
Optimization of Coverage Path Planning for Agricultural Drones in Weed-Infested Fields Using Semantic Segmentation


Abstract
1. Introduction
- 1.
- Coverage path planning with refueling constraints: Design of an off-line coverage path planning strategy that includes the following: (i) Sweep direction optimization based on a custom cost function that considers both drone velocity and yaw dynamics; (ii) Integration of the Traveling Salesman Problem with Refueling (TSPWR), solved using a metaheuristic approach based on genetic algorithms to obtain the total trajectory over a crop field.
- 2.
- Mission optimization: Enhancement of herbicide or fertilizer application efficiency through the integration of semantic perception and refueling-aware path optimization.
- 3.
- A comprehensive framework is developed for autonomous drone-based herbicide application that integrates deep learning-based semantic segmentation and coverage path optimization. In addition, the feasibility and effectiveness in precision agricultural scenarios of the proposed method, using real-world agricultural datasets, is demonstrated.
2. Materials and Methods
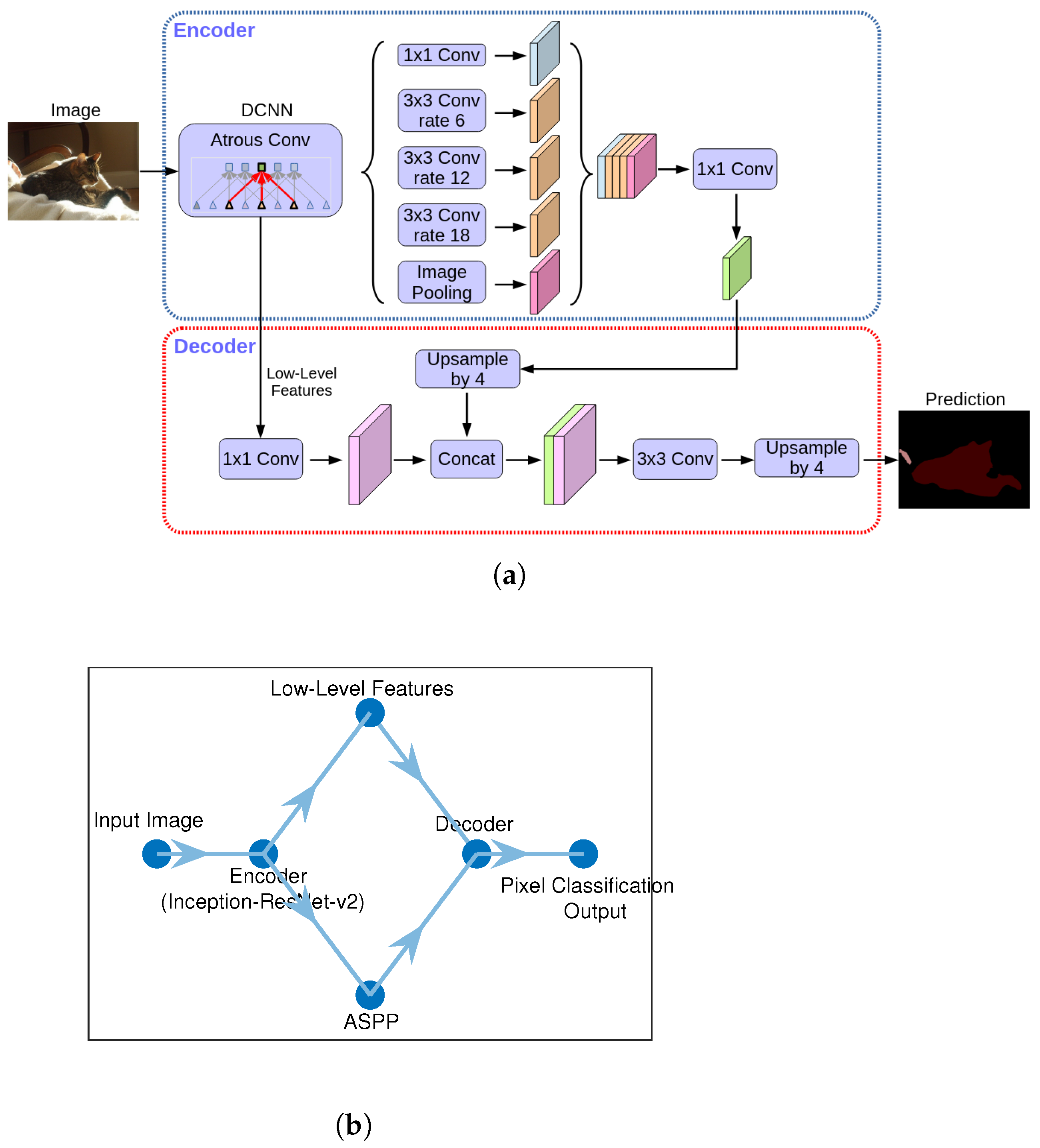
2.1. Semantic Segmentation Using DeepLab v3+
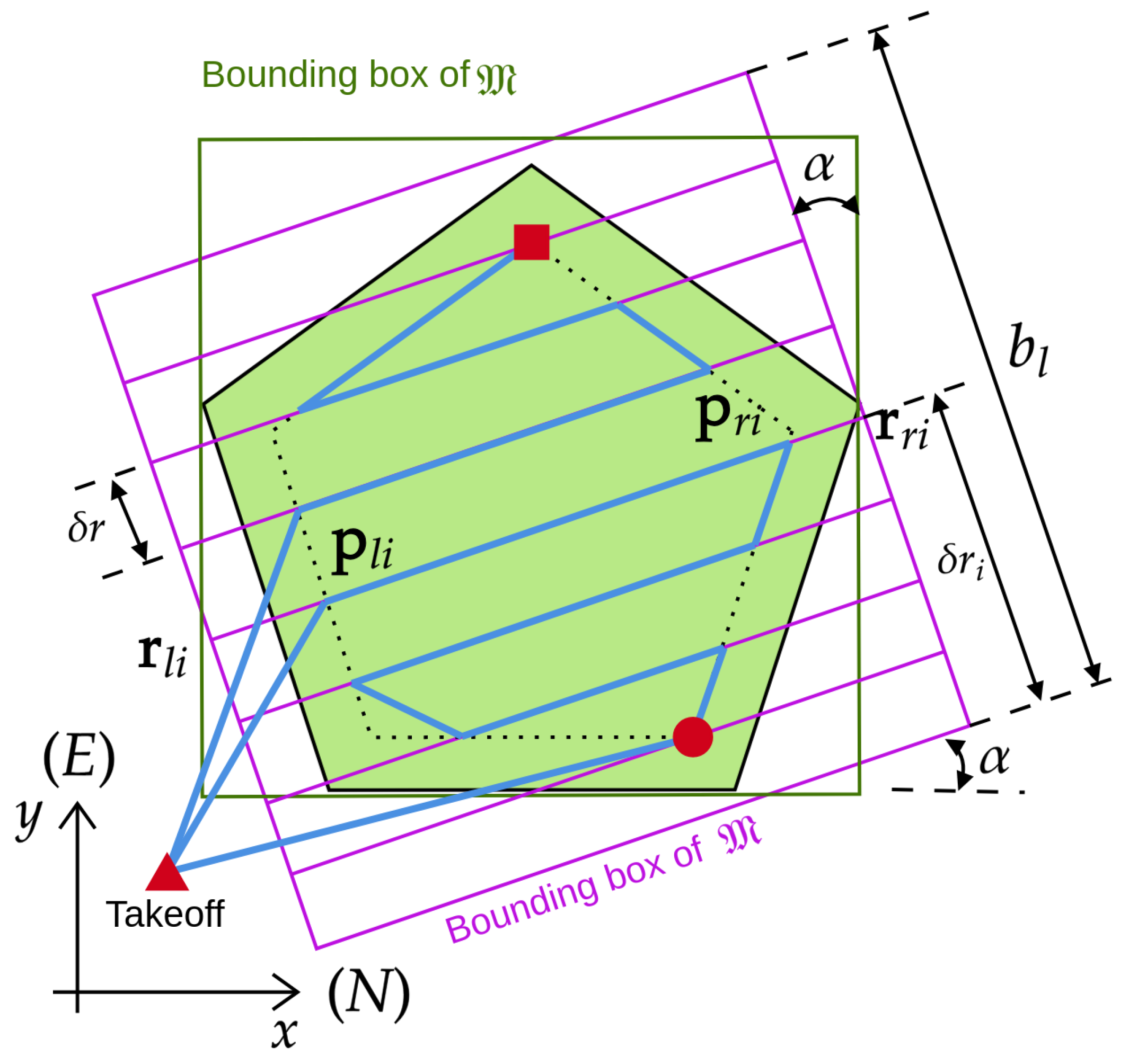
2.2. Coverage Path Planning of a Convex Polygon with Refueling
| Algorithm 1 Coverage path with refueling (CPWR). |
|
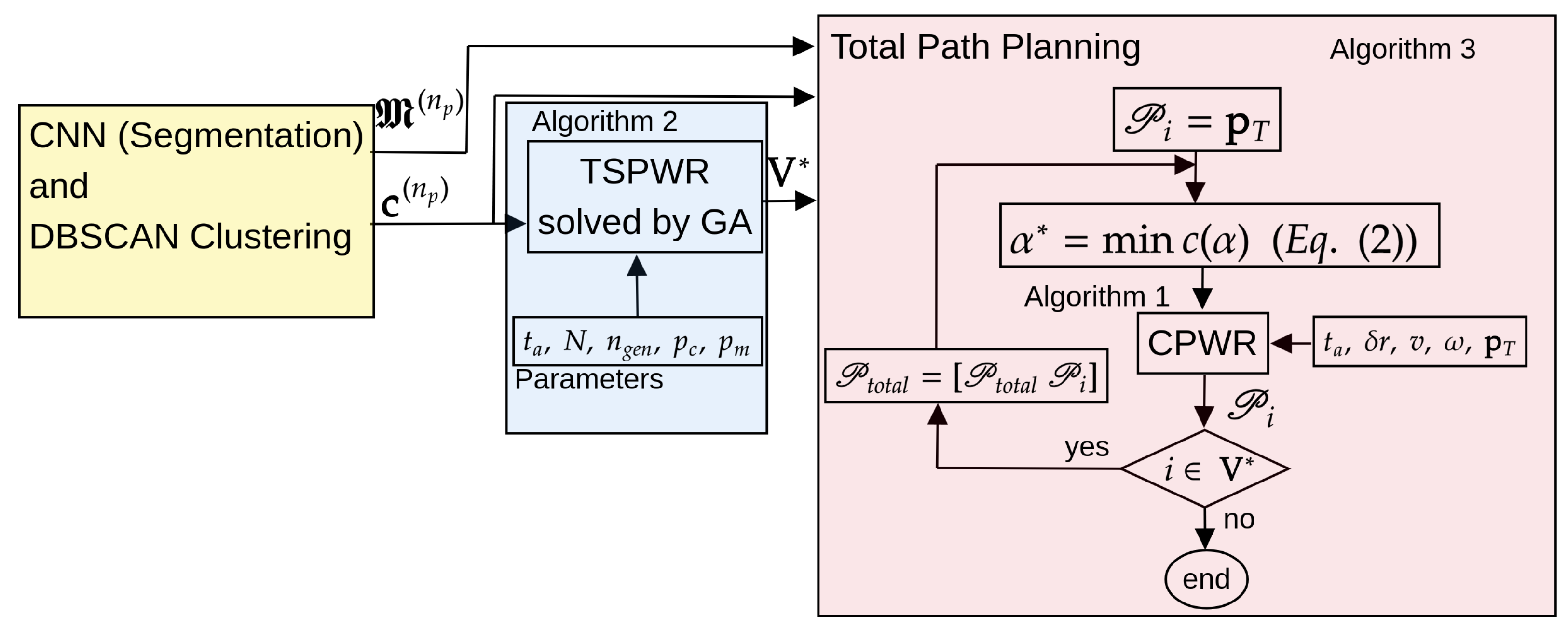
2.3. Total Coverage Path for Several Polygons
| Algorithm 2 Genetic algorithm (GA) for the traveling salesman problem with refueling constraint (TSPWR). |
|
| Algorithm 3 Computation of total coverage path for multiple convex polygons. |
|
2.4. Approach for Coverage Path Optimization in Weed-Infested Areas
3. Results
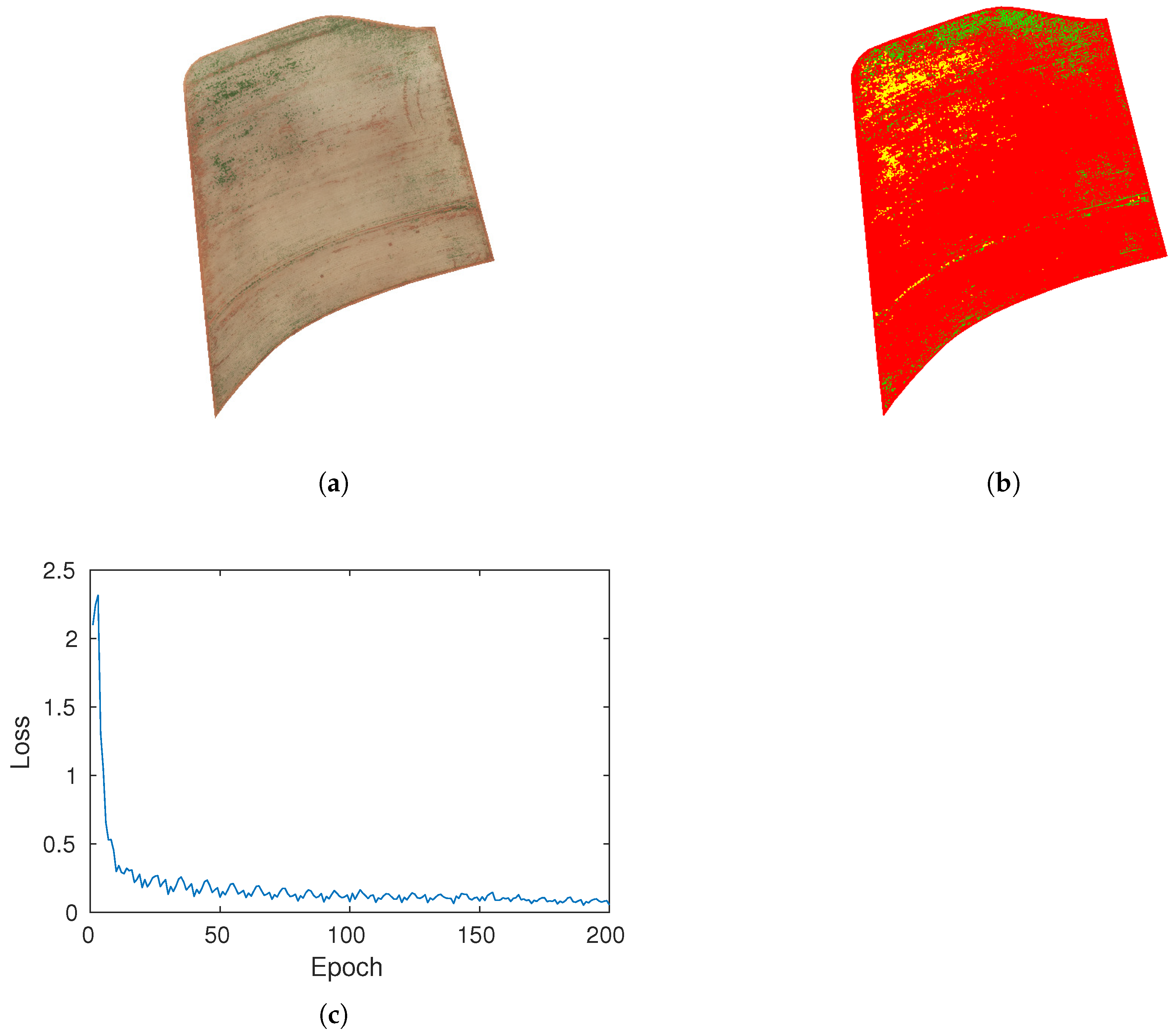
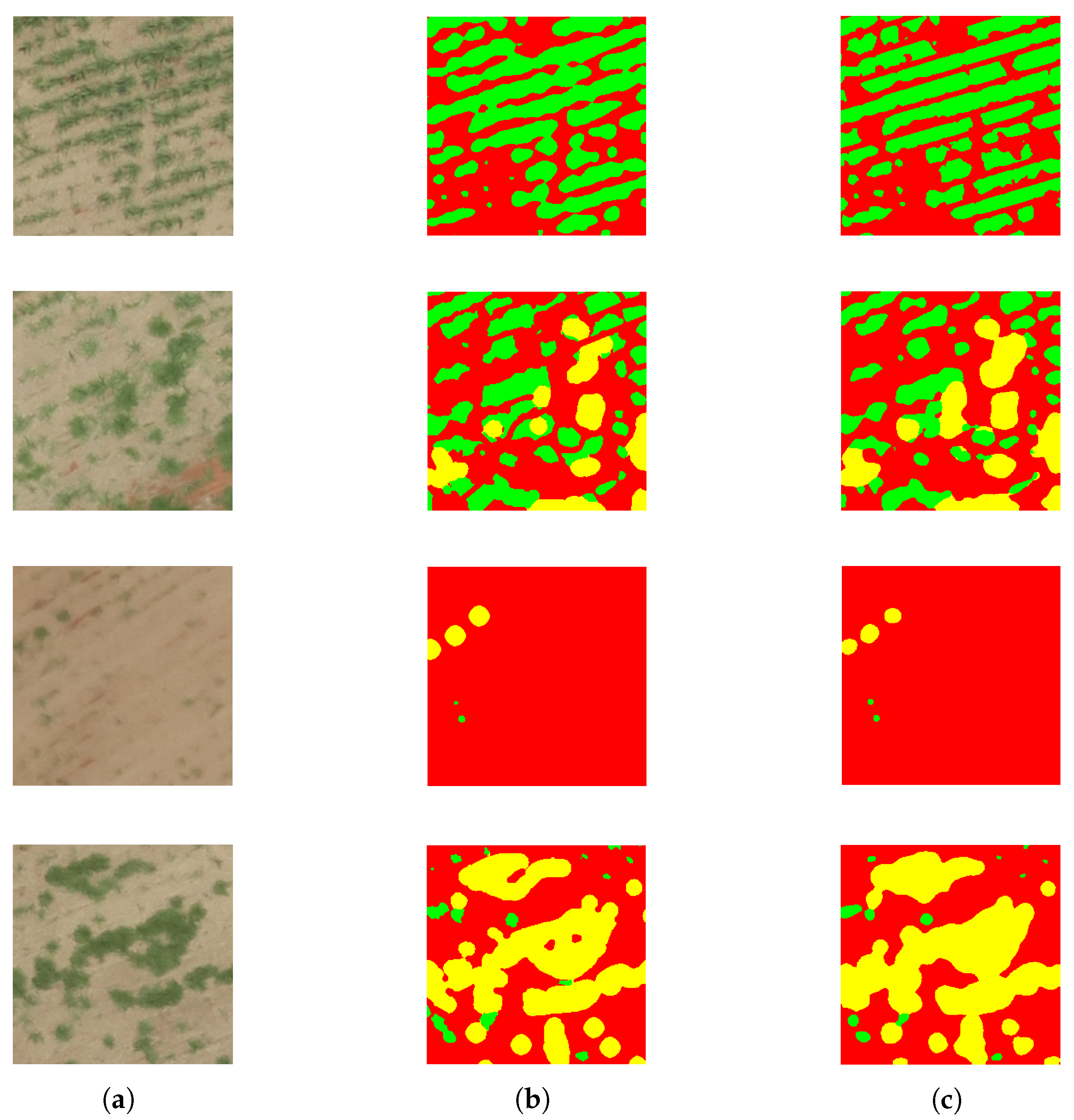
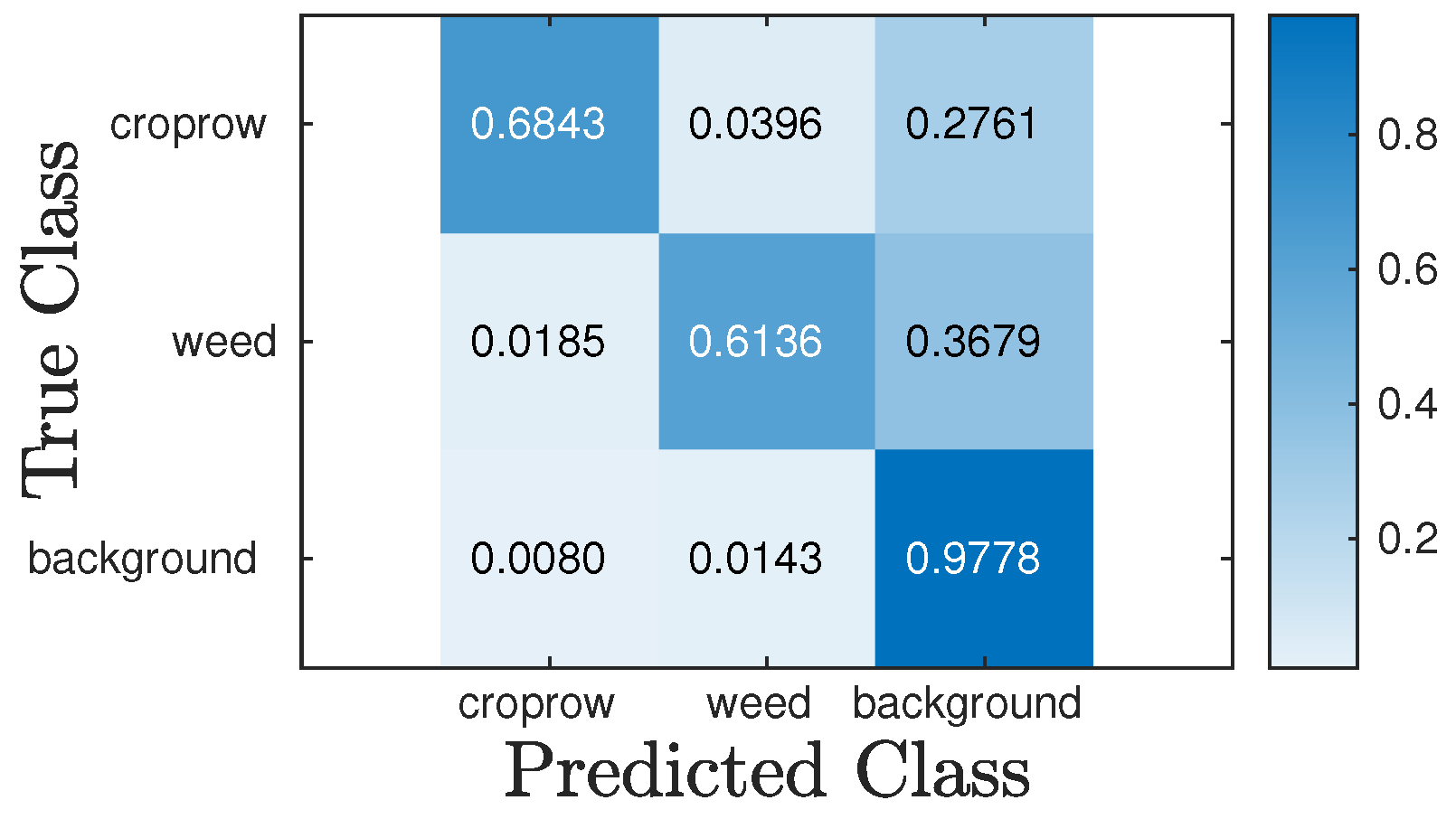
3.1. Semantic Segmentation for Weed Detection in Sugarcane Fields
3.2. Coverage Path Planning Approach
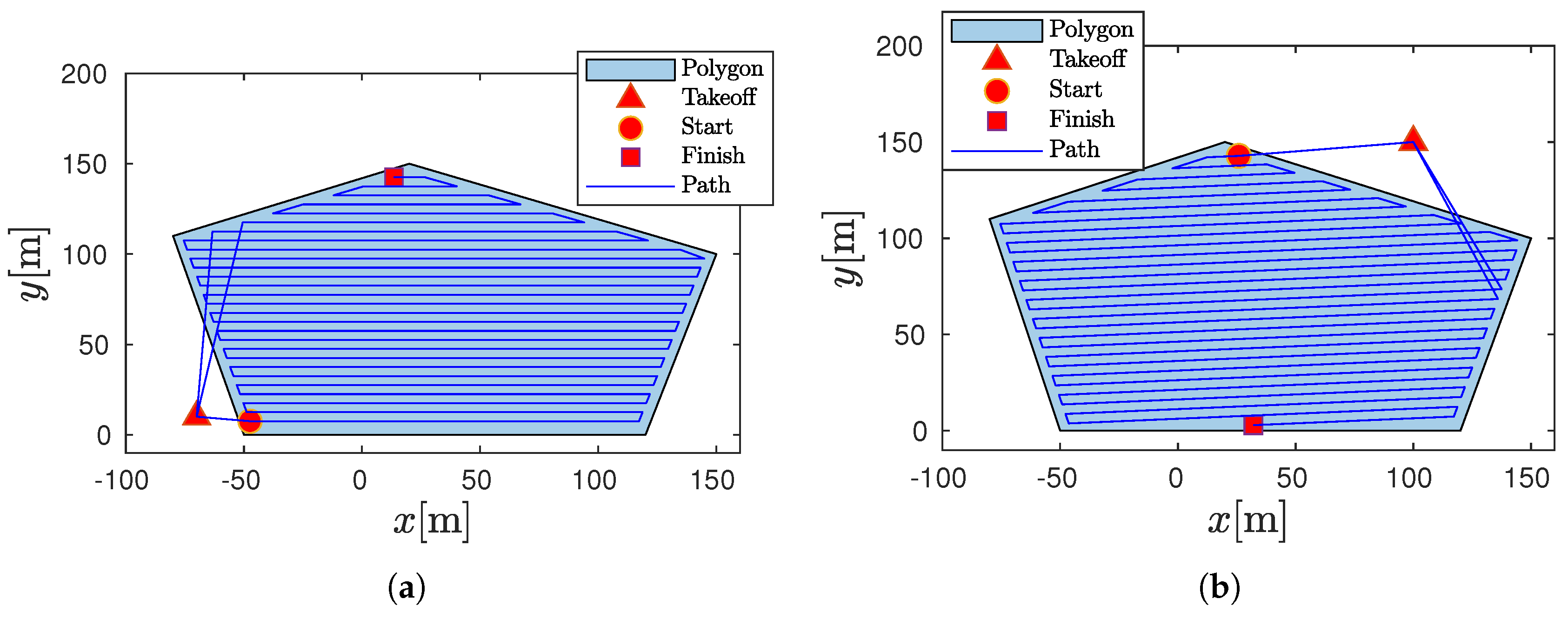
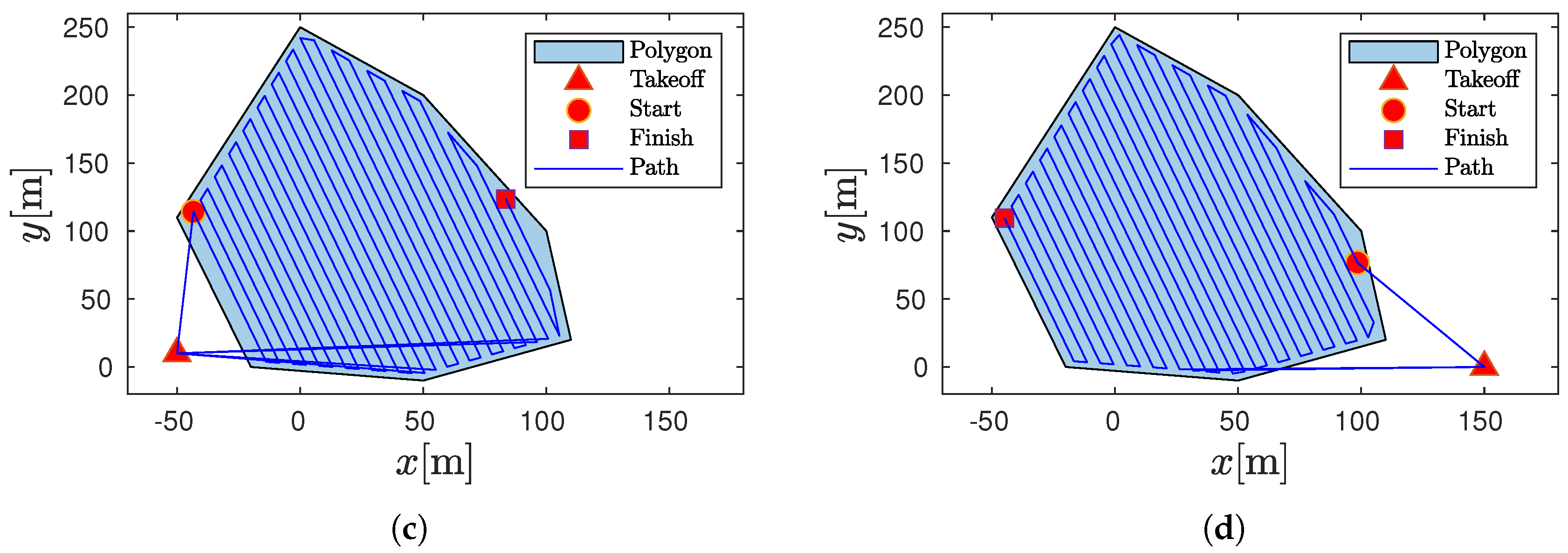
3.2.1. Analysis of the Coverage Path with Refueling (CPWR)
3.2.2. Total Coverage Path for Several Polygons
3.3. Coverage Path Optimization in Weed-Infested Areas
3.4. Key Strengths and Limitations of the Proposed Method
4. Conclusions
Funding
Data Availability Statement
Conflicts of Interest
Symbols and Abbreviations
| List of Symbols | |
| c | Cost function: time path |
| Sweep direction | |
| Flight endurance: the total time a drone | |
| can remain airborne on a single battery charge | |
| Drone’s angular velocity (yaw rate) | |
| v | Drone’s linear velocity in a straight line |
| Take-off position | |
| Row spacing | |
| Times of return-to-home take-off position (depot) | |
| Convex polygon of the weed-infested area | |
| Centroid of the polygon | |
| Partial cost function | |
| Bounding box limit | |
| Current row | |
| for the i-th row line | |
| Total coverage path | |
| , Waypoints of a single row | |
| Total number of waypoints | |
| Total number of polygons | |
| N | Population size |
| Number of generations | |
| Crossover probability | |
| Mutation probability | |
| Optimal sequence for visiting the polygons | |
| Time to compute the total coverage path | |
| Time to compute the TSPWR problem | |
| Abbreviations | |
| CPP | Coverage Path Planning |
| UAV | Unmanned Aerial Vehicle |
| TSPWR | Traveling Salesman Problem With Refueling |
| GA | Genetic Algorithm |
| NN | Nearest Neighbor |
References
- Mogili, U.R.; Deepak, B. Review on application of drone systems in precision agriculture. Procedia Comput. Sci. 2018, 133, 502–509. [Google Scholar] [CrossRef]
- Hafeez, A.; Husain, M.A.; Singh, S.; Chauhan, A.; Khan, M.T.; Kumar, N.; Chauhan, A.; Soni, S. Implementation of drone technology for farm monitoring & pesticide spraying: A review. Inf. Process. Agric. 2023, 10, 192–203. [Google Scholar]
- Bouzid, Y.; Bestaoui, Y.; Siguerdidjane, H. Quadrotor-UAV optimal coverage path planning in cluttered environment with a limited onboard energy. In Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017; pp. 979–984. [Google Scholar] [CrossRef]
- Akshya, J.; Neelamegam, G.; Sureshkumar, C.; Nithya, V.; Kadry, S. Enhancing UAV path planning efficiency through adamoptimized deep neural networks for area coverage missions. Procedia Comput. Sci. 2024, 235, 2–11. [Google Scholar]
- Tian, H.; Wang, T.; Liu, Y.; Qiao, X.; Li, Y. Computer vision technology in agricultural automation—A review. Inf. Process. Agric. 2020, 7, 1–19. [Google Scholar] [CrossRef]
- Latif, G.; Alghazo, J.; Maheswar, R.; Vijayakumar, V.; Butt, M. Deep learning based intelligence cognitive vision drone for automatic plant diseases identification and spraying. J. Intell. Fuzzy Syst. 2020, 39, 8103–8114. [Google Scholar] [CrossRef]
- Fawakherji, M.; Youssef, A.; Bloisi, D.; Pretto, A.; Nardi, D. Crop and weeds classification for precision agriculture using context-independent pixel-wise segmentation. In Proceedings of the 2019 Third IEEE International Conference on Robotic Computing (IRC), Naples, Italy, 25–27 February 2019; IEEE: New York, NY, USA, 2019; pp. 146–152. [Google Scholar]
- Hashemi-Beni, L.; Gebrehiwot, A.; Karimoddini, A.; Shahbazi, A.; Dorbu, F. Deep Convolutional Neural Networks for Weeds and Crops Discrimination From UAS Imagery. Front. Remote. Sens. 2022, 3, 755939. [Google Scholar] [CrossRef]
- Zhang, J.; Yu, F.; Zhang, Q.; Wang, M.; Yu, J.; Tan, Y. Advancements of UAV and deep learning technologies for weed management in Farmland. Agronomy 2024, 14, 494. [Google Scholar] [CrossRef]
- Rai, N.; Zhang, Y.; Ram, B.G.; Schumacher, L.; Yellavajjala, R.K.; Bajwa, S.; Sun, X. Applications of deep learning in precision weed management: A review. Comput. Electron. Agric. 2023, 206, 107698. [Google Scholar] [CrossRef]
- Stache, F.; Westheider, J.; Magistri, F.; Stachniss, C.; Popović, M. Adaptive path planning for UAVs for multi-resolution semantic segmentation. Robot. Auton. Syst. 2023, 159, 104288. [Google Scholar] [CrossRef]
- Sun, Q.; Zhang, R.; Chen, L.; Zhang, L.; Zhang, H.; Zhao, C. Semantic segmentation and path planning for orchards based on UAV images. Comput. Electron. Agric. 2022, 200, 107222. [Google Scholar] [CrossRef]
- Dharmadhikari, M.; Alexis, K. Semantics-aware exploration and inspection path planning. In Proceedings of the 2023 IEEE International Conference on Robotics and Automation (ICRA), London, UK, 29 May–2 June 2023; IEEE: New York, NY, USA, 2023; pp. 3360–3367. [Google Scholar]
- Syed, T.N.; Zhou, J.; Lakhiar, I.A.; Marinello, F.; Gemechu, T.T.; Rottok, L.T.; Jiang, Z. Enhancing Autonomous Orchard Navigation: A Real-Time Convolutional Neural Network-Based Obstacle Classification System for Distinguishing ‘Real’ and ‘Fake’ Obstacles in Agricultural Robotics. Agriculture 2025, 15, 827. [Google Scholar] [CrossRef]
- Cabreira, T.M.; Brisolara, L.B.; Ferreira, P.R., Jr. Survey on Coverage Path Planning with Unmanned Aerial Vehicles. Drones 2019, 3, 4. [Google Scholar] [CrossRef]
- Di Franco, C.; Buttazzo, G. Coverage path planning for UAVs photogrammetry with energy and resolution constraints. J. Intell. Robot. Syst. 2016, 83, 445–462. [Google Scholar] [CrossRef]
- Vasquez-Gomez, J.I.; Herrera-Lozada, J.C.; Olguin-Carbajal, M. Coverage Path Planning for Surveying Disjoint Areas. In Proceedings of the 2018 International Conference on Unmanned Aircraft Systems (ICUAS), Dallas, TX, USA, 12–15 June 2018; pp. 899–904. [Google Scholar] [CrossRef]
- Yuan, J.; Liu, Z.; Lian, Y.; Chen, L.; An, Q.; Wang, L.; Ma, B. Global Optimization of UAV Area Coverage Path Planning Based on Good Point Set and Genetic Algorithm. Aerospace 2022, 9, 86. [Google Scholar] [CrossRef]
- Torres, M.; Pelta, D.A.; Verdegay, J.L.; Torres, J.C. Coverage path planning with unmanned aerial vehicles for 3D terrain reconstruction. Expert Syst. Appl. 2016, 55, 441–451. [Google Scholar] [CrossRef]
- Mukhamediev, R.I.; Yakunin, K.; Aubakirov, M.; Assanov, I.; Kuchin, Y.; Symagulov, A.; Levashenko, V.; Zaitseva, E.; Sokolov, D.; Amirgaliyev, Y. Coverage path planning optimization of heterogeneous UAVs group for precision agriculture. IEEE Access 2023, 11, 5789–5803. [Google Scholar] [CrossRef]
- Huang, J.; Du, B.; Zhang, Y.; Quan, Q.; Wang, B.; Mu, L. A pesticide spraying mission allocation and path planning with multicopters. IEEE Trans. Aerosp. Electron. Syst. 2024, 60, 2277–2291. [Google Scholar] [CrossRef]
- Gao, H.; Ma, X. Multiple chromosomes particle swarm optimization-based coverage path planning for complex surfaces spray painting. Int. J. Adv. Robot. Syst. 2024, 21, 17298806241238980. [Google Scholar] [CrossRef]
- Menon, B.K.; Deshpande, T.; Pal, A.; Kothandaraman, S. Critical regions identification and coverage using optimal drone flight path planning for precision agriculture. Results Eng. 2025, 25, 104081. [Google Scholar] [CrossRef]
- Mansur, H.; Gadhwal, M.; Abon, J.E.; Flippo, D. Mapping for Autonomous Navigation of Agricultural Robots through Crop Rows Using UAV. Agriculture 2025, 15, 882. [Google Scholar] [CrossRef]
- Monteiro, A.; von Wangenheim, A. Orthomosaic Dataset of RGB Aerial Images for Weed Mapping. 2019. Available online: https://lapix.ufsc.br/weed-mapping-sugar-cane/ (accessed on 7 June 2025).
- Long, J.; Shelhamer, E.; Darrell, T. Fully convolutional networks for semantic segmentation. In Proceedings of the 2015 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Boston, MA, USA, 7–12 June 2015; pp. 3431–3440. [Google Scholar]
- Yao, C.; Lv, D.; Li, H.; Fu, J.; Li, C.; Gao, X.; Hong, D. A real-time crop lodging recognition method for combine harvesters based on machine vision and modified DeepLab V3+. Smart Agric. Technol. 2025, 11, 100926. [Google Scholar] [CrossRef]
- Chai, T.; Xiao, Z.; Shen, X.; Liu, Q.; Li, N.; Guan, T.; Tian, J. TransDeep: Transformer-integrated DeepLabV3+ for image semantic segmentation. IEEE Access 2025, 13, 6277–6291. [Google Scholar] [CrossRef]
- Chen, L.C.; Zhu, Y.; Papandreou, G.; Schroff, F.; Adam, H. Encoder-decoder with atrous separable convolution for semantic image segmentation. In Proceedings of 15th European Conference, Munich, Germany, 8–14 September 2018; pp. 801–818. [Google Scholar]
- Choset, H.; Pignon, P. Coverage Path Planning: The Boustrophedon Cellular Decomposition. In Field and Service Robotics; Zelinsky, A., Ed.; Springer: London, UK, 1998; pp. 203–209. [Google Scholar]
- Ester, M.; Kriegel, H.P.; Sander, J.; Xu, X. A density-based algorithm for discovering clusters in large spatial databases with noise. In Proceedings of the Second International Conference on Knowledge Discovery and Data Mining, Portland, OR, USA, 2–4 August 1996; Volume 96, pp. 226–231. [Google Scholar]
- Ottoni, A.L.; Nepomuceno, E.G.; Oliveira, M.S.d.; Oliveira, D.C.d. Reinforcement learning for the traveling salesman problem with refueling. Complex Intell. Syst. 2022, 8, 2001–2015. [Google Scholar] [CrossRef]
- Levy, D.; Sundar, K.; Rathinam, S. Heuristics for routing heterogeneous unmanned vehicles with fuel constraints. Math. Probl. Eng. 2014, 2014, 131450. [Google Scholar] [CrossRef]
- Zhang, T.J.; Yang, Y.K.; Wang, B.H.; Li, Z.; Shen, H.X.; Li, H.N. Optimal scheduling for location geosynchronous satellites refueling problem. Acta Astronaut. 2019, 163, 264–271. [Google Scholar] [CrossRef]
- Suzuki, Y. A dual-objective metaheuristic approach to solve practical pollution routing problem. Int. J. Prod. Econ. 2016, 176, 143–153. [Google Scholar] [CrossRef]
- Karakostas, P.; Sifaleras, A. The pollution traveling salesman problem with refueling. Comput. Oper. Res. 2024, 167, 106661. [Google Scholar] [CrossRef]
- Marinello, F.; Pezzuolo, A.; Chiumenti, A.; Sartori, L. Technical analysis of unmanned aerial vehicles (drones) for agricultural applications. Eng. Rural. Dev. 2016, 15, 870–875. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Case Study | Inputs | Outputs | |||||
|---|---|---|---|---|---|---|---|
| Take-Off | [rad/s] | [s] | [s] | [rad] | [rad] with [19] | ||
| Polygon 1 * | (−70, 10) | 0.5468 | 566 | 1326.6 | 1.05 | 2 | 0.96 |
| (−70, 10) | 0.5468 | 618 | 1233.7 | 0 | 1 | 0.96 | |
| (100, 150) | 0.5468 | 618 | 1272.6 | 0.99 | 1 | 0.96 | |
| Polygon 2 * | (−50, 10) | 0.5468 | 566 | 1361.1 | 0.41 | 2 | 0.39 |
| (−50, 10) m | 0.5468 | 900 | 1303.3 | 0.41 | 1 | 0.39 | |
| (150, 0) | 0.5468 | 900 | 1315.5 | 1.41 | 1 | 0.39 | |
| Number of Polygons | Methods | Outputs | ||||
|---|---|---|---|---|---|---|
| TSPWR | Polygons Path Coverage | c[s] | (TSPWR)[s] | (path)[s] | ||
| 5 * | NN * | CPWR(Proposed) | 1 | 794.8499 | 0.0825 | 7.5010 |
| LSD [19] | 1 | 891.5273 | 0.0825 | 0.2777 | ||
| BCD [30] | 2 | 1.4271 | 0.0825 | 0.2665 | ||
| GA * | CPWR(Proposed) | 1 | 783.5653 | 0.8069 | 7.2825 | |
| LSD [19] | 1 | 888.8412 | 0.8069 | 0.2415 | ||
| BCD [30] | 2 | 1.3959 | 0.8069 | 0.2525 | ||
| 10 * | NN * | CPWR(Proposed) | 4 | 2.1616 | 0.0355 | 13.5424 |
| LSD [19] | 4 | 2.3686 | 0.0355 | 0.2970 | ||
| BCD [30] | 5 | 2.9621 | 0.0355 | 0.3072 | ||
| GA * | CPWR(Proposed) | 4 | 2.3359 | 0.6817 | 13.4818 | |
| LSD [19] | 4 | 2.4778 | 0.6817 | 0.2893 | ||
| BCD [30] | 5 | 2.9993 | 0.6817 | 0.3038 | ||
| 15 * | NN * | CPWR(Proposed) | 4 | 2.2924 | 0.0016 | 17.6082 |
| LSD [19] | 5 | 2.757 | 0.0016 | 0.4081 | ||
| BCD [30] | 6 | 3.3119 | 0.0016 | 0.3722 | ||
| GA * | CPWR(Proposed) | 5 | 2.6008 | 1.3718 | 18.5858 | |
| LSD [19] | 5 | 2.9200 | 1.3718 | 0.3953 | ||
| BCD [30] | 7 | 3.5144 | 1.3718 | 0.3674 | ||
| 20 * | NN * | CPWR(Proposed) | 4 | 2.4014 | 0.0079 | 18.7708 |
| LSD [19] | 5 | 2.7857 | 0.0079 | 0.3595 | ||
| BCD [30] | 7 | 3.7094 | 0.0079 | 0.3807 | ||
| GA * | CPWR(Proposed) | 5 | 2.8293 | 4.3596 | 20.1221 | |
| LSD [19] | 5 | 2.9386 | 4.3596 | 0.3547 | ||
| BCD [30] | 6 | 3.4553 | 4.3596 | 0.3826 | ||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lara-Molina, F.A. Optimization of Coverage Path Planning for Agricultural Drones in Weed-Infested Fields Using Semantic Segmentation. Agriculture 2025, 15, 1262. https://doi.org/10.3390/agriculture15121262
Lara-Molina FA. Optimization of Coverage Path Planning for Agricultural Drones in Weed-Infested Fields Using Semantic Segmentation. Agriculture. 2025; 15(12):1262. https://doi.org/10.3390/agriculture15121262
Chicago/Turabian StyleLara-Molina, Fabian Andres. 2025. "Optimization of Coverage Path Planning for Agricultural Drones in Weed-Infested Fields Using Semantic Segmentation" Agriculture 15, no. 12: 1262. https://doi.org/10.3390/agriculture15121262
APA StyleLara-Molina, F. A. (2025). Optimization of Coverage Path Planning for Agricultural Drones in Weed-Infested Fields Using Semantic Segmentation. Agriculture, 15(12), 1262. https://doi.org/10.3390/agriculture15121262