
ObjectDetection in Agriculture: A Comprehensive Review of Methods, Applications, Challenges, and Future Directions



Abstract
1. Introduction
Scope and Contributions of This Review
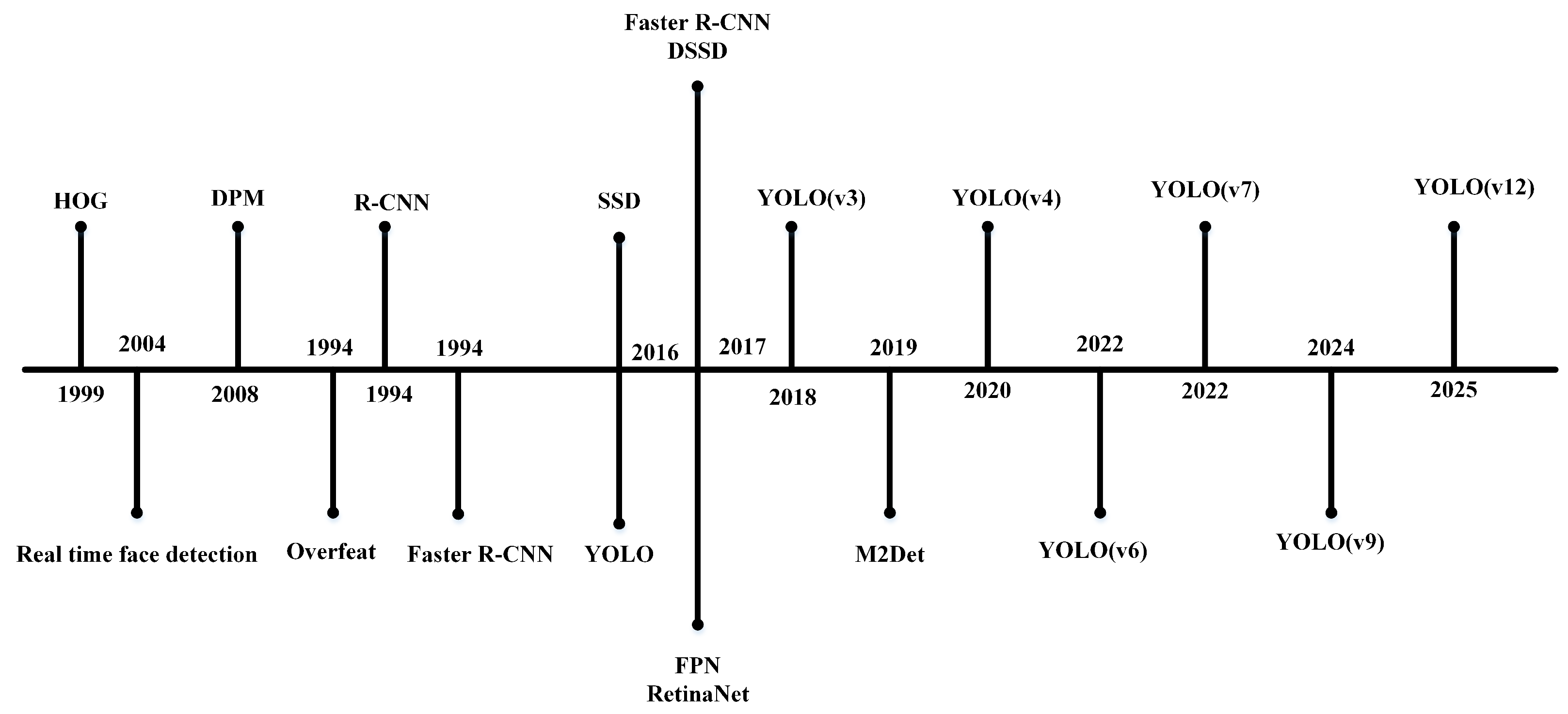
2. Object Detection Fundamentals
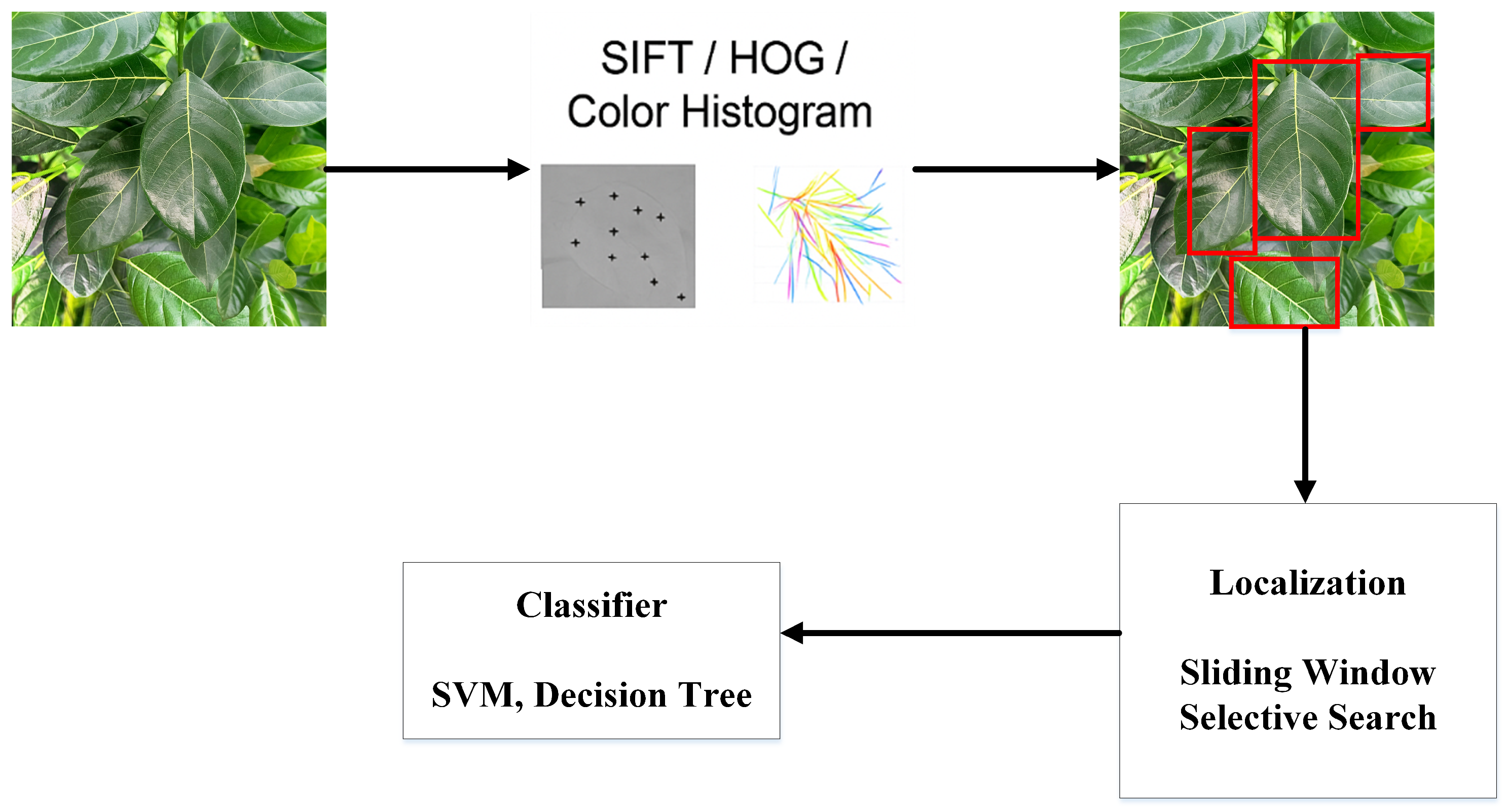
2.1. Traditional Approaches in Agriculture
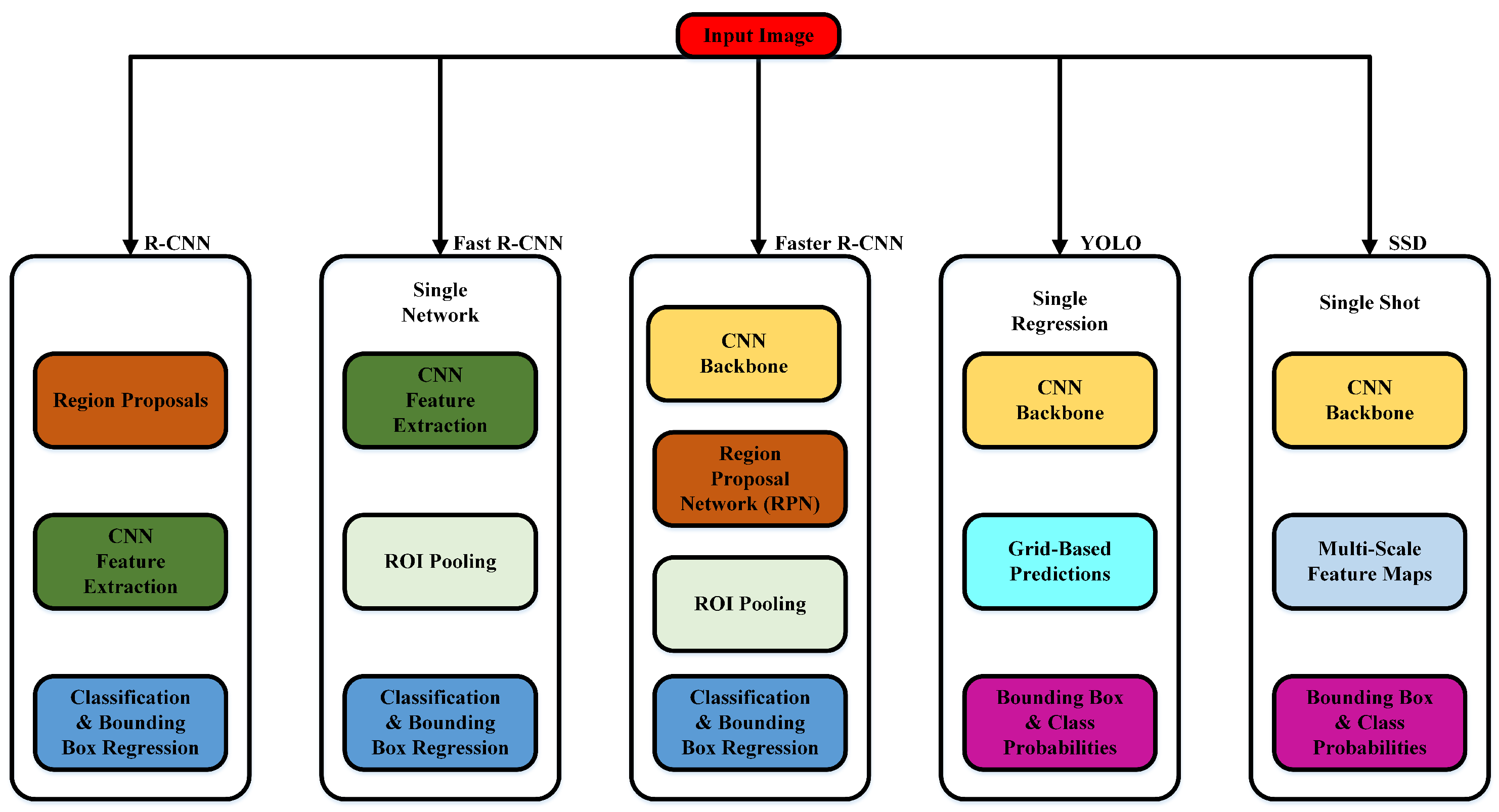
2.2. Deep Learning-Based Methods in Agriculture
2.2.1. R-CNN and Fast R-CNN
2.2.2. Faster R-CNN
2.2.3. YOLO (You Only Look Once)
2.2.4. SSD (Single Shot MultiBox Detector)
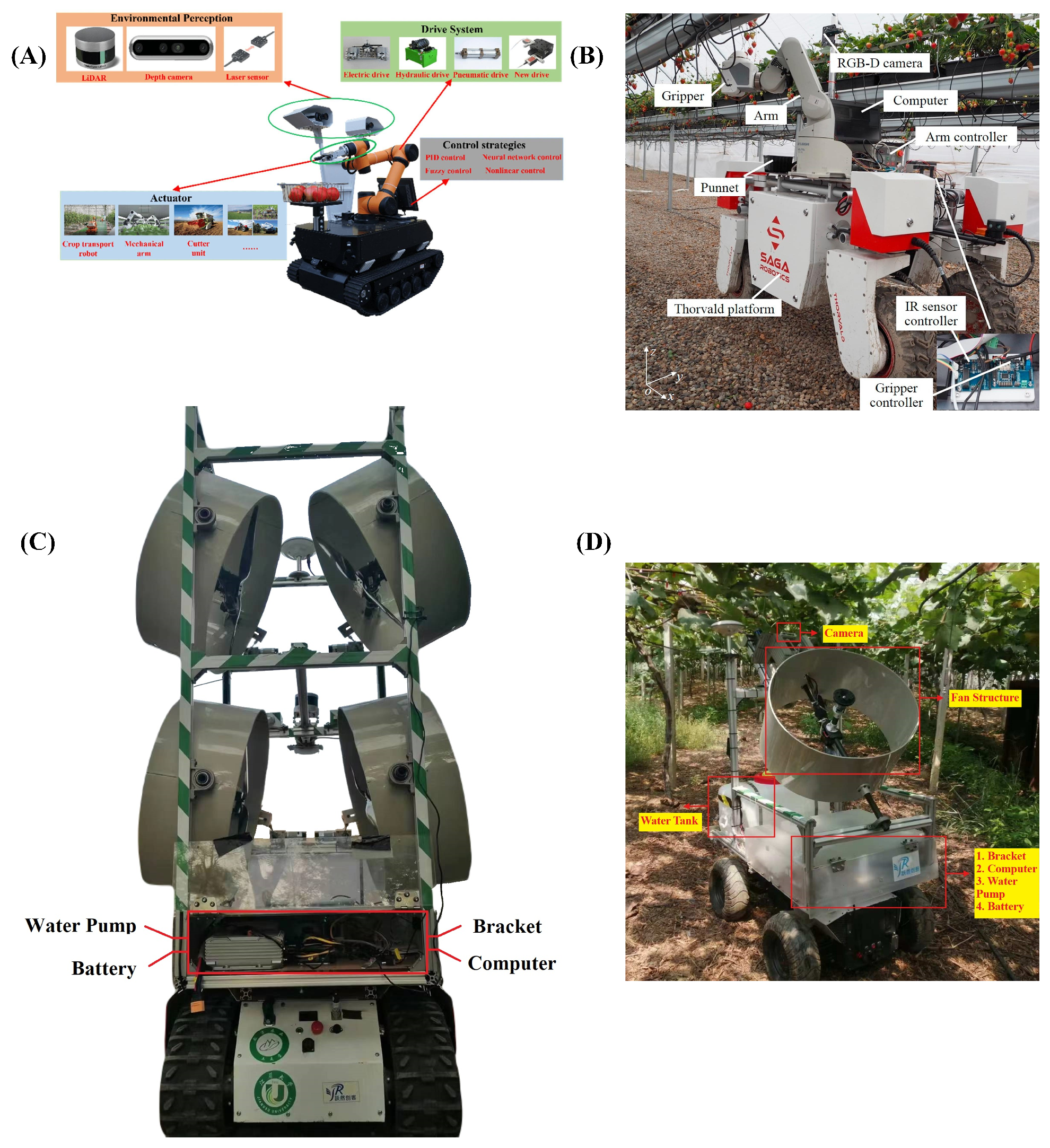
2.3. Agricultural Adaptations
3. Applications in Agriculture
3.1. Weed Detection
3.2. Fruit Counting and Ripeness Detection
3.3. Disease and Pest Detection
3.4. Crop Row and Canopy Detection
4. Dataset Overview
4.1. Key Public Datasets
4.2. Dataset Characteristics and Contributions
4.3. Challenges in Dataset Diversity and Quality
4.4. Implications for Object Detection Research
5. Comparison of Algorithms
5.1. Evaluation Metrics
- Detection Accuracy Metrics.
- Computational Complexity.
5.2. Algorithmic Foundations and Performance
5.2.1. Technical Evaluation and Trade-Offs
5.2.2. Faster R-CNN
5.2.3. YOLO
5.2.4. SSD
5.2.5. EfficientNet
5.3. Comparative Analysis in Agricultural Contexts
5.4. Broader Implications and Trends
6. Challenges and Open Problems
6.1. Environmental Variability
6.2. Model Generalization
6.3. Real-Time Constraints
7. Future Directions
7.1. Explainable AI (XAI)

7.2. Few-Shot and Self-Supervised Learning

7.3. Multimodal Approaches
7.4. Federated Learning

7.5. Edge AI Optimization
7.6. Strategic Recommendations for the Future
7.6.1. Short-Term Recommendations (1–3 Years)
- Deployment of Lightweight Models: Further optimization of compact object detection models, such as YOLOv8 and its lightweight variants, is essential for enabling real-time inference on edge devices. These models must strike a balance between detection accuracy and computational efficiency to support use cases including in-field pest surveillance and mobile crop monitoring [164].
- Synthetic Data Augmentation: The use of generative models—particularly diffusion-based architectures—to synthesize realistic training images offers a promising avenue for addressing data scarcity. Augmenting agricultural datasets such as AgriNet with high-quality synthetic samples can reduce the manual annotation burden while maintaining dataset diversity [92].
7.6.2. Long-Term Recommendations (5+ Years)
- Advanced Multi-Modal Fusion: The integration of heterogeneous data sources, including RGB, thermal, and hyperspectral imagery, represents a robust strategy for mitigating environmental variability and improving model generalization. Developing scalable frameworks capable of real-time, multi-stream fusion remains a long-term research priority [162].
- Real-Time Explainable AI (XAI): While post-hoc interpretability tools such as SHAP and Grad-CAM have gained popularity, their adaptation for real-time deployment in resource-constrained agricultural settings is still limited. Advancing interpretable AI frameworks tailored for field deployment will be critical for increasing user trust and facilitating adoption in practical applications [140].
8. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Alif, M.A.R.; Hussain, M. YOLOv1 to YOLOv10: A comprehensive review of YOLO variants and their application in the agricultural domain. arXiv 2024, arXiv:2406.10139. [Google Scholar]
- Qiu, D.; Guo, T.; Yu, S.; Liu, W.; Li, L.; Sun, Z.; Hu, D. Classification of Apple Color and Deformity Using Machine Vision Combined with CNN. Agriculture 2024, 14, 978. [Google Scholar] [CrossRef]
- Ji, W.; Zhai, K.; Xu, B.; Wu, J. Green Apple Detection Method Based on Multidimensional Feature Extraction Network Model and Transformer Module. J. Food Prot. 2025, 88, 100397. [Google Scholar] [CrossRef] [PubMed]
- Suganthi, S.U.; Prinslin, L.; Selvi, R.; Prabha, R. Generative AI in Agri: Sustainability in Smart Precision Farming Yield Prediction Mapping System Based on GIS Using Deep Learning and GPS. Procedia Comput. Sci. 2025, 252, 365–380. [Google Scholar]
- Zhou, Z.; Majeed, Y.; Naranjo, G.D.; Gambacorta, E.M. Assessment for crop water stress with infrared thermal imagery in precision agriculture: A review and future prospects for deep learning applications. Comput. Electron. Agric. 2021, 182, 106019. [Google Scholar] [CrossRef]
- Wang, H.; Li, J.; Dong, H. A Review of Vision-Based Multi-Task Perception Research Methods for Autonomous Vehicles. Sensors 2025, 25, 2611. [Google Scholar] [CrossRef]
- Wang, H.; Gu, J.; Wang, M. A review on the application of computer vision and machine learning in the tea industry. Front. Sustain. Food Syst. 2023, 7, 1172543. [Google Scholar] [CrossRef]
- Sun, J.; Cong, S.; Mao, H.; Wu, X.; Yang, N. Quantitative Detection of Mixed Pesticide Residue of Lettuce Leaves Based on Hyperspectral Technique. J. Food Process Eng. 2018, 41, e12654. [Google Scholar] [CrossRef]
- Wu, M.; Sun, J.; Lu, B.; Ge, X.; Zhou, X.; Zou, M. Application of Deep Brief Network in Transmission Spectroscopy Detection of Pesticide Residues in Lettuce Leaves. J. Food Process Eng. 2019, 42, e13005. [Google Scholar] [CrossRef]
- Sun, J.; Ge, X.; Wu, X.; Dai, C.; Yang, N. Identification of Pesticide Residues in Lettuce Leaves Based on Near Infrared Transmission Spectroscopy. J. Food Process Eng. 2018, 41, e12816. [Google Scholar] [CrossRef]
- Sharma, A.; Jain, A.; Gupta, P.; Chowdary, V. Machine learning applications for precision agriculture: A comprehensive review. IEEE Access 2020, 9, 4843–4873. [Google Scholar] [CrossRef]
- Akhter, R.; Sofi, S.A. Precision agriculture using IoT data analytics and machine learning. J. King Saud Univ. Comput. Inf. Sci. 2022, 34, 5602–5618. [Google Scholar] [CrossRef]
- Zhao, H.; Tang, Z.; Li, Z.; Dong, Y.; Si, Y.; Lu, M.; Panoutsos, G. Real-time object detection and robotic manipulation for agriculture using a YOLO-based learning approach. In Proceedings of the 2024 IEEE International Conference on Industrial Technology (ICIT), Bristol, UK, 25–27 March 2024; pp. 1–6. [Google Scholar]
- Kashyap, P.K.; Kumar, S.; Jaiswal, A.; Prasad, M.; Gandomi, A.H. Towards precision agriculture: IoT-enabled intelligent irrigation systems using deep learning neural network. IEEE Sens. J. 2021, 21, 17479–17491. [Google Scholar] [CrossRef]
- Zhang, F.; Chen, Z.; Ali, S.; Yang, N.; Fu, S.; Zhang, Y. Multi-class detection of cherry tomatoes using improved YOLOv4-Tiny. Int. J. Agric. Biol. Eng. 2023, 16, 225–231. [Google Scholar] [CrossRef]
- Zhou, X.; Sun, J.; Tian, Y.; Lu, B.; Hang, Y.; Chen, Q. Hyperspectral technique combined with deep learning algorithm for detection of compound heavy metals in lettuce. Food Chem. 2020, 321, 126503. [Google Scholar] [CrossRef]
- Sabir, R.M.; Mehmood, K.; Sarwar, A.; Safdar, M.; Muhammad, N.E.; Gul, N.; Akram, H.M.B. Remote Sensing and Precision Agriculture: A Sustainable Future. In Transforming Agricultural Management for a Sustainable Future: Climate Change and Machine Learning Perspectives; Springer Nature: Cham, Switzerland, 2024; pp. 75–103. [Google Scholar] [CrossRef]
- Tao, K.; Wang, A.; Shen, Y.; Lu, Z.; Peng, F.; Wei, X. Peach flower density detection based on an improved CNN incorporating attention mechanism and multi-scale feature fusion. Horticulturae 2022, 8, 904. [Google Scholar] [CrossRef]
- Zheng, Y.Y.; Kong, J.L.; Jin, X.B.; Wang, X.Y.; Su, T.L.; Zuo, M. CropDeep: The crop vision dataset for deep-learning-based classification and detection in precision agriculture. Sensors 2019, 19, 1058. [Google Scholar] [CrossRef] [PubMed]
- Li, Z.; Wang, D.; Zhu, T.; Tao, Y.; Ni, C. Review of deep learning-based methods for non-destructive evaluation of agricultural products. Biosyst. Eng. 2024, 245, 56–83. [Google Scholar] [CrossRef]
- Zhang, C.; Liu, Y.; Zhou, L. Using deep belief network to construct the agricultural information system based on Internet of Things. J. Supercomput. 2019, 75, 5171–5184. [Google Scholar] [CrossRef]
- Hou, Q.; Cheng, M.M.; Hu, X.; Borji, A.; Tu, Z.; Torr, P.H. A novel embedded cross framework for high-resolution salient object detection. IEEE Trans. Image Process. 2021, 30, 1034–1046. [Google Scholar] [CrossRef]
- Xu, Y.; Wang, Y.; Chen, X.; Li, H.; Jia, J. Camera–Radar Fusion with Modality Interaction and Radar Gaussian Expansion for 3D Object Detection. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), New Orleans, LA, USA, 18–24 June 2022; pp. 16314–16323. [Google Scholar] [CrossRef]
- Liu, H.; Chen, X.; Zhang, M. Remote intelligent perception system for multi-object detection in smart agriculture. Inf. Process. Agric. 2023, 10, 321–334. [Google Scholar] [CrossRef]
- Ahmed, S.; Qiu, B.; Ahmad, F.; Kong, C.W.; Xin, H. A State-of-the-Art Analysis of Obstacle Avoidance Methods from the Perspective of an Agricultural Sprayer UAV’s Operation Scenario. Agronomy 2021, 11, 1069. [Google Scholar] [CrossRef]
- Liu, H.; Zhu, H. Evaluation of a Laser Scanning Sensor in Detection of Complex-Shaped Targets for Variable-Rate Sprayer Development. Trans. ASABE 2016, 59, 1181–1192. [Google Scholar]
- Myers, V.I.; Allen, W.A. Electrooptical remote sensing methods as nondestructive testing and measuring techniques in agriculture. Appl. Opt. 1968, 7, 1819–1838. [Google Scholar] [CrossRef] [PubMed]
- Hu, T.; Wang, W.; Gu, J.; Xia, Z.; Zhang, J.; Wang, B. Research on Apple Object Detection and Localization Method Based on Improved YOLOX and RGB-D Images. Agronomy 2023, 13, 1816. [Google Scholar] [CrossRef]
- Xie, D.; Chen, L.; Liu, L.; Chen, L.; Wang, H. Actuators and sensors for application in agricultural robots: A review. Machines 2022, 10, 913. [Google Scholar] [CrossRef]
- Xiong, Y.; Peng, C.; Grimstad, L.; From, P.J.; Isler, V. Development and field evaluation of a strawberry harvesting robot with a cable-driven gripper. Comput. Electron. Agric. 2019, 157, 392–402. [Google Scholar] [CrossRef]
- Khan, Z.; Liu, H.; Shen, Y.; Zeng, X. Deep learning improved YOLOv8 algorithm: Real-time precise instance segmentation of crown region orchard canopies in natural environment. Comput. Electron. Agric. 2024, 224, 109168. [Google Scholar] [CrossRef]
- Khan, Z.; Liu, H.; Shen, Y.; Yang, Z.; Zhang, L.; Yang, F. Optimizing precision agriculture: A real-time detection approach for grape vineyard unhealthy leaves using deep learning improved YOLOv7 with feature extraction capabilities. Comput. Electron. Agric. 2025, 231, 109969. [Google Scholar] [CrossRef]
- Chen, C.; Zhang, P.; Zhang, H.; Dai, J.; Yi, Y.; Zhang, H.; Zhang, Y. Deep Learning on Computational-Resource-Limited Platforms: A Survey. Mob. Inf. Syst. 2020, 2020, 1–19. [Google Scholar] [CrossRef]
- Qin, Y.M.; Tu, Y.H.; Li, T.; Ni, Y.; Wang, R.F.; Wang, H. Deep Learning for Sustainable Agriculture: A Systematic Review on Applications in Lettuce Cultivation. Sustainability 2025, 17, 3190. [Google Scholar] [CrossRef]
- Lv, R.; Hu, J.; Zhang, T.; Chen, X.; Liu, W. Crop-Free-Ridge Navigation Line Recognition Based on the Lightweight Structure Improvement of YOLOv8. Agriculture 2025, 15, 942. [Google Scholar] [CrossRef]
- Joshi, H. Edge-AI for Agriculture: Lightweight Vision Models for Disease Detection in Resource-Limited Settings. arXiv 2024, arXiv:2412.18635. [Google Scholar]
- Wu, T.; Liu, K.; Cheng, M.; Gu, Z.; Guo, W.; Jiao, X. Paddy Field Scale Evapotranspiration Estimation Based on Two-Source Energy Balance Model with Energy Flux Constraints and UAV Multimodal Data. Remote Sens. 2025, 17, 1662. [Google Scholar] [CrossRef]
- Gong, L.; Gao, B.; Sun, Y.; Zhang, W.; Lin, G.; Zhang, Z.; Li, Y.; Liu, C. preciseSLAM: Robust, Real-Time, LiDAR–Inertial–Ultrasonic Tightly-Coupled SLAM With Ultraprecise Positioning for Plant Factories. IEEE Trans. Ind. Inform. 2024, 20, 8818–8827. [Google Scholar] [CrossRef]
- Zhuang, J.; Chen, W.; Guo, B.; Yan, Y. Infrared Weak Target Detection in Dual Images and Dual Areas. Remote Sens. 2024, 16, 3608. [Google Scholar] [CrossRef]
- Liao, H.; Xia, J.; Yang, Z.; Pan, F.; Liu, Z.; Liu, Y. Meta-Learning Based Domain Prior With Application to Optical-ISAR Image Translation. IEEE Trans. Circuits Syst. Video Technol. 2024, 34, 7041–7056. [Google Scholar] [CrossRef]
- Girshick, R.; Donahue, J.; Darrell, T.; Malik, J. Rich feature hierarchies for accurate object detection and semantic segmentation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Columbus, OH, USA, 23–28 June 2014; pp. 580–587. [Google Scholar]
- Girshick, R. Fast R-CNN. In Proceedings of the IEEE International Conference on Computer Vision (ICCV), Santiago, Chile, 7–13 December 2015; pp. 1440–1448. [Google Scholar] [CrossRef]
- Ren, S.; He, K.; Girshick, R.; Sun, J. Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks. In Proceedings of the Advances in Neural Information Processing Systems, Montreal, QC, Canada, 7–12 December 2015; Volume 28. [Google Scholar]
- Liu, W.; Anguelov, D.; Erhan, D.; Szegedy, C.; Reed, S.; Fu, C.Y.; Berg, A.C. SSD: Single Shot MultiBox Detector. In Proceedings of the European Conference on Computer Vision; Springer: Berlin/Heidelberg, Germany, 2016; pp. 21–37. [Google Scholar] [CrossRef]
- Redmon, J.; Divvala, S.; Girshick, R.; Farhadi, A. You Only Look Once: Unified, Real-Time Object Detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016; pp. 779–788. [Google Scholar] [CrossRef]
- Redmon, J.; Farhadi, A. YOLOv3: An Incremental Improvement. arXiv 2018, arXiv:1804.02767. [Google Scholar]
- Wang, C.Y.; Bochkovskiy, A.; Liao, H.Y.M. YOLOv7: Trainable bag-of-freebies sets new state-of-the-art for real-time object detectors. arXiv 2022, arXiv:2207.02696. [Google Scholar]
- Ji, W.; Pan, Y.; Xu, B.; Wang, J. A Real-Time Apple Targets Detection Method for Picking Robot Based on ShufflenetV2-YOLOX. Agriculture 2022, 12, 856. [Google Scholar] [CrossRef]
- Liu, X.; Jia, W.; Ruan, C.; Zhao, D.; Gu, Y.; Chen, W. The recognition of apple fruits in plastic bags based on block classification. Precis. Agric. 2018, 19, 735–749. [Google Scholar] [CrossRef]
- Uijlings, J.R.; van de Sande, K.E.; Gevers, T.; Smeulders, A.W. Selective Search for Object Recognition. Int. J. Comput. Vis. 2013, 104, 154–171. [Google Scholar] [CrossRef]
- Sladojevic, S.; Arsenovic, M.; Anderla, A.; Culibrk, D.; Stefanovic, D. Deep Neural Networks Based Recognition of Plant Diseases by Leaf Image Classification. Comput. Intell. Neurosci. 2016, 2016, 3289801. [Google Scholar] [CrossRef] [PubMed]
- Hossain, S.; Mou, R.M.; Hasan, M.M.; Chakraborty, S.; Razzak, M.A. Recognition and detection of tea leaf’s diseases using support vector machine. In Proceedings of the 2018 IEEE 14th International Colloquium on Signal Processing & Its Applications (CSPA), Penang, Malaysia, 9–10 March 2018; pp. 150–154. [Google Scholar] [CrossRef]
- Tang, L.; Tian, L.; Steward, B.L. Classification of broadleaf and grass weeds using Gabor wavelets and an artificial neural network. Trans. ASAE 2003, 46, 1247–1254. [Google Scholar] [CrossRef]
- Zhu, Y.; Fan, S.; Zuo, M.; Zhang, B.; Zhu, Q.; Kong, J. Discrimination of New and Aged Seeds Based on On-Line Near-Infrared Spectroscopy Technology Combined with Machine Learning. Foods 2024, 13, 1570. [Google Scholar] [CrossRef] [PubMed]
- Jin, X. Development status and trend of agricultural robot technology. Int. J. Agric. Biol. Eng. 2021, 14, 1–14. [Google Scholar] [CrossRef]
- Zhang, Z.; Lu, Y.; Zhao, Y.; Pan, Q.; Jin, K.; Xu, G.; Hu, Y. TS-YOLO: An all-day and lightweight tea canopy shoots detection model. Agronomy 2023, 13, 1411. [Google Scholar] [CrossRef]
- Ge, X.; Sun, J.; Lu, B.; Chen, Q.; Xun, W.; Jin, Y. Classification of Oolong Tea Varieties Based on Hyperspectral Imaging Technology and BOSS-LightGBM Model. J. Food Process Eng. 2019, 42, e13289. [Google Scholar] [CrossRef]
- Deng, L.; Miao, Z.; Zhao, X.; Yang, S.; Gao, Y.; Zhai, C.; Zhao, C. HAD-YOLO: An Accurate and Effective Weed Detection Model Based on Improved YOLOV5 Network. Agronomy 2025, 15, 57. [Google Scholar] [CrossRef]
- Peng, Y.; Zhao, S.; Liu, J. Fused-Deep-Features Based Grape Leaf Disease Diagnosis. Agronomy 2021, 11, 2234. [Google Scholar] [CrossRef]
- Xu, C.; Lu, C.; Piao, J.; Wang, Y.; Zhou, Y.; Li, S. Rice virus release from the planthopper salivary gland is independent of plant tissue recognition by the stylet. Pest Manag. Sci. 2020, 76, 3208–3216. [Google Scholar] [CrossRef] [PubMed]
- Yang, N.; Qian, Y.; EL-Mesery, H.S.; Zhang, R.; Wang, A.; Tang, J. Rapid Detection of Rice Disease Using Microscopy Image Identification Based on the Synergistic Judgment of Texture and Shape Features and Decision Tree–Confusion Matrix Method. J. Sci. Food Agric. 2019, 99, 6589–6600. [Google Scholar] [CrossRef] [PubMed]
- Viveros Escamilla, L.D.; Gómez-Espinosa, A.; Escobedo Cabello, J.A.; Cantoral-Ceballos, J.A. Maturity recognition and fruit counting for sweet peppers in greenhouses using deep learning neural networks. Agriculture 2024, 14, 331. [Google Scholar] [CrossRef]
- Fatima, H.S.; ul Hassan, I.; Hasan, S.; Khurram, M.; Stricker, D.; Afzal, M.Z. Formation of a Lightweight, Deep Learning-Based Weed Detection System for a Commercial Autonomous Laser Weeding Robot. Appl. Sci. 2023, 13, 3997. [Google Scholar] [CrossRef]
- Amjoud, A.B.; Amrouch, M. Object Detection Using Deep Learning, CNNs and Vision Transformers: A Review. IEEE Access 2023, 11, 35479–35516. [Google Scholar] [CrossRef]
- Sun, T.; Zhang, W.; Miao, Z.; Zhang, Z.; Li, N. Object localization methodology in occluded agricultural environments through deep learning and active sensing. Comput. Electron. Agric. 2023, 212, 108141. [Google Scholar] [CrossRef]
- Wang, A.; Liu, L.; Chen, H.; Lin, Z.; Han, J.; Ding, G. YoloE: Real-Time Seeing Anything. arXiv 2025, arXiv:2503.07465. [Google Scholar]
- Olsen, A.; Konovalov, D.A.; Philippa, B.; Ridd, P.; Wood, J.C.; Johns, J.; Banks, W.; Girgenti, B.; Kenny, O.; Whinney, J.; et al. DeepWeeds: A Multiclass Weed Species Image Dataset for Deep Learning. Sci. Rep. 2019, 9, 2058. [Google Scholar] [CrossRef]
- Sun, F.; Lv, Q.; Bian, Y.; He, R.; Lv, D.; Gao, L.; Li, X. Grape Target Detection Method in Orchard Environment Based on Improved YOLOv7. Agronomy 2025, 15, 42. [Google Scholar] [CrossRef]
- Milioto, A.; Lottes, P.; Stachniss, C. Real-time semantic segmentation of crop and weed for precision agriculture robots leveraging background knowledge in CNNs. In Proceedings of the 2018 IEEE International Conference on Robotics and Automation (ICRA), Brisbane, Australia, 21–25 May 2018; pp. 2229–2235. [Google Scholar] [CrossRef]
- Lin, T.Y.; Goyal, P.; Girshick, R.; He, K.; Dollár, P. Focal Loss for Dense Object Detection. In Proceedings of the IEEE International Conference on Computer Vision (ICCV), Venice, Italy, 22–29 October 2017; pp. 2980–2988. [Google Scholar]
- Huang, J.; Rathod, V.; Sun, C.; Zhu, M.; Korattikara, A.; Fathi, A.; Fischer, I.; Wojna, Z.; Song, Y.; Guadarrama, S.; et al. Speed/Accuracy Trade-Offs for Modern Convolutional Object Detectors. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 7310–7311. [Google Scholar] [CrossRef]
- Dandekar, Y.; Shinde, K.; Gangan, J.; Firdausi, S.; Bharne, S. Weed Plant Detection from Agricultural Field Images using YOLOv3 Algorithm. In Proceedings of the 2022 6th International Conference on Computing, Communication, Control and Automation (ICCUBEA), Pune, India, 26–27 August 2022; pp. 1–6. [Google Scholar]
- Moreira, G.; Magalhães, S.A.; Pinho, T.M.; Cunha, M. Evaluating the Single-Shot MultiBox Detector and YOLO Deep Learning Models for the Detection of Tomatoes in a Greenhouse. Sensors 2021, 21, 3569. [Google Scholar] [CrossRef]
- Peng, Y.; Wang, A.; Liu, J.; Faheem, M. A comparative study of semantic segmentation models for identification of grape with different varieties. Agriculture 2021, 11, 997. [Google Scholar] [CrossRef]
- Wang, Y.; Han, Y.; Wang, C.; Song, S.; Tian, Q.; Huang, G. Computation-efficient Deep Learning for Computer Vision: A Survey. arXiv 2024, arXiv:2308.13998. [Google Scholar]
- Ariza-Sentís, M.; Vélez, S.; Martínez-Peña, R.; Baja, H.; Valente, J. Object detection and tracking in Precision Farming: A systematic review. Comput. Electron. Agric. 2024, 219, 108757. [Google Scholar] [CrossRef]
- Duan, Y.; Han, W.; Guo, P.; Wei, X. YOLOv8-GDCI: Research on the Phytophthora Blight Detection Method of Different Parts of Chili Based on Improved YOLOv8 Model. Agronomy 2024, 14, 2734. [Google Scholar] [CrossRef]
- Ma, J.; Li, M.; Fan, W.; Liu, J. State-of-the-Art Techniques for Fruit Maturity Detection. Agronomy 2024, 14, 56. [Google Scholar] [CrossRef]
- Sa, I.; Ge, Z.; Dayoub, F.; Upcroft, B.; Perez, T.; McCool, C. DeepFruits: A fruit detection system using deep neural networks. Sensors 2016, 16, 1222. [Google Scholar] [CrossRef]
- Jia, Z.; Zhang, M.; Yuan, C.; Liu, Q.; Liu, H.; Qiu, X.; Shi, J. ADL-YOLOv8: A Field Crop Weed Detection Model Based on Improved YOLOv8. Agronomy 2024, 14, 2355. [Google Scholar] [CrossRef]
- Zoubek, T.; Bumbálek, R.; Ufitikirezi, J.D.D.M.; Strob, M.; Filip, M.; Špalek, F.; Bartoš, P. Advancing precision agriculture with computer vision: A comparative study of YOLO models for weed and crop recognition. Crop Prot. 2025, 190, 107076. [Google Scholar] [CrossRef]
- Saleem, M.H.; Velayudhan, K.K.; Potgieter, J.; Arif, K.M. Weed Identification by Single-Stage and Two-Stage Neural Networks: A Study on the Impact of Image Resizers and Weights Optimization Algorithms. Front. Plant Sci. 2022, 13, 850666. [Google Scholar] [CrossRef]
- Zhu, W.; Sun, J.; Wang, S.; Shen, J.; Yang, K.; Zhou, X. Identifying Field Crop Diseases Using Transformer-Embedded Convolutional Neural Network. Agriculture 2022, 12, 1083. [Google Scholar] [CrossRef]
- Tang, S.; Xia, Z.; Gu, J.; Wang, W.; Huang, Z.; Zhang, W. High-precision apple recognition and localization method based on RGB-D and improved SOLOv2 instance segmentation. Front. Sustain. Food Syst. 2024, 8, 1403872. [Google Scholar] [CrossRef]
- Shen, L.; Su, J.; Huang, R.; Quan, W.; Song, Y.; Fang, Y.; Su, B. Fusing attention mechanism with Mask R-CNN for instance segmentation of grape cluster in the field. Front. Plant Sci. 2022, 13, 934450. [Google Scholar] [CrossRef] [PubMed]
- Yang, J.; Han, M.; He, J.; Wen, J.; Chen, D.; Wang, Y. Object detection and localization algorithm in agricultural scenes based on YOLOv5. J. Electron. Imaging 2023, 32, 052402. [Google Scholar] [CrossRef]
- Tan, M.; Pang, R.; Le, Q.V. EfficientDet: Scalable and Efficient Object Detection. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Seattle, WA, USA, 13–19 June 2020; pp. 10781–10790. [Google Scholar] [CrossRef]
- Chu, P.; Li, Z.; Zhang, K.; Chen, D.; Lammers, K.; Lu, R. O2RNet: Occluder-Occludee Relational Network for Robust Apple Detection in Clustered Orchard Environments. Smart Agric. Technol. 2023, 5, 100284. [Google Scholar] [CrossRef]
- Sun, J.; He, X.; Ge, X.; Wu, X.; Shen, J.; Song, Y. Detection of Key Organs in Tomato Based on Deep Migration Learning in a Complex Background. Agriculture 2018, 8, 196. [Google Scholar] [CrossRef]
- Wang, A.; Gao, B.; Cao, H.; Wang, P.; Zhang, T.; Wei, X. Early detection of Sclerotinia sclerotiorum on oilseed rape leaves based on optical properties. Biosyst. Eng. 2022, 224, 80–91. [Google Scholar] [CrossRef]
- Jasim, M.; Al-Tuwaijari, A. Detection and identification of plant leaf diseases using YOLOv4. PLoS ONE 2023, 18, e0284567. [Google Scholar] [CrossRef]
- Muhammad, A.; Salman, Z.; Lee, K.; Han, D. Harnessing the power of diffusion models for plant disease image augmentation. Front. Plant Sci. 2023, 14, 1280496. [Google Scholar] [CrossRef]
- Yang, R.; Yu, Y. Artificial convolutional neural network in object detection and semantic segmentation for medical imaging analysis. Front. Oncol. 2021, 11, 638182. [Google Scholar] [CrossRef]
- Pei, H.; Sun, Y.; Huang, H.; Zhang, W.; Sheng, J.; Zhang, Z. Weed detection in maize fields by UAV images based on crop row preprocessing and improved YOLOv4. Agriculture 2022, 12, 975. [Google Scholar] [CrossRef]
- Ding, H.; Zhang, B.; Zhou, J.; Yan, Y.; Tian, G.; Gu, B. Recent developments and applications of simultaneous localization and mapping in agriculture. J. Field Robot. 2022, 39, 956–983. [Google Scholar] [CrossRef]
- Pang, Y.; Shi, Y.; Gao, S.; Jiang, F.; Veeranampalayam-Sivakumar, A.N.; Thompson, L.; Luck, J.; Liu, C. Improved crop row detection with deep neural network for early-season maize stand count in UAV imagery. Comput. Electron. Agric. 2020, 178, 105766. [Google Scholar] [CrossRef]
- Milioto, A.; Lottes, P.; Stachniss, C. Real-time blob-wise sugar beets vs. weeds classification for monitoring fields using convolutional neural networks. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2017, 4, 41–48. [Google Scholar] [CrossRef]
- Chiu, M.T.; Xu, X.; Wei, Y.; Huang, Z.; Schwing, A.G.; Brunner, R.; Khachatrian, H.; Karapetyan, H.; Dozier, I.; Rose, G.; et al. Agriculture-Vision: A Large Aerial Image Database for Agricultural Pattern Analysis. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Seattle, WA, USA, 13–19 June 2020; pp. 2828–2838. [Google Scholar] [CrossRef]
- Lu, Y.; Young, S. A survey of public datasets for computer vision tasks in precision agriculture. Comput. Electron. Agric. 2020, 178, 105760. [Google Scholar] [CrossRef]
- Liu, J.; Abbas, I.; Noor, R.S. Development of Deep Learning-Based Variable Rate Agrochemical Spraying System for Targeted Weeds Control in Strawberry Crop. Agronomy 2021, 11, 1480. [Google Scholar] [CrossRef]
- Zhang, X.; Li, H.; Sun, S.; Zhang, W.; Shi, F.; Zhang, R.; Liu, Q. Classification and identification of apple leaf diseases and insect pests based on improved ResNet-50 model. Horticulturae 2023, 9, 1046. [Google Scholar] [CrossRef]
- Al Sahili, Z.; Awad, M. The Power of Transfer Learning in Agricultural Applications: AgriNet. Front. Plant Sci. 2022, 13, 992700. [Google Scholar] [CrossRef]
- Garcin, C.; Joly, A.; Bonnet, P.; Lombardo, J.C.; Affouard, A.; Chouet, M.; Servajean, M.; Lorieul, T.; Salmon, J. Pl@ntNet-300K: A plant image dataset with high label ambiguity and a long-tailed distribution. In Proceedings of the NeurIPS Datasets and Benchmarks 2021, Online, 6–14 December 2021. [Google Scholar]
- Hughes, D.P.; Salathé, M. An open access repository of images on plant health to enable the development of mobile disease diagnostics. arXiv 2015, arXiv:1511.08060. [Google Scholar]
- Rahnemoonfar, M.; Sheppard, C. Deep count: Fruit counting based on deep simulated learning. Sensors 2017, 17, 905. [Google Scholar] [CrossRef]
- Lu, D.; Wang, Y. MAR-YOLOv9: A Multi-Dataset Object Detection Method for Agricultural Fields Based on YOLOv9. PLoS ONE 2024, 19, e0307643. [Google Scholar] [CrossRef]
- Noyan, M.A. Uncovering Bias in the PlantVillage Dataset. arXiv 2022, arXiv:2206.04374. [Google Scholar] [CrossRef]
- Li, T.; Feng, Q.; Qiu, Q.; Xie, F.; Zhao, C. Occluded Apple Fruit Detection and Localization with a Frustum-Based Point-Cloud-Processing Approach for Robotic Harvesting. Remote Sens. 2022, 14, 482. [Google Scholar] [CrossRef]
- Cravero, A.; Pardo, S.; Sepúlveda, S.; Muñoz, L. Challenges to Use Machine Learning in Agricultural Big Data: A Systematic Literature Review. Agronomy 2022, 12, 748. [Google Scholar] [CrossRef]
- Rufin, P.; Wang, S.; Lisboa, S.N.; Hemmerling, J.; Tulbure, M.G.; Meyfroidt, P. Taking it further: Leveraging pseudo-labels for field delineation across label-scarce smallholder regions. Int. J. Appl. Earth Obs. Geoinf. 2024, 134, 104149. [Google Scholar] [CrossRef]
- Li, L.; Xie, S.; Ning, J.; Chen, Q.; Zhang, Z. Evaluating green tea quality based on multisensor data fusion combining hyperspectral imaging and olfactory visualization systems. J. Sci. Food Agric. 2019, 99, 1787–1794. [Google Scholar] [CrossRef] [PubMed]
- Schuhmann, C.; Beaumont, R.; Vencu, R.; Gordon, C.; Wightman, R.; Cherti, M.; Coombes, T.; Katta, A.; Mullis, C.; Wortsman, M.; et al. LAION-5B: An open large-scale dataset for training next generation image-text models. Adv. Neural Inf. Process. Syst. 2022, 35, 25278–25294. [Google Scholar]
- Li, A.; Wang, C.; Ji, T.; Wang, Q.; Zhang, T. D3-YOLOv10: Improved YOLOv10-Based Lightweight Tomato Detection Algorithm Under Facility Scenario. Agriculture 2024, 14, 2268. [Google Scholar] [CrossRef]
- Wang, A.; Chen, H.; Liu, L.; Chen, K.; Lin, Z.; Han, J.; Ding, G. YOLOv10: Real-Time End-to-End Object Detection. arXiv 2024, arXiv:2405.14458. [Google Scholar]
- Tao, T.; Wei, X. STBNA-YOLOv5: An Improved YOLOv5 Network for Weed Detection in Rapeseed Field. Agriculture 2025, 15, 22. [Google Scholar] [CrossRef]
- Liu, S.; Li, Z.; Sun, J. Self-EMD: Self-Supervised Object Detection without ImageNet. arXiv 2020, arXiv:2011.13677. [Google Scholar]
- Gunay, M.; Koseoglu, M. Detection of circuit components on hand-drawn circuit images by using faster R-CNN method. Int. J. Adv. Comput. Sci. Appl. 2021, 12, 1–7. [Google Scholar] [CrossRef]
- Štancel, M.; Hulič, M. An Introduction to Image Classification and Object Detection Using YOLO Detector. In Proceedings of the CEUR Workshop Proceedings, Castiglione della Pescaia, Italy, 16–19 June 2019; Volume 2403, pp. 1–8. [Google Scholar]
- Roboflow. YOLOv5 Is Here: State-of-the-Art Object Detection at 140 FPS. 2020. Available online: https://blog.roboflow.com/yolov5-is-here/ (accessed on 19 May 2025).
- Xu, B.; Cui, X.; Ji, W.; Yuan, H.; Wang, J. Apple Grading Method Design and Implementation for Automatic Grader Based on Improved YOLOv5. Agriculture 2023, 13, 124. [Google Scholar] [CrossRef]
- Zuo, Z.; Gao, S.; Peng, H.; Xue, Y.; Han, L.; Ma, G.; Mao, H. Lightweight Detection of Broccoli Heads in Complex Field Environments Based on LBDC-YOLO. Agronomy 2024, 14, 2359. [Google Scholar] [CrossRef]
- Kulhandjian, H.; Yang, Y.; Amely, N. Design and Implementation of a Smart Agricultural Robot bullDOG (SARDOG). In Proceedings of the 2024 International Conference on Computing, Networking and Communications (ICNC), Hawaii, HL, USA, 19–22 February 2024; pp. 767–771. [Google Scholar]
- Fu, C.Y.; Liu, W.; Ranga, A.; Tyagi, A.; Berg, A.C. DSSD: Deconvolutional Single Shot Detector. arXiv 2017, arXiv:1701.06659. [Google Scholar]
- Zhang, H.; Hong, X.; Zhu, L. Detecting Small Objects in Thermal Images Using Single-Shot Detector. arXiv 2021, arXiv:2108.11101. [Google Scholar] [CrossRef]
- Tan, M.; Le, Q.V. EfficientNet: Rethinking Model Scaling for Convolutional Neural Networks. arXiv 2019, arXiv:1905.11946. [Google Scholar]
- Ultralytics. EfficientDet vs. RTDETRv2: A Technical Comparison for Object Detection. 2023. Available online: https://docs.ultralytics.com/zh/compare/rtdetr-vs-efficientdet/ (accessed on 10 May 2025).
- Wang, Y.; Qin, Y.; Cui, J. Occlusion Robust Wheat Ear Counting Algorithm Based on Deep Learning. Front. Plant Sci. 2021, 12, 645899. [Google Scholar] [CrossRef]
- Guo, J.; Zhang, K.; Adade, S.Y.S.S.; Lin, J.; Lin, H.; Chen, Q. Tea grading, blending, and matching based on computer vision and deep learning. J. Sci. Food Agric. 2025, 105, 3239–3251. [Google Scholar] [CrossRef]
- Rehman, M.M.U.; Liu, J.; Nijabat, A.; Faheem, M.; Wang, W.; Zhao, S. Leveraging Convolutional Neural Networks for Disease Detection in Vegetables: A Comprehensive Review. Agronomy 2024, 14, 2231. [Google Scholar] [CrossRef]
- Wang, A.; Peng, T.; Cao, H.; Xu, Y.; Wei, X.; Cui, B. TIA-YOLOv5: An improved YOLOv5 network for real-time detection of crop and weed in the field. Front. Plant Sci. 2022, 13, 1091655. [Google Scholar] [CrossRef]
- Li, E.; Zhou, Z.; Chen, X. Edge intelligence: On-demand deep learning model co-inference with device-edge synergy. In Proceedings of the 2018 Workshop on Mobile Edge Communications, Budapest Hungary, 20 August 2018; pp. 31–36. [Google Scholar] [CrossRef]
- Grigorescu, S.; Trasnea, B.; Cocias, T.; Macesanu, G. A survey of deep learning techniques for autonomous driving. J. Field Robot. 2020, 37, 362–386. [Google Scholar] [CrossRef]
- Cheng, H.; Zhang, M.; Shi, J.Q. A Survey on Deep Neural Network Pruning: Taxonomy, Comparison, Analysis, and Recommendations. IEEE Trans. Pattern Anal. Mach. Intell. 2024, 46, 10558–10578. [Google Scholar] [CrossRef] [PubMed]
- Zhu, M.; Gupta, S. To Prune, or Not to Prune: Exploring the Efficacy of Pruning for Model Compression. arXiv 2017, arXiv:1710.01878. [Google Scholar] [CrossRef]
- Wang, R.; Liu, L.; Xie, C.; Yang, P.; Li, R.; Zhou, M. AgriPest: A Large-Scale Domain-Specific Benchmark Dataset for Practical Agricultural Pest Detection in the Wild. Sensors 2021, 21, 1601. [Google Scholar] [CrossRef]
- Badgujar, C.M.; Poulose, A.; Gan, H. Agricultural Object Detection with You Look Only Once (YOLO) Algorithm: A Bibliometric and Systematic Literature Review. arXiv 2024, arXiv:2401.10379. [Google Scholar] [CrossRef]
- Shi, Y.; Han, L.; Zhang, X.; Sobeih, T.; Gaiser, T.; Thuy, N.H.; Behrend, D.; Srivastava, A.K.; Halder, K.; Ewert, F. Deep Learning Meets Process-Based Models: A Hybrid Approach to Agricultural Challenges. arXiv 2025, arXiv:2504.16141. [Google Scholar]
- Dong, M.; Yu, H.; Sun, Z.; Zhang, L.; Sui, Y.; Zhao, R. Research on Agricultural Environmental Monitoring Internet of Things Based on Edge Computing and Deep Learning. J. Intell. Syst. 2024, 33, 20230114. [Google Scholar] [CrossRef]
- Memon, M.S.; Chen, S.; Shen, B.; Liang, R.; Tang, Z.; Wang, S.; Memon, N. Automatic visual recognition, detection and classification of weeds in cotton fields based on machine vision. Crop Prot. 2025, 187, 106966. [Google Scholar] [CrossRef]
- Bhattacharya, A. Applied Machine Learning Explainability Techniques: Make ML Models Explainable and Trustworthy for Practical Applications Using LIME, SHAP, and More; Packt Publishing Ltd.: Birmingham, UK, 2022. [Google Scholar]
- Wang, T.s.; Kim, G.T.; Shin, J.; Jang, S.W. Hierarchical Image Quality Improvement Based on Illumination, Resolution, and Noise Factors for Improving Object Detection. Electronics 2024, 13, 4438. [Google Scholar] [CrossRef]
- Li, Z.; Xiang, J.; Duan, J. A low illumination target detection method based on a dynamic gradient gain allocation strategy. Sci. Rep. 2024, 14, 29058. [Google Scholar] [CrossRef]
- Beldek, C.; Cunningham, J.; Aydin, M.; Sariyildiz, E.; Phung, S.L.; Alici, G. Sensing-based Robustness Challenges in Agricultural Robotic Harvesting. arXiv 2025, arXiv:2502.12403. [Google Scholar]
- Lyu, Z.; Jin, H.; Zhen, T.; Sun, F.; Xu, H. Small object recognition algorithm of grain pests based on SSD feature fusion. IEEE Access 2021, 9, 43202–43213. [Google Scholar] [CrossRef]
- Silwal, A.; Parhar, T.; Yandun, F.; Kantor, G. A Robust Illumination-Invariant Camera System for Agricultural Applications. arXiv 2021, arXiv:2101.02190. [Google Scholar]
- Bargoti, S.; Underwood, J. Deep Fruit Detection in Orchards. arXiv 2016, arXiv:1610.03677. [Google Scholar]
- Liu, S.; Peng, D.; Zhang, B.; Chen, Z.; Yu, L.; Chen, J.; Yang, S. The Accuracy of Winter Wheat Identification at Different Growth Stages Using Remote Sensing. Remote Sens. 2022, 14, 893. [Google Scholar] [CrossRef]
- Kamath, U.; Liu, J.; Whitaker, J. Transfer Learning: Domain Adaptation. In Deep Learning for NLP and Speech Recognition; Springer: Berlin/Heidelberg, Germany, 2019; pp. 495–535. [Google Scholar] [CrossRef]
- Kamilaris, A.; Prenafeta-Boldú, F.X. Deep learning in agriculture: A survey. Comput. Electron. Agric. 2018, 147, 70–90. [Google Scholar] [CrossRef]
- Migneco, P. Traffic Sign Recognition Algorithm: A Deep Comparison Between YOLOv5 and SSD Mobilenet. Doctoral Dissertation, Politecnico di Torino, Torino, Italy, 2024. [Google Scholar]
- Albahar, M. A survey on deep learning and its impact on agriculture: Challenges and opportunities. Agriculture 2023, 13, 540. [Google Scholar] [CrossRef]
- Vincent, D.R.; Deepa, N.; Elavarasan, D.; Srinivasan, K.; Chauhdary, S.H.; Iwendi, C. Sensors driven AI-based agriculture recommendation model for assessing land suitability. Sensors 2019, 19, 3667. [Google Scholar] [CrossRef]
- Yang, J.; Guo, X.; Li, Y.; Marinello, F.; Ercisli, S.; Zhang, Z. A survey of few-shot learning in smart agriculture: Developments, applications, and challenges. Plant Methods 2022, 18, 1–15. [Google Scholar] [CrossRef]
- Dhanya, V.; Subeesh, A.; Kushwaha, N.; Vishwakarma, D.; Kumar, T.; Ritika, G.; Singh, A. Deep learning based computer vision approaches for smart agricultural applications. Artif. Intell. Agric. 2022, 6, 211–229. [Google Scholar] [CrossRef]
- Hrast Essenfelder, A.; Toreti, A.; Seguini, L. Expert-driven explainable artificial intelligence models can detect multiple climate hazards relevant for agriculture. Commun. Earth Environ. 2025, 6, 207. [Google Scholar] [CrossRef]
- Guo, Y.; Gao, J.; Tunio, M.H.; Wang, L. Study on the Identification of Mildew Disease of Cuttings at the Base of Mulberry Cuttings by Aeroponics Rapid Propagation Based on a BP Neural Network. Agronomy 2022, 13, 106. [Google Scholar] [CrossRef]
- Kawakura, S.; Hirafuji, M.; Ninomiya, S.; Shibasaki, R. Adaptations of Explainable Artificial Intelligence (XAI) to Agricultural Data Models with ELI5, PDPbox, and Skater using Diverse Agricultural Worker Data. Eur. J. Artif. Intell. 2022, 3, 14. [Google Scholar] [CrossRef]
- Dara, R.; Hazrati Fard, S.M.; Kaur, J. Recommendations for ethical and responsible use of artificial intelligence in digital agriculture. Front. Artif. Intell. 2022, 5, 884192. [Google Scholar] [CrossRef]
- Shen, Y.; Khan, Z.; Liu, H.; Yang, Z.; Hussain, I. YOLO Optimization for Small Object Detection: DyFAM, EFRAdaptiveBlock, and Bayesian Tuning in Precision Agriculture. SSRN Electron. J. 2025, early stage. [Google Scholar] [CrossRef]
- Liu, H.; Zeng, X.; Shen, Y.; Xu, J.; Khan, Z. A Single-Stage Navigation Path Extraction Network for agricultural robots in orchards. Comput. Electron. Agric. 2025, 229, 109687. [Google Scholar] [CrossRef]
- Xiang, W.; Wu, D.; Wang, J. Enhancing stem localization in precision agriculture: A Two-Stage approach combining YOLOv5 with EffiStemNet. Comput. Electron. Agric. 2025, 231, 109914. [Google Scholar] [CrossRef]
- Coulibaly, S.; Kamsu-Foguem, B.; Kamissoko, D.; Traore, D. Deep learning for precision agriculture: A bibliometric analysis. Intell. Syst. Appl. 2022, 16, 200102. [Google Scholar] [CrossRef]
- Sun, X.; Wang, B.; Wang, Z.; Fu, K. Research Progress on Few-Shot Learning for Remote Sensing Image Interpretation. Remote Sens. 2021, 13, 678. [Google Scholar] [CrossRef]
- Chen, Z.; Feng, J.; Yang, Z.; Wang, Y.; Ren, M. YOLOv8-ACCW: Lightweight grape leaf disease detection method based on improved YOLOv8. IEEE Access 2024, 12, 123595–123608. [Google Scholar] [CrossRef]
- Chen, J.W.; Lin, W.J.; Cheng, H.J.; Hung, C.L.; Lin, C.Y.; Chen, S.P. A smartphone-based application for scale pest detection using multiple-object detection methods. Electronics 2021, 10, 372. [Google Scholar] [CrossRef]
- Almasri, F.; Debeir, O. Multimodal Sensor Fusion in Single Thermal Image Super-Resolution. In Proceedings of the Computer Vision—ACCV 2018 Workshops, Perth, Australia, 2–6 December 2018; Springer: Berlin/Heidelberg, Germany, 2019; pp. 418–433. [Google Scholar] [CrossRef]
- Padhiary, M.; Hoque, A.; Prasad, G.; Kumar, K.; Sahu, B. Precision Agriculture and AI-Driven Resource Optimization for Sustainable Land and Resource Management. In Smart Water Technology for Sustainable Management in Modern Cities; IGI Global: Hershey, PA, USA, 2025; pp. 197–232. [Google Scholar]
- Zhao, S.; Peng, Y.; Liu, J.; Wu, S. Tomato Leaf Disease Diagnosis Based on Improved Convolution Neural Network by Attention Module. Agriculture 2021, 11, 651. [Google Scholar] [CrossRef]
- Shen, Y.; Yang, Z.; Khan, Z.; Liu, H.; Chen, W.; Duan, S. Optimization of Improved YOLOv8 for Precision Tomato Leaf Disease Detection in Sustainable Agriculture. Sensors 2025, 25, 1398. [Google Scholar] [CrossRef] [PubMed]
- Dhanya, K.; Gopal, P.; Srinivasan, V. Deep learning in agriculture: Challenges and future directions. Artif. Intell. Agric. 2022, 6, 1–11. [Google Scholar]
- Padhiary, M.; Hoque, A.; Prasad, G.; Kumar, K.; Sahu, B. The Convergence of Deep Learning, IoT, Sensors, and Farm Machinery in Agriculture. In Designing Sustainable Internet of Things Solutions for Smart Industries; IGI Global: Hershey, PA, USA, 2025; pp. 109–142. [Google Scholar]
- Zheng, W.; Cao, Y.; Tan, H. Secure sharing of industrial IoT data based on distributed trust management and trusted execution environments: A federated learning approach. Neural Comput. Appl. 2023, 35, 21499–21509. [Google Scholar] [CrossRef]
- Kumar, Y.; Kumar, P. Comparative study of YOLOv8 and YOLO-NAS for agriculture application. In Proceedings of the 2024 11th International Conference on Signal Processing and Integrated Networks (SPIN), Noida, India, 21–22 March 2024; pp. 72–77. [Google Scholar]
- Padhiary, M.; Kumar, R. Enhancing Agriculture Through AI Vision and Machine Learning: The Evolution of Smart Farming. In Advancements in Intelligent Process Automation; IGI Global: Hershey, PA, USA, 2025; pp. 295–324. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model | Year | Key Features |
|---|---|---|
| R-CNN | 2014 | Region proposals + CNN classification [41] |
| Fast R-CNN | 2015 | ROI pooling, faster training [42] |
| Faster R-CNN | 2015 | Integrated RPN for proposal generation [43] |
| SSD | 2016 | Multi-box detection with multiple feature maps [44] |
| YOLOv1 | 2016 | Unified detection and classification [45] |
| YOLOv3 | 2018 | Multi-scale prediction, Darknet-53 [46] |
| YOLOv7 | 2022 | E-ELAN optimization, fast and accurate [47] |
| Model | Year | Task | mAP (%) | FPS | GFLOPs | Refs. |
|---|---|---|---|---|---|---|
| Faster R-CNN | 2015 | Fruit Counting | 92.0 | 5–10 | 120 | [43,71] |
| YOLOv3 | 2018 | Weed Detection | 88.7 | 25 | 65 | [67,72] |
| YOLOv7 | 2022 | Pest Detection | 94.1 | 40 | 35 | [32,68] |
| SSD | 2016 | Crop Row Detection | 85.4 | 30–40 | 50 | [44,73] |
| Task | Application Example | Reference | Algorithmic Contribution |
|---|---|---|---|
| Disease Detection | YOLOv7 for grapevine powdery mildew detection | [68] | Improved YOLOv7 with backbone pruning and feature enhancement for orchard environments |
| Disease Detection | RetinaNet for multi-crop disease classification | [77] | YOLOv8-GDCI with global detail-context interaction for detecting small objects in plant parts |
| Fruit Counting | YOLOv5 applied to apple counting | [78] | Reviewed deep learning maturity detection techniques including object-level fruit analysis |
| Fruit Counting | SSD for citrus fruit detection in orchards | [79] | Developed SSD-based detection with real-time capability using multispectral image fusion |
| Weed Detection | DeepWeeds dataset classification using YOLOv3 | [67] | Introduced multiclass weed dataset; evaluated YOLOv3 under real-world conditions |
| Weed Detection | Improved YOLOv8 for weed detection in crop field | [80] | Enhanced YOLOv8 with attention-guided dual-layer feature fusion for dense weed clusters |
| Spraying Robotics | Precision pesticide application in vineyards | [32] | YOLOv7 improved with custom feature extractors targeting grape leaf health conditions |
| Spraying Robotics | Precision pesticide application in orchards | [31] | Real-time instance segmentation of canopies using refined YOLOv8 architecture |
| Dataset | Images | Crop/Weed Types | Notes |
|---|---|---|---|
| PlantVillage | 50,000+ | 38 crop-disease pairs | Controlled lab images [104] |
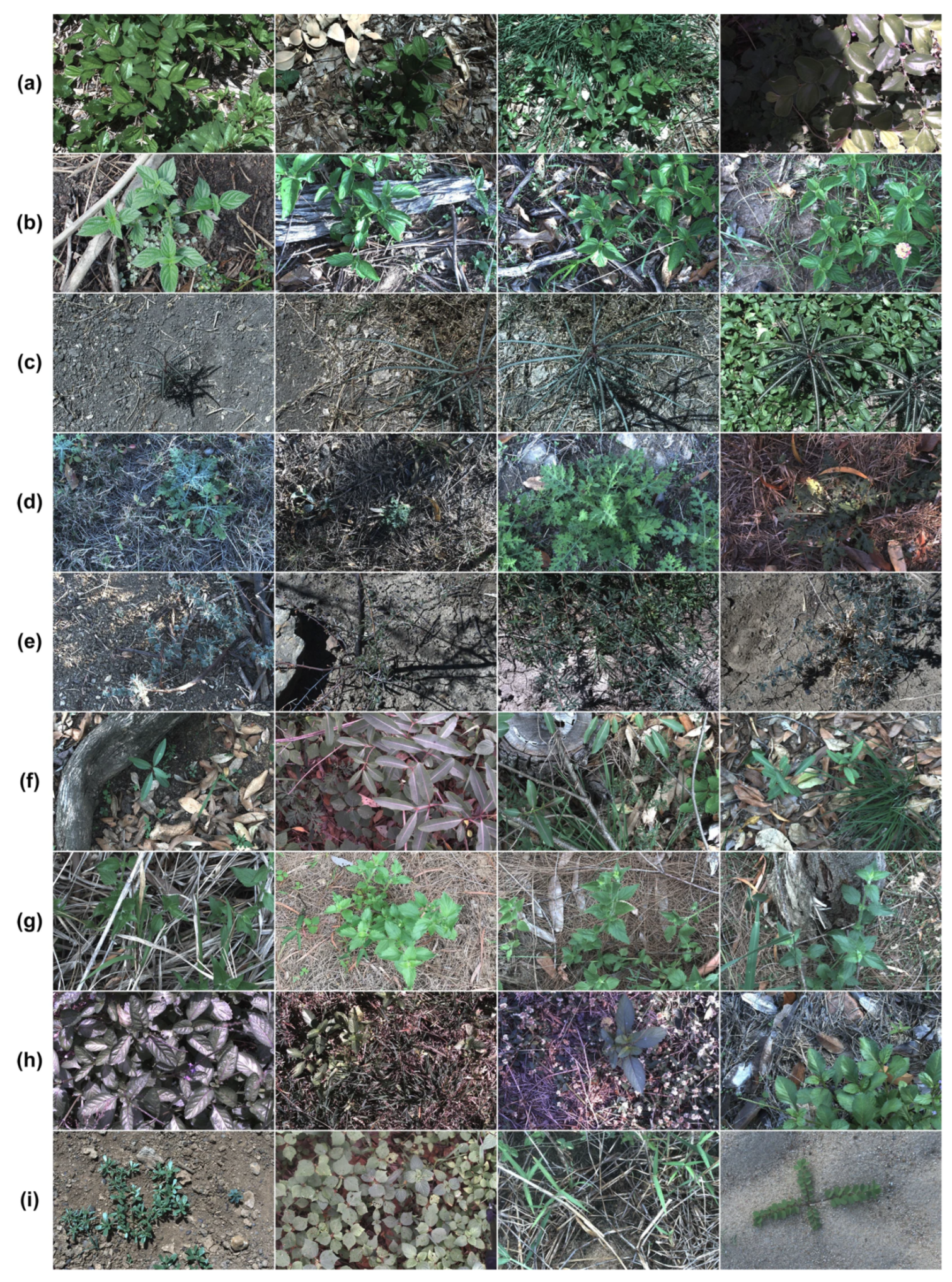
| DeepWeeds | 17,509 | 9 weed species | Field conditions, weeds in Australia [67] |
| GrapeLeaf Dataset | 5000+ | Grapevine diseases | Grape disease segmentation [68] |
| DeepFruit | 35,000+ | Apple, mango, citrus | Fruit detection for yield estimation [105] |
| Model | Architecture | FPS | mAP(%) | GFLOPs | Agricultural Relevance |
|---|---|---|---|---|---|
| Faster R-CNN | Two-stage | 5–10 | 0.90–0.92 | 120 | High-precision disease detection [43] |
| YOLOv5 | One-stage | 50+ | 0.87–0.89 | 25 | Real-time weed detection [68] |
| SSD | One-stage | 30–40 | 0.78–0.82 | 50 | Lightweight fruit detection [44] |
| EfficientNet | One-stage | 30–50 | 0.90–0.91 | 40 | Versatile crop row mapping [87] |
| RetinaNet | One-stage | 20–30 | 0.85–0.88 | 60 | Rare disease detection [70] |
| YOLOv8 | One-stage | 25–30 | 0.93–0.94 | 35 | Real-time orchard spray [31] |
| Challenge | Proposed Solution | Research Gap |
|---|---|---|
| Tiny Object Detection | Focal Loss [70] | Limited multi-scale feature fusion |
| Domain Shift | Domain adaptation [92] | Cross-regional dataset biases |
| Limited Labeled Data | Synthetic data generation [93] | Quality of synthetic annotations |
| Explainability | Grad-CAM, SHAP [140] | Real-time explanation tools |
| Lighting Variations | Multi-modal sensing [90] | Real-time fusion overhead |
| Real-Time Deployment | Model pruning [91] | Accuracy-efficiency trade-offs |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Khan, Z.; Shen, Y.; Liu, H. ObjectDetection in Agriculture: A Comprehensive Review of Methods, Applications, Challenges, and Future Directions. Agriculture 2025, 15, 1351. https://doi.org/10.3390/agriculture15131351
Khan Z, Shen Y, Liu H. ObjectDetection in Agriculture: A Comprehensive Review of Methods, Applications, Challenges, and Future Directions. Agriculture. 2025; 15(13):1351. https://doi.org/10.3390/agriculture15131351
Chicago/Turabian StyleKhan, Zohaib, Yue Shen, and Hui Liu. 2025. "ObjectDetection in Agriculture: A Comprehensive Review of Methods, Applications, Challenges, and Future Directions" Agriculture 15, no. 13: 1351. https://doi.org/10.3390/agriculture15131351
APA StyleKhan, Z., Shen, Y., & Liu, H. (2025). ObjectDetection in Agriculture: A Comprehensive Review of Methods, Applications, Challenges, and Future Directions. Agriculture, 15(13), 1351. https://doi.org/10.3390/agriculture15131351