
Field Evaluation of Different Unmanned Aerial Spraying Systems Applied to Control Panonychus citri in Mountainous Citrus Orchards

 , , , , , and
, , , , , and 
Abstract

1. Introduction
2. Materials and Methods
2.1. Materials
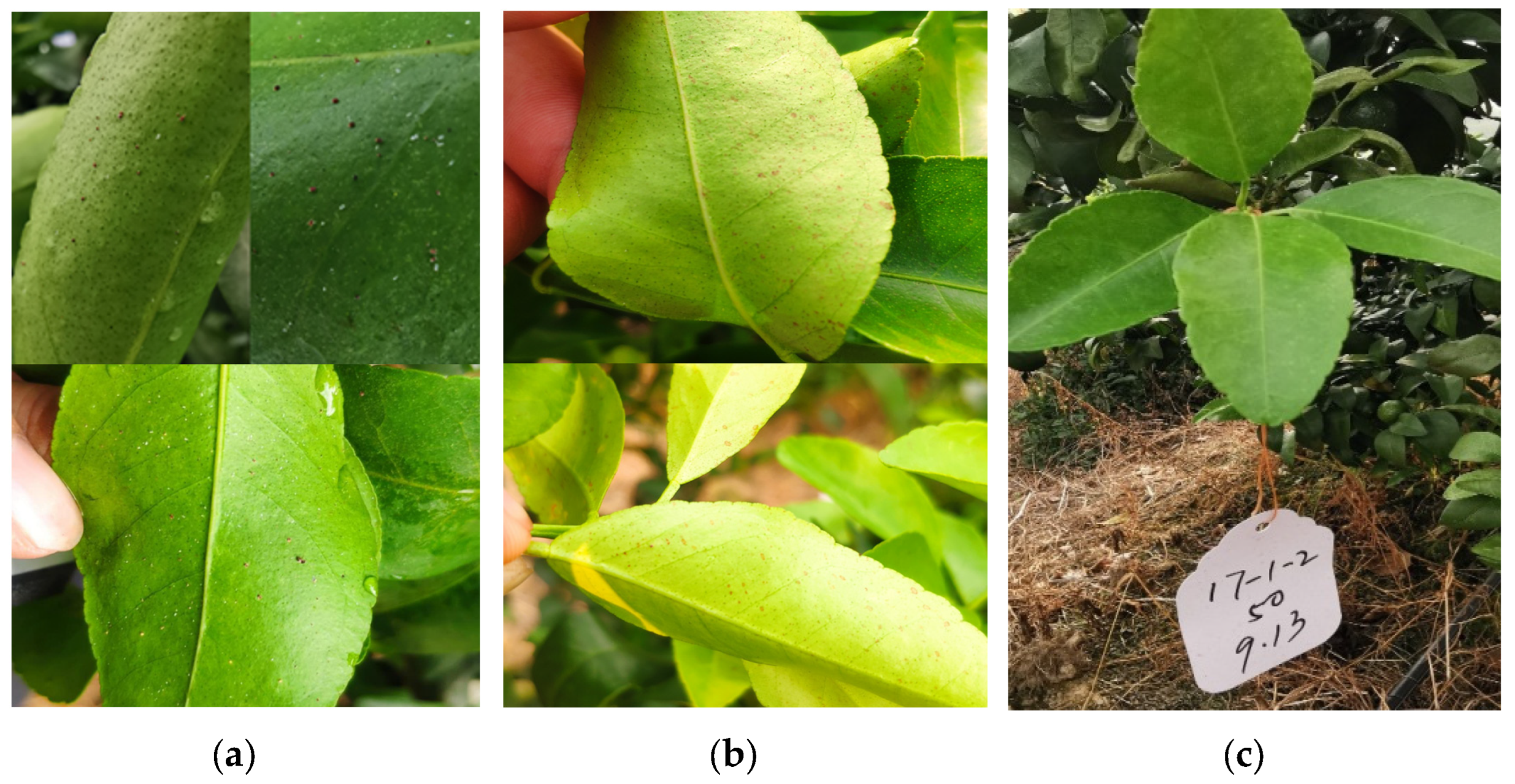
2.1.1. Test Conditions
2.1.2. Experimental Chemicals

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Reagent Type | Name and Specifications | Manufacturer | Application Dosage | Active Ingredient Content (g/ha) |
|---|---|---|---|---|
| pesticides | 45% Bifenazate·Etoxazole SC (45B·E) | Guilin Jiqi Group Co., Ltd., Guilin, Guangxi, China | 1500 mL/ha | 675 |
| 5% Abamectin EC (5AVM) | Hebei Veyong Bio-chemical Co., Ltd., Shijiazhuang, Hebei, China | 1200 mL/ha | 60 | |
| 1.8% Abamectin ME (1.8AVM) | Nanjing Sense Biotechnology Co., Ltd., Nanjing, Jiangsu, China | 1005 g/ha | 18.09 | |
| 5% Abamectin·Etoxazole ME (5A·E) | 1500 g/ha | 75 | ||
| adjuvants | Nongjianfei | Guilin Jiqi Group Co., Ltd., Guilin, China | 120 mL/ha | / |
| Silwet 510 | Momentiveperformance materials (Shanghai) Co., Ltd., Shanghai, China | 600 mL/ha | / | |
| Chengji | Hebei Mingshun Agricultural Technology Co., Ltd., Shijiazhuang, Hebei, China | 600 mL/ha | / | |
| Yimanchu | Chongqing Lingshi Agricultural Technology Co., Ltd., Chongqing, China | 1500 mL/ha | / | |
| tracer agent | Allura Red 85 | Zhejiang Dragoni Colour Technology Co., Ltd., Longgang, Zhejiang, China | 450 g/ha | / |
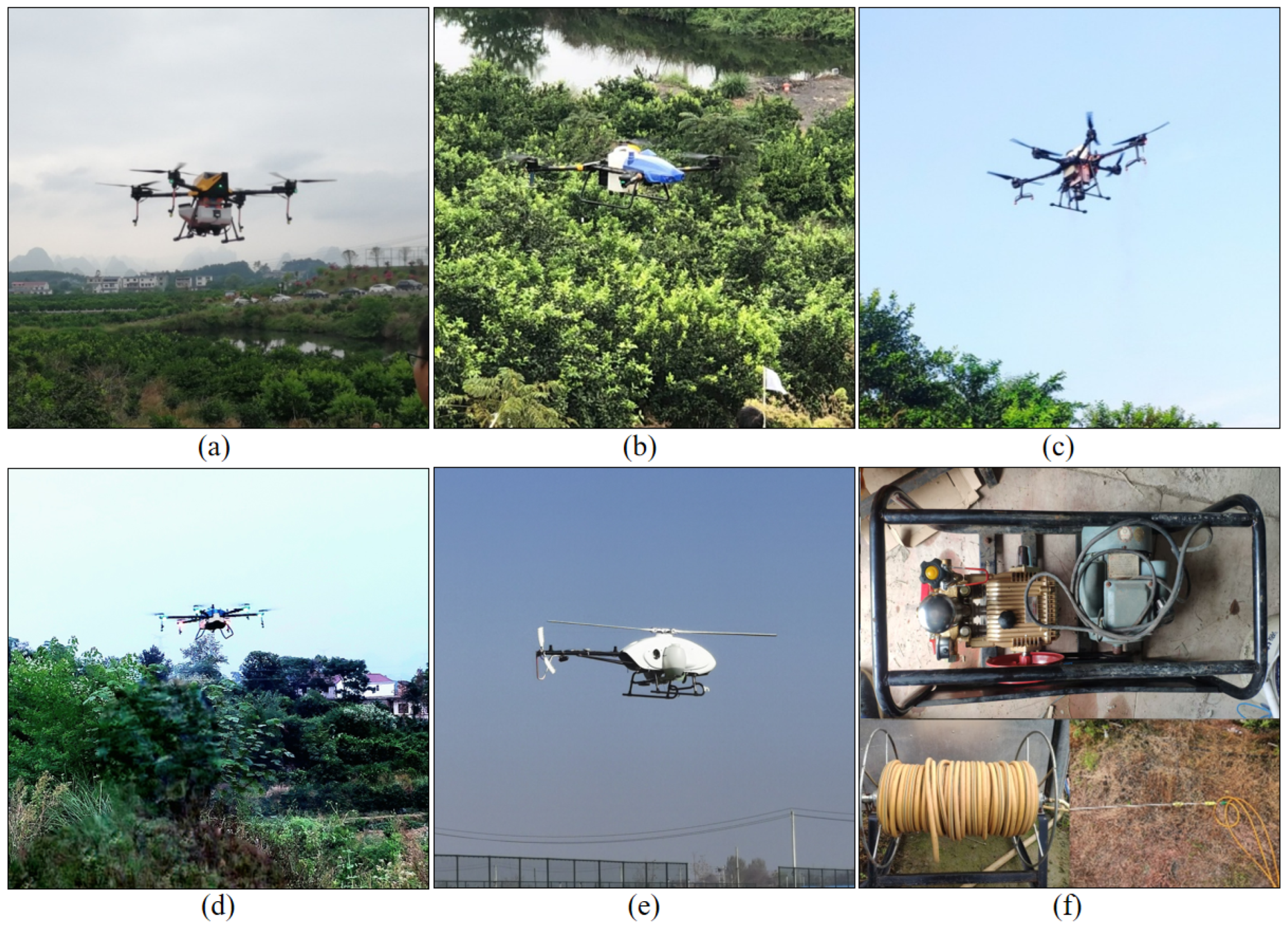
2.1.3. Spray Equipment
2.2. Experiment Design and Methods
2.2.1. Experiment Treatment Planning
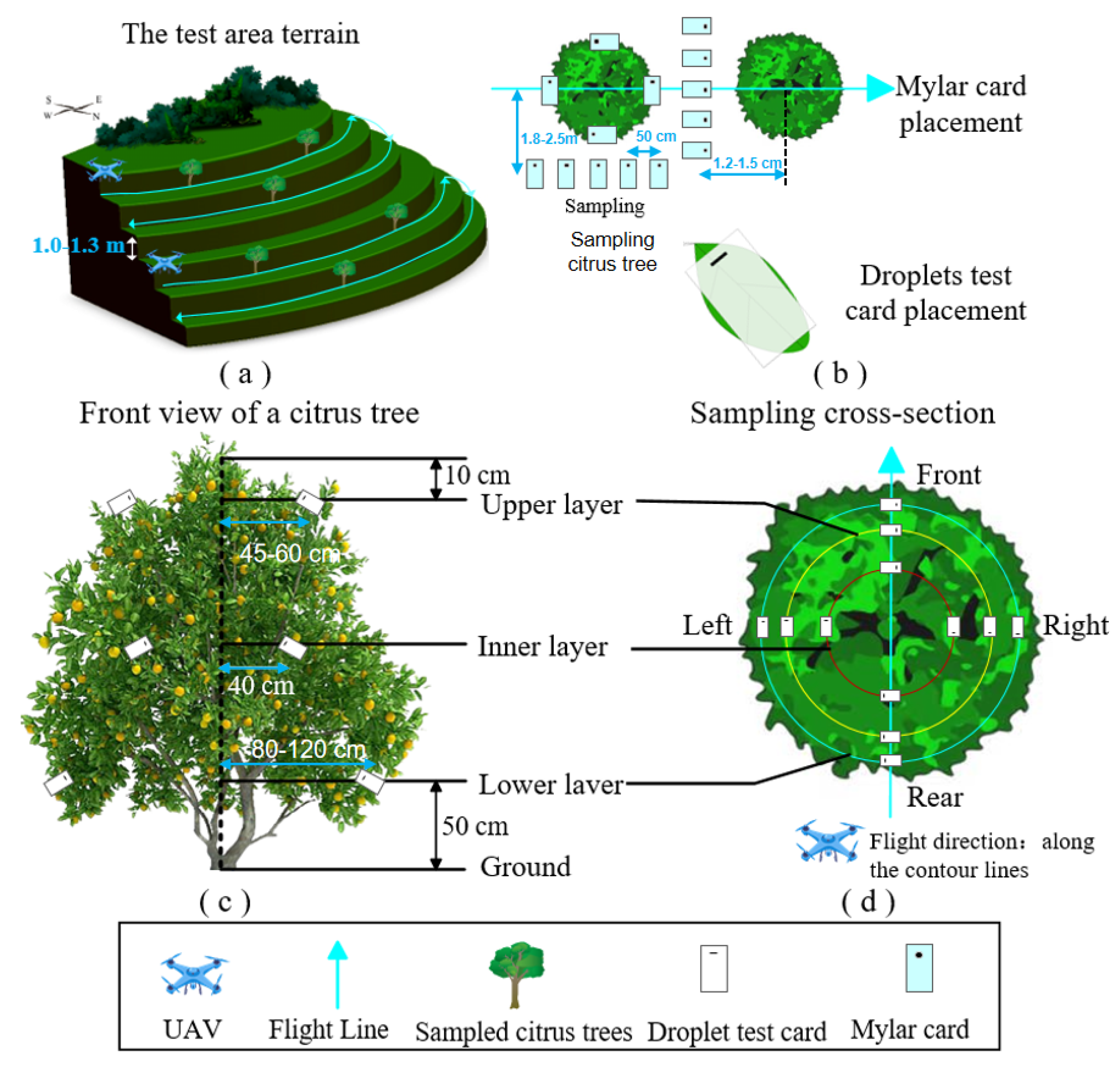
2.2.2. Spray Performance Test Sampling
2.2.3. Sample Processing and Statistical Analysis
3. Results and Discussion
3.1. Results of Spraying Performance
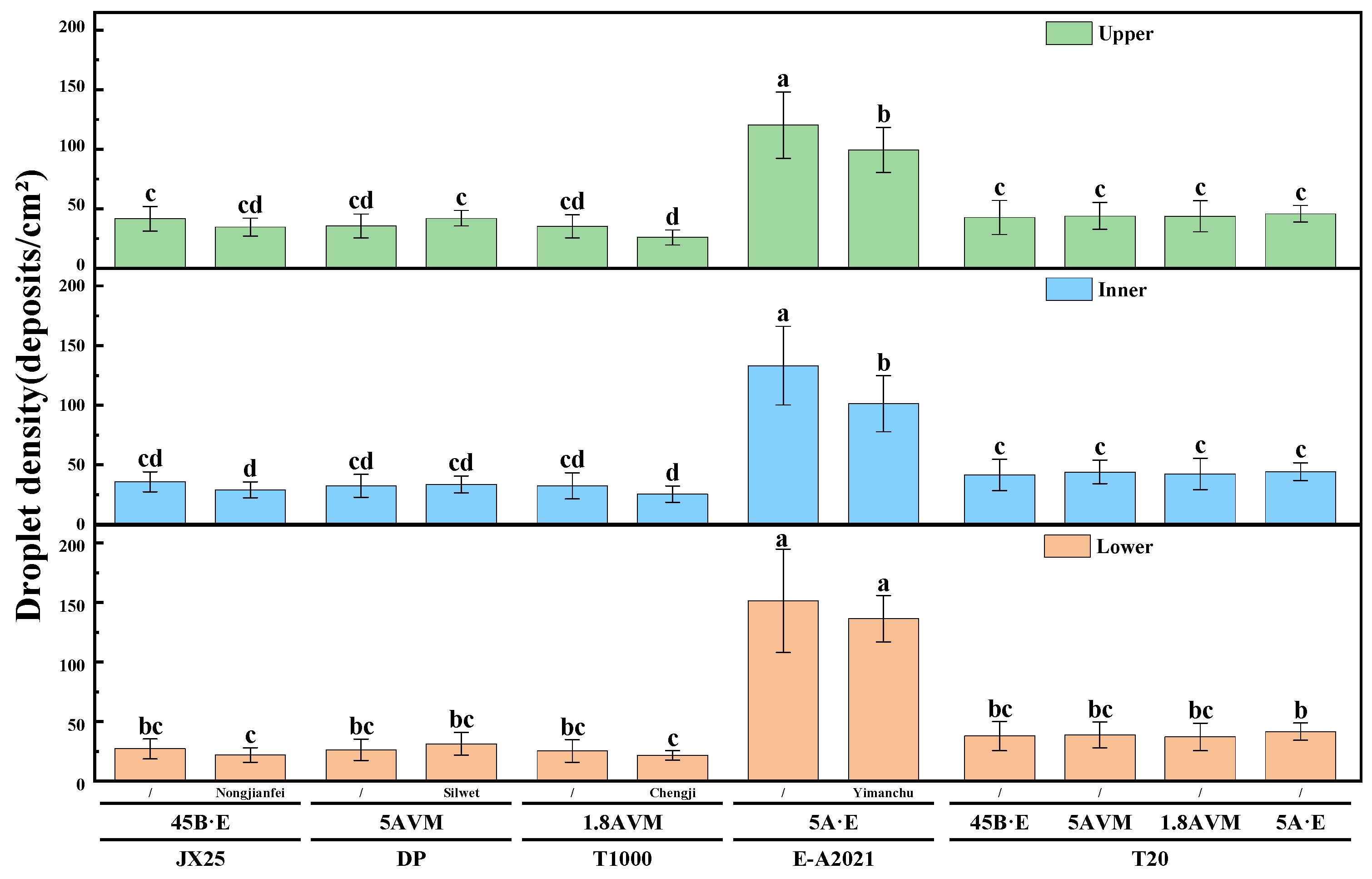
3.1.1. Distribution of Canopy Droplet Density
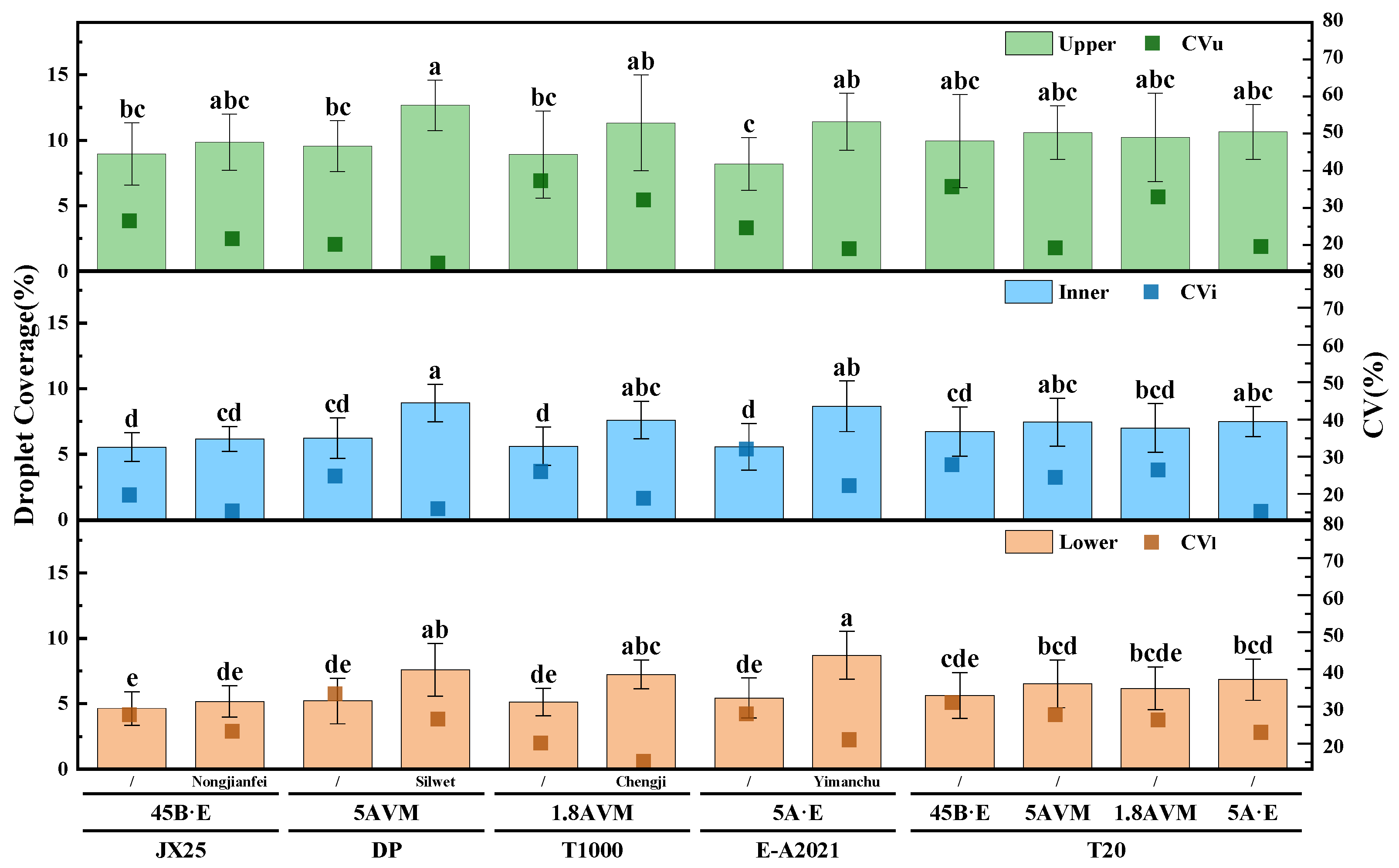
3.1.2. Distribution of Canopy Droplet Coverage and Penetration
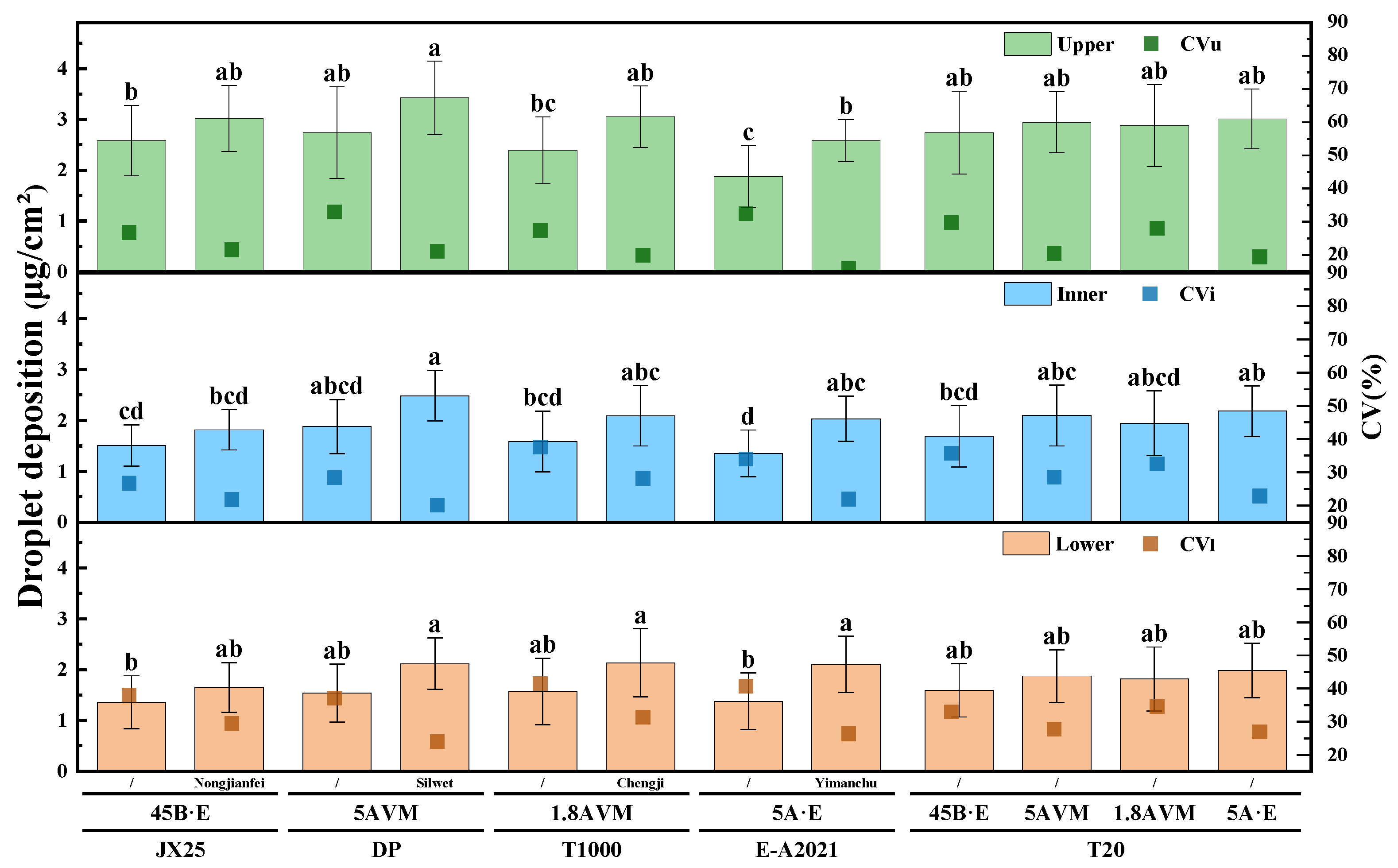
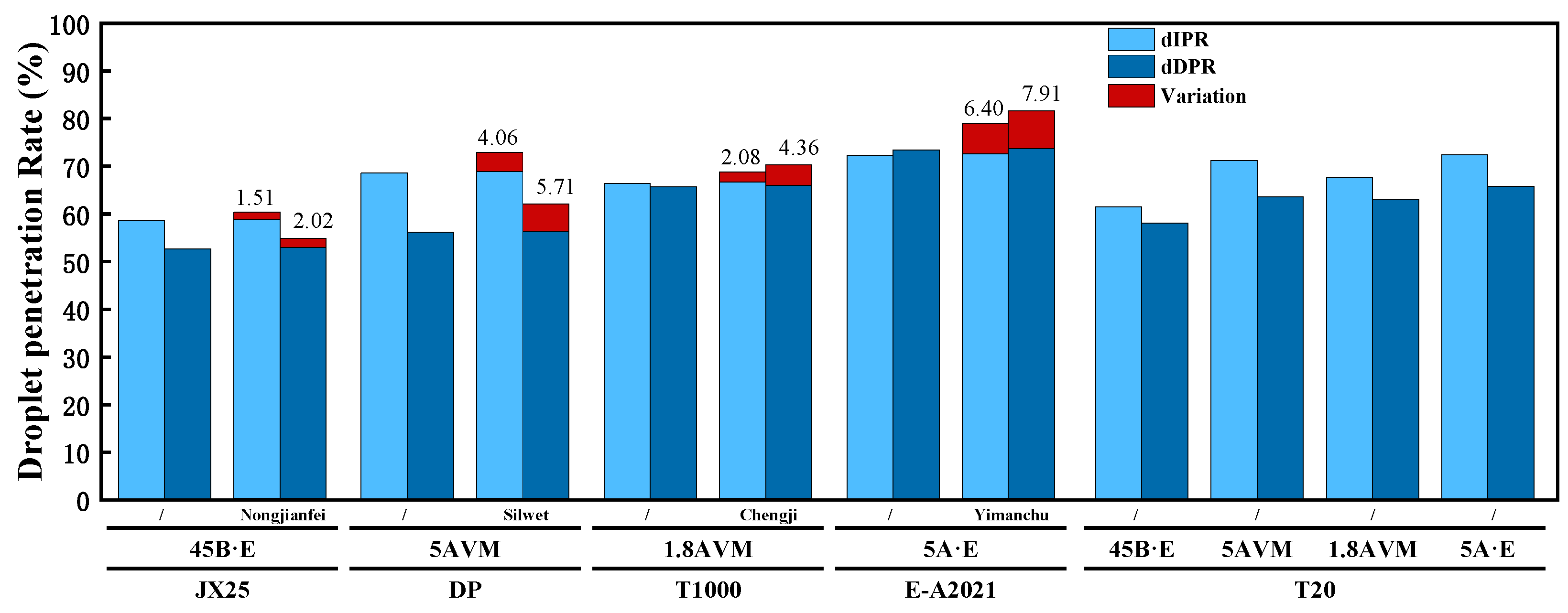
3.1.3. Distribution of Canopy Droplet Deposition and Penetration
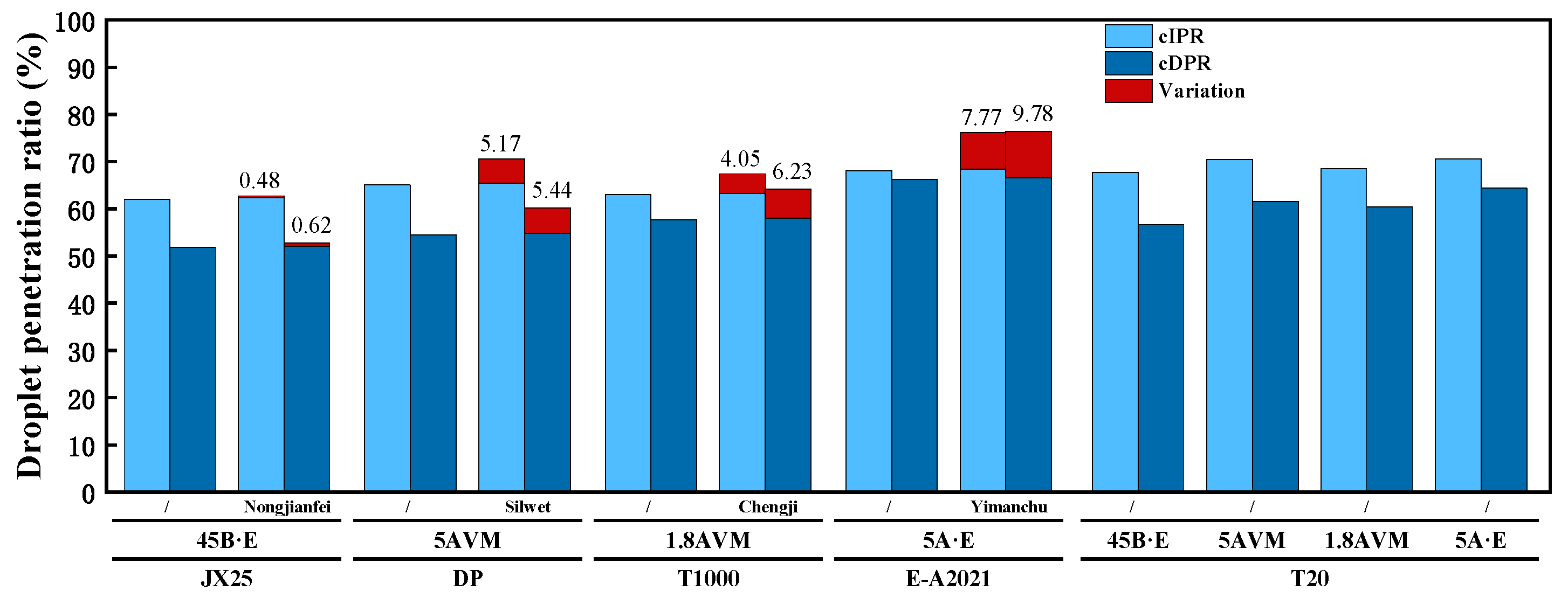
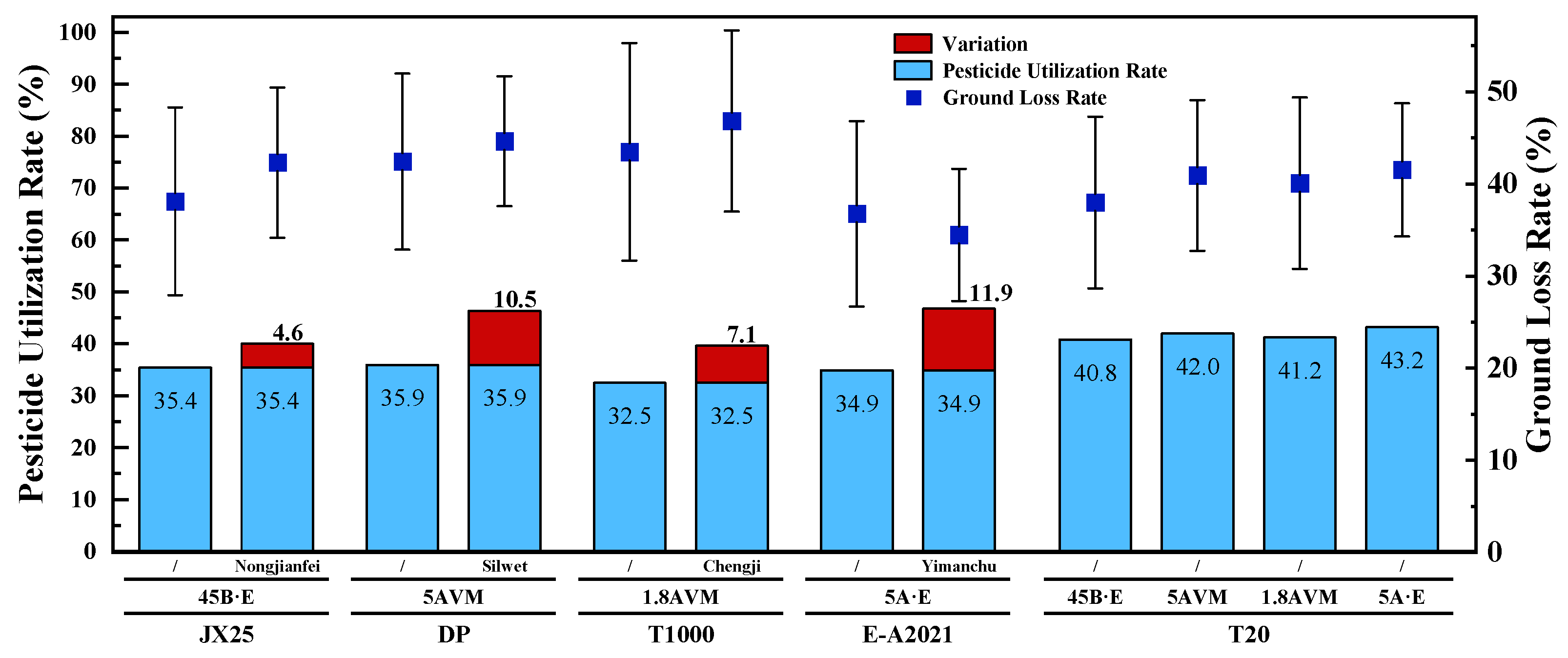
3.1.4. Canopy Pesticide Utilization Rate and Ground Loss Rate
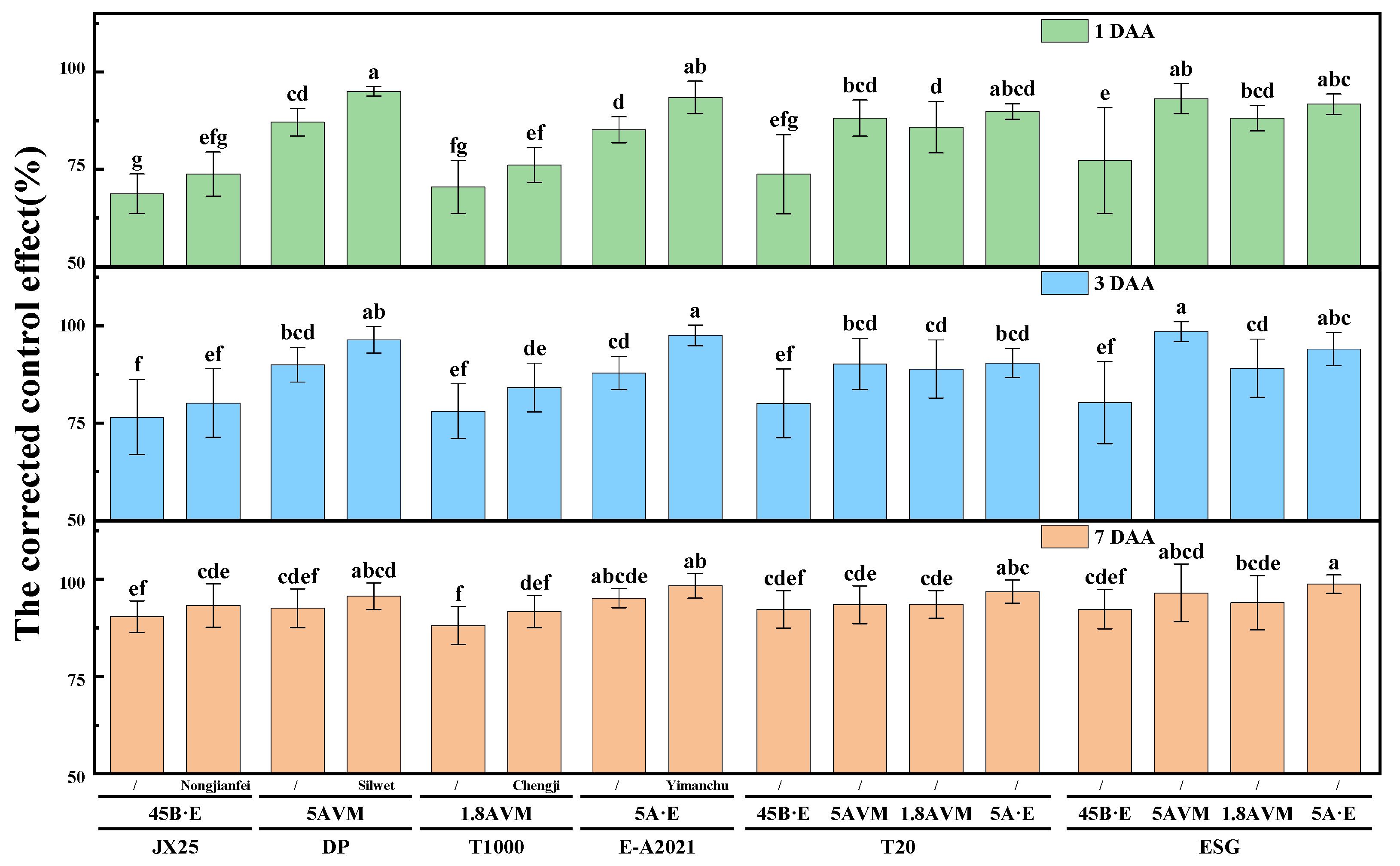
3.2. Control Effects of Different Spraying Methods
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Xu, H.; Qi, S.; Li, X.; Gao, C.; Wei, Y.; Liu, C. Monitoring three-decade dynamics of citrus planting in Southeastern China using dense Landsat records. Int. J. Appl. Earth Obs. 2021, 103, 102518. [Google Scholar] [CrossRef]
- Sharma, P.K.; Kumar, S. Soil Physical Environment and Plant Growth; Springer: Berlin/Heidelberg, Germany, 2023. [Google Scholar]
- Balasundram, S.K. Strategies for Precision Oil Palm Management in South Sumatra, Indonesia; University of Minnesota: Minneapolis, MN, USA, 2003. [Google Scholar]
- Nguyen, M.P. Analysis of Options by Context for Scaling Agroforestry in Northwest Vietnam; Bangor University (United Kingdom): Bangor, UK, 2020. [Google Scholar]
- Mohajer, S.S.; Golizadeh, A.; Hassanpour, M.; Fathi, S.A.A.; Sedaratian-Jahromi, A.; Abedi, Z. Interaction between biological parameters of Panonychus citri (Acari: Tetranychidae) and some phytochemical metabolites in different citrus species. Bull. Entomol. Res. 2022, 112, 509–519. [Google Scholar] [CrossRef] [PubMed]
- Pan, D.; Dou, W.; Yuan, G.; Zhou, Q.; Wang, J. Monitoring the resistance of the citrus red mite (Acari: Tetranychidae) to four acaricides in different citrus orchards in China. J. Econ. Entomol. 2020, 113, 918–923. [Google Scholar] [CrossRef] [PubMed]
- Ochiai, N.; Mizuno, M.; Mimori, N.; Miyake, T.; Dekeyser, M.; Canlas, L.J.; Takeda, M. Toxicity of bifenazate and its principal active metabolite, diazene, to Tetranychus urticae and Panonychus citri and their relative toxicity to the predaceous mites, Phytoseiulus persimilis and Neoseiulus californicus. Exp. Appl. Acarol. 2007, 43, 181–197. [Google Scholar] [CrossRef]
- Hu, J.; Wang, J.; Yu, Y.; Rao, W.; Chen, F.; Wang, C.; Fan, G. Cross-resistance pattern and genetic studies in spirotetramat-resistant citrus red mite, Panonychus citri (Acari: Tetranychidae). Agriculture 2022, 12, 737. [Google Scholar] [CrossRef]
- Wang, Z.; Pang, J.; Liao, C.; Zhang, Q.; Sun, D. Determination of etoxazole in different parts of citrus fruit and its potential dietary exposure risk assessment. Chemosphere 2021, 268, 128832. [Google Scholar] [CrossRef]
- Tang, H.; Sun, Q.; Huang, J.; Wen, G.; Han, L.; Wang, L.; Zhang, Y.; Dong, M.; Wang, W. Residue behaviors, degradation, processing factors, and risk assessment of pesticides in citrus from field to product processing. Sci. Total Environ. 2023, 897, 165321. [Google Scholar] [CrossRef]
- Chen, P.; Douzals, J.P.; Lan, Y.; Cotteux, E.; Delpuech, X.; Pouxviel, G.; Zhan, Y. Characteristics of unmanned aerial spraying systems and related spray drift: A review. Front. Plant Sci. 2022, 13, 870956. [Google Scholar] [CrossRef]
- Lan, Y.; Shengde, C.; Fritz, B.K. Current status and future trends of precision agricultural aviation technologies. Int. J. Agr. Biol. Eng. 2017, 10, 1–17. [Google Scholar]
- Wang, S.; Xu, S.; Yu, C.; Wu, H.; Liu, Q.; Liu, D.; Jin, L.; Zheng, Y.; Song, J.; He, X. Obstacle avoidance and profile ground flight test and analysis for plant protection UAV. Drones 2022, 6, 125. [Google Scholar] [CrossRef]
- Guo, S.; Chen, C.; Du, G.; Yu, F.; Yao, W.; Lan, Y. Evaluating the use of unmanned aerial vehicles for spray applications in mountain Nanguo pear orchards. Pest Manag. Sci. 2024, 80, 3590–3602. [Google Scholar] [CrossRef] [PubMed]
- Arakawa, T.; Kamio, S. Control efficacy of UAV-based ultra-low-volume application of pesticide in chestnut orchards. Plants 2023, 12, 2597. [Google Scholar] [CrossRef] [PubMed]
- Zeeshan, M.; Li, H.; Yousaf, G.; Ren, H.; Liu, Y.; Arshad, M.; Dou, Z.; Han, X. Effect of formulations and adjuvants on the properties of acetamiprid solution and droplet deposition characteristics sprayed by UAV. Front. Plant Sci. 2024, 15, 1441193. [Google Scholar] [CrossRef] [PubMed]
- Zhao, P.; Zheng, L.; Li, Y.; Wang, C.; Cao, L.; Cao, C.; Huang, Q. Tank-mix adjuvants regulate the deposition, absorption, and permeation behavior of pesticide solutions on rice plant. Agriculture 2022, 12, 1119. [Google Scholar] [CrossRef]
- Yan, X.; Yuan, H.; Zhou, X.; Wang, M.; Shi, X.; Chen, Y.; Yang, D. Control efficacy of different pesticide formulations and fan-nozzle model on wheat aphids by UAVs. Int. J. Precis. Agric. Aviat. 2020, 3, 35–39. [Google Scholar] [CrossRef]
- Wang, D.; Saleh, N.B.; Byro, A.; Zepp, R.; Sahle-Demessie, E.; Luxton, T.P.; Ho, K.T.; Burgess, R.M.; Flury, M.; White, J.C. Nano-enabled pesticides for sustainable agriculture and global food security. Nat. Nanotechnol. 2022, 17, 347–360. [Google Scholar] [CrossRef]
- Xiao, Q.; Xin, F.; Lou, Z.; Zhou, T.; Wang, G.; Han, X.; Lan, Y.; Fu, W. Effect of aviation spray adjuvants on defoliant droplet deposition and cotton defoliation efficacy sprayed by unmanned aerial vehicles. Agronomy 2019, 9, 217. [Google Scholar] [CrossRef]
- Qi, P.; He, X.; Liu, Y.; Ma, Y.; Wu, Z.; Wang, J. Design and test of target-oriented profile modeling of unmanned aerial vehicle spraying. Int. J. Agric. Biol. Eng. 2022, 15, 85–91. [Google Scholar] [CrossRef]
- Li, Y.; Han, L.; Liu, L.; Huang, Z.; Wang, C.; He, X. Design and spray performance evaluation of an air–ground cooperation stereoscopic plant protection system for mango orchards. Agronomy 2023, 13, 2007. [Google Scholar] [CrossRef]
- Zhang, H.; Qi, L.; Wan, J.; Musiu, E.M.; Zhou, J.; Lu, Z.; Wang, P. Numerical simulation of downwash airflow distribution inside tree canopies of an apple orchard from a multirotor unmanned aerial vehicle (UAV) sprayer. Comput. Electron. Agric. 2022, 195, 106817. [Google Scholar] [CrossRef]
- Mora, M.; Avila, F.; Carrasco-Benavides, M.; Maldonado, G.; Olguín-Cáceres, J.; Fuentes, S. Automated computation of leaf area index from fruit trees using improved image processing algorithms applied to canopy cover digital photograpies. Comput. Electron. Agric. 2016, 123, 195–202. [Google Scholar] [CrossRef]
- Gao, S.; Wang, G.; Zhou, Y.; Wang, M.; Yang, D.; Yuan, H.; Yan, X. Water-soluble food dye of Allura Red as a tracer to determine the spray deposition of pesticide on target crops. Pest Manag. Sci. 2019, 75, 2592–2597. [Google Scholar] [CrossRef] [PubMed]
- Baio, F.H.R.; Oliveira, J.T.D.; Alves, M.E.M.; Teodoro, L.P.R.; Cunha, F.F.D.; Teodoro, P.E. Characterization of the Droplet Population Generated by Centrifugal Atomization Nozzles of UAV Sprayers. AgriEngineering 2025, 7, 15. [Google Scholar] [CrossRef]
- Wang, C.; Liu, Y.; Zhang, Z.; Han, L.; Li, Y.; Zhang, H.; Wongsuk, S.; Li, Y.; Wu, X.; He, X. Spray performance evaluation of a six-rotor unmanned aerial vehicle sprayer for pesticide application using an orchard operation mode in apple orchards. Pest Manag. Sci. 2022, 78, 2449–2466. [Google Scholar] [CrossRef]
- Melita, C.D.; Guastella, D.C.; Cantelli, L.; Di Marco, G.; Minio, I.; Muscato, G. Low-altitude terrain-following flight planning for multirotors. Drones 2020, 4, 26. [Google Scholar] [CrossRef]
- Anken, T.; Coupy, G.; Dubuis, P.H.; Favre, G.; Geiser, H.C.; Gurba, A.; Häni, M.; Hochstrasser, M.; Landis, M.; Maitre, T. Plant protection treatments in Switzerland using unmanned aerial vehicles: Regulatory framework and lessons learned. Pest Manag. Sci. 2025; online ahead of print. [Google Scholar]
- GB/T 17980.11-2000; Guidelines for the Field Efficacy Trials of Pesticides (I)—Part 11: Acaricides Against Citrus Red Mites. Standardization Administration of China: Beijing, China, 2000. Available online: https://std.samr.gov.cn (accessed on 7 June 2025).
- Zhu, H.; Salyani, M.; Fox, R.D. A portable scanning system for evaluation of spray deposit distribution. Comput. Electron. Agric. 2011, 76, 38–43. [Google Scholar] [CrossRef]
- Silva, J.E.; Da Silva, W.H.B.; Ferraz, M.A.J.; Menezes, E.A.S.; Da Costa, O.P.; Inácio, F.D.; Barboza, T.O.C.; Melo, C.A.D.; Carvalho, G.R.; Dos Santos, A.F. Impact of spray volume and flight speed on the efficiency of drone applications in coffee plants of different ages. Smart Agric. Technol. 2024, 9, 100694. [Google Scholar] [CrossRef]
- ISO 24253-1:2015; Crop Protection Equipment—Spray Deposition Test for Field Crop—Part 1: Measurement in a Horizontal Plane. International Organization for Standardization: Geneva, Switzerland, 2015. Available online: https://www.iso.org/obp/ui/en/#iso:std:iso:24253:-1:ed-1:v1:en (accessed on 7 June 2025).
- NY/T 3630.1-2020; Methods for Field Determination of Pesticide Utilization Rate—Part 1: Determination Method for Pesticide Deposition Utili-Zation Rate of Stem–Leaf Spraying on Field Crops—Allura Red Indicator Method. Ministry of Agriculture and Rural Affairs: Beijing, China, 2020. Available online: http://www.moa.gov.cn (accessed on 7 June 2025).
- Hewitt, A.J. Adjuvant use for the management of pesticide drift, leaching and runoff. Pest Manag. Sci. 2024, 80, 4819–4827. [Google Scholar] [CrossRef]
- Nahiyoon, S.A.; Cui, L.; Yang, D.; Yan, X.; Rui, C.; Yuan, H. Biocidal radiuses of cycloxaprid, imidacloprid and lambda-cyhalothrin droplets controlling against cotton aphid (Aphis gossypii) using an unmanned aerial vehicle. Pest Manag. Sci. 2020, 76, 3020–3029. [Google Scholar] [CrossRef]
- Hołownicki, R.; Doruchowski, G.; Świechowski, W.; Konopacki, P.; Godyń, A. Effect of nozzle type and adjuvants on spray coverage on apple leaves. Agronomy 2021, 11, 1790. [Google Scholar] [CrossRef]
- Liu, H.; Dou, Z.; Ma, Y.; Pan, L.; Ren, H.; Wang, X.; Ma, C.; Han, X. Effects of Nozzle Types and Spraying Volume on the Control of Hypera postica Gyllenhal by Using an Unmanned Aerial Vehicle. Agronomy 2023, 13, 2287. [Google Scholar] [CrossRef]
- Song, R.; Wu, Y.; Bao, Z.; Gao, Y.; Zhao, K.; Zhang, S.; Zhang, C.; Du, F. Machine learning to predict the interfacial behavior of pesticide droplets on hydrophobic surfaces for minimizing environmental risk. ACS Sustain. Chem. Eng. 2022, 10, 14034–14044. [Google Scholar] [CrossRef]
- Qin, W.; Qiu, B.; Xue, X.; Chen, C.; Xu, Z.; Zhou, Q. Droplet deposition and control effect of insecticides sprayed with an unmanned aerial vehicle against plant hoppers. Crop Prot. 2016, 85, 79–88. [Google Scholar] [CrossRef]
- Qi, P.; Zhang, L.; Wang, Z.; Han, H.; Mueller, J.; Li, T.; Wang, C.; Huang, Z.; He, M.; Liu, Y.; et al. Effect of Operational Parameters of Unmanned Aerial Vehicle (UAV) on Droplet Deposition in Trellised Pear Orchard. Drones 2023, 7, 57. [Google Scholar] [CrossRef]

| Parameters | JX25 | E-A2021 | T20 | DP | T1000 |
|---|---|---|---|---|---|
| Dimensions (mm) | 1235 × 1235 × 647 | 1430 × 1170 × 510 | 1795 × 1510 × 732 | 2485 × 2255 × 850 | 2130 × 700 × 670 |
| Total weight (kg) | 23.5 | 25.25 | 21.1 | 42 | 30 |
| Tank volume (L) | 22 | 20 | 20 | 18 | 12 |
| Nozzle type | Teejet 110025vk | CCMS | Teejet SX11001VS | Teejet XR11001VS | Teejet XR11001VS |
| Number of nozzles | 4 | 2 | 8 | 8 | 5 |
| Droplet size (μm) | 120–200 | 20–250 | 130–250 | 130–250 | 130–250 |
| Flow rate (L/min) | 3.2–7.4 | 0.4–3.5 | 3.6 | 4–7 | 1.44–1.86 |
| Effective swath width (m) | 6–7 | 4–5 | 4–7 | 5.5–6.5 | 4–6 |
| Treatment | Spray Equipment | Testing Pesticides | Effective Dose (g a.i./ha) | Adjuvants (mL) | Flight Speed (m/s) | Flight Height (m) |
|---|---|---|---|---|---|---|
| 1 | JX25 | 45B·E | 675 | / | 3 | 1.5 |
| 2 | Nongjianfei 8 | |||||
| 3 | DP | 5AVM | 60 | / | 4 | 3 |
| 4 | Silwet 40 | |||||
| 5 | T1000 | 1.8AVM | 18.09 | / | 5 | 4 |
| 6 | Chengji 40 | |||||
| 7 | E-A2021 | 5A·E | 75 | / | 3 | 3 |
| 8 | Yimanchu 100 | |||||
| 9 | T20 | 45B·E | 675 | / | 3 | 3 |
| 10 | 5AVM | 60 | / | |||
| 11 | 1.8AVM | 18.09 | / | |||
| 12 | 5A·E | 75 | / | |||
| 13 | ESG | 45B·E | 675 | / | / | / |
| 14 | 5AVM | 60 | / | / | / | |
| 15 | 1.8AVM | 18.09 | / | / | / | |
| 16 | 5A·E | 75 | / | / | / |
| Test | Spray Equipment | Testing Pesticides | Adjuvants | Control Effect 1 (%) | |
|---|---|---|---|---|---|
| 14 DAA | 25 DAA | ||||
| 1 | JX25 | 45B·E | / | 96.8 ± 3.5 abc 2 | 91.4 ± 5.8 abcd |
| 2 | Nongjianfei | 98.7 ± 1.4 a | 94.8 ± 4.8 ab | ||
| 3 | DP | 5AVM | / | 86.8 ± 5.3 f | 80.9 ± 7.8 ef |
| 4 | Silwet | 92.9 ± 4.1 bcd | 86.3 ± 5.2 bcde | ||
| 5 | T1000 | 1.8AVM | / | 87.3 ± 8.6 ef | 79.8 ± 9.3 ef |
| 6 | Chengji | 89.7 ± 5.3 def | 84.2 ± 4.9 def | ||
| 7 | E-A2021 | 5A·E | / | 96.8 ± 1.7 abc | 91.6 ± 5.0 abcd |
| 8 | Yimanchu | 99.2 ± 1.5 a | 97.4 ± 3.7 a | ||
| 9 | T20 | 45B·E | / | 95.3 ± 4.9 abc | 89.7 ± 5.7 abcd |
| 10 | 5AVM | / | 88.3 ± 7.8 def | 83.8 ± 9.2 def | |
| 11 | 1.8AVM | / | 89.3 ± 5.1 def | 85.8 ± 5.6 cdef | |
| 12 | 5A·E | / | 96.3 ± 3.4 abc | 93.6 ± 5.3 abc | |
| 13 | ESG | 45B·E | / | 98.4 ± 2.2 ab | 88.1 ± 11.6 bcde |
| 14 | 5AVM | / | 92.6 ± 9.4 cde | 77.6 ± 17.5 f | |
| 15 | 1.8AVM | / | 89.4 ± 9.0 def | 86.3 ± 8.8 bcde | |
| 16 | 5A·E | / | 97.6 ± 3.2 abc | 86.8 ± 12.2 bcde | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cui, Z.; Cui, L.; Yan, X.; Han, Y.; Yang, W.; Zhan, Y.; Wu, J.; Qin, Y.; Chen, P.; Lan, Y. Field Evaluation of Different Unmanned Aerial Spraying Systems Applied to Control Panonychus citri in Mountainous Citrus Orchards. Agriculture 2025, 15, 1283. https://doi.org/10.3390/agriculture15121283
Cui Z, Cui L, Yan X, Han Y, Yang W, Zhan Y, Wu J, Qin Y, Chen P, Lan Y. Field Evaluation of Different Unmanned Aerial Spraying Systems Applied to Control Panonychus citri in Mountainous Citrus Orchards. Agriculture. 2025; 15(12):1283. https://doi.org/10.3390/agriculture15121283
Chicago/Turabian StyleCui, Zongyin, Li Cui, Xiaojing Yan, Yifang Han, Weiguang Yang, Yilong Zhan, Jiapei Wu, Yingdong Qin, Pengchao Chen, and Yubin Lan. 2025. "Field Evaluation of Different Unmanned Aerial Spraying Systems Applied to Control Panonychus citri in Mountainous Citrus Orchards" Agriculture 15, no. 12: 1283. https://doi.org/10.3390/agriculture15121283
APA StyleCui, Z., Cui, L., Yan, X., Han, Y., Yang, W., Zhan, Y., Wu, J., Qin, Y., Chen, P., & Lan, Y. (2025). Field Evaluation of Different Unmanned Aerial Spraying Systems Applied to Control Panonychus citri in Mountainous Citrus Orchards. Agriculture, 15(12), 1283. https://doi.org/10.3390/agriculture15121283