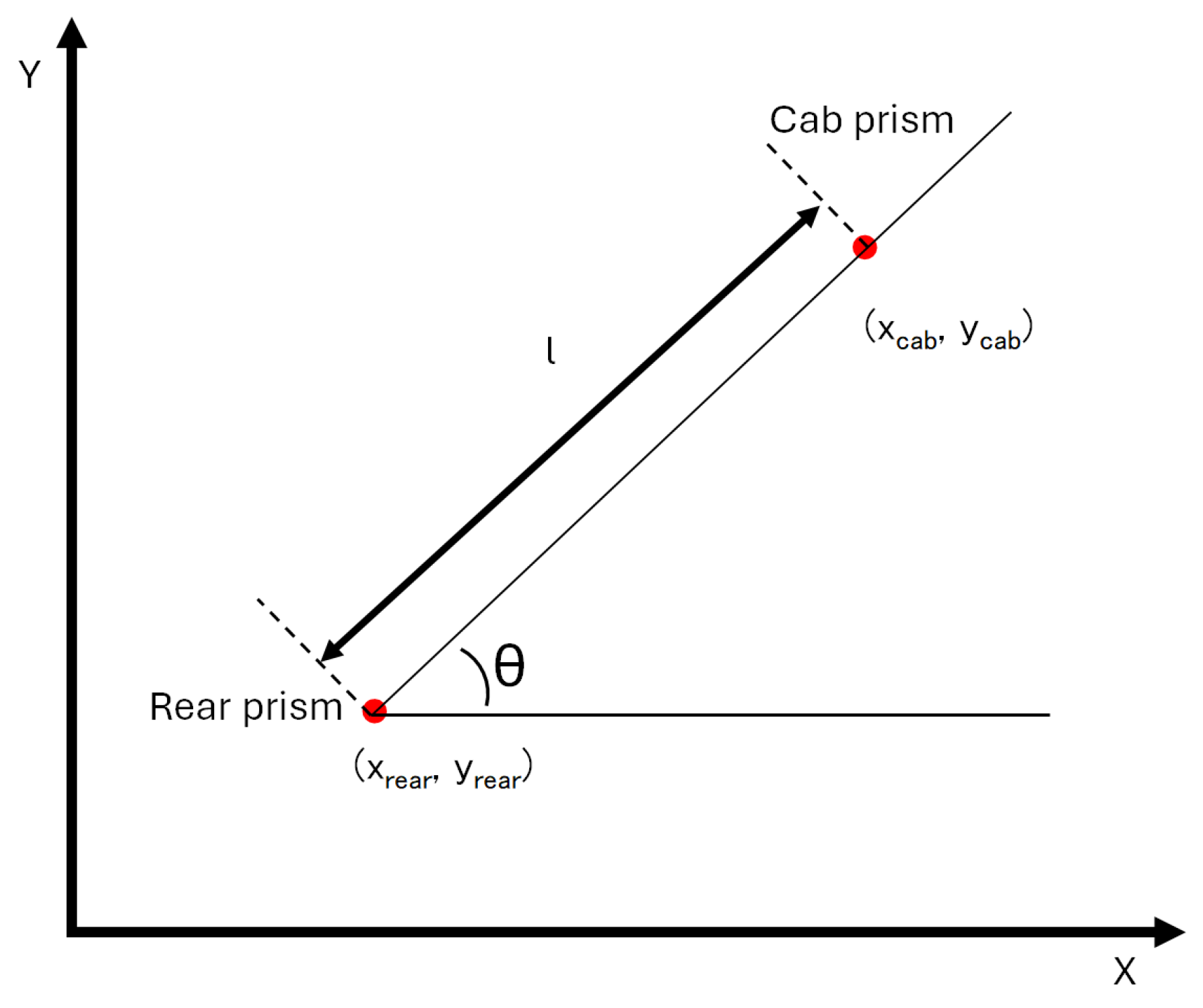
2.5.3. Kinematic Model
2.5.4. EKF for Prediction Rear 3-Point
State Vector and System Mode
Prediction Step
Update Step
Scalar Kalman Filter for Yaw Stabilization
Estimation of Rear 3-Point Coordinates
2.5.5. Encoder-Only Attention Mechanism
Input Configuration and Preprocessing
Input Embedding Layer
Multi-Head Self-Attention Encoder
Feedforward Neural Network (FFN)
Final Output Projection and Loss Function
3. Results and Discussion
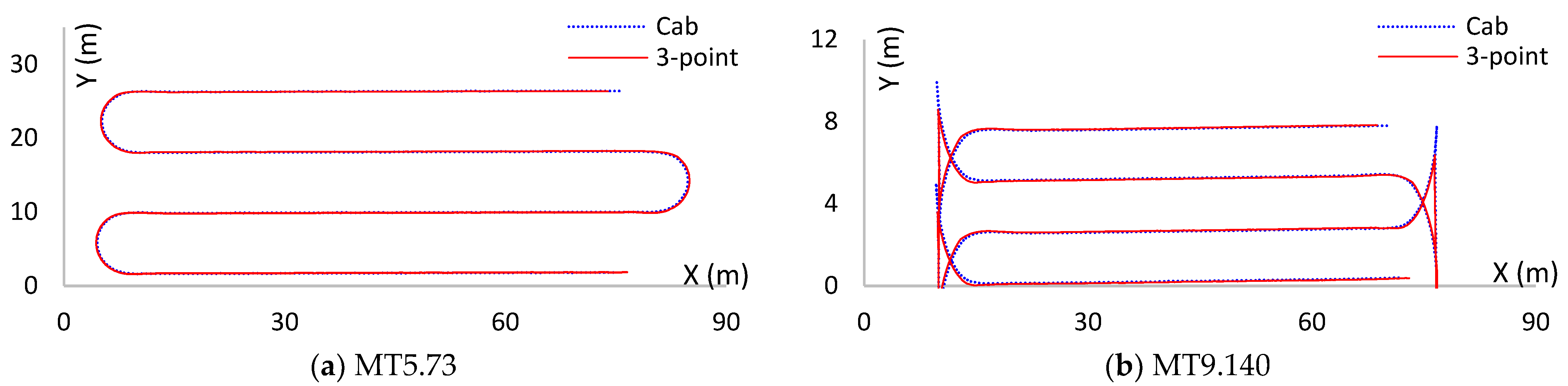
3.1. Experimental Measurement Results of Autonomous Driving Trajectories
3.2. Experimental Results on Installation Error Deviations of the Rear 3-Point Sensor
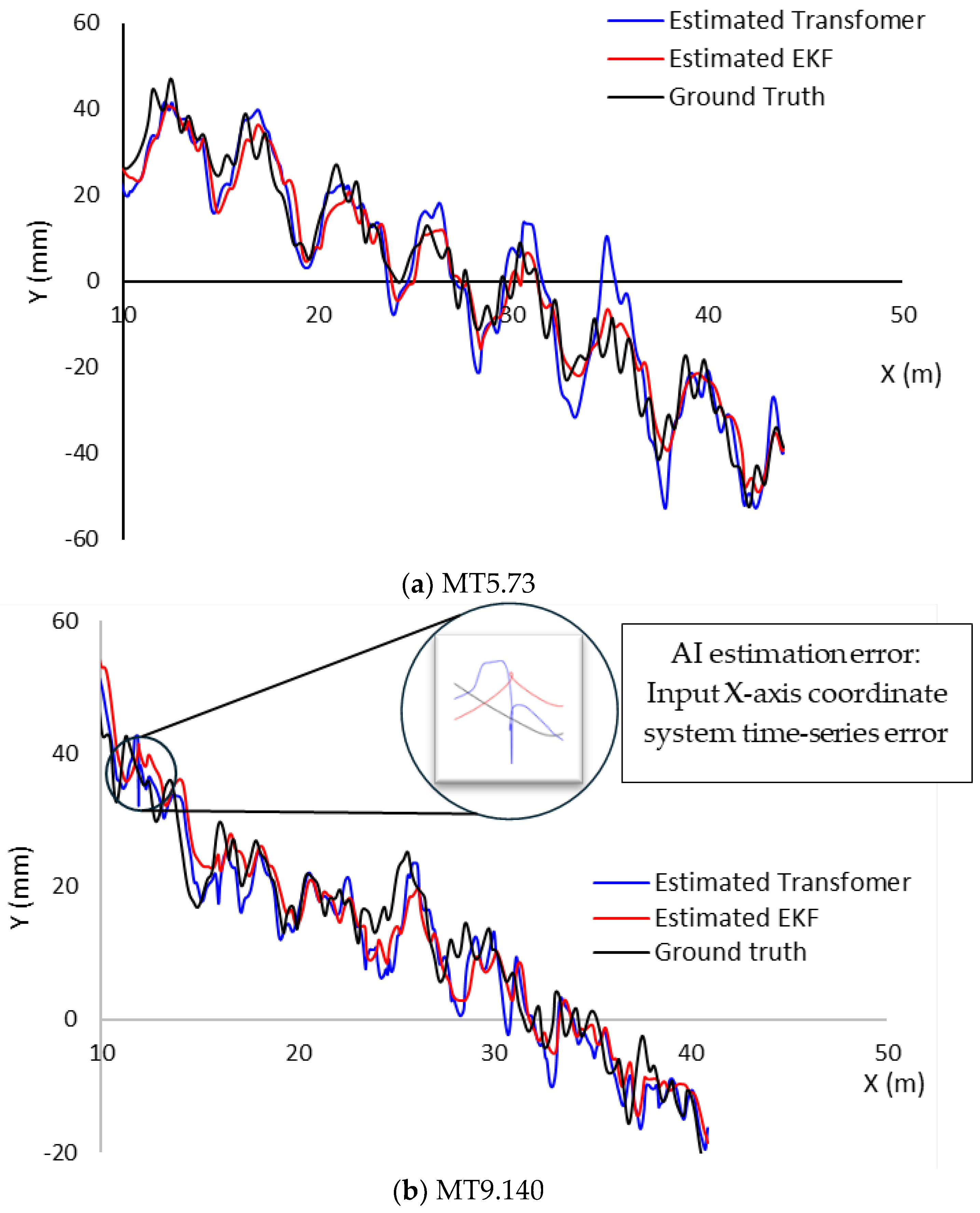
3.3. Comparison of Prediction Accuracy Between EKF Model and AI Model
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- Kim, Y.-T.; Kim, Y.-H.; Baek, S.-M.; Kim, Y.-J. Technology Trend on Autonomous Agricultural Machinery. J. Drive Control 2022, 95, 95–99. [Google Scholar]
- Yuan, J.; Ji, W.; Feng, Q. Robots and Autonomous Machines for Sustainable Agriculture Production. Agriculture 2023, 13, 1340. [Google Scholar] [CrossRef]
- Erenstein, O.; Chamberlin, J.; Sonder, K. Farms worldwide: 2020 and 2030 outlook. Outlook Agric. 2021, 50, 221–229. [Google Scholar] [CrossRef]
- Qu, J.; Zhang, Z.; Qin, Z.; Guo, K.; Li, D. Applications of Autonomous Navigation Technologies for Unmanned Agricultural Tractors: A Review. Machines 2024, 12, 218. [Google Scholar] [CrossRef]
- Han, J.-H.; Park, C.-H.; Jang, Y.Y.; Gu, J.D.; Kim, C.Y. Performance Evaluation of an Autonomously Driven Agricultural Vehicle in an Orchard Environment. Sensors 2022, 22, 114. [Google Scholar] [CrossRef]
- Ren, H.; Wu, J.; Lin, T.; Yao, Y.; Liu, C. Research on an Intelligent Agricultural Machinery Unmanned Driving System. Agriculture 2023, 13, 1907. [Google Scholar] [CrossRef]
- Xie, K.; Zhang, Z.; Zhu, S. Enhanced Agricultural Vehicle Positioning through Ultra-Wideband-Assisted Global Navigation Satellite Systems and Bayesian Integration Techniques. Agriculture 2024, 14, 1396. [Google Scholar] [CrossRef]
- MAFRA Notification, No.2023-1; Standards for the Testing of Agricultural Machinery. Ministry of Agriculture, Food and Rural Affairs: Sejong, Repubic of Korea, 2023.
- Korea Agriculture Technology Promotion Agency. Detailed implementation guidelines for testing and safety management of agricultural machinery. KOAT 2025. Available online: https://lab.koat.or.kr/front/analysis/AgriMachStruRsearchMethodAction.do?method=list&bbId=10 (accessed on 2 July 2025).
- Antoshchenkov, R.; Antoshchenkova, V.; Kis, V.; Smitskov, D. Increasing accuracy of measuring functioning parameters of agricultural units. Eng. Rural Dev. 2023, 22, 210–215. [Google Scholar] [CrossRef]
- Benterki, A.; Boukhnifer, M.; Judalet, V.; Maaoui, C. Artificial intelligence for vehicle behavior anticipation: Hybrid approach based on maneuver classification and trajectory prediction. IEEE Access 2020, 8, 56992–57002. [Google Scholar] [CrossRef]
- Zhou, H.; Zhang, S.; Peng, J.; Zhang, S.; Li, J.; Xiong, H.; Zhang, W. Informer: Beyond Efficient Transformer for Long Sequence Time-Series Forecasting. Proc. AAAI 2021, 35, 11106–11115. [Google Scholar] [CrossRef]
- Wen, Q.; Zhou, T.; Zhang, C.; Chen, W.; Ma, Z.; Yan, Z.; Yan, J.; Sun, L. Transformers in Time Series: A Survey. In Proceedings of the Thirty-Second International Joint Conference on Artificial Intelligence, Macao, China, 19–25 August 2023; Volume 23, pp. 6778–6786. [Google Scholar] [CrossRef]
- Gan-Mor, S.; Clark, R.L.; Upchurch, B.L. Implement lateral position accuracy under RTK-GPS tractor guidance. Comput. Electron. Agric. 2007, 59, 31–38. [Google Scholar] [CrossRef]
- Lim, R.-G.; Kim, T.-B.; Kim, W.-S.; Baek, S.-Y.; Jeon, H.-H.; Ham, J.-Y.; Yoo, C.; Kim, Y.-J. Development and validation of prediction model for exhaust emissions during tractor plow tillage. Agriculture 2024, 14, 2334. [Google Scholar] [CrossRef]
- ISO 12188-1:2012; Tractors and Machinery for Agriculture and Forestry—Test Procedures for Positioning and Guidance Systems—Part 1: General Principles. International Organization for Standardization: Geneva, Switzerland, 2012.
- ISO 12188-2:2012; International Organization for Standardization. Tractors and Machinery for Agriculture and Forestry—Test Procedures for Positioning and Guidance Systems—Part 2: Testing of Satellite-Based Auto-Guidance Systems During Straight and Level Travel. International Organization for Standardization: Geneva, Switzerland, 2012.
- Hegedüs, F.; Bécsi, T.; Aradi, S.; Szalay, Z.; Gáspár, P. Real-time optimal motion planning for automated road vehicles. IFAC-Pap. 2020, 53, 15647–15652. [Google Scholar] [CrossRef]
- Shen, S.; Chen, J.; Yu, G.; Zhai, Z.; Han, P. KalmanFormer: Using transformer to model the Kalman Gain in Kalman Filters. Front. Neurorobot. 2025, 18, 1460255. [Google Scholar] [CrossRef]
- Vaswani, A.; Shazeer, N.; Parmar, N.; Uszkoreit, J.; Jones, L.; Gomez, A.N.; Kaiser, Ł.; Polosukhin, I. Attention is all you need. arXiv 2017. [Google Scholar] [CrossRef]
- Cohen, N.; Klein, I. Adaptive Kalman-Informed Transformer. Eng. Appl. Artif. Intell. 2025, 146, 110221. [Google Scholar] [CrossRef]
- Jia, T.; Liu, H.; Wang, P.; Wang, R.; Gao, C. Sensor Error Calibration and Optimal Geometry Analysis of Calibrators. Signal Process. 2024, 214, 109249. [Google Scholar] [CrossRef]
- Willette, J.; Lee, H.; Lee, Y.; Jeon, M.; Hwang, S.J. Training-Free Exponential Extension of Sliding Window Context with Cascading KV Cache. arXiv 2024, arXiv:2406.17808. [Google Scholar] [CrossRef]
- Zhang, H.; Yang, Z.; Xiong, H.; Zhu, T.; Long, Z.; Wu, W. Transformer aided adaptive extended Kalman filter for autonomous vehicle mass estimation. Processes 2023, 11, 887. [Google Scholar] [CrossRef]
- Agricultural Machinery Information Platform. Official Data Verification Platform for Agricultural Machinery. rom. Available online: https://aminfo.or.kr/ (accessed on 2 July 2025).






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Item | Specifications | ||
|---|---|---|---|
| MT5.73 | MT9.140 | ||
| Length × Width × Height (mm) | 3900 × 1900 × 2780 | 4600 × 2300 × 2930 | |
| Weight (kg) | 3065 | 5330 | |
| Steering System Type | Fully Hydraulic | Fully Hydraulic | |
| Wheelbase (mm) | 2150 | 2600 | |
| Track Width (mm) | Front Wheel | 1590 | 1890 |
| Rear Wheel | 1435 | 1800 | |
| Tire Specifications | Front Wheel | 11.2–24 8PR | 380/85 R28 |
| Rear Wheel | 16.9–30 8PR | 460/85 R38 | |
| Autonomous Control System | Input Steering Interval (Hz) | 100 | 5 |
| Max. Steering Angle (Degree) | 45 | 37 | |
| GNSS | Sampling Frequency (Hz) | 10 | 50 |
| RTK-GPS Accuracy (mm) | 15 | 20 | |
| Item | Specification |
|---|---|
| Measurement range (mm) | 0.9 m to 3500 m |
| Accuracy (mm) | 1 mm (1.5 PPM) |
| Measurement interval (hz) | 10 |
| Working temperature range (°C) | −20 to +50 |
| Model | 1st Line | 2nd Line | 3rd Line | 4th Line |
|---|---|---|---|---|
| MT5.73 | EKF-AI train | EKF-AI train | Validation (Using raw data) | EKF-AI train |
| MT9.140 | EKF-AI train | Validation (Using raw data) | EKF-AI train | EKF-AI train |
| 1st (0 h) | 2nd (+5 h) | 3rd (+25 h) | ||||
|---|---|---|---|---|---|---|
| Parameters | (a) | (d) | (a) | (d) | (a) | (d) |
| 95% CE (mm) | 32.9 | 30.7 | 52.3 | 23.0 | 35.5 | 13.5 |
| 50% CE (mm) | 21.3 | 19.9 | 44.4 | 16.2 | 27.5 | 6.3 |
| MaxE (mm) | 39.5 | 39.0 | 63.2 | 28.0 | 42.4 | 18.0 |
| ME (mm) | 21.3 | 20.0 | 43.8 | 16.1 | 27.6 | 6.7 |
| SD (mm) | 6.6 | 5.9 | 5.4 | 4.3 | 4.8 | 4.0 |
| Installation Position | Grouped Mean (3 Repeats × 4 Sets) | Total Mean (mm) | Std. Dev. (mm) | |||
|---|---|---|---|---|---|---|
| Trial 1 (mm) | Trial 2 (mm) | Trial 3 (mm) | Trial 4 (mm) | |||
| Cab | 145 | 146 | 146 | 145 | 145 | 0.6 |
| Rear 3-Point | 170 | 158 | 163 | 129 | 155 | 18.0 |
| Comparison (Measurement vs. EKF Results) | MAE (mm) | RMSE (mm) | Max Error (mm) | STD (mm) | ||
|---|---|---|---|---|---|---|
| MT5.73 | Cab | Trial 1 | 0.0039 | 0.0037 | 0.0425 | 0.0046 |
| Trial 2 | 0.0035 | 0.0034 | 0.0254 | 0.0044 | ||
| Trial 3 | 0.0046 | 0.0044 | 0.0330 | 0.0055 | ||
| Rear 3-Point | Trial 1 | 49 | 42 | 276 | 50 | |
| Trial 2 | 39 | 35 | 325 | 45 | ||
| Trial 3 | 47 | 42 | 305 | 52 | ||
| MT9.140 | Cab | Trial 1 | 0.0047 | 0.0037 | 0.0216 | 0.0039 |
| Trial 2 | 0.0045 | 0.0037 | 0.0276 | 0.0040 | ||
| Trial 3 | 0.0038 | 0.0034 | 0.0282 | 0.0041 | ||
| Rear 3-Point | Trial 1 | 195 | 122 | 411 | 65 | |
| Trial 2 | 209 | 131 | 462 | 68 | ||
| Trial 3 | 188 | 133 | 422 | 111 | ||
| Comparison (Predicted vs. Measured) | MAE (mm) | RMSE (mm) | Max Error (mm) | STD (mm) | R2 | |
|---|---|---|---|---|---|---|
| (a) | Measure vs. EKF | 2.6 | 1.6 | 12.6 | 3.9 | 0.97 |
| Measure vs. AI | 3.5 | 1.9 | 24.1 | 5.4 | 0.94 | |
| EKF vs. AI | 2.6 | 1.6 | 17.3 | 4.1 | 0.97 | |
| (b) | Measure vs. EKF | 1.9 | 1.4 | 10.1 | 3.0 | 0.96 |
| Measure vs. AI | 2.0 | 1.4 | 10.4 | 2.9 | 0.96 | |
| EKF vs. AI | 1.6 | 1.2 | 9.4 | 2.2 | 0.98 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, E.-K.; Han, T.-H.; Lee, J.-H.; Han, C.-W.; Lim, R.-G. Tracking Accuracy Evaluation of Autonomous Agricultural Tractors via Rear Three-Point Hitch Estimation Using a Hybrid Model of EKF Transformer. Agriculture 2025, 15, 1475. https://doi.org/10.3390/agriculture15141475
Kim E-K, Han T-H, Lee J-H, Han C-W, Lim R-G. Tracking Accuracy Evaluation of Autonomous Agricultural Tractors via Rear Three-Point Hitch Estimation Using a Hybrid Model of EKF Transformer. Agriculture. 2025; 15(14):1475. https://doi.org/10.3390/agriculture15141475
Chicago/Turabian StyleKim, Eun-Kuk, Tae-Ho Han, Jun-Ho Lee, Cheol-Woo Han, and Ryu-Gap Lim. 2025. "Tracking Accuracy Evaluation of Autonomous Agricultural Tractors via Rear Three-Point Hitch Estimation Using a Hybrid Model of EKF Transformer" Agriculture 15, no. 14: 1475. https://doi.org/10.3390/agriculture15141475
APA StyleKim, E.-K., Han, T.-H., Lee, J.-H., Han, C.-W., & Lim, R.-G. (2025). Tracking Accuracy Evaluation of Autonomous Agricultural Tractors via Rear Three-Point Hitch Estimation Using a Hybrid Model of EKF Transformer. Agriculture, 15(14), 1475. https://doi.org/10.3390/agriculture15141475